
Abstract
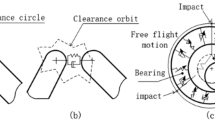
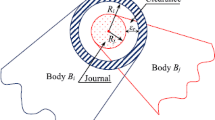
In this paper, the behavior of planar rigid-body mechanical systems due to the dynamic interaction of multiple revolute clearance joints is numerically studied. One revolute clearance joint in a multibody mechanical system is characterized by three motions which are: the continuous contact, the free-flight, and the impact motion modes. Therefore, a mechanical system with n-number of revolute clearance joints will be characterized by 3n motions. A slider-crank mechanism is used as a demonstrative example to study the nine simultaneous motion modes at two revolute clearance joints together with their effects on the dynamic performance of the system. The normal and the frictional forces in the revolute clearance joints are respectively modeled using the Lankarani–Nikravesh contact-force and LuGre friction models. The developed computational algorithm is implemented as a MATLAB code and is found to capture the dynamic behavior of the mechanism due to the motions in the revolute clearance joints. This study has shown that clearance joints in a multibody mechanical system have a strong dynamic interaction. The motion mode in one revolute clearance joint will determine the motion mode in the other clearance joints, and this will consequently affect the dynamic behavior of the system. Therefore, in order to capture accurately the dynamic behavior of a multi-body system, all the joints in it should be modeled as clearance joints.









Similar content being viewed by others
References
Flores, P.: Dynamic Analysis of Mechanical Systems with Imperfect Kinematic Joints. Ph.D. Dissertation, University of Minho, Guimarães (2004)
Erkaya, S., Uzmay, I.: Experimental investigation of joint clearance effects on the dynamics of a slider-crank mechanism. Multibody Syst. Dyn. 24, 81–102 (2010)
Erkaya, S., Uzmay, I.: Investigation on effect of joint clearance on dynamics of four-bar mechanism. Nonlinear Dyn. 58, 179–198 (2009)
Megahed, S.M., Haroun, A.F.: Analysis of the dynamic behavioral performance of mechanical systems with multi-clearance joints. J. Comput. Nonlinear Dyn. 7, 1–11 (2011)
Flores, P.: A parametric study on the dynamic response of planar multibody systems with multiple clearance joints. Nonlinear Dyn. 4, 633–653 (2010)
Canudas de Wit, C., Olsson, H., Astrom, K.J., Lischinsky, P.: A new model for control of systems with friction. IEEE Trans. Autom. Control 40(3), 419–425 (1995)
Muvengei, O., Kihiu, J., Ikua, B.: Dynamic analysis of planar multi-body systems with LuGre friction at differently located revolute clearance joints. Multibody Syst. Dyn. 28(4), 369–393 (2012)
Lankarani, H.M., Nikravesh, P.E.: Continuous contact force models for impact analysis in multibody systems. Nonlinear Dyn. 194–207 (1994)
Schwab, A.L., Meijaard, J.P., Meijers, P.: A comparison of revolute joint clearance models in the dynamic analysis of rigid and elastic mechanical systems. Mech. Mach. Theory 37, 895–913 (2002)
Flores, P., Ambrosio, J.: On the contact detection for contact-impact analysis in multibody systems. Multibody Syst. Dyn. 24, 103–122 (2010)
Muvengei, O., Kihiu, J., Ikua, B.: Dynamic analysis of multi-body mechanical systems with imperfect kinematic joints: a literature survey and review. Sustain. Res. Innov. Proc. 3, 61–76 (2011)
Flores, P., Ambrosio, J.: Revolute joints with clearance in multibody systems. Comput. Struct. 82, 1359–1369 (2004)
Flores, P., Ambrosio, J., Claro, J.C.P., Lankarani, H.M., Koshy, C.S.: A study on dynamics of mechanical systems including joints with clearance and lubrication. Mech. Mach. Theory 41, 247–261 (2006)
Flores, P., Ambrosio, J., Claro, J.C.P., Lankarani, H.M.: Influence of the contat-impact force model on the dynamic response of multi-body systems. Proc. Inst. Mech. Eng., Proc., Part K, J. Multi-Body Dyn. 220, 21–34 (2006)
Muvengei, O., Kihiu, J., Ikua, B.: Effects of input speed on the dynamic response of planar multi-body systems with differently located frictionless revolute clearance joints. JSME Int. J., Mech. Mater. Eng. 4, 234–243 (2010)
Muvengei, O., Kihiu, J., Ikua, B.: Numerical study of parametric effects on the dynamic response of planar multi-body systems with differently located frictionless revolute clearance joints. Mech. Mach. Theory 53, 30–49 (2012)
Flores, P., Koshy, C., Lankarani, H., Ambrosio, J., Claro, J.: Numerical and experimental investigation on multibody systems with revolute clearance joints. Nonlinear Dyn. 65(4), 383–398 (2011)
Cheriyan, S.K.: Chracterization of Mechanical Systems with Real Joints and Flexible Links. Ph.D. Dissertation, Wichita State University, Wichita (2006)
Khemili, I., Romdhane, L.: Dynamic analysis of a flexible slider-crank mechanism with clearance. Eur. J. Mech. A, Solids 27, 882–898 (2008)
Ravn, P.: A continuous analysis method for planar multibody systems with joint clearance. Multibody Syst. Dyn. 2, 1–24 (1998)
Ravn, P., Shivaswamy, S., Alshaer, B.J., Lankarani, H.M.: Joint clearances with lubricated long bearings in multibody mechanical systems. J. Mech. Des. 122, 484–488 (2000)
Chunmei, J., Yang, Q., Ling, F., Ling, Z.: The nonlinear dynamic behavior of an elastic linkage mechanism with clearances. J. Sound Vib. 249(2), 213–226 (2002)
Mukras, S., Kim, N.H., Mauntler, N.A., Schmitz, T.L., Sawyer, W.G.: Analysis of planar multibody systems with revolute joint wear. Wear 268(5–6), 643–652 (2010)
Glocker, C.: Set-Valued Force Laws: Dynamics of Non Smooth Systems. Lectures Notes in Applied and Computational Mechanics. Springer, Berlin (2001)
Ambrosio, J.C.: Impact of rigid and flexible multibody systems: deformation description and contact models. In: Schiehlen, E.W., Valásek, M. (eds.) Virtual Nonlinear Multibody Systems, vol. II, pp. 15–33 (2002)
Flores, P., Ambrosio, J., Claro, J.P.: Dynamic analysis for planar multibody mechanical systems with lubricated joints. Multibody Syst. Dyn. 12, 47–74 (2004)
Jia, X., Jin, D., Ji, L., Zhang, J.: Investigation on the dynamic performance of the tripod-ball sliding joint with clearance in a crank-slider mechanism. Part 1. Theoretical and experimental results. J. Sound Vib. 252(5), 919–933 (2002)
Bing, S., Ye, J.: Dynamic analysis of the reheat-stop-valve mechanism with revolute clearance joint in consideration of thermal effect. Mech. Mach. Theory 43(12), 1625–1638 (2008)
Flores, P.: Modeling and simulation of wear in revolute clearance joints in multibody systems. Mech. Mach. Theory 44(6), 1211–1222 (2009)
Flores, P., Ambrosio, J., Claro, J.C.P., Lankarani, H.M., Koshy, C.S.: Lubricated revolute joints in rigid multibody systems. Nonlinear Dyn. 56(3), 277–295 (2009)
Tian, Q., Zhang, Y., Chen, L., Flores, P.: Dynamics of spatial flexible multibody systems with clearance and lubricated spherical joints. Comput. Struct. 87, 913–929 (2009)
Nikravesh, P.E.: Computer-Aided Analysis of Mechanical Systems. Prentice Hall, Englewood Cliffs (1988)
Shabana, A.: A. Computational Dynamics. Wiley, New York (1994)
Baumgarte, J.: Stabilization of constraints and integrals of motion in dynamical systems. Comput. Methods Appl. Mech. Eng. 1, 1–16 (1972)
Kim, J.K., Chung, I.S., Lee, B.H.: Determination of the feedback coefficients for the constraint violation stabilization method. Proc. Inst. Mech. Eng., Part C, J. Mech. Eng. Sci. 204, 233–242 (1990)
Acknowledgements
This work is part of the ongoing Ph.D. research titled, “Dynamic Analysis of Flexible Multi-Body Mechanical Systems with Multiple Imperfect Kinematic Joints.” The authors gratefully acknowledge the financial and logistical support of Jomo Kenyatta University of Agriculture and Technology (JKUAT) and the German Academic Exchange Service (DAAD) in carrying out this study.
The advice of Professor Parviz Nikravesh of the University of Arizona during the development of the MATLAB code for kinematic and dynamic analysis of a general planar multi-body mechanical system is highly appreciated.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Muvengei, O., Kihiu, J. & Ikua, B. Dynamic analysis of planar rigid-body mechanical systems with two-clearance revolute joints. Nonlinear Dyn 73, 259–273 (2013). https://doi.org/10.1007/s11071-013-0782-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-013-0782-2