
Abstract
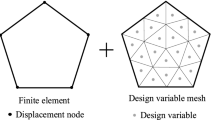
We use versatile polygonal elements along with a multiresolution scheme for topology optimization to achieve computationally efficient and high resolution designs for structural dynamics problems. The multiresolution scheme uses a coarse finite element mesh to perform the analysis, a fine design variable mesh for the optimization and a fine density variable mesh to represent the material distribution. The finite element discretization employs a conforming finite element mesh. The design variable and density discretizations employ either matching or non-matching grids to provide a finer discretization for the density and design variables. Examples are shown for the optimization of structural eigenfrequencies and forced vibration problems.
























Similar content being viewed by others
Notes
A modern (2013) quad-core 2.93Ghz Intel Xeon®; processor is used for the analyses
References
Almeida SRM, Paulino GH, Silva ECN (2009) A simple and effective inverse projection scheme for void distribution control in topology optimization. Struct Multidiscip Optim 39(4):359–371
Bendsøe MP (1989) Optimal shape design as a material distribution problem. Struct Optim 1(4):193–202
Bendsøe MP, Sigmund O (2004) Topology optimization: Theory and methods and applications. Springer
Bendsøe MP, Olhoff N, Taylor JE (1983) A variational formulation for multicriteria structural optimization. J Struct Mech 11(4):523–544
Bourdin B (2001) Filters in topology optimization. Int J Numer Methods Eng 50(9):2143–2158
Bratus A, Seiranian A (1983) Bimodal solutions in eigenvalue optimization problems. J Appl Math Mech 47(4):451–457
Cook R, Malkus D, Plesha M, Witt R (2007) Concepts and applications of finite element analysis, 4th edn. Wiley
Dahl J, Jensen JS, Sigmund O (2007) Topology optimization for transient wave propagation problems in one dimension. Struct Multidiscip Optim 36(6):585–595
Díaz A, Sigmund O (1995) Checkerboard patterns in layout optimization. Struct Optim 10(1):40–45
Du J, Olhoff N (2007) Topological design of freely vibrating continuum structures for maximum values of simple and multiple eigenfrequencies and frequency gaps. Struct Multidiscip Optim 34(2):91–110
Ghosh S (2011) Micromechanical analysis and multi-scale modeling using the Voronoi cell finite element method (computational mechanics and applied analysis). CRC Press
Guest JK (2009) Imposing maximum length scale in topology optimization. Struct Multidiscip Optim 37(5):463–473
Guest JK, Prévost JH, Belytschko T (2004) Achieving minimum length scale in topology optimization using nodal design variables and projection functions. Int J Numer Methods Eng 61(2):238–254
Haftka RT, Adelman HM (1989) Recent developments in structural sensitivity analysis. Struct Optim 1(3):137–151
Huang X, Zuo Z, Xie Y (2010) Evolutionary topological optimization of vibrating continuum structures for natural frequencies. Comput Struct 88(5–6):357–364
Jensen J S (2007) Topology optimization of dynamics problems with Pade approximantś. Int J Numer Methods Eng 72(13):1605–1630
Jog C (2002) Topology design of structures subjected to periodic loading. J Sound Vib 253(3):687–709
Jog CS, Haber RB (1996) Stability of finite element models for distributed-parameter optimization and topology design. Comput Methods Appl Mech Eng 130(3):203–226
Larsen AA, Laksafoss B, Jensen JS, Sigmund O (2008) Topological material layout in plates for vibration suppression and wave propagation control. Struct Multidiscip Optim 37(6):585–594
Ma ZD, Kikuchi N, Cheng HC (1995) Topological design for vibrating structures. Comput Methods Appl Mech Eng 121(1–4):259–280
Masur E (1985) Some additional comments on optimal structural design under multiple eigenvalue constraints. Int J Solids Struct 21(2):117–120
Matsui K, Terada K (2004) Continuous approximation of material distribution for topology optimization. Int J Numer Methods Eng 59(14):1925–1944
Maute K, Allen M (2004) Conceptual design of aeroelastic structures by topology optimization. Struct Multidiscip Optim 27(1–2):27–42
Mijar A, Swan C, Arora J, Kosaka I (1998) Continuum topology optimization for concept design of frame bracing systems. J Struct Eng 129(12):1707–1716
Nguyen TH, Paulino GH, Song J, Le CH (2009) A computational paradigm for multiresolution topology optimization (MTOP). Struct Multidiscip Optim 41(4):525–539
Nguyen TH, Paulino GH, Song J, Le CH (2012) Improving multiresolution topology optimization via multiple discretizations. Int J Numer Methods Eng 92(6):507–530
Nguyen TH, Le CH, Hajjar JF (2013) High-order finite elements for topology optimization. In: 10th World congress on structural and multidisciplinary optimization. Orlando
Olhoff N (1976) Optimization of vibrating beams with respect to higher order natural frequencies. J Struct Mech 4(1):87–122
Olhoff N (1989) Multicriterion structural optimization via bound formulation and mathematical programming. Struct Optim 1(1):11–17
Olhoff N, Niu B, Cheng G (2012) Optimum design of band-gap beam structures. Int J Solids Struct 49(22):3158–3169
Parvizian J, Düster A, Rank E (2011) Topology optimization using the finite cell method. Optim Eng 13(1):57–78
Paulino GH, Le CH (2008) A modified Q4/Q4 element for topology optimization. Struct Multidiscip Optim 37(3):255– 264
Pedersen P, Pedersen NL (2013) A note on eigenfrequency sensitivities and structural eigenfrequency optimization based on local sub-domain frequencies. Struct Multidiscip Optim
Petersson J, Sigmund O (1998) Slope constrained topology optimization. Int J Numer Methods Eng 41(8):1417–1434
Rahmatalla S, Swan C (2004) A Q4/Q4 continuum structural topology optimization implementation. Struct Multidiscip Optim 27(1–2):130–135
Rozvany GIN, Zhou M, Birker T (1992) Generalized shape optimization without homogenization. Struct Optim 4(3–4):250–252
Seyranian AP, Lund E, Olhoff N (1994) Multiple eigenvalues in structural optimization problems. Struct Optim 8(4):207–227
Sigmund O, Petersson J (1998) Numerical instabilities in topology optimization: a survey on procedures dealing with checkerboards, mesh-dependencies and local minima. Struct Optim 16(1):68–75
Sleesongsom S, Bureerat S (2013) New conceptual design of aeroelastic wing structures by multi-objective optimization. Eng Optim 45(1):107–122
Stolpe M, Svanberg K (2001) An alternative interpolation scheme for minimum compliance topology optimization. Struct Multidiscip Optim 22(2):116–124
Stromberg LL, Beghini A, Baker WF, Paulino GH (2011) Application of layout and topology optimization using pattern gradation for the conceptual design of buildings. Struct Multidisc Optim 43(2):165–180
Sukumar N (2004) Construction of polygonal interpolants: a maximum entropy approach. Int J Numer Methods Eng 61(12):2159–2181
Sukumar N, Malsch EA (2006) Recent advances in the construction of polygonal finite element interpolants. Archives Comput Methods Eng 13(1):129–163
Sutradhar A, Paulino GH, Miller MJ, Nguyen TH (2010) Topological optimization for designing patient-specific large craniofacial segmental bone replacements. Proc Natl Acad Sci US A 107(30):13,222–7
Svanberg K (1987) The method of moving asymptotesa new method for structural optimization. Int J Numer Methods Eng 24(2):359–373
Talischi C, Paulino GH, Le CH (2009a) Honeycomb Wachspress finite elements for structural topology optimization. Struct Multidiscip Optim 37(6):569–583
Talischi C, Paulino GH, Pereira A, Menezes IFM (2009b) Polygonal finite elements for topology optimization: a unifying paradigm. Int J Numer Methods Eng 82(6):671–698
Talischi C, Paulino GH, Pereira A, Menezes IFM (2012a) PolyMesher: a general-purpose mesh generator for polygonal elements written in MATLAB. Struct Multidiscip Optim 45(3): 309–328
Talischi C, Paulino GH, Pereira A, Menezes IFM (2012b) PolyTop: a MATLAB implementation of a general topology optimization framework using unstructured polygonal finite element meshes. Struct Multidiscip Optim 45(3):329– 357
Taylor J, Bendsøe MP (1984) An interpretation for min-max structural design problems including a method for relaxing constraints. Int J Solids Struct 20(4):301–314
Tcherniak D (2002) Topology optimization of resonating structures using SIMP method. Int J Numer Methods Eng 54(11):1605–1622
Tsai TD, Cheng CC (2013) Structural design for desired eigenfrequencies and mode shapes using topology optimization. Struct Multidiscip Optim 47(5):673–686
Wang F, Lazarov BS, Sigmund O (2010) On projection methods, convergence and robust formulations in topology optimization. Struct Multidiscip Optim 43(6):767–784
Yang RJ, Chahande AI (1995) Automotive applications of topology optimization. Struct Optim 9(3–4):245–249
Yoon GH (2010a) Maximizing the fundamental eigenfrequency of geometrically nonlinear structures by topology optimization based on element connectivity parameterization. Comput Struct 88(1–2):120–133
Yoon GH (2010b) Structural topology optimization for frequency response problem using model reduction schemes. Comput Methods Appl Mech Eng 199(25–28):1744–1763
Zhou K (2013) Topology optimization of truss-like continuum structures for natural frequencies. Struct Multidiscip Optim 47(4):613–619
Acknowledgments
The authors gratefully acknowledge funding provided by the National Science Foundation (NSF) through projects CMMI 1234243 and CMMI 1321661. The first author is thankful for support from the NSF Graduate Research Fellowship Program. We also acknowledge support from the Donald B. and Elizabeth M. Willett endowment at the University of Illinois at Urbana-Champaign. The fourth author acknowledges the support by the SNU Invitation Program for Distinguished Scholars and the Integrated Research Institute of Construction and Environmental Engineering at Seoul National University. Any opinion, finding, conclusions or recommendations expressed here are those of the authors and do not necessarily reflect the views of the sponsors.
Author information
Authors and Affiliations
Corresponding author
Additional information
Evgueni T. Filipov and Junho Chun were equal contribution authors.
Partially presented at 10th World Congress on Structural and Multidisciplinary Optimization, Orlando, FL, May 20-24, 2013.
Appendices
Nomenclature
- n :
-
number of density elements in the displacement element
- K :
-
global stiffness matrix
- K e :
-
stiffness matrix of displacement element e
- N e l :
-
number of elements in mesh
- D :
-
constitutive matrix
- B :
-
strain-displacement matrix of shape function deriva tives
- x :
-
position of a point in the domain, coordinate vector
- E :
-
Young’s modulus
- E 0 :
-
Young’s modulus of solid material
- ρ :
-
density values determined based on position in domain (x)
- p :
-
stiffness penalization parameter
- M :
-
global mass matrix
- M e :
-
mass matrix of displacement element e
- N e :
-
shape functions of element e
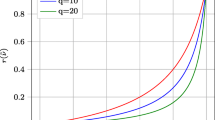
- q :
-
mass penalization parameter
- C :
-
static compliance
- u :
-
global displacement vector
- f :
-
global force vector
- d :
-
vector of design variables
- V s :
-
prescribed volume
- λ j :
-
j th eigenvalue of structure
- ω j :
-
j th eigenfrequency of structure
- ϕ j :
-
j th eigenvector of structure
- d n :
-
design variable n
- β :
-
bound parameter for optimization
- C :
-
global damping matrix
- Φ:
-
dynamic compliance
- ω s :
-
initial angular frequency of external forces
- ω e :
-
final angular frequency of external forces
- \(r_{\min }\) :
-
minimum length scale parameter
- w :
-
weight function for linear projection
- M S :
-
suspended mass
Appendix: Sensitivity analysis
To optimize for the objectives defined in Section 3, it is necessary that we calculate the sensitivity of the objective functions, and constraints with respect to the density variables. Since these are composed of the stiffness and mass terms, we calculate the derivatives of K e and M e as:
and
The sensitivity for the volume constraint can similarly be calculated as
Note that the calculation of the sensitivity of the density variables with respect to design variables (∂ ρ i /∂ d n ) is presented in Section 3.4. Subsequently, the sensitivity of static compliance can be calculated from the element displacement u e as:
1.1 A.1 Sensitivity analysis of eigenfrequencies
For free body vibrations the sensitivity of the fundamental eigenvalue λ for a specific element can be calculated as:
where ϕ j e is the eigenvector map for element e (Haftka and Adelman 1989). Furthermore the sensitivity of the first eigenvector for the entire structure can be re-written in vector form as:
Alternatively, Pedersen and Pedersen (2013) have introduced eigenfrequency sensitivities based on local sub-domains. However, in the case where there are N multiple eigenfrequencies (Seyranian et al. 1994), the following generalized gradient can be used in the optimization:
1.2 A.2 Sensitivity analysis of the dynamic compliance
Sensitivity analysis for the dynamic compliance in (24) with respect to a design variable d n is derived by a chain rule for mathematical programming:
The derivatives of ∂Φ/∂ ρ i can be obtained as follows
where
Equation (43) is obtained from derivatives of (20). It is assumed that F R and F I are independent from the filtered density. The term in the first parentheses of (42) is used as
where ▽U RΦ and ▽U IΦ are the gradients of Φ with respect to U R and U I, respectively. Those gradients can be computed as
Similar to (19), let λ=λ R+i λ I, ▽UΦ=▽U RΦ+i▽U IΦ and assume M , C and K are symmetric. The complex vector form of (45) can be described as
where F̄ denotes the complex conjugate of F. Then (44) can be expressed in complex form as:
where λ̄ and ▽UΦ¯ denote the complex conjugate of λ and ▽UΦ, respectively. For the linear system, one can show that the solution of (47) in terms of λ̄ is proportional to one of (20) in terms of U. Therefore, the conjugate of λ̄ can be computed by a scalar factor, that is
Finally, substitution of (44) and (48) into (42) yields the following
where λ ∗ is a Hermitian transpose of λ. That is \(\boldsymbol {\lambda }^{*}:=\boldsymbol {\bar {\lambda }}^{\mathrm {T}}\)
Rights and permissions
About this article

Cite this article
Filipov, E.T., Chun, J., Paulino, G.H. et al. Polygonal multiresolution topology optimization (PolyMTOP) for structural dynamics. Struct Multidisc Optim 53, 673–694 (2016). https://doi.org/10.1007/s00158-015-1309-x
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00158-015-1309-x