
Abstract
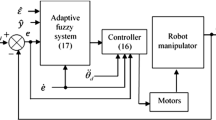
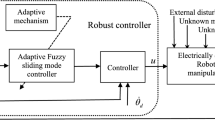
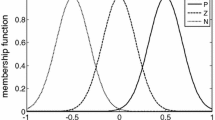
This paper presents a novel robust decentralized control of electrically driven robot manipulators by adaptive fuzzy estimation and compensation of uncertainty. The proposed control employs voltage control strategy, which is simpler and more efficient than the conventional strategy, the so-called torque control strategy, due to being free from manipulator dynamics. It is verified that the proposed adaptive fuzzy system can model the uncertainty as a nonlinear function of the joint position error and its time derivative. The adaptive fuzzy system has an advantage that does not employ all system states to estimate the uncertainty. The stability analysis, performance evaluation, and simulation results are presented to verify the effectiveness of the method. A comparison between the proposed Nonlinear Adaptive Fuzzy Control (NAFC) and a Robust Nonlinear Control (RNC) is presented. Both control approaches are robust with a very good tracking performance. The NAFC is superior to the RNC in the face of smooth uncertainty. In contrast, the RNC is superior to the NAFC in the face of sudden changes in uncertainty. The case study is an articulated manipulator driven by permanent magnet dc motors.











Similar content being viewed by others
References
Qu, Z., Dawson, D.M.: Robust Tracking Control of Robot Manipulators. IEEE Press, New York (1996)
Abdallah, C., Dawson, D., Dorato, P., Jamshidi, M.: Survey of robust control for rigid robots. IEEE Control Syst. Mag. 11, 24–30 (1991)
Cheah, C.C., Hirano, M., Kawamura, S., Arimoto, S.: Approximate Jacobian control for robots with uncertain kinematics and dynamics. IEEE J. Robot. Autom. 19(4), 692–702 (2003)
Fateh, M.M., Soltanpour, M.R.: Robust task-space control of robot manipulators under imperfect transformation of control space. Int. J. Innov. Comput. Inf. Control 5(11A), 3949–3960 (2009)
Fateh, M.M.: Robust control of electrical manipulators by joint acceleration. Int. J. Innov. Comput. Inf. Control 6(12), 5501–5510 (2010)
Corless, M.J.: Control of uncertain nonlinear systems. J. Dyn. Syst. Meas. Control 115(2B), 362–372 (1993)
Sage, H.G., De Mathelin, M.F., Ostertag, E.: Robust control of robot manipulators: a survey. Int. J. Control 72(16), 1498–1522 (1999)
Fateh, M.M.: Proper uncertainty bound parameter to robust control of electrical manipulators using nominal model. Nonlinear Dyn. 61(4), 655–666 (2010). doi:10.1007/s11071-010-9677-7
Youcef-Toumi, K., Shortlidge, C.: Control of robot manipulators using time delay. In: Proc. IEEE Int. Conf. on Robotics and Automation, Sacramento, CA, pp. 2391–2398 (1991)
Talole, S.E., Phadke, S.B.: Model following sliding mode control based on uncertainty and disturbance estimator. J. Dyn. Syst. Meas. Control 130, 1–5 (2008)
Fateh, M.M.: On the voltage-based control of robot manipulators. Int. J. Control. Autom. Syst. 6(5), 702–712 (2008)
Fateh, M.M.: Robust voltage control of electrical manipulators in task-space. Int. J. Innov. Comput. Inf. Control 6(6), 2691–2700 (2010)
Fateh, M.M.: Nonlinear control of electrical flexible-joint robots. Nonlinear Dyn. 67(4), 2549–2559 (2012). doi:10.1007/s11071-011-0167-3
Fateh, M.M.: Robust control of flexible-joint robots using voltage control strategy. Nonlinear Dyn. 67, 1525–1537 (2012). doi:10.1007/s11071-011-0086-3
Wang, L.X.: A Course in Fuzzy Systems and Control. Prentice-Hall, New York (1996)
Lim, C.M., Hiyama, T.: Application of fuzzy logic control to a manipulator. IEEE Trans. Robot. Autom. 1(5), 688–691 (1991)
Ham, C., Qu, Z., Johnson, R.: Robust fuzzy control for robot manipulators. IEE Proc., Control Theory Appl. 147(2), 212–216 (2000)
Kim, E.: Output feedback tracking control of robot manipulator with model uncertainty via adaptive fuzzy logic. IEEE Trans. Fuzzy Syst. 12(3), 368–376 (2004)
Hwang, J.P., Kim, E.: Robust tracking control of an electrically driven robot: adaptive fuzzy logic approach. IEEE Trans. Fuzzy Syst. 14(2), 232–247 (2006)
Fateh, M.M.: Robust fuzzy control of electrical manipulators. J. Intell. Robot. Syst. 60(3–4), 415–434 (2010). doi:10.1007/s10846-010-9430-y
Fateh, M.M.: Fuzzy task-space control of a welding robot. Int. J. Robot. Autom. 25(4), 372–378 (2010). doi:10.2316/Journal.206.2010.4.206-3437
Fateh, M.M., Shahrabi Frahani, S., Khatamianfar, A.: Task space control of a welding robot using a fuzzy coordinator. Int. J. Control. Autom. Syst. 8(3), 574–582 (2010). doi:10.1007/s12555-010-0310-9
Wang, L.X.: Adaptive Fuzzy Systems and Control: Design and Stability Analysis. Prentice-Hall, New York (1994)
Hsu, F.Y., Fu, L.C.: Adaptive robust fuzzy control for robot manipulators. In: Proc. IEEE Conf. on Robotics and Automation, San Diego, CA, pp. 649–654 (1994)
Sun, F.C., Sun, Z.Q., Feng, G.: An adaptive fuzzy controller based on sliding mode for robot manipulators. IEEE Trans. Syst. Man Cybern., Part B, Cybern. 29(4), 661–667 (1999)
Hwang, J.P., Kim, E.: Robust tracking control of an electrically driven robot: adaptive fuzzy logic approach. IEEE Trans. Fuzzy Syst. 14(2), 232–247 (2006)
Corless, M., Leitmann, G.: Continuous state feedback guaranteeing uniform ultimate boundedness for uncertain dynamics systems. IEEE Trans. Autom. Control 26, 1139–1144 (1981)
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Fateh, M.M., Khorashadizadeh, S. Robust control of electrically driven robots by adaptive fuzzy estimation of uncertainty. Nonlinear Dyn 69, 1465–1477 (2012). https://doi.org/10.1007/s11071-012-0362-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-012-0362-x