
Abstract
One of the challenges in reservoir management is determining the fracture density (FVDC) in reservoir rock. Given the high cost of coring operations and image logs, the ability to predict FVDC from various petrophysical input variables using a supervised learning basis calibrated to the standard well is extremely useful. In this study, a novel machine learning approach is developed to predict FVDC from 12-input variable well-log based on feature selection. To predict the FVDC, combination of two networks of multiple extreme learning machines (MELM) and multi-layer perceptron (MLP) hybrid algorithm with a combination of genetic algorithm (GA) and particle swarm optimizer (PSO) has been used. We use a novel MELM-PSO/GA combination that has never been used before, and the best comparison result between MELM-PSO-related models with performance test data is RMSE = 0.0047 1/m; R2 = 0.9931. According to the performance accuracy analysis, the models are MLP-PSO < MLP-GA < MELM-GA < MELM-PSO. This method can be used in other fields, but it must be recalibrated with at least one well. Furthermore, the developed method provides insights for the use of machine learning to reduce errors and avoid data overfitting in order to create the best possible prediction performance for FVDC prediction.
Similar content being viewed by others

Introduction
Naturally fractured reservoirs (NFR) are one of the most economically important reservoirs globally, which has received much attention from petroleum engineers and geoscientists (Ja’fari et al. 2012; Nelson 1985; Ouenes 2000). Sarkheil et al (2009) argued that natural fractures in reservoir rock structure are one of the reasons for high gas production from gas fields. The importance of NFR results from the developing relationship between porosity and permeability, as well as the relationship between fracture and high recovery factors in these reservoirs (Allan and Sun 2003; Nelson 2001; Wang and Sharma 2019; Warpinski et al. 2009).
Natural fractures are observed in many of the world’s reservoirs, and this factor is significant in the oil and gas industry because it directly contributes to fluid flow. Fractures are a critical factor in reservoir development and management, and several methods for detecting them have been developed, including the use of petrophysical logs, mud loss history, core descriptions, well tests, and seismic data (Aguilera 2008; Dutta et al. 2007; Gale et al. 2007; Ja’fari et al. 2012; Suboyin et al. 2020; Thompson 2000; Tokhmechi et al. 2009). The reservoir’s fracture is extremely complex, and it is greatly influenced by geological conditions such as (Sarkheil et al. 2013):
-
Under lithostatic
-
Fluid pressure
-
Tectonic
-
Thermal and other geological stresses such as uplifting
-
Volcanoes
-
Salt intrusion
Many direct and in-direct methods have been identified and used for FVDC detection from the past to the present (Ja’fari et al. 2012). The disadvantages of these methods are that they are very expensive and time-consuming, as well as having some practical limitations for example image log (based on FMI log) and coring (Ja'fari et al. 2012; Tokhmechi et al. 2009). In recent years, many researchers have used low-cost and time-consuming artificial intelligence methods to predict FVDC in oil and gas reservoir formations (Zazoun 2013). Boadu (1998) predicted FVDC using the artificial neural network (ANN) method using 3050 random data, including compressional wave (P-wave) and shear wave (S-wave). The results show that this algorithm fits the data properly and has high-performance accuracy (Boadu 1998). Ince (2004) successfully applied an ANN technique to 40 data records involving a two-parameter algorithm including CTODC (mm) (critical crack tip opening displacement) and KICS (Mpa \(\sqrt{m}\)) (critical stress intensity factor based on two-parameter model) to predict concrete fracturing. Later, Sarkheil et al. (2009) used the developed nonlinear modeling and forecasting system to evaluate and predict the reservoir fracture network using 17 wells from the Tabnak hydrocarbon field in Iran associated with image loges (FMI) and core measurements. The correlations between observed and predicted failure densities for training, validation, and test data were 0.92, 0.86, and 0.88, respectively, according to their findings. The aforementioned Sarkheil et al (2009) study provides fundamental information for scientific research in these areas as well as the assessment of hydrocarbon production. Jafari et al. (2012) used data from 15 wells in Iran's Marun field, including deep resistance, neutron porosity, and bulk density log data. Based on the application of adaptive neuro fuzzy inference system (ANFIS) model, they were able to predict FVDC (Ja’fari et al. 2012). One year later, Zazoun (2013) achieved acceptable results using the ANN method with six inputs: core depth, gamma ray (GR), sonic interval transit time (DT), caliper, neutron porosity (NPHI) and bulk density (RHOB), fracture density (FVDC). With an R2 value of 0.812, their four-layered ANN model using a conjugate gradient descent training algorithm provided the best fracture-density prediction performance (Zazoun 2013). Nouri-Taleghani et al (2015) used a combination of three models, multi-layer perceptron (MLP), radial basis function (RBF), and least-squares support-vector machine (LSSVM), in conjunction with the committee machine intelligent system (CMIS), to create combined models MLP-CMIS, RBF-CMIS, and LSSVM-CMIS in Marun oil field models to predict FVDC based on the six inputs variables including depth, caliper, neutron porosity (NPHI), photoelectric absorption factor (PEF), bulk density (RHOB), and deep induction log (ILD). The results of Nouri-Taleghani et al (2015) revealed that the LSSVM-CMIS hybrid model outperformed the other two hybrid models (R2 = 0.8950 and RMSE = 0.102) (Nouri-Taleghani et al. 2015). Three years later, Li et al (2018) presented a model for predicting FVDC using algorithm synthesis support-vector machine (SVM) with genetic algorithm (GA) based on acoustic waves input variables and data related to carbonate reservoir in the Ordos Basin (China), and they predicting a correlation coefficient of 0.7 (Li et al. 2018). In the same year, Bhattacharya and Mishra (2018) obtained absolute accuracy of 74.8% and 79.6%, using random forest (RF) and Bayesian network (BN) algorithms with GR, RHOB, and CP inputs from the Appalachian Basin formations (USA) (Bhattacharya and Mishra 2018). According to recent research, intelligent machine learning models for accurately estimating the FVDC have provided inexpensive, fast, and accurate solutions, as shown in Table 1.
Gap of knowledge and proposed novel model
Numerous techniques, such as increased fluid loss rates into fissures and fractures or complete circulation loss during drilling operations, have been introduced to identify fracture reservoirs based on accurate observations during drilling (Feng et al. 2016; Xu et al. 2019). In the mid-1980s, advances in dip meter technology and image logs enable the detection of features such as FVDC (Luthi 2001; Serra 1989; Toyobo et al. 2020). Many authors argue that they can predict fracture density (FVDC) using micro-resistivity images (FMI), and the output of this log is image loge (Zellou and Ouenes 2003). Furthermore, image logs from advanced devices such as measurement-while-drilling (MWD) during drilling operations have been able to identify and determine fractures in reservoir rocks (Khorzoughi et al. 2018; Murphy 1993; Xu et al. 2016). Prior to the image logs technology, the fracture detection operation was performed in the laboratory using coring and X-rays, or computed tomography (CT) scans on the core, which both operations (image log and coring) required a significant cost and time (AlAwad and Fattah 2017; Andersen et al. 2013; Kuramoto et al. 2008; Romano et al. 2019; Zazoun 2013; Zerrouki et al. 2014). As a result, it will be highly beneficial to employ new techniques such as hybrid machine learning in order to obtain more accurate results while saving money and time.
This study attempted to provide a novel model (MELM with PSO/GA optimizer) that minimizes RMSE based on a database of more than 3019 data points, using 12 input variables based on feature selection, which includes: bulk formation density (RHOB); density correction (DRHO); thorium/uranium ratio (TURT); caliper (CALI); shallow resistivity (HMRS); thorium (THOR); the photoelectric index (PEF); neutron porosity (NPHI); potassium (POTA); deep resistivity (HDRS); uranium/potassium ratio (UKRT); and gamma ray (GR). Furthermore, several control measures are being used to increase accuracy, reduce errors, and avoid data overfitting in order to create the best possible prediction performance for FVDC prediction, which has never been done before in the literature.
Methodology
Workflow diagram
Four hybrid machine learning algorithms with two efficient optimizers are used in this paper to predict FVDC for three wells in the large Marun oil and gas field in southwestern Iran. Figure 1 shows the applied workflow diagram for predicting the FVDC. Based on this diagram, the data collection process was first applied to the studied field data from the Asmari carbonate reservoir. The data are then sorted to describe the data variable, and maximum and minimum values for each variable are determined. After normalizing the input data (Eq. 1), the feature selection process is performed to determine a suitable combination of inputs. After determining the best combination of inputs, the input data related to the two wells are divided into three sections: test, train, and validation.
where ϶ minl and, ϶ maxl are the minimum and maximum values of the attribute \(l\) in an arrangement; \(\mathrel\backepsilon_{i}^{l}\) is the value of attribute \(l\) for data record I.

Workflow of formation FVDC prediction based on hybrid machine-learning optimizer models
One way to compare algorithms is to have a proper comparison (statistical parameters) (Hazbeh et al. 2021a) r. At this stage, a comparison is made based on statistical parameters, and after identifying the best algorithm, it is tested for development on another well.
Feature selection
One method for shortening the process and better estimating each model is to use the best features rather than all features, which increases the program's speed, efficiency, and accuracy (Farsi et al. 2021). This selection includes all of the features available for determining the best performance estimate (Jain and Zongker 1997). When the number of input variables is large, the probabilistic estimation becomes too repetitive and difficult to repeat consecutive performances. For example, if 15 attributes are available, there are as many as 2 N possible combinations (32,768) (Chandrashekar and Sahin 2014). There are numerous feature selection methods (for example, filtering, wrapping, and embedded methods), the most basic of which is the filtering method, and not every evaluated subset is optimal (John et al. 1994). Wrapping methods are more accurate and effective than other methods because they use evolutionary algorithms (e.g., genetic algorithm (GA)) to identify ineffective variables and eliminate potential properties. Variables are generated using potential solutions; each data set is then normalized, and the results are obtained using the cost function, which in this case is the root mean squared error. GA transfers high-performance solutions (minimum RMSE) to the next optimizer iteration and applies the main reader, which includes crossover, combination, and mutation, to the new iterations (Wahab et al. 2015).
Machine learning algorithms
Many researchers have conducted extensive research to determine the key factors in many areas of the oil and gas industry, including formation damage (Mohammadian and Ghorbani 2015), co2 capture (Hassanpouryouzband et al. 2019; Hassanpouryouzband et al. 2018a, b), reservoir performance (Ghorbani et al. 2017a), wellbore stability (Darvishpour et al. 2019), production (Ghorbani and Moghadasi 2014; Ghorbani et al. 2017b, 2014), rheology and filtration (Mohamadian et al. 2018), wellbore blowout (Abdali et al. 2021) and drilling fluid optimization (Mohamadian et al. 2019). Many studies in machine learning and new algorithms can aid in the solving of technical problems in many areas of the oil and gas industry (Choubineh et al. 2017; Ghorbani et al. 2020). In this study, four hybrid algorithms combine two networks of multi-extreme learning machines (MELM) and MLP using particle swarm optimization (PSO) and GA, including MELM-PSO MELM-GA, MLP-PSO, and MLP-GA.
Multi-layer perceptron
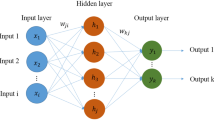
Artificial neural networks (ANNs) are one method for facilitating accurate prediction of dependent variables and complex methods and equations (Ali 1994). Because of the variety of complexities for each dependent variable, there are many different types of neural networks. The selection of attributes (i.e., the input variables to be considered), network architecture (number of layers and nodes), and the transfer of functions between layers, as well as the selection of training algorithm, are among the factors that increase the correct choice of these factors and thus increase the performance accuracy in artificial networks (Ghorbani et al. 2018; Mohamadian et al. 2021). The multi-layer perceptron (Fig. 2) is one of the most practical and adaptable neural networks for large and complex datasets (Rashidi et al. 2020). Therefore, MLP is very useful and suitable for predicting FVDC. Combining networks with different evolutionary algorithms is one way to improve performance and results in network algorithms. To improve the results, the MLP methodology employs two evolutionary genetic algorithms (GA) and one particle swarm algorithm (PSO). One of the algorithms in the train that helps the MLP algorithm in fast convergence to the optimizer is the Levenberg–Marquardt (LM) algorithm.

A schematic of MLP by showing input, hidden and output layer and nodes
Multi-layer extreme learning machine
ELM, introduced by Liang et al (2006), is one of the fastest and easiest computing networks, avoiding time-consuming repetitions during ELM network training with single hidden layers (Liang et al. 2006). The input weight/bias in this network is selected at random from a uniform distribution and is not usually adjusted through network tuning (Fig. 3) (Cheng and Xiong 2017; Huang et al. 2011; Liang et al. 2006). The output weights of the ELM are converted to a linear output layer by inverting the hidden layer, and the optimal value of the output weight is identified using root mean-squared error regression (Huang et al. 2011). This eliminates the need for duplicate backpropagation simulation, which is an essential part of MLP networks (Yeom and Kwak 2017). The use of latent multi-layer ELM (MELM) is common in complex nonlinear systems that require classification. This new network (MELM) can achieve higher accuracy and generalizability than concealed single-layer models. The structure of MELM can be shown in (Rashidi et al. 2021).

A schematic of the simple network structure of ELM
Genetic algorithm
The genetic algorithm (GA) is one of the evolutionary algorithms that simulates feature selection and a suitable combination for hybrids with MLP and MELM and solves problems repeatedly (Simon 2013). One of the high-performance solutions is identified in each iteration and preferably used to help make changes to new solutions for the next GA iteration, while weaker performance solutions based on their poor fitness comparison are gradually eliminated (Mirjalili 2019).
Particle swarm optimization algorithm
The PSO algorithm is a common evolutionary algorithm based on the crowding of groups. Each particle has the potential to solve the problem, and the particle swarm represents one possible solution to the problem (Eberhart and Kennedy 1995). The PSO algorithm uses iteration to find the best possible random solution and to set the minimum (Vmin) and maximum (Vmax) values to determine the quality. Best positions for individual particles (Pb) and best positions achieved globally (Gb) by the entire particle swarm are recorded for each iteration of the algorithm (Atashnezhad et al. 2014). All information is transferred to the next iteration, and the position of each particle is adjusted with its velocity and the lowest Gb and regarding the lowest Pb of the particles of each particle is done, the velocity Vt sets them to Vt + 1, where t refers to the number of iterations. For each iteration, the particles in the swarm reach the lowest RMSE target performance values that have the greatest impact on the next generation of particles (Rashidi et al. 2021). References to related velocity changes and flowcharts can be found in the articles of Singh et al. (2020) and Cai et al. (2020).
Hybrid MELM-PSO/GA model
One of the initial requirements of MELM neural network is to determine the number of hidden layers (l) and the number of neural cells (n) related to each outset, which is usually determined by trial and error (Tang et al. 2014). One of the benefits of using an optimizer algorithm is that it increases the speed and scope of the search for practical values. Finding these optimal parameters in network structure formation is very sensitive and important because selecting these optimal parameters can increase the number of hidden layers, hidden neurons, and nodes in these layers, resulting in structural complexity and inefficiency of the model, as well as increasing run time and preventing network structure formation (Zhang et al. 2016). In this paper, we use one of the most recent MELM fabrication methods (Fig. 4) to help identify the desired number of hidden layers and nodes in these layers (as opposed to trial and error); and after establishment, to help identify the optimal values of weights to be applied to each neuron in each latent layer, as well as the biases applied to each latent layer (replacement of random assignment of these values) (Farsi et al. 2021; Su et al. 2019; Zheng et al. 2019). In this article, a hybrid algorithm that combines PSO and GA optimization algorithms with a MELM network is used, which has not previously been used in this field. The combination of PSO with MELM forms a combination of PSO-MELM-PSO, and the combination of GA with this network makes GA-MELM-GA. In this study, the number of hidden layers of MELM is allowed to vary from 3 to 9, and the number of nerve cells in each hidden layer is allowed to vary from 5 to 25 in order to determine and predict FVDC (Table 2). MELM-PSO has 3 to 7 hidden layers and 10 to 20 neurons for each hidden layer with higher accuracy (lower RMSE), as shown in Table 2, and control parameters used for predicting fracture detection for the algorithm specify PSO and GA in Tables 3 and 4.

Flow chart for hybrid MELM-PSO/GA model to prediction of fracture detection
Hybrid MLP-PSO/GA model
A schematic of how to implement the MLP-PSO and MLP-GA models (Hazbeh et al. 2021b) is shown in Fig. 5. To optimize the weight and layer nodes (or neurons) in these hybrid neural networks, the MLP network is hybridized with GA and PSO algorithms (Rashidi et al. 2021; Sabah et al. 2019), as shown in Tables 5 and 6 of the control values, the PSO and GA parameters are given.

Flow chart for hybrid MLP-PSO/GA model to prediction of fracture detection
Statistical errors for FVDC prediction
To predict FVDC using HML and statistical errors, a comparison of artificial intelligence methods such as mean square error (MSE), percentage deviation (PDi), relative error (RE), average percentage deviation (APD), absolute average percentage deviation (AAPD), coefficient of determination (R2), root mean square error (RMSE; the objective function of the HML models), and standard deviation (SD). The equations used in this work are given as Eqs. (2, 3, 4, 5, 6, 7, 8) in the following section:
Mean Square Error (MSE):
Percentage deviation (PDi) or relative error (RE):
Average percentage deviation (APD):
Absolute average percentage deviation (AAPD):
Coefficient of Determination (R2):
Root Mean Square Error (RMSE):
Standard Deviation (SD):
Data collection, description, and distribution
Data collection
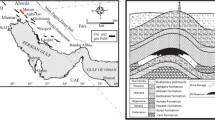
The Aghajari oil field, which includes the Asmari and Bangestan formations, is one of the oldest discovered fields and the largest in the Zagros basin. To investigate and predict FVDC, information from three wells AJ#A, AJ#B, and AJ#C in the huge Aghjari oil field on Iran's southwest coast was used (Fig. 6). There are 1026 datasets related to information collected from well AJ#A, 1057 datasets related to information collected from well AJ#B, and 936 datasets related to information collected from well AJ#C.

Schematic of Aghajari oil field's location in southwest Iran
Data description
In this work, well AJ#C was used to develop and generalize this model in other wells in order to train the software and based on the data diversity of wells AJ#A and AJ#B. The total employed data include 1026 data from well AJ#A with a distance of 3824–4131 m, 1057 data from well AJ#B with a distance of 3801–4118 m, and 936 data from well AJ#C with a distance of 3905–4185 m. The data record distance for the data sets for each well is 0.3 m. Common well-log and wireline tools record petrophysical data (Ghasemi and Bayuk 2020). Some of the petrophysical data used in this study to predict FVDC include: bit size (BS); caliper (CALI); density correction (DRHO); neutron porosity (NPHI); the photoelectric index (PEF); potassium (POTA); uranium (URAN); thorium (THOR); thorium/potassium ratio (TKRT); thorium/uranium ratio (TURT); uranium/potassium ratio (UKRT); bulk formation density (RHOB); gamma ray (GR); deep resistivity (HDRS); and shallow resistivity (HMRS). Tables 7 and 8 show statistical characterization for whole and individual data sets (AJ#A = 1026 data records; AJ#B = 1057 data records; AJ#B = 936 data records), respectively.
Data distribution
The cumulative distribution functions (CDF) (Hazbeh et al. 2021a) are one of the criteria used to describe the data (Eq. 9).
where Fx(x) is cumulative distribution functions; x is data variable value range; X is the value of variable x in a specific data record; and R is the dataset of data records.
Table 9 provides useful visually statistical information of variables for Figs. 7 and 8 (CFD for input variables) hairs with normal distributions defined by variable means and standard deviations (thicker red line).

The input variables and output values for the fracture prediction based on the CDF includes: BS (inch), CALI (inch), DRHO (g/cm3), NPHI (PU), PEF (Barn/cm3), POTA (PPM), URAN (PPM), THOR (PPM). In the cumulative distribution function (CDF), the input variables and output (thinner blue line) compared to cumulative distribtion functions for normal distributions defined by the variable means and standard deviations (thicker red line)

The input variables and output values for the fracture prediction based on the CDF include: TKRT (-), TURT (-), UKRT (-), RHOB (g/cm3), GR (GAPI), HDRS (OHMM) and HMRS (OHMM), FVDC (1/m}. In the cumulative distribution function (CDF), the input variables and output (thinner blue line) compared to cumulative distribtion functions for normal distributions defined by the variable means and standard deviations (thicker red line)
Based on the CFDs shown in Figs. 7 and 8, it can be seen that the information about the seven parameters POTA, TKRT, TURT, UKRT, HDRS, HMRS, and FVDC is not normally distributed, but the other parameters except BS that all data are the same and are normally distributed. After examining Fig. 8, it can be seen that it has the largest deviation from the normal HDRS distribution.
Result and discussion
Feature selection for FVDC prediction
One of the most important factors for improving performance and high accuracy in optimizing hybrid models is feature selection after constructing the MLP-GA model and finding the reducing of the number of independent input variables in the models using multiple evaluations and training, as well as finding the MLP structure. Based on the identified two layers with 6 and 5 nodes in their first and second hidden layers, the most effective feature selection model in minimizing RMSE can predict FVDC values. Using the MLP architecture, the approach randomly selected 30% of the total data records available for the experimental subset before assigning the remaining 70% to the training subset. Given that this method was unable to prevent the increase in the feature selection process, some features have a disproportionate effect on the predictions. The feature selection process is as follows: First, the features are selected into one, double, triple, etc., categories up to fifteen. In the next step, for example, in categories one, enter each feature as input to the MLP-GA algorithm and after outputting the RMSE value is obtained for them. Finally, for one category, the best RMSE is reported in Table 5, which here is HDRS (Q14). This comparison shows us that the most effective input feature among the categories is HDRS, and the same is true for the other categories. Table 10 implements a method for determining the combination of 15 variables in feature selection. In order to determine the combination of 15 variables in the feature selection in Table 10 according to Q1–Q15.
After checking the feature selection and combining several inputs, it calculates the RMSE values according to the selection of different inputs. Following a review, it was determined that the 12 input variables that outperformed on feature selection included RHOB, DRHO, TURT, CALI, HMRS, THOR, PEF, NPHI, POTA, HDRS, UKRT, and URAN (based on Table 11 and Fig. 9).

Feature selection for FVDC prediction to optimize the best input variable
Results for FVDC prediction
The RMSE value is one of the best and most useful statistical errors for predicting the performance of any algorithm. This algorithm was chosen because it minimizes the target performance, which four models minimize, and better performance accuracy equals less RMSE. According to 2083 data, the statistical information measured to predict FVDC in Tables 121314 includes four hybrid machine learning models developed, which include MLP-GA, MLP-PSO, MELM-GA, and MELM-PSO models. The 2083 data points are associated with two wells, AJ#A and AJ#B, and are compared using a 12-input variable feature selection method. From 2083 data related to two wells A and B, 1463 data records; ~ 70% related to training subset, 310 Data Records; ~ 15% related to testing subset and 310 data records; ~ 15% is related to validation subset.
Using the results shown in Tables 121314, it is clear that MELM-PSO has higher performance accuracy than other HML algorithms for predicting FVDC. The new and hybrid MELM-PSO algorithm has the best answer in this field for training, test, and validation subsets, as shown in Tables 12, 13, 14, with RMSE = 0.0053 1/m; R2 = 0.9903 (for training subset); RMSE = 0.00401/m; R2 = 0.9959 (for testing subset) and RMSE = 0.0047 1/m; R2 = 0.9931 (for validation subset). Figure 10 compares the predicted FVDC to the measured FVDC for each data record in the training, testing, and validation subset for the four MLP-GA, MLP-PSO, MELM-GA, and MELM-PSO models. Evaluations have shown that combining optimal PSO and GA algorithms improves MELM performance more than combining these algorithms with an MLP network. The model compares and arranges MELM-PSO > MELM-GA > MLP-GA > MLP-PSO based on the correlation coefficients in Tables 12, 13, 14, and Fig. 10.

Measured versus predicted FVDC for each data record in the training, testing and total subset evaluated for four hybrid machine learning algorithms (MLP-GA, MLP-PSO, MELM-GA and MELM-PSO) from the 2803 data point in the Aghajari oil field (AJ#A and AJ#B) based on 12-input variable feature selection
Figure 11 shows FVDC prediction error histograms displayed with normal distributions (red line) for HML algorithms based on 2083 subset data records from the Aghajari oil fields (AJ#A and AJ#B). As shown in Fig. 11, the best error for these models is MELM-PSO, and the lowest FVDC prediction error range is associated with is MELM-PSO model.

FVDC prediction error histograms display with normal distributions (red line) for four hybrid machine learning algorithms (MLP-GA, MLP-PSO, MELM-GA and MELM-PSO) based on 2083 subset data records from the Aghajari oil fields (AJ#A and AJ#B) based on 12-input variable feature selection
Figure 12 shows the RMSE diagram versus the repetition number for the four hybrid machine learning algorithms model MLP-GA, MLP-PSO, MELM-GA, and MELM-PSO for 100 replications. As shown in Fig. 12, MLP-GA, MLP-PSO, and MELM-GA algorithms converge in iterations 3, 98, and 11, respectively, but for the MELM-PSO algorithm, it also converges at the beginning. As shown in the zoomed section of Fig. 12, it is well shown from the 50 iterations that the performance accuracy of the models is MLP-PSO < MLP-GA < MELM-GA < MELM-PSO, respectively.

FVDC's RMSE vs iteration for the training subset (drawn from wells AJ#A and AJ#B) for the four hybrid machine learning algorithms model (MLP-GA, MLP-PSO, MELM-GA and MELM-PSO) during supervised learning
Development and generalization of MELM-PSO model
According to the information related to the two wells AJ#A (1026 datasets) and AJ#B (1057 datasets) and the results related to all four models used in this research to predict FVDC (MLP-GA, MLP-PSO, MELM-GA, and MELM-PSO) and presenting the results in Tables 12, 13, 14, the MELM-PSO model has better performance accuracy than other models (based on 12-input variable feature selection). This model can be concluded by using well AJ#C (936 datasets) that the MELM-PSO model has been used for other wells in these fields and has a favorable result (Table 15) (RMSE = 0.0041 1/m; R2 = 0.9964).
Figure 13 shows the predicted FVDC versus the measured value for the AJ#C well when developing the MELM-PSO model. Given the algorithm's performance accuracy, it is logical to say that it can be used in the Aghajari field. This method can be used in other fields, but it must be recalibrated with at least one well from another field before it can be used in another field.

Predicted versus measured FVDC values compared for the MEML-PSO mode trained with data from well AJ#A and AJ#B applied to AJ#C data points
Conclusions
Large data sets of 3019 data points from three wells in the Aghajari field (AJ#A, AJ#B, and AJ#C) in southwestern Iran are used to predict FVDC using four recombinant hybrid algorithms: MLP-GA, MLP-PSO, MELM-GA, and MELM-PSO. 2083 datasets from wells AJ#A and AJ#B were used to train the supervised algorithms, 1463 data sets were used for training, 310 for testing, and 310 for validation. We used feature selection to avoid unnecessary inputs that reduce performance accuracy and to find the best inputs about each other to achieve the best result in terms of performance accuracy (MLP -GA). Based on feature selection, twelve input variable well-logs are considered: bit size (BS); caliper (CALI); density correction (DRHO); neutron porosity (NPHI); the photoelectric index (PEF); potassium (POTA); uranium (URAN); thorium (THOR); thorium/potassium ratio (TKRT); thorium/uranium ratio (TURT); uranium/potassium ratio (UKRT); bulk formation density (RHOB); gamma ray (GR); deep resistivity (HDRS); and shallow resistivity (HMRS). MLP and MELM algorithms are optimized by PSO and GA optimizers. The MELM-GA/PSO models are used in one step, followed by another to determine the number of hidden layers and neurons in the network, and finally to identify the optimal weights and biases to apply to those layers and neurons. This leads to the combined GA-MELM-GA and PSO-MELM-PSO prediction models. After comparing the models used in this study, it was found that the MELM-PSO model has higher performance accuracy for data related to wells AJ#A, AJ#B and performance accuracy for this model for test data RMSE = 0.0047 1/m; R2 = 0.9931. The data field related to AJ # C was used to develop this model in comparison to other wells, and acceptable results with high accuracy were obtained with R2 = 0.9964; RMSE = 0.0041 1/m. According to the RMSE diagram vs iteration, it is clearly showing that the performance accuracy of the models is MLP-PSO < MLP-GA < MELM-GA < MELM-PSO, respectively. This method can be used in other fields, but it must be recalibrated with at least one well from another field before it can be used in another field. The developed method provides insights for the use of machine learning to improve accuracy, reduce errors, and avoid data overfitting in order to create the best possible prediction performance for FVDC prediction.
Abbreviations
- AAPD:
-
Absolute average percentage deviation
- ANN:
-
Artificial neural network
- ANFIS:
-
Adaptive neuro fuzzy inference system
- APD:
-
Average percentage deviation
- CFD:
-
Cumulative distribution functions
- CMIS:
-
Combination with the committee machine intelligent system
- CP:
-
Caliper
- CT:
-
Computed tomography
- d max :
-
Maximum aggregate size
- DR:
-
Deep resistivity
- DT:
-
Sonic interval transit time
- E :
-
Youngs modulus
- FVDC:
-
Fracture density
- GA:
-
Genetic algorithm
- G b :
-
Best positions achieved globally
- GR:
-
Gamma ray
- ILD:
-
Deep induction log
- LSSVM:
-
Least-squares support-vector machine
- MLP:
-
Multi-layer perceptron
- MSE:
-
Mean square error
- NFR:
-
Naturally fractured reservoirs
- NPHI:
-
Neutron porosity
- P b :
-
Best positions for individual particles
- PDi :
-
Percentage deviation
- PEF:
-
Photoelectric absorption factor
- P-wave:
-
Compressional wave
- Q1–Q15:
-
Characters of input variables
- R :
-
The dataset of data records
- R 2 :
-
Coefficient of determination
- RBF:
-
Radial basis function
- RE:
-
Relative error
- RHOB:
-
Bulk density
- RMSE:
-
Root mean squared error
- SD:
-
Standard deviation
- SVM:
-
Support-vector machine
- S-wave:
-
Shear wave
- V max :
-
Maximum values to determine the quality of PSO
- V min :
-
Minimum values to determine the quality of PSO
- w/c:
-
Water–cement ratio
- x :
-
Data variable value range
- X :
-
The value of variable x in a specific data record
- f’C :
-
Compressive strength
- ϶i l :
-
The value of attribute \(l\) for data record I
- ϶ minl :
-
The minimum value of the attribute \(l\) among all the data records in the dataset
- ϶ max l :
-
The maximum value of the attribute \(l\) among all the data records in the dataset
References
Abdali MR et al (2021) Petroleum well blowouts as a threat to drilling operation and wellbore sustainability: causes prevention safety and emergency response. J Constr Mater/Special Issue Sustain Pet Eng ISSN 2652:3752
Aguilera R (2008) Role of natural fractures and slot porosity on tight gas sands, SPE Unconventional Reservoirs Conference. Society of Petroleum Engineers, Moscow
AlAwad MN, Fattah K (2017) Utilization of shredded waste car tyres as a fracture seal material (FSM) in oil and gas drilling operations. J Pet Gas Eng 8:21–28. https://doi.org/10.5897/JPGE2017.0267
Ali, J. (1994). Neural networks: a new tool for the petroleum industry?, European petroleum computer conference. Society of Petroleum Engineers
Allan J, Sun SQ (2003) Controls on recovery factor in fractured reservoirs: lessons learned from 100 fractured fields, SPE annual technical conference and exhibition. Society of Petroleum Engineers, Moscow
Andersen MA et al (2013) Core truth in formation evaluation. Oilfield Review 25:16–25
Atashnezhad A et al (2014) Designing and optimizing deviated wellbore trajectories using novel particle swarm algorithms. J Nat Gas Sci Eng 21:1184–1204. https://doi.org/10.1016/j.jngse.2014.05.029
Bhattacharya S, Mishra S (2018) Applications of machine learning for facies and fracture prediction using Bayesian network theory and random forest: case studies from the Appalachian basin, USA. J Petrol Sci Eng 170:1005–1017. https://doi.org/10.1016/j.petrol.2018.06.075
Boadu FK (1998) Inversion of fracture density from field seismic velocities using artificial neural networks. Geophysics 63:534–545. https://doi.org/10.1190/1.1444354
Chandrashekar G, Sahin F (2014) A survey on feature selection methods. Comput Electr Eng 40:16–28. https://doi.org/10.1016/j.compeleceng.2013.11.024
Cheng J, Xiong Y (2017) Application of extreme learning machine combination model for dam displacement prediction. Proced Comput Sci 107:373–378. https://doi.org/10.1016/j.procs.2017.03.120
Choubineh A et al (2017) Improved predictions of wellhead choke liquid critical-flow rates: modelling based on hybrid neural network training learning based optimization. Fuel 207:547–560. https://doi.org/10.1016/j.fuel.2017.06.131
Darvishpour A et al (2019) Wellbore stability analysis to determine the safe mud weight window for sandstone layers. Pet Explor Dev 46:1031–1038. https://doi.org/10.1016/S1876-3804(19)60260-0
Dutta P et al (2007) A novel approach to fracture characterization utilizing borehole seismic data, SPE Middle East Oil and Gas Show and Conference. OnePetro. https://doi.org/10.2118/105427-MS.
Eberhart R, Kennedy J (1995) A new optimizer using particle swarm theory, MHS'95. Proceedings of the 6th international symposium on micro machine and human science. Ieee, pp 39–43. https://doi.org/10.1109/MHS.1995.494215.
Farsi M et al (2021) Predicting formation pore-pressure from well-log data with hybrid machine-learning optimization algorithms. Nat Resour Res 30(5):3455–3481
Feng Y et al (2016) A review on fracture-initiation and-propagation pressures for lost circulation and wellbore strengthening. SPE Drill Complet 31:134–144. https://doi.org/10.2118/181747-PA
Gale JF et al (2007) Natural fractures in the Barnett Shale and their importance for hydraulic fracture treatments. AAPG Bull 91:603–622. https://doi.org/10.1306/11010606061
Ghasemi M, Bayuk I (2020) Bounds for pore space parameters of petroelastic models of carbonate rocks. Izvestiya, Phys Solid Earth 56(2):207–224
Ghorbani H, Moghadasi J (2014) Development of a new comprehensive model for choke performance correlation in iranian oil wells. Adv Environ Biol 8:877–882
Ghorbani H et al (2014) Development of a new comprehensive model for choke performance correlation in iranian gas condensate wells. Adv Environ Biol 8:308–313
Ghorbani H et al (2017) The exposure of new estimating models for bubble point pressure in crude oil of one of the oil fields in Iran. Am J Oil Chem Technol. https://doi.org/10.1080/10916466.2020.1867168
Ghorbani H et al (2017) Developing a new multiphase model for choke function relation for iran’s gas wells. Am J Oil Chem Technol 5:172–180
Ghorbani H et al (2018) Prediction of oil flow rate through an orifice flow meter: artificial intelligence alternatives compared. Petroleum. https://doi.org/10.1016/j.petlm.2018.09.003
Ghorbani H et al (2020) Adaptive neuro-fuzzy algorithm applied to predict and control multi-phase flow rates through wellhead chokes. Flow Meas Instrum 76:101849. https://doi.org/10.1016/j.flowmeasinst.2020.101849
Hassanpouryouzband A et al (2018a) CO2 capture by injection of flue gas or CO2–N2 mixtures into hydrate reservoirs: dependence of CO2 capture efficiency on gas hydrate reservoir conditions. Environ Sci Technol 52:4324–4330. https://doi.org/10.1021/acs.est.7b05784
Hassanpouryouzband A et al (2018b) Insights into CO2 capture by flue gas hydrate formation: gas composition evolution in systems containing gas hydrates and gas mixtures at stable pressures. ACS Sustain Chem Eng 6:5732–5736. https://doi.org/10.1021/acssuschemeng.8b00409
Hassanpouryouzband A et al (2019) Geological CO2 capture and storage with flue gas hydrate formation in frozen and unfrozen sediments: method development, real time-scale kinetic characteristics, efficiency, and clathrate structural transition. ACS Sustain Chem Eng 7:5338–5345. https://doi.org/10.1021/acssuschemeng.8b06374
Hazbeh O et al (2021) Comparison of accuracy and computational performance between the machine learning algorithms for rate of penetration in directional drilling well. Pet Res. https://doi.org/10.1016/j.ptlrs.2021.02.004
Hazbeh O et al (2021b) Hybrid computing models to predict oil formation volume factor using multilayer perceptron algorithm. J Pet Min Eng, https://doi.org/10.21608/jpme.2021.52149.1062.
Huang G-B et al (2011) Extreme learning machine for regression and multiclass classification. IEEE Trans Syst Man Cybern Part B 42:513–529. https://doi.org/10.1109/TSMCB.2011.2168604
Ince R (2004) Prediction of fracture parameters of concrete by artificial neural networks. Eng Fract Mech 71:2143–2159. https://doi.org/10.1016/j.engfracmech.2003.12.004
Ja’fari A et al (2012) Fracture density estimation from petrophysical log data using the adaptive neuro-fuzzy inference system. J Geophys Eng 9:105–114. https://doi.org/10.1088/1742-2132/9/1/013
Jain A, Zongker D (1997) Feature selection: evaluation, application, and small sample performance. IEEE Trans Pattern Anal Mach Intell 19:153–158. https://doi.org/10.1109/34.574797
John GH et al (1994) Irrelevant features and the subset selection problem, Machine learning proceedings 1994. Elsevier, Amsterdam, pp 121–129
Khorzoughi MB et al (2018) Rock fracture density characterization using measurement while drilling (MWD) techniques. Int J Min Sci Technol 28:859–864. https://doi.org/10.1016/j.ijmst.2018.01.001
Kuramoto SI et al (2008) The first D/V Chikyu IODP operations: successful logging and coring during NanTroSEIZE stage 1 expeditions. Sci Drill 6:38–42
Li T et al (2018) Prediction of fracture density using genetic algorithm support vector machine based on acoustic logging data. Geophysics 83:D49–D60. https://doi.org/10.1190/geo2017-0229.1
Liang N-Y et al (2006) A fast and accurate online sequential learning algorithm for feedforward networks. IEEE Trans Neural Netw 17:1411–1423. https://doi.org/10.1109/TNN.2006.880583
Luthi SM (2001) Electrical borehole imaging, Geological Well Logs. Springer, Heidelberg, pp 74–123
Mirjalili S (2019) Genetic algorithm, Evolutionary algorithms and neural networks. Springer, Heidelberg, pp 43–55
Mohammadian N, Ghorbani H (2015) An investigation on chemical formation damage in Iranian reservoir by focus on mineralogy role in shale swelling potential in Pabdeh and Gurpi formations. Adv Environ Biol 9:161–166
Mohamadian N et al (2018) Rheological and filtration characteristics of drilling fluids enhanced by nanoparticles with selected additives: an experimental study. Adv Geo-Energy Res 2:228–236
Mohamadian N et al (2019) A hybrid nanocomposite of poly (styrene-methyl methacrylate-acrylic acid)/clay as a novel rheology-improvement additive for drilling fluids. J Polym Res. https://doi.org/10.1007/s10965-019-1696-6
Mohamadian N et al (2021) A geomechanical approach to casing collapse prediction in oil and gas wells aided by machine learning. J Petrol Sci Eng 196:107811. https://doi.org/10.1016/j.petrol.2020.107811
Murphy DP (1993). What's new in MWD and formation evaluation.[Measurement while drilling (MWD)]. World Oil 214. https://www.osti.gov/biblio/6512488.
Nelson R (1985) Geologic analysis of fractured reservoirs: contributions in petroleum geology and engineering. Gulf Publishing Company, Houston
Nelson R (2001) Geologic analysis of naturally fractured reservoirs. Elsevier, Amsterdam
Nouri-Taleghani M et al (2015) Fracture density determination using a novel hybrid computational scheme: a case study on an Iranian Marun oil field reservoir. J Geophys Eng 12:188–198. https://doi.org/10.1088/1742-2132/12/2/188
Ouenes A (2000) Practical application of fuzzy logic and neural networks to fractured reservoir characterization. Comput Geosci 26:953–962. https://doi.org/10.1016/S0098-3004(00)00031-5
Rashidi S et al (2020) Shear modulus prediction of embedded pressurized salt layers and pinpointing zones at risk of casing collapse in oil and gas wells. J Appl Geophys 183:104205. https://doi.org/10.1016/j.jappgeo.2020.104205
Rashidi S et al (2021) Determination of bubble point pressure & oil formation volume factor of crude oils applying multiple hidden layers extreme learning machine algorithms. J Petrol Sci Eng. https://doi.org/10.1016/j.petrol.2021.108425
Romano C et al (2019) Automated high accuracy, rapid beam hardening correction in X-ray computed tomography of multi-mineral, heterogeneous core samples. Comput Geosci 131:144–157. https://doi.org/10.1016/j.cageo.2019.06.009
Sabah M et al (2019) A machine learning approach to predict drilling rate using petrophysical and mud logging data. Earth Sci Inform 12:319–339. https://doi.org/10.1007/s12145-019-00381-4
Sarkheil H et al (2009) The fracture network modeling in naturally fractured reservoirs using artificial neural network based on image loges and core measurements. Aust J Basic Appl Sci 3:3297–3306
Sarkheil H et al (2013) Fractures distribution modeling using fractal and multi-fractal–neural network analysis in Tabnak hydrocarbon field Fars Iran. Arabian J Geosci 6:945–956
Serra O (1989) Formation MicroScanner image interpretation. Schlumberger Educational Services, Houston
Simon D (2013) Evolutionary optimization algorithms. Wiley, Hoboken
Su X et al (2019) Prediction model of hot metal temperature for blast furnace based on improved multi-layer extreme learning machine. Int J Mach Learn Cybern 10:2739–2752. https://doi.org/10.1007/s13042-018-0897-3
Suboyin A et al (2020) Hydraulic fracturing design considerations, water management challenges and insights for Middle Eastern shale gas reservoirs. Energy Rep 6:745–760. https://doi.org/10.1016/j.egyr.2020.03.017
Tang, J., et al. (2014). A fast learning algorithm for multi-layer extreme learning machine, 2014 IEEE international conference on image processing (ICIP). IEEE, pp 175–178. https://doi.org/10.1109/ICIP.2014.7025034.
Thompson L (2000) Fractured reservoirs: integration is the key to optimization. J Petrol Technol 52:52–54. https://doi.org/10.2118/56010-JPT
Tokhmechi B et al (2009) Fracture detection from water saturation log data using a Fourier–wavelet approach. J Petrol Sci Eng 69:129–138. https://doi.org/10.1016/j.petrol.2009.08.005
Toyobo O et al (2020) Benefits of real-time LWD static borehole image in reservoir navigation service, SPE Nigeria annual international conference and exhibition. Society of Petroleum Engineers. https://doi.org/10.2118/203717-MS.
Wahab MNA et al (2015) A comprehensive review of swarm optimization algorithms. PLoS One 10:1–36. https://doi.org/10.1371/journal.pone.0122827
Wang H, Sharma MM (2019) Determine in-situ stress and characterize complex fractures in naturally fractured reservoirs from diagnostic fracture injection tests. Rock Mech Rock Eng 52:5025–5045. https://doi.org/10.1007/s00603-019-01793-w
Warpinski NR et al (2009) Stimulating unconventional reservoirs: maximizing network growth while optimizing fracture conductivity. J Can Pet Technol 48:39–51. https://doi.org/10.2118/114173-PA
Xu L et al (2016) Spectral gamma-ray measurement while drilling. Petrophys SPWLA J Form Eval Reser Descr 57:377–389
Xu C et al (2019) Friction coefficient: a significant parameter for lost circulation control and material selection in naturally fractured reservoir. Energy 174:1012–1025. https://doi.org/10.1016/j.energy.2019.03.017
Yeom C-U, Kwak K-C (2017) Short-term electricity-load forecasting using a TSK-based extreme learning machine with knowledge representation. Energies 10:1613. https://doi.org/10.3390/en10101613
Zazoun RS (2013) Fracture density estimation from core and conventional well logs data using artificial neural networks: the Cambro-Ordovician reservoir of Mesdar oil field, Algeria. J Afr Earth Sc 83:55–73. https://doi.org/10.1016/j.jafrearsci.2013.03.003
Zellou A, Ouenes A (2003) Integrated fractured reservoir characterization using neural networks and fuzzy logic: Three case studies Developments in petroleum science. Elsevier, Amsterdam, pp 583–602
Zerrouki AA et al (2014) Prediction of natural fracture porosity from well log data by means of fuzzy ranking and an artificial neural network in Hassi Messaoud oil field, Algeria. J Petrol Sci Eng 115:78–89. https://doi.org/10.1016/j.petrol.2014.01.011
Zhang N et al (2016) Denoising Laplacian multi-layer extreme learning machine. Neurocomputing 171:1066–1074. https://doi.org/10.1016/j.neucom.2015.07.058
Zheng L et al (2019) Research of bearing fault diagnosis method based on multi-layer extreme learning machine optimized by novel ant lion algorithm. IEEE Access 7:89845–89856. https://doi.org/10.1109/ACCESS.2019.2926348
Acknowledgements
This research was supported by Tomsk Polytechnic University development program.
Funding
This research was supported by Tomsk Polytechnic University development program.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no known competing financial interests or personal relationships that could have influenced the work reported in this paper.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Rajabi, M., Beheshtian, S., Davoodi, S. et al. Novel hybrid machine learning optimizer algorithms to prediction of fracture density by petrophysical data. J Petrol Explor Prod Technol 11, 4375–4397 (2021). https://doi.org/10.1007/s13202-021-01321-z
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s13202-021-01321-z