
Abstract
Background
Telerobotic surgery is ideally suited for remote applications in which the instrument control console is stationed separately from the end-effectors at the patient’s bedside. However, if the distance between the console and the patient is great enough, a lag effect or latency between end-effector manipulation and the depicted image leads to alterations in movement patterns. The purpose of this study was to determine the effect of visual delay on surgical task performance.
Methods
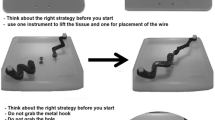
At an endoscopic skill station, an analogue delay device was interposed between the surgical field and monitor to delay the transmission of visual information, thus mimicking the distance effect of data transmission. Three surgeons with similar laparoscopic experience participated in the laparoscopic knot tying portion of the study, and seven residents participated in the accuracy and dexterity tasks. The time to complete a single throw was recorded in seconds after adding consecutively increasingly time delay in 50 ms increments. Similar time delay increments were added for the accuracy and dexterity tasks, which involved passing a needle through two adjacent circles and passing a small cylinder through a larger one to reproduce two-handed coordination and spatial resolution. Data were presented as the median time to complete each task.
Results
For all three tasks, an incremental increase in time delay was associated with a significant (p < 0.001) increase in the time to complete the task. For dexterity, a statistically significant (p ≤ 0.05) delay was identified at 0.25 s of delay from control values without delay. A move-and-wait strategy was gradually adopted up to 0.4 s of visual delay.
Conclusions
Compensation for visually delayed image perception occurs on several levels. Initial adaptations include slower end-effector manipulation; late adaptive changes include a move-and-wait strategy. Increased time to perform surgical maneuvers as well as diminished accuracy, diminished dexterity, and increasing fatigue represent additional performance encumbrances evoked by visual time delay. The nuances of both human and digital compensatory mechanisms for visual time delay must be defined and enhanced to maximize the potential for telerobotic surgical applications.



Similar content being viewed by others


Reference
M Anvari (2004) ArticleTitleRobot-assisted remote telepresence surgery Semin Laparosc Surg 11 123–128 Occurrence Handle15254651
G Ballantyne F Moll (2003) ArticleTitleThe da Vinci telerobotic surgical system: the virtual operative field and telepresence surgery Surg Clin North Am 83 1293–1304 Occurrence Handle14712866
D Birkett (2002) ArticleTitleRobotics Surg Endosc 16 1257–1258 Occurrence Handle1:STN:280:DC%2BD38vot12kuw%3D%3D Occurrence Handle12269291
T Krummel (1998) ArticleTitleSurgical simulation and virtual reality: the coming revolution Ann Surg 228 635–637 Occurrence Handle1:STN:280:DyaK1M%2FkvFGntQ%3D%3D Occurrence Handle9833801
J Marescaux J Leroy F Rubino M Smith M Vix M Simone D Mutter (2001) ArticleTitleTransatlantic robot-assisted telesurgery Nature Med 413 379–380 Occurrence Handle1:CAS:528:DC%2BD3MXntl2htbs%3D
R Satava (1998) ArticleTitleTransitioning to the future J Am Coll Surg 186 691–692 Occurrence Handle1:STN:280:DyaK1c3ptl2nug%3D%3D Occurrence Handle9632159
R Satava (1999) ArticleTitleEmerging technologies for surgery in the 21st century Arch Surg 134 1197–1202 Occurrence Handle1:STN:280:DC%2BD3c%2Fit1Gmuw%3D%3D Occurrence Handle10555633
Y Wang D Uecker Y Wang (1998) ArticleTitleA new framework for vision-enabled and robotically assisted minimally invasive surgery Comput Med Imag Graphics 22 429–437 Occurrence Handle1:STN:280:DyaK1M7ps1GhtA%3D%3D
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Kim, T., Zimmerman, P.M., Wade, M.J. et al. The effect of delayed visual feedback on telerobotic surgery. Surg Endosc 19, 683–686 (2005). https://doi.org/10.1007/s00464-004-8926-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00464-004-8926-6