
Abstract
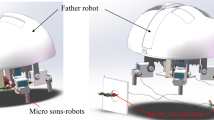
Amphibious micro-robots are being developed for complicated missions in limited spaces found in complex underwater environments. Therefore, compact structures able to perform multiple functions are required. The robots must have high velocities, long cruising times, and large load capacities. It is difficult to meet all these requirements using a conventional underwater micro-robot, so we previously proposed an amphibious spherical father–son robot system that includes several micro-robots as son robots and an amphibious spherical robot as a father robot. Our father robot was designed to carry and power the son robots. This paper discusses improvements to the structure and mechanism of the father robot, which was designed to have a spherical body with four legs. Based on recent experiments in different environments, we have improved the father robot by adding four passive wheels, and we have redesigned its structure by means of three-dimensional printing technology, resulting in greatly improved velocity and stability. Moreover, due to the complexity and uncertainty of many underwater environments, it is essential for the father robot to have adequate structural strength. We analyzed the movement mechanisms and structural strength using finite element analysis to obtain the deformation and equivalent stress distributions of the improved robot. The results provide support for further analysis of the structural strength and optimal design of our amphibious spherical father robot.



























Similar content being viewed by others


References
Abdulsadda A, Tan X (2012) An artificial lateral line system using IPMC sensor arrays. Int J Smart Nano Mater 3(3):226–242
Behkam B, Sitti M (2006) Design methodology for biomimetic propulsion of miniature swimming robots. J Dyn Syst Meas Control 128(1):36–43
Brunetto P, Fortuna L, Graziani S, Strazzeri S (2008) A model of ionic polymer-metal composite actuators in underwater operations. Smart Mater Struct 17(2):1–12. Art ID 025029
Chen W, Dong Y, Zhu Q, Li B (2010) Finite element analysis of three-dimensional robot tactile sensors based on PVDF. Chin J Sens Actuators 23(3):336–340
Flynn C, Taberner A, Nielsen P (2011) Mechanical characterisation of in vivo human skin using a 3D force-sensitive micro-robot and finite element analysis. Biomech Model Mechanobiol 10(1):27–38
Guo S, Shi L, Xiao N, Asaka K (2012a) A biomimetic underwater microrobot with multifunctional locomotion. Robot Auton Syst 60(12):1472–1483
Guo S, Shi L, Mao S, Li M (2012b) Design and kinematic analysis of an amphibious spherical robot. In: Proceedings of 2012 IEEE international conference on mechatronics and automation. IEEE, Chengdu, 5–8 Aug 2012, pp 2214–2219
Ha NS, Goo NS (2010) Propulsion modeling and analysis of a biomimetic swimmer. J Bionic Eng 7(3):259–266
Hama T, Asakawa M, Fuchizawa S, Makinouchi A (2003) Analysis of hydrostatic tube bulging with cylindrical die using static explicit FEM. Mater Trans 44(5):940–945
He Y, Guo S, Shi L (2014) 3D Printing technology-based an Amphibious Spherical Underwater Robot. In: Proceedings of 2014 IEEE international conference on mechatronics and automation. IEEE, Tianjin, 3–6 Aug 2014, pp 1382–1387
Heo S, Wiguna T, Park HC, Goo NS (2007) Effect of an artificial caudal fin on the performance of a biomimetic fish robot propelled by piezoelectric actuators. J Bionic Eng 4(3):151–158
Li Y, Guo S, Yue C (2014) “Preliminary concept and kinematics simulation of a novel spherical underwater robot”. Proceedings of 2014 IEEE International Conference on Mechatronics and Automation, Tianjin, 3–6 Aug 2014, pp 1907–1912
Lin X, Guo S (2012) Development of a spherical underwater robot equipped with multiple vectored water-jet-based thrusters. J Intell Rob Syst 67(3–4):307–321
Lin X, Guo S, Tanaka K, Hata S (2010) Development and evaluation of a vectored water-jet-based spherical underwater vehicle. INFORMATION: Int Interdiscip J 13(6):1985–1998
Liu W, Jia X, Wang F, Jia Z (2010) An in-pipe wireless swimming micro-robot driven by giant magnetostrictive thin film. Sens Actuators A 160(1–2):101–108
Mori M, Hirose S (2006) Locomotion of 3D snake-like robots-shifting and rolling control of active cord mechanism ACM-R3. J Robot Mechatron 18(5):521–528
Najem J, Sarles SA, Akle B, Leo DJ (2012) Biomimetic jellyfish-inspired underwater vehicle actuated by ionic polymer metal composite actuators. Smart Mater Struct 21(9):1–11. Art ID 094026
Pan Y, Guo M, Li W (2011) Mechanical property analysis of automatic teller machines based on ANSYS. J Mach Des 28(1):60–63
Shi L, Guo S, Asaka K (2011) Development of a new jellyfish-type underwater microrobot. Int J Robot Autom 26(2):229–241
Shi L, Guo S, Asaka K (2012a) A novel jellyfish- and butterfly-inspired underwater micro robot with pectoral fins. Int J Robot Autom 27(3):276–286
Shi L, Guo S, Li M, Mao S, Xiao N, Gao B, Song Z, Asaka K (2012b) A novel soft biomimetic microrobot with two motion attitudes. Sensors 12(12):16732–16758
Shi L, Guo S, Mao S, Li M, Asaka K (2013a) Development of a lobster-inspired underwater microrobot. Int J Adv Robot Syst 10(44):1–15. doi:10.5772/54868
Shi L, Guo S, Mao S, Yue C, Li M, Asaka K (2013b) Development of an amphibious turtle-inspired spherical mother robot. J Bionic Eng 10(4):446–455
Shi L, He Y, Guo S (2013c) IPMC Actuator-based a Movable Robotic Venus Flytrap. In: Proceedings of 2013 ICME international conference on complex medical engineering. IEEE, Beijing, 25–28 May 2013, pp 375–378
Shi L, He Y, Guo S (2013d) Skating motion analysis of the amphibious quadruped mother robot. In: Proceedings of 2013 IEEE international conference on mechatronics and automation. IEEE, Takamatsu, 4–7 Aug 2013, pp 1749–1754
Villanueva A, Joshi K, Blottman J, Priya S (2010) A bio-inspired shape memory alloy composite (BISMAC) actuator. Smart Mater Struct 19(2):1–17(025013)
Wang Z, Hang G, Li J, Wang Y, Xiao K (2008) A micro-robot fish with embedded SMA wire actuated flexible biomimetic fin. Sens Actuators A 144(2):354–360
Wang W, Chao G, Niu J (2011) Design and finite-element analysis of robotic fish sealing tank. Lubr Eng 36(12):80–84
Zhang Z, Wang S, Tan M (2004) 3-D locomotion control for a biomimetic robot fish. J Control Theory Appl 2(2):169–174
Zhang W, Guo S, Asaka K (2006) A new type of hybrid fish-like micro robot. Int J Autom Comput 3(4):358–365
Acknowledgments
This work was supported by the Excellent young scholars Research Fund of Beijing Institute of Technology and the Basic Research Fund of the Beijing Institute of Technology (No. 3160012211405). This research project was also partly supported by National Natural Science Foundation of China (61375094), Key Research Program of the Natural Science Foundation of Tian-jin (13JCZDJC26200) and National High Tech. Research and Development Program of China (No. 2015AA043202).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
He, Y., Shi, L., Guo, S. et al. Preliminary mechanical analysis of an improved amphibious spherical father robot. Microsyst Technol 22, 2051–2066 (2016). https://doi.org/10.1007/s00542-015-2504-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00542-015-2504-9