
Abstract
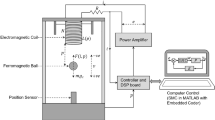
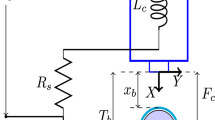
This paper focuses on the comparative performances between a Sliding Mode Controller (SMC) and a Fractional-Order SMC (FOSMC). Both the SMC and FOSMC are applied to position control of a ferromagnetic ball against gravity in a Magnetic Levitation (MagLev) system. This paper is the extended version of Roy et al. (in: 2017 Indian control conference (ICC), pp 473–478, 2017). In addition to the contribution of Roy et al. (2017), this paper (i) shows the better potential of an FOSMC over a SMC which is illustrated analytically and (ii) finds the bounds of uncertainty of the parameters of the MagLev system using frequency domain analysis. Experimental results validate the theoretical propositions. The comparative analysis based on these results reveals that the FOSMC performs better than the SMC in terms of tracking accuracy, speed of response, chattering, control effort, and control energy.










Similar content being viewed by others

References
Binazadeh, T., & Shafiei, M. (2013). Output tracking of uncertain fractional-order nonlinear systems via a novel fractional-order sliding mode approach. Mechatronics, 23(7), 888–892.
Corradini, M. L., Giamb, R., & Pettinari, S. (2015). On the adoption of a fractional-order sliding surface for the robust control of integer-order LTI plants. Automatica, 51, 364–371.
Das, S. (2011). Functional fractional calculus (2nd ed.). Berlin: Springer.
Ebrahimkhani, S. (2016). Robust fractional order sliding mode control of doubly-fed induction generator (DFIG) based wind turbines. ISA Transactions, 63, 343–354.
Fridman, L., Moreno, J., & Iriarte, R. (2011). Sliding modes after the first decade of the 21st century. Berlin: Springer.
Instruments, F. (2011). Magnetic levitation control experiments manual no 33-210. East Sussex: Feedback Instruments Ltd.
Merrikh-Bayat, F. (2012). Rules for selecting the parameters of oustaloup recursive approximation for the simulation of linear feedback systems containing PI\(^\lambda \)d\(^\mu \) controller. Communications in Nonlinear Science and Numerical Simulation, 17(4), 1852–1861.
Monje, C., Calderon, A., Vinagre, B., Chen, Y., & Feliu, V. (2004). On fractional PI\(^\lambda \) controllers: Some tuning rules for robustness to plant uncertainties. Nonlinear Dynamics, 38, 369–381.
Monje, C., Chen, Y., Vinagre, B., Xue, D., & Feliu, V. (2010). Fractional-order systems and controls: Fundamentals and applications. London: Springer.
Ogata, K. (2002). Modern control engineering (4th ed.). New Jersey: Pearson Education International.
Oldham, K. B., & Spanier, J. (1974). The fractional calculus: Theory and application of differentiation and integration to arbitrary order., Mathematics in science and engineering New York: Academic Press.
Podlubny, I. (1990). Fractional differential equations. San Diago: Academic Press.
Podlubny, I. (1999). Fractional-order systems and PI\(^\lambda \)D\(^\mu \) controllers. IEEE Transactions on Automatic Control, 44, 208–214.
Roy, P., & Roy, B. K. (2016). Fractional order PI control applied to level control in coupled two tank MIMO system with experimental validation. Control Engineering Practice, 48, 119–135.
Roy, P., Sarkar, S., Roy, B. K. & Singh, N. (2017). A comparative study between fractional order SMC and SMC applied to magnetic levitation system. In 2017 Indian control conference (ICC) (pp. 473–478).
Sara, D., & Reza, M. H. (2014). Fractional-order dynamic output feedback sliding mode control design for robust stabilization of uncertain fractional-order nonlinear systems. Asian Journal of Control, 16(2), 489–497.
Shtessel, Y., Edwards, C., Fridman, L., & Levant, A. (2010). Sliding mode control and observation. Maryland College Park: Springer.
Sutha, S., Lakshmi, P., & Sankaranarayanan, S. (2015). Fractional-order sliding mode controller design for a modified quadruple tank process via multi-level switching. Computers and Electrical Engineering, 45, 10–21.
Tang, Y., Zhang, X., Zhang, D., Zhao, G., & Guan, X. (2013). Fractional order sliding mode controller design for antilock braking systems. Neurocomputing, 111, 122–130.
Ullah, N., Shaoping, W., Khattak, M. I., & Shafi, M. (2015). Fractional order adaptive fuzzy sliding mode controller for a position servo system subjected to aerodynamic loading and nonlinearities. Aerospace Science and Technology, 43, 381–387.
Utkin, V. (1977). Variable structure systems with sliding modes. IEEE Transactions on Automatic Control, 22(2), 212–222.
Yin, C., Chen, Y., & ming Zhong, S. (2014). Fractional-order sliding mode based extremum seeking control of a class of nonlinear systems. Automatica, 50(12), 3173–3181.
Young, K., Utkin, V., & Ozguner, U. (1999). A control engineer’s guide to sliding mode control. IEEE Transactions on Control Systems Technology, 7(3), 328–342.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Roy, P., Roy, B.K. Sliding Mode Control Versus Fractional-Order Sliding Mode Control: Applied to a Magnetic Levitation System. J Control Autom Electr Syst 31, 597–606 (2020). https://doi.org/10.1007/s40313-020-00587-8
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40313-020-00587-8