
Abstract
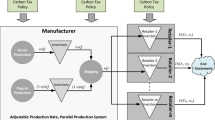
Today supply chains must internalize the impact of transport on the environment in their cost models. Therefore, managers must reduce green house gas emissions while striving to increase cost efficiency and satisfy demand. Our multi-echelon supply chain model minimizes pollution and cost while trying to achieve the best match between supply and demand over time. Three supply chain network configurations are investigated. Two of them are two-echelon: the first involves several suppliers and one warehouse, while the second involves one warehouse and several retail stores. The third network configuration is a three-echelon supply chain including multiple suppliers, one distribution center, and several retail stores. Using optimal control theory, we derive closed form solutions in such multi-echelon supply chain planning problems with consideration of pollution. This approach extends in a new direction the literature in operations and transport management by simultaneously addressing demand, supply as well as the greenhouse gas emissions that continuously vary in time and location. The proposed model provides a decision maker with the optimal choice of right deliveries, right times, while minimizing green house gas emissions. A numerical illustration presents some insights.



Similar content being viewed by others
Availability of Data and Material (Data Transparency)
Not applicable.
Code Availability (Software Application or Custom Code)
Not applicable.
References
Robbins, N., Tickell, S., & Irwin, W. (2020). Financing climate action with positive social impact: How banking can support a just transition in the UK. resreport, Grantham Research Institute (London School of Economics).
Economist, The. (2020). The great disrupter. The Economist, 436, 5–10.
EPA. (2020). Fast facts on transportation greenhouse gas emissions report\(\#\)epa-420-f-20-037. Office of Transportation and Air Quality. https://tinyurl.com/y453j3jj
European Environment Agency. (2019). Co2 emissions from cars: facts and figures. (Ref.: 20190313STO31218) https://tinyurl.com/y293ao8t
Büyükkaramikli, N. C., Gürler, Ü., & Alp, O. (2014). Coordinated logistics: joint replenishment with capacitated transportation for a supply chain. Production and Operations Management, 23(1), 110–126.
Gürbüz, M. Ç., Moinzadeh, K., & Zhou, Y.-P. (2007). Coordinated replenishment strategies in inventory/distribution systems. Management Science, 53(2), 293–307.
Tempelmeier, H., & Bantel, O. (2015). Integrated optimization of safety stock and transportation capacity. European Journal of Operational Research, 247(1), 101–112.
Jabali, O., Van Woensel, T., & De Kok, A. (2012). Analysis of travel times and CO2 emissions in time-dependent vehicle routing. Production and Operations Management, 21(6), 1060–1074.
Van Woensel, T., Creten, R., & Vandaele, N. (2001). Managing the environmental externalities of traffic logistics: The issue of emissions. Production and Operations Management, 10(2), 207–223.
Franceschetti, A., Honhon, D., Woensel, T. V., Bektaş, T., & Laporte, G. (2013). The time-dependent pollution-routing problem. Transportation Research Part B: Methodological, 56, 265–293.
Elhedhli, S., & Merrick, R. (2012). Green supply chain network design to reduce carbon emissions. Transportation Research Part D: Transport and Environment, 17(5), 370–379.
Ma, Q., Wang, W., Peng, Y., & Song, X. (2018). An optimization approach to the intermodal transportation network in fruit cold chain, considering cost, quality degradation and carbon dioxide footprint. Polish Maritime Research, 25(1), 61–69.
Zhang, D., Zhan, Q., Chen, Y., & Li, S. (2018). Joint optimization of logistics infrastructure investments and subsidies in a regional logistics network with CO2 emission reduction targets. Transportation Research Part D: Transport and Environment, 60, 174–190.
Xu, Z., Elomri, A., Pokharel, S., & Mutlu, F. (2019). The design of green supply chains under carbon policies: A literature review of quantitative models. Sustainability, 11(11), 3094.
Presman, E., & Sethi, S. P. (2006). Inventory models with continuous and Poisson demands and discounted and average costs. Production and Operations Management, 15(2), 279–293.
Levin, Y., McGill, J., & Nediak, M. (2010). Optimal dynamic pricing of perishable items by a monopolist facing strategic consumers. Production and Operations Management, 19(1), 40–60.
Ciancimino, A., Inzerillo, G., Lucidi, S., & Palagi, L. (1999). A mathematical programming approach for the solution of the railway yield management problem. Transportation Science, 33(2), 168–181.
Dai, J., Kleywegt, A. J., & Xiao, Y. (2018). Network revenue management with cancellations and no-shows. Production and Operations Management, 28(2), 292–318.
Kirshner, S. N., & Nediak, M. (2015). Scalable dynamic bid prices for network revenue management in continuous time. Production and Operations Management, 24(10), 1621–1635.
Li, Y., Jia, G., Cheng, Y., & Hu, Y. (2016). Additive manufacturing technology in spare parts supply chain: a comparative study. International Journal of Production Research, 55(5), 1498–1515.
Warburton, R. D., Disney, S. M., Towill, D. R., & Hodgson, J. P. (2004). Further insights into ‘the stability of supply chains.’ International Journal of Production Research, 42(3), 639–648.
Song, D.-P., & Earl, C. F. (2008). Optimal empty vehicle repositioning and fleet-sizing for two-depot service systems. European Journal of Operational Research, 185(2), 760–777.
Yang, J., Jaillet, P., & Mahmassani, H. S. (1999). On-line algorithms for truck fleet assignment and scheduling under real-time information. Transportation Research Record, 1667(1), 107–113.
Ivanov, D., Sethi, S., Dolgui, A., & Sokolov, B. (2018). A survey on control theory applications to operational systems, supply chain management, and industry 4.0. Annual Reviews in Control, 46, 134–147.
Dolgui, A., Ivanov, D., Sethi, S. P., & Sokolov, B. (2018). Scheduling in production, supply chain and industry 4.0 systems by optimal control: fundamentals, state-of-the-art and applications. International Journal of Production Research, 57(2), 411–432.
Zayas-Cabán, G., Lodree, E. J., & Kaufman, D. L. (2020). Optimal control of parallel queues for managing volunteer convergence. Production and Operations Management.
Anderson, E. G., Jr., Morrice, D. J., & Lundeen, G. (2006). Stochastic optimal control for staffing and backlog policies in a two-stage customized service supply chain. Production and Operations Management, 15(2), 262–278.
Ivanov, D., Sokolov, B., Chen, W., Dolgui, A., Werner, F., & Potryasaev, S. (2020). A control approach to scheduling flexibly configurable jobs with dynamic structural-logical constraints. IISE Transactions, 1–18.
Li, Q., Guo, P., Li, C.-L., & Song, J.-S. (2016). Equilibrium joining strategies and optimal control of a make-to-stock queue. Production and Operations Management, 25(9), 1513–1527.
Papier, F. (2016). Managing electricity peak loads in make-to-stock manufacturing lines. Production and Operations Management, 25(10), 1709–1726.
Xu, H., Yao, D. D., & Zheng, S. (2011). Optimal control of replenishment and substitution in an inventory system with nonstationary batch demand. Production and Operations Management, 20(5), 727–736.
Yuan, Q., Chen, Y., Yang, J., & Zhou, Y. (2018). Joint control of emissions permit trading and production involving fixed and variable transaction costs. Production and Operations Management, 27(8), 1420–1454.
Tapiero, C. (1972). Transportation over time: A systems theory approach. In Proceedings, TIMS INTL, Israel, 1972.
Tapiero, C., & Soliman, M. (1972). Multi-commodities transportation schedules over time. Networks, 2(4), 311–327.
Tapiero, C. S. (1971). Transportation-location-allocation problems over time. Journal of Regional Science, 11(8), 377–384.
Adida, E., & Perakis, G. (2010). Dynamic pricing and inventory control: robust vs. stochastic uncertainty models–a computational study. Annals of Operations Research, 181(1), 125–157.
Colapinto, C., Jayaraman, R., Ben Abdelaziz, F., & La Torre, D. (2020). Environmental sustainability and multifaceted development: multi-criteria decision models with applications. Annals of Operations Research, 293, 405–432.
La Torre, D., Liuzzi, D., & Marsiglio, S. (2018). Population and geography do matter for sustainable development. Environment and Development Economics, 24(2), 201–223.
La Torre, D., Liuzzi, D., & Marsiglio, S. (2021). Transboundary pollution externalities: Think globally, act locally? Journal of Mathematical Economics, 96, 102511.
La Torre, D., Liuzzi, D., & Marsiglio, S. (2015). Pollution diffusion and abatement activities across space and over time. Mathematical Social Sciences, 78, 48–63.
La Torre, D., Liuzzi, D., & Marsiglio, S. (2019). The optimal population size under pollution and migration externalities: a spatial control approach. Mathematical Modelling of Natural Phenomena, 14, 104.
La Torre, D., Liuzzi, D., & Marsiglio, S. (2017). Pollution control under uncertainty and sustainability concern. Environmental and Resource Economics, 67(1), 885–903.
La Torre, D., Marsiglio, S., & Privileggi, F. (2018). Fractal attractors in economic growth models with random pollution externalities. Chaos: An Interdisciplinary Journal of Nonlinear Science, 28(5), 055916.
McKinnon, A., & Piecyk, M. (2011) Measuring and managing CO2 emission of European chemical transport. techreport, CEFIC European Chemical Industry Council.
Choi, T.-M., Guo, S., Liu, N., & Shi, X. (2020). Optimal pricing in on-demand-service-platform-operations with hired agents and risk-sensitive customers in the blockchain era. European Journal of Operational Research.
van Aken, J. E. (2005). Management research as a design science: Articulating the research products of mode 2 knowledge production in management. British Journal of Management, 16(1), 19–36.
Oliva, R. (2019). Intervention as a research strategy. Journal of Operations Management, 65(7), 710–724.
Reich, J., Kinra, A., Kotzab, H., & Brusset, X. (2020). Strategic global supply chain network design–how decision analysis combining MILP and AHP on a Pareto front can improve decision-making. International Journal of Production Research, 0(0), 1–16.
van Aken, J. E. (2007). Design science and organization development interventions: Aligning business and humanistic values. The Journal of Applied Behavioral Science, 43(1), 67–88.
Funding
Not applicable.
Author information
Authors and Affiliations
Contributions
All authors read and approved the final manuscript. All authors have equally contributed to the paper.
Corresponding author
Ethics declarations
Conflicts of Interest
The authors have no conflicts of interest/competing interests to declare.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix
Appendix
1.1 Proof of Theorem 1
Proof
This is the proof of Theorem 1. The Hamiltonian associated with the problem is:
The optimality conditions read as:
The differential equation for \(\lambda\) with terminal condition \(\lambda (T)=\theta\), namely
is linear and can be easily solved, leading to \(\lambda (t) = \theta e^{\delta _P (t-T)}\). If we plug the expression of \(\lambda\) into the maximum principle, we get:
If we define the matrix
and the vectors
This equation can be written in vectorial form as:
and, using the fact that the matrix \(\mathbf{\Omega (t)}\) is invertible, we get
The equation of P boils down to:
and this differential equation has a closed form given by:
\(\blacksquare\)
1.2 Proof of Theorem 2
The proof of this theorem is very similar to the one of Theorem 1 and is therefore omitted.
1.3 Proof of Theorem 3
The Hamiltonian associated with the problem is:
The optimality conditions read as:
The differential equation for \(\lambda\) with terminal condition \(\lambda (T)=\theta\), namely
is linear and can be easily solved, leading to \(\lambda (t) = \theta e^{\delta _P (t-T)}\). If we plug the expression of \(\lambda\) into the maximum principle, we get:
If we define the matrix
with
and the vectors
This equation can be written in vectorial form as:
and, using the fact that the matrix \(\mathbf{\Omega 1(t)}\) is invertible, we get
The equation of P boils down to:
and this differential equation has a closed form given by:
1.4 Proof of Theorem 4
The proof of this theorem is very similar to the one of Theorem 1, and it can be obtained from it by introducing a time shift of L units.
1.5 Proof of Theorem 5
The proof of this theorem is very similar to the one of Theorem 3, and it can be obtained from this one by adding an exogenous inventory variable.
Rights and permissions
About this article

Cite this article
Brusset, X., Jebali, A., La Torre, D. et al. Optimal Pollution Control in a Dynamic Multi-echelon Supply Chain. Environ Model Assess 27, 585–598 (2022). https://doi.org/10.1007/s10666-022-09824-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10666-022-09824-7