
Abstract
In this paper, the nonlinear dynamics of a cantilever-based capacitive energy harvesting device with out-of-plane gap closing scheme is investigated under large deformations. The frequency response of the micro-cantilever in these devices exhibits a softening behavior when subjected to large deformations, which can be exploited to increase the operational bandwidth of the device. However, linear beam theories fail to accurately predict the dynamic response of the system due to the nonlinearities induced by these large deformations, which demonstrates the importance of using nonlinear beam theories in design of such systems. Therefore, in this work, the micro-cantilever is modeled continuously based on a nonlinear Euler–Bernoulli beam theory which takes the curvature and inertia nonlinearities into account. The governing electric equation of the device is obtained by employing the Kirchhoff’s voltage law in the equivalent electric circuit of the system, which is coupled with the mechanical domain. The coupled nonlinear electro-mechanical equations of the device are discretized using Galerkin technique and are integrated numerically over time. The static and dynamic pull-in instability of the micro-cantilever is studied, and the performance of the device subjected to ambient vibrations is evaluated and analyzed by obtaining the frequency response of the system. In order to harvest the maximum energy in the bi-stable regions of the frequency response, a hoping voltage is introduced to force the system to settle to the steady-state response that has a larger oscillation amplitude.

















Similar content being viewed by others

References
Beeby SP et al (2007) A micro electromagnetic generator for vibration energy harvesting. J Micromech Microeng 17(7):1257
Türkyılmaz S, Zorlu Ö, Muhtaroğlu A, Külah H (2011) An electromagnetic micro-power generator for low frequency vibrations with tunable resonance. Proc Eng 25:729–732. https://doi.org/10.1016/j.proeng.2011.12.180
Belhaq M, Hamdi M (2016) Energy harvesting from quasi-periodic vibrations. Nonlinear Dyn 86(4):2193–2205. https://doi.org/10.1007/s11071-016-2668-6
Abed I, Kacem N, Bouhaddi N, Bouazizi ML (2016) Multi-modal vibration energy harvesting approach based on nonlinear oscillator arrays under magnetic levitation. Smart Mater Struct 25(2):025018
Abed I, Kacem N, Bouhaddi N, Bouazizi ML (2016) Nonlinear dynamics of magnetically coupled beams for multi-modal vibration energy harvesting 9799:97992C-97992C–8. https://doi.org/10.1117/12.2218410
Ghodsi GA, Jafari H, Ghazavi MR, Azizi S (2016) Analysis of the dynamics of an electro mechanical energy harvester beam based on piezoelectricity
Dai HL, Abdelkefi A, Wang L (2014) Piezoelectric energy harvesting from concurrent vortex-induced vibrations and base excitations. Nonlinear Dyn 77(3):967–981. https://doi.org/10.1007/s11071-014-1355-8
Abdelkefi A, Nayfeh AH, Hajj MR (2012) Global nonlinear distributed-parameter model of parametrically excited piezoelectric energy harvesters. Nonlinear Dyn 67(2):1147–1160. https://doi.org/10.1007/s11071-011-0059-6
Zhu JX, Lin J, Yuksek NS, Almasri M, Feng ZC (2015) Dynamic phenomena and analysis of MEMS capacitive power harvester subjected to low-frequency excitations. Nonlinear Dyn 79(1):673–688. https://doi.org/10.1007/s11071-014-1694-5
Wang F, Hansen O (2014) Electrostatic energy harvesting device with out-of-the-plane gap closing scheme. Sens Actuators A Phys 211:131–137. https://doi.org/10.1016/j.sna.2014.02.027
Boisseau S, Despesse G, Ricart T, Defay E, Sylvestre A (2011) Cantilever-based electret energy harvesters. Smart Mater Struct 20(10):105013
Ghavami M, Azizi S, Ghazavi MR (2018) On the dynamics of a capacitive electret-based micro-cantilever for energy harvesting. Energy 153:967–976. https://doi.org/10.1016/j.energy.2018.04.034
Guo X, Zhang Y, Fan K, Lee C, Wang F (2020) A comprehensive study of non-linear air damping and “pull-in” effects on the electrostatic energy harvesters. Energy Convers Manag 203:112264
Mahmoudi S, Kacem N, Bouhaddi N (2014) Enhancement of the performance of a hybrid nonlinear vibration energy harvester based on piezoelectric and electromagnetic transductions. Smart Mater Struct 23(7):075024
Firoozy P, Khadem SE, Pourkiaee SM (2017) Broadband energy harvesting using nonlinear vibrations of a magnetopiezoelastic cantilever beam. Int J Eng Sci 111:113–133. https://doi.org/10.1016/j.ijengsci.2016.11.006
Kaźmierski TJ, Beeby S (2010) Energy harvesting systems: principles, modeling and applications. Springer, New York
Peano F, Tambosso T (2005) Design and optimization of a MEMS electret-based capacitive energy scavenger. J Microelectromech Syst 14(3):429–435. https://doi.org/10.1109/JMEMS.2005.844803
Tsutsumino T, Suzuki Y, Kasagi N, Sakane Y (2006) Seismic power generator using high-performance polymer electret. In: 19th IEEE international conference on micro electro mechanical systems, 2006, pp 98–101. https://doi.org/10.1109/MEMSYS.2006.1627745
Sterken T, Fiorini P, Altena G, Van Hoof C, Puers R (2007) Harvesting energy from vibrations by a micromachined electret generator. In: 14th international conference on solid-state sensors, actuators and microsystems (Transducers 2007). IEEE, pp U68–U69
Tvedt LGW, Blystad LCJ, Halvorsen E (2008) Simulation of an electrostatic energy harvester at large amplitude narrow and wide band vibrations. In: 2008 Symposium on Design, Test, Integration and Packaging of MEMS/MOEMS, 9–11 April 2008, pp 296–301. https://doi.org/10.1109/DTIP.2008.4753005
Suzuki Y, Edamoto M, Kasagi N, Morizawa Y, Micro electret energy harvesting device with analogue impedance conversion circuit
Halvorsen E et al (2009) An electrostatic energy harvester with electret bias. Proc Transducers’ 09:1381–1384
Kloub H, Hoffmann D, Folkmer B, Manoli Y. A micro capacitive vibration energy harvester for low power electronics. Work 11(25) 1, 1740
Miki D, Honzumi M, Suzuki Y, Kasagi N (2010) Large-amplitude MEMS electret generator with nonlinear spring. In: 2010 IEEE 23rd international conference on micro electro mechanical systems (MEMS), 24–28 Jan. 2010, pp 176–179, https://doi.org/10.1109/MEMSYS.2010.5442536
Fu Q, Suzuki Y (2014) MEMS vibration electret energy harvester with combined electrodes. In: 2014 IEEE 27th international conference on micro electro mechanical systems (MEMS), 26–30 Jan. 2014, pp 409–412, https://doi.org/10.1109/MEMSYS.2014.6765663
Wang S, Bi M, Cao Z, Ye X (2019) Linear freestanding electret generator for harvesting swinging motion energy: optimization and experiment. Nano Energy 65:104013. https://doi.org/10.1016/j.nanoen.2019.104013
Tao K, Miao J, Lye SW, Hu X (2015) Sandwich-structured two-dimensional MEMS electret power generator for low-level ambient vibrational energy harvesting. Sens Actuators A Phys 228:95–103. https://doi.org/10.1016/j.sna.2015.02.021
Tao K, Lye SW, Miao J, Hu X (2015) Design and implementation of an out-of-plane electrostatic vibration energy harvester with dual-charged electret plates. Microelectron Eng 135:32–37. https://doi.org/10.1016/j.mee.2015.02.036
Genter S, Langhof T, Paul O (2015) Electret-based out-of-plane micro energy harvester with parylene-C serving as the electret and spring material. Proc Eng 120:341–344. https://doi.org/10.1016/j.proeng.2015.08.630
Zhang Y et al (2016) Electrostatic energy harvesting device with dual resonant structure for wideband random vibration sources at low frequency. Rev Sci Instrum 87(12):125001. https://doi.org/10.1063/1.4968811
Tao K, Tang L, Wu J, Lye SW, Chang H, Miao J (2018) Investigation of multimodal electret-based mems energy harvester with impact-induced nonlinearity. J Microelectromech Syst 27(2):276–288. https://doi.org/10.1109/JMEMS.2018.2792686
Zhang Y, Hu Y, Guo X, Wang F (2018) Micro energy harvester with dual electrets on sandwich structure optimized by air damping control for wireless sensor network application. IEEE Access 6:26779–26788. https://doi.org/10.1109/ACCESS.2018.2836381
Naruse Y, Matsubara N, Mabuchi K, Izumi M, Suzuki S (2009) Electrostatic micro power generation from low-frequency vibration such as human motion. J Micromech Microeng 19(9):094002
Boland JS, Messenger JDM, Lo KW, Tai YC (2005) Arrayed liquid rotor electret power generator systems. In: 18th IEEE international conference on micro electro mechanical systems, 2005. MEMS 2005, 30 Jan.-3 Feb. 2005, pp 618–621, https://doi.org/10.1109/MEMSYS.2005.1454005
Briand D et al (2015) Micro energy harvesting. Wiley
Nayfeh AH, Pai PF (2004) Linear and nonlinear structural mechanics. Wiley
Cheng DK (1989) Field and wave electromagnetics. Addison-Wesley Publishing Company
Younis MI (2011) MEMS linear and nonlinear statics and dynamics. Springer, US
Rahaeifard M, Kahrobaiyan MH, Asghari M, Ahmadian MT (2011) Static pull-in analysis of microcantilevers based on the modified couple stress theory. Sens Actuators A Phys 171(2):370–374. https://doi.org/10.1016/j.sna.2011.08.025
A. G. C. Ltd. (2009) CYTOP Amorphous fluoropolymer, 1 ed
Nayfeh AH, Younis MI, Abdel-Rahman EM (2007) Dynamic pull-in phenomenon in MEMS resonators. Nonlinear Dyn 48(1):153–163. https://doi.org/10.1007/s11071-006-9079-z
Azizi S, Ghodsi A, Jafari H, Ghazavi MR (2016) A conceptual study on the dynamics of a piezoelectric MEMS (Micro Electro Mechanical System) energy harvester. Energy 96:495–506. https://doi.org/10.1016/j.energy.2015.12.014
Azizi S, Ghazavi MR, Rezazadeh G, Ahmadian I, Cetinkaya C (2014) Tuning the primary resonances of a micro resonator, using piezoelectric actuation. Nonlinear Dyn 76(1):839–852
Author information
Authors and Affiliations
Corresponding author
Additional information
Technical Editor: Pedro Manuel Calas Lopes Pacheco.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix
Appendix
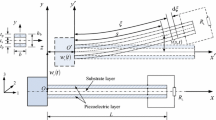
In this section, a nonlinear Euler–Bernoulli beam model is derived based on Newtonian dynamics for a micro-cantilever in a capacitive energy harvesting device under base excitation. Figure

(a) Schematic of the micro-cantilever in undeformed and deformed configuration (b) the centerline of an element on the micro-cantilever before and after deformation
18(a) shows a schematic of the capacitive micro-cantilever before and after deformation. The micro-cantilever has a length of L, width of b, and thickness of h, Young’s modulus of E, and mass density of ρ. Figure 18(b) demonstrates the centerline of an element on this micro-cantilever before and after deformation. As shown in this figure, the element undergoes both axial and vertical displacements, which are denoted by u and w, respectively.
To obtain the motion equation of the beam, the free body diagram of the beam element after deformation is considered. As shown in Fig.

Free body diagram of an element on the micro-cantilever
19, the beam element is subjected to different loads at its cross sections including axial force, N, shear force, V, and bending moment, M. The variation of these forces is assumed to be small along the element length, dx, which are approximated using Taylor expansion series up to the first order of dx. In addition, the element of the micro-cantilever is under electrostatic pressure, FE.
Using this free body diagram, three equilibrium equations can be written as follow:
-
1.
Newton’s second law of motion in horizontal direction:
$$\begin{aligned} & \left( {N + \frac{\partial N}{{\partial x}}{\text{d}}x} \right)\cos \left( {\theta + \frac{\partial \theta }{{\partial x}}{\text{d}}x} \right) - N\cos \theta + V\sin \theta - \left( {V + \frac{\partial V}{{\partial x}}{\text{d}}x} \right)\sin \left( {\theta + \frac{\partial \theta }{{\partial x}}{\text{d}}x} \right) \\ & \quad = \rho A{\text{d}}x\frac{{\partial^{2} u}}{{\partial t^{2} }} \\ \end{aligned}$$(24) -
2.
Newton’s second law in vertical direction gives:
$$\begin{aligned} & V\cos \theta - \left( {V + \frac{\partial V}{{\partial x}}{\text{d}}x} \right)\cos \left( {\theta + \frac{\partial \theta }{{\partial x}}{\text{d}}x} \right) - N\sin \theta + \left( {N + \frac{\partial N}{{\partial x}}{\text{d}}x} \right)\sin \left( {\theta + \frac{\partial \theta }{{\partial x}}{\text{d}}x} \right) - F_{{\text{E}}} \\ & \quad = \rho Adx\frac{{\partial^{2} w}}{{\partial t^{2} }} \\ \end{aligned}$$(25) -
3.
Moment equilibrium along y-axis:
$$M + \frac{\partial M}{{\partial x}}{\text{d}}x - M + V{\text{d}}x = J{\text{d}}x\frac{{\partial^{2} \theta }}{{\partial t^{2} }}$$(26)where J is the rotary inertia given by:
$$J = \int_{A} {\rho z^{2} {\text{d}}A}$$(27)
Further simplifying Eq. (26) yields:
To simplify Eqs. (24) and (25), the following triangular expansions are used:
Therefore, Eq. (24) reduces to:
Neglecting higher-order differential terms, Eq. (31) is further simplified as:
With a similar approach, Eq. (25) reduces to:
Integrating Eq. (32) over the length of the beam results in:
where C1 is the integration constant. There is no external axial force applied to the micro-cantilever at its free end (x = L). Applying this boundary condition to Eq. (34) yields:
Therefore, by substituting Eq. (35) into Eq. (34), an expression for the axial force within the micro-cantilever is obtained as follows:
According to Fig. 18b, the position of point P after deformation can be written as:
The variation of these positions can be expressed as:
Therefore, the final length of the beam element after deformation can be obtained:
Having the length of the element before and after deformation, the axial strain is obtained as follows:
A cantilever with no axial force applied to its free end is treated as an inextensional beam, which means the axial strain is neglected [36]. Applying the inextensionality condition to Eq. (42) results in:
By integrating Eq. (43) over the length of the beam, the axial deflection is obtained in terms of the transverse deflection as:
By substituting Eq. (44) into Eq. (36), the expression for the axial force reduces to:
By using Eq. (45), the axial displacement can be omitted from Eq. (33) as follows:
The following geometric relations can be written based on Fig. 18(b):
Due to the inextensionality condition, the length of the beam element remains unchanged before and after the deformation. Therefore, by making use Eqs. (39) and (40) along with Eq. (43), the expressions in Eqs. (47) and (48) take the following form:
Therefore:
The bending moment at the cross section of the beam can expressed in terms of axial stress, σ, as follows:
Considering the inextensionality condition, the strain in the direction can be obtained as [36]:
Therefore, by having the axial strain, the axial stress is obtained using the Hooke’s law for linear isotropic elastic materials as [36]:
Substituting Eq. (54) into Eq. (52), the expression for bending moment takes the following form:
where I is the moment of inertia of the micro-cantilever cross section with respect to x axis:
Therefore, the following expression is obtained for shear force by inserting Eq. (55) into Eq. (28):
Substituting Eq. (51) along with Eq. (57) into Eq. (46), the governing equation of the motion in terms of transverse deflection and rotation angle is obtained as:
By relating the rotation angle and the transverse deflection, the motion equation in Eq. (58) can be expressed only in terms of the transverse deflection. From Eq. (49), one can obtain:
Therefore:
The following parameters are considered for simplicity:
Therefore, Eq. (60) can be written as:
Using the following expansion series:
and considering only the first two terms, Eq. (62) is approximated as follows:
Since the rotary inertia is small, the nonlinear terms can be neglected in Eq. (64). Therefore:
On the other hand, from Eq. (59):
For simplicity, the following parameters are introduced:
Therefore, Eq. (66) takes the following form:
Using the expansion series given in Eq. (63) within Eq. (68) and keeping the nonlinear terms up to the third-order yield:
Additionally, the following terms can be approximated using the same expansion series:
Finally, by substituting Eqs. (65), (69), (70), and (71) into Eq. (58), the nonlinear equation of motion for the micro-cantilever is obtained only in terms of the transverse deflection as:
For a micro-cantilever subjected to base excitation, the total deflection can be written as:
where \(\hat{w}\left( {x,t} \right)\) is the transverse deflection of the beam with respect to its base, and wb(t) is the base excitation. Substituting the expression in Eq. (73) (72) into Eq. (72), rearranging the terms yields, and removing the hat notation for brevity, we obtain:
Rights and permissions
About this article

Cite this article
Ghavami, M., Azizi, S. & Ghazavi, M.R. Dynamics of a micro-cantilever for capacitive energy harvesting considering nonlinear inertia and curvature. J Braz. Soc. Mech. Sci. Eng. 44, 124 (2022). https://doi.org/10.1007/s40430-021-03301-0
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s40430-021-03301-0