
Abstract
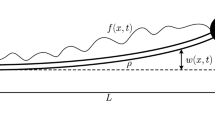
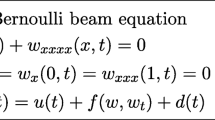
We consider boundary stabilization for a one-dimensional Euler-Bernoulli equation with boundary moment control and disturbance. The active disturbance rejection control (ADRC) and sliding mode control (SMC) approaches are adopted in investigation. By the ADRC approach, a state feedback disturbance estimator with time-varying gain is designed to estimate the disturbance. It is shown that the closed-loop system is asymptotically stable by canceling the disturbance in the feedback loop with its online estimation. In the second part, the SMC is applied to reject the disturbance. The well-posedness of the closed-loop system via SMC is proven, and the monotonicity of the “reaching condition” is presented without differentiating the sliding mode function which may not always exist for the weak solution. The numerical experiments are presented to illustrate the convergence and the peaking value reduction caused by the constant high gain. In addition, the control energies are compared numerically for two approaches.




Similar content being viewed by others

References
Curtain RF. The Salamon-Weiss class of well-posed infinite dimensional linear systems: a survey. IMA J Math Control Inform 1997;14:207–223.
Guo BZ, Yu R. The Riesz basis property of discrete operators and application to a Euler-Bernoulli beam equation with linear feedback control. IMA J Math Control Inform 2001;18:241–251.
Guo BZ, Luo YH. Controllability and stability of a second-order hyperbolic system with collocated sensor/actuator. Syst Control Lett 2002;46:45–65.
Guo BZ, Jin FF. The active disturbance rejection and sliding mode control approach to the stabilization of Euler-Bernoulli beam equation with boundary input disturbance. Automatica 2013;49:2911–2918.
Guo BZ, Zhao ZL. On the convergence of extended state observer for nonlinear systems with uncertainty. Syst Control Lett 2011;60:420–430.
Guo BZ, Liu JJ. Sliding mode control and active disturbance rejection control to the stabilization of one-dimensional Schröinger equation subject to boundary control matched disturbance. Internat J Robust Nonlinear Control. in press.
Guo BZ, Jin FF. Sliding mode and active disturbance rejection control to stabilization of one-dimensional anti-stable wave equations subject to disturbance in boundary input. IEEE Trans Automat Control 2013;58:1269–1274.
Pazy A. Semigroups of linear operators and applications to partial differential equations. New York: Springer; 1983.
Polyanin AD, Zaitsev VF. Handbook of exact solutions for ordinary differential equations, 2nd ed. Boca Raton: Chapman & Hall.
Weiss G. Admissibility of unbounded control operators. SIAM J Control Optim 1989;27:527–545.
Weiss G, Staffans O, Tucsnak M. Well-posed linear systems-a survey with emphasis on conservative systems. Int J Appl Math Comput Sci 2001;11:7–33.
Acknowledgments
This work was funded by the Deanship of Scientific Research (DSR), King Abdulaziz University, under grant no. HiCi/1434/130-4. The authors, therefore, acknowledge the technical and financial support of KAU.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Guo, BZ., Zhou, HC., AL-Fhaid, A.S. et al. Stabilization of Euler-Bernoulli Beam Equation with Boundary Moment Control and Disturbance by Active Disturbance Rejection Control and Sliding Mode Control Approaches. J Dyn Control Syst 20, 539–558 (2014). https://doi.org/10.1007/s10883-014-9241-8
Received:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10883-014-9241-8