
Abstract
This paper introduces a simplified presentation of a new computing procedure for solving the fuzzy Pythagorean transportation problem. To design the algorithm, we have described the Pythagorean fuzzy arithmetic and numerical conditions in three different models in Pythagorean fuzzy environment. To achieve our aim, we have first extended the initial basic feasible solution. Then an existing optimality method is used to obtain the cost of transportation. To justify the proposed method, few numerical experiments are given to show the effectiveness of the new model. Finally, some conclusion and future work are discussed.
Similar content being viewed by others

Introduction
Zadeh [1] introduced the uncertainty theory which is very useful to cope with imprecise data in many real-life problems. There are certain situations in real life where we tend to find the maximum or minimum, optimum solutions for existing problems. However, in most of the cases, the data to be handled are uncertain, imprecise and inconsistence, the obtained results are not consistent, and, therefore, uncertainty theory came into existence. During the last few decades, the topic of fuzzy optimization has achieved substantial popularity among researchers because of its widespread applications in different branches of network flow problem [2], production [3], shortest path problem [4,5,6,7,8], pick up delivery problem [9], travel salesman problem [10], traffic assignment problem [11].
Transportation problems play a significant role in many real-life applications. This problem aims to maintain the supply from source to destination. Traditionally, it has been generally assumed that transversal costs of supply/demand are expressed in terms of crisp numbers. However, these values are generally imprecise or vague. Consequently, various attempts have been made by researchers for different types of transportation problems in the fuzzy environment. In 1984, Chanas et al. [12] suggested fuzzy transportation problems. Since then many authors test the transportation problems in various fuzzy environments such as integer fuzzy [13], multi-objective [14, 15], type-2 fuzzy [16,17,18,19], interval-valued fuzzy fractional [20], interval integer fuzzy [21], interval-valued intuitionistic fuzzy [22]. Moreover, we noticed that there are numerous methods to solve this transportation problem such as extension principle [23], ranking function [24], modified Vogel’s approximation method [25], Simplex type algorithm [26], fuzzy linear programming [27], fuzzy Russell’s method [28], modified best candidate method [29], zero point and zero suffix methods [30] and so on. However, the fuzzy set takes only a membership function. Here, the degree of the non-membership function is just a compliment of the degree of the membership function. There may be a situation where the sum of the membership function and non-membership function is greater than one. Thus, Yager [31, 32] recently introduced another class of non-standard fuzzy subset, i.e., Pythagorean fuzzy set (PFS), where the square sum of the membership and the non-membership degrees sum is equal to or less than one. There are various methods in the field of PFS to solve multi-criteria decision-making problems such as: extension of TOPSIS [33], Similarity measure [34], Weighted geometric operator [35], alternative queuing method [36], analytic hierarchy process (AHP) [37], Hamacher operation [38], Einstein operations [39, 40], Maclaurin symmetric mean operator [41, 42], extended TODIM methods [43], Bonferroni mean [44], correlation coefficients [45], confidence level [46], improved score function [47, 48], and so on; see also [49,50,51,52,53].We have tabulated all those important influences of different researchers who have introduced these real-life applications under the Pythagorean fuzzy environment in Table 1.
Table 2 charts some significant influences towards transportation problem (TP). Based on the previous discussions on TP and currently available data, there are no existing methods which are available for TP under Pythagorean fuzzy environment. Therefore, there is a need to establish a new algorithm for Pythagorean fuzzy transportation problem.
To the nice of our facts, there are no optimization models in literature for TP under Pythagorean fuzzy environment. This complete scenario has motivated us to come up with a new method for solving TP with the Pythagorean fuzzy range which are formulated and solved with the use of the proposed algorithm for the first time.
Pythagorean set theory is documented technique to manage uncertainty in the optimization problem. The most contributions of this paper are as follows.
-
This approach helps to resolve a new set of problem with the Pythagorean fuzzy number.
-
We define the TP problem below normal Pythagorean fuzzy surroundings and recommend an efficient solution to locate the corresponding crisp valued.
-
Within the literature of Pythagorean fuzzy set, we tend to introduce a scoring approach in conjunction with the proposed method.
This paper is organized as follows: in the next section, some basic knowledge, concepts on Pythagorean fuzzy set theory and arithmetic operation on Pythagorean Fuzzy Numbers (PFNs) are presented. The following section includes the existing method under crisp and fuzzy transportation problems. In the next following section, the proposed method for solving the transportation problem is discussed. In section before conclusion, a few numerical examples are given to reveal the effectiveness of the proposed model. Finally, some conclusions are provided in the last section.
Preliminaries
Definition 2.1
[31, 71] Let X is a fixed set, a Pythagorean fuzzy set (PFS) is an object having the form
where the function \( \theta_{P} (x){:}\, X \to \left[ {0,1} \right] \) and \( \delta_{P} (x){:}\,X \to \left[ {0,1} \right] \) are the degree of membership and non-membership of the element \( x \in X \) to \( P \), respectively. Also for every \( x \in X, \) it holds that
Definition 2.2
[31, 71] Let \( \tilde{a}_{1}^{P} = \left( {\theta_{i}^{P} ,\delta_{s}^{P} } \right) \) and \( \tilde{b}_{1}^{P} = \left( {\theta_{o}^{P} ,\delta_{f}^{P} } \right) \) be two Pythagorean Fuzzy Numbers (PFNs).Then the arithmetic operations are as follows:
-
(i)
Additive property: \( \tilde{a}_{1}^{P} \oplus \tilde{b}_{1}^{P} = \left( {\sqrt {\left( {\theta_{i}^{P} } \right)^{2} + \left( {\theta_{o}^{P} } \right)^{2} - \left( {\theta_{i}^{P} } \right)^{2} \cdot \left( {\theta_{o}^{P} } \right)^{2} } ,\delta_{s}^{P} \cdot \delta_{f}^{P} } \right) \)
-
(ii)
Multiplicative property: \( \tilde{a}_{1}^{P} \otimes \tilde{b}_{1}^{P} = \left( {\theta_{i}^{P} \cdot \theta_{o}^{P} ,\sqrt {\left( {\delta_{s}^{P} } \right)^{2} + \left( {\delta_{f}^{P} } \right)^{2} - \left( {\delta_{s}^{P} } \right)^{2} \cdot \left( {\delta_{f}^{P} } \right)^{2} } } \right) \)
-
(iii)
Scalar product: \( k \cdot \tilde{a}_{1}^{P} = \left( {\sqrt {1 - \left( {1 - \theta_{i}^{P} } \right)^{k} } ,\left( {\delta_{s}^{P} } \right)^{k} } \right),{\text{where }}k{\text{ is nonnegative const}} . { } . {\text{i}} . {\text{e}} . { }k \succ 0 \)
Definition 2.3
[31, 71] (Comparison of two PFNs) Let \( \tilde{a}_{1}^{P} = \left( {\theta_{i}^{P} ,\delta_{s}^{P} } \right) \) and \( \tilde{b}_{1}^{P} = \left( {\theta_{o}^{P} ,\delta_{f}^{P} } \right) \) be two PFNs such that the score and accuracy function are as follows:
-
(i)
Score function: \( S\left( {\tilde{a}_{1}^{P} } \right) = \frac{1}{2}\left( {1 - \left( {\theta_{i}^{P} } \right)^{2} - \left( {\delta_{s}^{P} } \right)^{2} } \right) \)
-
(ii)
Accuracy function: \( H\left( {\tilde{a}_{1}^{P} } \right) = \left( {\theta_{i}^{P} } \right)^{2} + \left( {\delta_{s}^{P} } \right)^{2} \)
Then the following five cases arise:
- Case 1:
-
\( \tilde{a}_{1}^{P} \succ \tilde{b}_{1}^{P} {\text{ iff }}S\left( {\tilde{a}_{1}^{P} } \right) \succ S\left( {\tilde{b}_{1}^{P} } \right) \)
- Case 2:
-
\( \tilde{a}_{1}^{P} \prec \tilde{b}_{1}^{P} {\text{ iff }}S\left( {\tilde{a}_{1}^{P} } \right) \prec S\left( {\tilde{b}_{1}^{P} } \right) \)
- Case 3:
-
\( if \, S\left( {\tilde{a}_{1}^{P} } \right) = S\left( {\tilde{b}_{1}^{P} } \right)\quad{\text{and }}H\left( {\tilde{a}_{1}^{P} } \right) \prec H\left( {\tilde{b}_{1}^{P} } \right)\quad{\text{then }}\tilde{a}_{1}^{P} \prec \tilde{b}_{1}^{P} \)
- Case 4:
-
\( if \, S\left( {\tilde{a}_{1}^{P} } \right) = S\left( {\tilde{b}_{1}^{P} } \right)\quad{\text{and }}H\left( {\tilde{a}_{1}^{P} } \right) \succ H\left( {\tilde{b}_{1}^{P} } \right)\quad{\text{then }}\tilde{a}_{1}^{P} \succ \tilde{b}_{1}^{P} \)
- Case 5:
-
\( if \, S\left( {\tilde{a}_{1}^{P} } \right) = S\left( {\tilde{b}_{1}^{P} } \right)\quad{\text{and }}H\left( {\tilde{a}_{1}^{P} } \right) = H\left( {\tilde{b}_{1}^{P} } \right)\quad{\text{then }}\tilde{a}_{1}^{P} = \tilde{b}_{1}^{P} \)
Existing model in the crisp transportation environment
Let us consider “m” sources and “n” destinations. In the transportation problem, the objective is to minimize the cost of distributing a product from these sources to the destinations, but the demand and supply of the product with the following assumptions and constraints are crisp:
- \( m \) :
-
The total number of sources existing in the network
- \( n \) :
-
The total number of destination nodes
- \( i \) :
-
The source index for all m
- \( j \) :
-
The destination index for all n
- \( x_{ij} \) :
-
The number of unit of product transported from source to destination
- \( c_{ij}^{P} \) :
-
The Pythagorean fuzzy cost of one unit quantity transported from ith source to jth destination
- \( c_{ij} \) :
-
The crisp cost of one unit of quantity
- \( a_{ij} \) :
-
The available supply quantity in the crisp environment from each source
- \( a_{ij}^{P} \) :
-
The available supply quantity in the Pythagorean fuzzy environment from each source
- \( b_{ij} \) :
-
The market demand quantity in the crisp environment from each destination
- \( b_{ij}^{P} \) :
-
The market demand quantity in the Pythagorean fuzzy environment from each destination.
Then, the crisp transportation problem is as follows:
Subject to
Furthermore, if we replaced the parameter \( c_{ij} \) from Eq. (3) into Pythagorean fuzzy (PyF) parameters, i.e., \( c_{ij}^{P} \), then the new LP model obtained is called as Type I Pythagorean fuzzy transportation (T1PyFT) problem, and it is shown as the following:
Subject to
Again, if the decision maker will not be sure about the unit transportation supply and demand units, we replace the parameters \( a_{ij} \) and \( b_{ij} \) into PyF parameters. Then this type of problem is known as Type II Pythagorean fuzzy transportation (T2PyFT) problem and it is shown in the below model:
Subject to
Lastly, if the decision maker will not be sure about the transportation cost, supply and demand unit, we replace the parameter \( c_{ij} , \) \( a_{ij} \) and \( b_{ij} \) into PyF parameters. Then this type of problem is known as Type III Pythagorean fuzzy transportation (T3PyFT) problem and it is shown in the following model:
Subject to
Proposed algorithms for solving three different types of PyF transportation models
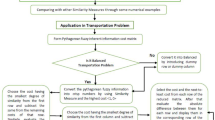
In this section, we propose a new algorithm (Main Algorithm) to solve all types of TP under Pythagorean fuzzy environment. This method contains two sub-algorithms. The first sub-algorithm (Algorithm 1) presents a method to find an initial basic feasible solution for TP and the second sub-algorithm (Algorithm 2) is an existing optimality method for calculation of the cost of transportation. These algorithms are as follows:



Illustrative example
In this section, some examples are provided to illustrate the potential application of the proposed method.
Example 5.1 (T1PyFN model)
Consider a transportation problem with the conditions of Table 3.
Step 1 Calculate the score value of each PFN cost, replace all them by its score value and obtain a crisp transportation problem. This step is shown in Table 4.
Step 2 To check the balance of transportation we execute:
Therefore, it is a balanced transportation problem.
Step 3 Now to find an initial basic feasible solution, we proceed with Algorithm 1 as it mentions in the main algorithm. After maximum allotting in the cell (2, 3) we get a new table. Table 5 shows the first allotment with penalties (Tables 6, 7, 8).
Table 9 shows the initial basic feasible solution of Example 5.1.
Hence, the initial basic feasible solution (IBFS) is as follows:
Also, the minimum cost of IBFS is obtained as follows:
Steps 4–5 Now, we test the optimality of the transportation problem. Since the m + n − 1 = 6, it is a degenerate solution, and we need to proceed to test the optimality. To obtain the optimality, we use Lingo software. Therefore, the optimal solution is as follows:
Step 6 Now put all \( x_{ij} \) in the above equation; so we get:
Minimum cost = 41.45.
Example 5.2 (T2PyFN model)
Consider type-II PyFN problem with the conditions of Table 10 where the costs are crisp, but the demand and supply are PFN. The supplies are denoted as Pythagorean fuzzy numbers, i.e.,
Similarly, the demands are also denoted as Pythagorean fuzzy numbers, respectively. We note that \( \theta^{P} ,\delta^{P} \) represent the maximum degree of the membership (i.e., the degree of acceptance of quantity) and the non-membership (i.e., the degree of rejection of quantity) respectively. Moreover, they will also satisfy the inconsistence information under these conditions, i.e., \( 0 \le \theta^{P} \le 1, \) \( 0 \le \delta^{P} \le 1, \) \( 0 \le \left( {\theta^{P} } \right)^{2} + \left( {\delta^{P} } \right)^{2} \le 1 \).
Solution
After executing the steps 1–3, we get the initial basic feasible solution as follows:
Also, the minimum cost of an initial basic feasible solution is
Again, execute the steps 4–6, we get the optimum solution, i.e.:
Minimum cost = \( 0.132978. \)
Example 5.3
Consider type-III PyFN problem with the conditions of Table 11. Here, the supplies are denoted as Pythagorean fuzzy. Similarly, the demands are also denoted as Pythagorean fuzzy numbers \( \left( {\theta^{P} ,\delta^{P} } \right) \), respectively. We note that \( \theta^{P} ,\delta^{P} \) represent the maximum degree of the membership (i.e., the degree of acceptance of quantity) and the non-membership (i.e., the degree of rejection of quantity), respectively. The cost values are also in Pythagorean fuzzy numbers where \( C^{P} \approx (C_{a}^{P} ,C_{r}^{P} ) \) represents the degree of acceptance and rejection of cost.
Solution
After executing the steps 1–3, we get the initial basic feasible solution as follows.
After executing the step 1–3, we get the initial basic feasible solution, i.e., \( (O_{2} ,D_{1} ) = x_{21} = 0.335, \) \( (O_{1} ,D_{2} ) = x_{12} = 0.135, \) \( (O_{2} ,D_{2} ) = x_{22} = 0.48, \) \( (O_{2} ,D_{3} ) = x_{23} = 0.085, \) \( (O_{3} ,D_{3} ) = x_{33} = 0.815, \) and \( (O_{1} ,D_{4} ) = x_{14} = 0.6050; \) so the minimum IBFS cost is 0.322775.
Again, by steps 4–6, we get the optimum solution i.e., \( (O_{2} ,D_{1} ) = x_{21} = 0.335, \) \( (O_{1} ,D_{2} ) = x_{12} = 0.22, \) \( (O_{2} ,D_{2} ) = x_{22} = 0.48, \) \( (O_{3} ,D_{4} ) = x_{34} = 0.085, \) \( (O_{3} ,D_{3} ) = x_{33} = 0.815, \) and \( (O_{1} ,D_{4} ) = x_{14} = 0.52, \), that the minimum cost is 0.31895.
Results and discussion
In Example 5.1, it is clear that the PyFN transportation cost of IBFS is 41.45 which is same as the optimum transportation cost of PyFN transportation problem. Hence, this shows that the optimal value is not more than the IBFS and in Example 5.2, the PyFN transportation cost of IBFS is 0.132978 which is the same as the optimum transportation cost of PyFN transportation problem. Again we observe that the optimum value is not more than the IBFS. However, in Example 5.3 the optimum transportation cost of PyFN transportation problem is 0.31895, which is less than the transportation cost of IBFS i.e. 0.322775. Therefore, we can say that the proposed method produces lower optimum values when compared with IBFS. The logical comparison for all the above three discussed examples is shown in Table 12. In this table, we can see that the optimal value of PyFN transportation problem is either equal or less than the IBFS solution.
Therefore, we can conclude that our proposed algorithm is a new way to handle the uncertainty in the crisp environment.
Conclusions
In this paper, the fuzzy Pythagorean transportation problem has been investigated. At that point, we proposed another arrangement approach for understanding whole number esteemed Pythagorean fuzzy transportation problem. Moreover, we study three different models in the Pythagorean fuzzy environment. The existing arithmetic operations on the Pythagorean fuzzy numbers and a score function are employed to find the optimum solutions. The proposed algorithm is a new way to handle the uncertainty in the crisp environment. In the future, the proposed method can be applied to real-world problems in the field of assignment, job scheduling, shortest path problem, and so on.
References
Zadeh LA (1965) Fuzzy sets. Inf Control 8:338–353
Ford LR, Fulkerson DR (1957) A simple algorithm for finding maximal network flows and an application to the hitchcock problem. Can J Math 9:210–218
Sakawa M, Nishizaki I, Uemura Y (2001) Fuzzy programming and profit and cost allocation for a production and transportation problem. Eur J Oper Res 131:1–15
Kumar R, Edalatpanah SA, Jha S, Broumi S, Dey A (2018) Neutrosophic shortest path problem. Neutrosoph Sets Syst 23:5–15
Kumar R, Edalatpanah SA, Jha S, Singh R (2019) A novel approach to solve gaussian valued neutrosophic shortest path problems. Int J Eng Adv Technol 8(3):347–353
Kumar R, Edalatpanah SA, Broumi S, Jha S, Singh R, Dey A (2019) A multi objective programming approaches to solve integer valued neutrosophic shortest path problems. Neutrosoph Sets Syst 24:134–149
Kumar R, Jha S, Singh R (2018) A different approach for solving the shortest path problem under mixed fuzzy environment. Int J Fuzzy Syst Appl 9(2):6
Kumar R, Jha S, Singh R (2017) Shortest path problem in network with type-2 triangular fuzzy arc length. J Appl Res Ind Eng 4:1–7
Ropke S, Pisinger D (2006) An adaptive large neighborhood search heuristic for the pickup and delivery problem with time windows. Transp Sci 40:455–472
Flood MM (1956) The traveling-salesman problem. Oper Res 4:61–75
Dafermos SC (1972) The traffic assignment problem for multiclass-user transportation networks. Transp Sci 6:73–87
Chanas S, Kołodziejczyk W, Machaj A (1984) A fuzzy approach to the transportation problem. Fuzzy Sets Syst 13:211–221
Tada M, Ishii H (1996) An integer fuzzy transportation problem. Comput Math Appl 31:71–87
Hashmi N, Jalil SA, Javaid S (2019) A model for two-stage fixed charge transportation problem with multiple objectives and fuzzy linguistic preferences. Soft Comput. https://doi.org/10.1007/s00500-019-03782-1
Li L, Lai KK (2000) A fuzzy approach to the multiobjective transportation problem. Comput Oper Res 27:43–57
Liu P, Yang L, Wang L, Li S (2014) A solid transportation problem with type-2 fuzzy variables. Appl Soft Comput 24:543–558
Kundu P, Kar S, Maiti M (2014) Fixed charge transportation problem with type-2 fuzzy variables. Inf Sci 255:170–186
Singh SK, Yadav SP (2016) A new approach for solving intuitionistic fuzzy transportation problem of type-2. Ann Oper Res 243:349–363
Gupta G, Kumari A (2017) An efficient method for solving intuitionistic fuzzy transportation problem of type-2. Int J Appl Comput Math 3:3795–3804
Arora J (2018) An algorithm for interval-valued fuzzy fractional transportation problem. Skit Res J 8:71–75
Akilbasha A, Pandian P, Natarajan G (2018) An innovative exact method for solving fully interval integer transportation problems. Inform Med Unlock 11:95–99
Bharati SK, Singh SR (2018) Transportation problem under interval-valued intuitionistic fuzzy environment. Int J Fuzzy Syst 20:1511–1522
Liu S-T, Kao C (2004) Solving fuzzy transportation problems based on extension principle. Eur J Oper Res 153:661–674
Kaur A, Kumar A (2011) A new method for solving fuzzy transportation problems using ranking function. Appl Math Model 35:5652–5661
Samuel AE, Venkatachalapathy M (2011) Modified Vogel’s approximation method for fuzzy transportation problems. Appl Math Sci 5:1367–1372
Gani AN, Samuel AE, Anuradha D (2011) Simplex type algorithm for solving fuzzy transportation problem. Tamsui Oxford J Inf Math Sci 27:89–98
Kour D, Mukherjee S, Basu K (2017) Solving intuitionistic fuzzy transportation problem using linear programming. Int J Syst Assur Eng Manag 8:1090–1101
Narayanamoorthy S, Saranya S, Maheswari S (2013) A method for solving fuzzy transportation problem (FTP) using fuzzy Russell’s method. Int J Intell Syst Appl 5:71–75
Dinagar DS, Keerthivasan R (2018) Solving fuzzy transportation problem using modified best candidate method. J Comput Math Sci 9:1179–1186
Ngastiti PTB, Surarso B, Sutimin (2018) Zero point and zero suffix methods with robust ranking for solving fully fuzzy transportation problems. J Phys Conf Ser 1022:01–09
Yager RR (2014) Pythagorean membership grades in multicriteria decision making. IEEE Trans Fuzzy Syst 22:958–965
Yager RR (2013) Pythagorean fuzzy subsets. In: 2013 joint IFSA world congress and NAFIPS annual meeting (IFSA/NAFIPS), pp 57–61
Zhang X, Xu Z (2014) Extension of TOPSIS to multiple criteria decision making with Pythagorean fuzzy sets. Int J Intell Syst 29:1061–1078
Zhang X (2016) A novel approach based on similarity measure for Pythagorean fuzzy multiple criteria group decision making. Int J Intell Syst 31:593–611
Ma Z, Xu Z (2016) Symmetric Pythagorean fuzzy weighted geometric/averaging operators and their application in multicriteria decision-making problems. Int J Intell Syst 31:1198–1219
Gou X, Xu Z, Liao H (2016) Alternative queuing method for multiple criteria decision making with hybrid fuzzy and ranking information. Inf Sci 357:144–160
Mohd WRW, Lazim A (2017) Pythagorean fuzzy analytic hierarchy process to multi-criteria decision making. AIP Conf Proc 1905:040020
Wu S-J, Wei G-W (2017) Pythagorean fuzzy hamacher aggregation operators and their application to multiple attribute decision making. Int J Knowl Based Intell Eng Syst 21:189–201
Garg H (2016) A new generalized Pythagorean fuzzy information aggregation using einstein operations and its application to decision making. Int J Intell Syst 31(9):886–920
Garg H (2017) Generalized Pythagorean fuzzy geometric aggregation operators using einstein t-norm and t-conorm for multicriteria decision-making process. Int J Intell Syst 32(6):597–630
Wei G, Garg H, Gao H, Wei C (2018) Interval-valued Pythagorean fuzzy maclaurin symmetric mean operators in multiple attribute decision making. IEEE Access 6:7866–7884
Wei G, Lu M (2017) Pythagorean fuzzy maclaurin symmetric mean operators in multiple attribute decision making. Int J Intell Syst 33:1043–1070
Geng Y, Liu P, Teng F, Liu Z (2017) Pythagorean fuzzy uncertain linguistic TODIM method and their application to multiple criteria group decision making. J Intell Fuzzy Syst 33:3383–3395
Jing N, Xian S, Xiao Y (2017) Pythagorean triangular fuzzy linguistic bonferroni mean operators and their application for multi-attribute decision making. In: 2nd IEEE international conference on computational intelligence and applications (ICCIA), pp 435–439
Garg H (2016) A novel correlation coefficients between pythagorean fuzzy sets and its applications to decision-making processes. Int J Intell Syst 31:1234–1252
Garg H (2017) Confidence levels based Pythagorean fuzzy aggregation operators and its application to decision-making process. Comput Math Org Theory 23:546–571
Garg H (2018) A linear programming method based on an improved score function for interval-valued pythagorean fuzzy numbers and its application to decision-making. Int J Uncertainty Fuzziness Knowl Based Syst 26:67–80
Garg H (2017) A new improved score function of an interval-valued pythagorean fuzzy set based topsis method. Int J Uncertainty Quant 7:463–474
Garg H (2016) A novel accuracy function under interval-valued Pythagorean fuzzy environment for solving multicriteria decision making problem. J Intell Fuzzy Syst 31(1):529–540
Chen S, Zeng J, Li X (2016) A hybrid method for pythagorean fuzzy multiple-criteria decision making. Int J Inf Technol Decis Making 15(2):403–422
Peng X, Yang Y (2016) Pythagorean fuzzy choquet integral based MABAC method for multiple attribute group decision making. Int J Intell Syst 31(10):989–1020
Lu M, Wei G, Alsaadi FE, Hayat T, Alsaedi A (2017) Hesitant Pythagorean fuzzy hamacher aggregation operators and their application to multiple attribute decision making. J Intell Fuzzy Syst 33(2):1105–1117
Wei G, Lu M (2017) Dual hesitant pythagorean fuzzy hamacher aggregation operators in multiple attribute decision making. Arch Control Sci 27(3):365–395
Li Z, Wei G, Lu M (2018) Pythagorean fuzzy hamy mean operators in multiple attribute group decision making and their application to supplier selection. Symmetry 10:505
Zhou J, Su W, Baležentis T, Streimikiene D (2018) Multiple criteria group decision-making considering symmetry with regards to the positive and negative ideal solutions via the Pythagorean normal cloud model for application to economic decisions. Symmetry 10(5):140
Bolturk E (2018) Pythagorean fuzzy CODAS and its application to supplier selection in a manufacturing firm. J Enterp Inf Manag 31:550–564
Qin J (2018) Generalized Pythagorean fuzzy maclaurin symmetric means and its application to multiple attribute sir group decision model. Int J Fuzzy Syst 20:943–957
Wan S-P, Li S-Q, Dong J-Y (2018) A three-phase method for Pythagorean fuzzy multi-attribute group decision making and application to haze management. Comput Ind Eng 123:348–363
Lin Y-L, Ho L-H, Yeh S-L, Chen T-Y (2018) A Pythagorean fuzzy topsis method based on novel correlation measures and its application to multiple criteria decision analysis of inpatient stroke rehabilitation. Int J Comput Intell Syst 12(1):410–425
Chen T-Y (2018) An outranking approach using a risk attitudinal assignment model involving Pythagorean fuzzy information and its application to financial decision making. Appl Soft Comput 71:460–487
Ilbahar E, Karaşan A, Cebi S, Kahraman C (2018) A novel approach to risk assessment for occupational health and safety using Pythagorean fuzzy AHP & fuzzy inference system. Saf Sci 103:124–136
Karasan A, Ilbahar E, Kahraman C (2018) A novel pythagorean fuzzy AHP and its application to landfill site selection problem. Soft Comput. https://doi.org/10.1007/s00500-018-3649-0
Zeng S, Wang N, Zhang C, Su W (2018) A novel method based on induced aggregation operator for classroom teaching quality evaluation with probabilistic and pythagorean fuzzy information. Eurasia J Math Sci Technol Educ 14:3205–3212
Ejegwa PA (2019) Improved composite relation for pythagorean fuzzy sets and its application to medical diagnosis. Granul Comput. https://doi.org/10.1007/s41066-019-00156-8
Korukoğlu S, Ballı S (2011) A improved Vogel’s approximation method for the transportation problem. Math Comput Appl 16:370–381
Kumar PS (2018) PSK method for solving intuitionistic fuzzy solid transportation problems. IJFSA 7(4):62–99
Chhibber D, Bisht DCS, Srivastava PK (2019) Ranking approach based on incenter in triangle of centroids to solve type-1 and type-2 fuzzy transportation problem. AIP Conf Proc 2061:020022
Celik E, Akyuz E (2018) An interval type-2 fuzzy AHP and TOPSIS methods for decision-making problems in maritime transportation engineering: the case of ship loader. Ocean Eng 155:371–381
Bharati SK (2019) Trapezoidal intuitionistic fuzzy fractional transportation problem in soft computing for problem solving. Singapore 20:833–842
Ahmad F, Adhami AY (2018) Neutrosophic programming approach to multiobjective nonlinear transportation problem with fuzzy parameters. Int J Manag Sci Eng Manag. https://doi.org/10.1080/17509653.2018.1545608
Reformat M, Yager RR (2014) Suggesting recommendations using pythagorean fuzzy sets illustrated using netflix movie data. In: Information processing and management of uncertainty in knowledge-based systems—15th international conference, IPMU, Montpellier, France, July 15–19, Proceedings, Part I, pp 546–556
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Kumar, R., Edalatpanah, S.A., Jha, S. et al. A Pythagorean fuzzy approach to the transportation problem. Complex Intell. Syst. 5, 255–263 (2019). https://doi.org/10.1007/s40747-019-0108-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40747-019-0108-1