
Abstract
Small populations of plant species can be susceptible to demographic Allee effects mainly due to pollen limitation. Although sympatry with a common, co-flowering species may somewhat alleviate the problem of pollinator visitation (pollination quantity), the interspecific pollen transfer, IPT, (pollination quality) may remain a barrier to reproduction in small populations such as new introductions. However, if the two species are crosscompatible, our hypothesis is that neutral hybridization can help the small founding population overcome the Allee effect by improving the quality of pollination. We tested this hypothesis by using a novel modelling approach based on the theory of kinetic reactions wherein pollinators act as enzymes to catalyse the reaction between the two substrates: pollen and unselfed ovule. Using a single locus, two-allele genetic model, we developed a generic model that allows for hybridization between the invading and the native genotypes. Analysing the stability properties of the trivial equilibria in hybridization model as compared with the single genotype invasion model, we found that hybridization can either remove or reduce the Allee effect by making an otherwise stable trivial equilibrium unstable. Our study suggests that hybridization can be neutral but still be the key driver of a successful invasion by mediating pollen limitation. Conservation programmes should therefore account for this cryptic role that hybridization could play in plant invasions.






Similar content being viewed by others

References
Aldridge G, Campbell D (2006) Asymmetrical pollen success in Ipomopsis (polemoniaceae) contact sites. Am J Bot 93(6):903–909. http://www.amjbot.org/content/93/6/903.short
Blackburn TM, Lockwood JL, Cassey P (2015) The influence of numbers on invasion success. Mol Ecol 24:1942–1953. doi:10.1111/mec.13075
Boukal DS, Berec L (2002) Single-species models of the Allee effect: extinction boundaries, sex ratios and mate encounters. J Theor Biol 218:375–394. doi:10.1006/yjtbi.3084
Buckingham E (1914) On physically similar systems, illustrations of the use of dimensional equations. Phys Rev 4(4):345–376. doi:10.1103/PhysRev.4.345
Busch JW (2005) The evolution of self-compatibility in geographically peripheral populations of Leavenworthia alabamica (brassicaceae). Am J Bot 92(9):1503–1512. doi:10.3732/ajb.92.9.1503
Campbell DR, Aldridge G (2006) Floral biology of hybrid zones. In: Harder LD, Barrett SCH (eds) Ecology and evolution of flowers. chap 18. Oxford University Press, Oxford, pp 326–345
Carney SE, Hodges SA, Arnold ML (1996) Effects of differential pollen-tube growth on hybridization in the Louisiana Irises. Evolution 50(5):1871–1878. doi:10.2307/2410745
Caruso CM, Alfaro M (2000) Interspecific pollen transfer as a mechanism of competition: effect of Castilleja linariaefolia pollen on seed set of Ipomopsis aggregata. Can J Bot 78(5):600–606. doi:10.1139/cjb-78-5-600
Chapuisa JL, Frenotb Y, Lebouvierb M (2004) Recovery of native plant communities after eradication of rabbits from the subantarctic Kerguelen Islands, and influence of climate change. Biol Conserv 117(2):167–179
Copson G, Whinam J (1998) Response of vegetation on subantarctic Macquarie Island to reduced rabbit grazing. Aust J Bot 46 :15–24
Duffy KJ, Stout JC (2011) Effects of conspecific and heterospecific floral density on the pollination of two related rewarding orchids. Plant Ecol 212(8):1397–1406. doi:10.1007/s11258-011-9915-1
Durrett R, Buttel L, Harrison R (2000) Spatial models for hybrid zones. Heredity 84:9–19
Edelstein-Keshet L (1988) Mathematical models in biology. Random House Inc., New York
Elam DR, Ridley CE, Goodell K, Ellstrand NC (2007) Population size and relatedness affect fitness of a self-incompatible invasive plant. Proc Natl Acad Sci 104(2):549–552. doi:10.1073/pnas.0607306104
Ellstrand NC, Elam DR (1993) Population genetic consequences of small population size: implications for plant conservation. Annu Rev Ecol Evol Syst 24:217–242. doi:10.1146/annurev.es.24.110193.001245 10.1146/annurev.es.24.110193.001245
Ellstrand NC, Ka S (2000) Hybridization as a stimulus for the evolution of invasiveness in plants? Proc Natl Acad Sci 97(13):7043–7050. http://www.pubmedcentral.nih.gov/articlerender.fcgi?artid=34382&tool=pmcentrez&rendertype=abstract
Epifanio J, Philipp D (2000) Simulating the extinction of parental lineages from introgressive hybridization: the effects of fitness, initial proportions of parental taxa, and mate choice. Rev Fish Biol Fish 10:339–354. doi:10.1023/A:1016673331459
Esfeld K, Ma K, van der Niet T, Seifan M, Thiv M (2009) Little interspecific pollen transfer despite overlap in pollinators between sympatric Aeonium (crassulaceae) species pairs. Flora 204(10):709–717. doi:10.1016/j.flora.2008.10.002
Feldman TS, Morris WF, Wilson WG (2004) When can two plant species facilitate each other’s pollination? Oikos 105:197–207
Ghazoul J (2005) Pollen and seed dispersal among dispersed plants. Biol Rev 80(03):413–443. doi:10.1017/S1464793105006731
Ghazoul J (2006) Floral diversity and the facilitation of pollination. J Ecol 94(2):295–304. doi:10.1111/j.1365-2745.2006.01098.x
Ghazoul J, Shaanker RU (2004) Sex in space: pollination among spatially isolated plants. BIOTROPICA 36(2):128–130. doi:10.1111/j.1744-7429.2004.tb00304.x
Grixti J, Packer L (2006) Changes in the bee fauna (hymenoptera: Apoidea) of an old field site in southern ontario, revisited after 34 years. Can Entomol 138(2):147–164
Hall RJ, Ayres DR (2008) What can mathematical modeling tell us about hybrid invasions? Biol Invasions 11(5):1217–1224. doi:10.1007/s10530-008-9387-y
Hall RJ, Hastings A, Ayres DR (2006) Explaining the explosion: modelling hybrid invasions. Proc R Soc Lond B Biol Sci 273(1592):1385–1389. doi:10.1098/rspb.2006.3473
Hanoteaux S, Tielbörger K, Seifan M (2013) Effects of spatial patterns on the pollination success of a less attractive species. Oikos 122(6):867–880. doi:10.1111/j.1600-0706.2012.20801.x
Harper JH, McNaughton JL (1962) The comparative biology of closely related species living in the same area. VII. Interference between individuals in pure and mixed populations of papaver species. New Phytol 61(2):175–188. doi:10.1111/j.1469-8137.1962.tb06286.x
Harper JL (1977) Population biology of plants. Academic, London
Hovick SM, Whitney KD (2014) Hybridisation is associated with increased fecundity and size in invasive taxa: meta-analytic support for the hybridisation-invasion hypothesis. Ecol Lett 17:1464–1477. doi:10.1111/ele.12355
Hu XS (2005) Tension versus ecological zones in a two-locus system. Theor Popul Biol 68(2):119–131. doi:10.1016/j.tpb.2005.02.003
Huxel G (1999) Rapid displacement of native species by invasive species: effects of hybridization. Biol Conserv 89:143–152. http://www.sciencedirect.com/science/article/pii/S0006320798001530
Janovsky Z, Mikat M, Hadrava J, Horcickova E, Kmecova K, Pozarova D, Smycka J, Herben T (2013) Conspecific and heterospecific plant densities at small-scale can drive plant-pollinator interactions. PLOS ONE 8
Johnson SD, Peter CI, Nilsson LA, Ågren J (2003) Pollination success in a deceptive orchid is enhanced by co-occurring rewarding magnet plants. Ecol 84(11):2919–2927. doi:10.1890/02-0471
Kanarek AR, Webb CT, Barfield M, Holt RD (2012) Allee effects, aggregation, and invasion success. Theoretical Ecology 6(2):153–164. doi:10.1007/s12080-012-0167-z
Keddy PA (1981) Experimental demography of the sand-dune annual, cakile edentula, growing along an environmental gradient in nova-scotia. J Ecol 69(2):615–630. doi:10.2307/2259688
Keener J, Sneyd J (2009) Mathematical physiology. Vol. I: Cellular physiology, interdisciplinary applied mathematics, vol 8, 2nd edn. Springer, New York
Keitt TH, Lewis MA, Holt RD (2001) Allee effects, invasion pinning, and species’ borders. Am Nat 157 (2):203–216
Kot M, Lewis M, Driessche PVD (1996) Dispersal data and the spread of invading organisms. Ecol 77 (7):2027–2042. http://www.esajournals.org/doi/abs/10.2307/2265698
Kunin W (1993) Sex and the single mustard: population density and pollinator behavior effects on seed-set. Ecol 74(7):2145–2160. http://www.jstor.org/stable/1940859
Kunin WE (1997) Population size and density effects in pollination: pollinator foraging and plant reproductive success in experimental arrays of brassica kaber. J Ecol 85(2):225–234. doi:10.2307/2960653
Lambers JHR, Clark JS, Beckage B (2002) Density-dependent mortality and the latitudinal gradient in species diversity. Nature 417:732–735. doi:10.1038/nature00809
Laverty TM (1992) Plant interactions for pollinator visits: a test of the magnet species effect. Oecologia 89 (4):502–508
Lee CB, Page LE, McClure Ba, Holtsford TP (2008) Post-pollination hybridization barriers in nicotiana section alatae. Sex Plant Reprod 21:183–195. doi:10.1007/s00497-008-0077-9
Levin DA, Kelley CD, Sarkar S (2009) Enhancement of Allee effects in plants due to self-incompatibility alleles. J Ecol 97(3):518–527. doi:10.1111/j.1365-2745.2009.01499.x
Lewis M, Kareiva P (1993) Allee dynamics and the spread of invading organisms. Theor Popul Biol 43:141–158. http://www.sciencedirect.com/science/article/pii/S0040580983710075
Liebhold A, Bascompte J (2003) The Allee effect, stochastic dynamics and the eradication of alien species. Ecol Lett 6(2):133–140. doi:10.1046/j.1461-0248.2003.00405.x
Mesgaran MB, Lewis MA, Ades PK, Donohue K, Ohadi S, Li C, Cousens RD (2016) Hybridization can facilitate species invasions, even without enhancing local adaptation. Proc Natl Acad Sci, in press
Morales CL, Traveset A (2008) Interspecific pollen transfer: Magnitude, prevalence and consequences for plant fitness. Crit Rev Plant Sci 27(4):221–238. doi:10.1080/07352680802205631
Moreira EF, Boscolo D, Viana BF (2015) Spatial heterogeneity regulates plant-pollinator networks across multiple landscape scales. PLOS ONE 10(4). doi:10.1371/journal.pone.0123628
Murray J D (2002) Mathematical biology. i, interdisciplinary applied mathematics, vol 17, 3rd edn. Springer, New York. An introduction
Pearson CE (ed) (1990) Handbook of applied mathematics, 2nd. Van Nostrand Reinhold Co, New York. selected results and methods
Pickup M, Young AG (2008) Population size, self-incompatibility and genetic rescue in diploid and tetraploid races of rutidosis leptorrhynchoides (asteraceae). Heredity 100(3):268–274. doi:10.1038/sj.hdy.6801070
Randall J, Hilu K (1990) Interference through improper pollen transfer in mixed stands of impatiens capensis and i. pallida (balsaminaceae). Am J Bot 69(6):1022–1031
Rathcke B (1983) Competition and facilitation among plants for pollination. In: Real LA (ed) Pollination biology. doi:10.1016/B978-0-12-583980-8.50019-3. Academic, Orlando, pp 305–329
Rhymer JM, Simberloff D (1996) Extinction by hybridization and introgression. Annu Rev Ecol Syst 27 (1):83–109. doi:10.1146/annurev.ecolsys.27.1.83
Rieseberg LH (1997) Hybrid origins of plant species. Annu Rev Ecol Syst 28:359–389. doi:10.1146/annurev.ecolsys.28.1.359
Robson DB (2013) An assessment of the potential for pollination facilitation of a rare plant by common plants: Symphyotrichum sericeum (asteraceae) as a case study. Botany 42(January):34–42. doi:10.1139/cjb-2012-0133
Schemske DW, Bradshaw HD (1999) Pollinator preference and the evolution of floral traits in monkeyflowers (mimulus). Proc Natl Acad Sci 96(21):11,910–11,915. doi:10.1073/pnas.96.21.11910
Seeley TD, Camzine S, Sneyd J (1991) Collective decision-making in honey bees: how colonies choose among nectar sources. Behaviour Ecology Sociobiology 28:277–290
Segel LA (1972) Simplification and scaling. SIAM Rev 14(4):547–571. doi:10.1137/1014099
Seifan M, Hoch Em, Hanoteaux S (2014) The outcome of shared pollination services is affected by the density and spatial pattern of an attractive neighbour. J Ecol 102:953–962. doi:10.1111/1365-2745.12256
Sieber Y, Holderegger Rolf R, Waser NM, Thomas VFD, Braun S, Erhardt A, Reyer HU, Wirth LR (2011) Do alpine plants facilitate each other’s pollination? Experiments at a small spatial scale. Acta Oecol 37 (4):369–374. doi:10.1016/j.actao.2011.04.005
Simberloff D (2009) The role of propagule pressure in biological invasions. Ann Rev Ecol Evol Syst 40 (1):81–102. doi:10.1146/annurev.ecolsys.110308.120304
Taylor CM, Hastings A (2005) Allee effects in biological invasions. Ecol Lett 8 (8):895–908. doi:10.1111/j.1461-0248.2005.00787.x
Thomson JD (1978) Effects of stand composition on insect visitation in two-species mixtures of hieracium. Am Midl Nat 100(2):431–440
Tobin PC, Berec L, Liebhold AM (2011) Exploiting Allee effects for managing biological invasions. Ecol Lett 14 (6):615–24. doi:10.1111/j.1461-0248.2011.01614.x. http://www.ncbi.nlm.nih.gov/pubmed/21418493
Waser NM (1978) Interspecific pollen transfer and competition between co-occurring plant species. Oecologia 36(2):223–236
Watkinson AR, Harper JL (1978) Demography of a sand dune annual - vulpia-fasciculata. 1. Natural regulation of populations. J Ecol 66(1):15–33. doi:10.2307/2259178
Watkinson AR, Lonsdale WM, Andrew MH (1989) Modeling the population-dynamics of an annual plant sorghum intrans in the wet-dry tropics. J Ecol 77(1):162–181. doi:10.2307/2260923
Westphal C, Bommarco R, Carre G, Lamborn E, Morison N, Petanidou T, Potts SG, Roberts SPM, Szentgyoergyi H, Tscheulin T, Vaissiere BE, Woyciechowski M, Biesmeijer JC, Kunin WE, Settele J, Steffan-Dewenter I (2008) Measuring bee diversity in different european habitats and biogeographical regions. Ecol Monogr 78(4):653–671. doi:10.1890/07-1292.1
Willi Y, Van Buskirk J, Fischer M (2005) A threefold genetic Allee effect: population size affects cross-compatibility, inbreeding depression and drift load in the self-incompatible ranunculus reptans. Genetics 169(4):2255–2265. doi:10.1534/genetics.104.034553
Wolf DE, Takebayashi N, Rieseberg LH (2001) Predicting the risk of extinction through hybridization. Conserv Biol 15(4):1039–1053. doi:10.1046/j.1523-1739.2001.0150041039.x
Young AG, Pickup M (2010) Low s-allele numbers limit mate availability, reduce seed set and skew fitness in small populations of a self-incompatible plant. J Appl Ecol 47(3):541–548. doi:10.1111/j.1365-2664.2010.01798.x
Young AG, Broadhurst LM, Thrall PH (2012) Non-additive effects of pollen limitation and self-incompatibility reduce plant reproductive success and population viability. Ann Bot 109(3):643–653. doi:10.1093/aob/mcr290. http://www.pubmedcentral.nih.gov/articlerender.fcgi?artid=3278296&tool=pmcentrez&rendertype=abstract
Acknowledgments
We gratefully acknowledge funding for this project from Australian Research Council Discovery Grant DP140100608 to RDC and MAL. JB was funded by a PIMS Postdoctoral Fellowship and the University of Alberta. MAL gratefully acknowledges additional funding from the Natural Sciences Research Council of Canada and the Canada Research Chairs programme. We thank colleagues in the Lewis Lab for helpful feedback and suggestions on the research.
Author information
Authors and Affiliations
Corresponding author
Appendices
Appendix A: Derivation of the models
In this section, we use a quasi-steady state approximation followed by rescaling of the dependent and independent variables to obtain a dimensionless ordinary differential equation that describes the rate of change in seed number as a function of pollen and ovule density; the dynamics are defined by Eqs. 1, 2 and 3.
A.1 Kinetic reaction theory and quasi-steady-state approximation
The time-evolution of N can be obtained through a quasi-steady-state approximation as described in Keener and Sneyd (2009) and Murray (2002). Let s 1=[S 1], s 2=[S 2], e=[E], c 1=[C 1], c 2=[C 2], n=[N] be the abundance of pollen, ovules, pollinator without pollen, pollinators with pollen, pollinator with pollen on ovules and seeds, respectively. We derive, from the kinetic reaction (1), (2) and (3), the following system of ODEs:
Note that
-
n will be known once c 2 and s 2 are known and it does not affect the dynamics of the other variables in the system so the equation can be removed from the system,
-
\(\displaystyle {\frac {de}{dt}+\frac {dc_{1}}{dt}+\frac {dc_{2}}{dt}=0}\) thus e + c 1 + c 2 = e(0) + c 1(0) + c 2(0) = e 0 and e can be deduced from c 1 and c 2, so we can remove e from the system by replacing it with e 0−c 1−c 2. Rewriting the equations for s 1, s 2, c 1 and c 2, we obtain the following new system
$$\left\{\begin{array}{llll} \frac{ds_{1}}{dt}=-k_{1}s_{1}e_{0}+k_{1}s_{1}c_{1}+k_{1}s_{1}c_{2},\\ \frac{ds_{2}}{dt}=-k_{0}s_{2}-k_{3}c_{1}s_{2}+(1-\nu)k_{4}c_{2},\\ \frac{dc_{1}}{dt}\,=\,k_{1}s_{1}e_{0}-k_{1}s_{1}c_{1}-k_{1}s_{1}c_{2}-k_{2}c_{1}-k_{3}c_{1}s_{2}+k_{4}c_{2},\\ \frac{dc_{2}}{dt}=k_{3}s_{2}c_{1}-k_{4}c_{2}. \end{array}\right. $$(17)
The quasi-steady state approximation assumes that the rate of formation and breakdown of complexes are essentially equal at all times, that is d c 1/d t=0 and d c 2/d t=0. This approximation can be derived through non-dimensionalization of the system, choosing for example the following dimensionless variables:
where e 0 and s 0 are the initial number of enzyme (pollinator) and substrate (pollen and ovule), respectively.
Now, writing the equations based on the scaled variables, one gets:
with \(\epsilon =\frac {e_{0}}{s_{0}}\).
Notice that in our framework 𝜖<<1 as that there is much more pollen and ovule (substrate) than pollinator (enzyme) in the beginning.
Thus, letting 𝜖→0 while considering the last two equations in Eq. 18, we have
which after solving for v 1 and v 2, we obtain the following:
Scaling back to the initial variables c 1 and c 2, Eqs. 19 can be written
Note that these two equations could have been obtained directly by setting d c 1/d t=0 and d c 2/d t=0. Using the last equation in (16):
and after some substitutions and simplifications, we obtain the following ODE that describes the dynamics of seed production n as related to the density of pollen, s 1, and ovules, s 2:
where
We also obtained equations for the temporal dynamics of s 1 and s 2 but our focus here is on the role of the ovules and pollen on the production of seeds and not the dynamics of these reactants per se.
The above Eq. 21 models the birth rate of seeds only: to account for death of individuals, we incorporated a density-dependent mortality component as follows:
with d 1 and d 2 being the density-independent and the density-dependent death rates, respectively (Harper and McNaughton 1962).
This last Eq. 22 describes the rate of change in n, the density of seeds, as a function of n itself but also that of the pollen and ovule densities. The first term in the right hand side of the Eq. 22 represents reproduction through self-fertilization, whereas the second term indicates seed production via outcrossing. The last term on the right-hand side of Eq. 22 accounts for death that can happen at any stage of the plant’s life cycle over the whole growing season. Note that Eq. 22 models changes in plant density over time as a single stage, so that from a mathematical perspective, n can be envisioned both as a seed in the seedbank or as a mature plant above the ground. That is, the rate of change in n is simply the result of the difference between birth and death rates. This simplification is reasonable as our model is based on the life cycle of an annual plant with no persistent seedbank and thus with no overlap between generations. We can therefore further simplify the model by assuming that the other two dynamic variables, i.e. s 1 and s 2 in Eq. 22, are proportional to n (this results in the final model (4) as will be discussed later).
A.2 Non-dimensionalization
To reduce the number of free parameters in the system, we scaled the variables and reduced the model to a dimensionless problem (Buckingham 1914; Segel 1972) by strategically choosing
where \(c_{s}^{1,2}\) are positive constants that will be determined later. Equation 22, after substituting the scaled variables, becomes the following:
For simplicity, we drop the ∗, but hereafter the variable n, s 1, s 2 and t refer to the non-dimensionalized version of the same variables. We obtain the non-dimensional version of Eq. 22:
where
and
The ratio d 2/d 1 represents the relative contributions of density- and non-density-related factors to mortality, which are not easy to separate and can vary depending on the habitat type and species (Harper 1977). In disturbance-prone habitats such as coastal systems, for example, mortality is mainly due to erosion and is less affected by the density of plants (e.g. Keddy 1981). However, in tropical habitats and forests, where competition could become intensive, density can be a driving force of mortality (e.g. Lambers et al. 2002). Here, we assumed that mortality is mainly caused by density-independent regulators (as in Watkinson and Harper1978; Keddy1981; Watkinson et al. 1989), though the opposed scenario can also be used without the loss of the generality of results. In the annual species Vulpia fasciculata plant, for example, mortality due to density-independent factors ranged from 7 to 40 % in the study of Watkinson and Harper (1978). Similarly, fire, as a density-independent factor, killed ∼40 % of flowering Sorghum intrans plants (Watkinson et al. 1989).
If we assume 30 % of plants die due to factors unrelated to the density while competition, i.e. density-dependent processes between plants, accounts for 9 % death over the growing season of 100 days, we will obtain a \(d_{2}/{d_{1}^{2}} = 100\) day per unit density. We also assume that pollen deposition and the breakdown of the complex C 2 happen at the same rate, so that k 3 = k 4. This gives k 3/k 4=1 per unit density. The selection of these values is somewhat arbitrary and for mathematical convenience, e.g. parameter A, which is dimensionless, is now reduced to A = k 0×100 day where 100 is the length of growing season assumed for an annual plant: a longer or shorter growing period will not qualitatively affect the results. Parameter A now represents the selfing rate (k 0) over the season. Nevertheless, the above mortality values are still realistic and fall within the range of reported values. Using the above argument, one also obtains that \(B=\nu \cdot k_{4} \cdot e_{0}\cdot 100 \: \mathrm { day} \cdot \mathrm {m}^{2}.\) The parameter e 0 represents the density of pollinators at the time of the introduction and was assumed to be 1 m−2, which lies within the range of pollinator abundance in several surveys (e.g. Grixti and Packer 2006; Janovsky et al. 2013; Moreira et al. 2015; Westphal et al. 2008). The density of pollinators, e 0, can change (positively) with the plant density (Kunin 1993), but as we are mainly interested in the potential effect of hybridization on the quality of pollination, we assumed that this parameter is constant and independent of plant density. Now, the dimensionless parameter B becomes B = ν⋅k 4⋅100 day,which represents the fertile outcrossing rate as function of cross pollination rate, k 4, and fertilization success rate, ν, in a growing season.
Equation 24 is thus a dimensionless equation that describes the rate of change in n as a function of A and B, representing the selfing and outcrossing rates over the season, respectively. This equation was then used to derive two different models: a model with a single invading species and the other with two hybridizing species.
Equation 22 and its dimensionless version Eq. 24 describe the multiple temporal processes within the life cycle of a plant simultaneously as a single phenomenon where n can be any expression of a plant’s developmental stages from seed to seedling to mature plant. We assume that, on average, the ovule density and pollen load density are proportional to the plant density, which, in turn, is proportional to the matured seed density. We choose the constants of proportionality to be the undetermined constants from the non-dimensionlization, \({c_{s}^{1}}\) and \({c_{s}^{2}}\), so that \(s_{1}={c_{s}^{1}} n\) and \(s_{2}={c_{s}^{2}} n\).
Appendix B: Model of two non-hybridizing genotypes: competition model
B.1 The model
In this section, we expand our single species model (4) to a system of two competing genotypes (species), namely the native (resident) genotype, denoted by N, and a new incoming (invading) genotype, denoted by I. The two genotypes interact with each other through density-dependent regulation, e.g. death rate is a function of the total population size N + I, but they do not intercross, i.e no hybridization occurs between them. The two genotypes are assumed to vary in their selfing, parameter A, and outcrossing, parameter B, rates. Extending the Eq. 4 to include two genotypes results in the system of two ODEs:
where n I and n N denote the densities of invading and native genotypes, respectively. From Eq. 27, it can be seen that the existence of another genotype will always reduce the growth of either genotype. Now, suppose that the native genotype is at equilibrium (i.e. \(n_{N}\equiv \bar {n}_{N}\)) at the time the propagules of the new genotype arrive at the location. As the density of the native is kept constant, the dynamics of invading can be studied through the following:
As we assumed that the native genotype always remains at equilibrium and that it cannot interbreed with the invading genotype, the differential model of the invader in the presence of a resident species is similar to that of the single invading genotype, with the only exception being density-dependent mortality formulation.
B.2 Analysis of the model
Similar to the single species dynamics (Appendix C), bifurcation analysis of the above model gave rise to four outcomes, contingent on the value of A I with respect to the bifurcation point \((1+\bar {n}_{N})\) and the value of B I with respect to 1 (Fig. 7). When \(A_{I}>(1+\bar {n}_{N}),\) population grows either with a weak Allee effect (if B I >1) or with no Allee effect (if B I <1). In the case of \(A_{I} <(1+\bar {n}_{N}),\) the invading population will have no growth and go extinct (if B I is small) or experience strong Allee effects (if B I becomes large).

Bifurcation diagram (27) depicting four dynamic outcomes for the invading genotype as related to parameters A (representing selfing rate) and B (representing outcrossing rate). See the “B.2 Analysis of the model” section for more details
Appendix C: Analysis of the dynamics of invasion in the single species model
C.1 Single species model
In this section, we derive the analysis performed on the function F of Eq. 4, in order to characterize its shape and the type of growth for n.
When A > 1, using Descartes’ rule of sign (Appendix C.2 or in Pearson (1990), chapter 1), one can conclude that there exists a unique positive root n ∗ for F. Given that when n > 0 is small, F(n)>0 whereas \(F(n)\to -\infty \) as \(n\to +\infty \) we obtain
We can conclude that for A>1, the growth function F is always positive and there exists a stable equilibrium n ∗>0. Moreover, the per capita growth rate
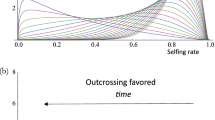
is maximal at 0 if and only if B≤1. The model will thus give rise to a weak Allee effect if and only if B>1 (Fig. 1).
When A=1, the model reduces to
which is positive for some values of n>0 if and only if B>1. In this case, there exists \(n^{*}_{B}>0\) such that
Lastly, if we assume that A<1, the use of Descartes’ rule of sign affirms the growth function is always negative if B≤2−A. To investigate the model behaviour for situations where the population may grow, i.e. B>2−A, we use Cardan’s method (Appendix C.3; also see Pearson (1990), chapter 1). We found that the function F can either be bistable or negative depending on the sign of the so-called discriminant Δ (see Appendix C.3). Accordingly, when Δ<0, there exists two positive roots \(0<n^{*}_{1}<n^{*}_{2}\) such that
and
Whereas 0 and \(n^{*}_{2}\) equilibria are stable, the \(n^{*}_{1}\) equilibrium is unstable. The function F is thus bistable when Δ<0 and there is a strong Allee effect. When Δ≥0, F(n)≤0 for all n≥0 and the only non-negative stable equilibrium is 0, implying that there is no growth.
C.2 Descartes’ rule of sign
Descartes’ rule of sign is used to obtain an upper bound on the number of positive roots of a polynomial (Pearson 1990, chapter 1). That is, if the polynomial is ordered by descending variable exponent, then the number of sign changes between consecutive non-zero coefficients is greater or equal to the number of positive roots of the polynomials. Moreover, if the number of positive roots is not equal to the number of sign changes of non-zero consecutive coefficient, then it is smaller than it by an even number. Let Z denotes the number of sign changes of consecutive non-zero coefficients and P the number of positive roots, then
This means for example that if Z is odd then there is at least one positive root and if Z=1, then we know that there is exactly one positive root.
This rule can be extended to negative roots also by considering −x in the polynomial instead of x and again using the above rule.
In our framework we write F as follows:
As the denominator in (30) is positive when x is non-negative, using Descartes’ rule of signs for the third order polynomial in the numerator, we found that if A>1 then there is always only one sign change between the coefficients and thus there is exactly one positive root x ∗ > 0.
C.3 Cardan’s method
A brief description of Cardan’s method can be found in Pearson (1990), chapter 1. Here, we provide more details on the method. We are interested in solving the general cubic equation, using Cardan’s method
We first reduce this equation in a degenerate cubic equation of the form
This can be done by the following substitution:
Then Eq. 31 becomes
with p=(3b−a 2)/3 and q=(2a 2−9a b+27c)/27.
-
If p = q=0, then the only solution is t=0, which is equivalent to x=−a/3,
-
If q ≠ 0 and p=0, then \(t=\{\sqrt [3]{-q}, \sqrt [3]{-q}(-\frac {1}{2}-\sqrt {3}\frac {i}{2}),\sqrt [3]{-q}(-\frac {1}{2}+\sqrt {3}\frac {i}{2})\}\), and x = t−a/3,
-
If p ≠ 0 and q=0, then \(t=\{0, -\sqrt {-p}, \sqrt {-p}\}\) and x = t−a/3,
-
If p ≠ 0 and q ≠ 0, then we introduce u and v such that t = u−v. Given that
$$ (u-v)^{3}+3uv(u-v)-(u^{3}-v^{3})=0 $$(34)we obtain p=3u v and q=−(u 3−v 3). Note that u ≠ 0 and v ≠ 0. This implies that \(v=\frac {p}{3u}\) and
$$u^{3}-\left( \frac{p}{3u}\right)^{3}+q=0\Leftrightarrow u^{6}+qu^{3}-\frac{p^{3}}{27}=0,$$thus, u 3 solves a quadratic equation and
$$u^{3}=\frac{-q\pm\sqrt{\Delta}}{2},$$with Δ = q 2+4p 3/27. As v 3−u 3 = q, it follows that
$$v^{3}= \frac{q\pm\sqrt{\Delta}}{2}.$$Notice that as x = t−a/3 = u−v−a/3, the same results would be obtain if we change \(+\sqrt {\Delta }\) to \(-\sqrt {\Delta }\), we can thus consider, without loss of generality, only the case with \(+\sqrt {\Delta }\) and
$$u^{3}=-\frac{q+\sqrt{\Delta}}{2}, \: v^{3}=\frac{q+\sqrt{\Delta}}{2}.$$Depending on the sign of Δ, now we can reach conclusion about the nature of the roots x:
-
If Δ=0, then \(u=\{\sqrt [3]{-\frac {q}{2}},\sqrt [3]{-\frac {q}{2}}(-\frac {1}{2}-i\frac {\sqrt {3}}{2}),\sqrt [3]{-\frac {q}{2}}(-\frac {1}{2}+i\frac {\sqrt {3}}{2})\}\) and using the fact that \(3uv=p\in \mathbb {R,}\) we know that u and v must be conjugate. Substituting for x, we get
$$x=\left\{\sqrt[3]{\frac{q}{2}}-\frac{a}{3}, 2\sqrt[3]{-\frac{q}{2}}-\frac{a}{3}\right\}.$$and the roots are real with \(\left (2\sqrt [3]{-\frac {q}{2}}-\frac {a}{3}\right )\) being a simple root and \((\sqrt [3]{\frac {q}{2}}-\frac {a}{3})\) being a double root.
-
If Δ>0, then using the same arguments, we obtain
$$u^{3}=\frac{-q+\sqrt{\Delta}}{2}\in\mathbb{R}, \: v^{3}=\frac{q+\sqrt{\Delta}}{2}\in\mathbb{R},$$and
$$u_{1}= \sqrt[3]{\frac{-q+\sqrt{\Delta}}{2}} \in\mathbb{R},\: v_{1}=\sqrt[3]{\frac{q+\sqrt{\Delta}}{2}}\in\mathbb{R},$$$$u_{2}=\sqrt[3]{\frac{-q+\sqrt{\Delta}}{2}}\left( -\frac{1}{2}+i\frac{\sqrt{3}}{2}\right),\: v_{2}=\sqrt[3]{\frac{q+\sqrt{\Delta}}{2}}\left( -\frac{1}{2}-i\frac{\sqrt{3}}{2}\right),$$$$u_{3}=\sqrt[3]{\frac{-q+\sqrt{\Delta}}{2}}\left( -\frac{1}{2}-i\frac{\sqrt{3}}{2}\right),\: v_{3}=\sqrt[3]{\frac{q+\sqrt{\Delta}}{2}}\left( -\frac{1}{2}+i\frac{\sqrt{3}}{2}\right).$$We can then deduce \(x_{1}\in \mathbb {R}\), \(x_{2},\:x_{3}\in \mathbb {C}\).
-
If Δ<0, then
$$u^{3}=\left( \frac{-q+i\sqrt{-{\Delta}}}{2}\right)\in\mathbb{C},\: v^{3}=\left( \frac{q+i\sqrt{-{\Delta}}}{2}\right)\in\mathbb{C}.$$Using the trigonometric representation of a complex number, we can write
$$u^{3}=r(cos(\varphi)+i\sin(\varphi)),$$with \(r^{2}=\left (-\frac {q}{2}\right )^{2}-{\Delta }=\left (-\frac {p}{3}\right )^{3}\) and \(\cos (\varphi )=-\frac {q}{2\sqrt {(-\frac {p}{3})^{3}}}\). We know that
$$u=r^{1/3}\left( cos\left( \frac{\varphi}{3}\right)+isin\left( \frac{\varphi}{3}\right)\right)$$and similarly
$$v=r^{1/3}\left( -cos+isin\left( \frac{\varphi}{3}\right)\right).$$Then, \(x=\{2r^{1/3}cos(\frac {\varphi }{3})-\frac {a}{3},2r^{1/3}cos(\frac {\varphi +2\pi }{3})-\frac {a}{3},2r^{1/3}cos(\frac {\varphi +4\pi }{3})-\frac {a}{3}\}\) and the roots of Eq. 31 are distinct and real.
-
Now, we apply this derivation to our equations:
We want to find the roots (or at least their sign) of the cubic polynomial on the numerator:
when A<1 and B>2−A. First, using the Descartes’ rule of signs, we know that this polynomial has either two or no positive roots. Moreover, we know that \(P(n)\to +\infty \) (respectively \(-\infty \)) when \(n\to +\infty \) (respectively \(-\infty \)); P(0)=−(A−1)>0, \(P^{\prime }(0)=-(A+B-2)<0\). Now we apply Cardan’s method. Using the same notation given in the derivation above, we have
and thus
Denoting Δ as the determinant defined in the derivation above, we have:
-
If Δ>0, then there is only one real root and thus it cannot be positive. Moreover, as P(0)>0 and P(n) do not change sign for n>0, we conclude that P(n)>0 for all n>0,
-
If Δ=0, there are only two real roots and the simple one is \(2\sqrt [3]{-\frac {q}{2}}-\frac {a}{3}<0\). Denoting \(n^{*}_{2}\) as the second real root, we have \(P\left (n^{*}_{2}\right )=P^{\prime }\left (n^{*}_{2}\right )=0\) and P only changes sign at the simple root \(2\sqrt [3]{-\frac {q}{2}}-\frac {a}{3}<0\). As P(0)>0, we have P(n)≥0 when n>0,
-
If Δ<0, we know that the polynomial has three real roots \(n_{0}^{*},\:n_{1}^{*}\) and \(n_{2}^{*}\) such that
$$ P(n)=(n-n_{0}^{*})(n-n^{*}_{1})(n-n^{*}_{2}), $$(37)and knowing that P(0)>0 and \(P^{\prime }(0)<0\); this implies that \(n^{*}_{0}<0<n^{*}_{1}< n^{*}_{2}\), P(n)>0 when \(n\in (0,n^{*}_{1})\), P(n)<0 when \(n\in \left (n^{*}_{1},n^{*}_{2}\right )\) and P(n)>0 when \(n>n^{*}_{2}\).
As \(F(n)=\frac {-nP(n)}{1+n+n^{2}}\), we obtain the required conclusion about the shape of F.
Appendix D: Analysis of the dynamics of hybrid and invading genotypes for the hybridization scenario
D.1 Stability analysis of trivial equilibria in the hybridization model (11)–(12)
In this section, we detail the analysis of the two-dimensional ODE system (11)–(12) and more precisely the stability analysis of the trivial equilibrium (0,0). We first need to compute the Jacobian of the system at the trivial equilibrium:
where
and
The stability properties of (0,0) can be inferred from the sign of the trace and the determinant of the Jacobian at (0,0):
Indeed, the trivial equilibrium is stable if t r(J 0)<0 and d e t(J 0)>0. It is an unstable node or unstable spiral if d e t(J 0)>0 and t r(J 0)>0 and an unstable saddle if d e t(J 0)<0. We know from the positivity of the parameters that \(J^{0}_{12},J^{0}_{21}>0\), thus
and the eigenvalues of (0,0)
Both eigenvalues are real, which means that the trivial equilibrium is either a node (stable or unstable) or a saddle.
Note that the trace and the determinant of the Jacobian at (0,0) only depend on B I N and B H N , given that A H = A I = A were chosen to be fixed. Our goal is to determine the parameter space under which either the trace and the determinant are positive (and (0,0) will then be an unstable node) or the determinant is negative (and (0,0) will be an unstable saddle): if any of these conditions (t r(J 0),d e t(J 0)>0 or d e t(J 0)<0) are met, the trivial equilibrium (0,0) will become unstable. For the first case (i.e. both trace and det >0), we have the two following inequations:
and
But, when d e t(J 0)>0 then t r(J 0)<0. A d e t(J 0)>0 implies that
as we assumed that A−1<0 in Eq. 14, to meet a stable trivial equilibrium in Eq. 4. Thus, when hybridization is allowed, the trivial equilibrium (0,0) is either a stable node (d e t(J 0)>0 and t r(J 0)<0) or an unstable saddle (d e t(J 0)<0). The trivial equilibrium (0,0) is unstable and thus facilitation is warranted if, and only if, the determinant becomes negative, i.e when B I N and B H N are such that
Changing the values of the parameters B I N and/or B H N to move from a negative determinant to a positive determinant thus generates a saddle node bifurcation at (0,0).
D.2 Analysis of the null clines of the hybridization model (11)–(12)
In this section, we examine the mechanisms underlying the saddle node bifurcation of (0,0) by computing the null clines of Eqs. 11–12, i.e. the points (n I ,n H ) in the phase plane (n I ,n H ) such that
Note that the intersection of these null clines gives the equilibrium point(s). We computed these null clines for n I ,n H >0 (Fig. 8) with parameters A and B in Eq. 13 chosen so that 0 is stable in the model with a single species (here A=0.8, B=3). As can be inferred from Eq. 11, as well as shown in Fig. 8, the null cline for n I , i.e the curve such that \(n_{I}^{\prime }\equiv 0\), neither depends on B H N (Fig. 8a) nor on B I N (Fig. 8b). Therefore, if we change the values of these two parameters to change the stability of the trivial steady state (0,0) of Eqs. 11–12, only the null cline associated with the hybrid population n H changes. When B I N and B H N are very small (e.g. =0.5), there is no non-trivial equilibrium, i.e. the null clines of the two genotypes only intersect at the stable equilibrium (0,0). With this parameter setting, the invading genotype will go extinct even if it can hybridize with the native genotype. A small increase in B I N or B H N (e.g. =1) gives rise to three equilibrium points: (0,0), \(n^{1}=({n_{I}^{1}},{n_{H}^{1}})\) and \(n^{2}=({n_{I}^{2}},{n^{2}_{H}})\), where the null clines of the two genotypes intersect (Fig. 8). In this case, the trivial equilibrium is still stable (Fig. 3) but the stability of the two non-trivial equilibria requires further analysis (see below). Here, a low density of the invading genotype will again decline to 0. When large values of B I N and B H N were chosen (e.g. =2), the model resulted in one non-trivial equilibrium n 2 only (the intersection of solid black line and the dotted grey line in Fig. 8). In this case, (0,0) is unstable (Fig. 3) but n 2 is stable and the densities of invading and hybrid genotypes will converge to the non-trivial equilibrium n 2 (Appendix D.3). To understand what happens if the density of invading and hybrid genotype does not converge to the trivial equilibrium (0,0), we need to determine the stability of the non-trivial equilibria. To do so, we analysed the vector field of Eqs. 11–12 in more detail, as shown in Appendix D.3. The transition from a solution with two non-trivial equilibria to a solution with a single non-trivial equilibrium (Fig. 8) corresponds to a saddle node bifurcation at (0,0) (Fig. 3). As the parameters B I N and B H N increase, the intermediate equilibrium n 1 approaches the trivial equilibrium (0,0) (Fig. 8), leading to a saddle node bifurcation. When B I N and B H N were large enough so that d e t(J 0)<0, only two equilibria result, the trivial (0,0) which is now a saddle and the non-trivial n 2, which is stable.

Null clines for invading, genotype, \(n_{I}^{\prime }\equiv 0\) (solid black line) and hybrid genotype \(n_{H}^{\prime }\equiv 0\) (grey lines) for different B H N values (a) or B I N values (b) of 0.5 (solid grey line), 1.5 (dashed grey line), 2 (for B H N ) or 3 (for B I N ) (dotted grey line). The growth rate of the invading genotype is positive in the areas above its null cline (\(n^{\prime }_{I}\equiv 0\): solid black curve) but negative below it. For the hybrid genotype, positive growth rate occurs in the areas under the null clines (\(n^{\prime }_{H}\equiv 0\): grey lines) while it is negative above them. The solid circles show the intersections of the two null clines (black and grey curves) which correspond to different equilibria. Other parameters were B I N =1 (a) or B H N =1 (b), A=0.8 and B=3
D.3 Stability analysis of non-trivial equilibria in the hybridization model (11)–(12)
To investigate the stability of the non-trivial equilibrium point(s) of Eqs. 11–12, we analyse the vector field around the equilibria, as outlined in Murray (2002), chapter 7.3. We only provide the details for one scenario, the intermediate equilibrium n 1 (dotted line in Fig. 8), as the procedure is the same, to a large extent, for other non-zero equilibria. At this point n 1:
where F I and F H are the “growth” functions for the invading and hybrid genotypes in Eqs. 11–12, that is Eqs. 11 and 12 can be written in term of F I and F H :
Given that F I is positive above and negative below its null cline, \(n^{\prime }_{I}\equiv 0\), (the black curve in Fig. 8) whereas F H is negative above and positive below its null cline, \(n^{\prime }_{H}\equiv 0\), (the grey curve in Fig. 8) we can conclude that at the very vicinity of n 1,
and
This implies that \(det(J({n^{1}_{I}},{n^{1}_{H}}))<0\) so that the non-trivial equilibrium n 1 is a saddle. Using the same analysis for the other non-trivial equilibrium n 2 yields
and we can conclude that n 2 is stable. We also conclude from Fig. 8 that there exists a positively invariant set containing the equilibria and observe that there exists no limit cycle in this invariant domain. Using Poincaré-Bendixon theory (as in Murray (2002), chapter 7.3), we conclude that the solutions n I and n H of Eqs. 11–12 converge to an equilibrium which can only be (0 , 0 ) when it is stable or n 2 (when it exists).
Rights and permissions
About this article

Cite this article
Bouhours, J., Mesgaran, M.B., Cousens, R.D. et al. Neutral hybridization can overcome a strong Allee effect by improving pollination quality. Theor Ecol 10, 319–339 (2017). https://doi.org/10.1007/s12080-017-0333-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12080-017-0333-4