
Abstract
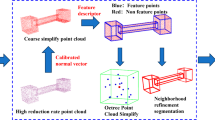
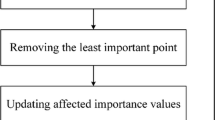
To address the problem of feature points missing and surface holes after 3D reconstruction. A method of filling holes after extracting feature points of point cloud data is proposed. In this paper, the method of extracting feature points by multi-discriminant parameters is used to simplify the point cloud. The original shape features are retained while the data are simplified. Then, the initial triangulation of the point cloud is carried out. The resulting triangular mesh is least squared to get a relatively normal mesh, and finally the curvature of the surface is adjusted and optimized. The experimental results show that the simplification rate corresponding to improving the efficiency and retaining the original features is different for the point cloud data of different magnitude. The simplification rate of tens of thousands point cloud data is 70-80%, and that of hundreds of thousands of point cloud data is 40%. It also shows that the combination of feature point extraction and hole repair not only improves the efficiency of the repair process, but also retains the original features of the data.




















Similar content being viewed by others
References
Bin XU, Zhong-Ke LI, Song DH (2014) Hole repairing algorithm in triangular mesh surface based on support vector machines and laplacian. Computer Engineering & Design
Dang YZ, Yao J, Gao Y (2017) Relaxed two points projection method for solving the multiple-sets split equality problem. Num Alg 78(1):1–13
Davis J, Marschner SR, Garr M, Levoy M (2002) Filling holes in complex surfaces using volumetric diffusion. In: Proceedings. First international symposium on 3D data processing visualization and transmission, IEEE, pp 428–441
Gai S, Da F, Zeng L, Huang Y (2019) Research on a hole filling algorithm of a point cloud based on structure from motion. JOSA A 36(2):A39–A46
Girshick R, Donahue J, Darrell T, Malik J (2014) Rich feature hierarchies for accurate object detection and semantic segmentation. In: Proceedings of the IEEE conference on computer vision and pattern recognition, pp 580–587
Han H, Han X, Sun F, Huang C (2015) Point cloud simplification with preserved edge based on normal vector. Optik-International Journal for Light and Electron Optics 126(19):2157–2162
Huang XM, Chen H, Liu WQ (2019) Study of laser point clouds simplification algorithm based on dynamic grid k-nearest neighbors searching. Control & Decision 35(12):2986–2992
Hui C, Wen C, Chenggang C, Yunfeng H (2020) Research on point cloud repair based on multi-parameter extraction in digital power plant. In: 2020 5th International conference on power and renewable energy (ICPRE), pp 387–390
Jing BH, Hai Fy, Zhong KL (2017) Research of the reconstruction method for the image feature of non-rigid 3d point cloud. Multimed Tools Appl 76 (19):19591–19603
Jing Z, Zhou M, Geng G (2018) Repair methods for complex hole of three-dimensional model based on variational level set method. Application Research of Computers
Lee PF, Huang CP (2011) The dso feature based point cloud simplification. In: 2011 Eighth international conference computer graphics, imaging and visualization, IEEE, pp 1–6
Li YW, Geng GH, Xiao-Ran W (2017) Hole-filling algorithm based on poisson equation. Comput Eng 31(06):512–518
Liu S, Liang J, Dong B (2018) Rapid mesh hole filling in body model. Hsi An Chiao Tung Ta Hsueh/journal of Xian Jiaotong University 52 (8):37–42
Liu T, Zheng XU, Sha CM, Zhao JT (2009) Curvature estimation of scattered-point cloud data based on bounding box method. Science Technology & Engineering
Liu Z, Wang Y, Bai L, Miao Y (2016) Detail-preserving hole-filling for complex 3d models. Journal of Computer-Aided Design & Computer Graphics
Mukherjee A, Das SD, Ghosh J, Chowdhury AS, Saha SK (2020) Semantic segmentation of surface from lidar point cloud. Multimed Tools Appl, 1–22
Nie E, Li J, Zhang R, Cao L, Sun L, Liu H (2017) Three dimensional point cloud hole repairing strategy for binocular stereo reconstruction. In: 2017 IEEE International conference on robotics and biomimetics, ROBIO, IEEE, pp 2456–2461
Nooruddin FS, Turk G (2003) Simplification and repair of polygonal modes using volumetric techniques. IEEE Transviscomputgraphics 9(2):191–205
Qian B, Lan Q (2017) Repairing tunnel 3d point cloud hole. Engineering of Surveying & Mapping
Qian GP, Tong RF, Peng W, Dong JX (2008) Mesh reconstruction of noisy point cloud based on intrinsic property. Journal of Zhejiang University
Qiu-xiang Y, Xiao-qing Y, Jian D (2016) Point cloud simplification algorithm based on hausdorff distance and segmentation. Computer Engineering and Design
Shi BQ, Liang J, Liu Q (2011) Adaptive simplification of point cloud using k-means clustering. Comput Aided Des 43(8):910–922
Su T, Wang W, Lv Z, Wu W, Li X (2016) Rapid delaunay triangulation for randomly distributed point cloud data using adaptive hilbert curve. Computers & Graphics 54:65–74
Wang C, Chen H, Kong Y, Meng F (2014) Applications of rbf neural network in mending the 3d incomplete point clouds of different excavator bucket teeth. Mechanical Science & Technology for Aerospace Engineering
Wang CX, Zhang Y, Liang L, Wang YH (2018) Liang liang,wang yanhui. application of the extreme learning machine algorithm repair the hole of the scattered point cloud. Modern Manufact Eng 458(11):44–49
Wang W (2018) A novel rapid point-cloud surface reconstruction algorithm for laser imaging radar. Multimed Tools Appl 78(7):8737–8749
Wu X, Chen W (2014) A scattered point set hole-filling method based on boundary extension and convergence. In: Proceeding of the 11th world congress on intelligent control and automation, pp 5329–5334
Xie QR, Geng GH (2013) Research on hole-filling algorithm for 3d models. Application Research of Computers
Yang B, Liang F, Huang R (2017) Progress, challenges and perspectives of 3d lidar point cloud processing. Acta Geodaetica Et Cartographica Sinica
Yuan XC, Wu LS, Chen HW (2015) Feature preserving point cloud simplification. Opt Precision Eng 23(9):2666–2676
Zhang Q, Lin S, Bai J, Wang D (2017) Hole repairing in point cloud based on backtracking bidirectional advancing front method. Journal of Test & Measurement Technology
Zhangwen C, Feipeng D (2013) 3d point cloud simplification algorithm based on fuzzy entropy iteration. Acta Optica Sinica 33(8):0815001
Acknowledgements
This work was supported by National Natural Science Foundation oc China (Grant No.51705304), Natrual Science Foundation of Shanghai(Grant No.20ZR1421300).
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Chen, H., Cui, W. Holes filling of scattered point cloud based on simplification. Multimed Tools Appl 81, 14641–14661 (2022). https://doi.org/10.1007/s11042-021-11019-3
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11042-021-11019-3