
Abstract
With the emergence and development of unmanned aerial vehicles (UAVs), different sensors have become more miniaturized and intelligent. UAVs equipped with various sensors are now an important approach for acquiring spatial data. Many advantages, such as low cost, short revisiting cycle, flexibility and high precision, have made UAVs powerful tools in geological, agricultural, ecological and forestry growth monitoring, as well as evaluation. Now, UAVs are a hotspot in scientific research. Their application in mining areas (MA), although still in its infancy, is developing rapidly in terms of speed, scale and service scope. This research examines aspects such as UAV platforms, different sensors and their application fields, as well as reviewing the advances of scientific research in MA at the present time. By combining current research and the functions of multiple sensors, an application framework for UAV monitoring in MA is constructed. Finally, the challenge and prospects for the development of UAVs and sensors are also considered. This research hopes to provide a technical reference, expanding the knowledge and recognition of UAV monitoring in MA, as well as an assessment of applications in mining, reclamation and environment.
Similar content being viewed by others


1 Introduction
Mineral resources hold a significant position in economic development as a result of their importance for both raw materials and energy (Hu et al. 2014; Xiao et al. 2018a, 2019a). The demand for mineral resources has increased significantly with the growth of industry and urbanization, leading to a greater need for mining. Generally, two types of mining are widely used, surface and underground. Surface mining is where an ore body is collected after stripping and discarding the rock overlying and surrounding the ore body. Surface mines are limited by space and usually use large amounts of mechanical equipment, mainly for drilling, blasting, loading, transporting and dumping. Underground mining is the process of mining from ore bodies in underground deposits. It is usually carried out where the deposit is deep below the surface, and the mining processes are mainly directed at ore body development, cutting and stoping (Xiao et al. 2011). These mining processes all have some problems affecting safety and quality of production unavoidably. As the mining depth and angle increases in surface mining, the excavations have a direct impact on slope stability, which affects production quality. At the same time, dust emissions in mining are uncontrolled, which endangers the health of the workers. During underground processes, the roof can collapse under the weight of overburden. Transport corridors often have poor ventilation, making harmful gases difficult to discharge. Good engineering designed is the fundamental for reducing the occurrence of geological hazards in mining, which could help to realize a higher level of the mine safety and stability.
In addition to safety and management issues during mining, the environmental problems it produces cannot be ignored afterwards (Xiao et al. 2014a). Land reclamation and ecological restoration have become an additional focus of mining work. Excessive and unplanned mining are responsible for serious damage to land, water and ecology. Mineral resource exploitation is a complex process running through the whole lifetime of a mine, which include the different forms of mining, and the safe control of the mining process. Underground mining has caused collapse and fissuring of land surface, and subsidence has destroyed large areas of arable land, leading to persistent hazards such as soil erosion, waterlogging and increased carbon emissions (Lechner et al. 2016; Qu et al. 2017; Xiao et al. 2019b). Open-cast mining produces spoil heaps, tailings, solid waste and other problems, which impact on land use (Ozdemir and Kumral 2019). With an increase of mining depth and mining angle, slope stability has brought hidden dangers to mining areas (MA) with open-cast mines. At the same time, agricultural land is affected and the growing environment for crops is damaged, which impacts on the incomes of farmers and aggravates social problems. Therefore, there is a requirement of real-time monitoring in post-mining environmental (especially land use, ecological and geological hazard monitoring) for land reclamation and ecological restoration in MA, which is also the key to provide reasonable planning for sustainable mining.
The rapid development of unmanned aerial vehicle (UAV) platforms, includes lightweight on-board sensors and computer vision made UAV a new type of data acquisition. UAV-based remote sensing has become more modular, miniaturized and intelligent in recent years, and has been widely used in various fields, such as terrain surveying (Chen et al. 2015; Esposito et al. 2017; Rossi et al. 2017), precision agriculture (Yang et al. 2015; Yue et al. 2017), and forest monitoring (Luke et al. 2016; Reason et al. 2017; Vaglio et al. 2014). The UAV platform has many unique advantages, such as low cost, short revisiting cycle, efficient acquisition and easy operation (Aasen et al. 2015; Bendig et al. 2014; Dash et al. 2017; Tian et al. 2017). The images of a study area can be acquired by UAVs equipped with different sensors for different requirements and the data processing can be carried out with easily-obtained software (Rumpler et al. 2017). Safe, low-cost and time-efficient acquisition methods mean that UAVs have great potential in monitoring and surveying of high-risk mining applications compared to traditional measurement methods, which is suitable for MA. Dynamically acquiring various data at different stages in MA through UAVs equipped with different sensors is an effective way to provide continuous monitoring for risk source after mining, and planning of land reclamation (Jackisch et al. 2018; Johansen et al. 2018; Whiteside and Bartolo 2018; Min et al. 2014; Xiao et al. 2019a, b). Promotion of the coordinated development of both resource exploitation and environmental protection is now the focus of further research. At present, scientific research based on UAV data has achieved some degree of success, but UAV use is still in its infancy in MA, and lacks a systematic analysis of the existing work.
This review considers the current UAV-based scientific research in MA, breaking it into five sections: (1) Importance of UAVs and other techniques and their comparisons in MA; (2) a literature survey of UAVs in MA; (3) a summary of common UAV platforms and sensors in current research; (4) a monitoring framework of UAVs equipped with different sensors in MA; (5) future prospects and conclusions. The review aims at summarizing the different application of UAVs, and providing some pointers for their further promotion in both resource development and environment protection in MA.
2 Comparison of UAVs and other monitoring techniques in MA
Traditional measurement instruments were suitable for surveying work in plain MA, however, most MA are in remote locations with complex environments now. Because of its high efficiency, high accuracy and high automatic, GPS-RTK technique has got constant development and ripeness. Although GPS-RTK combined with traditional measurement methods could acquire high accuracy, it is not very reliable and being vulnerable to poor satellite signals. New technology like remote sensing has significant advantages in large scale environmental monitoring. With the spatial resolution of satellite remote sensing systems increased from 10 to 5 m and then better than 1 m, the high spatial resolution images are very satisfactory for both scientific researchers (Bao et al. 2014a, b; Mckenna et al. 2017; Min et al. 2014; Stumpf et al. 2014), compared to the unsafe ground mapping widely used for MA in the past. InSAR, with all weather, day and night imaging capabilities, can obtain land subsidence geographical information, which is considered as the key technology for monitoring subsidence surface in MA. These new methods obtained “surface” information instead of “point” measurements. However, various mineral resources had been damaged in different degrees and forms because of the difference in both geographical and reserves, and different monitoring indicators and their haphazard distribution makes investigative work difficult. Furthermore, mining activities have a long-lasting and progressive impact on both land and ecology, so the monitoring is not a corresponding time “point” but a continuous observation and evaluation on the time “axis”. For the investigation and monitoring of MA, satellite data sources are hard to guarantee continuous monitoring of MA in terms of scale, time, cost and high precision (Chen et al. 2015; Suh and Choi 2017). The quality of some images in cloudy or rainy days may lead to miss the best period to record images for specific needs. Compared to others monitoring methods, UAVs have the capability of short revisit period and fast data acquisition, as well as simple operations. UAVs based on different kinds of sensors could acquire multi-source data for continuous monitoring, and the centimeter-scale images could be obtained rapidly when the UAV flew at low altitudes. As a dynamic, continuous, and economical data acquisition method, UAVs now have a huge advantage in monitoring in MA compared to traditional measurements or remote sensing technology, which have been favored by researchers and workers (Table 1). However, UAVs are also subject to some internal or external factors, such as weather conditions, GPS signal, and sustaining problem.
3 The research status of UAVs based on a literature review
A total of 40 studies (except for conference articles) have been published from 2015 to 2018 related to the field of “unmanned aerial vehicle (UAV)”, “unmanned aerial system (UAS)”, “drone”, “mine(s)”, “mineral” and “mining” in the Web of Science™ Core Collection Database. Unfortunately, no articles were searched from earlier than 2014. Our analysis shows that the studies were mainly from Australia (7 articles), China (6 articles), Italy (5 articles), Finland (2 articles) and other countries (Fig. 1); and that the articles mainly focused on topographic surveying and monitoring (5 articles), three-dimensional (3D) reconstruction (6 articles) and pollution monitoring (11 articles), which occupy 55% of the total articles.

Analysis of the published papers
Keyword frequency in the published articles was analyzed by the software CiteSpace (Chen 2004) and showed that the higher frequency occurrences were mainly “unmanned aerial vehicle” (19 times), “structure from motion (SfM)” (10 times), “photogrammetry” (9 times), “imagery” (5 times), “topography” (4 times). For example, the core algorithm for 3D reconstruction was the key to modeling of open-cast mines. The emergence of UAV photogrammetry replaced traditional methods and became a new technology for comprehensive survey in MA. However, the above analysis indicates that the application of UAVs in MA is still in its infancy, and current studies still focus mainly on 3D reconstruction and topographic survey, followed by geological hazard monitoring and ecological assessment. The UAVs used in the studies were mainly fixed wing and multi-rotary wing models, and the sensors used were dominated by digital cameras. The combined use of different sensors such as spectral imaging sensors and LiDAR to obtain multi-source monitoring data is badly needed to help development of UAV use in MA.
4 Application of UAVs and different sensors
4.1 UAV platforms
UAVs are a kind of robotic aircraft with inbuilt control systems and operated by radio. They appeared first for military applications in the 1920s, to replace pilots on dangerous missions. In the past, the disadvantages of high cost, large sensors, poor endurance, and primitive flight control systems made civilian UAV use develop slowly and a few low-quality products appeared for scientific research at the beginning of the twenty first century. With the development of new technologies, the emergence of UAV manufacturers such as DJI (ShenZhen, China) has rapidly expanded the low-cost UAV market. Statistics show that the number of UAVs manufactured has increased year by year in the world and the market has developed rapidly. In 2015, the global sales of UAVs reached 1.1 million, which is a threefold increase from 2014, and the market reached 3.6 billion dollars. Similarly, the market in China reached nearly 400 million dollars in 2015, which was called “the first year of civilian UAV”.
The development of various technologies has helped UAVs achieve a good transition from military to civilian uses. Numerous UAVs now meet the demand for scientific research and other fields of use. Although there are many different configurations of the flight platform, such as fixed wing UAV, multi-rotary wing UAV and unmanned airships, the fixed wing and multi-rotor UAVs still make up a high proportion of those used in current scientific research (Fig. 2).

Keywords from the published papers based on CiteSpace. The size of squares and words reflects the frequency of words used. The larger size show the higher frequency
4.1.1 Fixed wing UAV
Fixed wing UAVs are similar to a passenger aircraft, i.e. a plane whose wing is fixed. Fixed wing UAVs have a long endurance and high flight speed, which enable them to carry out a wide range of monitoring tasks. However, the fixed wing UAV cannot take off and land vertically and so requires a certain take-off distance, which is a challenge for small-area missions. Furthermore, the fixed wing UAV has a small payload and is susceptible to wind speed during take-off and landing. Nowadays, fixed wing UAVs like Sensefly eBee and Skywalker are widely used in MA (Fig. 3). Specific parameters are shown in Table 2.

UAV platforms (DJI Phantom series takes DJI Phantom 4 as an example)
4.1.2 Multi-rotor wing UAV
Multi-rotor wing UAVs are similar to helicopters, relying on the rotation of the wing to provide lift. Variable flight speed and flexible operation make them widely used in small areas, needing only low altitude flights. The multi-rotor wing UAV can take off and land vertically, as well as hovering in the air. It can also take images from multiple angles to capture different views of a target. However, it should be pointed out that multi-rotor wing UAVs are less suitable for long-term missions, as they have limited endurance. Compared to a fixed-wing UAV, the multi-rotor can provide significant advantages in enclosed or constrained environments. The DJI Phantom series (such as Phantoms 2, 3 and 4) and AscTec Falcon8 are the most widely used in MA at the moment (Fig. 3). Specific parameters are shown in Table 2.
4.2 Different sensors deployed by UAVs
UAVs only provide a flight platform, and the success of a monitoring mission depends on the sensors they are equipped with. With the improvement of UAV performance, different sensors have also been developed rapidly. Sensors can be divided into two types according to their action: active and passive sensors. The passive sensor is an electromagnetic energy sensor, such as a digital camera or spectral imaging sensor that can only collect the reflected light energy from the sun or from the ground target itself. The active sensor emits electromagnetic waves to the ground target, and then collects the information reflected back from it, such as LiDAR, SAR, etc. Due to the payload and durability of UAVs, sensors tend to be lighter and smaller. Representative sensors widely used in both scientific research and production in MA are digital cameras (mainly Sony and Canon), spectral imaging sensors (such as Senop Rikola, MicaSense RedEdge and Parrot Sequoia), thermal infrared cameras (such as FLIR Tau2 324 and ICI thermal camera), and gas sensors (for dust monitoring, COX monitoring and NOX monitoring). Specific parameters are shown in Table 3.
These different types of sensors have also been successfully used in precision agriculture (Bendig et al. 2014; Berni et al. 2009), ecological assessment (Hardin and Jensen 2011), surveying mapping (Chen et al. 2015) and other research fields. However, their application in MA is still needs to be expanded.
4.2.1 Digital camera
The digital camera can acquire true color images of red, green, and blue bands from visible light (400–760 nm). It has lower cost and a higher number of pixels. UAVs equipped with digital cameras acquire high-resolution images of a study area, an approach which has been used widely to gather data on crop lodging (Chang et al. 2017; Liu et al. 2018) and plant height (Bendig et al. 2014; Chang et al. 2017). With the development of computer vision, new algorithms for processing terrain photography, such as SfM, can use multiple scenes to recover camera motion and scene structure automatically (Darren et al. 2012), making UAVs equipped with digital cameras highly suitable for terrain surveying (Chen et al. 2015; Esposito et al. 2017; Rossi et al. 2017) and 3D modeling (Harvey et al. 2016; Hugenholtz et al. 2015; Polat and Uysal 2018). In addition, tilt imaging system in which multiple sensors are mounted on UAVs can acquire more detailed spatial information and textures from multiple angles. This approach has been used widely for calculation of digging volumes in open-cast mining (Wang et al. 2017), as well as slope stability (Francioni et al. 2015). The emergence and development of multi-lens cameras has led to a significant increase in work efficiency, but also to greater difficulty in data processing.
4.2.2 Spectral imaging camera
Multi-spectral imaging is a remote sensing technique collecting more than two spectral channels to simultaneously image the ground target. It divides the electromagnetic wave information reflected by the target into several spectral segments for reception and recording. Small multi-spectral cameras are low in price and less affected by weather, which makes for obvious advantages in small and medium-scale high-precision monitoring. At present, the widely used small multi-spectral cameras have a separated lens and sensor provided with filters of different wavelengths; examples are the Parrot Sequoia (4 bands, Red, Green, Near Infrared, RedEdge) and Micasense RedEdge (5 bands, Red, Green, Blue, Near Infrared, RedEdge). Many indicators such as chlorophyll (Hardin and Jensen 2011), yield (Yang et al. 2015; Zaman-Allah et al. 2015) and leaf area index (Tian et al. 2017; Yue et al. 2017) can be efficiently evaluated in precision agriculture. Multi-spectral imaging also shows great potential for crop disease (Dash et al. 2017) and land use identification (Johansen et al. 2018).
Compared with the lower bandwidth and discontinuity of multi-spectral cameras, the hyperspectral camera can acquire band information in greater abundance and at higher resolution, enhancing the detectability of the ground target according to the difference in spectral information; this plays an important role in agriculture (Aasen et al. 2015; Hsieh et al. 2016) and mineral identification (Jackisch et al. 2018).
4.2.3 LiDAR
Light detection and ranging (LiDAR) is mainly divided into airborne LiDAR (ALS) and terrain LiDAR (TLS). Airborne LiDAR is an active ground observation system. The laser is transmitted to the ground surface or object, and is then reflected by the surface and passed onto the sensor. The distance is calculated by the time difference between the signal emission and reception. LiDAR is very accurate, and it can quickly acquire high density 3D point data in real time. It also has unique advantages over traditional ground measurement and photogrammetry in remote mountainous areas without sufficient ground control points (GCPs) (Sankey et al. 2017). At the same time, it can partially penetrate the canopy of trees to obtain precise 3D surface information and is useful for the prediction of tree density, height and biomass (Luke et al. 2016; Vaglio et al. 2014). In closed canopy environments it is more useful than SfM photogrammetric technique (Gago et al. 2015; Reason et al. 2017; Salach et al. 2018).
4.2.4 Thermal infrared camera
With the development of UAVs, thermal imaging cameras need to be smaller and lighter. UAVs equipped with thermal infrared sensors have been widely used in agricultural monitoring, geological survey and other fields. The water status of field crops can be monitored as a result of the significant correlation between leaf water potential, midday stem water potential, stomatal conductance and canopy temperature (Malos et al. 2013; Romero et al. 2018). Thermal infrared imaging can also assist studies aimed at crop lodging and disease (Li et al. 2014; Liu et al. 2018). In geological surveys, it can be used to obtain temperature images on a square kilometer scale, providing a solution for difficult investigation conditions in volcanoes and geothermal areas as well as the possibility for accurate heat flow survey (Harvey et al. 2016). Satisfactory results have also been achieved in the temperature measurement, field monitoring and modeling of self-igniting coal gangue and underground coal fires (Amir et al. 2012; Wang et al. 2015).
4.2.5 Gas sensor
With the rapid development of industrialization and the massive use of energy, air pollution has become a prominent problem in environmental protection. Haze, mine blasting dust and photochemical smog cause air pollution and endanger the health of people. Currently, UAVs equipped with miniature gas sensors could compensate for the lack of data from traditional monitoring stations, and could carry out both analysis and simulation of PM10, CH4 and CO2 in studies of the distribution, diffusion and transmission characteristics (Dunnington and Nakagawa 2017; Malaver et al. 2015; Miguel et al. 2015; Xiang et al. 2018).
5 Application of UAV in MA
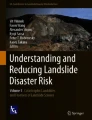
From the above analysis of the different UAV platforms and sensors, it can be seen that the advantages of UAVs, such as timeliness and low cost of data acquisition, have already been thoroughly exploited by various industries. Environment changes drastically with geological disasters in MA. Traditional data collection is limited by time and safety, and often leads to a lack of complete information for monitoring and evaluation. Low cost, high precision and notable time efficiency make UAVs a reliable data acquisition method, which can provide rich basic data and achieve synchronous monitoring for MA. Studies have shown that the effective monitoring area of UAVs is about 100–100000 m2, and the corresponding error is about 2–20 cm (Siebert and Teizer 2014). It can be seen that UAVs show great potential in mining monitoring at small or large scales. As Fig. 4 shows, relevant researches mostly focus on 3D modeling and terrain surveying, as well as ecological, geological hazard and vegetation cover monitoring.

Representative results from UAVs in MA: a 3D-view of the point cloud by digital camera (Chen et al. 2015); b radiological map with Kromek™ GR1 detector in legacy uranium mine (Martin et al. 2015); c Fissure extraction based on a knowledge model (Wang et al. 2015); d Woody cover change with Sony digital camera and MicaSense RedEdge multispectral sensor (Whiteside and Bartolo 2018)
The application of UAVs remains to be further explored for complex mining environments. Based on the advantages of different UAV platforms and sensors, monitoring demands and current research findings, this review presents a framework of UAV applications (Fig. 5). UAVs equipped with different sensors could provide basic data for different monitoring objects in MA. They could be widely used in terrain surveying and 3D modelling, land damage assessment and ecological monitoring, geological hazards and pollution monitoring, as well as land reclamation and ecological restoration assessment.

The framework of UAV applications in MA
5.1 Terrain surveying and 3D modeling
Acquisition of high-precision, high-resolution 3D-positioned information is the key to future advances improving mining efficiency. Accurate terrain data is not only the basis of 3D modelling but also important for geological risk prediction. In actual mining operations, it is often limited to employing expensive professionals and measuring equipment using information based on experience rather than accurate topographical data (Sayab et al. 2018). The traditional mapping approach uses a total station to obtain map data with CAD software, usually basing it on a specific coordinate system after acquiring the three-dimensional values of the GCPs in MA. Then, the development of 3S technology with RS, GPS and GIS technology provides an important technical guarantee for surveying and mapping in MA. GPS technology has established a control network to replace the traditional ground mapping; RS technology provides a data source for terrain mapping, and can manually obtain maps of MA by means of manual interpretation combined with field data acquisition; GIS provides MA with data support. However, the lower time resolution makes satellite imagery difficult to characterize MA undergoing drastic change. Furthermore, the satellite images have low spatial resolution and are susceptible to weather problems such as cloud cover, which means they then cannot meet the needs of terrain monitoring in a small-scale or newly-worked mine (Sayab et al. 2018). LiDAR, although capable of acquiring an accurate Digital Elevation Model (DEM), is expensive and not suitable for mining work now [Chen et al. 2015; Sayab et al. 2018].
By comparison, a UAV is inexpensive and has a wide applicability. In particular, a large number of low-cost UAVs (such as DJI in China) have emerged, which make it possible to scan the terrain rapidly and cheaply. The basic data such as Digital Surface Models (DSM), DEM and orthomosaic images can be obtained by UAVs equipped with common digital cameras (Chen et al. 2015; Esposito et al. 2017; Rossi et al. 2017). At the same time, the detailed texture information of the topography could be obtained from UAVs equipped with multi-lens cameras, which have great potential in the calculation of erosion gulley size or slope stability in MA (Francioni et al. 2015). In addition to data acquisition, a fast flow of data processing (Fig. 6) has already been created in some types of software based on SfM, such as Agisoft PhotoScan and Pix4D mapper (Rumpler et al. 2017).

Processing flow based on SfM
Depending on the positioning method, UAVs can be classified as direct georeferencing and indirect georeferencing (Padró et al. 2019). Direct georeferencing relies mainly on the integrated navigation system inside the UAV, and gives a real-time positioning through the Global Navigation Satellite System (GNSS) and Inertial Measurement Units (IMU) information. Indirect georeferencing mainly depends on correction from GCPs, and the positioning accuracy is closely related to the number and spatial distribution of the GCPs (Francisco et al. 2017; Patricio et al. 2018).
UAVs equipped with low-cost cameras can be considered as a convenient tool for surveying in surface mines. This photogrammetric method could overcome the low-resolution of satellite images and avoid the tedious ground work of total station, GPS, etc., as well as providing a 3D visualization effect of the study area. The imaging accuracy based on UAV dense point clouds can also reach centimeter level (Harvey et al. 2016; Polat and Uysal 2018; Sayab et al. 2018; Tong et al. 2015), which is comparable to Terrestrial Laser Scanning (TLS). Although TLS is highly accurate, and is generally treated as “true” results, some research has shown that it was practicable to use UAVs in MA when taking into consideration factors such as cost, accuracy, and mine size. At present, UAVs equipped with digital cameras have been used widely in MA for terrain surveying (Chen et al. 2015; Esposito et al. 2017; Kršák et al. 2016; Lee and Choi 2015; Ozdemir and Kumral 2019), earthwork volume measurement (Hugenholtz et al. 2015), three-dimensional reconstruction (Chen et al. 2015; Salvini et al. 2018; Xiang et al. 2018), slope and geological hazard monitoring (Haas et al. 2016; Malpeli and Chirico 2015; Tong et al. 2015).
5.2 Land damage assessment and ecological environment monitoring
While bringing economic benefits, mining exploitation also causes serious damage to both land and the ecological environment. Land damage is one of the most direct and long-lasting effects resulting from mining, and it is also a driving force for environmental change (Hu et al. 2011). Pressure, excavation and collapse of land caused by open-cast and underground mining are direct manifestations. Other forms of land damage which seriously affect land productivity are changes in micro-geomorphology, vegetation, soil and water system within the MA. The imbalance of hydrology and geological conditions is a particular manifestation of deep damage to the land. Assessment of land damage and dynamic monitoring of the ecological environment are, therefore, an important part of land protection and the basis for selecting different management approaches in the later stages, after the mining activities.
Scholars have studied land damage mechanisms resulting from mining subsidence by analyzing characteristics such as the physical and chemical properties of soil (Bi et al. 2014; Donnelly et al. 2001), soil moisture and nutrient status in the aerated zone (Huang et al. 2010), as well as erosion and vegetation degradation after subsidence (Burke et al. 2014; Komnitsas et al. 2010; Xiao et al. 2018b). At the same time, monitoring of both land use and ecological indicators has been another valuable component of studies on land damage and ecological changes (Darmody et al. 1992). For example, accumulated water caused by subsidence changed the type of land use, resulting in the conversion of “cultivated land-bare band-wetland” (Xiao et al. 2019b), after which the soil moisture, organic carbon and topography changed drastically. Studies have also shown that vegetation degradation and reduced cropping are significantly associated with mining in farmland affected by mining subsidence (Bian 2004; Darmody 1995; Keatley et al. 2018).
As a safe and rapid means of data collection, UAVs have shown great potential in the monitoring of land and the ecological environment affected by mining. UAVs equipped with various sensors have obtained excellent results in different applications, such as the extent of damage in land affected by subsidence (Xiao et al. 2018a, a), precise mapping of iron minerals in acid mine drainage (Jackisch et al. 2018), characterization of swamps affected by underground coal mining (Lechner et al. 2016), uranium mine mapping and identification (Martin et al. 2015; Yucel and Turan 2016) and mine lake monitoring (Agarwal et al. 2006).
5.3 Geological hazards and pollution monitoring
In the process of mining, additional geological hazards and pollution problems have sometimes emerged, threatening the progress of a mine. Effective identification and monitoring of risk sources in MA are important for ensuring safe production, in addition to being a significant component of the ecological monitoring (Francioni et al. 2015). Mine fires, unstable slopes and ground fissures seriously endanger the safety of mining production and are important targets for geological hazard monitoring in MA. These initial events may lead to secondary geological hazards such as water pollution, landslides and debris flows, while also causing changes in land structure. At the same time, the burning of shallow coal seams and surface blasting of open-cast mines generates a large amount of dust, gas pollution (NOX, SOX, CO) and by-products (CH4, CO2), which threaten the health of residents, cause acid rain and ultimately more serious ecological problems such as global warming (Dunnington and Nakagawa 2017; Miguel et al. 2015).
The UAV can provide a large amount of time series data for MA. Based on this basic information, geological hazard monitoring in MA can be carried out while reducing the negative impact caused by mining. In summary, the monitoring information on geological hazards and risk sources in MA is divided into three main parts: abnormal temperatures, air pollution and unstable slopes.
5.3.1 Abnormal temperature areas
Spatial remote sensing, aerial imaging and field survey have been shown to be very effective in identifying abnormal temperature areas in MA. Satellite systems such as NOAA/AVHRR, Landsat TM/ETM and MODIS have often been used as data sources for regional studies (Huo et al. 2015; Wulder et al. 2009), but do not achieve the same results for underground fire detection because of the lower resolution. Airborne thermal infrared and LiDAR can provide combustion maps in real time and then analyze the structural and environmental changes after the event. However, it is difficult to meet coal fire monitoring requirements in MA at a reasonable price and scale. In recent years, the rapid development of UAVs has promoted the development of new, high performance, miniaturized sensors. Geothermal areas can be safely and effectively detected by a UAV equipped with a thermal infrared camera (Harvey et al. 2016). UAVs can quickly identify and build 3D models of anomalous temperatures in MA (Malos et al. 2013; Wang et al. 2015). High-resolution UAV images are also valuable for identifying weakly anomalous or small sized areas accurately (Min et al. 2014). Furthermore, this kind of nearly real-time monitoring can provide some predictive data on the likely spread speed and trajectory of fires in MA.
5.3.2 Air pollution monitoring
Both shallow coal seam combustion and large-scale mine blasting produce large amounts of pollutants such as NOX, SOX, COX and heat radiation. Air quality monitoring is based on several fixed sampling devices for modelling and verification or estimating gas emissions based on indicators such as coal consumption. The British Geological Survey (BGS) conducted air radiation monitoring missions in light aircraft in the St. Stephen region successfully in 2014. However, it is difficult for aircraft to maintain high resolution images at higher flight altitudes, and requires highly skilled professionals (Martin et al. 2015). In recent years, UAVs equipped with gas sensors have achieved good results in the remote monitoring and control of pollutants (Dunnington and Nakagawa 2017; Martin et al. 2015).
5.3.3 Slope stability monitoring
The stability of open-cast mines is key to maintaining safety and efficiency. Examining the mechanisms of unstable slopes and monitoring them remotely are important for ensuring smooth mining operations. Studies have shown that UAVs can provide rapid identification and stability monitoring of slopes (Haas et al. 2016; Francioni et al. 2015; Salvini et al. 2018) and mine terraces (Xiang et al. 2018) in open-cast mines.
5.4 Land reclamation and ecological restoration assessment
Land reclamation and ecological restoration in MA are the principal purposes of monitoring, as well as an important measure to balance the conflicting needs of humans and the land (Hu et al. 2013; Lamb et al. 2015). At present, relevant research on mining reclamation has evolved from the monitoring of simple land damage to a more comprehensive monitoring of land and environmental change, encompassing a range from point damage information through to the whole process of damage control. Although the work related to land reclamation and ecological restoration has achieved many good results, some remaining problems of theory, technology, regulation and supervision mean that some countries have a lower rate of restoration. Monitoring after land reclamation and ecological restoration in MA is an important part of the process, and is also the key to improving both the reclamation methods and the operational efficiency (Hu et al. 2016; Xiao et al. 2014b).
Acceptability checking after land reclamation in MA usually depends on the design indicators of the reclamation plan (such as topsoil stripping and recovery, reclamation elevation, field flatness, topsoil compactness, soil moisture and organic matter) and their relationship to the actual conditions. Both assessment and monitoring of land and environment after reclamation (such as crop yield, vegetation coverage, etc.) are important parts of reclamation work (Wu et al. 2009). Studies have shown that the species make up and spatial distribution of vegetation cover can be considered as indicators of reclamation effects (Whiteside and Bartolo 2018); another study indicates that post-reclamation evaluation depends mainly on topographical factors and the accuracy of vegetation cover categories (Johansen et al. 2018). Vegetation coverage in the study area can be obtained using SPOT and Landsat satellite data as part of the assessment of the effects of reclamation (Bao et al. 2014a, b; Chen et al. 2017). However, environmental assessment after mining reclamation often needs high-accuracy maps of land use and vegetation cover (Fernández-Guisuraga et al. 2018), as well as continuous monitoring of their development (Whiteside and Bartolo 2018). Satellite images often fail to meet the requirements of reclamation monitoring and evaluation because of the lower spatial and temporal resolution (Bao et al. 2014a, b). UAVs can acquire higher resolution images repeatedly at a low altitude, making them an ideal means of data acquisition for vegetation cover and land use change. UAVs can be a transition between field sampling and satellite remote sensing. They guarantee both large scale and high-resolution data for assessment and monitoring after reclamation, with good results occurring in the evaluation of vegetation coverage (Johansen et al. 2018; Padró et al. 2019).
6 Future prospects
6.1 Development of UAV platforms and sensors
UAVs have been shown to have good prospects for application in MA. They can replace traditional measurements, and complete previously time-consuming and labor-intensive tasks rapidly, obtaining periodic data while ensuring much better resolution than satellite images (Agarwal et al. 2006). However, the low endurance means that UAVs need more flights in order to cover a large area (Tong et al. 2015), which is undoubtedly a challenge in poor regions without continuous power supply (Fernández-Lozano et al. 2018). At the same time, the payload is currently too low and is susceptible to environmental factors such as weather and terrain (Martin et al. 2015; Salvini et al. 2018). Furthermore, hyperspectral cameras, thermal infrared cameras and LiDAR suitable for UAV platforms are still expensive, limiting their use (Luke et al. 2016). At present, the bulk of the sensors used in MA are digital cameras, and the main applications are still focused on 3D reconstruction and terrain surveying. Development of low-cost sensors is necessary, therefore, to expand the service and range of UAVs in MA and achieve better research results.
6.2 Fast processing of “big” data
The rapid processing of data acquired with UAVs is still a key issue at the moment. “Big data” such as LiDAR and hyperspectral data are complex and highly demanding for computers (Luke et al. 2016). At the same time, they cannot be processed in real time and have a low degree of automation. Hyperspectral data contains a wealth of information for mineral identification (Jackisch et al. 2018) and it essential to carry out dimensional reduction and classification of hyperspectral data through intelligent computing algorithms. LiDAR is better than the SfM photogrammetric technique in a closed canopy environment (Reason et al. 2017; Salach et al. 2018; Xiao et al. 2014a), which gives it a great advantage in vegetation cover assessment after reclamation. At the same time, integrating functional modules such as LiDAR into the UAV system enables “big” data to be more quickly acquired and processed in real time. Following this development trend, continuous monitoring for infrastructure inspection and inventory analysis can be obtained by UAVs equipped with LiDAR, hyperspectral image cameras, etc. in MA to avoid repeated re-assembly of the sensor.
6.3 Acquisition and fusion of multi-source data
At present, UAVs have been widely used in MA because of their high time efficiency, high mobility and low cost. However, the effective combination of UAV data and other kinds of data (such as satellite remote sensing data, surface monitoring data, and downhole data) and its full utilization during different stages (such as before mining, mining, after mining, and after reclamation) are key issues in MA currently. (Tong et al. 2015) showed that 3D points from TLS could be a supplement to GCPs, providing a solution for remote mines where GCPs are difficult to measure with GPS; in the view of (Stumpf et al. 2014) the horizontal displacement of landslides can be monitored by means of satellite photogrammetry; (Suh and Choi 2017) showed that the combination of UAV and traditional measurement methods can achieve better results for subsidence monitoring in MA than either technique used alone. In contrast to other research areas, the environment of MA changes drastically and rapidly. Therefore, a single data source is usually insufficient to meet the needs of the actual work. The matching and fusion of multi-source data can achieve complementarity by taking advantage of each other’s strengths.
6.4 The potential of UAV applications inside the mine
The scientific application of UAVs in MA has mainly focused on surface measurements, such as 3D reconstruction, terrain surveying, landslide stability analysis and air pollution monitoring. Underground research has mostly concentrated on coal fires, but has only been able to detect points of abnormal temperature by carrying a thermal infrared camera (Malos et al. 2013; Romero et al. 2018). Accurate underground terrain mapping could help surveyors master downhole information while providing a plan for further mining operations. However, due to the dangerous environment, surveyors are unable to take close-up readings. Traditional methods can only monitor at the level of a point or line, and cannot achieve monitoring of a whole surface. At the same time, a UAV relies mainly on GPS for autonomous navigation, but GPS signals penetrate the ground poorly. An Australian mining company is currently investigating the possibility of generating 3D maps in underground mines with LiDAR-equipped UAVs, conducting experiments in a 600 m underground mine in Western Australia. The success or otherwise of UAVs in underground mines still has to pass the test of time.
7 Conclusions
With the development of the technology, UAVs are actively used in agriculture, ecological monitoring, land and resources survey along with other scientific research fields. This paper introduces research results from applications using the more advanced UAV platforms and sensors in monitoring of MA. The paper combines UAV and RS technology to construct a UAVRS monitoring framework, and discusses the current problems of UAVs in scientific research of MA. At present, the application of UAVs in mine monitoring is going through a period of rapid development. Selecting UAVs and sensors according to the actual target requirements is a key issue in mine monitoring research. Meanwhile, obtaining better application results by combining satellite, UAVRS, mine field survey and downhole data to achieve integrated “Satellite-UAV-Surface-Downhole” monitoring is the next step for scientific research in MA. This has considerable research significance, as well as economic value for constructing accurate mine location and survey data, realizing dynamic monitoring, understanding mine production and promoting sustainable development.
References
Aasen H, Burkart A, Bolten A et al (2015) Generating 3D hyperspectral information with lightweight UAV snapshot cameras for vegetation monitoring: from camera calibration to quality assurance. ISPRS J Photogramm 108(5):245–259
Agarwal R, Singh D, Chauhan DS et al (2006) Detection of coal mine fires in the Jharia coal field using NOAA/AVHRR data. J Geophys Eng 3(3):212–218
Amir K, David S, Lei T et al (2012) Low power greenhouse gas sensors for unmanned aerial vehicles. Remote Sens 4(5):1355–1368
Bao N, Lechner A, Fletcher A et al (2014a) SPOTing long-term changes in vegetation over short-term variability. Int J Surf Min Reclam Environ 28(1):2–24
Bao N, Lechner A, Johansen K et al (2014b) Object-based classification of semiarid vegetation to support mine rehabilitation and monitoring. J Appl Remote Sens 8(1):1–18
Bendig J, Bolten A, Bennertz S et al (2014) Estimating biomass of barley using crop surface models (CSMs) derived from UAV-based RGB imaging. Remote Sens 6(11):10395–10412
Berni J, Zarco-Tejada PJ, Suarez L et al (2009) Thermal and narrowband multispectral remote sensing for vegetation monitoring from an unmanned aerial vehicle. IEEE T Geosci Remote 47(3):722–738
Bi Y, Zou H, Peng C et al (2014) Effects of mining subsidence on soil water movement in sandy area. J China Coal Soc 39(s2):490–496
Bian Z (2004) Change of agricultural land quality due to mining subsidence. J China Univ Min Tech 33(2):213–218
Burke RA, Fritz KM, Chris DB et al (2014) Impacts of mountaintop removal and valley fill coal mining on C and N processing in terrestrial soils and headwater streams. Water Air Soil Poll 225(8):2081–2097
Chang A, Jung J, Maeda MM et al (2017) Crop height monitoring with digital imagery from Unmanned Aerial System (UAS). Comput Electron Agric 141:232–237
Chen C (2004) Searching for intellectual turning points: progressive knowledge domain visualization. Proc Natl Acad Sci U.S.A. 101:5303–5310
Chen J, Li K, Chang K et al (2015) Open-pit mining geomorphic feature characterization. Int J Appl Earth Obs 42:76–86
Chen W, Li X, He H et al (2017) A review of fine-scale land use and land cover classification in open-pit MAs by remote sensing techniques. Remote Sens 10(1):15–33
Darmody RG (1995) Modeling agricultural impacts of longwall mine subsidence: a GIS approach. Int J Min Reclam Env 9(2):63–68
Darmody RG, Hetzler RT, Simmons FW (1992) Coal mine subsidence: effects of mitigation on crop yields. Int J Min Reclam Env 6(4):187–190
Darren T, Arko L, Christopher W (2012) An automated technique for generating georectified mosaics from ultra-high resolution unmanned aerial vehicle (UAV) imagery, based on structure from motion (SfM) point clouds. Remote Sen 4(5):1392–1410
Dash JP, Watt MS, Pearse GD et al (2017) Assessing very high resolution UAV imagery for monitoring forest health during a simulated disease outbreak. ISPRS J Photogramm 131(7):1–14
Donnelly LJ, Cruz HDL, Asmar I et al (2001) The monitoring and prediction of mining subsidence in the Amaga, Angelopolis, Venecia and Bolombolo Regions, Antioquia, Colombia. Eng Geol 59(1):103–114
Dunnington L, Nakagawa M (2017) Fast and safe gas detection from underground coal fire by drone fly over. Environ Pollut 229:139–145
Esposito G, Mastrorocco G, Salvini R et al (2017) Application of UAV photogrammetry for the multi-temporal estimation of surface extent and volumetric excavation in the Sa Pigada Bianca open-pit mine, Sardinia, Italy. Environ Earth Sci 76(3):103–118
Fernández-Guisuraga J, Enoc SA, Suárez-Seoane S et al (2018) Using unmanned aerial vehicles in postfire vegetation survey campaigns through large and heterogeneous areas: opportunities and challenges. Sensors 18(2):586–602
Fernández-Lozano J, González-Díez A, Gutiérrez-Alonso G et al (2018) New perspectives for UAV-based modelling the roman gold mining infrastructure in NW Spain. Minerals 8(11):518–539
Francioni M, Salvini R, Stead D et al (2015) An integrated remote sensing-GIS approach for the analysis of an open pit in the Carrara marble district, Italy: slope stability assessment through kinematic and numerical methods. Comput Geotech 67:46–63
Francisco AV, Fernando CR, Patricio MC (2017) Assessment of photogrammetric mapping accuracy based on variation ground control points number using unmanned aerial vehicle. Measurement 98:221–227
Gago J, Douthe C, Coopman RE et al (2015) UAVs challenge to assess water stress for sustainable agriculture. Agr Water Manag 153:9–19
Haas F, Hilger L, Neugirg F et al (2016) Quantification and analysis of geomorphic processes on a recultivated iron ore mine on the Italian island Elba using long-time ground-based LIDAR and photogrammetric data by an UAV. Nat Hazard Earth Sys 3(10):6271–6319
Hardin PJ, Jensen RR (2011) Small-scale unmanned aerial vehicles in environmental remote sensing: challenges and opportunities. GISSCI Remote Sens 48(1):99–111
Harvey MC, Rowland J, Luketina K (2016) Drone with thermal infrared camera provides high resolution georeferenced imagery of the Waikite Geothermal Area, New Zealand. J Volcanol Geoth Res 325:61–69
Hsieh YC, Chan Y, Hu J et al (2016) Digital elevation model differencing and error estimation from multiple sources: a case study from the Meiyuan Shan landslide in Taiwan. Remote Sens 8(3):199–281
Hu Z, Hu F, Li J et al (2011) Impact of coal mining subsidence on farmland in eastern China. Int J Min Reclam Env 11(2):91–94
Hu Z, Xiao W, Wang P et al (2013) Concurrent mining and reclamation for underground coal mining. J China Coal Soc 38(2):301–307
Hu Z, Yang G, Xiao W et al (2014) Farmland damage and its impact on the overlapped areas of cropland and coal resources in the eastern plains of China. Res Con Rec 86(3):1–8
Hu Z, Chen C, Xiao W et al (2016) Surface movement and deformation characteristics due to high-intensive coal mining in the windy and sandy region. Int J Coal Sci Tech 3(3):339–348
Huang C, Goward SN, Masek JG et al (2010) An automated approach for reconstructing recent forest disturbance history using dense Landsat time series stacks. Remote Sens Environ 114(1):183–198
Hugenholtz CH, Walker J, Brown O et al (2015) Earthwork volumetrics with an unmanned aerial vehicle and softcopy photogrammetry. J Surv Eng 141(1):06014003
Huo H, Ni Z, Gao C et al (2015) A study of coal fire propagation with remotely sensed thermal infrared data. Remote Sens 7(3):3088–3113
Jackisch R, Lorenz S, Zimmermann R et al (2018) Drone-Borne hyperspectral monitoring of acid mine drainage: an example from the Sokolov Lignite District. Remote Sens 10(3):385–407
Johansen K, Erskine PD, Mccabe MF (2018) Using unmanned aerial vehicles to assess the rehabilitation performance of open cut coal mines. J Clean Prod 209:819–833
Keatley AC, Martin PG, Hallam KR et al (2018) Source identification of uranium-containing materials at mine legacy sites in Portugal. J Environ Radioactiv 183:102–111
Komnitsas K, Guo X, Li D (2010) Mapping of soil nutrients in an abandoned Chinese coal mine and waste disposal site. Miner Eng 23(8):627–635
Kršák B, Blištˇan P, Pauliková A et al (2016) Use of low-cost UAV photogrammetry to analyze the accuracy of a digital elevation model in a case study. Measurement 91:276–287
Lamb D, Erskine PD, Fletcher A (2015) Widening gap between expectations and practice in Australian mine site rehabilitation. Ecol Manag Restor 16(3):186–195
Lechner AM, Baumgartl T, Matthew P et al (2016) The impact of underground longwall mining on prime agricultural land: a review and research agenda. Land Degrad Dev 27(6):1650–1663
Lee S, Choi Y (2015) Topographic survey at small-scale open-pit mines using a popular rotary-wing unmanned aerial vehicle (Drone). Tunn Undergr Sp Tech 25(5):462–469
Li Z, Chen Z, Wang L et al (2014) Area extraction of maize lodging based on remote sensing by small unmanned aerial vehicle. Tran Chin Soci Agric Eng 30(19):207–213
Liu T, Li R, Zhong X et al (2018) Estimates of rice lodging using indices derived from UAV visible and thermal infrared images. Agr Forest Meteorol 252:144–154
Luke W, Arko L, Malenovsky Z et al (2016) Assessment of forest structure using two UAV techniques: a comparison of airborne laser scanning and structure from motion (SfM) point clouds. Forests 7(12):62–77
Malaver A, Motta N, Corke P et al (2015) Development and integration of a solar powered unmanned aerial vehicle and a wireless sensor network to monitor greenhouse gases. Sensors 15(2):4072–4096
Malos J, Beamish B, Munday L (2013) Remote monitoring of subsurface heatings in opencut coal mines. In: Proceedings of the 2013 coal operators
Malpeli KC, Chirico PG (2015) Testing a small UAS for mapping artisanal diamond mining sites in Africa. Photogramm Eng Rem S 81(4):258–263
Martin PG, Payton OD, Fardoulis JS et al (2015) The use of unmanned aerial systems for the mapping of legacy uranium mines. J Environ Radioact 143:135–140
Mckenna P, Erskine PD, Lechner AM et al (2017) Measuring fire severity using UAV imagery in semi-arid central Queensland, Australia. Int J Remote Sens 38(14):4244–4264
Miguel A, Felipe G, Andrew F et al (2015) Towards the development of a low cost airborne sensing system to monitor dust particles after blasting at open-pit mine sites. Sensors 15(8):19667–19687
Min X, Li X, Liu N et al (2014) Effect of different machinery and rolling times on the microbial activity of reclamation soil in coal area. Int J Coal Sci Tech 1(2):241–247
Ozdemir B, Kumral M (2019) A system-wide approach to minimize the operational cost of bench production in open-cast mining operations. Int J Coal Sci Technol 1(6):84–94
Padró JC, Carabassa V, Balagué J et al (2019) Monitoring opencast mine restorations using Unmanned Aerial System (UAS) imagery. Sci Total Environ 657:1602–1614
Patricio MC, Francisco AV, Fernando CR et al (2018) Assessment of UAV-photogrammetric mapping accuracy based on variation of ground control points. Int J Appl Earth Obs 72:1–10
Piero B, Filiberto C, Furio D et al (2015) UAV deployment exercise for mapping purposes: evaluation of emergency response applications. Sensors 15(7):15717–15737
Polat N, Uysal M (2018) An experimental analysis of digital elevation models generated with lidar data and UAV photogrammetry. J Indian Soc Remote 3:1–8
Qu J, Hou Y, Ge M et al (2017) Carbon dynamics of reclaimed coal mine soil under agricultural use: a chronosequence study in the Dongtan mining area, Shandong Province, China. Sustainability 9(4):629–645
Reason M, Iain W, France G et al (2017) Structure from motion (SfM) photogrammetry with drone data: a low cost method for monitoring greenhouse gas emissions from forests in developing countries. Forests 8(3):68–77
Romero M, Luo Y, Su B et al (2018) Vineyard water status estimation using multispectral imagery from an UAV platform and machine learning algorithms for irrigation scheduling management. Comput Electron Agric 147:109–117
Rossi P, Mancini F, Dubbini M et al (2017) Combining nadir and oblique UAV imagery to reconstruct quarry topography: methodology and feasibility analysis. Eur J Remote Sens 50(1):211–221
Rumpler M, Tscharf A, Mostegel C et al (2017) Evaluations on multi-scale camera networks for precise and geo-accurate reconstructions from aerial and terrestrial images with user guidance. Comput Vis Image Underst 157:255–273
Salach A, Bakula K, Pilarska M et al (2018) Accuracy assessment of point clouds from LiDAR and dense image matching acquired using the UAV platform for DTM creation. Isprs Int J Geo-inf 7(9):342–357
Salvini R, Mastrorocco G, Esposito G et al (2018) Use of a remotely piloted aircraft system for hazard assessment in a rocky mining area (Lucca, Italy). Nat Hazard Earth Sys 18(1):1–35
Sankey T, Donager J, Mcvay J et al (2017) UAV lidar and hyperspectral fusion for forest monitoring in the southwestern USA. Remote Sens Environ 195:30–43
Sayab M, Aerden D, Paananen M et al (2018) Virtual structural analysis of Jokisivu open pit using ‘structure-from-motion’ unmanned aerial vehicles (UAV) photogrammetry: implications for structurally-controlled gold deposits in Southwest Finland. Remote Sens 10(8):1296–1312
Siebert S, Teizer J (2014) Mobile 3D mapping for surveying earthwork projects using an unmanned aerial vehicle (UAV) system. Automat Constr 41(2):1–14
Stumpf A, Malet JP, Allemand P et al (2014) Surface reconstruction and landslide displacement measurements with Pleiades satellite images. ISPRS J Photogramm 95:1–12
Suh J, Choi Y (2017) Mapping hazardous mining-induced sinkhole subsidence using unmanned aerial vehicle (drone) photogrammetry. Environ Earth Sci 76(4):144–155
Tian J, Wang L, Li X et al (2017) Comparison of UAV and WorldView-2 imagery for mapping leaf area index of mangrove forest. Int J Appl Earth Obs 61:22–31
Tong X, Liu X, Chen P et al (2015) Integration of UAV-based photogrammetry and terrestrial laser scanning for the three-dimensional mapping and monitoring of open-pit mine areas. Remote Sens 7(6):6635–6662
Vaglio LG, Chen Q, Lindsell JA et al (2014) Above ground biomass estimation in an African tropical forest with lidar and hyperspectral data. Isprs J Photogramm 89(26):49–58
Wang Y, Tian F, Huang Y et al (2015) Monitoring coal fires in Datong coalfield using multi-source remote sensing data. Trans Nonferr Metal Soc 10(25):3421–3428
Wang G, Sha C, Jiang R et al (2017) Research on engineering volume calculation for open-pit mine based on UAV oblique photogrammetry. Metal Min 10:78–81
Whiteside TG, Bartolo RE (2018) A robust object-based woody cover extraction technique for monitoring mine site revegetation at scale in the monsoonal tropics using multispectral RPAS imagery from different sensors. Int J Appl Earth Obs 73:300–312
Wu L, Ma B, Liu S et al (2009) Analysis to vegetation coverage change in Shendong mining area with SPOT NDVI data. J China Coal Soc 34(9):1217–1222
Wulder MA, White JC, Alvarez F et al (2009) Characterizing boreal forest wildfire with multi-temporal Landsat and LIDAR data. Remote Sens Environ 113(7):1540–1555
Xiang J, Chen J, Sofia G et al (2018) Open-pit mine geomorphic changes analysis using multi-temporal UAV survey. Environ Earth Sci 77(6):220–237
Xiao W, Hu Z, Chugh PY et al (2011) A study of land reclamation and ecological restoration in a resource-exhausted city—a case study of Huaibei in China. Int J Min Reclam Env 25(4):332–341
Xiao W, Hu Z, Chugh PY et al (2014a) Dynamic subsidence simulation and topsoil removal strategy in high-groundwater table and underground coal mining area—a case study in Shandong Province. Int J Surf Min Reclam Environ 28(4):250–263
Xiao W, Hu Z, Fu Y et al (2014b) Zoning of land reclamation in coal mining area and new progresses for the past 10 years. Int J Coal Sci Technol 1(3):177–183
Xiao W, Chen J, Da H et al (2018a) Inversion and analysis of maize biomass in coal mining subsidence area based on UAV images. Trans Chin Soc Agric Eng 49(8):169–180
Xiao W, Fu Y, Wang T et al (2018b) Effects of land use transitions due to underground coal mining on ecosystem services in high groundwater table areas: a case study in the Yanzhou coalfield. Land Use Policy 71:213–221
Xiao W, Chen J, Zhao Y et al (2019a) Identify Maize chlorophyll impacted by coal mining subsidence in high groundwater table area based on UAV remote sensing. J China Coal Soc 44(1):302–313
Xiao W, Ren H, Lu X et al (2019b) Vegetation classification by using UAV remote sensing in coal mining subsidence wetland with high ground-water level. Trans Chin Soc Agric Eng 50(2):177–186
Yang G, Li C, Yu H et al (2015) UAV based multi-load remote sensing technologies for wheat breeding information acquirement. Trans Chin Soc Agric Eng 31(21):184–190
Yucel MA, Turan RY (2016) Areal change detection and 3D modeling of mine lakes using high-resolution unmanned aerial vehicle images. Arab J Sci Eng 41(12):4867–4878
Yue J, Yang G, Li C et al (2017) Estimation of winter wheat above-ground biomass using unmanned aerial vehicle-based snapshot hyperspectral sensor and crop height improved models. Remote Sens 9(7):708–726
Zaman-Allah M, Vergara O, Araus JL et al (2015) Unmanned aerial platform-based multi-spectral imaging for field phenotyping of maize. Plant Methods 11(1):1–10
Acknowledgements
This work is supported by the Open Fund of State Key Laboratory of Water Resource Protection and Utilization in Coal Mining (Grant No. SHJT-16-30.16), and National Key R&D Program of China (Grant No. 2016YFC0501103).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Ren, H., Zhao, Y., Xiao, W. et al. A review of UAV monitoring in mining areas: current status and future perspectives. Int J Coal Sci Technol 6, 320–333 (2019). https://doi.org/10.1007/s40789-019-00264-5
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40789-019-00264-5