
Abstract
Stress is now thought to be a major cause to a wide range of human health issues. However, many people may ignore their stress feelings and disregard to take action before serious physiological and mental disorders take place. The heart rate (HR) and blood pressure (BP) are the most physiological markers used in various studies to detect mental stress for a human, and because they are captured non-invasively using wearable sensors, these markers are recommended to provide information on a person’s mental state. Most stress assessment studies have been undertaken in a laboratory-based controlled environment. This paper proposes an approach to identify the mental stress of automotive drivers based on selected biosignals, namely, ECG, EMG, GSR, and respiration rate. In this study, six different machine learning models (KNN, SVM, DT, LR, RF, and MLP) have been used to classify between the stressed and relaxation states. Such system can be integrated with a Driver Assistance System (DAS). The proposed stress detection technique (SDT) consists of three main phases: (1) Biosignal Pre-processing, in which the signal is segmented and filtered. (2) Feature Extraction, in which some discriminate features are extracted from each biosignal to describe the mental state of the driver. (3) Classification. The results show that the RF classifier outperforms other techniques with a classification accuracy of 98.2%, sensitivity 97%, and specificity 100% using the drivedb dataset.
Similar content being viewed by others
1 Introduction
As per declared reports by the World Health Organization (WHO), around 1.3 million individuals lose their lives each year as a result of traffic accidents, which are the primary cause of death for children and young adults (5–29 years old) worldwide, causing a loss of about 3% of the gross domestic product (GDP) of most countries [1]. Additionally, according to the WHO, by 2030, road traffic accidents are expected to overtake all other causes of death to become the fifth leading cause of death [2, 3]. Stress is intimately linked to driving safety, especially in driving circumstances. For example, stress can cause road accidents by lowering a driver’s ability to make judgments in risky situations or compromising driving performance. As a result, various studies have been conducted to address the problem of identifying stress early in order to lower the risk of traffic accidents [4,5,6].
Over the last few decades, an increase in traffic accidents and fatalities has been attributed to an increase in driver drowsiness, exhaustion, and mental stress. To reduce human faults, some physiological parameters such as electrocardiogram (ECG), electromyogram (EMG), skin conductance (SC), also known as galvanic skin response (GSR), and respiration rate (RR) can be continuously measured in order to monitor the stress and alertness while driving [7, 8]. Skin conductivity and heart rate indicators are more directly associated with a driver’s stress level in the majority of cases.
Numerous measurements, which can be divided into three categories: physiological measurements, measurements of facial behavior, and measurements of vehicle motion, have been used to assess drivers’ levels of stress [9]. The most frequent vehicle motion-related attributes include acceleration, braking, lane position, steering angle, and handling movement patterns. These characteristics are straightforward to calculate, although they are influenced by the type of vehicle, driving habits, and road conditions. Facial activities, such as head movement, pupil dilation, blink rate, and eye gazing, can be measured without affecting driving [10,11,12,13]. These measures, however, may be unreliable in some scenarios, such as low illumination, severe weather, at night, or when a driver is wearing eyeglasses.
Physiological data, however, not usually affected by contextual factors unrelated to stress, such as lighting or driving technique. In addition, physiological signals obtained through body-worn technology can offer helpful details about a driver’s internal state, which can be utilized to identify stress [14, 15]. GSR signals linked to sweat gland activity associated with heart activity are frequently utilized as accurate stress indicators because the stress response is related to autonomic nervous system activity. In stress recognition, the focus is detecting and utilizing a variety of physiological signals from inexpensive and readily accessible sensors.
In driving scenarios, short-term monitoring is critical for driving safety. However, various stress detection studies relied on relatively long-term physiological signals, usually lasting several minutes [16, 17]. In some recent studies, short-term ECG signals with high sampling frequencies under stressful settings were frequently used [18, 19]. Although the use of short-term GSR signals is becoming more common, knowledge-based feature building in conjunction with traditional machine learning classifiers still takes a significant amount of time and human effort.
The aim of this paper is to develop a solution to detect mental stress for automotive drivers based on selected biosignals by using different machine learning (ML) techniques. Such system can be integrated with a Driver Assistance System (DAS), which can continuously probe the mental state of the driver. Also, it may provide a warning or take an action (e.g., playing relaxing music or turning on the favorite program) to relieve the stress state in order to increase safety. This work investigates the use of physiological signs: ECG, EMG, GSR, and respiration, to classify between the stressed and non-stressed states.
The proposed stress detection approach consists of three main phases. The first phase involves biosignal pre-processing, in which the signal is segmented and filtered. The second phase is the feature extraction phase, in which some discriminate features are extracted from each biosignal to describe the mental state of the driver. The third phase is stress detection. This work uses the k-nearest neighbor (KNN), support vector machines (SVM), random forest (RF), multilayer perceptron (MLP), decision tree (DT), and logistic regression (LR) classifiers to detect and classify the stress level.
The main contributions of this paper are summarized as follows:
-
An artificial intelligence-based Driver Assistance System (AI-DAS) is proposed to identify mental stress in automotive drivers using a group of physiological signals, which are easily captured from the driver. These signals are ECG, EMG, hand GSR, foot GSR, and respiration rate.
-
The proposed system employs three phases: pre-processing, feature extraction, and classification.
-
Ten statistical features are extracted from each 1-min segment of the involved signals and fed to the classifiers for identification.
-
Different ML classifiers are adopted to differentiate between stressed and relaxed states, including KNN, SVM, RF, MLP, DT, and LR. These classifiers showed the ability to detect the driver’s stress effectively with short training periods.
-
Grid-search technique was used to find the optimal hyperparameters of the classifiers.
-
The evaluation experiments have been performed, and the classification accuracy for the model is 98.2, sensitivity 97, and specificity 100% using the drivedb dataset.
The rest of the paper is organized as follows. After this introductory section, Sect. 2 is dedicated to the related work. Section 3 introduces the proposed strategy for identifying the stress state in car drivers. Section 4 presents the experimental results of the method on real-world driving experiences. Finally, Sect. 5 presents a conclusion of the study.
2 Related work
This section discusses a number of studies that have been conducted by researchers in the literature. The researchers used a combination of detection systems to capture mental and behavioral reactions in a social situation. Lin et al. [20] proposed a fuzzy-assisted Petri net technique for stress detection using HR and BP monitoring. They monitor the HR by the duration between two successive QRS complex in the ECG signal. BP is tracked by monitoring the transient time of each pulse. The method is based on the variance of HR and BP in the case of stress/non-stress states using time and frequency analysis. The fuzzy-assisted Petri net assessed the stress evaluation process. The accuracy, precision, and recall are 93.55, 89.01, and 89.50%, respectively.
Hu et al. [21] presented a heart rate variability (HRV) analysis to detect mental stress for automotive drivers. The study demonstrates a synchronization between the HRV, which identifies the rhythm pattern change of heart pulses, with the driver mental state. KNN algorithm is employed to distinguish HRV characteristics to detect the mental condition. They revealed that an accuracy of 93.7% was achieved with this technique.
Lee et al. [16] suggested a method to detect stress during driving using short-time physiological signals and convolutional neural networks (CNNs). HR and the GSR signals from the hand and foot are used to identify mental stress in drivers. CNNs are employed to extract discriminant features from the signals and identify the stressed and normal states. They applied the method and recorded its performance on 10 and 30 s signals. The classification accuracy reported was 92.33 and 95.67%, respectively.
Tang et al. [22] presented a study on the effect of different activities on the stress state. They measured the GSR signal and taken as an indication of the mental stress of a person. They also showed how activity data could enhance the sensitivity of stress detection in seated and standing positions. An accuracy of 94.7% from this system is achieved.
Mozos et al. [23] combined two sensor systems that record physiological and social reactions to provide a machine learning strategy for automatically detecting stress in humans in social situations. They used various classifiers, such as the SVM, AdaBoost, and KNN, to classify the stress state. The results show that when the signals from both sensors are combined, they can distinguish between stress and neutral situations. They also provided an assessment of each sensor separately for suitability for stress detection in real time.
To improve instant stress tracking, Giakoumis et al. [24] introduced behavioral parameters that are related to the operation and can be accessed instantaneously through a computer network. The proposed features are based on video and accelerometer data from the tracked subject areas. A stress-inducing approach based on Stroop color word test was used. Nineteen participants participated in the study, and biosignals (ECG and GSR) were collected from them, besides video and accelerometer data. Spatial–temporal features are extracted from video sequences, and an exploratory methodological investigation was conducted. They examined various activity-related behavioral features, potentially helpful for automatic stress detection. Results reveal that most of these features directly correlate with self-reported stress.
Numerous physiological markers have been investigated in the literature to detect stress. Table 1 summarizes the physiological signals involved with stress detection in previous studies.
3 The proposed stress detection technique (SDT)
This paper aims to develop an approach to detect mental stress for automotive drivers based on selected biosignals using different ML techniques. Such system can be integrated with a Driver Assistance System (DAS), which can continuously probe the mental state of the driver, and may provide a warning or take an action (e.g., playing relaxing music or turning on the favorite program) to relieve the stress state in order to increase safety [26, 29].
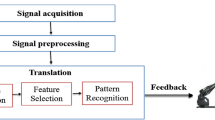
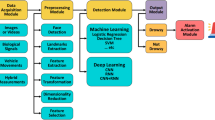
This work investigates the use of physiological signs: ECG, EMG, GSR, and respiration, to identify the stress and relaxation states. The proposed stress detection technique (SDT) consists of three main phases, which are: (1) Biosignal Pre-Processing: In which the signal is segmented and filtered. (2) Feature Extraction: In which some discriminate features are extracted from each biosignal to describe the mental state of the driver. (3) Classification: This work uses the KNN, SVM, DT, LR, RF, and MLP classifiers to detect and classify the stress level. Figure 1 shows the flow diagram of the proposed method for stress detection.

Overview of the proposed stress detection technique (SDT)
3.1 Biosignal pre-processing
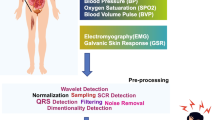
In pre-processing phase, the biosignals pass through three main steps, which are: (1) signal segmentation, (2) segment partitioning, and (3) filtering.
3.1.1 Signal segmentation
The first step of the SDT is to separate the driving periods which have different stressful events. In this step, each biosignal is subdivided into a number of time intervals. Each interval corresponds to a different driving condition. The marker signal, accompanied with each driver record, determines the time intervals of the periods of each driver. This marking signal is used to identify the start, end, and duration of each period. First, the peaks of the marker signals and their locations are identified. Then, these locations are used to divide the different signals of the driver into subintervals, each with a different stressful event. Figure 2 shows the marker signal of one driver, annotating peaks, and a sample of involved biosignals, which will be divided. Each driving period will be assigned a different stress level, as shown in Table 2.

Signal segmentation
After identifying each driving period, we can separate the biosignal segments corresponding to each period. This process is repeated for the five involved signals: ECG, EMG, fGSR, hGSR, and respiration. Table 3 displays the end samples of each driving period for different drivers.
Also, we can determine the time intervals (in minutes) for each driving period, from which we can identify the start and end times for each period. These time intervals can be computed (in minutes) by dividing the values of samples in the previous table by the sampling frequency (15.5 Hz) multiplied by 60. Table 4 shows the time intervals, in minutes, for the driving periods. The displayed values correspond to the end times for each period.
3.1.2 Segment partitioning
In this step, each driving segment (period) will be divided into small partitions, each with 1-min duration. The time points are taken 2 min after the start of each segment. This produces 555 partitions, each with 1-min duration, and each partition is either relaxed or stressed. These signal partitions will then be filtered and analyzed for the extraction of discriminant features that will subsequently be used to train and test the ML classifiers.
3.1.3 Filtering
The main objective of the filtering step is to remove noise and artifacts from the biosignals. Each biosignal in the dataset is subjected to a different type of noise. Therefore, each biosignal will be processed separately, as follows:
3.1.3.1 ECG filtering
Baseline wander is one of the main types of noise that may exist in an ECG signal [30]. It is a low-frequency artifact resulting from the movement and respiration of the subject [31, 32]. This noise can be removed by suppressing the low-frequency components (≤ 0.5 Hz) in the signal. In the proposed approach, the signal is firstly transformed from the time to the frequency domain using the fast Fourier transform (FFT). Then, we set the target frequency to 0.5 Hz, below which all frequency components will be removed by setting the range of values between 0 and 0.5 Hz to zero in the spectrum of the signal. After that, the processed signal is transformed back into the time domain using the inverse FFT (IFFT).
A signal in the time domain, \(x_{n} = \left\{ {x_{0} ,x_{1} ,{ }x_{2} ,{ } \ldots ,{ }x_{N - 1} } \right\}\), can be converted to the frequency domain, \(X_{k} = \left\{ {X_{0} ,X_{1} ,{ }X_{2} ,{ } \ldots ,{ }X_{N - 1} } \right\}\), using the formula in Eq. (1). The filtering process, which involves suppressing the frequency components below 0.5 Hz, is illustrated by Eq. (2).
where N is the number of samples.
Figure 3 displays the time and frequency domains for a sample of ECG signal before and after removing the baseline wander noise.

An ECG signal in time and frequency domains before and after filtering
3.1.3.2 fGSR and hGSR filtering
The GSR signals from the foot (fGSR) and hand (hGSR) are filtered by removing the DC component (the component with 0 Hz) from the signal [33]. Similar to the ECG signal, the fGSR and hGSR signals are converted to the frequency domain using FFT; then, the frequency component at 0 Hz is set to zero. After that, the signals are converted back to the time domain.
3.2 Feature extraction
This step involves the extraction of some discriminant features from each 1-min signal partition on which the ML models will be trained. In total, for every partition, ten statistical features are extracted, which are distributed over the five involved signals, such that two for ECG, three for fGSR, three for hGSR, one for EMG, and one for respiration. The description of extracted features is depicted in Table 5. The peak detection algorithm is applied to the filtered ECG, fGSR, and hGSR signals with the width between two consecutive peaks is set to 5, and prominence is set to 0.1.
This feature extraction procedure is repeated for all 555 signal partitions. Then, a standardization process from scikit-learn toolkit is applied on the features. Standardization involves removing the mean value of each feature, then scaling it by dividing features by their standard deviation [34]. After that, the data were further split into training and testing portions with a 70:30 ratio split. This results in producing 388 partitions for training and 167 partitions for testing. The training and testing portions are used to train and verify the performance of the models, respectively.
3.3 Classification
Some common machine learning algorithms are employed to classify the stressful state of automotive drivers based on the extracted features from their biosignals. The employed algorithms are KNN, SVM, DT, LR, RF, and MLP. The models in this study are implemented using the scikit-learn toolkit. The best structure and hyperparameters for classifiers are found using grid-search [35] in order to achieve the best performance from the models. Additionally, the trial-and-error method is used to calculate the optimum combinations of hyperparameters to avoid overfitting. Table 6 displays the optimal hyperparameters obtained for each model.
4 Experimental results
This section presents the evaluation results of the proposed system for stress detection. All the experiments of pre-processing, feature extraction, and classification are implemented with Python programming language and executed in a PC with Intel Core i3 (1.80 GHz) and 8 GB RAM.
4.1 Dataset description
This study uses the drivedb dataset acquired by Healey and Picard [28]. This dataset was collected for the purpose of determining a driver’s relative stress level using four physiological signals: ECG, EMG, skin conductivity (known as GSR), and respiration. The authors acquired the four signals during three periods of driving activity: rest, driving along a highway, and driving inside a city that were assumed to produce low, medium, and high levels of stress, respectively. The dataset, publicly available on PhysioNet [36, 37], contains data from 17 drivers. However, only the data of ten drivers are complete.
The records have durations of 65–93 min, split over driving periods with different stress events, as shown in Fig. 4. The start and end of each period are identified by the marker signal, provided along with the driver’s data. The sampling frequency of all signals is 15.5 Hz.

An ECG signal in time and frequency domains before and after filtering
In this study, the following signals, listed in Table 7, are used to classify the stress level of the drivers.
4.2 Evaluation metrics
The following metrics are used to evaluate the performance of the proposed SDT:
-
Classification Accuracy: It is the percentage of correctly identified instances as stressed/relaxed to the total number of instances.
$${\text{Classification Accuracy}} = \frac{{{\text{TP}} + {\text{TN}}}}{{{\text{TP}} + {\text{TN}} + {\text{FP}} + {\text{FN}}}}$$(3) -
Sensitivity (recall): It is the probability that all positive (stressed) instances are identified as positive.
$${\text{Sensitivity}} = \frac{{{\text{TP}}}}{{{\text{TP}} + {\text{FN}}}}$$(4) -
Specificity: It is the probability that all negative (relaxed) instances are identified as negative.
$${\text{Specificity}} = \frac{{{\text{TN}}}}{{{\text{TN}} + {\text{FP}}}}$$(5) -
Precision: It is the ratio of actual positive (stressed) instances to the total number of instances identified as positive by the model.
$${\text{Precision}} = \frac{{{\text{TP}}}}{{{\text{TP}} + {\text{FP}}}}$$(6) -
F1-Score: It combines the two metrics, precision and recall, into a single metric by taking the harmonic mean.
$$F1 - {\text{Score}} = 2 \frac{{{\text{Precision}} \times {\text{Recall}}}}{{{\text{Precision}} + {\text{Recall}}}}$$(7) -
Training Time: It is the amount of time (in seconds) each model takes to be trained using the same amount of data.
-
Permutation Importance: It is a measure of the importance of each feature in the classification process. It is computed as the difference between the evaluation score of the baseline model and the evaluation score when changing (permuting) each feature column, one at a time [38].
where TP (true positive) is the ratio of positive (stressed) instances identified as positive, FP (false positive) is the ratio of negative (relaxed) instances falsely identified as positive, TN (true negative) is the ratio of negative (relaxed) instances identified as negative, and FN (false negative) is the ratio of positive (stressed) instances falsely identified as negative by the classifier.
4.3 Evaluation results
This work employs the KNN, SVM, DT, LR, RF, and MLP models to identify the stress level and test the impact of applying each classifier. The overall results of training and testing each classifier based on the aforementioned evaluation metrics are shown in Table 8. In addition, Fig. 5 displays the confusion matrix for each classifier. The learning curves, which show the training and validation scores of a model with varying training sizes, and the progress of model accuracy with training time, with cross-validation (no. of splits = 5), are shown in Fig. 6a and b, respectively. Moreover, a comparison of ROC curves of adopted ML models is depicted in Fig. 7.

The confusion matrix for each classifier

a Accuracy vs. training size and b accuracy vs. training time, for each classifier

Comparison of ROC curves of classifiers
From the results in Table 8 and Figs. 5, 6, and 7, it is clear that the RF model performs better than other classifiers using the drivedb dataset with a classification accuracy of 98.2, sensitivity 97, and specificity 100%.
Figure 8 displays the permutation importance scores of each model, which explains the importance level of each feature. In this graph, the features appear in descending order, from top to bottom, based on their importance in the classification process. From these graphs, it is clear that feature_3 (Peaks_fGSR) and feature_9 (rms_EMG) are the most important features for all classification models, which contribute more in the classification process.


Permutation importance for each classifier, indicating the importance of each feature
Table 9 shows a comparison of the proposed and some related works in the literature for stress detection using the drivedb database. This comparison shows the superiority of the proposed system compared with other systems in the literature.
5 Conclusion
In this paper, we presented an AI-based Driver Assistance System (AI-DAS) that can automatically detect stress in automotive drivers. In the proposed method, the physiological signals ECG, EMG, fGSR, hGSR, and RR, which are easily captured using wearable sensors, are analyzed and processed. Such application requires fast processing to be able to track stress in car drivers. So, in order to maintain fast processing in the proposed solution, the filtering and feature extraction processes are performed over short periods (1 min) to ensure that the proposed solution is reliable in actual processing. Therefore, in real scenarios, a 1-min recording from signals is captured, filtered, and then, only ten statistical features are extracted from all the signals. Consequently, any stress states will be detected the minute after it is encountered. Different ML classifiers are adopted to differentiate between stressed and relaxed states using the publicly available drivedb dataset. The classifiers used in this study are KNN, SVM, DT, LR, RF, and MLP, which showed the ability to detect the driver’s stress effectively with short training times. Grid-search was used to find the optimal hyperparameters of the classifiers. The experimental results reveal that the RF classifier outperforms other techniques with a classification accuracy of 98.2%, which also has superior performance than other methods presented in earlier studies.
Data availability
Data will be made available on reasonable request.
References
World Health Organization Road traffic injuries. https://www.who.int/news-room/fact-sheets/detail/road-traffic-injuries. Accessed 11 Jul 2022
World Health Organization (2015) Global status report on road safety 2015. World Health Organization
World Health Organization, Others (2020) European regional status report on road safety 2019. World Health Organization Regional Office for Europe
Gedam S, Paul S (2021) A review on mental stress detection using wearable sensors and machine learning techniques. IEEE Access 9:84045–84066. https://doi.org/10.1109/ACCESS.2021.3085502
Chung W-Y, Chong T-W, Lee B-G (2019) Methods to detect and reduce driver stress: a review. Int J Automot Technol 20:1051–1063. https://doi.org/10.1007/s12239-019-0099-3
Giannakakis G, Grigoriadis D, Giannakaki K et al (2022) Review on psychological stress detection using biosignals. IEEE Trans Affect Comput 13:440–460. https://doi.org/10.1109/TAFFC.2019.2927337
Siam AI, Almaiah MA, Al-Zahrani A et al (2021) Secure health monitoring communication systems based on iot and cloud computing for medical emergency applications. Comput Intell Neurosci 2021:1–23. https://doi.org/10.1155/2021/8016525
Siam AI, Sedik A, El-Shafai W et al (2021) Biosignal classification for human identification based on convolutional neural networks. Int J Commun Syst. https://doi.org/10.1002/dac.4685
Alharbey R, Dessouky MM, Sedik A et al (2022) Fatigue state detection for tired persons in presence of driving periods. IEEE Access. https://doi.org/10.1109/ACCESS.2022.3185251
Bergasa LM, Nuevo J, Sotelo MA et al (2006) Real-time system for monitoring driver vigilance. IEEE Trans Intell Transp Syst 7:63–77. https://doi.org/10.1109/TITS.2006.869598
Faure V, Lobjois R, Benguigui N (2016) The effects of driving environment complexity and dual tasking on drivers’ mental workload and eye blink behavior. Transport Res F: Traffic Psychol Behav 40:78–90. https://doi.org/10.1016/j.trf.2016.04.007
Siam AI, Soliman NF, Algarni AD et al (2022) Deploying machine learning techniques for human emotion detection. Comput Intell Neurosci 2022:1–16. https://doi.org/10.1155/2022/8032673
Siam AI, El-Affendi MA, Elazm AA et al (2022) Portable and real-time IoT-based healthcare monitoring system for daily medical applications. IEEE Trans Comput Soc Syst. https://doi.org/10.1109/TCSS.2022.3207562
Dalmeida KM, Masala GL (2021) HRV features as viable physiological markers for stress detection using wearable devices. Sensors 21:2873. https://doi.org/10.3390/s21082873
Khan MQ, Lee S (2019) A comprehensive survey of driving monitoring and assistance systems. Sensors 19:2574. https://doi.org/10.3390/s19112574
Lee J, Lee H, Shin M (2021) Driving stress detection using multimodal convolutional neural networks with nonlinear representation of short-term physiological signals. Sensors 21:2381. https://doi.org/10.3390/s21072381
Jimenez-Limas MA, Ramirez-Fuentes CA, Tovar-Corona B, Garay-Jimenez LI (2018) Feature selection for stress level classification into a physiologycal signals set. In: 2018 15th International Conference on Electrical Engineering, Computing Science and Automatic Control (CCE). IEEE, pp 1–5
Zalabarria U, Irigoyen E, Martinez R et al (2020) A low-cost, portable solution for stress and relaxation estimation based on a real-time fuzzy algorithm. IEEE Access 8:74118–74128. https://doi.org/10.1109/ACCESS.2020.2988348
Chen L, Zhao Y, Ye P et al (2017) Detecting driving stress in physiological signals based on multimodal feature analysis and kernel classifiers. Expert Syst Appl 85:279–291. https://doi.org/10.1016/j.eswa.2017.01.040
Lin Q, Li T, Shakeel PM, Samuel RDJ (2021) Advanced artificial intelligence in heart rate and blood pressure monitoring for stress management. J Ambient Intell Humaniz Comput 12:3329–3340. https://doi.org/10.1007/s12652-020-02650-3
Hu D, Gao L (2022) Psychological stress level detection based on heartbeat mode. Appl Sci 12:1409. https://doi.org/10.3390/app12031409
Tang TB, Yeo LW, Lau DJH (2014) Activity awareness can improve continuous stress detection in galvanic skin response. In: IEEE SENSORS 2014 Proceedings. IEEE, pp 1980–1983
Mozos OM, Sandulescu V, Andrews S et al (2017) Stress detection using wearable physiological and sociometric sensors. Int J Neural Syst 27:1650041. https://doi.org/10.1142/S0129065716500416
Giakoumis D, Drosou A, Cipresso P et al (2012) Using activity-related behavioural features towards more effective automatic stress detection. PLoS ONE 7:e43571. https://doi.org/10.1371/journal.pone.0043571
Singh RR, Conjeti S, Banerjee R (2014) Assessment of driver stress from physiological signals collected under real-time semi-urban driving scenarios. Int J Comput Intell Syst 7:909. https://doi.org/10.1080/18756891.2013.864478
Rigas G, Katsis CD, Bougia P, Fotiadis DI (2008) A reasoning-based framework for car driver’s stress prediction. In: 2008 16th Mediterranean Conference on Control and Automation. IEEE, pp 627–632
Zhai J, Barreto A (2006) Stress detection in computer users based on digital signal processing of noninvasive physiological variables. In: 2006 International Conference of the IEEE Engineering in Medicine and Biology Society. IEEE, pp 1355–1358
Healey JA, Picard RW (2005) Detecting stress during real-world driving tasks using physiological sensors. IEEE Trans Intell Transp Syst 6:156–166. https://doi.org/10.1109/TITS.2005.848368
Han HJ, Labbaf S, Borelli JL et al (2020) Objective stress monitoring based on wearable sensors in everyday settings. J Med Eng Technol 44:177–189. https://doi.org/10.1080/03091902.2020.1759707
Blanco-Velasco M, Weng B, Barner KE (2008) ECG signal denoising and baseline wander correction based on the empirical mode decomposition. Comput Biol Med 38:1–13. https://doi.org/10.1016/j.compbiomed.2007.06.003
Gupta P, Sharma KK, Joshi SD (2015) Baseline wander removal of electrocardiogram signals using multivariate empirical mode decomposition. Healthc Technol Lett 2:164–166. https://doi.org/10.1049/htl.2015.0029
Singhal A, Singh P, Fatimah B, Pachori RB (2020) An efficient removal of power-line interference and baseline wander from ECG signals by employing Fourier decomposition technique. Biomed Signal Process Control 57:101741. https://doi.org/10.1016/j.bspc.2019.101741
Siam AI, El-khobby HA, Abdelnaby MM et al (2019) A novel speech enhancement method using fourier series decomposition and spectral subtraction for robust speaker identification. Wireless Pers Commun 108:1055–1068. https://doi.org/10.1007/s11277-019-06453-4
Pedregosa F, Varoquaux G, Gramfort A et al (2011) Scikit-learn: machine learning in Python. J Mach Learn Res 12:2825–2830
Li L, Jamieson K, DeSalvo G et al (2017) Hyperband: a novel bandit-based approach to hyperparameter optimization. J Mach Learn Res 18:6765–6816
Goldberger AL, Amaral LAN, Glass L, et al (2000) PhysioBank, PhysioToolkit, and PhysioNet. Circulation 101 https://doi.org/10.1161/01.CIR.101.23.e215
Stress Recognition in Automobile Drivers v1.0.0. https://physionet.org/content/drivedb/1.0.0/. Accessed 12 Jul 2022
Altmann A, Toloşi L, Sander O, Lengauer T (2010) Permutation importance: a corrected feature importance measure. Bioinformatics 26:1340–1347. https://doi.org/10.1093/bioinformatics/btq134
Wang J-S, Lin C-W, Yang Y-TC (2013) A k-nearest-neighbor classifier with heart rate variability feature-based transformation algorithm for driving stress recognition. Neurocomputing 116:136–143. https://doi.org/10.1016/j.neucom.2011.10.047
Hwang B, You J, Vaessen T et al (2018) Deep ECGNet: an optimal deep learning framework for monitoring mental stress using ultra short-term ecg signals. Telemed e-Health 24:753–772. https://doi.org/10.1089/tmj.2017.0250
Lopez-Martinez D, El-Haouij N, Picard R (2019) Detection of real-world driving-induced affective state using physiological signals and multi-view multi-task machine learning. In: 2019 8th International Conference on Affective Computing and Intelligent Interaction Workshops and Demos (ACIIW). IEEE, pp 356–361
Wang K, Murphey YL, Zhou Y, et al (2019) Detection of driver stress in real-world driving environment using physiological signals. In: 2019 IEEE 17th International Conference on Industrial Informatics (INDIN). IEEE, pp 1807–1814
Funding
Open access funding provided by The Science, Technology & Innovation Funding Authority (STDF) in cooperation with The Egyptian Knowledge Bank (EKB).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare no competing interests.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Siam, A.I., Gamel, S.A. & Talaat, F.M. Automatic stress detection in car drivers based on non-invasive physiological signals using machine learning techniques. Neural Comput & Applic 35, 12891–12904 (2023). https://doi.org/10.1007/s00521-023-08428-w
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00521-023-08428-w