
Abstract
Many mechanisms behind the evolution of cooperation, such as reciprocity, indirect reciprocity, and altruistic punishment, require group knowledge of individual actions. But what keeps people cooperating when no one is looking? Conformist norm internalization, the tendency to abide by the behavior of the majority of the group, even when it is individually harmful, could be the answer. In this paper, we analyze a world where (1) there is group selection and punishment by indirect reciprocity, but (2) many actions (half) go unobserved and therefore unpunished. Can norm internalization fill this “observation gap” and lead to high levels of cooperation, even when agents may in principle cooperate only when likely to be caught and punished? Specifically, we seek to understand whether adding norm internalization to the strategy space in a public goods game can lead to higher levels of cooperation when both norm internalization and cooperation start out rare. We found the answer to be positive, but, interestingly, not because norm internalizers end up making up a substantial fraction of the population, nor because they cooperate much more than other agent types. Instead, norm internalizers, by polarizing, catalyzing, and stabilizing cooperation, can increase levels of cooperation of other agent types, while only making up a minority of the population themselves.
Significance statement
What keeps people cooperating when no one is looking? Group selection favoring cooperative groups does not require observers, but often works best when there is some other norm enforcement mechanism to supplement it. But most norm enforcement mechanisms require observers in order to function. Here, we examine whether norm internalization could fill this enforcement gap, by acting as an “internal enforcer” of norms. Perhaps surprisingly, we discovered in our simulations that the population of norm internalizers always remained quite small, and norm internalizers did not necessarily cooperate more than other agent types. Nevertheless, under certain conditions, they were able to spark significantly higher mean levels of cooperation, by causing other agents to cooperate more—partly by setting off bouts of high cooperation after periods of very low cooperation, and partly by helping maintain those bouts of high cooperation for longer.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
Introduction
Because altruism, as expressed in unconditional cooperation or in self-sacrifice, is by itself not an evolutionarily stable trait, its persistence requires a special explanation (Darwin 2011). Almost all such explanations share the characteristic that they make altruists more likely to accrue the benefits of altruism from others (Henrich 2004).
In kin altruism, the agent benefits from the altruism of its relatives, who are disproportionately likely to share its altruistic gene (Hamilton 1964; Queller 1992). Reciprocity ensures that the agent benefits from the help of those it helped in the past, either directly (Trivers 1971; Axelrod 1981; Axelrod and Hamilton 1981; Brown et al. 1982) or indirectly, when it benefits from those who act on its reputation as a cooperator (Panchanathan and Boyd 2003; Nowak and Sigmund 2005; Odouard and Price 2023). Because punishers coerce those around them into cooperating, they, too, benefit more from others’ altruism (Boyd and Richerson 1992; Boyd et al. 2003). Finally, under group selection, altruistic groups are more likely to proliferate, causing the majority of altruists to reside in highly altruistic groups and therefore benefitting collectively from altruism (Bowles et al. 2003; Nowak 2006).
Here, we examine another mechanism: conformist norm internalization, in which an agent conforms to the majority behavior of the group (Gintis 2003; Lehmann and Feldman 2008), even if this runs counter to its own (fitness) interest. Because those in cooperative groups thus conform to the cooperative norm, this conformity implies that cooperators are more likely to be in cooperative groups than non-cooperators. But this consequence of norm internalization does not elucidate why a high population of norm internalization came about in the first place (Lehmann et al. 2008b). In this paper, we examine whether norm internalization can create conditions of higher cooperation without making any assumptions about their population: that is, we allow for the possibility that they might die out.
More formally, we ask, assuming the presence of group selection and punishment,
-
Q1 Can norm internalization and cooperation proliferate when both start out rare, and, if yes,
-
Q2 Does the presence of norm internalizers (NIs) increase cooperation levels over and above the effects of group selection and punishment alone?
We split the question into two parts because we do not take norm internalization as an exogenous given. Instead, we include it as a possible agent strategy, with the possibility wide open that the strategy might go extinct (this is true of any strategy in the strategy space). Thus, to have an effect that we care about, norm internalization must (1) not go extinct and (2) influence cooperation levels positively, which is by no means a given, since norm internalizers may internalize a defection norm (for more reasons, see Henrich and Boyd 2001; Lehmann et al. 2008a). This means that we are concerned both with the selective pressures in favor of norm internalization (its causes, Q1) and its consequences (Q2).
The reason norm internalization could have an impact above the already powerful effects of punishment (Boyd and Richerson 1992; Henrich and Boyd 2001; Boyd et al. 2003, 210) is that punishment, in our model, is imperfect: many defections go undetected, and furthermore, agents know how likely they are to be caught. In these cases, can norm internalization do what punishment on its own cannot: keep agents cooperating even when no one is looking? Most previous work on the issue, in contrast to ours, (1) does not include group selection or punishment (and certainly not the imperfect punishment we use) (Lehmann and Feldman 2008); (2) holds the norm internalization trait fixed, therefore not answering question (Q1) (Henrich and Boyd 2001; Lehmann et al. 2008a); (3) uses a non-conformist norm internalization mechanism, where the pressure to internalize a norm is instead specified exogenously (Gavrilets and Richerson 2017; Lozano et al. 2020); or (4) assumes some outside benefit to conformism (Gintis 2003).
We hypothesized that norm internalization would increase between-group variation, thereby amplifying group selective forces (Henrich 2004; Boyd and Richerson 2005). This would then favor cooperative groups, which we expected would contain more NIs—positive feedback in favor of NIs. However, we found that while norm internalization polarized groups, high cooperation groups did not necessarily have more NIs. Thus, the basic feedback hypothesis was too simple.
Regarding Q1, we found that norm internalization did not quite proliferate when rare, as only a minority of agents possessed the trait in all simulations we ran. Instead, the population of NIs averaged between a third and almost zero. Nevertheless, with regard to Q2, we found that NIs did substantially increase cooperation levels, when both cooperation and norm internalization started out rare, over and above the effects of group selection and punishment. Importantly, this effect did not obtain when the NI population was the highest; rather, it was the most pronounced when NIs constituted on average about 10% of the population.
How did such a small population of NIs increase cooperation levels so substantially? They sparked higher levels of cooperation in other agents, by playing the following roles:
Polarizer | A high prevalence of norm internalizers (NIs) in a group tended to lead either to extreme cooperation or extreme defection among its members, amplifying inter-group differences in cooperation levels |
Catalyst | NIs were especially effective at precipitating cooperation (among all agent types) when global cooperation levels started very low |
Stabilizer | The presence of NIs in groups tended to prolong bouts of high total cooperation |
We derived our results from agent-based simulations where agents (1) play a public goods game in groups and (2) evolve over generations, with cooperation always starting rare. We addressed Q1 by starting with a low NI population and observing the results—this enabled us to see whether NIs could survive without going extinct, and what population level they attained. As for Q2, we compared two conditions: versions of the simulation that included NIs in the strategy space (with nothing preventing the small starting population from going extinct) with ones that did not (starting instead with a small population of unconditional cooperators). This helped us to parse whether norm internalization was able to increase cooperation levels beyond what group selection and punishment could do alone.
We performed these tests with two very different agent-based models, choosing this approach to show that our results, which turned out to be quite similar for the two models, do not depend on specific implementation details or assumptions about, for instance, group conflict rates.
“Background” will provide further information on norm internalization, group selection, and punishment, the three interacting “prosocial forces” in our model.
Background
Most of the literature on norm internalization focus on its consequences for the evolution of cooperation, rather than on its causes. Here, we are concerned with both the causes and consequences of norm internalization, with Q1 concerned with the former and Q2, the latter. In this section, we first define norm internalization and review the literature on its causes (the selective pressures favoring it) and consequences. We also examine how the two other forces in favor of cooperation, group selection and punishment, interact with norm internalization.
Defining norm internalization
We define norm internalization as the tendency to follow the majority behavior of the community, even at the expense of one’s own fitness. This is closely linked to the notion of conscience, which is an internal enforcer of norm-following that is powered by emotions such as guilt and shame (Tangney 2005; Frith and Metzinger 2016). For instance, Boehm describes conscience as the “internalization of values” (Boehm 2012), and Churchland acknowledges that conscience involves “feelings that urge us in a general direction, and judgment that shapes the urge into a specific action” (Churchland 2020). However, because “conscience” is bound up with moral emotions that are not explicitly represented in our models, we will stick to the term “norm internalization”.
Empirically, humans internalize norms from those around them (Parsons 1967; Grusec and Goodnow 1994) and follow norms even when not being observed (Fischbacher and Föllmi-Heusi 2013).
Children, furthermore, are “promiscuous normativists”, ascribing a normative character indiscriminately to observed actions, even going so far as to enforce behavior in accordance with those actions (Schmidt et al. 2016). In what follows, we aim to elucidate the evolutionary origins of these empirically observed traits.
Possible causes of norm internalization
Norm internalization as described in “Defining norm internalization” is a type of conformist transmission (defined as copying prevalent behaviors in the group, see Henrich 2004), which Henrich and Boyd showed to be beneficial in a noisy environment, as it allows individuals to effectively base their decisions on a large number of samples from the environment—that is, the samples taken by everybody else, and not just their own. Because a larger set of samples better approximates the ground truth, conformist behaviors can lead to better-adapted outcomes (Henrich and Boyd 1998). Coordination games also provide selection pressure in favor of conformist transmission (Young 1998; McElreath et al. 2003). This beneficial aspect of conformism has led to the exaptation hypothesis, which states that humans developed a propensity to copy others because it is usually beneficial, but individually harmful altruistic behaviors are also copied “by mistake” (in evolutionary terms) (Henrich and Boyd 2001; Gintis 2003). Still, copying behaviors would result in a net benefit for fitness, given the quantity of cultural behaviors that people simply could not learn on their own (Henrich and McElreath 2003). The exaptation hypothesis has a shortcoming. Many altruistic actions are manifestly costly, in terms of time (participating in group hunts), forgone benefits (not stealing), or a risk to one’s life (going to war). For this reason, the assumption that an agent would learn to copy behaviors indiscriminately as a noise-reduction mechanism seems too strong: more plausibly, conformist transmission helps the agent decide among multiple options about which some information is available. Thus, in this paper, we do not assume any external benefits to the norm internalization trait (such as the ability to learn from others in a noisy environment).
Another proposed cause of the tendency to abide by the cooperation norm, even when there would be no future consequences to defection, is risk management. In a world full of agents using the tit-for-tat strategy (Axelrod 1981), it is much more costly to defect when one should have cooperated (since it leads to an endless chain of future defections) than it is to cooperate when one could have defected (since this simply involves a one-time payment of the cooperation cost) (Delton et al. 2011). This is an elegant explanation of norm-following under certain conditions, but it is not quite sufficient for the scenario we describe, for two reasons. First, it assumes a world of tit-for-taters, when there is no particular reason for doing so, since tit-for-tat is not an evolutionarily stable strategy (no pure strategies are stable in the iterated prisoner’s dilemma as shown by Lorberbaum 1994). Second, in n-person interactions, which is what we examine here with a public goods game, direct reciprocity in the style of tit-for-tat quickly collapses (Boyd and Richerson 1988).
Group selection: consequences of norm internalization and conformist transmission
Both norm internalization and conformist transmission have an important consequence: they can amplify group selection. Group selection is vital in sustaining cooperation (Wilson et al. 2008), because it can offset the individual’s loss from cooperation with benefits accrued by the group. The strength of group selection depends on the variance among groups with respect to the trait in question (Henrich 2004), and as a result, it is particularly effective when groups are small, so that they deviate more from the average by the law of large numbers; when migration rates are low, so that differences among groups are maintained (Maynard Smith 1964); and, importantly, when conformist transmission is strong. To see why conformist transmission has this effect, imagine two groups respectively with 40/60 and 60/40 cooperation/defection ratios; if conformist transmission occurs, these groups will respectively move toward full defection and full cooperation as agents copy the majority behavior, increasing inter-group variation (Henrich and Boyd 1998). Thus, conformist transmission, with this polarizing tendency, could boost the evolution of cooperation (Fehr et al. 2002; Henrich 2004; Boyd and Richerson 2005), though with some caveats (Lehmann et al. 2008a).
Co-evolutionary hypothesis as a cause of norm internalization
This polarizing consequence of norm internalization leads us to the hypothesis that norm internalization becomes entrenched by amplifying group selection and co-evolving with cooperation. Several studies have explored this hypothesis, with mixed results:
Gavrilets and Richerson found that NIs evolved when there is strong pressure to punish free riders in part because, by cooperating, they allow the group to save on the cost of punishment (Gavrilets and Richerson 2017). However, their version of norm internalization was not dependent on the frequency of the trait—instead, the social pressure was exogenously determined by a model parameter. Our paper differs in two important respects: first, their punishment mechanism (which was central to their result) was perfect, in that all defectors could be punished. In our study, we are interested in the possibility that norm internalizers might fill the gap of imperfect punishment, where not all agents are caught, and thus, we focus on the internalization of the cooperation norm—which could potentially keep agents cooperating even when no potential punishment is observing them. Further, while Gavrilets et al., and other more recent papers, such as (Lozano et al. 2020), study a version of norm internalization whose strength is specified by an exogenous parameter, our experiment examines the case where the social pressure to follow the norm depends on the percentage of group members that follow it—leading to very different dynamics.
Lehmann and Feldman found that generally, conformist transmission of helping behaviors (which can be interpreted as norm internalization) does not promote culturally transmitted cooperation (Lehmann and Feldman 2008). One reason for that could have been the model’s assumption that groups completely reshuffle every generation, which severely hampers the development of inter-group differences. In contrast, in this paper, we relax this assumption and also include punishment by indirect reciprocity.
Punishment by indirect reciprocity
With group selection, norm internalization has an amplification effect, and with punishment, it has a complementary effect. Norm internalization is cheap when cooperation is rare, because (costly) cooperative norms are only internalized when a majority of agents cooperate. In comparison, punishment is expensive when cooperation is rare: having many defectors means that the population must expend more resources on meting out punishment (Boyd et al. 2003) (see (Boyd et al. 2010) for a possible solution). The inverse is true, too: norm internalization is expensive when cooperation is common (as it leads to the internalization of a costly cooperation norm), while punishment is cheap (few defectors to punish). Furthermore, norm internalization can get agents to cooperate where the threat of punishment cannot: that is, when an action is unlikely to be observed, and therefore unlikely to be punished. Taken together, these contrasting characteristics suggest that norm internalization and punishment would effectively complement each other.
In our model, the punishment mechanism is an imperfect variant of indirect reciprocity, namely, the withholding of benefits from those caught defecting—imperfect because not all defections are observed (see Hirshleifer and Rasmusen 1989). This form of punishment is not costly for the punisher, and it creates an incentive for egotistic agents to cooperate at least some of the time. This practice is evolutionarily stable under certain conditions (Panchanathan and Boyd 2003; Ohtsuki and Iwasa 2006; Odouard and Price 2023), is observed in many societies (Henrich and Henrich 2014; Bhui et al. , 2019), and is reproduced in experiments (Wedekind and Milinski 2000). For all these reasons, we fix the punishment mechanism, focusing not on the co-evolution of punishment and norm internalization, but rather on whether norm internalization can do its job, given the existence of an imperfect punishment mechanism.
Our niche
In brief, then, in contrast to Lehmann et al. and Gavrilets and Richerson, our study focused on the interaction between frequency-based NIs, group selection, and “imperfect” punishment. Further, no external benefits to agents are assumed (contra Gintis 2003), and no particular strategy is assumed (contra Delton et al. 2011). Could this combination of factors lead both norm internalization and cooperation to proliferate when rare?
The models
To address our questions, we designed agent-based models with free-floating populations of various agent strategies, in which both norm internalization and cooperation started rare. No version of the model had a fixed distribution of strategies—their relative frequencies were always free to evolve. Our objective was to measure (Q1) the equilibrium population of norm internalizers (NIs)—did they go extinct? sweep to fixation? and (Q2) the differences in cooperation levels when NIs were and were not present in the strategy space (allowing us to measure the effect of NIs over and above group selection and punishment).
We tested two modelsFootnote 1 because agent-based simulations can yield very different results with only minor differences in implementation (see Nowak and May 1992; Huberman and Glance 1993; Galan and Izquierdo 2005). The first, “abstract model” bears many similarities to previous work (Boyd et al. 2003; Nowak 2006): co-location of groups, fixed group sizes, fixed numbers of groups, etc. This makes it easier to both compare it with other models. The second, “naturalistic model” is more complex, locating groups in space, inspired by Grimm et al. (2005). We give an overview of the model in this section; the Appendix (in the electronic supplementary materials) contains a full specification.
Basics
Both models follow the same series of steps:
-
Decision—Agents decide, based on their strategy, whether to cooperate or defect.
-
Distribution—Public benefits are distributed to agents that were not caught defecting (punishment occurs in this step).
-
Inter-group dynamics—Groups compete, either indirectly for resources or directly by conflict. Migration occurs.
-
Selection—Individuals survive and reproduce according to fitness.
Decision
Agents, divided into groups, decide whether to cooperate or defect in a public goods game (Boyd et al. 2003). To cooperate means to pay a cost, c, to produce a benefit, b > c, that will be shared among the group (Talhelm et al. 2014). Agents also have a probability of being observed, which is sampled uniformly at random, for each agent, every round. This probability can influence agent decisions.
Agents decide whether to cooperate using a strategy parameterized by two variables: (1) the propensity to cooperate, π, and (2) the learning style, which defines how π changes. The different values of π produce a continuous space that includes unconditional defection, expected value (EV) maximization, and unconditional cooperation. Norm internalization is encoded in the learning style. More specifically, with pobs being the probability of being observed and \(\overline{b}\) the average group benefit distribution (see “Distribution”) in the previous round, an agent cooperates when
unless they err, with probability ϵ. Thus, π = 0 corresponds to an EV maximizer, as the resulting equation compares the expected cost of defecting (pobs\(\overline{b}\)) to the expected cost of cooperating (c) and picks the lower-cost option. By contrast, π = 1 corresponds to unconditional cooperation (since pobs\(\overline{b}\) ≥ 0 no matter what), and π ≪ 0 corresponds to unconditional defection. The learning style defines how π changes:
-
Norm internalization: Gradually approach a π value of 1 (cooperation regardless of who is watching) as long as a majority of other agents cooperate; otherwise, approach 0 (EV maximization).
-
Selfish: Move in the direction that yields the best individual payoff.
-
Static: Do not learn.
We included the selfish learners to strengthen our results, as individual learning likely hampers the evolution of cooperation (Lehmann et al. 2008b). Further, it ensures NIs are not be the only agents with a dynamic π value, providing them with adequate competition from a selfish agent that also had a dynamic π value. Of course, many selfish learning rules are possible, and we chose this one for simplicity—our focus is to compare the presence and absence of NIs in the strategy space, not the effects of different types of selfish strategies.
Distribution
After agents make their choices, they are observed with probability pobs. The total contributions of cooperators are distributed to group members who were not observed defecting, each receiving a share \(\overline{b}\). Thus, agents for whom there was either (1) a high pobs or (2) a high \(\overline{b}\) have a stronger incentive to cooperate. The distribution of the benefits results in the payoffs shown in Table 1 (see also Fig. 1, a2, n3)

The steps taken in each iteration of the model. Described fully in the text. In the abstract model, decision (DEC), distribution (DIS), inter-group dynamics (IGD), and selection (SEL) occur in sequence. By contrast, in the naturalistic model, these steps are interspersed with each other
Inter-group dynamics and selection
Inter-group conflict is implemented quite differently in the two models, as described in detail in “Abstract model” and “Naturalistic model”. As for migration, we test a variety of migration rates, but in both models, they focus most of our analysis on parameters that yield approximately a 50% migration rate—that is, agents have a 50% probability of dying in a group that they were not born in, motivated by the high migration probabilities observed in hunter-gatherer societies (Hill et al. 2011).
Parameters
We ran both models on the lower end of the range of values in which cooperation did not go extinct, which was b/c ∈ [2.75, 4.25], with increments of 0.25 (benefits lower than this range never resulted in cooperative worlds). We tested two conditions:
-
Norm internalization: 2% of agents started with the norm internalization trait.
-
No norm internalization: No NIs were present in the strategy space, so we replaced the 2% starting population of NIs with unconditional cooperators.
For both conditions, the remainder of agents was split between selfish and static learners, with each with a (unique) propensity π uniformly sampled between − 1 and 1. We did this to make as few assumptions about the initial population as possible. That said, agents with π values far from zero quickly died off, leaving behind, at the start of the run, agents who were effectively EV maximizers. As for why we included unconditional cooperators in the non-NI model, we needed a cooperative type of agent for forces like group selection and punishment to favor, to fill the role of the NIs in the NI condition. The obvious choice to fill this role is the unconditional cooperator. The key parameters appear in Table 2. A full list appears in the Appendix.
Abstract model
In the abstract model, the decision and distribution steps are exactly as described in “Basics”. Regarding inter-group dynamics, groups pair up (Fig. 1, a3) and engage in conflict with probability pcon. Groups with higher average fitness are more likely to win (Fig. 1, a4). Following Bowles, we set pcon to approximately one conflict every four agent lifetimes (Bowles 2001).
Then, in the migration step, individual agents pair up and switch groups with probability pmig (Fig. 1, a5).
As for the (individual) selection phase, a fixed number of agents survive and reproduce every round, chosen probabilistically according to their fitness (Fig. 1, a6).
Naturalistic model
In contrast to the abstract model, the naturalistic model locates groups on a spatial grid. The spatial aspect causes groups to compete by encroaching on each other’s foraging grounds, obviating the need for a direct conflict component (Fig. 1).
Decision
In addition to the decision on whether to cooperate (see “Decision” in “Basics”), agents also decide where to forage (Fig. 1, n1), knowing that the more foragers there are on a square, the lower their payoff (due to competition described in “Inter-group dynamics”). An agent calculates the expected payoff of foraging on their home square compared to that of foraging on a randomly chosen adjacent square and chooses where to go with probabilities proportional to these payoffs (there is an additional “cost of foraging on distant lands,” cdist so even if one’s home square is more crowded, it may still pay to stay put).
Distribution
The only addition to what is described above is that an agent’s payoff is scaled by the number of agents foraging on the grid square. That is, both the private and public benefit generated by an agent are divided by nhere, the number of foragers on that agent’s square.
Inter-group dynamics
In this model, groups compete for resources without direct conflict. Groups grow when their members have high fitness (“Selection”), leading to crowding, so there is a mechanism by which a new group can bud off an old group (Fig. 1, n6). Recall that agents need not necessarily forage on their group’s home square (“Decision”). Generally, when they forage on another square, they remain tied to their group. However, if at least n agents from a group are foraging on a square other than their home, and they make up the plurality of agents on that square, then they start a new group on that square if none is already there. In this manner, populous groups can spread across the landscape. Because the benefit derived from foraging is inversely proportional to the number of agents present, these new groups begin to compete for the resources of pre-existing groups. Groups that make the most of available resources (the cooperative ones) are therefore expected to out-compete the others. Finally, if an agent is foraging away from their group’s home square, and there happens to be another group on their current square, they may migrate to that group with probability pmig (Fig. 1, n2).
Selection
In this model, there are costs of surviving and costs of reproducing. An agent’s ability to pay the cost of surviving (resp. reproducing) determines whether they survive (resp. reproduce), as shown in Fig. 1, n5. For a group to grow, it must have a significant proportion of agents with high enough fitness to pay both costs. Thus, high group-average fitness leads to growth, in contrast to the abstract model, where group size is constant and high group-average fitness leads to an advantage in direct conflict.
Results
Despite all the differences in implementation between the abstract and naturalistic models, both models exhibited remarkably similar results. In what follows, we will flag qualitatively different results with a difference annotation. Further, whenever there is a figure that is specific to one of the models, the Appendix contains the counterpart for the other model. In both models,
-
1. Norm internalizers (NIs) made up a small minority of the population. In fact, for the parameter settings under which they made the biggest difference in cooperation levels, they constituted an average of 10% of the population.
-
2. NIs had bouts of high cooperation that were significantly shorter than those of the other agents (though they did go higher).
-
3. The presence of NIs did not lead to higher levels of cooperation in groups in which they were more common.
Yet, we found that for mid-range benefit-to-cost ratios, the norm internalizer condition had
-
1. Higher levels of cooperation.
-
2. Longer peaks of above-average cooperation.
-
3. Fewer long bouts of below-average cooperation (though this held only in the naturalistic model).
To shed light on this counterintuitive result, we show that norm internalizers:
-
1. Polarize groups either to extreme cooperation or extreme defection, perhaps enhancing group selective forces that favor cooperative groups
-
2. Tend to be the ones to catalyze bouts of above-average cooperation in all agents—not just other NIs—when cooperation is especially low (this result was stronger in the naturalistic model).
-
3. Help to stabilize high levels of cooperation, keeping peaks high for longer.
Average cooperation in each condition
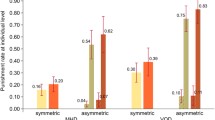
The presence of norm internalizers (NIs) in the strategy space (the NI condition) either increased the mean levels of cooperation or made no difference. In Fig. 2, we show the range of benefit-to-cost (b:c) ratios for which the presence of NIs did make a difference: the mid-range. That is, there is a low range of b:c ratios for which surplus cooperation is essentially zero (surplus cooperation is the amount of cooperation above the 5% error rate), and a high range for which relatively high cooperation levels emerge, regardless of whether NIs are present. But for ratios in between those extremes—from at least 3–3.5 in the naturalistic model and 3.25–3.5 in the abstract model—NIs made a significant difference. In the majority of these mid-range conditions, their presence at least doubled the surplus cooperation.

Levels of cooperation for various model conditions. Shown are the mid-range benefit-to-cost ratios (e.g., 3.0, 3.25, etc.) for which the norm internalizer condition (NI cond.), that is, the condition in which norm internalizers (NIs) were in the strategy space, had significantly higher level of cooperation. For benefit-to-cost ratios above or below the ones shown, the NI condition did not have significantly different cooperation levels. Some observations to note are (1) whenever the NI condition had significantly different levels of cooperation, it was always higher. (2) NIs did not necessarily cooperate more than non-NIs; in fact, in the naturalistic model, NIs made the biggest difference in cooperation levels when they cooperated about equally with everyone else. (3) As the benefit-to-cost ratio rises, the level of NI cooperation rises comparatively to non-NIs. (4) The fall-off in cooperation with increasing migration rates is less steep in the NI condition—in fact, in the abstract model, there is no fall-off at all. In all figures, except where the axes indicate otherwise, we use the default parameter set, b/c = 3.5, pmig = 0.2 for the abstract model, and b/c = 3.25, pmig = 0.5 for the naturalistic model (these two migration rates end up being equivalent at about a 50% lifetime migration rate); see the Appendix for more justification. The error bars are 95% confidence intervals (t-test), shown only for the total cooperation in each of the two conditions. (*), (**), and (***), respectively, indicate the difference between the NI and non-NI condition and are different with p < 0.01, p < 0.001, and p < 0.0001 (two- tailed t-test)
Despite their tendency to boost cooperation, NIs did not necessarily cooperate more than other agent types. Even if they did, most of the boost in average cooperation was due to NIs catalyzing high cooperation among other agent types: in Fig. 2, the majority of the difference in total cooperation in the NI condition (medium dots) and the non-NI condition (dark dots) is accounted for by the rise in cooperation of non-NIs.
In fact, in the naturalistic model, the NI condition boosted cooperation even when NIs tended to cooperate less than other agent types (with b/c = 3), and the NI condition made the most difference when NIs cooperated about equally (b/c = 3.5). In the abstract model, however, NIs always cooperated more on average than their counterparts (one notable difference between the models). That said, both models share the characteristic that NIs had a higher variance in their cooperation levels, which can be seen in Fig. 3A.

Norm internalizer cooperation and population. A Histogram showing the density of cooperation percentages of norm internalizers (NIs) vs non-NIs. NI cooperation tends to be more dispersed in intermediate benefit-to-cost regimes. The naturalistic model exhibits a similar pattern. B The average population share of NI across rounds, in the naturalistic and abstract models. For reference, NIs made the biggest difference in cooperation at 3.25 in the naturalistic model and 3.5 in the abstract model. The diamonds are the means. The 95% confidence intervals for the median are represented by notches on the box plot, which are so small as to be invisible. Parameters used are the default set, except for where b/c is otherwise specified
The drop-off in the NI’s ability to catalyze cooperation for larger b:c ratios likely has to do with.
the drop in their population as b:c rises. This is because, as b:c rises, the extent to which NIs cooperate disproportionately also grows (see the light dots in Fig. 2). This causes their population to take a hit (see Fig. 3B). With that said, at no b:c did NIs make up a majority of the population (averaged across rounds). In fact, their population was only around 10% for the ratios at which they were most effective at bringing about higher levels of cooperation (3.25 in the naturalistic model and 3.5 in the abstract model).
Shape of cooperation in each condition
The average only tells part of the story; however, especially because in our simulations, levels of cooperation tended to rise and fall cyclically. Two factors, therefore, could have increased the average: either the NI condition had relatively longer peaks (compared to its troughs) or it had higher average peak (and/or trough) cooperation levels.
As can be seen in Fig. 4 (on the right), the NI condition exhibited both properties. That is, the peaks were longer, and they had higher levels of cooperation. Further, a larger portion of the round was spent in the peak, but this difference was not significant. We define a peak as an interval in which cooperation is above average for at least ten rounds, and a trough as the complement of that. This result stands in contrast to the cooperation peaks of the NIs themselves (at left). NI cooperation peaks, while occupying about the same proportion of the round, were much shorter. And while NIs cooperated more on their peaks, they cooperated less in their troughs, which meant that NIs cooperated barely (and certainly not significantly) more than non-NIs overall (difference: in the abstract model, NIs did cooperate more).

Spike-trough comparison for the naturalistic model. Comparisons of the lengths and cooperation means of peaks and troughs. Peaks are defined as intervals of at least ten rounds in which cooperation is above average; troughs are the complement of that. At left, we compare between cooperation peaks of norm internalizers and cooperation peaks of other agent types, all within the norm internalizer condition. At right, we compare between the NI condition (NIs are in the strategy space) and the non-NI condition. Though the peaks of norm internalizers are shorter (top left), the peaks in the norm internalizer condition are longer (top right). And though the trough cooperation of norm internalizers is slightly lower (bottom left), the trough cooperation levels in the norm internalizer condition are higher (bottom right). Error bars are 99% confidence intervals (z-test), and both cooperation means and lengths are significantly different at that level. Parameters are the default set
The roles of norm internalizers
We are left, then, with a puzzle. NIs themselves do not exhibit longer peaks of cooperation, nor do they necessarily cooperate more on average than other types of agents. The presence of NIs in the population must, therefore, contribute to longer peaks and higher cooperation levels indirectly. Indeed, as the rest of this section shows, NIs play three vital roles in facilitating cooperation.
Polarize
The central role of the norm internalizer is that of polarization. High levels of NIs in a group caused cooperation to cluster at the extremes: either very low or very high. This makes sense: when cooperation is high, NIs internalize the tendency to cooperate, further increasing cooperation levels. The opposite is true at low levels of cooperation. We address in the discussion the intimate connection that polarization has with catalysis and stabilization (Sects. 5.3 and 5.4).
Polarization provides the first hint as to why NIs themselves do not have higher average cooperation levels: norm internalizers exhibit more extreme, not necessarily more cooperative behavior. Indeed, Fig. 5 shows that higher populations of norm internalizers in a group do not increase the mean level of cooperation. This effect that high norm internalizer populations do not imply higher cooperation—is the converse of the phenomenon observed earlier —that higher cooperation does not imply higher norm internalizer populations (Fig. 3B).

Polarization due to norm internalizers. A Scatterplot of cooperation levels of individual groups at difference norm internalizer frequencies in the naturalistic model. The bars are the average cooperation levels for each window. The frequency of norm internalizers does not increase mean cooperation (in fact, there is a mild decrease) but it does polarize cooperation. B The percentage of groups with cooperation levels below 80% that also has cooperation levels under 20%. Error bars are 99.9% confidence intervals (z-test); parameters are the default set
Catalyze
The second role of the norm internalizer is its ability to catalyze cooperation, allowing it to bootstrap itself from extremely low starting points. This role was much more pronounced in the naturalistic than the abstract model (an important difference between the models). We will propose reasons for why this might be so in “Catalyze” in “Discussion”; for now, we focus on the evidence from the naturalistic model. As can be seen in Fig. 6, there are more long troughs in the non-NI condition. For the NI condition, if a point is in a trough, there is a 3% probability that it is a trough of more than 3000 rounds, while for the non-NI condition, that number is 33%. We sought to elucidate this result by looking at which agent type initiated cooperation spikes— that is, the agent type that exceeded its mean cooperation level first. This result is plotted in Fig. 6D and E, which shows that for both longer and deeper troughs, NIs played a disproportionate role in initiating subsequent spikes. This helped prevent the NI condition runs from getting stuck in very long troughs.

Troughs’ characteristics in the naturalistic model. A, B The intervals of above-average cooperation (the spikes) are shown as dark lines for each of the simulation runs. While trough lengths for the NI condition (right) are, on average, slightly longer, it is clear that the non-NI condition (left) has a fatter tail of very long troughs, which can be observed more quantitatively in C. This histogram plots the probability of being in a trough of various lengths, given that one is in a trough (longer troughs therefore have higher weight since a randomly sampled round is more likely to be in a long than a short trough). D, E Plot the share of cooperation spikes initiated by norm internalizers after troughs of various lengths and depths, showing that norm internalizers tend to initiate the spikes that follow especially long and low troughs. Figures use default parameters. The abstract model does not exhibit this pattern
A useful way to examine this phenomenon is with a state transition diagram as shown in Fig. 7. While the transitions between these particular states are not technically Markovian, they nonetheless show the likely successor for each state. There are two things to observe here. First, the most stable states (the ones with the greatest proportion of self-loops) are those with very low cooperation (top left) and those with above average cooperation of both NIs and non-NIs (bottom right). Effective “catalysis” of cooperation, then, corresponds to moving from the top left to the bottom right. Notice that, in the naturalistic model, one of the most likely paths that achieves this is the one from very low cooperation (upper left) to high-NI cooperation (top right) to high cooperation for all agents (bottom right). All other two- or three-step paths have a much lower probability. The advantage of this path is much less pronounced in the abstract model (left), which is consistent with our observation that NIs do not play as much of a catalyst role in that setting.

Transitions in the naturalistic (left) and abstract (right) models. Both diagrams represent state transitions in the norm internalizer (NI) condition. The vertical axis shows L(ow)/H(igh) cooperation of non-NIs; the horizontal axis L/H cooperation for NIs. The top left circles represent low cooperation for both, in the special case when the cooperation is more than half a standard deviation below the mean. The arrows shown are the top two outgoing arrows for each node, or all arrows above 5%, whichever set is larger. Circle sizes, along with the percentage listed inside, represent the share of rounds spent in each state; circle tint, along with the percentage listed outside, represents the percent`age of self-loops. Each round in the naturalistic (abstract) model is divided into disjoint segments of 25 (10) rounds; transition probabilities are calculated from one window to the next. Default parameters were used
Stabilize
While the catalyst role was much stronger in the naturalistic model, the third, stabilizing type of effect that NIs had on high levels of cooperation (reflected in the longer peak lengths in the NI condition, along with the higher average levels of cooperation) was strongly present in both. This may seem counter-intuitive, because the peaks of NIs themselves are shorter than those of other agents. The key point, however, is that when the NI population is higher than average, cooperation peaks among all agent types, not just NIs, tend to be maintained (right side of Fig. 4).
We examine this effect by zeroing in on individual groups and their cooperation patterns. In particular, we first examine the regression coefficient between past and future levels of cooperation in high-NI vs. low-NI groups. We found that the coefficient is much closer to 1 in high-NI groups, which implies a much better sticking power of cooperation (see Fig. 8). We also examined state transitions between low (< 50%) and high (> 50%) cooperation, finding that a high level of NIs was much more effective at maintaining high cooperation levels: 96% of the time, high cooperation groups stayed high in high-NI groups, but only 76% of the time in low-NI groups (see Fig. 9A). While high populations of NIs are effective at maintaining high levels of cooperation, it is also true that high levels of cooperation lead to a decline in their population (see Fig. 9B). A Granger causality test of the effect of cooperation levels on norm internalizer population supported this observation: with very high confidence (p < 0.0001), high cooperation levels Granger-caused lower subsequent NI populations. This echoes the tendency for NI populations to fall at higher b:c ratios (Fig. 3B), when cooperation levels tend to be higher. Furthermore, while NIs tended to help high cooperation groups stay high, they also had a small but significant role in keeping low (under 50%) cooperation groups low (see Fig. 9A). We will discuss the apparent tension between this fact and the catalyst role of norm internalization in Sect. 5.3.

Norm internalizers as stabilizers. Both figures show the level of cooperation in a given round vs. five rounds earlier, for high-NI (> 20%) (A) and low-NI (< 20%) (B) groups in the abstract model. The best-fit (dark) is much closer to the slope-1 line (light) in high-NI groups, with coefficients of 0.91 (± 0.0015) vs 0.97 (± 0.003), respectively (and approximately equal constants). This may not seem like a huge difference, but iterating a cooperation level of 1 through this linear function requires 82 cycles to fall below 1 in high-NI case, while in the low-NI case, it only requires 8 cycles. Default parameters were used; confidence intervals are 95% two-tailed t-test. Equivalent figures for the naturalistic model show the same pattern

Norm internalizers (NIs) as stabilizers and their shortcoming. A The probability of transitioning from a state of high (> 50%) to low (< 50%) cooperation for groups that have high (> 20%) or low (< 20%) proportions of NIs, in the abstract model. High-NI groups maintain high cooperation dramatically better than low-NI groups (though they have a slightly harder time going from low to high cooperation). B The flaw: here we plot the difference in NI- population at different cooperation levels in the abstract model. Norm internalizer populations tend to fall when cooperation gets high. Both figures show error bars and confidence intervals of 99.9% (z-test) and default parameters. Equivalent figures of the naturalistic model show the same pattern
Discussion
The previous section highlighted the evidence for the roles that norm internalizers (NIs) played in raising average levels of cooperation. Here, we offer mechanistic explanations (or hypotheses) and ease some of the apparent tensions between the three roles.
Overall effect
First, we examine the overall effect of NIs on cooperation levels: when they were present in the strategy space—not necessarily when their population was larger— they tended to boost cooperation levels (Fig. 2). This is consistent with the result that when selection on a trait depended on Darwinian fitness (as the helping trait does in our model), unbiased imitation can help increase cooperation levels (Lehmann et al. 2008a). The difference is, in our model, norm internalization is not an exogenous given but an evolving trait that can go extinct. In this latter respect, our work is similar to Lehmann and Feldman (2008), though we obtained different results likely because their model included neither persistent groups (they reshuffled every round) nor punishment. For NIs to have any effect in our model, both of these mechanisms were required. This echoes Gavrilets and Richerson’s finding about non-conformist NIs (Gavrilets and Richerson 2017); they, too, had a much higher effect on behavior in the presence of punishment.
Furthermore, most of that boost came not from NIs own higher cooperation, but from increased cooperation levels of other agents: even if NIs did cooperate more than other agents (which was not always the case), it only made a small difference in the overall mean since their population was so small. Importantly, the three roles of NIs discussed earlier do not require higher long-term average levels of cooperation among NIs: instead, they effectively carry other agents along. As catalysts and stabilizers, NIs raised or maintained cooperation levels of other agents. And as polarizers, they adopted (a more extreme version of) whatever agents in their group were already doing.
How do NIs carry other agents along? In our model, there is a basic mechanism accomplishing this. Those caught defecting are punished by an indirect reciprocity mechanism: the group benefit of cooperation is withheld from them. Notice that the group benefit increases as the number of cooperators in the group increases, so it becomes more and more costly to defect as cooperation becomes more common. This increasing cost of defection causes other agents to cooperate more often as cooperation becomes more common, even if they are not NIs. However, while the payoff difference between cooperation and defection decreases when cooperation becomes common, the individual payoff of cooperating rarely, if ever, exceeds the cost of defection. This contrasts with the structure of a stag hunt game, in which it pays to simply adopt the majority strategy.
Population-cooperation tradeoff
An important factor in the ability of the NI condition to catalyze cooperation is the tradeoff between population and cooperation level. The NI population has to be high enough to make a difference, but that is not enough: it is of no help for them to constitute a third of the population if their cooperation level is kept down as a result of internalizing the norm of defection (this is what happened, for instance, at a benefit-to-cost ratio (b:c) of 3.0 in the abstract model). But—and here is the catch—the more NIs cooperate, the more their population falls (Fig. 9). Thus, to raise cooperation levels, NIs must cooperate, but so much that their population falls. The presence of this tradeoff explains why NIs are most effective with mid-range b:c ratios: if b:c is too high, NIs cooperate too much, leading their population to diminish. If it is too low, NIs never internalize the norm of cooperating, so their numbers can grow to make up about a third of the population without helping to spark cooperation (see Fig. 3). These fluctuating population dynamics are in stark contrast to the results of Gavrilets and Richerson, who observe a more or less stable level of norm internalizers once the trait has caught on (Gavrilets and Richerson 2017). This is no surprise, as their version of norm internalization is not a conformist one, and should therefore be less sensitive to the population distribution of other cooperators.
The mid-range is especially important as the region where cooperation is possible, but the hardest to maintain. One may of course ask, is the added cognitive machinery required for the norm internalization strategy worth the cost if all it does is lower the threshold for appreciable amounts of cooperation to a lower b:c ratio? The answer is quite possibly yes, especially because the machinery required to imitate the behaviors of others may have already existed for copying beneficial behaviors, and could have been co-opted at minimal cost (see, e.g., Henrich and Boyd 1998; Gintis 2003). While the naturalistic and abstract model yielded largely similar results, there were some differences, including two major qualitative differences. First, in the abstract model, norm internalizers always cooperated more than others, while in the naturalistic model, it depended very much on the b:c ratio. Second, the NI condition in the abstract model actually saw increasing or flat cooperation levels as migration rates increased, compared with declining ones in the spatial model. While we cannot say definitively what caused these differences, it makes sense that migration had different effects in the two models, as the spatial structure of the naturalistic model meant that only agents from neighboring groups mixed, while in the abstract model, the mixing was uniform.
We next discuss the three roles played by norm internalizers.
Polarize
We mentioned in Sect. 2.3 that between-group differences are necessary for group selection to be strong. Norm internalization, by polarizing groups, increases between-group differences, which in turn can enhance selection in favor of cooperation. Our result is thus in line with previous results on conformist transmission enhancing inter-group differences (Henrich 2004).
There may seem to be a tension between two findings: high-NI groups do not have higher average cooperation (Fig. 5), but nevertheless, the NI condition has higher cooperation than the non-NI condition. However, even though NIs may have an ambiguous effect on intra-group cooperation, the differences they cause between groups can enhance group selection in favor of cooperation. We will discuss in the next Sect. (5.3) how the inter-group dynamics resulting from polarization could lead to catalysis, and then in the following one, (5.4), how the intra-group effects of polarization can lead to stabilization. Hence, polarization is the central role whose different manifestations help give rise to the others.
Catalyze
In their role as catalyst, NIs helped to spark spikes in cooperation when cooperation levels were especially low. In this section, we propose a mechanism by which this might have occurred, resolve apparent tensions between this function and the other two, and provide hypotheses for why this role was less salient in the abstract model.
As can be seen in Fig. 9, NIs face no selective disadvantage at low levels of cooperation. This means that when cooperation is very low, their population can grow quite large, by drift. Of course, we know that a large NI population is not sufficient to bring about cooperation, as they can internalize a defection norm. So why might this population start cooperating? The answer is that even in global states of low cooperation, there will be variation between groups: some will cooperate more, others less. And crucially—due to the polarizing tendency (here is the promised link between polarization and catalysis), and the higher variability of NI cooperation (Fig. 3)—the groups with unusually high or unusually low cooperation will probably be the ones with more NIs. Especially in environments where cooperation is globally very low, the higher variance caused by NIs is needed to produce higher cooperation groups. These groups are favored by group selection, and their spread is what brings about a global spike in cooperation. Notice that catalysis is thus a result of the inter-group dynamics resulting from polarization.
Why, then, was catalysis less pronounced in the abstract model? The catalysis mechanism that we propose requires simultaneous inter-group variation: in the same round, there must be some higher and some lower cooperation groups. This may be much easier to achieve when there is spatial structure: the high migration rates means that groups mix quite quickly, but the spatial structure in the naturalistic model allows for geographically structured inter-group variation that is not possible in the abstract model.
This proposed mechanism helps to resolve apparent tensions between the catalyst role and the other two. One might wonder, in particular, how NIs can be catalysts of cooperation when Fig. 9A, demonstrating stabilization, shows that it is harder for high-NI groups to go from low cooperation to high cooperation (due to the polarizing tendency of norm internalization bringing groups under 50% cooperation closer to zero). The key insight is that the figure shows the intra-group effect of NIs: our proposed mechanism recognizes that intra-group, NIs have an ambiguous effect on cooperation, and it is only when we consider the inter-group variation, along with group selection favoring cooperative groups, that the catalyst effect can work.
Stabilize
The stabilizing mechanism is more intuitive, and has two parts. First, when NIs are present in larger quantities, and cooperation is high, they will be internalizing the cooperation norm—this is simply the positive side of the polarization phenomenon. This will further increase the levels of cooperation, causing the peaks of high cooperation to stick longer. Second, as described earlier, the increases in NI cooperation can raise defection costs, causing other agents to cooperate more. Note that the mechanism proposed here is the result of the intra-group consequences of polarization. This stabilization effect is in line with Henrich and Muthukrishna’s idea that group selection is greatly aided by intra-group dynamics that help to maintain a particular state (in this case, high cooperation) (Henrich and Muthukrishna 2021).
Why, given the positive-feedback dynamics described so far, doesn’t cooperation persist indefinitely? The answer is that the positive feedback loop is embedded in a larger negative feedback loop. It is true that high cooperation leads to more internalization of cooperation and a higher cost of defection, which in turn lead to more cooperation, but high cooperation levels also tend to reduce the population of NIs, as seen in Fig. 9 (the same effect leads to a reduction in NI population with rising b:c, as described in Sect. 5.1.1). This is because when cooperation levels are very high, NIs become unconditional cooperators, and cooperate much more than other agent types, leading to a reduction in their population. This results in a subsequent reduction in cooperation levels, but if cooperation levels get too low, NI populations can rise once more, setting off the positive feedback of cooperation again.
The cyclical dynamics can also help explain how NIs prolong overall peak durations while having shorter peaks themselves. When NI cooperation levels rise, they bring the cooperation of other agents up, too. However, in groups where cooperation gets too high, norm internalizer populations tend to die off; globally, this has the effect of killing the highly cooperative NIs and preserving the non-cooperative NIs, which reduces the NI cooperation average, ending the NI cooperation peak. However, cooperation levels of other agent types, which had grown in response to an increasing cost of defection, remain high because their own high cooperation levels maintain that high cost of defection—so the cooperation peak of other agents persists. When it eventually does fall enough (though remaining relatively high), it opens the door for norm internalizer populations to rise again and possibly starts to bring cooperation levels back up. In this way, NI cooperation can spike when it is needed to preserve a peak of non-NI cooperation, but it does not necessarily remain high for the entire non-NI peak, thereby increasing peak lengths even though its own peak lengths are comparatively short.
Cultural evolution
So far, we discussed the immediate effects of norm internalization on cooperation dynamics. But there is also a broader consequence to its effects, namely, that it forms part of the basis for cultural evolution. Under genetic evolution, transmission occurs from parent to offspring, with variation introduced by mutation and recombination. Cultural evolution, in comparison, requires that individuals in a society imitate others, for example, through conformist transmission.
Existing explanations for conformist transmission (Gintis 2003) do not explain why individuals would copy obviously self-sacrificial behaviors (see Sect. 2.2), short of “myopia” or inability to tell the difference. The present research provides an alternative explanation for conformist transmission in these hard-to-explain cases. Here, group selection plays an important role, amplified by the ability of norm internalization to increase differences between groups. Our research, therefore, helps elucidate why humans did not evolve into the fabled Homo economicus (Henrich et al. 2001), and provides grounding for a broader theory of cultural transmission of altruistic and moral behaviors.
Conclusion
In this paper, we looked at how the presence of norm internalization in the strategy space was able to increase cooperation levels, beyond what group selection and punishment by indirect reciprocity were able to do alone. This was so even though norm internalizers (NIs) tended to make up a small portion of the population, and they did not necessarily cooperate more than other agent types. We were motivated by the question of whether NIs might be able to fill in the gap by a certain proportion of actions (about half) being unobserved and, therefore, unpunished. The answer was yes, but their effect was mostly indirect: a minority of NIs increased the level of cooperation of all strategies. This accords with our intuitions about the role of conscience—conscience is essentially norm internalization paired with emotions like guilt and shame to enforce norm-following “from the inside”. Our intuition suggests that a conscience-like mechanism could help fill the gap when punishment is imperfect, and indeed, our results bear that out.
We identified three related roles that NIs played: they polarized groups, strengthening group selective forces in favor of cooperation, they catalyzed cooperation when global levels were especially low, and they stabilized bouts of high cooperation, keeping them going for longer. We showed these roles in action, and in Sect. 5, we proposed some more mechanistic explanations for each. Polarization was the hub role, which led to catalysis through inter-group dynamics and stabilization through intra-group dynamics.
For our inter-group dynamics, we used a wide range of migration parameters and, where required, empirically backed conflict parameters. We did not address the question of how punishment by indirect reciprocity might remain stable; for this, see (Ohtsuki and Iwasa 2006; Odouard and Price 2023). Importantly, we tested the effect of NIs over and above the effects of group selection and punishment, by looking at two conditions: one in which NIs were present in the strategy space and one in which they were not. Given that both these forces are at play, a strategy space that includes norm internalization yields higher cooperation than a strategy space that only has unconditional cooperators, and it can do so when both cooperation and norm internalization start out rare. As we have shown, they remain relatively uncommon, yet facilitate a dynamic that leads other agents to cooperate more and for longer.
Our work may be extended in several promising directions:
-
Morality consists of much more than just cooperation in public goods games. Coordination games, hawk-dove games, and stag hunts all play into morality (Curry 2016; Curry et al. 2019). Further exploration might aim to understand the effects that norm internalization would have in each of these diverse contexts.
-
While we used a continuous strategy space, it was still restricted to strategies that employed a particular function of certain input variables. Allowing for strategy optimization, for instance, by making the agents capable of reinforcement learning, is a particularly interesting direction for future work.
Data availability
The datasets generated and analyzed during the current study are available on Google Drive at https://drive.google.com/drive/folders/191NgPRAGVb0q4hbv9BUPXqfh7lSLAKpv?usp=sharing. Furthermore, the full codebase for the models, including the code we used to analyze the data, can be found at https://github.com/victorvikram/norm-internalization-and-coop.
Notes
Code and data at https://github.com/victorvikram/norm-internalization-and-coop
References
Axelrod R (1981) The emergence of cooperation among egoists. Am Polit Sci Rev 75:306–318. https://doi.org/10.2307/1961366
Axelrod R, Hamilton WD (1981) The evolution of cooperation. Science 211:1390–1396. https://doi.org/10.1126/science.7466396
Bhui R, Chudek M, Henrich J (2019) How exploitation launched human cooperation. Behav Ecol Sociobiol 73:78. https://doi.org/10.1007/s00265-019-2667-y
Boehm C (2012) Moral origins: the evolution of virtue, altruism, and shame. Basic Books, New York
Bowles S (2001) Individual interactions, group conflicts, and the evolution of preferences. In: Dealey J, Ward L (eds) Social dynamics. The MIT Press, Cambridge, MA, pp 155–190
Bowles S, Choi JK, Hopfensitz A (2003) The co-evolution of individual behaviors and social institutions. J Theor Biol 223:135–147. https://doi.org/10.1016/S0022-5193(03)00060-2
Boyd R, Richerson PJ (1988) The evolution of reciprocity in sizable groups. J Theor Biol 132:337–356. https://doi.org/10.1016/S0022-5193(88)80219-4
Boyd R, Richerson PJ (1992) Punishment allows the evolution of cooperation (or anything else) in sizable groups. Ethol Sociobiol 13:171–195. https://doi.org/10.1016/0162-3095(92)90032-Y
Boyd R, Richerson PJ (2005) The origin and evolution of cultures. Oxford University Press, Oxford
Boyd R, Gintis H, Bowles S, Richerson PJ (2003) The evolution of altruistic punishment. Proc Natl Acad Sci USA 100:3531–3535. https://doi.org/10.1073/pnas.0630443100
Boyd R, Gintis H, Bowles S (2010) Coordinated punishment of defectors sustains cooperation and can proliferate when rare. Science 328:617–620. https://doi.org/10.1126/science.1183665
Brown JS, Sanderson MJ, Michod RE (1982) Evolution of social behavior by reciprocation. J Theor Biol 99:319–339. https://doi.org/10.1016/0022-5193(82)90008-X
Churchland PS (2020) Conscience: the origins of moral intuition. W.W. Norton & Company, New York
Curry OS (2016) Morality as cooperation: a problem-centred approach. In: Shackelford TK, Hansen RD (eds) The evolution of morality. Springer International Publishing, Cham, 27–51 https://doi.org/10.1007/978-3-319-19671-8 2
Curry OS, Mullins DA, Whitehouse H (2019) Is it good to cooperate? Testing the theory of morality-as-cooperation in 60 societies. Curr Anthropol 60:47–69. https://doi.org/10.1086/701478
Darwin C (2011) The descent of man, vol 1. Pacific Publishing Studio, Seattle, WA
Delton AW, Krasnow MM, Cosmides L, Tooby J (2011) Evolution of direct reciprocity under uncertainty can explain human generosity in one-shot encounters. Proc Natl Acad Sci USA 108:13335–13340. https://doi.org/10.1073/pnas.1102131108
Fehr E, Fischbacher U, Gächter S (2002) Strong reciprocity, human cooperation, and the enforcement of social norms. Hum Nat 13:1–25. https://doi.org/10.1007/s12110-002-1012-7
Fischbacher U, Föllmi-Heusi F (2013) Lies in disguise: an experimental study on cheating. J Eur Econ Assoc 11:525–547. https://doi.org/10.1111/jeea.12014
Frith CD, Metzinger T (2016) What’s the use of consciousness? In: Engel AK, Friston KJ, Kragic D (eds) The pragmatic turn. The MIT Press, Cambridge, MA, 193–214 https://doi.org/10.7551/mitpress/9780262034326.003.0012
Galan JM, Izquierdo LR (2005) Appearances can be deceiving: lessons learned re-implementing Axelrod’s ‘evolutionary approach to norms.’ J Artif Soc Soc Simul 8:2
Gavrilets S, Richerson PJ (2017) Collective action and the evolution of social norm internalization. Proc Natl Acad Sci USA 114:6068–6073. https://doi.org/10.1073/pnas.1703857114
Gintis H (2003) The hitchhiker’s guide to altruism: Gene-culture coevolution, and the internalization of norms. J Theor Biol 220:407–418. https://doi.org/10.1006/jtbi.2003.3104
Grimm V, Revilla E, Berger U, Jeltsch F, Mooij WM, Railsback SF, Thulke HH, Weiner J, Wiegand T, DeAngelis DL (2005) Pattern-oriented modeling of agent-based complex systems: lessons from ecology. Science 310:987–991. https://doi.org/10.1126/science.1116681
Grusec JE, Goodnow JJ (1994) Impact of parental discipline methods on the child’s internalization of values: a reconceptualization of current points of view. Dev Psychol 30:4–19. https://doi.org/10.1037/0012-1649.30.1.4
Hamilton W (1964) The genetical evolution of social behaviour. I J Theor Biol 7:1–16. https://doi.org/10.1016/0022-5193(64)90038-4
Henrich J (2004) Cultural group selection, coevolutionary processes and large-scale cooperation. J Econ Behav Organ 53:3–35. https://doi.org/10.1016/S0167-2681(03)00094-5
Henrich J, Boyd R (1998) The evolution of conformist transmission and the emergence of between-group differences. Evol Hum Behav 19:215–241. https://doi.org/10.1016/S1090-5138(98)00018-X
Henrich J, Boyd R (2001) Why people punish defectors. J Theor Biol 208:79–89. https://doi.org/10.1006/jtbi.2000.2202
Henrich J, McElreath R (2003) The evolution of cultural evolution. Evol Anthropol 12:123–135. https://doi.org/10.1002/evan.10110
Henrich J, Muthukrishna M (2021) The origins and psychology of human cooperation. Annu Rev Psychol 72:207–240. https://doi.org/10.1146/annurev-psych-081920-042106
Henrich J, Boyd R, Bowles S, Camerer C, Fehr E, Gintis H, McElreath R (2001) In search of homo economicus: behavioral experiments in 15 small-scale societies. Am Econ Rev 91:73–78. https://doi.org/10.1257/aer.91.2.73
Henrich J, Henrich N (2014) Fairness without punishment: behavioral experiments in the Yasawa Island, Fiji. In: Ensminger J, Henrich J (eds) Experimenting with social norms: fairness and punishment in cross-cultural perspective. Russell Sage Press, New York
Hill KR, Walker RS, Bozˇicˇevic M, Eder J, Headland T, Hewlett B, Hurtado AM, Marlowe F, Wiessner P, Wood B (2011) Co-residence patterns in hunter-gatherer societies show unique human social structure. Science 331:1286–1289. https://doi.org/10.1126/science.1199071
Hirshleifer D, Rasmusen E (1989) Cooperation in a repeated prisoners’ dilemma with ostracism. J Econ Behav Organ 12:87–106. https://doi.org/10.1016/0167-2681(89)90078-4
Huberman BA, Glance NS (1993) Evolutionary games and computer simulations. Proc Natl Acad Sci USA 90:7716–7718. https://doi.org/10.1073/pnas.90.16.7716
Lehmann L, Feldman MW (2008) The co-evolution of culturally inherited altruistic helping and cultural transmission under random group formation. Theor Popul Biol 73:506–516. https://doi.org/10.1016/j.tpb.2008.02.004
Lehmann L, Feldman MW, Foster KR (2008a) Cultural transmission can inhibit the evolution of altruistic helping. Am Nat 172:12–24. https://doi.org/10.1086/587851
Lehmann L, Foster KR, Borenstein E, Feldman MW (2008b) Social and individual learning of helping in humans and other species. Trends Ecol Evol 23:664–671. https://doi.org/10.1016/j.tree.2008.07.012
Lorberbaum J (1994) No strategy is evolutionarily stable in the repeated prisoner’s dilemma. J Theor Biol 168:117–130. https://doi.org/10.1006/jtbi.1994.1092
Lozano P, Gavrilets S, Sánchez A (2020) Cooperation, social norm internalization, and hierarchical societies. Sci Rep 10:15359. https://doi.org/10.1038/s41598-020-71664-w
Maynard Smith J (1964) Group selection and kin selection. Nature 201:1145–1147. https://doi.org/10.1038/2011145a0
McElreath R, Boyd R, Richerson PJ (2003) Shared norms and the evolution of ethnic markers. Curr Anthropol 44:122–130. https://doi.org/10.1086/345689
Nowak MA (2006) Five rules for the evolution of cooperation. Science 314:1560–1563. https://doi.org/10.1126/science.1133755
Nowak MA, May RM (1992) Evolutionary games and spatial chaos. Nature 359:826–829. https://doi.org/10.1038/359826a0
Nowak MA, Sigmund K (2005) Evolution of indirect reciprocity. Nature 437:1291–1298. https://doi.org/10.1038/nature04131
Odouard VV, Price MH (2023) Tit for tattling: cooperation, communication, and how each could stabilize the other. Evol Hum Behav 44:359–372. https://doi.org/10.1016/j.evolhumbehav.2023.06.002
Ohtsuki H, Iwasa Y (2006) The leading eight: Social norms that can maintain cooperation by indirect reciprocity. J Theor Biol 239:435–444. https://doi.org/10.1016/j.jtbi.2005.08.008
Panchanathan K, Boyd R (2003) A tale of two defectors: the importance of standing for evolution of indirect reciprocity. J Theor Biol 224:115–126. https://doi.org/10.1016/S0022-5193(03)00154-1
Parsons T (1967) Sociological theory and modern society. Free Press, New York
Queller DC (1992) A general model for kin selection. Evolution 46:376–380. https://doi.org/10.1111/j.1558-5646.1992.tb02045.x
Schmidt MFH, Butler LP, Heinz J, Tomasello M (2016) Young children see a single action and infer a social norm: Promiscuous normativity in 3-year-olds. Psychol Sci 27:1360–1370. https://doi.org/10.1177/0956797616661182
Talhelm T, Zhang X, Oishi S, Shimin C, Duan D, Lan X, Kitayama S (2014) Large-scale psychological differences within china explained by rice versus wheat agriculture. Science 344:603–608. https://doi.org/10.1126/science.1246850
Tangney JP (2005) The self-conscious emotions: shame, guilt, embarrassment and pride. In: Dalgleish T, Power MJ (eds) Handbook of cognition and emotion. John Wiley & Sons, Hoboken, NJ, 541–568 https://doi.org/10.1002/0470013494.ch26
Trivers RL (1971) The evolution of reciprocal altruism. Q Rev Biol 46:35–57. https://doi.org/10.1086/406755
Wedekind C, Milinski M (2000) Cooperation through image scoring in humans. Science 288:850–852. https://doi.org/10.1126/science.288.5467.850
Wilson DS, Van Vugt M, O’Gorman R (2008) Multilevel selection theory and major evolutionary transitions: Implications for psychological science. Curr Dir Psychol Sci 17:6–9. https://doi.org/10.1111/j.1467-8721.2008.00538.x
Young HP (1998) Social norms and economic welfare. Eur Econ Rev 42:821–830. https://doi.org/10.1016/S0014-2921(97)00138-4
Acknowledgements
We would like to thank Michael Macy, Alex Vladimirsky, Michael Holton Price, Tyler Millhouse, and David Krakauer for their thoughts, ideas, and feedback; our anonymous reviewers, whose thorough comments allowed us to greatly improve the paper; and David Krakauer and the Santa Fe Institute, under whose auspices we were able to complete the last painstaking steps of this research.
Funding
This work is supported by a grant to SFI from the Omidyar Network to cover core research in the area of emergent political economy. David Krakauer is the PI on this award. The funders played no role in the design, execution, writing, and submission of this research.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare no competing interests.
Additional information
Communicated by M. Raymond
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary Information
Below is the link to the electronic supplementary material.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Odouard, V.V., Smirnova, D. & Edelman, S. Polarize, catalyze, and stabilize: how a minority of norm internalizers amplify group selection and punishment. Behav Ecol Sociobiol 77, 110 (2023). https://doi.org/10.1007/s00265-023-03380-0
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s00265-023-03380-0