
Abstract
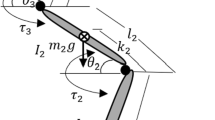
A two-step identification method is used to evaluate a generalized model of human postural control in the sagittal plane. Postural dynamics are represented as a planar open-chain linkage system supported by a triangular foot. The control mechanism is modeled as a state feedback element in which the torque acting at a given link is an arbitrary function of the state variables — angles and angular velocities. To validate the approach, six normal subjects underwent two series of experiments. The first series were used to determine an appropriate model of the system dynamics. The second series were used to estimate the parameters of the feedback model. A computer simulation of the complete system shows that the model predictions closely match the observed responses. These results suggest that the proposed model provides a useful framework for analysis of postural control mechanisms.
Similar content being viewed by others


References
Barin K (1983) An experimental study of multi-link models of human postural dynamics and control. Ph. D. dissertation, The Ohio State University, Columbus, Ohio
Barin K, Stockwell CW (1986) Parameter estimation of a model of human postural control. In: Kondraske GV, Robinson CJ (eds) Proceedings of the 8th Annual Conference of the IEEE/Engineering in Medicine in Biology Society, pp 1571–1574
Barin K, McGhee RB, Koozekanani SH, Stockwell CW (1984) Computationally efficient methods for simulation of human body dynamics. In: Amico V, Clymer AB (eds) All About Simulators 1984. Society for Computer Simulation, La Jolla, Calif. pp 282–287
Brooks VB (1986) The neural basis of motor control. Oxford University Press, New York
Camana PC, Hemami H, Stockwell CW (1977) Determination of feedback for human posture control without physical intervention J Cybern 7:199–225
Clauser CE, McConville JT, Young JW (1969) Weight, volume, and center of mass of segments of the human body. AMRL-TR-69–70, Wright-Patterson Air Force Base, Ohio
Contini R (1972) Body segment parameters, part II. Artif Limbs 16:1–19
Dempster WT, Gaughran GRL (1967) Properties of body segments based on size and weight. Am J Anat 120:33–54
Drillis R, Contini R (1966) Body segment parameters. Technical Report 1166. 03, New York University, New York
Gurfinkel VS (1973) Physical foundations of stabilography. Agressologie 14C:9–14
Gurfinkel VS, Lipshits MI, Popov KY (1974) Is the stretch reflex the main mechanism in the system of regulation of the vertical posture of man? Biophysics 19:744–748
Hanavan EP (1964) A mathematical model of the human body. AMRL-Technical Report 64–102, Wright-Patterson Air Force Base, Ohio
Hatze H (1980a) Neuromusculoskeletal control systems modeling — a critical survey of recent developments. IEEE Trans AC-25:375–385
Hatze H (1980b) A mathematical model for the computational determination of parameter values of the anthropomorphic segments. J Biomech 13:833–843
Hatze H (1981) A comprehensive model for human motion simulation and its application to the take-off phase of the long jump. J Biomech 14:3:135–142
Hemami H (1980) A feedback on-off model of biped dynamics. IEEE Trans SMC-10:376–383
Hemami H, Camana PC (1976) Nonlinear feedback in simple locomotion systems. IEEE Trans AC-21:855–860
Hemami H, Golliday CL, Jr (1977) The inverted pendulum and biped stability. Math Biosci 34:95–110
Hemami H, Jaswa VC (1978) On a three-link model of the dynamics of standing up and sitting down. IEEE Trans SMC-8:115–120
Hemami H, Stokes BT (1983) A qualitative discussion of mechanisms of feedback and feedforward in the control of locomotion. IEEE Trans BME-30:681–689
Herman RM et al. (eds) (1976) Neural control of locomotion. Plenum Press, New York
Hollerbach JM (1980) A recursive Lagrangian formulation of manipulator dynamics and a comparative study of dynamics formulation complexity. IEEE Trans SMC-10:730–736
Horak FB, Nashner LM (1986) Central programming of postural movements: adaptations to altered support-surface configurations. J Neurophysiol 55:1369–1381
Jensen RK (1978) Estimation of the biomechanical properties of three body types using a photogrammetric method. J Biomech 11:349–358
McGhee RB, Koozekanani SH, Weimer FC, Rahmani S (1979)Dynamic modeling of human locomotion. Proceedings of the 1979 Joint Automatic Control Conference, pp 405–413
Nashner LM (1971) A model describing vestibular detection of body sway motion. Acta Otolaryngol 72:429–436
Nashner LM (1972) Vestibular postural control model. Kybernetik 10:106–109
Nashner LM, McCollum G (1985) The organization of human postural movements: a format basis and experimental synthesis. Behav Brain Sci 8:135–172
Neter J, Wasserman W (1974) Applied linear statistical models. Irwin, Homewood, Ill
Romberg MH (1853) Manual of nervous disorders of man. Sydenham Society, London, pp 395–401
Stockwell CW, Koozekanani SH, Barin K (1981) A physical model of human postural dynamics. Ann NY Acad Sci 374:722–730
Author information
Authors and Affiliations
Additional information
This work was supported by the National Institutes of Health under Grant NS 21363
Rights and permissions
About this article
Cite this article
Barin, K. Evaluation of a generalized model of human postural dynamics and control in the sagittal plane. Biol. Cybern. 61, 37–50 (1989). https://doi.org/10.1007/BF00204758
Received:
Accepted:
Issue Date:
DOI: https://doi.org/10.1007/BF00204758