
Abstract
In agriculture, leaf area index (LAI) is an important variable that describes occurring biomass and relates to the distribution of energy fluxes and evapotranspiration components. Current LAI estimation methods at subfield scale are limited not only by the characteristics of the spatial data (pixel size and spectral information) but also by the empiricity of developed models, mostly based on vegetation indices, which do not necessarily scale spatiality (among different varieties or planting characteristics) or temporally (need for different LAI models for different phenological stages). Widely used machine learning (ML) algorithms and high-resolution small unmanned aerial system (sUAS) information provide an opportunity for spatial and temporal LAI estimation addressing the spatial and temporal limitations. In this study, considering both accuracy and efficiency, a point-cloud-based feature-extraction approach (Full Approach) and a raster-based feature-extraction approach (Fast Approach) using sUAS information were developed based on multiple growing seasons (2014–2019) to extract and generate vine-scale information for LAI estimation in commercial vineyards across California. Three known ML algorithms, Random Forest (RF), eXtreme Gradient Boosting (XGB), and Relevance Vector Machine (RVM), were considered, along with hybrid ML schemes based on those three algorithms, coupled with different feature-extraction approaches. Results showed that the hybrid ML technique using RF and RVM and the Fast Approach with 9 input variables, called RVM-RFFast model, performs better than others in a visual and statistical assessments of the generated LAI being also computationally efficient. Furthermore, using the generated LAI products in the quantification of energy balance using the two-source energy balance Priestley-Taylor version (TSEB-PT) model and EC tower data, the results indicated excellent estimation of net radiation (Rn) and latent heat flux (LE), good estimation of surface heat flux (G), and poor estimation of sensible heat flux (H). Additionally, TSEB-PT sensitivity analysis performed by regenerating LAI maps based on the generated LAI map (from − 15% of the original LAI map to + 15% with a 5% gap) showed that LAI uncertainty had a major impact on G, followed by evapotranspiration partitioning (T/ET), H, LE, and Rn. When considering the annual growth cycle of grapevines, the impact of LAI uncertainty on the T/ET in the veraison stage was larger than in the fruit set stage.











Similar content being viewed by others

Notes
Mention of trade names or commercial products in this publication is solely for the purpose of providing specific information and does not imply recommendation or endorsement by the U.S. Department of Agriculture.
References
Aboutalebi M, Torres-Rua AF, Kustas WP et al (2018) Assessment of different methods for shadow detection in high-resolution optical imagery and evaluation of shadow impact on calculation of NDVI, and evapotranspiration. Irrig Sci. https://doi.org/10.1007/s00271-018-0613-9
Aboutalebi M, Torres-Rua AF, McKee M et al (2019) Incorporation of unmanned aerial vehicle (UAV) point cloud products into remote sensing evapotranspiration models. Remote Sens 12:50. https://doi.org/10.3390/rs12010050
Abu-Rmileh A (2019) The Multiple faces of ‘Feature importance’ in XGBoost. In: Towar. Data Sci. https://towardsdatascience.com/be-careful-when-interpreting-your-features-importance-in-xgboost-6e16132588e7. Accessed 20 Mar 2021
Agam N, Kustas WP, Anderson MC et al (2010) Application of the priestley-taylor approach in a two-source surface energy balance model. J Hydrometeorol 11:185–198. https://doi.org/10.1175/2009JHM1124.1
Alfieri JG, Kustas WP, Nieto H et al (2019) Influence of wind direction on the surface roughness of vineyards. Irrig Sci 37:359–373. https://doi.org/10.1007/s00271-018-0610-z
Anderson MC (2012) Simple method for retrieving leaf area index from Landsat using MODIS leaf area index products as reference. J Appl Remote Sens 6:063554. https://doi.org/10.1117/1.jrs.6.063554
Arab ST, Noguchi R, Matsushita S, Ahamed T (2021) Prediction of grape yields from time-series vegetation indices using satellite remote sensing and a machine-learning approach. Remote Sens Appl Soc Environ 22:100485. https://doi.org/10.1016/j.rsase.2021.100485
Arlot S, Celisse A (2010) A survey of cross-validation procedures for model selection. Stat Surv 4:40–79. https://doi.org/10.1214/09-SS054
Ayars JE, Johnson RS, Phene CJ et al (2003) Water use by drip-irrigated late-season peaches. Irrig Sci 223(22):187–194. https://doi.org/10.1007/S00271-003-0084-4
Bachour R, Maslova I, Ticlavilca AM et al (2016) Wavelet-multivariate relevance vector machine hybrid model for forecasting daily evapotranspiration. Stoch Environ Res Risk Assess 30:103–117. https://doi.org/10.1007/s00477-015-1039-z
Baret F, Guyot G (1991) Potentials and limits of vegetation indices for LAI and APAR assessment. Remote Sens Environ 35:161–173. https://doi.org/10.1016/0034-4257(91)90009-U
Bellvert J, Jofre-Ĉekalović C, Pelechá A et al (2020) Feasibility of using the two-source energy balance model (TSEB) with sentinel-2 and sentinel-3 images to analyze the spatio-temporal variability of vine water status in a vineyard. Remote Sens 12:2299. https://doi.org/10.3390/rs12142299
Bendig J, Yu K, Aasen H et al (2015) Combining UAV-based plant height from crop surface models, visible, and near infrared vegetation indices for biomass monitoring in barley. Int J Appl Earth Obs Geoinf 39:79–87. https://doi.org/10.1016/j.jag.2015.02.012
Brown PMBLC, Hambley DF (2002) Statistics for environmental engineers. Environ Eng Geosci 8:244–245. https://doi.org/10.2113/8.3.244
Brümmer C, Black TA, Jassal RS et al (2012) How climate and vegetation type influence evapotranspiration and water use efficiency in Canadian forest, peatland and grassland ecosystems. Agric for Meteorol 153:14–30. https://doi.org/10.1016/j.agrformet.2011.04.008
Chason JW, Baldocchi DD, Huston MA (1991) A comparison of direct and indirect methods for estimating forest canopy leaf area. Agric for Meteorol 57:107–128. https://doi.org/10.1016/0168-1923(91)90081-Z
Chen T, Guestrin C (2016) XGBoost: a scalable tree boosting system. In: Proceedings of the ACM SIGKDD International Conference on Knowledge Discovery and Data Mining. pp 785–794
Comba L, Biglia A, Ricauda Aimonino D et al (2020) Leaf area index evaluation in vineyards using 3D point clouds from UAV imagery. Precision Agric 21:881–896. https://doi.org/10.1007/s11119-019-09699-x
Curran PJ, Milton EJ (1983) The relationships between the chlorophyll concentration, lai and reflectance of a simple vegetation canopy. Int J Remote Sens 4:247–255. https://doi.org/10.1080/01431168308948544
Douna V, Barraza V, Grings F et al (2021) Towards a remote sensing data based evapotranspiration estimation in Northern Australia using a simple random forest approach. J Arid Environ 191:104513. https://doi.org/10.1016/j.jaridenv.2021.104513
Dubčáková R (2011) Eureqa: software review. Genet Program Evolvable Mach 12:173–178
Elarab M, Ticlavilca AM, Torres-Rua AF et al (2015) Estimating chlorophyll with thermal and broadband multispectral high resolution imagery from an unmanned aerial system using relevance vector machines for precision agriculture. Int J Appl Earth Obs Geoinf 43:32–42. https://doi.org/10.1016/j.jag.2015.03.017
Elavarasan D, Vincent DR (2020) Reinforced XGBoost machine learning model for sustainable intelligent agrarian applications. J Intell Fuzzy Syst 39:7605–7620. https://doi.org/10.3233/JIFS-200862
Enquist BJ, Ebersolet JJ (1994) Effects of added water on photosynthesis of Bistorta vivipara: the importance of water relations and leaf nitrogen in two alpine communities, Pikes peak, Colorado, U.S.A. Arct Alp Res 26:29–34. https://doi.org/10.1080/00040851.1994.12003035
Feng L, Zhang Z, Ma Y et al (2020) Alfalfa yield prediction using UAV-based hyperspectral imagery and ensemble learning. Remote Sens. https://doi.org/10.3390/rs12122028
Filippi P, Jones EJ, Wimalathunge NS et al (2019) An approach to forecast grain crop yield using multi-layered, multi-farm data sets and machine learning. Precis Agric 20:1015–1029. https://doi.org/10.1007/s11119-018-09628-4
Fletcher T (2010) Relevance vector machines explained. Tech Rep - University College London, pp 1–9. http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.651.8603&rep=rep1&type=pdf
Gao BC (1996) NDWI - a normalized difference water index for remote sensing of vegetation liquid water from space. Remote Sens Environ 58:257–266. https://doi.org/10.1016/S0034-4257(96)00067-3
Gao R (2021) Goodness-of-fit model. In: GitHub. https://github.com/RuiGao9/GoodnessOfFitModel. Accessed 15 Apr 2021
Gao R, Torres-Rua AF (2021) Features extraction from the LAI2200C plant canopy analyzer. HydroShare. https://doi.org/10.4211/hs.6d0c4a14289742d0951ba5ab9eca7dc0
Gao R, Zeng R (2019) Detecting agricultural drainage ditch system in low relief land: a heterogeneous filtering approach. AGU Fall Meet Abstr 2019:H11I-1586
Gao R, Nassar A, Aboutalebi M et al (2020) Grapevine leaf area index estimation with machine learning and unmanned aerial vehicle information. AGU Fall Meet Abstr 2020:H008-0012
Gao R, Nassar A, Torres-Rua AF et al (2021a) Footprint area generating based on eddy covariance records. HydroShare. https://doi.org/10.4211/hs.9118e2c1034e40e4ba4721cd17702f70
Gao R, Torres-Rua AF, Aboutalebi M et al (2021b) Feature extraction approaches for leaf area index estimation in California vineyards via machine learning algorithms. HydroShare. https://doi.org/10.4211/hs.923cf9a7a3bb49369a4e65d48237002b
Gao R, Torres-Rua AF, Nassar A et al (2021c) Evapotranspiration partitioning assessment using a machine-learning-based leaf area index and the two-source energy balance model with sUAV information. Auton Air Gr Sens Syst Agric Optim Phenotyping VI 11747:21. https://doi.org/10.1117/12.2586259
Gao R, Torres-Rua AF, Nassar A et al (2021d) TSEB modeling and the comparison between the model results and the eddy-covariance monitored data within the footprint area. HydroShare. https://doi.org/10.4211/hs.eb6eeeccdbe546fc941f3c219cb05a34
Gower ST, Kucharik CJ, Norman JM (1999) Direct and indirect estimation of leaf area index, f(APAR), and net primary production of terrestrial ecosystems. Remote Sens Environ 70:29–51. https://doi.org/10.1016/S0034-4257(99)00056-5
Haboudane D, Miller JR, Pattey E, et al (2002) Effects of chlorophyll concentration on green LAI prediction in crop canopies: modelling and assessment. https://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.512.8135&rep=rep1&type=pdf
Haboudane D, Miller JR, Pattey E et al (2004) Hyperspectral vegetation indices and novel algorithms for predicting green LAI of crop canopies: modeling and validation in the context of precision agriculture. Remote Sens Environ 90:337–352. https://doi.org/10.1016/j.rse.2003.12.013
Hardin PJ, Jensen RR (2005) Neural network estimation of urban leaf area index. Giscience Remote Sens 42:251–274. https://doi.org/10.2747/1548-1603.42.3.251
Hassan-Esfahani L, Torres-Rua A, Jensen A, McKee M (2015) Assessment of surface soil moisture using high-resolution multi-spectral imagery and artificial neural networks. Remote Sens 7:2627–2646. https://doi.org/10.3390/RS70302627
Hassan-Esfahani L, Ebtehaj A, Torres-Rua A, McKee M (2017a) Spatial scale gap filling using an unmanned aerial system: a statistical downscaling method for applications in precision agriculture. Sensors 17:2106. https://doi.org/10.3390/s17092106
Hassan-Esfahani L, Torres-Rua A, Jensen A, Mckee M (2017b) Spatial root zone soil water content estimation in agricultural lands using Bayesian-based artificial neural networks and high- resolution visual, NIR, and thermal imagery. Irrig Drain 66:273–288. https://doi.org/10.1002/IRD.2098
Herrmann I, Pimstein A, Karnieli A et al (2011) LAI assessment of wheat and potato crops by VENμS and sentinel-2 bands. Remote Sens Environ 115:2141–2151. https://doi.org/10.1016/j.rse.2011.04.018
Hicks SK, Lascano RJ (1995) Estimation of leaf area index for cotton canopies using the LI-COR LAI-2000 plant canopy analyzer. Agron J 87:458–464. https://doi.org/10.2134/agronj1995.00021962008700030011x
Jayalakshmi T, AS-IJ Computer of 2011 U (2011) Statistical normalization and back propagation for classification. Int J Comp Theory Eng. https://doi.org/10.7763/IJCTE.2011.V3.288
Jonckheere I, Fleck S, Nackaerts K et al (2004) Review of methods for in situ leaf area index determination part I. Theories, sensors and hemispherical photography. Agric for Meteorol 121:19–35. https://doi.org/10.1016/j.agrformet.2003.08.027
Kamenova I, Filchev L, Ilieva I (2017) Review of spectral vegetation indices and methods for estimation of crop bio physical variables. Aerosp Res Bulg 29:72–82. https://doi.org/10.7546/AeReBu.29.18.01.06
Kamilaris A, Prenafeta-Boldú FX (2018) Deep learning in agriculture: a survey. Comput Electron Agric 147:70–90
Kang Y, Ozdogan M, Zhu X et al (2020) Comparative assessment of environmental variables and machine learning algorithms for maize yield prediction in the US Midwest. Environ Res Lett 15:064005. https://doi.org/10.1088/1748-9326/ab7df9
Khader AI, McKee M (2014) Use of a relevance vector machine for groundwater quality monitoring network design under uncertainty. Environ Model Softw 57:115–126. https://doi.org/10.1016/j.envsoft.2014.02.015
Kljun N, Calanca P, Rotach MW, Schmid HP (2015) A simple two-dimensional parameterisation for flux footprint prediction (FFP). Geosci Model Dev 8:3695–3713. https://doi.org/10.5194/gmd-8-3695-2015
Knipper K, Anderson M, Alfieri J (2018) Evapotranspiration estimates derived using thermal-based satellite remote sensing and data fusion for irrigation management in California vineyards advanced drought monitoring view project. Springer, pp 431–449
Knipper KR, Kustas WP, Anderson MC et al (2019) Evapotranspiration estimates derived using thermal-based satellite remote sensing and data fusion for irrigation management in California vineyards. Irrig Sci 37:431–449. https://doi.org/10.1007/s00271-018-0591-y
Kool D, Kustas WP, Ben-Gal A, Agam N (2021) Energy partitioning between plant canopy and soil, performance of the two-source energy balance model in a vineyard. Agric for Meteorol 300:108328. https://doi.org/10.1016/j.agrformet.2021.108328
Küßner R, Mosandl R (2000) Comparison of direct and indirect estimation of leaf area index in mature Norway spruce stands of eastern Germany. Can J for Res 30:440–447. https://doi.org/10.1139/x99-227
Kustas WP, Anderson MC, Alfieri JG et al (2018) The grape remote sensing atmospheric profile and evapotranspiration experiment. Bull Am Meteorol Soc 99:1791–1812. https://doi.org/10.1175/BAMS-D-16-0244.1
Kustas WP, Agam N, Ortega-Farias S (2019a) Forward to the GRAPEX special issue. Irrig Sci 37:221–226. https://doi.org/10.1007/s00271-019-00633-7
Kustas WP, Alfieri JG, Nieto H et al (2019b) Utility of the two-source energy balance (TSEB) model in vine and interrow flux partitioning over the growing season. Irrig Sci 37:375–388. https://doi.org/10.1007/s00271-018-0586-8
Legates DR, McCabe GJ (1999) Evaluating the use of “goodness-of-fit” Measures in hydrologic and hydroclimatic model validation. Water Resour Res 35:233–241. https://doi.org/10.1029/1998WR900018
Liakos KG, Busato P, Moshou D et al (2018) Machine learning in agriculture: a review. Sensors (switzerland) 18:2674
Lundberg S (2018) Interpretable machine learning with XGBoost. In: Towar. Data Sci. https://towardsdatascience.com/interpretable-machine-learning-with-xgboost-9ec80d148d27. Accessed 20 Mar 2021
Ma Y, Zhang Z, Kang Y, Özdoğan M (2021) Corn yield prediction and uncertainty analysis based on remotely sensed variables using a Bayesian neural network approach. Remote Sens Environ. https://doi.org/10.1016/j.rse.2021.112408
Manfreda S, McCabe MF, Miller PE et al (2018) On the use of unmanned aerial systems for environmental monitoring. Remote Sens 10:641
Mathews AJ, Jensen JLR (2013) Visualizing and quantifying vineyard canopy LAI using an unmanned aerial vehicle (UAV) collected high density structure from motion point cloud. Remote Sens 5:2164–2183. https://doi.org/10.3390/rs5052164
Nassar A, Torres-Rua A, Kustas W et al (2020a) Influence of model grid size on the estimation of surface fluxes using the two source energy balance model and sUAS imagery in vineyards. Remote Sens 12:342. https://doi.org/10.3390/rs12030342
Nassar A, Torres-Rua AF, Kustas WP et al (2020b) To what extend does the Eddy covariance footprint cutoff influence the estimation of surface energy fluxes using two source energy balance model and high-resolution imagery in commercial vineyards? In: Thomasson JA, Torres-Rua AF (eds) Autonomous Air and ground sensing systems for agricultural optimization and phenotyping V. SPIE-Intl Soc Optical Eng, p 16
Nassar A, Torres-Rua A, Merwade V et al (2021a) Development of high performance computing tools for estimation of high-resolution surface energy balance products using sUAS information. Int Soc Opt Photonics 11747:89–97. https://doi.org/10.1117/12.2587763
Nassar A, Torres-rua A, Kustas W et al (2021b) Assessing daily evapotranspiration methodologies from one-time-of-day suas and ec information in the grapex project. Remote Sens 13:2887. https://doi.org/10.3390/rs13152887
Nieto H, Kustas WP, Alfieri JG et al (2019a) Impact of different within-canopy wind attenuation formulations on modelling sensible heat flux using TSEB. Irrig Sci 37:315–331. https://doi.org/10.1007/s00271-018-0611-y
Nieto H, Kustas WP, Torres-Rúa A et al (2019b) Evaluation of TSEB turbulent fluxes using different methods for the retrieval of soil and canopy component temperatures from UAV thermal and multispectral imagery. Irrig Sci 37:389–406. https://doi.org/10.1007/s00271-018-0585-9
Omer G, Mutanga O, Abdel-Rahman E, Adam E (2016) Empirical prediction of leaf area index (LAI) of endangered tree species in intact and fragmented indigenous forests ecosystems using worldview-2 data and two robust machine learning algorithms. Remote Sens 8:324. https://doi.org/10.3390/rs8040324
Ortega-Farías S, Ortega-Salazar S, Poblete T et al (2016) Estimation of energy balance components over a drip-irrigated Olive Orchard using thermal and multispectral cameras placed on a helicopter-based unmanned aerial vehicle (UAV). Remote Sens 8(6388):6638. https://doi.org/10.3390/RS8080638
Pedregosa F, Varoquaus G, Gramfort A et al (2011) Scikit-learn: machine learning in python. J Mach Learn Res 12:2825–2830
Peng J, Jiang H, Liu Q et al (2021) Human activity vs. climate change: distinguishing dominant drivers on LAI dynamics in karst region of southwest China. Sci Total Environ 769:144297. https://doi.org/10.1016/j.scitotenv.2020.144297
Plonski P (2020) Random forest feature importance computed in 3 ways with Python. In: mljar. https://mljar.com/blog/feature-importance-in-random-forest/. Accessed 18 May 2021
Pope G, Treitz P (2013) Leaf area index (LAI) estimation in boreal mixedwood forest of Ontario, Canada using light detection and ranging (LiDAR) and worldview-2 imagery. Remote Sens 5:5040–5063. https://doi.org/10.3390/rs5105040
Pu R, Gong P (2004) Wavelet transform applied to EO-1 hyperspectral data for forest LAI and crown closure mapping. Remote Sens Environ 91:212–224. https://doi.org/10.1016/j.rse.2004.03.006
Ronaghan S (2018) The mathematics of decision trees, random forest and feature importance in scikit-learn and spark. In: Towar. Data Sci. https://towardsdatascience.com/the-mathematics-of-decision-trees-random-forest-and-feature-importance-in-scikit-learn-and-spark-f2861df67e3. Accessed 24 May 2021
Ruppert D (2004) The elements of statistical learning: data mining, inference, and prediction. J Am Stat Assoc 99:567–567. https://doi.org/10.1198/jasa.2004.s339
Schwankl L, Prichard T, Fulton A (2020) Almond irrigation improvement continuum. California
Sellers PJ, Dickinson RE, Randall DA et al (1997) Modeling the exchanges of energy, water, and carbon between continents and the atmosphere. Science. https://doi.org/10.1126/science.275.5299.502
Semmens KA, Anderson MC, Kustas WP et al (2016) Monitoring daily evapotranspiration over two California vineyards using Landsat 8 in a multi-sensor data fusion approach. Remote Sens Environ 185:155–170. https://doi.org/10.1016/j.rse.2015.10.025
Song L, Liu S, Kustas WP et al (2016) Application of remote sensing-based two-source energy balance model for mapping field surface fluxes with composite and component surface temperatures. Agric for Meteorol 230–231:8–19. https://doi.org/10.1016/j.agrformet.2016.01.005
Srinet R, Nandy S, Patel NR (2019) Estimating leaf area index and light extinction coefficient using random forest regression algorithm in a tropical moist deciduous forest, India. Ecol Inform 52:94–102. https://doi.org/10.1016/j.ecoinf.2019.05.008
Sun L, Gao F, Anderson M et al (2017) Daily mapping of 30 m LAI and NDVI for grape yield prediction in California vineyards. Remote Sens 9:317. https://doi.org/10.3390/rs9040317
Sun C, Feng L, Zhang Z et al (2020) Prediction of end-of-season tuber yield and tuber set in potatoes using in-season UAV-based hyperspectral imagery and machine learning. Sensors (switzerland) 20:1–13
Tipping ME (2001) Sparse Bayesian learning and the relevance vector machine. J Mach Learn Res 1:211–244. https://doi.org/10.1162/15324430152748236
Tipping ME (2004) Bayesian inference: an introduction to principles and practice in machine learning. Lect Notes Comput Sci (including Subser Lect Notes Artif Intell Lect Notes Bioinform) 3176:41–62. https://doi.org/10.1007/978-3-540-28650-9_3
Tmušić G, Manfreda S, Aasen H et al (2020) Current practices in UAS-based environmental monitoring. Remote Sens 12:1001. https://doi.org/10.3390/rs12061001
Tongson E, … SF-VIC (2017) Undefined canopy architecture assessment of cherry trees by cover photography based on variable light extinction coefficient modelled using artificial neural networks. actahort.org
Torres AF, Walker WR, McKee M (2011) Forecasting daily potential evapotranspiration using machine learning and limited climatic data. Agric Water Manag 98:553–562. https://doi.org/10.1016/j.agwat.2010.10.012
Torres-Rua A (2017) Vicarious calibration of sUAS microbolometer temperature imagery for estimation of radiometric land surface temperature. Sensors 17:1499. https://doi.org/10.3390/s17071499
Torres-Rua AF, Ticlavilca AM, Walker WR, McKee M (2012) Machine learning approaches for error correction of hydraulic simulation models for canal flow schemes. J Irrig Drain Eng 138:999–1010. https://doi.org/10.1061/(asce)ir.1943-4774.0000489
Torres-Rua A, Ticlavilca A, Bachour R et al (2016) Estimation of surface soil moisture in irrigated lands by assimilation of landsat vegetation indices, surface energy balance products, and relevance vector machines. Water 8:167. https://doi.org/10.3390/w8040167
Torres-Rua AF, Ticlavilca AM, Aboutalebi M et al (2020) Estimation of evapotranspiration and energy fluxes using a deep-learning-based high-resolution emissivity model and the two-source energy balance model with sUAS information. In: Thomasson JA, Torres-Rua AF (eds) Autonomous air and ground sensing systems for agricultural optimization and phenotyping V. SPIE-Intl Soc Optical Eng, p 10
van Klompenburg T, Kassahun A, Catal C (2020) Crop yield prediction using machine learning: a systematic literature review. Comput Electron Agric 177:105709
Watson DJ (1947) Comparative physiological studies on the growth of field crops: II. The effect of varying nutrient supply on net assimilation rate and leaf area. Ann Bot 11:375–407. https://doi.org/10.1093/oxfordjournals.aob.a083165
Welles JM, Norman JM (1991) Instrument for indirect measurement of canopy architecture. Agron J 83:818. https://doi.org/10.2134/agronj1991.00021962008300050009x
White WA, Alsina MM, Nieto H et al (2018) Determining a robust indirect measurement of leaf area index in California vineyards for validating remote sensing-based retrievals. Irrig Sci 37:269–280. https://doi.org/10.1007/s00271-018-0614-8
Wilhelm WW, Ruwe K, Schlemmer MR (2000) Comparison of three leaf area index meters in a corn canopy. Crop Sci 40:1179–1183. https://doi.org/10.2135/cropsci2000.4041179x
Xu T, Liang F (2021) Machine learning for hydrologic sciences: an introductory overview. Wiley Interdiscip Rev Water 8:e1533. https://doi.org/10.1002/WAT2.1533
Zhao al L, Wang L, Li J, et al (2021) Toward accurate estimating of crop leaf stomatal conductance combining thermal IR imaging, weather variables, and machine learning. Proc SPIE SPIEDigitalLibrary.org/conference-proceedings-of-spie 19. https://doi.org/10.1117/12.2587577
Zhou ZH (2016) Machine learning. Tsinghua University Press, Beijing
Acknowledgements
This study was possible thanks to support from USDA-Agricultural Research Service, NASA Applied Sciences Water Resources Grant NNX17AF51G and the Utah Water Research Laboratory Student Fellowship. The authors are also grateful for the extraordinary support from the Utah State University AggieAir sUAS program staff and E&J Gallo scientific teams for data collection support and analysis. The authors would like to thank Dr. Ayman Nassar for his preliminary work in TSEB model and footprint-area calculation; Wasim Akram Khan for helping with the computer parallelization; and Carri Richards for editing the manuscript.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
Appendix
Variables from the full feature extraction approach mentioned in Feature extraction approaches
See Table 4
Important variables supporting each ML algorithm mentioned in LAI model via the fast approach and Model selection for LAI estimation
The ANOVA and Tukey tests mentioned in Model selection for LAI estimation
The ANOVA and Tukey tests are used again to check whether the mean of different ML models, considering the input variables from both the Full and Fast approach, is statistically the same as the mean from the ground LAI measurements. Table 8 shows the results from both the ANOVA test and the Tukey test. The most important question at this point is whether the null hypothesis (the same as previously explained) is accepted when comparing the mean value of the ground measurements with the mean value estimated by the hybrid RVM-RF algorithm for both situations (input variables obtained from the Full approach and the Fast approach).
When evaluating the eight experiments based on the inputs from the Full approach, Table 5 reports different results compared with that shown in Fig. 7. Only three experiments, “RVM-XGBFull-Cover,” “RVM-RFFull,” and “RVM-XGBFull-Weight,” report the same mean value as the ground measurement. Evaluating the eight experiments based on the inputs from the Fast approach,
Table 6 shows a similar signal to Fig. 8. Except for the experiment called “RVM-XGBFast-Gain,” all of the combination models can provide the same mean estimation as the ground LAI measurements. Six experiments accepted the null hypothesis, which is more than when the Full approach is considered as the feature-extraction approach.
See Table 8
During the evaluation of each experiment, the most important point is verified: the null hypothesis is accepted for the hybrid RVM-RF algorithm for both situations. The difference shown in this table suggests that the ANOVA and Tukey tests are necessary as a confirmation tool to double-check the candidate ML algorithm.
Relevant locations mentioned in Model selection for LAI estimation for both RVM-RFFull and RVM-RFFast
Considering the characteristic of the RVM algorithm providing RVs, which have non-zero weights, from the training dataset (Tipping 2001; Fletcher 2010; Torres-Rua et al. 2012; Khader and McKee 2014), this section explores RV information based on the hybrid ML algorithm (RVM-RF). Since this structure provides accurate LAI estimation when considering the inputs from the Full approach and efficient LAI estimation when considering the Fast approach, the same process is explored under both situations: RVM-RFFull and RVM-RFFast.
RVM-RFFull model
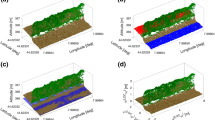
Figure 12 shows the geographic distribution of the training dataset (red circles) and the RVs (green circles). The green circles obtained from the RVM algorithm illustrate where the ground measurements are more important. For SLM, the RVs concentrate on the right side of the field, and one RV is located on the bare soil area. RIP 760 shows a pair of parallel lines and more RVs from the south line. RIP 720 recognizes only two positions on the northeast corner as important locations, and one of them provides the RV three times (another is two times). BAR recognizes around seven out of 49 positions as important locations, and most of them come from the south block. Taking more ground LAI measurements at the green-circle sites shown in Fig. 12 (a large variability is shown at these locations) would be recommended in the future if the combination of the RVM-RFFull model is adopted.
See Fig. 12

The geographic distribution of the RVs from the RVM-RFFull model
RVM-RFFast model
Similar to Figs. 12 and 13 shows the geographic distribution of the training dataset (red circles) and the RVs (green circles). One difference compared to Fig. 12 is that no position provides RVs three times. SLM identifies more RV locations. RIP 720 and RIP 760 each provide six RV positions. BAR identifies five positions corresponding to five RVs.
See Fig. 13

The geographic distribution of the RVs from the RVM-RFFast model
Rights and permissions
About this article

Cite this article
Gao, R., Torres-Rua, A.F., Aboutalebi, M. et al. LAI estimation across California vineyards using sUAS multi-seasonal multi-spectral, thermal, and elevation information and machine learning. Irrig Sci 40, 731–759 (2022). https://doi.org/10.1007/s00271-022-00776-0
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00271-022-00776-0