
Abstract
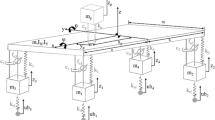
The global spread of Electric Bicycles (EBs) is increasing more and more. In addition to supporting the ease of cycling, the electric energy available can also be used for innovative braking control systems. The project BikeSafe picks up on this idea and aims at developing an active Braking Dynamics Assistance system (BDA) for EBs equipped with hydraulic brakes. A simulation model taking into account all substantial braking dynamics influences is necessary for the model-based design of the BDA. This paper presents a Multi-Body Model (MBM) of a front suspension bicycle and a passive rider. This MBM has been experimentally validated for in-plane braking dynamics using road tests. It has real-time ability and can therefore be used as a virtual representation of the plant for the model-based design process of the BDA.












Similar content being viewed by others
References
Eisenberger, D.: Zahlen-Daten-Fakten zum Deutschen E-Bike-Markt. German Bicycle Industry Association (ZIV), Press Release, Berlin (2015)
Maier, O., Pfeiffer, M., Wrede, J.: Development of a braking dynamics assistance systems for electric bicycles: design, implementation, and evaluation of road tests. Trans. Mechatron. 21(3), 1671–1679 (2015). doi:10.1109/TMECH.2015.2505186
VDI 2206. Design methodology for mechatronic systems. VDI 2206:2004-06 (2004)
Cossalter, V., Lot, R., Massaro, M.: An advanced multibody code for handling and stability analysis of motorcycles. Meccanica 46(5), 943–958 (2010). doi:10.1007/s11012-010-9351-7
Sharp, R.S.: The stability and control of motorcycles. J. Mech. Eng. Sci. 13(5), 16–329 (1971). doi:10.1243/JMES_JOUR_1971_013_051_02
Sharp, R.S.: The dynamics of single track vehicles. Veh. Syst. Dyn. 5(1–2), 67–77 (1976). doi:10.1080/00423117508968406
Sharp, R.S., Limebeer, D.J.N.: A motorcycle model for stability and control analysis. Multibody Syst. Dyn. 6(2), 123–142 (2001). doi:10.1023/A:1017508214101
Sharp, R.S., Evangelou, S., Limebeer, D.J.N.: Advances in the modelling of motorcycle dynamics. Multibody Syst. Dyn. 12(3), 251–283 (2004). doi:10.1023/B:MUBO.0000049195.60868.a2
Koenen, C.: The dynamic behaviour of a motorcycle when running straight ahead and when cornering. Ph.D. dissertation, Dept. Mechanical Engineering, Delft University of Technology, Delft, Netherlands (1983)
Ruijs, P.A.J., Pacejka, H.B.: Recent research in lateral dynamics of motorcycles. Veh. Syst. Dyn. 15(1), 467–480 (1986). doi:10.1080/00423118608969155
Meijaard, J.P., Papadopoulos, J.M., Schwab, A.L.: Linearized dynamics equations for the balance and steer of a bicycle: a benchmark and review. Proc. R. Soc. A 436, 1955–1982 (2007). doi:10.1098/rspa.2007.1857
Kooijman, J.D.G., Meijaard, J.P., Papadopoulos, J.M., Ruina, A., Schwab, A.L.: A bicycle can be self-stable without gyroscopic or caster effects. Science 332(6027), 339–342 (2011). doi:10.1126/science.1201959
Kooijman, J.D.G., Schwab, A.L., Meijaard, J.P.: Experimental validation of a model of an uncontrolled bicycle. Multibody Syst. Dyn. 19(1), 115–132 (2007). doi:10.1007/s11044-007-9050-x
Åström, K.J., Lunze, J.: Why are we able to ride a bicycle? Automatisierungstechnik 49(10), 427–435 (2009). doi:10.1524/auto.2001.49.10.427
Åström, K.J., Klein, R.E., Lennartsson, A.: Bicycle dynamics and control. IEEE Control Syst. 25(4), 26–47 (2005). doi:10.1109/MCS.2005.1499389
Franke, G., Suhr, W., Rieß, F.: An advanced model of bicycle dynamics. Eur. J. Phys. 11(2), 116–121 (2000). doi:10.1088/0143-0807/11/2/010
Hand, R.S.: Comparisons and stability analysis of linearized equations of motion for a basic bicycle model. M.S. thesis, Cornell University, NY (1988)
Cerone, V., Andreo, D., Larsson, M., Regruto, D.: Stabilization of a riderless bicycle a linear-parameter-varying approach. IEEE Control Syst. 30(5), 23–32 (2010). doi:10.1109/MCS.2010.937745
Wu, C.-C.: Static and dynamic analyses of mountain bikes and their riders. Ph.D. dissertation, University of Glasgow, Glasgow (2012)
Breuer, J.: Untersuchung des Einflusses geometrischer Parameter auf das Fahrverhalten von Einspurfahrzeugen. M.S. thesis, Dept. Mechanical Engineering and Mechatronic, University of Applied Sciences Aachen, Germany (2013)
Waechter, M., Riess, F., Zacharias, N.: A multibody model for the simulation of bicycle suspension systems. Veh. Syst. Dyn. 37(1), 3–28 (2002). doi:10.1076/VESD.37.1.3.3539
Redfield, R.: Large motion mountain biking dynamics. Veh. Syst. Dyn. 43(12), 845–865 (2005). doi:10.1080/00423110412331289844
Moore, J.K.: Human control of a bicycle. Ph.D. dissertation, Dept. Mechanical and Aerospace Engineering, University of California, Davis, CA (2012)
Moore, J.K., Hubbard, M., Schwab, A.L., Kooijman, J.D.G., Peterson, D.L.: Statistics of bicycle rider motion. Proc. Eng. 2(2), 2937–2942 (2010). doi:10.1016/j.proeng.2010.04.091
Moore, J.K., Kooijman, J.D.G., Schwab, A.L., Hubbard, M.: Rider motion identification during normal bicycling by means of principal component analysis. Multibody Syst. Dyn. 25, 225–244 (2011). doi:10.1007/s11044-010-9225-8
Wang, E.L., Hull, M.L.: A model for determining rider induced energy losses in bicycle suspension systems. Veh. Syst. Dyn. 25(3), 223–246 (1996). doi:10.1080/00423119608968966
Wang, E.L., Hull, M.L.: A dynamic system model of an off-road cyclist. J. Biomech. Eng. 119(3), 248–253 (1997). doi:10.1115/1.2796088
Besselink, I.J.M.: Vehicle dynamics analysis using SimMechanics and TNO Delft-tyre. In: The MathWorks International Automotive Conference, IAC 2006, Stuttgart, Germany (2006)
Maier, O., Györfi, B., Wrede, J., Arnold, T., Moia, A.: In-depth analysis on bicycle hydraulic disc brakes. Mech. Syst. Signal Process. 95, 310–323 (2017). doi:10.1016/j.ymssp.2017.03.044
Schiebler, T.H., Korf, H.W.: Anatomie Histologie, Entwicklungsgeschichte, makroskopische und mikroskopische Anatomie, Topographie (2007). ISBN 978-3-7985-1770-7
Schramm, D., Hiller, M., Bardini, R.: Vehicle Dynamics: Modeling and Simulation, pp. 43–73. Springer, Berlin (2014). doi:10.1007/978-3-540-36045-2
ISO 8855. Road vehicles—vehicle dynamics and road-holding ability. ISO 8855:2011 (2011)
Pauwelussen, J.P.: Full vehicle ABS braking using the SWIFT rigid ring tyre model. IFAC Control Eng. Pract., CEP 11(2), 199–207 (2003)
Jansen, S.T.H., Zegelaar, P.W.A., Pacejka, H.B.: The influence of in-plane tyre dynamics on ABS braking of a quarter vehicle model. Veh. Syst. Dyn. 32(2–3), 249–561 (1999). doi:10.1076/VESD.32.2.249.2086
Jaiswal, M., Mavros, G., Rahnejat, H., King, P.D.: Influence of tyre transience on anti-lock braking. Proc. Inst. Mech. Eng., Proc., Part K, J. Multi-Body Dyn. 224(1), 1–17 (2009)
Popov, V.L.: Kontaktmechanik und Reibung, pp. 309–333. Springer, Berlin (2010). ISBN 978-3-642-13302-2
Bellersheim, R., et al.: Tabellenbuch Fahrradtechnik, p. 300. Haan-Gruiten, Europa-Lehrmittel (2014). ISBN 978-3808523336
Artmann, U., et al.: Fachkunde Fahrradtechnik, p. 384. Haan-Gruiten, Europa-Lehrmittel (2014). ISBN 978-3808522950
Maier, O., Györfi, B., Kubatschek, A., Pfeiffer, M., Wrede, J.: Simulationsgestützte Bewertung kritischer Einflussgrößen auf das Vorderradblockieren bei Elektrofahrrädern. In: ASIM/GI-Fachgruppen Workshop, Stralsund, Germany, June 18–19, 2015 pp. 257–268 (2015). ISBN 978-3-9813334-9-7
ISO 4210. Safety requirements for bicycles, part 6: frame and fork test methods. ISO 4210-6:2014 (2014)
Doria, A., et al.: Identification of the mechanical properties of bicycle tyres for modelling of bicycle dynamics. Veh. Syst. Dyn. 51(3), 405–420 (2013). doi:10.1080/00423114.2012.754048
Bulsink, V., Doria, A., et al.: The effect of tyre and rider properties on the stability of a bicycle. Adv. Mech. Eng. 7(12), 1–19 (2015). doi:10.1177/1687814015622596
Dressel, A.E.: Measuring and modeling the mechanical properties of bicycle tires. Ph.D. dissertation, The University of Wisconsin-Milwaukee, Milwaukee (2013)
Dressel, A.E.: Measuring dynamic properties of bicycle tires. In: Symposium on Dynamics and Control of Single Track Vehicles, Proceedings of Bicycle and Motorcycle Dynamics, Delft (2010)
Dressel, A.E., Rahman, A.: Measuring sideslip and camber characteristics of bicycle tires. Veh. Syst. Dyn. 50(8), 1365–1378 (2011). doi:10.1080/00423114.2011.615408
Maier, O., Hillenbrand, S., Wrede, J., Freund, A., Gauterin, F.: Vertical and longitudinal characteristics of a bicycle tire. Tire Sci. Technol. (accepted for publication)
Burckhardt, M.: Der Reifen als Regelgröße. In: Fahrwerktechnik: Radschlupf-Regelsysteme, pp. 15–62. Vogel, Würzburg (1993)
National Aeronautics and Space Administration. International space station flight. Crew Integration Standard, NASA-STD-3000/T (1999)
Kłodowski, A., Rantalainen, T., Heinonen, A., Sievänen, H., Mikkola, A.: The use of the flexible multibody approach for lower body skeletal loading analysis. Proc. IUTAM 2, 93–100 (2011). doi:10.1016/j.piutam.2011.04.010
Cossalter, V.: Rectilinear motion of motorcycle. In: Motorcycle Dynamics, 2nd edn., pp. 73–104 (2006). ISBN 978-1-4303-0861-4
Maier, O., Pfeiffer, M., Wrede, J.: Bremsdynamisches Assistenzsystem für elektrifizierte Fahrräder: Aufbau und Validierung eines Umgebungsmodells als Grundlage der modellbasierten Entwicklung. In: VDI Tagung Mechatronik, Dortmund, Germany, March 12–13, 2015, pp. 271–276 (2015). ISBN 978-3-00-048814-6
ISO 9000. Quality management systems—fundamentals and vocabulary. ISO 9000:2015 (2015)
Bauer, K., Schick, S., Wagner, A., Zhou, K., Peldschus, S., Malczyk, A.: Untersuchungen zur Schutzwirkung des Fahrradhelms. Research report No. 32, German Insurance Association, Berlin (2015)
Maier, O., Scharpf, S., Pfeiffer, M., Wrede, J.: Conditions of nose-over and front wheel lockup on electric bicycles. In: 17th Int. Conf. on Research and Education in Mechatronics, Compiègne, France, June 15–17 (2016). doi:10.1109/MECATRONICS.2016.7547145
Bachmann, B.: Wechselwirkungen im Prozeß der Reibung zwischen Reifen und Fahrbahn, pp. 45–106. VDI Verlag No. 12/360, Düsseldorf (1998)
Acknowledgements
The authors would like to thank the ministry of education and research in Germany (BMBF) for sponsoring the project (FKZ 03FH063PX3). Furthermore, the authors thank all academic and industrial partners for supporting BikeSafe.
Author information
Authors and Affiliations
Corresponding author
Additional information
Sponsored by the German Ministry of Education and Research (BMBF)
Appendix
Appendix
Rights and permissions
About this article

Cite this article
Maier, O., Györfi, B., Wrede, J. et al. Design and validation of a multi-body model of a front suspension bicycle and a passive rider for braking dynamics investigations. Multibody Syst Dyn 42, 19–45 (2018). https://doi.org/10.1007/s11044-017-9576-5
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11044-017-9576-5