
Abstract
The World Summit on Sustainable Development (Johannesburg, 2002) encouraged the application of the ecosystem approach by 2010. However, at the same summit, the signatory States undertook to restore and exploit their stocks at maximum sustainable yield (MSY), a concept and practice without ecosystemic dimension, since MSY is computed species by species, on the basis of a monospecific model. Acknowledging this gap, we propose a definition of “ecosystem viable yields” (EVY) as yields compatible (a) with biological safety levels (over which biomasses can be maintained for all times) and (b) with an ecosystem dynamics. The difference from MSY is that this notion is not based on equilibrium but on viability theory, which offers advantages for robustness. For a generic class of multispecies models with harvesting, we provide explicit expressions for the EVY. We apply our approach to the anchovy–hake couple in the Peruvian upwelling ecosystem.

Similar content being viewed by others
Notes
A yield is said to be guaranteed if proper management can make so that catches remain above this yield for all times. The same definition applies to guaranteed biological minimal levels, but with biomasses instead of catches.
In fact, any expression of the form c(y,v), instead of v y, would fit for the catches in the following Proposition 2 as soon as v ↦c(y,v) is strictly increasing and goes from 0 to + ∞ when v goes from 0 to + ∞. The same holds for d(z,w) instead of w z.
In all that follows, a mapping φ: ℝ →ℝ is said to be increasing if \(x \geq x' \Rightarrow \varphi(x) \geq \varphi(x')\). The reverse holds for decreasing. Thus, with this definition, a constant mapping is both increasing and decreasing.
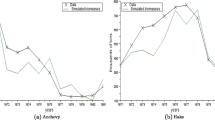
At this stage, we do not claim that the figures may be proposed as yields for the present management of hake–anchovy Peruvian fisheries. Indeed, our computations of EVY rely upon a dynamical model adjusted for some 30 years ago. To propose EVY, we should first dispose of a dynamical model adapted to the current situation because it ought to reflect the new ecosystem functioning and the depleted state of stocks [3]. This is beyond the scope of this paper.
In addition to hake, there are other important predators of anchovy in the Peruvian upwelling ecosystem, such as mackerel and horse mackerel, seabirds, and pinnipeds, which were not considered. Also, anchovy has been an important prey of hake, but other prey species have been found in the opportunistic diet of hake [35].
References
Alheit, J., & Niquen, M. (2004). Regime shifts in the Humboldt Current ecosystem. Progress in Oceanography, 60, 201–222.
Aubin, J.-P. (1991). Viability theory (542 pp.). Birkhäuser, Boston.
Ballón, M., Wosnitza-Mendo, C., Guevara-Carrasco, R., & Bertrand, A. (2008). The impact of overfishing and El Niño on the condition factor and reproductive success of Peruvian hake, Merluccius gayi peruanus. Progress In Oceanography, 79(2–4), 300–307.
Béné, C., Doyen, L. (2003). Sustainability of fisheries through marine reserves: a robust modeling analysis. Journal of Environmental Management, 69(1), 1–13.
Béné, C., Doyen, L., & Gabay, D. (2001). A viability analysis for a bio-economic model. Ecological Economics, 36, 385–396.
Bertrand, A., Segura, M., Gutiérrez, M., & Vásquez, L. (2004). From small-scale habitat loopholes to decadal cycles: a habitat-based hypothesis explaining fluctuation in pelagic fish populations off Peru. Fish and Fisheries, 5, 296–316.
Bertsekas, D., & Rhodes, I. (1971). On the minimax reachability of target sets and target tubes. Automatica, 7, 233–247.
Chapel, L., Deffuant, G., Martin, S., & Mullon, C. (2008). Defining yield policies in a viability approach. Ecological Modelling, 212(1–2), 10–15.
Checkley, D. M., Alheit, J., Ooseki, Y., & Roy, C. (2009). Climate change and small pelagic fish. Cambridge: Cambridge University Press.
Clark, C. W. (1990). Mathematical bioeconomics (2nd ed.). New York: Wiley.
Clarke, F. H., Ledayev, Y. S., Stern, R. J., & Wolenski, P. R. (1995). Qualitative properties of trajectories of control systems: A survey. Journal of Dynamical Control Systems, 1, 1–48.
De Lara, M., & Doyen, L. (2008). Sustainable management of natural resources. Mathematical models and methods. Berlin: Springer.
De Lara, M., & Martinet, V. (2009). Multi-criteria dynamic decision under uncertainty: a stochastic viability analysis and an application to sustainable fishery management. Mathematical Biosciences, 217(2), 118–124
De Lara, M., Doyen, L., Guilbaud, T., & Rochet, M.-J. (2007). Is a management framework based on spawning-stock biomass indicators sustainable? A viability approach. ICES Journal of Marine Science, 64(4), 761–767.
Doyen, L., & De Lara, M. (2010). Stochastic viability and dynamic programming. Systems and Control Letters, 59(10), 629–634.
Eisenack, K., Sheffran, J., & Kropp, J. (2006). The viability analysis of management frameworks for fisheries. Environmental Modeling and Assessment, 11(1), 69–79
FAO (1999). Indicators for sustainable development of marine capture fisheries (68 pp.). FAO Technical Guidelines for Responsible Fisheries 8, FAO.
Garcia, S., Zerbi, A., Aliaume, C., Do, T., Chi, & Lasserre, G. (2003). The ecosystem approach to fisheries. Issues, terminology, principles, institutional foundations, implementation and outlook. FAO Fisheries Technical Paper, 443(71 pp).
Hall, C. (1988). An assessment of several of the historically most influential theoretical models used in ecology and of the data provided in their support. Ecological Modelling, 43(1–2), 5–31.
Hollowed, A. B., Bax, N., Beamish, R., Collie, J., Fogarty, M., Livingston, P., et al. (2000). Are multispecies models an improvement on single-species models for measuring fishing impacts on marine ecosystems? ICES Journal of Marine Science 57(3), 707–719.
ICES (2004). Report of the ICES advisory committee on fishery management and advisory committee on ecosystems. ICES Advice (Vol. 1, 1544 pp.). ICES.
IMARPE (2000). Trabajos expuestos en el taller internacional sobre la anchoveta peruana (TIAP), 9–12 May 2000. Boletin del Instituto del Mar de Peru, 19, 1–2.
IMARPE (2004). Report of the first session of the international panel of experts for assessment of Peruvian hake population, March 2003. Boletin del Instituto del Mar de Peru, 21, 33–78.
Katz, S. L., Zabel, R., Harvey, C., Good, T., & Levin, P. (2003). Ecologically sustainable yield. American Scientist, 91(2), 150.
Larkin, P. A. (1977). An epitaph for the concept of maximum sustained yield. Transactions of the American Fisheries Society, 106(1), 1–11.
Mullon, C., Cury, P., & Shannon, L. (2004). Viability model of trophic interactions in marine ecosystems. Natural Resource Modeling, 17, 27–58.
Murray, J. D. (2002). Mathematical biology (3rd ed.). Berlin: Springer-Verlag.
Pauly, D., & Palomares, M. L. (1989). New estimates of monthly biomass, recruitment and related statistics of anchoveta (Engraulis ringens) off Peru (4-14 °S), 1953–1985, pp. 189–206. In: D Pauly, P muck, J. Mendo & I Tsukayama (eds.) The Peruvian upwelling ecosystems: dynamics and interactions (18: 438). Manila, ICLARM Conference Proceedings.
PRODUCE (2005). Establecen régimen provisional de pesca del recurso merluza correspondiente al año 2006. El Peruano (p. 307804), 30 de diciembre 2005. RM-356-2005-PRODUCE.
PRODUCE (2006). Establecen régimen provisional de pesca del recurso merluza correspondiente al año 2007. El Peruano (p. 335485), 27 de diciembre 2006. RM-357-2006-PRODUCE.
Rapaport, A., Terreaux, J.-P., & Doyen, L. (2006). Sustainable management of renewable resource: a viability approach. Mathematics and Computer Modeling, 43(5–6), 466–484.
Saint-Pierre, P. (1994). Approximation of viability kernel. Applied Mathematics and Optimization, 29, 187–209.
Schaefer, M. B. (1954). Some aspects of the dynamics of populations important to the management of commercial marine fisheries. Bulletin of the Inter-American Tropical Tuna Commission, 1, 25–56.
Sun, C.-H., Chiang, F.-S., Liu, T.-S., & C.-C. Chang (2001). A welfare analysis of El Niño forecasts in the international trade of fish meal—an application of stochastic spatial equilibrium model. In 2001 Annual meeting, August 5–8. Chicago, IL 20770: American Agricultural Economics Association (New Name 2008: Agricultural and Applied Economics Association).
Tam, J., Purca, S., Duarte, L. O., Blaskovic, V., & Espinoza, P. (2006). Changes in the diet of hake associated with El Niño 1997–1998 in the Northern Humboldt Current ecosystem. Advances in Geosciences, 6, 63–67.
Acknowledgements
This paper was prepared within the Mathematics, Informatics and Fisheries Management international research network. We thank CNRS, INRIA and the French Ministry of Foreign Affairs for their funding and support through the regional cooperation program STIC–AmSud. Ricardo Oliveros Ramos was supported by an individual doctoral research grant (BSTD) from the “Support and training of scientific communities of the South Department” (DSF) of IRD, managed by Egide. We thank the staff of the Peruvian Marine Research Institute (IMARPE), especially Erich Diaz and Nathaly Vargas for discussions on anchovy and hake fisheries. We thank Sophie Bertrand and Arnaud Bertrand from IRD at IMARPE for their insightful comments. We also thank Yboon Garcia (IMCA-Peru and CMM-Chile) for a discussion on the ecosystem model case. We are particularly indebted to the reviewer who, by his/her comments and questions, helped us improve the study presentation.
Author information
Authors and Affiliations
Corresponding author
Appendices
Appendix 1: Discrete Time Viability
Let us consider a nonlinear control system described in discrete time by the dynamic equation
where the state variable x(t) belongs to the finite dimensional state space \({\mathbb X}=\mathbb{R}^{n_{{\mathbb X}}}\), the control variable u(t) is an element of the control set \({\mathbb U}=\mathbb{R}^{n_{{\mathbb U}}}\) while the dynamics f maps \({\mathbb X} \times {\mathbb U}\) into \({\mathbb X}\).
A controller or a decision maker describes “acceptable configurations of the system” through a set \({\mathbb D} \subset {\mathbb X} \times {\mathbb U}\) termed the acceptable set
where \({\mathbb D} \) includes both system states and controls constraints.
The state constraints set \(\mathbb{V}^0\) associated with \({\mathbb D} \) is obtained by projecting the acceptable set \({\mathbb D} \) onto the state space \({\mathbb X}\):
Viability is defined as the ability to choose, at each time step t ∈ ℕ, a control \(u(t) \in {\mathbb U}\) such that the system configuration remains acceptable. More precisely, viability occurs when the following set of initial states is not empty:
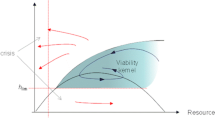
The set \(\mathbb{V}({f},{\mathbb D} )\) is called the viability kernel [2] associated with the dynamics f and the acceptable set \({\mathbb D} \). By definition, we have \(\mathbb{V}({f},{\mathbb D}) \subset \mathbb{V}^0 ={\rm Proj}_{{\mathbb X}}({\mathbb D} )\), but in general, the inclusion is strict. For a decision maker or control designer, knowing the viability kernel is of practical interest since it describes the initial states for which controls can be found that maintain the system in an acceptable configuration forever. However, computing this kernel is not an easy task in general.
We now focus on some tools to achieve viability. A subset \(\mathbb{V}\) is said to be weakly invariant for the dynamics f in the acceptable set \({\mathbb D} \) or a viability domain of f in \({\mathbb D} \), if
That is, if one starts from \(\mathbb{V}\), an acceptable control may transfer the state in \(\mathbb{V}\). Moreover, according to viability theory [2], the viability kernel \(\mathbb{V}({f},{\mathbb D} )\) turns out to be the union of all viability domains or also the largest viability domain:
Viable controls are those controls \(u \in {\mathbb U} \) such that \( (x,u) \in {\mathbb D} \) and \( {f}(x,u) \in \mathbb{V}({f},{\mathbb D}) \).
A major interest of such a property lies in the fact that any viability domain for the dynamics f in the acceptable set \({\mathbb D} \) provides a lower approximation of the viability kernel. An upper approximation \(\mathbb{V}_k\) of the viability kernel is given by the so-called viability kernel until time k associated with f in \({\mathbb D} \):
We have
It may be seen by induction that the decreasing sequence of viability kernels until time k satisfies
By Eq. 23, such an algorithm provides approximation from above of the viability kernel as follows:
Conditions ensuring that equality holds may be found in [32]. Notice that, when the decreasing sequence \((\mathbb{V}_{k})_{k \in \mathbb{N}}\) of viability kernels up to time k is stationary; its limit is the viability kernel. Indeed, if \(\mathbb{V}_{k} = \mathbb{V}_{k+1} \) for some k, then \(\mathbb{V}_{k}\) is a viability domain by Eq. 24. Now, by Eq. 19, \(\mathbb{V}({f},{\mathbb D} ) \) is the largest of viability domains. As a consequence, \(\mathbb{V}_{k} = \mathbb{V}({f},{\mathbb D} ) \) since \( \mathbb{V}({f},{\mathbb D} ) \subset \mathbb{V}_{k}\) by Eq. 23. We shall use this property in the following Appendix 2.
Appendix 2: Viable Control of Generic Nonlinear Ecosystem Models with Harvesting
For a generic ecosystem model 1, we provide an explicit description of the viability kernel. Then, we shall specify the results for predator–prey systems, in particular, for discrete time Lotka–Volterra models.
The acceptable set \({\mathbb D}\) in Eq. 17 is defined by minimal biomass levels \({B_{y}}{^{\flat}}\geq 0\), \({B_{z}}{^{\flat}}\geq 0\) and minimal catch levels \({C_{y}}{^{\flat}}\geq 0\), \({C_{z}}{^{\flat}}\geq 0\):
1.1 2.1 Expression of the Viability Kernel
The following Proposition 5 gives an explicit description of the viability kernel, under some conditions on the minimal levels.
Proposition 5
Assume that the function R y :ℝ3 →ℝ is continuously decreasing in the control v and satisfies lim v → + ∞ R y (y,z,v) ≤ 0, and that R z :ℝ3 →ℝ is continuously decreasing in the control variable w and satisfies lim w → + ∞ R z (y,z,w) ≤ 0. If the minimal levels in Eq. 26 are such that the following growth factors are greater than one
the viability kernel associated with the dynamics f in Eq. 1 and the acceptable set \({\mathbb D}\) in Eq. 26 is given by
Proof
According to induction 24, we have:
We shall now make use of the property, recalled in Appendix 1, that when the decreasing sequence \((\mathbb{V}_{k})_{k \in \mathbb{N}}\) of viability kernels up to time k is stationary, its limit is the viability kernel \( \mathbb{V}({f},{\mathbb D} )\). Hence, it suffices to show that \(\mathbb{V}_1\subset \mathbb{V}_2\) to obtain that \( \mathbb{V}({f},{\mathbb D}) = \mathbb{V}_1\). Let \(({y},{z})\in \mathbb{V}_1\), so that
Since R y :ℝ3 →ℝ is continuously decreasing in the control variable, with lim v → + ∞ R y (y,z,v) ≤ 0 and since \({y}{R_{{y}}}({y},{z},\frac{{C_{y}}{^{\flat}}}{{y}}) \geq {B_{y}}{^{\flat}}\), there exists a \(\hat{{v}} \geq \frac{{C_{y}}{^{\flat}}}{{y}}\) (depending on y and z) such that \({y}'={y}{R_{{y}}}({y},{z},\hat{{v}})= {B_{y}}{^{\flat}}\). The same holds for R z :ℝ3 →ℝ and \({z}'={z}{R_{{z}}}({y},{z},\hat{{w}})= {B_{z}}{^{\flat}}\). By Eq. 27, we deduce that
The inclusion \(\mathbb{V}_1\subset \mathbb{V}_2\) follows.□
Corollary 6
Suppose that the assumptions of Proposition 2 are satisfied. Denoting
the set of viable controls is given by
where y′ = yR y (y,z,v), z′ = zR z (y,z,w) .
1.2 2.2 Proof of Proposition 4
Proof
By Eq. 9 and the property that both R y and R z are decreasing in the control variable, the quantities 8 exist.
Also since both R y and R z are decreasing in the control variable, we obtain that
To end, the above inequalities and the assumption that \( {y}_0 \geq {B_{y}}{^{\flat}}\) and \({z}_0 \geq {B_{z}}{^{\flat}}\) allow us to conclude, thanks to Proposition 5, that (y 0,z 0) belongs to the viability kernel \( \mathbb{V}({f},{\mathbb D}) \) given in Eq. 28.
In other words, starting from the initial point (y(t 0),z(t 0)) = (y 0,z 0) , there exists an appropriate harvesting path which can provide, for all times, at least the catches Eq. 8.□
Rights and permissions
About this article
Cite this article
De Lara, M., Ocaña, E., Oliveros-Ramos, R. et al. Ecosystem Viable Yields. Environ Model Assess 17, 565–575 (2012). https://doi.org/10.1007/s10666-012-9321-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10666-012-9321-7