
Abstract
We formulate a geometric nonlinear theory of the mechanics of accretion. In this theory, the material manifold of an accreting body is represented by a time-dependent Riemannian manifold with a time-independent metric that at each point depends on the state of deformation at that point at its time of attachment to the body, and on the way the new material is added to the body. We study the incompatibilities induced by accretion through the analysis of the material metric and its curvature in relation to the foliated structure of the accreted body. Balance laws are discussed and the initial boundary value problem of accretion is formulated. The particular cases where the growth surface is either fixed or traction-free are studied and some analytical results are provided. We numerically solve several accretion problems and calculate the residual stresses in nonlinear elastic bodies induced from accretion.



















Similar content being viewed by others

Notes
The tangent bundle \(T\Omega _t\) of \(\Omega _t \subset \mathcal {M}\), is the union of all \(T_X\Omega _t\)’s for \(X\in \Omega _t\), i.e., the set of all vectors that are tangent to \(\Omega _t\). Therefore, with \(\bar{\mathbf {F}}\vert _{T\Omega _t}\) we indicate the restriction of \(\bar{\mathbf {F}}\) operating on tangent vectors on \(\Omega _t\). \(T\bar{\varphi }\vert _{T\Omega _t}\) and \(\mathbf {F}_t\vert _{T\Omega _t}\) are defined similarly. We use the same notation for \(T\omega _t\).
It is related to the flux of mass in the way explained in Sect. 4.1.
We assume that the growth velocity is a given vector field on the boundary of the deformed body. However, in a coupled theory of accretion it would be one of the unknown fields. In this paper we assume that this vector field is given and focus our attention on formulating the nonlinear elasticity problem. Extending the present theory to consider the coupling between mass transport and elasticity will be the subject of a future communication.
The translation operation would force one to work with shifters when using curvilinear coordinates (see Marsden and Hughes 1983). Here, for the sake of simplicity, we use Cartesian coordinates.
Recall that a motion \(\varphi '\) for an accreting body is a time-dependent map with a time-dependent domain, i.e., \(\varphi '_t : \mathcal {B}_t \rightarrow \mathcal {S}\).
In simple bodies the mechanical response at each point only depends on the local state of deformation. Therefore, in the elasticity of simple bodies, when two material manifolds \(({\mathcal {B}},{\mathbf {G}})\) and \(({\mathcal {B}}',{\mathbf {G}}')\) are isometric through \(\lambda :\mathcal B\rightarrow {\mathcal {B}}'\), if \(\varphi :{\mathcal {B}}\rightarrow {\mathcal {S}}\) is a solution of the balance equations for \(({\mathcal {B}},{\mathbf {G}})\), then \(\varphi ' = \varphi \circ \lambda ^{-1}:{\mathcal {B}}' \rightarrow {\mathcal {S}}\) is a solution for \(({\mathcal {B}}',{\mathbf {G}}')\).
In the linear analysis a similar assumption is used, e.g., in Kadish et al. (2005): “We assume that the material of the sphere behaves elastically once it has accreted.” This means that incompatibility at a material point is caused only at the time of its attachment (or before), and therefore, one can write \(\varvec{\epsilon }(x,t) = \varvec{\epsilon }^{\text {inc}}(x) + \varvec{\epsilon }^{\text {comp}}(x,t)\) for \(t>\tau (x)\) (see also Schwerdtfeger et al. 1998).
We should mention that the idea of decomposing reference configuration of a body into two-dimensional subbodies was investigated in the work of Wang (1968) on the so-called laminated bodies.
The Lie brackets are defined in Appendix A.
The commutator can be calculated entirely with respect to the frame \(\breve{\mathfrak {F}}\), i.e., \(\Upsilon ^{\breve{I}}{}_{\breve{J}\breve{K}} = [\breve{\mathbf {E}}_{\breve{J}},\breve{\mathbf {E}}_{\breve{K}}]^{\breve{I}}\), which has the following components
$$\begin{aligned} \breve{\Upsilon }^{\breve{I}}{}_{AB} = 0 ~,\quad \breve{\Upsilon }^B{}_{AN} = - \breve{\Upsilon }^B{}_{NA} = \frac{\partial N^B}{\partial \Xi ^A} - \frac{N^B}{N^3} \frac{\partial N^3}{\partial \Xi ^A} ~,\quad \breve{\Upsilon }^N{}_{AN} = - \breve{\Upsilon }^N{}_{NA} = \frac{1}{N^3} \frac{\partial N^3}{\partial \Xi ^A}. \nonumber \\ \end{aligned}$$(3.14)Note that these coefficients do not constitute the components of a tensor, as they vanish in some frames (the holonomic ones) and are nonzero in some other frames (the non-holonomic ones).
Note that the Christoffel symbols do not constitute a tensorial object; they transform in the following way
$$\begin{aligned} \breve{\Gamma }^{\breve{I}}{}_{{\breve{J}}{\breve{K}}} = (A^{-1})^{\breve{I}}{}_I A^J{}_{\breve{J}} A^K{}_{\breve{K}} \Gamma ^I{}_{JK} + (A^{-1})^{\breve{I}}{}_I A^I{}_{\breve{I}},_{\breve{K}} , \end{aligned}$$where \(A^I{}_{\breve{I}}\) represent the change of basis given in (3.3), i.e., \(\mathbf {e}_I = (A^{-1})^{\breve{I}}{}_I \breve{\mathbf {e}}_{\breve{I}}\).
Note that \(\mathbf {G}({\mathbf {Q}}^{-1}\mathbf {n},{\mathbf {Q}}^{-1}\mathbf {n}) = ({\mathbf {Q}}^{-\star }\mathbf {G}\mathbf {Q}^{-1})(\mathbf {n},\mathbf {n}) =\mathbf {g}(\mathbf {n},\mathbf {n})=1.\) Moreover, for any \(\mathbf {Y}\) tangent to \(\Omega \) there exists a \({\mathbf {y}}=\mathbf {Q}{\mathbf {Y}}\) tangent to \(\omega \), so one has \(\mathbf {G}(\mathbf {Q}^{-1}\mathbf {n},\mathbf {Y}) = \mathbf {G}(\mathbf {Q}^{-1}\mathbf {n},{\mathbf {Q}}^{-1}\mathbf {y}) = (\mathbf {Q}^{-\star }\mathbf {G}{\mathbf {Q}}^{-1})(\mathbf {n}, {\mathbf {y}}) = \mathbf {g}(\mathbf {n}, {\mathbf {y}})=0\). Therefore, \({\mathbf {N}}=\mathbf {Q}^{-1}{\mathbf {n}}\).
Indicating with \(\tilde{g}_{ab}\) the components of the first fundamental form of \(\omega \) (with respect to a coordinate chart \((\xi ^1,\xi ^2)\) on the surface), one also has \(\eta _A = Q^a{}_A Q^b{}_B \tilde{g}_{ab} (Q^{-1})^B{}_c u^c = Q^a{}_A \tilde{g}_{ac} u^c\).
Note that while a function \({\mathcal {W}}(X,{\mathbf {C}})\) is automatically objective, objectivity needs to be imposed on an energy function \(W(X,{\mathbf {F}})\).
In fact, \(\tilde{\nabla }\mathbf {U}^{\parallel } = \mathbf {0}\), and so the first two terms of (3.28) vanish. As for the third term, note that since every point on a \(\tau \)-line is mapped to the same point on \(\omega \), the components of \(\bar{\mathbf {F}}\vert _{T\Omega }\) are constant along \(\tau \), i.e., \(\partial _{\tau } \bar{F}^i{}_A = 0\). Therefore, \(\partial _{\tau } \tilde{G}_{AB}=\partial _{\tau } ( \bar{F}^i{}_A \bar{F}^j{}_B g_{ij} )=0\), as the components of the ambient metric on a fixed surface are constant along \(\tau \) as well.
An energy function at a point X is rank-one convex if
$$\begin{aligned} W(X,{\mathbf {F}} + s {\mathbf {z}} \otimes \varvec{\zeta }) \le W(X,{\mathbf {F}}) + s W(X, {\mathbf {F}} + {\mathbf {z}} \otimes \varvec{\zeta }) , \end{aligned}$$for any \({\mathbf {F}}\), any spatial vector \({\mathbf {z}}\in T_X\mathcal S\), any linear form \(\varvec{\zeta } \in T_X^*{\mathcal {B}}\), and \(0\le s \le 1\). One can show that rank-one convexity is equivalent to the monotonicity of the function \(f(s) = \varvec{{\mathcal {P}}} (X,{\mathbf {F}} + s {\mathbf {z}} \otimes \varvec{\zeta }) : ({\mathbf {z}} \otimes \varvec{\zeta })\). Rank-one convexity is a necessary condition for quasiconvexity (and polyconvexity), which is related to the existence of minimizers of the total energy functional in hyperelasticity (Ball 1976).
Note that by hypothesis \({\mathbf {P}} {\mathbf {N}} = {\mathbf {0}}\), which in the compressible case reads \(\varvec{{\mathcal {P}}}({\mathbf {F}}) {\mathbf {N}} = {\mathbf {0}}\), and provides three scalar equations for the three unknowns represented by the components of \(\bar{\mathbf {F}} {\mathbf {U}}\). A solution is clearly given by \(\bar{\mathbf {F}} {\mathbf {U}}={\mathbf {u}}\), which means that \(\bar{{\mathbf {F}}} = {\mathbf {Q}}\) as the two tensors already agree on the layer. However, this does not need to be the only solution because of the nonlinearity of the equations. In the incompressible case, things are slightly more complicated due to the presence of an unknown pressure field p that changes the zero-traction condition to \({\mathbf {P}} {\mathbf {N}} = \varvec{{\mathcal {P}}}({\mathbf {F}}) {\mathbf {N}} + p ( \mathbf {F}^{-1}{\mathbf {N}})^{\sharp } = {\mathbf {0}}\). We use an energetic argument and rank-one convexity of the energy function to show that \(\bar{{\mathbf {F}}} = {\mathbf {Q}}\) is the only solution.
Equivalently, one can say that the material metric is the right Cauchy–Green strain tensor associated with the accretion tensor \({\mathbf {Q}}\) (see Remark 2.11).
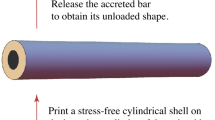
This can be pictured as a reference cylinder that grows at the same rate as prescribed by the spatial growth velocity u(t) . This also represents the configuration of the body in the case where no deformation occurs during the accretion process.
If the growth surface is traction-free, from Proposition 5.4 one obtains \(\bar{{\mathbf {F}}}={\mathbf {Q}}\), i.e., \(\frac{\partial r}{\partial \tau }(\tau ,\tau )=u(\tau )\). Then, one has
$$\begin{aligned} w(\tau ) = \bar{r}'(\tau ) = \frac{\partial r}{\partial \tau }(\tau ,\tau ) + \frac{\partial r}{\partial t}(\tau ,\tau ) = u(\tau ) + v(\tau ) , \end{aligned}$$and so one recovers \({\mathbf {w}} ={\mathbf {u}} +{\mathbf {v}}\). In Sozio and Yavari (2017), we assumed \(\frac{\partial r}{\partial \tau }(\tau ,\tau )=u(\tau )\) a priori, which is now justified by Proposition 5.4 as we were dealing with a traction-free growth surface. However, we should emphasize that, in general, this does not hold when traction does not vanish on the growth surface.
The coordinate-free constitutive expression for the \(1\atopwithdelims ()1\) variant \({\mathbf {P}}^{\flat }\) of \({\mathbf {P}}\) with components \(P_i{}^J=g_{ij}P^{jJ}\), is written as
$$\begin{aligned} {\mathbf {P}}^{\flat } = \mu \left( {\mathbf {F}}^{\top } - {\mathbf {F}}^{-1} \right) + \lambda J(J-1) {\mathbf {F}}^{-1},\quad {\mathbf {P}}^{\flat } = \mu {\mathbf {F}}^{\top } +p {\mathbf {F}}^{-1}, \end{aligned}$$for the compressible and the incompressible cases, respectively.
References
Abi-Akl, R., Abeyaratne, R., Cohen, T.: Kinetics of Surface Growth with Coupled Diffusion and the Emergence of a Universal Growth Path. arXiv:1803.08399 (2018)
Arnowitt, R., Deser, S., Misner, C.W.: Dynamical structure and definition of energy in general relativity. Phys. Rev. 116(5), 1322 (1959)
Ball, J.M.: Convexity conditions and existence theorems in nonlinear elasticity. Arch. Ration. Mech. Anal. 63(4), 337–403 (1976)
Ben Amar, M., Goriely, A.: Growth and instability in elastic tissues. J. Mech. Phys. Solids 53, 2284–2319 (2005)
Bilby, B.A., Bullough, R., Smith, E.: Continuous distributions of dislocations: a new application of the methods of non-Riemannian geometry. Proc. R. Soc. Lond. A 231(1185), 263–273 (1955)
Camacho, C., Neto, A.L.: Geom. Theory Foliations. Springer, Berlin (2013)
do Carmo, M.: Riemannian Geometry. Mathematics: Theory & Applications. Birkhäuser, Boston (1992); ISBN 1584883553
Eckart, C.: The thermodynamics of irreversible processes. 4. The theory of elasticity and anelasticity. Phys. Rev. 73(4), 373–382 (1948)
Epstein, M.: Kinetics of boundary growth. Mech. Res. Commun. 37(5), 453–457 (2010)
Epstein, M., Maugin, G.A.: Thermomechanics of volumetric growth in uniform bodies. Int. J. Plast. 16, 951–978 (2000)
Ganghoffer, J.-F.: Mechanics and thermodynamics of surface growth viewed as moving discontinuities. Mech. Res. Commun. 38(5), 372–377 (2011)
Garikipati, K., Arruda, E.M., Grosh, K., Narayanan, H., Calve, S.: A continuum treatment of growth in biological tissue: the coupling of mass transport and mechanics. J. Mech. Phys. Solids 52(7), 1595–1625 (2004)
Golgoon, A., Sadik, S., Yavari, A.: Circumferentially-symmetric finite eigenstrains in incompressible isotropic nonlinear elastic wedges. Int. J. Non-Linear Mech. 84, 116–129 (2016)
Golovnev, A.: ADM Analysis and Massive Gravity. arXiv:1302.0687 (2013)
Goriely, A.: The Mathematics and Mechanics of Biological Growth, vol. 45. Springer, Berlin (2017)
Kadish, J., Barber, J., Washabaugh, P.: Stresses in rotating spheres grown by accretion. Int. J. Solids Struct. 42(20), 5322–5334 (2005)
Klarbring, A., Olsson, T., Stalhand, J.: Theory of residual stresses with application to an arterial geometry. Arch. Mech. 59(4–5), 341–364 (2007)
Kondo, K.: Geometry of Elastic Deformation and Incompatibility. In: Kondo, K (Ed.) Memoirs of the Unifying Study of the Basic Problems in Engineering Science by Means of Geometry, volume 1, Division C, pp. 5–17. Gakujutsu Bunken Fukyo-Kai (1955a)
Kondo, K.: Non-Riemannian geometry of imperfect crystals from a macroscopic viewpoint. In: Kondo, K. (Ed.) Memoirs of the Unifying Study of the Basic Problems in Engineering Science by Means of Geometry, volume 1, Division D-I, pp. 6–17. Gakujutsu Bunken Fukyo-Kai (1955b)
Lychev, S., Kostin, G., Koifman, K., Lycheva, T.: Modeling and optimization of layer-by-layer structures. In: Journal of Physics: Conference Series, vol. 1009, p. 012014. IOP Publishing (2018)
Manzhirov, A.V., Lychev, S.A.: Mathematical modeling of additive manufacturing technologies. In: Proceedings of the World Congress on Engineering, volume 2 (2014)
Marsden, J., Hughes, T.: Mathematical Foundations of Elasticity. Dover, New York (1983)
Metlov, V.: On the accretion of inhomogeneous viscoelastic bodies under finite deformations. J. Appl. Math. Mech. 49(4), 490–498 (1985)
Naumov, V.E.: Mechanics of growing deformable solids: a review. J. Eng. Mech. 120(2), 207–220 (1994)
Ong, J.J., O’Reilly, O.M.: On the equations of motion for rigid bodies with surface growth. Int. J. Eng. Sci. 42(19), 2159–2174 (2004)
Ozakin, A., Yavari, A.: A geometric theory of thermal stresses. J. Math. Phys. 51, 032902 (2010)
Poincaré, H.: Science and Hypothesis. Science Press, Berlin (1905)
Rodriguez, E.K., Hoger, A., McCulloch, A.D.: Stress-dependent finite growth in soft elastic tissues. J. Biomech. 27, 455–467 (1994)
Sadik, S., Yavari, A.: Geometric nonlinear thermoelasticity and the time evolution of thermal stresses. Math. Mech. Solids 22(7), 1546–1587 (2016)
Sadik, S., Yavari, A.: On the origins of the idea of the multiplicative decomposition of the deformation gradient. Math. Mech. Solids 22, 771–772 (2017)
Sadik, S., Angoshtari, A., Goriely, A., Yavari, A.: A geometric theory of nonlinear morphoelastic shells. J. Nonlinear Sci. 26(4), 929–978 (2016)
Schwerdtfeger, K., Sato, M., Tacke, K.-H.: Stress formation in solidifying bodies. Solidification in a round continuous casting mold. Metall. Mater. Trans. B 29(5), 1057–1068 (1998)
Segev, R.: On smoothly growing bodies and the Eshelby tensor. Meccanica 31(5), 507–518 (1996)
Skalak, R., Farrow, D., Hoger, A.: Kinematics of surface growth. J. Math. Biol. 35(8), 869–907 (1997)
Sozio, F., Yavari, A.: Nonlinear mechanics of surface growth for cylindrical and spherical elastic bodies. J. Mech. Phys. Solids 98, 12–48 (2017)
Sozio, F., Sadik, S., Shojaei, M.F., Yavari, A. : Nonlinear mechanics of thermoelastic surface growth. In: preparation (2019)
Spivak, M.: A Comprehensive Introduction to Differential Geometry, vol. II, 3rd edn. Publish or Perish, Inc, New York (1999)
Takamizawa, K.: Stress-free configuration of a thick-walled cylindrical model of the artery—an application of Riemann geometry to the biomechanics of soft tissues. J. Appl. Mech. 58, 840–842 (1991)
Takamizawa, K., Matsuda, T.: Kinematics for bodies undergoing residual stress and its applications to the left ventricle. J. Appl. Mech. 57, 321–329 (1990)
Tomassetti, G., Cohen, T., Abeyaratne, R.: Steady accretion of an elastic body on a hard spherical surface and the notion of a four-dimensional reference space. J. Mech. Phys. Solids 96, 333–352 (2016)
Wang, C.-C.: Universal solutions for incompressible laminated bodies. Arch. Ration. Mech. Anal. 29(3), 161–192 (1968)
Yavari, A.: A geometric theory of growth mechanics. J. Nonlinear Sci. 20(6), 781–830 (2010)
Yavari, A.: Compatibility equations of nonlinear elasticity for non-simply-connected bodies. Arch. Ration. Mech. Anal. 209(1), 237–253 (2013)
Yavari, A., Goriely, A.: Riemann–Cartan geometry of nonlinear dislocation mechanics. Arch. Ration. Mech. Anal. 205(1), 59–118 (2012a)
Yavari, A., Goriely, A.: Weyl geometry and the nonlinear mechanics of distributed point defects. Proc. R. Soc. A 468, 3902–3922 (2012b)
Yavari, A., Goriely, A.: Riemann–Cartan geometry of nonlinear disclination mechanics. Math. Mech. Solids 18(1), 91–102 (2013a)
Yavari, A., Goriely, A.: Nonlinear elastic inclusions in isotropic solids. Proc. R. Soc. A 469, 20130415 (2013b)
Yavari, A., Goriely, A.: The geometry of discombinations and its applications to semi-inverse problems in anelasticity. Proc. R. Soc. A 470, 20140403 (2014)
Yavari, A., Goriely, A.: The twist-fit problem: finite torsional and shear eigenstrains in nonlinear elastic solids. Proc. R. Soc. A 471, 20150596 (2015)
Yavari, A., Marsden, J.E., Ortiz, M.: On spatial and material covariant balance laws in elasticity. J. Math. Phys. 47, 042903 (2006)
Zurlo, G., Truskinovsky, L.: Printing non-Euclidean solids. Phys. Rev. Lett. 119(4), 048001 (2017)
Zurlo, G., Truskinovsky, L.: Inelastic surface growth. Mech. Res. Commun. 93, 174–179 (2018)
Acknowledgements
This research was partially supported by NSF—Grant Nos. CMMI 1130856 and ARO W911NF-16-1-0064.
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by Dr. Alain Goriely.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
Appendices
We tersely review some elements of Riemannian geometry, geometry of surfaces and of foliations, and the geometric theory of nonlinear elasticity and anelasticity. For more detailed discussions, see Marsden and Hughes (1983), Camacho and Neto (2013), Yavari (2010), Yavari and Goriely (2012a).
Riemannian Geometry
For a smooth n-manifold \(\mathcal {M}\), the tangent space to \(\mathcal {M}\) at a point \(p \in \mathcal {M}\) is denoted \(T_p\mathcal {M}\). A smooth vector field \(\mathbf {W}\) on \(\mathcal {M}\) assigns a vector \(\mathbf {W}_p\) to every \(p\in \mathcal {M}\) and \(p\mapsto \mathbf {W}_p\in T_p\mathcal {M}\) varies smoothly. A 1-form at \(p \in \mathcal {M}\) is a linear map \(\varvec{\lambda }: T_{p}\mathcal {M} \rightarrow \mathbb {R}\). In a local coordinate chart \(\{X^A\}\) for \(\mathcal {M}\), \(\langle \varvec{\lambda },\mathbf {U} \rangle = \lambda _K U^K\), where \(\mathbf {U} \in T_{p} \mathcal {M}\). The vector space of 1-form at \(p \in \mathcal {M}\) is denoted with \(T^*_{p}\mathcal {M}\). A smooth differential 1-form assigns a 1-form \(\varvec{\lambda }_p\) to every \(p\in \mathcal {M}\) and \(\varvec{\lambda }_p\in T^*_p\mathcal {M}\) varies smoothly. A type \(r\atopwithdelims ()s\)-tensor at \(p \in \mathcal {M}\) is a multilinear map
In a local chart one has
An \(r\atopwithdelims ()s\)-tensor field is a smooth map \(p \mapsto \mathbf {T}_p\). A Riemannian manifold is a pair \((\mathcal {M},\mathbf {G})\) where \(\mathbf {G}\), the metric tensor field, is a field of positive-definite \(0\atopwithdelims ()2\)-tensors. If \(\mathbf {U}\) and \(\mathbf {W}\) are vector fields on \(\mathcal {M}\), then \(p \mapsto \mathbf {G}_p(\mathbf {U}_p,\mathbf {W}_p) =: \langle \!\langle \mathbf {U}_p,\mathbf {W}_p \rangle \!\rangle _{\mathbf {G}_p}\) is a smooth function. A metric tensor can be used to raise and lower indices. Given a 1-form \(\varvec{\lambda }\), we indicate with \(\varvec{\lambda }^{\sharp }\) the vector with components \(G^{IJ}\lambda _J\) (the \(G^{IJ}\)’s being the components of the inverse metric, i.e., \(G_{IJ}G^{JK}=\delta ^K_I\)), while given a vector \({\mathbf {U}}\), we indicate with \({\mathbf {U}}^{\flat }\) the 1-form with components \(G_{IJ} U^J\).
Suppose \(\mathcal {N}\) is another n-manifold and \(\psi :\mathcal {M}\rightarrow \mathcal {N}\) is a smooth and invertible map. If \(\mathbf {W}\) is a vector field on \(\mathcal {M}\), then \(\psi _*\mathbf {W} = T\psi \cdot \mathbf {W} \circ \psi ^{-1}\) is a vector field on \(\psi (\mathcal {M})\) called the push-forward of \(\mathbf {W}\) by \(\psi \). Similarly, if \(\mathbf {w}\) is a vector field on \(\psi (\mathcal {M}) \subset \mathcal {N}\), then \(\psi ^*\mathbf {w}=T(\psi ^{-1}) \cdot \mathbf {w} \circ \psi \) is a vector field on \(\mathcal {M}\) that is called the pull-back of \(\mathbf {w}\) by \(\psi \). Let us denote \(\mathbf {F}=T\psi \). In the local charts \(\{X^I\}\) and \(\{x^i\}\) for \(\mathcal {M}\) and \(\mathcal {N}\), respectively, \(\mathbf {F}\) (a two-point tensor) has the following representation (when \(\psi \) is a deformation mapping, \(\mathbf {F}\) is the so-called deformation gradient of nonlinear elasticity)
where \(\left\{ \frac{\partial }{\partial X^I}\right\} \) is a basis for \(T_p\mathcal {M}\) and \(\{\mathrm{d}X^I\}\) is a basis for \(T^*_{\psi (p)}\psi (\mathcal {M})\), the co-tangent space, i.e., the dual space of \(T_{\psi (p)}\psi (\mathcal {M})\), or the space of co-vectors (1-forms). The push-forward and pull-back of vectors have the following coordinate representations \((\psi _*\mathbf {W})^a=F^a{}_A W^A\), and \((\psi ^*\mathbf {w})^A=(F^{-1})^A{}_a w^a\). The push-forward and pull-back of 1-forms are defined as \((\psi _*\varvec{\Lambda })_a=(F^{-1})^A{}_a \Lambda _A\), and \((\psi ^*\varvec{\lambda })_A=F^a{}_A \lambda _a\). We sometimes indicate them with \(({\mathbf{F}}^{-1})^{{\star }} {\varvec{\Lambda }}\) and \({\mathbf {F}}^{\star }\varvec{\lambda }\), where \({\mathbf F}^{\star }\) is the dual of \(\mathbf {F}\) and is defined as
The push-forward and pull-back of an \(r\atopwithdelims ()s\)-tensor field are given by
Suppose \((\mathcal {M},\mathbf {G})\) and \((\mathcal {N},\mathbf {g})\) are Riemannian manifolds and \(\psi :\mathcal {M}\rightarrow \mathcal {N}\) is a diffeomorphism (smooth map with smooth inverse). Push-forward of the metric \(\mathbf {G}\) is a metric on \(\psi (\mathcal {M})\subset \mathcal {N}\), which is denoted by \(\psi _*\mathbf {G}\) and is defined as
In components, \((\psi _*\mathbf {G})_{ij} = (F^{-1})^I{}_i (F^{-1})^J{}_j G_{IJ}\). Similarly, pull-back of the metric \(\mathbf {g}\) is a metric in \(\psi ^{-1}(\mathcal {N})\subset \mathcal {M}\), which is denoted by \(\psi ^*\mathbf {g}\) and is defined as
In components
If \(\mathbf {g}=\psi _*\mathbf {G}\), or equivalently, \(\mathbf {G}=\psi ^*\mathbf {g}\), \(\psi \) is called an isometry and the Riemannian manifolds \((\mathcal {M},\mathbf {G})\) and \((\mathcal {N},\mathbf {g})\) are isometric. Note that an isometry preserves distances.
A linear (affine) connection on a manifold \(\mathcal {B}\) is an operation \(\nabla :\mathcal {X}(\mathcal {B})\times \mathcal {X}(\mathcal {B})\rightarrow \mathcal {X}(\mathcal {B})\), where \(\mathcal {X}(\mathcal {B})\) is the set of vector fields on \(\mathcal {B}\), such that \(\forall ~\mathbf {X},\mathbf {Y},\mathbf {X}_1,\mathbf {X}_2,\mathbf {Y}_1,\mathbf {Y}_2\in \mathcal {X}(\mathcal {B}),\forall ~f,f_1,f_2\in C^{\infty }(\mathcal {B}),\forall ~a_1,a_2\in \mathbb {R}\):
\(\nabla _{\mathbf {X}}\mathbf {Y}\) is called the covariant derivative of \(\mathbf {Y}\) along \(\mathbf {X}\). In a local chart \(\{X^I\}\), \(\nabla _{\partial _I}\partial _J=\Gamma ^K{}_{IJ}\partial _K\), where \(\Gamma ^K{}_{IJ}\) are Christoffel symbols of the connection and \(\partial _K=\frac{\partial }{\partial x^K}\) are natural bases for the tangent space corresponding to a coordinate chart \(\{x^A\}\). In components the covariant derivative of a tensor field reads
while for a field of 1-forms one has
The previous relations can be generalized to tensors as
A linear connection is said to be compatible with a metric \(\mathbf {G}\) of the manifold if
where \(\left\langle \!\left\langle .,. \right\rangle \!\right\rangle _{\mathbf {G}}\) is the inner product induced by the metric \(\mathbf {G}\). It can be easily shown that \(\nabla \) is compatible with \(\mathbf {G}\) if and only if \(\nabla \mathbf {G}=\mathbf {0}\). A linear connection is said to be symmetric if \(\nabla _{\mathbf {U}}\mathbf {W}-\nabla _{\mathbf {W}}\mathbf {U}-[\mathbf {U},\mathbf {W}]=\mathbf {0}\), with \([\mathbf {U},\mathbf {W}]\) indicating the Lie brackets of \(\mathbf {U}\) and \(\mathbf {W}\), i.e., \(([\mathbf {U},\mathbf {W}])^I = W^I,_J U^J - U^I,_J W^J\). The symmetric connection that is compatible with the metric is called the Levi–Civita connection and its Christoffel coefficients read
The Riemann curvature \(\varvec{\mathcal {R}}\) associated with \((\mathcal {M},\nabla )\) is a \(1\atopwithdelims ()3\)-tensor defined as
where \(\varvec{\mathcal {R}}(\mathbf {X},\mathbf {Y})\mathbf {Z}\) stands for the contraction \(R^I{}_{JLM} X^LY^MZ^J\). In a local coordinate chart \(\{X^A\}\), the components of the Riemman curvature tensor read
The Ricci curvature \(\mathbf {R}\) is defined as \(R_{IJ}=\mathcal {R}^H{}_{IHJ}\) and is a symmetric \(0\atopwithdelims ()2\)-tensor. The scalar curvature R is defined as \(R=R_{HK}G^{HK}\). In dimension three only six components of \(\varvec{\mathcal {R}}\) are independent and the Ricci curvature fully determines the Riemannian curvature. In dimension two \(\varvec{\mathcal {R}}\) contains only one independent component so it is fully determined by the scalar curvature. A metric whose Levi–Civita connection has zero curvature is said to be flat and is locally isometric to \(\mathbb {R}^n\) (see the different versions of the Test Case Theorem in Spivak 1999).
Geometry of Surfaces
For our purposes, a surface is a two-dimensional submanifold \(\Omega \) of a three-dimensional manifold \(\mathcal {M}\) (for details see do Carmo 1992). The ambient manifold \(\mathcal {M}\) is endowed with a metric \(\mathbf {G}\) that, in general, is not flat. The surface \(\Omega \) inherits a metric \(\tilde{\mathbf {G}}\) — the first fundamental form — from \(\mathbf {G}\), such that
On an open set one can define the unit vector \(\mathbf {N}\) normal to \(\Omega \), i.e., a vector field such that i) \(\mathbf {G}(\mathbf {Y},\mathbf {N})=0\) for each tangent vector \(\mathbf {Y}\), ii) \(\mathbf {G}(\mathbf {N},\mathbf {N})=1\). It is globally defined only when \(\Omega \) is orientable. We also define the associated 1-form \(\mathbf {N}^{\flat }\) such that \(\langle \mathbf {N}^{\flat } ,\mathbf {X} \rangle = 0\) for any \(\mathbf {X}\in T\Omega \), and \(\langle \mathbf {N}^{\flat } , \mathbf {N} \rangle = 1\), which can be obtained by lowering the index of \(\mathbf {N}\), i.e., \(N_I = G_{IJ} N^J\).
The two Levi–Civita connections \(\nabla \) on \((\mathcal {M},\mathbf {G})\), and \(\tilde{\nabla }\) on \((\Omega ,\tilde{\mathbf {G}})\) satisfy the Gauss formula
This means that \({\tilde{\nabla }}\) is the tangent projection of \(\nabla \). The second fundamental form \(\mathbf {K}\) is a \(0\atopwithdelims ()2\)-tensor defined as
Then, Eq. (B.2) can be rewritten as
It can be easily shown that \(\mathbf {K}\) is well defined and symmetric. Moreover, since \(\nabla _{\mathbf {Y}}\left( \mathbf {G}(\mathbf {Z},\mathbf {N}) \right) =\nabla _{\mathbf {Y}}\mathbf {0}=\mathbf {0}\) for any pair \(\mathbf {Y}, \mathbf {Z}\in T\Omega \), one has
which is known as the Weingarten formula, and in short it reads \(\mathbf {K} = -\nabla {\mathbf {N}}^{\flat }\).
An adapted chart \(\Xi \) on \(\mathcal {U}\subset \mathcal {M}\) has the property \(\Xi (\mathcal {U}\cap \Omega )= V \times \{0\}\) with \(V\subset \mathbb {R}^2\). In other words, the surface is locally given by \(\Xi ^3=0\) and \((\Xi ^1,\Xi ^2)\) are coordinate functions on \(\Omega \cap \mathcal {U}\). We use letters from A to G to denote indices that span \(\{1,2\}\) (layer indices), and letters from H to Z for indices that span \(\{1,2,3\}\) (3D indices). The components of the second fundamental form can now be obtained using the Weingarten formula:
where all quantities are referred to an adapted chart.

Foliation charts. Left: sketch of two overlapping local charts in 2D. Right: sketch of a foliation chart in a 3-manifold
The Riemann curvature tensor \(\varvec{\mathcal {R}}\) on \((\mathcal {M},\mathbf {G})\) was introduced in Appendix A. One can define in the same way the curvature tensor \(\tilde{\varvec{\mathcal {R}}}\) for \((\Omega ,\tilde{\mathbf {G}})\). In components one has
The curvature tensor has 16 components but, as mentioned earlier, only one is independent. Hence, it can be expressed by the scalar curvature R, or by the Gaussian curvature \(g=\det (\tilde{G}^{AC}K_{CB})\). It can be shown that \(R=2g\) and \(g\det \tilde{\mathbf {G}}=\frac{1}{2}R\det \tilde{\mathbf {G}}=R_{1212}\). The Guass equation relates the tangent part of \(\varvec{\mathcal {R}}\) to \(\tilde{\varvec{\mathcal {R}}}\) and \(\mathbf {K}\). In components, it reads
When the ambient space \((\mathcal {M},\mathbf {G})\) is Euclidean the Gauss equation provides an expression for the curvature of the surface, viz. \(\tilde{R}_{ABCD} = K_{AC} K_{BD} - K_{AD} K_{BC}\). The Codazzi–Mainardi equations relate \(\varvec{\mathcal {R}}\) to \(\tilde{\nabla } \mathbf {K}\). In components, they are given by
When the ambient space \((\mathcal {M},\mathbf {G})\) is Euclidean the Codazzi–Mainardi equations enforce the symmetry of the tensor \(\tilde{\nabla }_A K_{BC}\) with respect to all permutations.
Geometry of Foliations
Let \(\mathcal {M}\) be an n-dimensional manifold. An \((n-1)\)-foliation (or foliation of codimension 1) is an atlas of charts \((\mathcal {U}_a,\Xi _a)\) (a in some index set \(\mathcal {I}\)) such that \(\Xi _a(\mathcal {U}_a)= V_a \times I_a\) with \(V_a \subset \mathbb {R}^{n-1}\) and \(I_a \subset \mathbb {R}\) open sets (see Fig. 20). For further details see Camacho and Neto (2013). The coordinate charts \(\Xi _a\) are called the foliation charts. When this property holds, one obtains a partition of \(\mathcal {M}\) as a collection \(\{\Omega _t \}_{t\in \mathbb {R}}\) of embedded submanifolds of dimension two — the leaves of the foliation. In particular, a Riemannian material manifold \((\mathcal {M},\mathbf {G})\) is partitioned into \((n-1)\)-dimensional Riemannian submanifolds \((\Omega _{\tau },\tilde{\mathbf {G}}_{\tau })\) with \(\tau \in \mathbb {R}\). The metric \(\tilde{\mathbf {G}}_{\tau }\) on the layer \(\Omega _{\tau }\) is inherited from \(\mathbf {G}\), i.e., it is defined as
and constitutes the first fundamental form of the layer.
Rights and permissions
About this article

Cite this article
Sozio, F., Yavari, A. Nonlinear mechanics of accretion. J Nonlinear Sci 29, 1813–1863 (2019). https://doi.org/10.1007/s00332-019-09531-w
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00332-019-09531-w