
Abstract
We present our current best estimate of the plausible observing scenarios for the Advanced LIGO, Advanced Virgo and KAGRA gravitational-wave detectors over the next several years, with the intention of providing information to facilitate planning for multi-messenger astronomy with gravitational waves. We estimate the sensitivity of the network to transient gravitational-wave signals for the third (O3), fourth (O4) and fifth observing (O5) runs, including the planned upgrades of the Advanced LIGO and Advanced Virgo detectors. We study the capability of the network to determine the sky location of the source for gravitational-wave signals from the inspiral of binary systems of compact objects, that is binary neutron star, neutron star–black hole, and binary black hole systems. The ability to localize the sources is given as a sky-area probability, luminosity distance, and comoving volume. The median sky localization area (90% credible region) is expected to be a few hundreds of square degrees for all types of binary systems during O3 with the Advanced LIGO and Virgo (HLV) network. The median sky localization area will improve to a few tens of square degrees during O4 with the Advanced LIGO, Virgo, and KAGRA (HLVK) network. During O3, the median localization volume (90% credible region) is expected to be on the order of \(10^{5}, 10^{6}, 10^{7}\mathrm {\ Mpc}^3\) for binary neutron star, neutron star–black hole, and binary black hole systems, respectively. The localization volume in O4 is expected to be about a factor two smaller than in O3. We predict a detection count of \(1^{+12}_{-1}\)(\(10^{+52}_{-10}\)) for binary neutron star mergers, of \(0^{+19}_{-0}\)(\(1^{+91}_{-1}\)) for neutron star–black hole mergers, and \(17^{+22}_{-11}\)(\(79^{+89}_{-44}\)) for binary black hole mergers in a one-calendar-year observing run of the HLV network during O3 (HLVK network during O4). We evaluate sensitivity and localization expectations for unmodeled signal searches, including the search for intermediate mass black hole binary mergers.
Similar content being viewed by others


1 Introduction
Advanced LIGO (Aasi et al. 2015a), Advanced Virgo (Acernese et al. 2015), and KAGRA (Somiya 2012; Aso et al. 2013) are kilometer-scale gravitational-wave (GW) detectors that are sensitive to GWs with frequencies of \(\sim 20\)–\(2000\,{\mathrm {Hz}}\).Footnote 1 The era of GW astronomy began with the detection of GW150914 (Abbott et al. 2016i), a signal from the coalescence of a binary black hole (BBH); the first confirmed multi-messenger counterpart to a GW observation came with GW170817 (Abbott et al. 2017i), a signal from a binary neutron star (BNS) coalescence which was accompanied by detections across the electromagnetic spectrum (Abbott et al. 2017j). In this article, we describe the schedule, sensitivity, sky-localization accuracy, and expected detections for the GW-detector network. We discuss the past, present, and future planned sequence of observing runs and the prospects for multi-messenger astronomy.
The purpose of this article is to provide information to the astronomy community to assist in the formulation of plans in the era of GW observations. In particular, we intend this article to provide the information required for assessing the features of programs for joint observation of GW events using electromagnetic, neutrino, or other facilities (e.g., Abbott et al. 2016h, 2017j; Adrian-Martinez et al. 2016; Albert et al. 2017a, b).
The full science of ground-based GW detectors is broad (Abbott et al. 2018e), and is not covered in this article. We concentrate solely on candidate GW transient signals. We place particular emphasis on the coalescence of binary systems of compact objects, such as BNS and neutron star–black hole (NSBH) systems, which are the GW sources for which electromagnetic follow-up is most promising (Goodman 1986; Paczynski 1986; Eichler et al. 1989; Li and Paczynski 1998; Kulkarni 2005; Rosswog 2005; Metzger et al. 2010; Roberts et al. 2011; Abadie et al. 2012b, c; Evans et al. 2012; Metzger and Berger 2012; Nissanke et al. 2013; Kasen et al. 2013; Barnes and Kasen 2013; Tanaka and Hotokezaka 2013; Aasi et al. 2014a; Grossman et al. 2014; Ciolfi and Siegel 2015; Ghirlanda et al. 2016; Paschalidis 2017; Rosswog et al. 2017; Foucart et al. 2018; Barbieri et al. 2019; Metzger 2020), and BBHs, which are the most commonly detected source (Abbott et al. 2016b, 2017f, 2018a, c). No electromagnetic emission is expected for vacuum BBH mergers (Centrella et al. 2010), but is possible if there is surrounding material (Schnittman 2013), for example, remnants of mass lost from the parent star (Perna et al. 2016; Janiuk et al. 2017) or if the binary was embedded in a common envelope (Woosley 2016), or a disk of an active galactic nucleus (Bartos et al. 2017; Stone et al. 2017). Mergers of binary systems of compact objects are absolute distance indicators, and thus can be used as standard sirens to estimate the Hubble constant (Schutz 1986; Holz and Hughes 2005; Dalal et al. 2006; Nissanke et al. 2010; Abbott et al. 2017a). When an electromagnetic counterpart, and hence a host galaxy cannot be identified, a statistical approach which uses galaxy catalogs and the GW localization volume can be used (Del Pozzo 2012; Chen et al. 2018; Fishbach et al. 2019; Soares-Santos et al. 2019). For more general introductory articles on GW generation, detection and astrophysics, we point readers to Blanchet (2014), Pitkin et al. (2011) and Sathyaprakash and Schutz (2009).
As the detector network grows and evolves we will release updated versions of this article: This is the fourth version. The plausible observing scenarios for the upcoming observing runs includes KAGRA and the upgrades of the Advanced LIGO (aLIGO) and Advanced Virgo (AdV) detectors, called A+ and AdV+, respectively. The predicted sky-localization accuracies and detection rates have been updated and now incorporate the atsrophysical results from the first and second observing runs (Abbott et al. 2018a, c). Changes with respect to the previous version (Aasi et al. 2016) are listed in Appendix A. Throughout the paper we assume a flat cosmology with Hubble parameter \(\mathrm{H}_{0} = 67.9 \ {\mathrm{km}}\ \mathrm{s}^{-1} {\mathrm{Mpc}}^{-1}\), and density parameters \(\Omega _{\mathrm{m}} = 0.3065\) and \( \Omega _{\Lambda } = 0.6935\) (Ade et al. 2016).
2 Construction, commissioning and observing phases
We divide the development of the GW observatories into three phases:
-
Construction: includes the installation and testing of the detectors. This phase ends with acceptance of the detectors. Acceptance means that the interferometers can lock for periods of hours: light is resonant in the arms of the interferometer with no guaranteed GW sensitivity. Construction incorporates several short engineering runs with no astrophysical output as the detectors progress towards acceptance. The aLIGO construction project ended in March 2015. The construction of AdV was completed in early 2017. Construction of KAGRA will be completed by mid-late 2019.
-
Commissioning: improves the detectors’ performance with the goal of reaching design sensitivity. Engineering runs in the commissioning phase allow us to understand our detectors and analyses in an observational mode; these are not intended to produce astrophysical results, but that does not preclude the possibility of this happening.Footnote 2 Rather than proceeding directly to design sensitivity before making astrophysical observations, commissioning is interweaved with observing runs.
-
Observing: begins when the detectors have reached (and can stably maintain) a significantly improved sensitivity compared with previous operation. Observing runs produce astrophysical results such as direct detections from certain GW sources and upper limits on the rates or energetics of others. During the first two observing runs (O1 and O2) a Memorandum Of Understanding (MOU) governed the exchange of GW candidates between astronomical partners and the LIGO and Virgo Collaborations. From the start of the third observing run (O3) GW event candidates identified in low-latency are released immediately to the full astronomical community (see Sect. 4 for details). KAGRA will become a part of the global network with full data sharing in the latter half of O3.
Commissioning is a complex process which involves both scheduled improvements to the detectors and tackling unexpected new problems. While our experience makes us cautiously optimistic regarding the schedule for the advanced detectors, it is not possible to make concrete predictions for sensitivity or duty cycle as a function of time.
As a standard figure of merit for detector sensitivity, we use the range, R, evaluated for CBCs consisting of representative masses. We define V as the orientation-averaged spacetime volume surveyed per unit detector time, assuming a matched-filter detection signal-to-noise ratio (SNR) threshold of 8 in a single detector. The volume V corresponds to the comoving volume with the inclusion of a \((1 + z)\) factor to account for time dilation (redshifted volume \({V_z}\) in Chen et al. 2017). For a population of sources with a constant comoving source-frame rate density, V multiplied by the rate density gives the detection rate of those sources by the particular detector. The range R is obtained as \((4\pi /3){R}^3 ={V}\). For further insight into the range, and a discussion of additional quantities such as the median and average distances to sources, see (Chen et al. 2017).
For unmodeled short-duration (\(\lesssim 1\,\mathrm {s}\)) signals or bursts, we evaluate an approximate sensitive luminosity distance determined by the total energy \(E_{\mathrm {GW}}\) emitted in GWs, the central frequency \(f_0\) of the burst, the detector noise power spectral density \(S(f_0)\), and the single-detector SNR threshold \(\rho _\mathrm {det}\) (Sutton 2013):
This distance is then corrected by the time dilation cosmology factor to obtain the surveyed volume V, and the range R.
2.1 O1: aLIGO
O1 began on 18 September 2015 and ended on 12 January 2016. Data from the surrounding engineering periods were of sufficient quality to be included in the analysis, meaning that observational data was collected from 12 September 2015 to 19 January 2016. The run involved the Hanford (H) and Livingston (L) detectors (Abbott et al. 2016e; Martynov et al. 2016). We aimed for a BNS range of 60–80 Mpc for both instruments (see Fig. 1), and achieved a 80 Mpc range.

aLIGO (top left), AdV (top right) and KAGRA (bottom) target strain sensitivities as a function of frequency. The quoted range is for a \(1.4\,M_{\odot }+1.4\,M_{\odot }\) BNS merger. The BNS range (in megaparsec) achieved in past observing runs and anticipated for future runs is shown. The O1 aLIGO curve is taken from the Hanford detector, the O2 aLIGO curve comes from Livingston. In each case these had the better performance for that observing run. The O3 curves for aLIGO and AdV reflect recent performance. For some runs the anticipated ranges are shown as bands reflecting the uncertainty in the impact of improvements and upgrades to the overall sensitivity. Detailed planning for the post-O3 to O4 period is now in progress and may result in changes to both target sensitivities for O4 and the start date for this run. The KAGRA BNS curve may be realized by detuning the signal recycling cavity to significantly improve the BNS range to 155 Mpc once design sensitivity is reached
The localizations of the three BBH events detected during this run (GW150914, GW151012,Footnote 3 GW151226), exhibit the characteristic broken arc for a two-detector network (Abbott et al. 2016b, h, 2018c). GW150914 and GW151226 were shared with partner astronomers soon after detection. Their poor localization (the 90% credible regions are given in Table 3) made the follow-up challenging (Abbott et al. 2016h, l; Adrian-Martinez et al. 2016; Albert et al. 2017b). See Sect. 3.3 for more discussion of the O1 and O2 follow-up program.
In O1 the largest non-observing periods for each detector were due to Locking and Environmental issues (see Table 1). Locking refers to the amount of time spent in bringing the interferometers from an uncontrolled state to their lowest noise configuration (Staley et al. 2014). Environmental effects include earthquakes, wind and the microseism noise arising from ocean storms (Effler et al. 2015; Abbott et al. 2016c). The latter two effects have seasonal variation, with the prevalence of storms being higher during the winter months. The Livingston detector has a greater sensitivity to microseism noise and to earthquakes than Hanford, mainly due to the local geophysical environment (Daw et al. 2004).
2.2 O2: aLIGO joined by AdV
O2 began on 30 November 2016 and ended on 25 August 2017. It was preceded by an engineering run which began on 31 October 2016 at Livingston and on 14 November 2016 at Hanford. The delay at Hanford was to facilitate extra commissioning activities. The achieved sensitivity across the run was typically a BNS range of 80–100 Mpc (Abbott et al. 2018c).
The AdV interferometer (V; Acernese et al. 2015) joined O2 on 1 August 2017, forming a three detector network for the last month of the run. The goal was a BNS range of 40 Mpc. Because of a vacuum contamination issue, which has since been resolved, AdV used steel wires, rather than fused silica fibers, to suspend the test masses. This limited the highest possible BNS range for AdV; in O2 the BNS range achieved was 30 Mpc. The aLIGO and AdV sensitivities are shown in Fig. 1.
Of the eight GW signals detected during O2, five were localized by the three detector LIGO-Hanford, LIGO-Livingston and Virgo (HLV) network. From Table 3 we see that GW170818 was localized to a 90% credible region of \(39\,{\mathrm {deg}}^2\) making it the best localized BBH detection to date (Abbott et al. 2018c). GW170817, the first detection of a BNS merger, was localized to a 90% credible region of \(16\,{\mathrm {deg}}^2\). The enhanced accuracy is due to the addition of AdV to the network. The discoveries associated with this detection are highlighted in Sect. 3.3. An overview of the extensive multi-messenger observations accompanying GW170817 is given in Abbott et al. (2017j).
In O2 the aLIGO detectors saw some improvement in duty factors from operating during non-winter months, with an almost 50% reduction in the fraction of time lost to environmental effects at both sites (see Table 1). O2 also saw a rise in the fraction of time spent in planned engineering: it was a longer run and hence included a dedicated break in observations to effect needed repairs and to attempt improvements to the sensitivity. During O1 and O2, Livingston lost over twice as much observing time to earthquakes, microseism noise and wind compared to Hanford. For the aLIGO instruments improvements to control systems, the locking process, and the addition of extra sensors (Coughlin et al. 2017; Biscans et al. 2018; Ross et al. 2017; Venkateswara et al. 2014) may lead to modest increases in the duty factor of the aLIGO instruments. The Virgo instrument operated with a duty factor of approximately 85% after joining O2 and similar performance is expected during O3.
Our expectations from earlier versions of this document that we expect duty factors of at most 70–75% for each LIGO instrument during extended runs are borne out by experience. Assuming unplanned downtime periods are uncorrelated among detectors, these duty factor estimates imply that all detectors in a three-detector network will be operating in coincidence approximately 34– 42% of the time, and at least two detectors will be operating for 78– 84% of the time. For a four-detector network, three or more detectors will be operational around 65– 74% of the time, and for a five-detector network, three of more detectors will be operating for 84– 90% of the time. The weekly maintenance period for aLIGO instruments overlaps for three of the 4 h. The timezone difference makes overlapping the AdV and aLIGO maintenance periods impractical. Longer planned engineering interruptions may take place at the same time across the network, so these coincidence times are conservative estimates.
2.3 O3: aLIGO, AdV and KAGRA
The third observing run started on April 1, 2019 and was expected to end on April 30, 2020, with a commissioning break from October 1, 2019 to November 1, 2019. While this article was in review the COVID-19 Pandemic led to suspension of the observing run on March 27, 2020. The increase in sensitivity of the LIGO detectors (whose target sensitivity was expected to be 120 Mpc) comes from a variety of changes, chiefly from increasing the input laser power, adding a squeezed vacuum source at the interferometer output and mitigating noise arising from scattered light. Additionally, end test-mass optics with lower-loss coatings, along with new reaction masses, have been installed in each interferometer. The Livingston instrument began the run with an average BNS range of 130 Mpc and the Hanford instrument typically operates with an average range of 110 Mpc.
Fused silica fibers were installed on the AdV test mass suspensions in preparation for O3. Other improvements included reduction of technical noises, increasing the input laser power and installation of a squeezed vacuum source. The result was a BNS range of 50 Mpc at the start of O3.
The KAGRA detector (K; Somiya 2012; Aso et al. 2013) is located at the Kamioka underground site. The first operation of a detector in an initial configuration with a simple Michelson interferometer occurred in March 2016 (Akutsu et al. 2018). The detector is now being upgraded to its baseline design configuration. Initial operation was made in April–May 2018, in a simple Michelson configuration with a single end test mass cryogenically cooled to 20 K and the other test mass at room temperature. Subsequently, all the optical components have been installed and the test masses will be cryogenically cooled to reduce thermal noise. Early observations may come in late-2019–early 2020 with a range of 8–25 Mpc; KAGRA intends to join the network for the latter part of O3. The exact timing of observations has yet to be decided.
2.4 Commissioning and observing roadmap
The anticipated strain sensitivity evolution for aLIGO, AdV and KAGRA is shown in Fig. 1. In Table 2 we present values of the range for different detector networks and GW sources (BNSs, BBHs, NSBHs, and unmodelled signals, such as from the core-collpase of massive starsFootnote 4). In previous versions of this paper, an option to optimize the detector sensitivity for a specific class of astrophysical signals, such as BNS mergers was discussed. Given the success of the aLIGO and AdV instruments and the approval of the new upgrades Advanced LIGO Plus (A+) and Advanced Virgo Plus (AdV+), such an optimization is no longer planned for these instruments.
Assuming that no unexpected obstacles are encountered, the aLIGO detectors are expected to achieve design sensitivity with a BNS range of 160–190 Mpc in O4. A configuration upgrade after O3 will increase the range of AdV to 90–120 Mpc in O4. KAGRA is currently intending participate fully in O4 with a BNS range of 25–130 Mpc. Owing to the cryogenic test mass suspension system, mirror coating thermal noise is expected to be lower than quantum noise. KAGRA will retain the option of optimizing the quantum noise by detuning the signal recycling cavity and significantly improve the BNS range to 155 Mpc.
Upgrading the existing instruments will enable LIGO and Virgo to increase their range with respect to the aLIGO and AdV detector design sensitivities. The A+ upgrade to the aLIGO instruments will include higher power, frequency-dependent squeezing and, crucially, new test masses with improved coating thermal noise. Facilities modifications to incorporate the filter cavity required for frequency-dependent squeezing will begin after O3. The full A+ configuration, adding improved test masses and balanced homodyne readout, is expected to be in place for O5. The AdV+ upgrade will occur in two phases. Phase 1 installation will begin after O3 and will involve adding signal recycling, frequency-dependent squeezing, higher input laser power (to 50 W from 20 W currently) and cancellation of Newtonian noise. Phase 2 will be implemented between O4 and O5 and will include input laser power increase to 200 W, 100 kg test masses and better optical coatings. Discussion of upgrades to increase the sensitivity of KAGRA in advance of O5 have begun, but the detailed plan and expected sensitivity are still being formulated.
The original aLIGO design called for three identical 4-km interferometers, two at Hanford and one at Livingston. In 2011, the LIGO Lab and the IndIGOFootnote 5 consortium in India proposed installing one of the aLIGO Hanford detectors at a new observatory in India (LIGO-India; Iyer et al. 2011). In early 2015, the LIGO Laboratory placed this interferometer in long-term storage for use in India. The Government of India granted in-principle approval to LIGO-India in February 2016. This detector will be configured, including upgrades, identically to the other LIGO instruments. Operation is anticipated in 2025.
GEO 600 (Lück et al. 2010; Dooley et al. 2016) will continue to operate as a GW detector beyond O3 as techniques for improving the sensitivity at high frequency are investigated (Affeldt et al. 2014). At its current sensitivity, it is unlikely to contribute to detections. By around 2021 with a deliberate focus on high frequency narrow-band sensitivity at a few kilohertz, GEO 600 may contribute to the understanding of BNS merger physics, as well as sky localization for such systems. In the meantime, it will continue observing with frequent commissioning and instrument science investigations related to detuned signal recycling and novel applications of squeezed light, as well as increasing the circulating power and levels of applied squeezing (Abadie et al. 2011a; Grote et al. 2013; Aasi et al. 2013a; Brown et al. 2017).
Third-generation observatories, such as the Einstein TelescopeFootnote 6 (Punturo et al. 2010), or Cosmic ExplorerFootnote 7 (Abbott et al. 2017d), are envisioned in the future. It is also possible that for some sources, there could be multiband GW observations. The space-borne Laser Interferometer Space Antenna (LISA)Footnote 8 (Amaro-Seoane et al. 2017) could provide early warning and sky localization (Sesana 2016), as well as additional information on system parameters (Vitale 2016), formation mechanisms (Nishizawa et al. 2016a, b; Breivik et al. 2016) and tests of general relativity (Barausse et al. 2016). These future observatories are beyond the scope of this paper.
2.5 Envisioned observing schedule
Keeping in mind the important caveats about commissioning affecting the scheduling and length of observing runs, the following are plausible scenarios for the operation of the ground-based GW detector network over the next decade:
-
2019–2020 (O3): A year-long run (started April 1, 2019) with the aLIGO detectors at 110–130 Mpc and AdV at 50 Mpc. KAGRA plans to join for the latter part of the run with a range of 8–25 Mpc. A 1-month commissioning break for the LIGO and Virgo instruments is scheduled to begin October 1, 2019. To preserve the 12 month O3 observing period, the end date for O3 is now planned to be April 30, 2020. Possible extensions of the run will be limited so that O3 will end no later than June 30, 2020.
-
Late 2021/Early 2022–Late 2022/Early 2023 (O4): A four-detector network with the two aLIGO instruments at 160–190 Mpc; Phase 1 of AdV+ at 90–120 Mpc and KAGRA at 25–130 Mpc. The projected sensitivities and precise dates of this run are now being actively planned and remain fluid.
-
Late 2024/Early 2025–2026 (O5): O5 will begin with a four-detector network incorporating the A+ upgrade for the aLIGO instruments and the AdV+ Phase 2 upgrade for Virgo. The target range for aLIGO is 330 Mpc and for AdV it is 150–260 Mpc. KAGRA will operate at or above its O4 sensitivity of 130 Mpc.
-
2025+: With the addition of an upgraded aLIGO interferometer in India we will have a five-detector network: three aLIGO detectors with a design sensitivity of 330 Mpc, AdV at 150–260 Mpc and KAGRA at 130+ Mpc.
This timeline is summarized in Fig. 2.Footnote 9 Detailed planning for the post-O3 period is in progress and may result in significant changes to both target sensitivities and uncertainty in the start and end times of the planned observing runs, especially for those further in the future. As the network grows to include more detectors, sky localization will improve (Klimenko et al. 2011; Veitch et al. 2012; Nissanke et al. 2013; Rodriguez et al. 2014; Pankow et al. 2018), as will the fraction of observational time with multiple instruments on-sky. The observational implications of these scenarios are discussed in Sect. 5.

The planned sensitivity evolution and observing runs of the aLIGO, AdV and KAGRA detectors over the coming years. The colored bars show the observing runs, with achieved sensitivities in O1, O2 and O3, and the expected sensitivities given by the data in Fig. 1 for future runs. There is significant uncertainty in the start and end times of the planned observing runs, especially for those further in the future, and these could move forward or backwards relative to what is shown above. Uncertainty in start or finish dates is represented by shading. The break between O3 and O4 will last at least 18 months. O3 is expected to finish by June 30, 2020 at the latest. The O4 run is planned to last for one calendar year. We indicate a range of potential sensitivities for aLIGO during O4 depending on which upgrades and improvements are made after O3. The most significant driver of the aLIGO range in O4 is from the implementation of frequency-dependent squeezing. The observing plan is summarised in Sect. 2.5
3 Searches and localization of gravitational-wave transients
Data from GW detectors are searched for many types of possible signals (Abbott et al. 2018e). Here we focus on signals from CBCs, including BNS, NSBH and BBH systems and generic unmodeled transient signals.
Observational results of searches for transient signals are reported in detail elsewhere (Abbott et al. 2016b, d, j, o, 2017b, f, g, h, i, k, 2018c, g). The O1 and O2 results include ten clear detections originating from BBH coalescences and GW170817 which is the first detection of a BNS coalescence (Abbott et al. 2017i, 2018c). The public release of the LIGO and Virgo data allows researchers to perform independent analyses of the GW data. Some of these analyses report a few additional significant BBH event candidates (Zackay et al. 2019; Venumadhav et al. 2019, 2020). No other type of transient source has been identified during O1 and O2 (Abbott et al. 2016o, 2017b, l, 2018c).
Using the observation of GW170817, we estimate a BNS event rate of 110–3840 Gpc−3 year−1 (Abbott et al. 2018c). This rate is obtained by combining the results over different search pipelines and two different astrophysical populations, which assume a uniform mass distribution in the \(1\,M_\odot \)–\(2\,M_\odot \) range for the NSs, and a Gaussian mass distribution (Özel and Freire 2016) centered at \(1.33\,M_\odot \) with a standard deviation of \(0.09\,M_\odot \). Compatible estimates for the merger rate were derived from the rate of electromagnetic transients similar to the counterpart of GW170817 (Siebert et al. 2017; Kasliwal et al. 2017; Smartt et al. 2017; Yang et al. 2017; Zhang et al. 2018). Rate estimation based upon astrophysical population models and observations of Galactic BNS systems remains an active area of research. The BNS merger rate inferred from O1 and O2 is close to the most optimistic values predicted by current astrophysical population models (e.g., Abadie et al. 2010b; Kim et al. 2013; Dominik et al. 2015; Vangioni et al. 2016; de Mink and Belczynski 2015; Eldridge et al. 2017, 2019; Belczynski et al. 2017; Kruckow et al. 2018; Mapelli and Giacobbo 2018; Giacobbo and Mapelli 2018; Barrett et al. 2018; Klencki et al. 2018; Spera et al. 2019; Pol et al. 2019; Chruslinska et al. 2019; Artale et al. 2019).
From the observations of BBHs during O1 and O2, we infer that their rate of mergers is 9.7–101 Gpc−3 year−1 (Abbott et al. 2018c). This rate combines results from different search pipelines and two astrophysical populations; a population of BBHs with primary mass following a power law distribution of index \(\alpha =-2.3\), and a population of BBHs with primary mass distribution uniform in the log. For both populations, masses are cut off at a lower mass of \(5\,M_\odot \) and at a maximum mass of \(50\,M_\odot \) (Abbott et al. 2018a, c). Using a power law mass distribution with flexible values for the power law index, and the minimum and maximum masses (Model B in Abbott et al. 2018a), the BBH rate is estimated to be 25–109 Gpc−3 year−1. The non-detection of NSBHs in O1 and O2 allows us to place a 90% upper limit of the merger rate of 610 Gpc−3 year−1 (Abbott et al. 2018c).
For the purpose of detection, the gravitational waveform from the inspiral phase of a BNS coalescence is well modeled and matched filtering can be used to search for signals (Lindblom et al. 2008; Buonanno et al. 2009; Brown et al. 2012; Read et al. 2013; Abbott et al. 2016d; Harry et al. 2016). For systems containing black holes, or in which the component spin is significant, uncertainties in the waveform model can reduce the sensitivity of the search (Nitz et al. 2013; Harry et al. 2014; Taracchini et al. 2014; Pan et al. 2014; Dal Canton et al. 2015; Schmidt et al. 2015; Khan et al. 2016; Bustillo et al. 2017).
Searches for unmodeled transients make few assumptions on the signal morphology, using time–frequency decompositions to identify statistically significant excess-power transients in the data. The search for these transients focuses mainly on short-duration signals (\(\lesssim 1\,\mathrm {s}\)), but is also used for much longer signals (Abbott et al. 2019a). Their astrophysical targets include core-collapse supernovae, magnetar flares, BNS post-merger remnants, and as-yet-unknown systems (e.g., Klimenko et al. 2008; Sutton et al. 2010; Chassande-Mottin et al. 2010; Thrane et al. 2011; Adams et al. 2013; Thrane and Coughlin 2013; Cornish and Littenberg 2015; Thrane et al. 2015; Kanner et al. 2016). Expected detection rates for these transient sources are lower and/or less well constrained than CBCs. The burst search is complementary to the CBC search for BBH coalescences. It spans a larger parameter space with good efficiency to search for non-standard-BBHs, possible non-GR events, BBHs with eccentricity larger than 0.2, high-mass BBH systems, and intermediate mass black hole binaries (IMBHBs; Abadie et al. 2012e; Aasi et al. 2014c; Abbott et al. 2017l, 2019e, f). The search for short-duration gravitational-wave transients includes cosmic string cusps for which the waveform is well-modeled, and a matched-filter search is performed (Abbott et al. 2018b, 2019b).
During the observing runs, CBC and unmodeled searches are carried out in near real-time to rapidly identify event candidates and deliver prompt notice of potential GW transients enabling follow-up observations in the electromagnetic spectrum. Increased detection confidence, improved sky localization, identification of a host galaxy, and the source redshift are just some of the benefits of joint GW–electromagnetic observations. Here, we focus on two points of particular relevance for the rapid detection of GW transients and for the follow-up of candidate GW events: the GW signal significance and the source localization afforded by a GW detector network.
3.1 Detection and false alarm rates
Detection pipelines search the data looking for signal-like features. Candidate triggers flagged by a pipeline are assigned a detection statistic to quantify how signal-like they are. For CBC searches, this involves matching a bank of waveform templates (Sathyaprakash and Dhurandhar 1991; Owen 1996; Owen and Sathyaprakash 1999; Babak et al. 2006; Cokelaer 2007; Prix 2007; Harry et al. 2009; Ajith et al. 2014; Brown et al. 2012; Capano et al. 2016; Dal Canton and Harry 2017) to the data (Abbott et al. 2016d, b); for unmodeled searches, requirements on waveform morphology are relaxed, but coherence of the signal in multiple detectors is required (Abbott et al. 2016j, 2017b). A detection statistic is used to rank candidates; we assess significance by comparing results with those from an estimated background distribution of noise triggers. It is difficult to theoretically model the behaviour of non-Gaussian noise, and therefore the distribution must be estimated from the data (Abadie et al. 2010a, 2012a; Babak et al. 2013; Abbott et al. 2016a, b, d, j, 2017b; Capano et al. 2017; Messick et al. 2017; Nitz et al. 2017). From the background noise distribution we can map a value of the detection statistic to a false alarm rate (FAR), the expected rate of triggers with detection statistics equal to or greater than that value, assuming that the data contain no signals. While each pipeline has its own detection statistic, they all compute a FAR. The FAR, combined with the observation time, may then be used to calculate a p value, the probability of there being at least one noise trigger with a FAR this low or lower in the observed time. The smaller the FAR or p value of a trigger, the more significant it is, and the more likely that it is of astrophysical origin.
The p value is distinct from the probability that a trigger is a real astrophysical GW signal, which we indicate as \(p_{\mathrm {astro}}\). The p value assumes that the data contain no signals, whereas the probability of there being a GW must include the hypothesis that there is an astrophysical signal. Thus, to calculate \(p_{\mathrm {astro}}\) requires an extra layer of inference, folding in both our knowledge of trigger distribution, assumptions about signal distribution (such as that sources are uniformly distributed in volume), and knowledge and assumptions about merger rate per unit volume for each class of sources. A method to evaluate \(p_{\mathrm {astro}}\) is described in Abbott et al. (2016b, m, n, 2018c) and Kapadia et al. (2020). The \(p_{\mathrm {astro}}\) is given in the public GW alerts (see Sect. 4). Details on how it is evaluated in low-latency are given in the the LIGO/Virgo Public Alerts User Guide.Footnote 10
The rate of noise triggers above a given detection statistic depends critically upon the data quality of the advanced detectors; non-stationary transients or glitches (Aasi et al. 2012, 2015b; Abbott et al. 2016c; Dal Canton et al. 2014a) produce an elevated background of loud triggers. Over 200, 000 auxiliary channels record data on instrumental and environmental conditions (Effler et al. 2015; Abbott et al. 2016c). These channels act as witnesses to disturbances that may couple into the GW channel (Berger 2018; Walker et al. 2018; Covas et al. 2018; Zevin et al. 2017). However, it is not always possible to identify what produces certain glitches. An intensive study of the quality of the data is used to veto stretches ranging from seconds to hours in duration (Nuttall et al. 2015). When a significant problem with the data is identified or a known instrumental issue affects the searches’ background, the contaminated data are removed from the analysis data set. Our experience to date is that this removes a small percentage of the data. For CBC searches, the waveforms are well modeled, and signal consistency tests reduce the background significantly (Allen 2005; Cannon et al. 2015; Usman et al. 2016). For burst sources which are not well modeled, or which spend only a short time in the detectors’ sensitive band, it is more difficult to distinguish between the signal and a glitch. Consequently a reduction of the FAR threshold comes at a higher cost in terms of reduced detection efficiency.
Search pipelines are run both online, analysing data as soon as they are available in order to provide low-latency alerts of interesting triggers, and offline, taking advantage of improved calibration of the data and additional information regarding data quality. In Fig. 3, we show the results of the offline transient searches performed during O1 and O2. In each plot we show the observed distribution of events as a function of inverse false alarm rate (IFAR), as well as the expected background for the analysis. The FAR of the eleven confident gravitational wave detections are reported in the GWTC-1 catalog (Abbott et al. 2018c) and (Abbott et al. 2019b). Full strain data from O1 and O2, as well as auxiliary data for GW events and software to analyze GW data, are publicly available from the LIGO and Virgo Gravitational Wave Open Science CenterFootnote 11 (Vallisneri et al. 2015). Publication of a GW event is accompanied by the release of strain data around the time of that event. Data from O3 and subsequent runs will be available at the same location (Anderson and Williams 2017).

Cumulative histograms of triggers obtained by the offline searches plotted versus the IFAR. The top panel shows results for the matched-filter searches; on the left the PyCBC (Dal Canton et al. 2014b; Usman et al. 2016) search pipeline, and on the right the GstLAL (Cannon et al. 2012; Privitera et al. 2014; Messick et al. 2017; Sachdev et al. 2019) search pipeline. The bottom panels show unmodeled searches performed by the \(\textsc {cWB}\) (Klimenko et al. 2008, 2016) pipeline; on the left looking for stellar-mass BBHs mergers, and on the right for generic transients. The dashed lines show the expected background, given the analysis time. Shaded regions denote the sigma uncertainty bounds for the Poisson statistic. The blue dots are the confident GW events found by each search. Any events with a measured or bounded inverse false alarm rate greater than 3000 years are shown with a right pointing arrow. The values of the FARs of the confident events can be found in Abbott et al. (2017b, 2018c, 2019b)
3.2 Localization
Following the detection of a GW transient, posterior probability distributions for the position are constructed following a Bayesian framework (Veitch et al. 2015; Cornish and Littenberg 2015; Singer and Price 2016; Abbott et al. 2016k), with information for the sky localization coming from the time of arrival, plus the phase and amplitude of the GW signal.
An intuitive understanding of localization can be gained by considering triangulation using the observed time delays between sites (Fairhurst 2009, 2011). The effective single-site timing accuracy is approximately
where \(\rho \) is the SNR in the given detector and \(\sigma _f\) is the effective bandwidth of the signal in the detector, typically of order 100 Hz. Thus a typical timing accuracy is on the order of \(10^{-4}\,\mathrm {s}\) (about 1/100 of the typical light travel time between sites, which is of order \(10\,{\mathrm {ms}}\)). This sets the localization scale. The simple model of Eq. (2) ignores many other relevant issues such as information from the signal amplitudes and phases across the detector network, uncertainty in the emitted gravitational waveform, and instrumental calibration accuracies. The source sky location of CBC signals is currently evaluated by introducing the requirement of phase and amplitude consistency between detectors (Grover et al. 2014; Fairhurst 2017). A Bayesian inference algorithm constructs posterior probability distributions for the system parameters—location, mass, distance, orientation, etc.—by matching GW models to the detector strain (Cutler and Flanagan 1994; Röver et al. 2007a, b; Fairhurst 2009, 2017; Vitale and Zanolin 2011; Vitale et al. 2012; Nissanke et al. 2011, 2013; Veitch et al. 2012; Jaranowski and Królak 2012; Aasi et al. 2013b; Singer et al. 2014; Berry et al. 2015; Singer and Price 2016; Abbott et al. 2017c).
Source localization using only timing for a two-site network yields an annulus on the sky; see Fig. 4. Adding the signal amplitude and phase (and also precession effects) resolve this to only parts of the annulus. However, even then sources will be localized to regions of hundreds to thousands of square degrees (Singer et al. 2014; Berry et al. 2015).

Image adapted from Chatterji et al. (2006)
Source localization by timing triangulation for the aLIGO–AdV–KAGRA network. The locations of the four detectors are indicated by black dots, with LIGO Hanford labeled H, LIGO Livingston as L, Virgo as V and KAGRA as K. The locus of constant time delay (with associated timing uncertainty) between two detectors forms an annulus on the sky concentric about the baseline between the two sites (labeled by the two detectors). For clarity we omit the HK and LV combinations. For four or more detectors there is a unique intersection region, S.
For three detectors, the time delays restrict the source to two sky regions which are mirror images with respect to the plane passing through the three sites. Requiring consistent amplitudes and phase in all the detectors typically eliminates one of these regions (Fairhurst 2017). This typically yields regions with areas of several tens to hundreds of square degrees. If there is a significant difference in sensitivity between detectors, the source is less well localized and we may be left with the majority of the annulus on the sky determined by the two most sensitive detectors. With four or more detectors, timing information alone is sufficient to localize to a single sky region, and the additional baselines help to localize within regions smaller than ten square degrees for some signals.
From Eq. (2), it follows that the linear size of the localization ellipse scales inversely with the SNR of the signal and the frequency bandwidth of the signal in the detector (Berry et al. 2015). For GWs that sweep across the band of the detector, such as CBC signals, the effective bandwidth is \(\sim 100\,{\mathrm {Hz}}\). Higher mass CBC systems merge at lower frequencies and so have a smaller effective bandwidth. For burst signals, the bandwidth \(\sigma _f\) depends on the specific signal. For example, GWs emitted by various processes in core-collapse supernovae are anticipated to have relatively large bandwidths, between 150 and 500 Hz (Dimmelmeier et al. 2008; Ott 2009; Yakunin et al. 2010; Ott et al. 2011). By contrast, the sky localization region for narrowband burst signals may consist of multiple disconnected regions and exhibit fringing features; see, for example, Klimenko et al. (2011), Abadie et al. (2012c) and Essick et al. (2015).
The sky localization of GW events confidently detected during O1 and O2 and sent in low-latency is shown in the top plot of Fig. 5. The refined sky localization obtained offline by the parameter estimation analysis is shown in the bottom plot of the same figure. The offline analyses exploit refined instrumental calibration, noise subtraction, updated estimates of the amplitude power spectral density, and extended template banks (Abbott et al. 2018c, 2019d). The plots show that even if the posterior probability is primarily distributed along a ring, the ring is broken into disconnected components determined by the sensitivity of the individual detectors. The events detected by the two LIGO interferometers show the expected trend of the sky area to scale inversely with the square of the SNR (Abbott et al. 2018c). Five of the 11 confident events were observed with the three-site HLV network (see Table 3). The Virgo data were used to estimate the low-latency sky localization for two events (GW170814 and GW170817). With the contribution from the third detector we were able to significantly shrink the localization to areas covering a few tens of square degrees (see GW170814, GW170817, GW170718).

Sky locations of GW events confidently detected in O1 and O2. Top panel: initial sky location released in low-latency to the astronomers (Abbott et al. 2016h; LIGO Scientific Collaboration and Virgo Collaboration 2015; Abbott et al. 2019d). Bottom panel: refined sky location including updated calibration and final choice of waveform models (Abbott et al. 2018c). Three events (GW151012, GW170729, GW170818) among the 11 confidetent detections were identified offline, and were not shared in low-latency. The shaded areas enclose the 90% credible regions of the posterior probability sky areas in a Mollweide projection. The inner lines enclose regions starting from the 10% credible area with the color scheme changing with every 10% increase in confidence level. The localization is shown in equatorial coordinates (right ascension in hours, and declination in degrees). The HLV label indicates events for which both the LIGO and Virgo data were used to estimate the sky location
In addition to localizing sources on the sky, it is possible to provide distance estimates for CBC signals since the waveform amplitude is inversely proportional to the luminosity distance (Veitch et al. 2015; Abbott et al. 2016k). Uncertainty in distance measurement is dominated by the degeneracy with the inclination of the binary, which also determines the signal amplitude (Cutler and Flanagan 1994; Röver et al. 2007a; Nissanke et al. 2010; Aasi et al. 2013b). The degeneracy could be broken by observing with more non-co-aligned detectors (Veitch et al. 2012; Rodriguez et al. 2014), or if precession of the orbital plane is observed (Vecchio 2004; van der Sluys et al. 2008; Vitale et al. 2014), but this is not expected for slowly spinning BNS (Farr et al. 2016). Distance information can further aid the hunt for counterparts, particularly if the localization can be used together with galaxy catalogs (Abadie et al. 2012c; Nissanke et al. 2013; Hanna et al. 2014; Fan et al. 2014; Blackburn et al. 2015; Singer et al. 2016a; Del Pozzo et al. 2018). Table 3 reports the low-latency and refined estimates for the luminosity distance and the sky localization (90% credible region) of the eleven confident signals detected during O1 and O2.Footnote 12
Some GW searches are triggered by electromagnetic observations, and in these cases initial localization information is typically available a priori. For example, in GW searches triggered by gamma-ray bursts (Abadie et al. 2012d; Aasi et al. 2014b, d; Abbott et al. 2017k), the triggering space-based telescope provides a localization. The rapid identification of a GW counterpart to such a trigger will prompt longer and deeper follow-up in different wavelengths that may not always be done in response to gamma-ray bursts (cf. Abbott et al. 2017j). This is particularly important for gamma-ray bursts with larger sky localization uncertainties, such as those reported by Fermi-GBM (Meegan et al. 2009), which are not followed up as frequently as the bursts reported by the Neil Gehrels Swift Observatory (Gehrels et al. 2004) or Fermi-LAT (Atwood et al. 2009), which provide good sky localization. In the case of GW170817, the LIGO–Virgo localization was tighter than the localization from Fermi-GBM and INTEGRAL (Abbott et al. 2017e; Goldstein et al. 2017a; Savchenko et al. 2017a) and showed that the source was nearby (\(40^{+8}_{-14}\,{\mathrm {Mpc}}\); Abbott et al. 2017i), making it a prime target for further follow-up. Other possible targets for externally-triggered GW searches are electromagnetic or neutrino emission from soft-gamma ray repeaters and pulsar glitches (Abadie et al. 2008, 2011b; Lasky 2015; Abbott et al. 2019g). All GW data are stored permanently, so that it is possible to perform retroactive analyses at any time.
3.2.1 Localization for compact binary coalescences
Providing prompt localizations for GW signals helps to maximise the chance that electromagnetic observatories can find a counterpart. Localizations are produced at several different latencies, with updates coming from more computationally expensive algorithms that refine our understanding of the source.
For CBC signals, rapid localization is performed using bayestar (Singer and Price 2016), a Bayesian parameter-estimation code that computes source location using output from the detection pipeline. bayestar produces sky localizations (as in Fig. 5, top plot) with latencies of only a few seconds. It also provides distance estimates (Singer et al. 2016a). These are communicated as an additional component of the sky localization (3D sky map): for each line of sight, the distance posterior probability is approximated as a Gaussian multiplied by the distance squared (Singer et al. 2016a, b).Footnote 13 Results from bayestar are shared in low latency for prompt electromagnetic/neutrino follow-up.
At higher latency, the CBC parameter estimation is performed using the Bayesian inference algorithms of LALInference (Veitch et al. 2015), which constructs posterior probability distributions for the system parameters, and not just location like bayestar. Computing waveforms for a large number of source parameters is computationally expensive; this expense increases as the detectors’ low-frequency sensitivity improves and waveforms must be computed down to lower frequencies. The quickest LALInference binary system coalescence follow-up is computed using waveforms that do not include the full effects of component spins (Singer et al. 2014; Berry et al. 2015; Abbott et al. 2017f). Localizations are reported with latency of hours to several days. Parameter estimation is then performed using more accurate waveform approximants, those that include full effects of spin precession and the effects of tidal distortions of neutron stars (Farr et al. 2016; Abbott et al. 2016g, 2017f, i). Provided that BNSs are slowly spinning (Mandel and O’Shaughnessy 2010), the restrictions on the spins should cause negligible difference between the mid-latency LALInference and the high-latency fully spinning LALInference localizations (Farr et al. 2016). Methods of reducing the computational cost are actively being investigated (e.g., Canizares et al. 2013; Pürrer 2014; Canizares et al. 2015; Smith et al. 2016; Vinciguerra et al. 2017). Parameter estimation through Bayesian inference is an active field of research and new algorithms are currently being considered (Ashton et al. 2019).
Differences between the bayestar and LALInference localizations are expected to be negligible, except in the case of strong precession of the binary system (Farr et al. 2016), because bayestar uses the maximum likelihood template from the low-latency detection pipelines which do not currently include precession. Differences among the low- and mid-latency sky maps are possible as improvements are made in the handling of data calibration and the characterisation of the noise. Significant shifts and shape changes of the sky maps, such as for GW170814 (Abbott et al. 2019d), are expected only in the case of problems in the data calibration, data quality or glitch treatment.Footnote 14
Figure 6 shows the expectations for the sky localization of astrophysically motivated populations of BNS, NSBH, and BBH signals during O3 and O4. For O3, we consider two scenarios; the HLV network, and the HLVK network. For O4, we consider only the HLVK network. We assume a source to be detected if it has SNR larger than 4 in at least two detectors and a network SNR larger than 12. This is a conservative threshold, considering that some of the GW events confidently detected in O1 and O2 have a network SNR smaller than 12 (Abbott et al. 2018c). It is also larger than the SNR threshold (of about 8.5) corresponding to the FAR used to release GW candidate alerts associated with binary systems of compact objects during O3 (see Sect. 4). We use: 1) a population of BNSs with component masses drawn from a Gaussian distribution with mean 1.33 and standard deviation 0.09, and spins aligned or anti-aligned with uniformly distributed magnitudes smaller than 0.05; 2) a population of BBHs with the primary masses distributed as a power-law with index of \(\alpha \,=\,-2.3\), mass range 5–\(50\,M_{\odot }\), and spins aligned or anti-aligned with uniformly distributed magnitudes smaller than 0.99, and 3) a NSBH population with the mass and spin distributions described for the BNSs and BBHs. The merger rate density is assumed constant in the comoving frame and source-frame time. The results of our simulation are quantified using the GW signal sky-localization area, luminosity distance, and comoving volume. Sky-localization area (volume) is given as the 90% credible region, defined as the smallest area (volume) enclosing 90% of the total posterior probability. This coresponds to the area (volume) of the sky that must be covered to have a 90% chance of including the source.

Anticipated GW sky localization for CBC signals during the third and fourth runs (for O3, see Sect. 5.1 and for O4, see Sect. 5.2). For O3, the detector sensitivities were taken to be representative of the first 3 months of observations for aLIGO Hanford and Livingston, and AdV, and the highest expected O3 sensitivity for KAGRA (see Fig. 1). For O4, the detector sensitivities were taken to be the target sensitivities for aLIGO and AdV, and the mid of the interval expected for KAGRA during O4. Top: The plot shows the cumulative fractions of events with sky-localization area smaller than the abscissa value. Central: The plot shows the cumulative fractions of events with luminosity distance smaller than the abscissa value. Bottom: The plot shows the cumulative fractions of events with comoving volume smaller than the abscissa value. Sky-localization area (comoving volume) is given as the 90% credible region, the smallest area (comoving volume) enclosing 90% of the total posterior probability. Results are obtained using the low-latency bayestar pipeline (Singer and Price 2016). The simulation accounts for an independent 70% duty cycle for each detector, and the different sensitivity of each sub-network or network of detectors. For O3, all the combinations of sub-networks of two operating detectors and the three detector network (HLV) are included in the blue lines. All the combinations of sub-networks of two and three operating detectors, and the four detector network (HLVK) are included in the orange lines for O3 and in the green lines for O4. The O3 HLV and the O3 HLVK curves in the central panel are very similar due to the modest contribution by KAGRA to the network SNR. Solid lines represent BNSs, dashed lines NSBHs, dotted lines BBHs. As a comparison, the plots show the area, distance and volume of GW170817 and GW170818, which are the best localized BNS and BBH signals during O1 and O2
During O3 the expected four-detector localizations are only slightly better than the three-detector ones (the median 90% credible area is reduced by about 30%). This is due to the limited sensitivity of KAGRA with respect to the other detectors, which only significantly improves the localization of loud signals. A large improvement of the localization capability (area and volume) is shown for O4, where the expanded network of detectors is accompanied by higher sensitivies. The 90% credible regions for the area and the volume are shown in Table 5 and discussed further in Sects. 5.1 and 5.2. The effects on the sky localization of BNS and NSBH signals from assuming different astrophysical mass and spin distributions is discussed in Pankow et al. (2019).
LALInference has the ability to include the effects of the detectors’ calibration uncertainty on parameter estimation (Abbott et al. 2016b, k). Initial results for GW150914 assumed a calibration uncertainty of 10% for the amplitude of the GW strain and \(10\,{\mathrm {deg}}\) for its phase (Abbott et al. 2017c). Incorporating this calibration uncertainty into the analysis, the 90% credible area was \(610\,{{\mathrm {deg}}}^2\) (Abbott et al. 2016k). By the end of O1, the calibration uncertainty had been improved, such that the 90% credible area was \(230\,{{\mathrm {deg}}}^2\) (Abbott et al. 2016b). If the detectors were assumed to be perfectly calibrated, such that calibration uncertainty could be ignored, the 90% credible area would be \(150\,{{\mathrm {deg}}}^2\). The sky localization is particularly sensitive to calibration uncertainty, while distance is less affected. For GW150914, the initial distance estimate was \(410_{-180}^{+160}\,{\mathrm {Mpc}}\) (Abbott et al. 2016k), the estimate at the end of the run was \(420_{-180}^{+150}\,{\mathrm {Mpc}}\), and the equivalent result without calibration uncertainty was \(420_{-170}^{+140}\,{\mathrm {Mpc}}\) (Abbott et al. 2016b). The effects of calibration uncertainty depend upon the signal’s SNR, bandwidth and the position of the source relative to the detectors. For example, for GW151226, GW151012 and GW170104, there is negligible difference between the sky areas or distances with and without final calibration uncertainties (Abbott et al. 2016b, 2017f).
The targets for O3 on the calibration uncertainties are < 3% for the amplitude of the GW strain and \(<2\,{\mathrm {deg}}\) for its phase at 68% confidence interval, from 20 to 1024 Hz. This includes a site-to-site timing uncertainty of \(\sim 1\,\mu \hbox {s}\). This information is folded into the parameter estimation of CBC candidate events over which the uncertainties are marginalized. The current techniques for this marginalization are discussed in Farr et al. (2015).
3.2.2 Localization for unmodeled signals
Sky localizations are also produced for unmodeled triggers and distributed for follow up. The lowest latency sky localizations are produced as part of the coherent Wave Burst (cWB) detection pipeline (Klimenko et al. 2008, 2016). Sky localizations are produced using a constrained likelihood algorithm that coherently combines data from all the detectors. The \(\textsc {cWB}\) sky localizations are calculated with a latency of a few minutes.
Following detection, an unmodeled burst signal is analyzed by parameter-estimation codes: LALInferenceBurst (LIB), a stochastic sampling algorithm similar to the LALInference code used to reconstruct CBC signals (Veitch et al. 2015), and BayesWave, a reversible jump Markov-chain Monte Carlo algorithm that models both signals and glitches (Cornish and Littenberg 2015). LIB uses sine–Gaussian waveforms (in place of the CBC templates used by LALInference), and can produce sky localizations in a few hours. BayesWave uses a variable number of sine–Gaussian wavelets to model the signal and the glitches while also fitting for the noise spectrum using BayesLine (Littenberg and Cornish 2015); it produces sky localizations with a latency of minutes.
The sky-localization performance of unmodeled algorithms depends upon the type of signal. Studies of burst localization using BayesWave in the first year of the advanced-detector era, and using \(\textsc {cWB}\) and LIB in the first 2 years have been completed in Bécsy et al. (2017) and Essick et al. (2015), respectively. These works show results for a variety of waveform morphologies that could be detected in a burst search (Abadie et al. 2012c): Gaussian, sine-Gaussian, broadband white-noise and BBH waveforms.
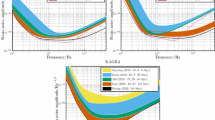
We present sky localization results obtained by \(\textsc {cWB}\) for two astrophysically motivated populations, which are expected to emit signals detectable by burst searches: the mergers of BBHs and the mergers of IMBHBs. We assume a population of BBHs with total mass less than \(100\,M_{\odot }\), distribution of the primary mass uniform in the log, component masses in the 5–\(50\,M_{\odot }\) range, and isotropic distribution of the spin. The population of IMBHBs is composed of black holes of individual mass \(100\,M_{\odot }\), and with spins aligned with the binary orbital angular momentum. To search for these signals \(\textsc {cWB}\) identifies regions of excess power in the time-frequency representation of the gravitational strain. The search pattern is optimized with a different selection of pixels tuned for BBHs and IMBHBs, respectively. The \(\textsc {cWB}\) searches optimized for BBH and IMBHB currently run in low-latency together with the standard \(\textsc {cWB}\). Figure 7 shows the sky localization area for BBHs (Left plots) and IMBHBs (Right plots) for the LIGO network (HL), for the LIGO and Virgo network (HLV), and the LIGO, Virgo and KAGRA network (HLVK)Footnote 15 during O3 (Top plots) and O4 (Bottom plots). The median BBH sky-localization obtained with the unmodeled search is 490 (220) \({{\mathrm {deg}}}^2\) with three (four) detectors in O3. It reduces to about 90 \({{\mathrm {deg}}}^2\) in O4 with four sensitive detectors. The IMBHB sky-localization is larger; 730 (510) \({{\mathrm {deg}}}^2\) with HLV (HLVK) in O3, and 360 \({{\mathrm {deg}}}^2\) with HLVK in O4. The anticipated ranges of the \(\textsc {cWB}\) searches for BBH mergers and IMBHB mergers during O3 and O4 are reported in Table 4. The unmodeled searches for BBHs and IMBHBs are able to reach ranges up to the gigaparsec scale.

Simulated sky localization for unmodeled searches for mergers of BBHs and mergers of IMBHBs. The simulation uses a population of BBHs with the distribution of the primary mass uniform in the log, component masses in the 5–\(50\,M_{\odot }\) range and isotropic distribution of the spin. The population of IMBHBs is composed of black holes of individual mass \(100\,M_{\odot }\), and with spins aligned with the binary orbital angular momentum. The plots show the cumulative fractions of events with 90% credible areas smaller than the abscissa value. The results obtained by the low-latency Coherent Wave Burst pipeline (Klimenko et al. 2005, 2008, 2016) for the third (Top plots—O3) and fourth observing runs (Bottom plots—O4) consider separately the HL, HLV and HLVK networks (without including sub-networks). These specific network configurations will be operating for a limited interval of time during the run. Assuming an instrument duty cycle of 70%, the HL network and HLV network would be operational 14% and 34% of the time during O3. Once KAGRA joins the observations, the HL, HLV, and HLVK networks will be operational 4%, 10%, and 24% of the time, respectively. The detection thresholds for \(\textsc {cWB}\) are set to 0.7 for the network correlation coefficient and 12 for the network SNR (see Abbott et al. 2018c). Shaded regions denote the 1-sigma uncertainty
3.3 The O1 and O2 follow-up program
During the first (O1) and second (O2) observing runs, GW candidate alerts were sent privately to groups of astronomers who signed an MOU with the LIGO Scientific Collaboration (LSC) and Virgo collaborations. At the end of O2, the follow-up program included 95 groups, with capabilities to search for electromagnetic counterparts from very high-energy to the radio band, and to search for neutrino counterparts. The low-latency identification and validation of GW signal candidates, and the distribution of alerts is detailed in Abbott et al. (2019d). Only candidates with a FAR below a threshold of once per 2 months were selected to trigger the search for counterparts. Properties of the GW candidates were distributed using the Gamma-ray Coordinates Network (GCN) system,Footnote 16 widely used in the astronomical community for the multiwavelength follow-up of gamma-ray bursts. The GCNs included event time, sky localization probability map, and the estimated FARs. For compact binary merger candidates, they also included volume localization (3D sky map), probability of the system to contain a neutron star and probability to be electromagnetically bright (based on the estimate of the baryon mass left outside the merger remnant, Foucart 2012; Pannarale and Ohme 2014).
Seventeen alerts were sent to the astronomers during O1 and O2. Among them seven signals are confident detections originating from BBHs (Abbott et al. 2016f, i, 2017f, g, h, 2018c) and one confident signal from a BNS, GW170817 (Abbott et al. 2017i). Four BBH mergers were detected in low-latency by the aLIGO interferometers, while three BBH mergers (GW170809, GW170814, GW170823), and the BNS merger GW170817 were observed with Advanced Virgo as part of the network of GW detectors. The inclusion of the third detector significantly improves the sky localization for the majority of these events (see e.g. Abbott et al. 2017h, 2018c), and consequently the efficiency of searches for electromagnetic counterparts.
For each GW trigger, tens of teams responded to the alert and operated ground- and space-based instruments spanning 19 orders of magnitude in electromagnetic wavelength (see e.g.; Abbott et al. 2016h; Cowperthwaite et al. 2016; Smartt et al. 2016; Racusin et al. 2017; Evans et al. 2016b; Palliyaguru et al. 2016; Abbott et al. 2017j, and references therein) The search for electromagnetic signatures of the GW source includes analysis of archival data around the time of the GW trigger, follow-up by covering the sky map or targeting the galaxies in the GW localization, and photometric and spectroscopic follow-up of the electromagnetic counterpart candidates by larger telescopes to remove contaminants and characterize the source. No firm electromagnetic counterpart has been found for any of the detected BBHs. A weak transient was found in Fermi-GBM data \(0.4\,\mathrm {s}\) after GW150914 (Connaughton et al. 2016; Bagoly et al. 2016; Connaughton et al. 2018; Burns et al. 2019), and a weak signal was found in the AGILE-MCAL data \(0.46\,\mathrm {s}\) before GW170104 (Verrecchia et al. 2017), but neither signal was confirmed by other satellites (Savchenko et al. 2016, 2017b; Tavani et al. 2016; Hurley et al. 2016; Goldstein et al. 2017b).
GW170817 was the first GW transient consistent with the coalescence of a BNS (Abbott et al. 2017i) and with the first firm electromagnetic counterpart (Abbott et al. 2017j). A prompt gamma-ray signal GRB 170817A (Goldstein et al. 2017a) was detected \(\sim 1.7\,\mathrm {s}\) after the merger time by Fermi-GBM, and later confirmed by INTEGRAL (Savchenko et al. 2017a). The three-detector GW localization led to the discovery of the bright transient AT 2017gfo by the One-Meter, Two-Hemisphere team with the 1-m Swope Telescope (Coulter et al. 2017), and confirmed by other teams within an hour (Soares-Santos et al. 2017; Valenti et al. 2017; Arcavi et al. 2017; Tanvir et al. 2017; Lipunov et al. 2017). Observations from the near infrared to the ultraviolet showed a transient thermal emission with a blue component fading within 2 days and a red-ward evolution in 1 week (e.g., Villar et al. 2017). An X-ray signal (Troja et al. 2017; Margutti et al. 2017; Haggard et al. 2017; Ruan et al. 2018; Pooley et al. 2017) and a radio signal (Hallinan et al. 2017; Alexander et al. 2017; Mooley et al. 2018) were discovered at the position of the optical transient after \({\sim }9\,{\mathrm {days}}\) and \({\sim }16\,{\mathrm {days}}\), respectively. A slow multi-wavelength flux-rise of the non-thermal emission was observed until \({\sim }150\,{\mathrm {days}}\) (Lyman et al. 2018; Margutti et al. 2018; Troja et al. 2018) before entering a flattening-decaying phase (D’Avanzo et al. 2018; Dobie et al. 2018; Alexander et al. 2018; Hajela et al. 2019; Fong et al. 2019). Very Long Baseline Interferometry observations enabled measurement of the superluminal proper motion of the radio counterpart (Mooley et al. 2018) and constrained the apparent size of the source (Ghirlanda et al. 2019), proving that a relativistic and narrowly-collimated jet successfully emerged from the neutron star merger. These multimessenger observations support the hypothesis that GW170817 came from a BNS coalescence, which was the source of the short GRB 170817A (Goldstein et al. 2017a; Savchenko et al. 2017a) and of the kilonova powered by the radioactive decay of r-process nuclei produced in the collision (Pian et al. 2017; McCully et al. 2017; Smartt et al. 2017; Chornock et al. 2017; Nicholl et al. 2017; Shappee et al. 2017; Kasliwal et al. 2017; Evans et al. 2017).
4 Public alerts
To facilitate the rapid identification of electromagnetic or neutrino counterparts to GW detections, and to maximize the science that the entire scientific community can do with them, GW candidate events are released as public alerts as of the start of O3.Footnote 17
Within minutes of detection Preliminary GCN Notices are issued automatically for a candidate that satisfies pre-established criteria. After each Preliminary GCN Notice, a Rapid Response Team (RRT), composed of staff from the detector sites, the analysis teams, the detector characterization team, and the low-latency follow-up team, are called upon to confirm or retract the candidate on the basis of semi-automated detector characterization and data quality checks. Events which are expected to be electromagnetically bright such as BNS or NSBH mergers require vetting by the full RRT. BBH mergers are also inspected by the RRT but the issuance of a circular or retraction may have a latency of up to 1 day. For non-BBH events our goal is to issue an Initial GCN Notice accompanied by either a GCN Circular, or a Retraction GCN Notice within a few hours.
Interesting events, which do not satisfy our criteria for issuing an automatic alert are discussed in ad hoc daily meetings. Alerts generated by such events may have a latency on the order of 1 day.
Update GCN Notices and Circulars are issued whenever further analysis leads to improved estimates of the source localization, significance, or classification. Localization updates are sent until the position is determined more accurately by public announcement of an unambiguous counterpart. Figure 8 shows the timeline of the different types of GCN Notices after a GW signal. Update GCN Notices and Circulars may be issued hours, days, or even weeks after the event.

Image adapted from the LIGO/Virgo Public Alerts User Guide (see footnote 17)
Alert timeline. The Preliminary GCN Notice is sent autonomously within 1–10 min after the GW candidate trigger time. Some preliminary alerts may be retracted after human inspection for data quality, instrumental conditions, and pipeline behavior. The human vetted Initial GCN Notice or Retraction GCN Notice and associated GCN Circular are distributed within a few hours for BNS or NSBH sources and within 1 day for BBH. Update notices and circulars are sent whenever the estimate of the parameters of the signal significantly improves.
4.1 O3 false alarm rate threshold for automatic alerts
The FAR threshold to release automatic alerts for CBC events targets an overall astrophysical purity of 90% across all categories of mergers. Different classes of CBCs may individually have higher or lower purity than 90%. This 90% purity translates to a FAR threshold of 1/(2 months) for CBC. For the unmodeled burst events the FAR threshold is 1/year. Single detector CBC candidates, which are found in coincidence with a multi-messenger source, must still satisfy the FAR threshold of 1/(2 months) in order to generate an automatic alert. In general multiple pipelines search for CBC and Burst candidates. Individual FAR thresholds for each pipeline are corrected by a trials factor, so that the overall FAR thresholds described above are satisfied for each class of event.
4.2 Alert contents
The alert contains information to support the search for counterparts including:
-
A candidate identifier, which can be used to examine the event properties in the Gravitational Wave Candidate Event Database.Footnote 18
-
The FAR of the candidate in Hz.
-
The localization given as a posterior probability distribution of the source’s sky position. For CBC events, we send a 3-D sky map, which also contains the direction-dependent luminosity distance. The localization is encoded as a HEALPIX projection in FITS file format.
-
For Burst candidates the central frequency in Hz, the duration in seconds and the GW fluence in erg/cm2.
-
For CBC candidates the probability \(p_{\mathrm {astro}}\), that the signal is astrophyiscal (see Sect. 3.1). This probability comes from evaluating whether the source belongs to one of five categories: BNS merger (both component masses \(< 3\,M_\odot \)), MassGap merger (\(3\,M_\odot<\) one component mass \(< 5\,M_\odot \)) NSBH merger (one component mass \(< 3\,M_\odot \) and the other \(>5\,M_\odot \)), BBH merger (both component masses \(> 5\,M_\odot \)), Terrestrial (i.e. Noise). Details about the formalism used to compute this probability are given in Kapadia et al. (2020). The method to assign probabilities of astrophysical origin to GW candidate events is based on redistributing, via mass-based template weighting, the foreground probabilities of candidate events with respect to the background model across the astrophysical categories shown in Fig. 9. The template weights are computed from injection campaigns of astrophysical sources with defined mass and spin distributions into the detector data, and recovering them via a detection pipeline. The method accuracy depends on how well the template weights are constructed. Kapadia et al. (2020) show that the constructed weights were adequate and the method works well for the GW signals observed during O1 and O2. Using template weights that are not perfectly constructed for the O3 signals would not affect distinguishing astrophysical vs terrestrial probability, but could make the method imprecise in distinguishing among low-mass systems containing one or two neutron stars, or two low mass black holes.
-
For CBC candidates the probability that one or both components has a mass consistent with a neutron star (HasNS), that is a mass \(< 3\,M_\odot \). And the probability that the system ejected a non-zero amount of neutron star matter (HasRemnant). This latter evaluates the probability that baryon mass is left outside the merger remnant using the masses and spins of the binary system inferred from the signal (Foucart 2012; Pannarale and Ohme 2014; Foucart et al. 2018).

Image adapted from the LIGO/Virgo Public Alerts User Guide (see footnote 17)
The four astrophysical categories in terms (BNS, NSBH, BBH, and MassGap) of component masses m1 and m2, which are used to define the source classification. By convention, the component masses are defined such that \( m1 \geqslant m2\), so that the primary compact object in the binary (i.e., component 1), is always more massive than the secondary compact object (i.e., component 2).
GCN Circulars and Updates may also include a concise description of any instrument or data quality issues that could affect the significance estimate, the localization, and the GW parameter inferences.
4.3 O3a gravitational-wave candidate alerts
The first half of the third observing run of Advanced LIGO and Virgo, O3a, began at 1500 UTC on April 1, 2019 and lasted 6 months. During O3a, 41 gravitational-wave candidate events were publicly released in low-latency; 8 were retracted, 3 have a larger probability to be classified as terrestrial, 3 as BNS, 2 as lying in the mass gap, 4 as NSBH systems, and 21 as BBH systems. Among the GW candidates classified as astrophysical, 19 have a FAR smaller than 1/10 years. The median sky-localization 90% credible area for BBH (the systems for which we have larger statistics) is around \(400\,{\mathrm {deg}}^2\). However, the sky localization and numbers of O3a GW candidates cannot be directly compared to the predictions of the present paper due to the more conservative SNR threshold used in our simulation to define a detection. The smaller SNR threshold for releasing alerts is expected to give larger sky localization and higher detection counts with respect to the ones quoted in Table 5. Larger sky localization in O3 is also expected due to the release of signals detected during the observations of a single interferometer (while our simulation requires a detection of SNR > 4 in at least two instruments). Two single-detector GW candidates (classified as BNS and NSBH) were released in low-latency with a sky localization covering several thousands of \({\mathrm {deg}}^2\). For 21 alerts an updated LALInference sky map was sent (within a week for 17 of them and with a larger latency for the others). The LALInference localizations (90% c.r.) resulted to be in median smaller by about 40% with respect to the initial bayestar localizations. For a few cases, while the bayestar localization was bimodal and weights the two modes equally, LALInference favors one localization over the other. These differences among bayestar and LALInference are attributable to a multiplicative factor introduced into the on-line bayestar pipeline to account for estimation errors from search pipelines (see Singer and Price 2016). Removing the multiplicative factor results in agreement between the O3a bayestar and LALInference localizations.
5 Observing scenarios
In this section we present an estimate of the expected number of BNS, NSBH and BBH detections for the three-detector HLV network in O3 and for the four-detector HLVK network in O4. We also summarize the expected localization area and comoving volume obtained with the simulation described in Sect. 3.2.1. The expectations for the number of events we will detect in each source category comes from the same simulation of populations used to evaluate the localization capability. The astrophysical parameter distribution, detector duty cycle, and detection threshold are described in Sect. 3.2.1.
In contrast to previous versions of this paper where we gave the range of estimated rates per unit time, here, we evaluate the plausible detection counts per one-calendar-year observing run. We model each source category as a Poisson process combined with the source rate densities and anticipated surveyed volume, and we marginalize over the uncertainty in the source rate estimates. This procedure allows us to incorporate the counting uncertainty from the Poisson process, but makes forming an exact 90% confidence interval impossible, and as such, these intervals overcover. All source categories assume parameterized physical property distributionsFootnote 19 for which the chosen parameters (e.g., power laws or mass limits) are consistent with current measurements and their uncertainties (Abbott et al. 2018a). We assume constant rate density in comoving volume and source-frame time. For BNS we use the source rate density 110–3840 Gpc−3 year−1 from Abbott et al. (2018c) and Abbott et al. (2018a).Footnote 20 For BBH we use the rate calculated using Model B in Abbott et al. (2018a), 25–109 Gpc−3 year−1, and for NSBH we use the rate from Abadie et al. (2010b), 0.6–1000 Gpc−3 year−1.Footnote 21 There are numerous uncertainties involved in the component mass and spin distributions for NSBH systems and this is reflected in our estimates for expected detections. The rate is obtained assuming that NSBH mergers exist, but the absence of this type of system cannot be excluded by the O1 and O2 GW observations.
As described in in Sect. 3.2.1, we assume a duty factor of 70% for each detector, uncorrelated between instruments, and we require a network SNR of at least 12 and an SNR \(>4\) in at least two instruments.Footnote 22 All SNRs are calculated assuming perfect templates. Event significance is established not solely by SNR, but by ranking statistics used by the detection pipelines which also use the goodness of fit and the rate of background in the ranking (Cannon et al. 2015; Usman et al. 2016; Nitz et al. 2017). The thresholds set on the ranking statistic propagate to the inferred search volume VT, where V is the spacetime volumes surveyed per unit detector time defined in Sect. 2, and T is the observing time incorporating the effects of the detectors duty cycles. Our estimates are realistic projections, but the search volume is sensitive to our assumptions on source population, detection criteria and network characteristics. The simulation results for the HLV network in O3 and the HLVK network in O4 are summarized in Table 5. Adding KAGRA to the network in O3 does not change the detection counts. The results are given for a population of sources with aligned and anti-aligned spins; there is no significant change of the detection counts using isotropic spin distributions. Using uniform mass distributions (instead of a Gaussian distribution for NS and a power-law distribution for BH) increases the counts in Table 5 by about 30% for BNSs and 60% NSBHs.
5.1 O3: aLIGO 110–130 Mpc, AdV 50 Mpc, KAGRA 8–25 Mpc
This year long run began in April 2019 with the three detector HLV network and with KAGRA planning to join in the latter stages. The simulation to estimate the number of expected GW detections uses the curves in Fig. 1 for the two aLIGO and the AdV detectors, corresponding to a BNS range of 130 Mpc, 110 Mpc, and 50 Mpc respectively. For KAGRA we use the 25 Mpc curve.
The BNS search volume VT is evaluated to be \(3.3\times 10^{6}\) Mpc3 year with \(1^{+12}_{-1}\) expected detections. The median 90% credible region for the localization area (volume) of BNS is \(270^{+34}_{-20}\) \({\mathrm {deg}}^2\) (\(120^{+19}_{-24}\) \(\times \,10^{3}\,{\mathrm {Mpc}}^3\)).Footnote 23 A percentage of 9–13% (2–4%) of the events are expected to have a 90% credible region smaller than \(20\,{\mathrm {deg}}^2\) (\(5\,{\mathrm {deg}}^2\)). For BBH the search volume VT is \(3.4\times 10^{8}\) Mpc3 year, and the expected detections are \(17^{+22}_{-11}\). The median 90% credible region for the localization area (volume) is \(280^{+30}_{-23}\) \({\mathrm {deg}}^2\) (\(16000^{+2200}_{-2500}\) \(\times \,10^{3}\,{\mathrm {Mpc}}^3\)). A percentage of 9–13% (2–3%) of the events are expected to have a 90% credible area smaller than \(20\,{\mathrm {deg}}^2\) (\(5\,{\mathrm {deg}}^2\)).
5.2 O4: aLIGO 160–190 Mpc, AdV 90–120 Mpc, KAGRA 25–130 Mpc
O4 is planned to have a duration of 1 year. The aLIGO detectors will be near their design sensitivity, with a BNS range of 160–190 Mpc. AdV will have completed Phase 1 of the AdV+ upgrade with an anticipated BNS range of 90–120 Mpc. As the newest member of the network, KAGRA has the largest uncertainty in projected O4 sensitivity, a BNS range of 25–130 Mpc. For estimating the number of events expected to be detected in O4 we use an intermediate sensitivity curve for KAGRA, one with a BNS range of 80 Mpc, and the target sensitivity curve (the highest O4 sensitivity) for aLIGO and for AdV.
In O4 we predict a BNS search volume VT of \(1.6\times 10^{7}\) Mpc3 year, and \(10^{+52}_{-10}\) expected detections. The median 90% credible region for the localization area (volume) of BNS is \(33^{+5}_{-5}\) \({\mathrm {deg}}^2\) (\(52^{+10}_{-9}\) \(\times \,10^{3}\,{\mathrm {Mpc}}^3\)). A percentage of 38–44% (12–16%) of the events are expected to have a 90% credible region smaller than \(20\,{\mathrm {deg}}^2\) (\(5\,{\mathrm {deg}}^2\)). For BBH the VT searched is 1.5 Gpc3 year with \(79^{+89}_{-44}\) expected detections. The median 90% credible region for the localization area (volume) of BBH is \(41^{+7}_{-6}\) \(\,{\mathrm {deg}}^2\) (\(7700^{+1500}_{-920}\) \(\times \,10^{3}\,{\mathrm {Mpc}}^3\)). A percentage of 35–39% (11–14%) of the events are expected to have a 90% credible area smaller than \(20\,{\mathrm {deg}}^2\) (\(5\,{\mathrm {deg}}^2\)).
Table 5 lists the results described above for O3 and O4, including also predictions for NSBH. Localization capabilities of unmodelled searches for BBHs and IMBHB are shown in Sect. 3.2.2, where we give also the BBH and IMBHB ranges for the unmodeled search algorithm \(\textsc {cWB}\) in Table 4.
5.3 O5: aLIGO (LIGO-India will join in 2025) 330 Mpc, AdV 150–260 Mpc, KAGRA 130+ Mpc
There is considerable uncertainty in looking this far ahead. The current plan envisions the aLIGO instruments, including an instrument in India in 2025, beginning observations after the A+ upgrade (Abbott et al. 2018d), the AdV instrument participating after the completion of the AdV+ upgrade (Phase 2), and KAGRA operating at or above its final O4 sensitivity of 130+ Mpc. In Fig. 2 we show target sensitivities for this phase of observations. In practice the detectors are likely to begin observations at a lower sensitivity and then gradually improve over the span of several years. For now we make no quantitative predictions about the expected performance of the GW network in this era.
For O3, O4 and O5, Table 2 gives the ranges for BNS, NSBH, and BBH, and for generic burst sources emitting \(10^{-2}\,M_\odot c^2\) and \(10^{-9}\,M_\odot c^2\) in GWs.
6 Conclusions
We have presented our current best estimate of the plausible observing scenarios for the network of Advanced GW detectors, including aLIGO, AdV, and KAGRA. This includes plans, already approved and in progress, to upgrade the aLIGO and AdV instruments. We outlined the observing schedule and sensitivity evolution for the next decade, showing the anticipated strain sensitivities and the corresponding range at which we can detect BNSs, BBHs, NSBHs, and unmodeled signals. We evaluated our ability to localize BNSs, BBHs, NSBHs, and IMBHBs using matched-filter and unmodelled searches. For BNSs, BBHs, and NSBHs systems we estimated the number of expected detections in a one-calendar-year observing run. We detailed our plan to automatically notify the astronomical community of event candidates, starting in O3. This information will help to optimize multi-messenger follow-up and source identification, to plan instrument operation and projects, and to evaluate joint detections in order to maximize the science return of each GW detection (e.g., Abadie et al. 2012b; Aasi et al. 2014a; Kasliwal and Nissanke 2014; Singer et al. 2014; Cannon et al. 2012; Evans et al. 2016a; Gehrels et al. 2016; Ghosh et al. 2016; Chan et al. 2017; Rana et al. 2017; Patricelli et al. 2016; Salafia et al. 2017; Patricelli et al. 2018; Coughlin et al. 2018; Vinciguerra et al. 2019).
The three-detector aLIGO and AdV network has demonstrated the ability to localize signals to sky areas of a few tens of square degrees. The addition of KAGRA, and later LIGO-India to the network will improve this situation further. While the median sky localization area is expected to be a few hundreds of square degrees for all types of binary systems in O3, it will improve to be a few tens of square degrees during O4. By 2025 a five-detector network consisting of three upgraded LIGO detectors in the United States and India, an upgraded Virgo detector, and possibly an upgraded KAGRA instrument is expected to operate at sensitivities approaching twice that of their predecessors, and a median sky localization area of a few degrees. Detection of BBHs will become routine. A few hundred BBH detections will allow us to probe the major formation channel, and distinguish between isolated binaries and systems formed in star clusters (see e.g, Zevin et al. 2017; Stevenson et al. 2017; Farr et al. 2017). BNSs are expected to be detected with a rate from a few per year, to a few per month. Associated electromagnetic counterparts will probe properties of relativistic jets and sub-relativistic dynamical ejecta, the nucleosynthesis of heavy elements, and will enable precise cosmology.
The scenarios described here are our best current projections, they will evolve as detector installation and commissioning progress. Regular updates are planned to ensure that the content remains timely and relevant.
Notes
LIGO is short for Laser Interferometer Gravitational-Wave Observatory. KAGRA is named after the Japanese word KAGURA, which means traditional sacred music and dance for the gods; the name has a secondary meaning as an abbreviation for KAmioka GRavitational-wave Antenna. Virgo is named for the Virgo constellation and is not written in capital letters.
The detection of GW150914 occurred in the engineering run ER8 immediately preceding the formal start of O1.
The significance of LVT151012, initially classified as a GW candidate, increased after reanalysis of the O1 data with improved detection pipelines. It is now considered an astrophysical GW event (Abbott et al. 2018c).
For details on different models of core-collapse supernovae, GW peak frequency and emitted energy, and the corresponding search sensitivities see e.g (Abbott et al. 2019c). Based on the majority of the theoretical expectations, it is unlikely that advanced detectors will be sufficiently sensitive to detect an extra-galactic core-collapse supernova.
GEO 600 will continue observing with frequent commissioning breaks during this period.
The User Guide is available at emfollow.docs.ligo.org/userguide/.
The initial sky maps are available from dcc.ligo.org/public/0160/P1900170/001/O1_O2_LowLatency_Skymaps.zip, and the refined sky maps from dcc.ligo.org/LIGO-P1800381/public, respectively.
A data release of example three-dimension localizations in this format, constructed using results from bayestar and LALInference for BNS signals, is available from dcc.ligo.org/P1500071/public/html.
The O3 run showed differences among the bayestar and LALInference which are quantified and justified in Sect. 4.3.
In contrast to the CBC simulation, the burst sky localization simulation uses a specific network (HL, HLV, HLVK) without including sub-networks.
Details of the GCN are available from gcn.gsfc.nasa.gov.
Documentation is available in the LIGO/Virgo Public Alerts User Guide at emfollow.docs.ligo.org/userguide/.
Details on the adopted distributions of the source properties are given in Sect. 3.2.1.
This rate combines rate intervals estimated with uniform mass and Gaussian mass distribution populations (See Sect. 3). While this does not represent a physical distribution of sources, it does incorporate a degree of uncertainty arising from our ignorance of the actual BNS distribution.
We do not limit the rate to the O1–O2 upper limit of 610 Gpc−3 year−1 obtained with point mass assumptions in order to consider a broad distribution of masses.
This is a conservative choice since we routinely detect events with lower SNR (see Abbott et al. 2018c).
The median area and volume are given as 90% Monte Carlo sampling confidence bounds on the median 90% credible regions.
References
Aasi J et al (2012) The characterization of Virgo data and its impact on gravitational-wave searches. Class Quantum Grav 29:155002. https://doi.org/10.1088/0264-9381/29/15/155002. arxiv:1203.5613
Aasi J et al (2013a) Enhancing the sensitivity of the LIGO gravitational wave detector by using squeezed states of light. Nature Photon 7:613–619. https://doi.org/10.1038/nphoton.2013.177. arxiv:1310.0383
Aasi J et al (2013b) Parameter estimation for compact binary coalescence signals with the first generation gravitational-wave detector network. Phys Rev D 88:062001. https://doi.org/10.1103/PhysRevD.88.062001. arxiv:1304.1775
Aasi J et al (2014a) First searches for optical counterparts to gravitational-wave candidate events. Astrophys J Suppl 211:7. https://doi.org/10.1088/0067-0049/211/1/7. arxiv:1310.2314
Aasi J et al (2014b) Methods and results of a search for gravitational waves associated with gamma-ray bursts using the GEO600, LIGO, and Virgo detectors. Phys Rev D 89:122004. https://doi.org/10.1103/PhysRevD.89.122004. arxiv:1405.1053
Aasi J et al (2014c) Search for gravitational radiation from intermediate mass black hole binaries in data from the second LIGO-Virgo joint science run. Phys Rev D 89:122003. https://doi.org/10.1103/PhysRevD.89.122003. arxiv:1404.2199
Aasi J et al (2014d) Search for gravitational waves associated with \(\gamma \)-ray bursts detected by the interplanetary network. Phys Rev Lett 113:011102. https://doi.org/10.1103/PhysRevLett.113.011102. arxiv:1403.6639
Aasi J et al (2015a) Advanced LIGO. Class Quantum Grav 32:074001. https://doi.org/10.1088/0264-9381/32/7/074001. arxiv:1411.4547
Aasi J et al (2015b) Characterization of the LIGO detectors during their sixth science run. Class Quantum Grav 32:115012. https://doi.org/10.1088/0264-9381/32/11/115012. arxiv:1410.7764
Aasi J et al (2016) Prospects for observing and localizing gravitational-wave transients with Advanced LIGO and Advanced Virgo. Living Rev Relativ 19:1. https://doi.org/10.1007/lrr-2016-1. arxiv:1304.0670v3
Abadie J et al (2008) Search for gravitational-wave bursts from soft gamma repeaters. Phys Rev Lett 101:211102. https://doi.org/10.1103/PhysRevLett.101.211102. arxiv:0808.2050
Abadie J et al (2010a) All-sky search for gravitational-wave bursts in the first joint LIGO-GEO-Virgo run. Phys Rev D 81:102001. https://doi.org/10.1103/PhysRevD.85.089905. arxiv:1002.1036
Abadie J et al (2010b) Predictions for the rates of compact binary coalescences observable by ground-based gravitational-wave detectors. Class Quantum Grav 27:173001. https://doi.org/10.1088/0264-9381/27/17/173001. arxiv:1003.2480
Abadie J et al (2011a) A gravitational wave observatory operating beyond the quantum shot-noise limit: squeezed light in application. Nature Phys 7:962–965. https://doi.org/10.1038/nphys2083. arxiv:1109.2295
Abadie J et al (2011b) Search for gravitational wave bursts from six magnetars. Astrophys J Lett 734:L35. https://doi.org/10.1088/2041-8205/734/2/L35. arxiv:1011.4079
Abadie J et al (2012a) All-sky search for gravitational-wave bursts in the second joint LIGO-Virgo run. Phys Rev D 85:122007. https://doi.org/10.1103/PhysRevD.85.122007. arxiv:1202.2788
Abadie J et al (2012b) First low-latency LIGO+Virgo search for binary inspirals and their electromagnetic counterparts. Astron Astrophys 541:A155. https://doi.org/10.1051/0004-6361/201218860. arxiv:1112.6005
Abadie J et al (2012c) Implementation and testing of the first prompt search for gravitational wave transients with electromagnetic counterparts. Astron Astrophys 539:A124. https://doi.org/10.1051/0004-6361/201118219. arxiv:1109.3498
Abadie J et al (2012d) Search for gravitational waves associated with gamma-ray bursts during LIGO science run 6 and Virgo science runs 2 and 3. Astrophys J 760:12. https://doi.org/10.1088/0004-637X/760/1/12. arxiv:1205.2216
Abadie J et al (2012e) Search for gravitational waves from intermediate mass binary black holes. Phys Rev D 85:102004. https://doi.org/10.1103/PhysRevD.85.102004. arxiv:1201.5999
Abbott BP et al (2016a) All-sky search for long-duration gravitational wave transients with initial LIGO. Phys Rev D 93:042005. https://doi.org/10.1103/PhysRevD.93.042005. arxiv:1511.04398
Abbott BP et al (2016b) Binary black hole mergers in the first Advanced LIGO observing run. Phys Rev X 6:041015. https://doi.org/10.1103/PhysRevX.6.041015. arxiv:1606.04856
Abbott BP et al (2016c) Characterization of transient noise in Advanced LIGO relevant to gravitational wave signal GW150914. Class Quantum Grav 33:134001. https://doi.org/10.1088/0264-9381/33/13/134001. arxiv:1602.03844
Abbott BP et al (2016d) GW150914: first results from the search for binary black hole coalescence with Advanced LIGO. Phys Rev D 93:122003. https://doi.org/10.1103/PhysRevD.93.122003. arxiv:1602.03839
Abbott BP et al (2016e) GW150914: the Advanced LIGO detectors in the era of first discoveries. Phys Rev Lett 116:131103. https://doi.org/10.1103/PhysRevLett.116.131103. arxiv:1602.03838
Abbott BP et al (2016f) GW151226: observation of gravitational waves from a 22-solar-mass binary black hole coalescence. Phys Rev Lett 116:241103. https://doi.org/10.1103/PhysRevLett.116.241103. arxiv:1606.04855
Abbott BP et al (2016g) Improved analysis of GW150914 using a fully spin-precessing waveform model. Phys Rev X 6:041014. https://doi.org/10.1103/PhysRevX.6.041014. arxiv:1606.01210
Abbott BP et al (2016h) Localization and broadband follow-up of the gravitational-wave transient GW150914. Astrophys J Lett 826:L13. https://doi.org/10.3847/2041-8205/826/1/L13. arxiv:1602.08492
Abbott BP et al (2016i) Observation of gravitational waves from a binary black hole merger. Phys Rev Lett 116:061102. https://doi.org/10.1103/PhysRevLett.116.061102. arxiv:1602.03837
Abbott BP et al (2016j) Observing gravitational-wave transient GW150914 with minimal assumptions. Phys Rev D 93:122004. https://doi.org/10.1103/PhysRevD.93.122004. arxiv:1602.03843
Abbott BP et al (2016k) Properties of the binary black hole merger GW150914. Phys Rev Lett 116:241102. https://doi.org/10.1103/PhysRevLett.116.241102. arxiv:1602.03840
Abbott BP et al (2016l) Supplement: localization and broadband follow-up of the gravitational-wave transient GW150914. Astrophys J Suppl 225:8. https://doi.org/10.3847/0067-0049/225/1/8. arxiv:1604.07864
Abbott BP et al (2016m) Supplement: the rate of binary black hole mergers inferred from Advanced LIGO observations surrounding GW150914. Astrophys J Suppl 227:14. https://doi.org/10.3847/0067-0049/227/2/14. arxiv:1606.03939
Abbott BP et al (2016n) The rate of binary black hole mergers inferred from Advanced LIGO observations surrounding GW150914. Astrophys J Lett 833:1. https://doi.org/10.3847/2041-8205/833/1/L1. arxiv:1602.03842
Abbott BP et al (2016o) Upper limits on the rates of binary neutron star and neutron-star–black-hole mergers from Advanced LIGO’s first observing run. Astrophys J Lett 832:L21. https://doi.org/10.3847/2041-8205/832/2/L21. arxiv:1607.07456
Abbott BP et al (2017a) A gravitational-wave standard siren measurement of the Hubble constant. Nature 551:85–88. https://doi.org/10.1038/nature24471. arxiv:1710.05835
Abbott BP et al (2017b) All-sky search for short gravitational-wave bursts in the first Advanced LIGO run. Phys Rev D 95:042003. https://doi.org/10.1103/PhysRevD.95.042003. arxiv:1611.02972
Abbott BP et al (2017c) Calibration of the Advanced LIGO detectors for the discovery of the binary black-hole merger GW150914. Phys Rev D 95:062003. https://doi.org/10.1103/PhysRevD.95.062003. arxiv:1602.03845
Abbott BP et al (2017d) Exploring the sensitivity of next generation gravitational wave detectors. Class Quantum Grav 34:044001. https://doi.org/10.1088/1361-6382/aa51f4. arxiv:1607.08697
Abbott BP et al (2017e) Gravitational waves and gamma-rays from a binary neutron star merger: GW170817 and GRB 170817A. Astrophys J Lett 848:L13. https://doi.org/10.3847/2041-8213/aa920c. arxiv:1710.05834
Abbott BP et al (2017f) GW170104: observation of a 50-solar-mass binary black hole coalescence at redshift 0.2. Phys Rev Lett 118:221101. https://doi.org/10.1103/PhysRevLett.118.221101. arxiv:1706.01812
Abbott BP et al (2017g) GW170608: observation of a 19 solar-mass binary black hole coalescence. Astrophys J Lett 851:35. https://doi.org/10.3847/2041-8213/aa9f0c. arxiv:1711.05578
Abbott BP et al (2017h) GW170814: a three-detector observation of gravitational waves from a binary black hole coalescence. Phys Rev Lett 119:141101. https://doi.org/10.1103/PhysRevLett.119.141101. arxiv:1709.09660
Abbott BP et al (2017i) GW170817: observation of gravitational waves from a binary neutron star inspiral. Phys Rev Lett 119:161101. https://doi.org/10.1103/PhysRevLett.119.161101. arxiv:1710.05832
Abbott BP et al (2017j) Multi-messenger observations of a binary neutron star merger. Astrophys J Lett 848:L12. https://doi.org/10.3847/2041-8213/aa91c9. arxiv:1710.05833
Abbott BP et al (2017k) Search for gravitational waves associated with gamma-ray bursts during the first Advanced LIGO observing run and implications for the origin of GRB 150906B. Astrophys J 841:89. https://doi.org/10.3847/1538-4357/aa6c47. arxiv:1611.07947
Abbott BP et al (2017l) Search for intermediate mass black hole binaries in the first observing run of Advanced LIGO. Phys Rev D 96:022001. https://doi.org/10.1103/PhysRevD.96.022001. arxiv:1704.04628
Abbott BP et al (2018a) Binary black hole population properties inferred from the first and second observing runs of Advanced LIGO and Advanced Virgo. Astrophys J arxiv:1811.12940
Abbott BP et al (2018b) Constraints on cosmic strings using data from the first Advanced LIGO observing run. Phys Rev D 97:102002. https://doi.org/10.1103/PhysRevD.97.102002. arxiv:1712.01168
Abbott BP et al (2018c) GWTC-1: a gravitational-wave transient catalog of compact binary mergers observed by LIGO and Virgo during the first and second observing runs. arXiv e-prints arxiv:1811.12907
Abbott BP et al (2018d) Instrument science white paper. Technical Report LIGO-T1800133-v3, LIGO, Pasadena, CA. https://dcc.ligo.org/LIGO-T1800133/public
Abbott BP et al (2018e) The LSC–Virgo white paper on gravitational wave searches and astrophysics (2018–2019 edition). Technical Report LIGO-T1800058-v2, LIGO, Pasadena, CA. https://dcc.ligo.org/LIGO-T1800058/public
Abbott BP et al (2018f) Prospects for observing and localizing gravitational-wave transients with Advanced LIGO, Advanced Virgo and KAGRA. Living Rev Relativ 21:3. https://doi.org/10.1007/s41114-018-0012-9. arxiv:1304.0670
Abbott BP et al (2018g) Search for subsolar-mass ultracompact binaries in Advanced LIGO’s first observing run. Phys Rev Lett 121:231103. https://doi.org/10.1103/PhysRevLett.121.231103. arxiv:1808.04771
Abbott BP et al (2019a) All-sky search for long-duration gravitational-wave transients in the second Advanced LIGO observing run. arXiv e-prints arxiv:1903.12015
Abbott BP et al (2019b) All-sky search for short gravitational-wave bursts in the second Advanced LIGO and Advanced Virgo run. arXiv e-prints arXiv:1905.03457
Abbott BP et al (2019c) An optically targeted search for gravitational waves emitted by core-collapse supernovae during the first and second observing runs of Advanced LIGO and Advanced Virgo. arXiv e-prints arxiv:1908.03584
Abbott BP et al (2019d) Low-latency gravitational wave alerts for multi-messenger astronomy during the second Advanced LIGO and Virgo observing run. arXiv e-prints arxiv:1901.03310
Abbott BP et al (2019e) Search for eccentric binary black hole mergers with Advanced LIGO and Advanced Virgo during their first and second observing runs. arXiv e-prints arXiv:1907.09384
Abbott BP et al (2019f) Search for intermediate mass black hole binaries in the first and second observing runs of the Advanced LIGO and Virgo network. arXiv e-prints arXiv:1906.08000
Abbott BP et al (2019g) Search for transient gravitational-wave signals associated with magnetar bursts during Advanced LIGO’s second observing run. Astrophys J 874:163. https://doi.org/10.3847/1538-4357/ab0e15
Acernese F et al (2015) Advanced Virgo: a second-generation interferometric gravitational wave detector. Class Quantum Grav 32:024001. https://doi.org/10.1088/0264-9381/32/2/024001. arxiv:1408.3978
Adams TS, Meacher D, Clark J, Sutton PJ, Jones G, Minot A (2013) Gravitational-wave detection using multivariate analysis. Phys Rev D 88:062006. https://doi.org/10.1103/PhysRevD.88.062006. arxiv:1305.5714
Ade PAR et al (2016) Planck 2015 results. XIII. Cosmological parameters. Astron Astrophys 594:A13. https://doi.org/10.1051/0004-6361/201525830. arxiv:1502.01589
Adrian-Martinez S et al (2016) High-energy neutrino follow-up search of gravitational wave event GW150914 with ANTARES and IceCube. Phys Rev D 93:122010. https://doi.org/10.1103/PhysRevD.93.122010. arxiv:1602.05411
Affeldt C et al (2014) Advanced techniques in GEO 600. Class Quantum Grav 31:224002. https://doi.org/10.1088/0264-9381/31/22/224002
Ajith P, Fotopoulos N, Privitera S, Neunzert A, Weinstein AJ (2014) Effectual template bank for the detection of gravitational waves from inspiralling compact binaries with generic spins. Phys Rev D 89:084041. https://doi.org/10.1103/PhysRevD.89.084041. arxiv:1210.6666
Akutsu T et al (2018) Construction of KAGRA: an underground gravitational wave observatory. Prog Theor Exp Phys 2018:013F01. https://doi.org/10.1093/ptep/ptx180. arxiv:1712.00148
Albert A et al (2017a) Search for high-energy neutrinos from binary neutron star merger GW170817 with ANTARES, IceCube, and the Pierre Auger observatory. Astrophys J Lett 850:L35. https://doi.org/10.3847/2041-8213/aa9aed. arxiv:1710.05839
Albert A et al (2017b) Search for high-energy neutrinos from gravitational wave event GW151226 and candidate LVT151012 with ANTARES and IceCube. Phys Rev D 96:022005. https://doi.org/10.1103/PhysRevD.96.022005. arxiv:1703.06298
Alexander KD, Margutti R, Blanchard PK, Fong W, Berger E, Hajela A, Eftekhari T, Chornock R, Cowperthwaite PS, Giannios D, Guidorzi C, Kathirgamaraju A, MacFadyen A, Metzger BD, Nicholl M, Sironi L, Villar VA, Williams PKG, Xie X, Zrake J (2018) A decline in the X-ray through radio emission from GW170817 continues to support an off-axis structured jet. Astrophys J Lett 863:L18. https://doi.org/10.3847/2041-8213/aad637. arxiv:1805.02870
Alexander KD et al (2017) The electromagnetic counterpart of the binary neutron star merger LIGO/Virgo GW170817. VI. Radio constraints on a relativistic jet and predictions for late-time emission from the kilonova ejecta. Astrophys J Lett 848:L21. https://doi.org/10.3847/2041-8213/aa905d. arxiv:1710.05457
Allen B (2005) \(\chi ^2\) time-frequency discriminator for gravitational wave detection. Phys Rev D 71:062001. https://doi.org/10.1103/PhysRevD.71.062001. arxiv:gr-qc/0405045
Amaro-Seoane P, Audley H, Babak S, Baker J, Barausse E, Bender P, Berti E, Binetruy P, Born M, Bortoluzzi D, Camp J, Caprini C, Cardoso V, Colpi M, Conklin J, Cornish N, Cutler C, Danzmann K, Dolesi R, Ferraioli L, Ferroni V, Fitzsimons E, Gair J, Gesa Bote L, Giardini D, Gibert F, Grimani C, Halloin H, Heinzel G, Hertog T, Hewitson M, Holley-Bockelmann K, Hollington D, Hueller M, Inchauspe H, Jetzer P, Karnesis N, Killow C, Klein A, Klipstein B, Korsakova N, Larson SL, Livas J, Lloro I, Man N, Mance D, Martino J, Mateos I, McKenzie K, McWilliams ST, Miller C, Mueller G, Nardini G, Nelemans G, Nofrarias M, Petiteau A, Pivato P, Plagnol E, Porter E, Reiche J, Robertson D, Robertson N, Rossi E, Russano G, Schutz B, Sesana A, Shoemaker D, Slutsky J, Sopuerta CF, Sumner T, Tamanini N, Thorpe I, Troebs M, Vallisneri M, Vecchio A, Vetrugno D, Vitale S, Volonteri M, Wanner G, Ward H, Wass P, Weber W, Ziemer J, Zweifel P (2017) Laser Interferometer Space Antenna. arXiv e-prints arXiv:1702.00786
Anderson S, Williams R (2017) LIGO data management plan, June 2017. Technical Report LIGO-M1000066, LIGO Scientific Collaboration and Virgo Collaboration. https://dcc.ligo.org/LIGO-M1000066/public
Arcavi I et al (2017) Optical emission from a kilonova following a gravitational-wave-detected neutron-star merger. Nature 551:64. https://doi.org/10.1038/nature24291. arxiv:1710.05843
Artale MC, Mapelli M, Giacobbo N, Sabha NB, Spera M, Santoliquido F, Bressan A (2019) Host galaxies of merging compact objects: mass, star formation rate, metallicity and colours. Mon Not R Astron Soc. https://doi.org/10.1093/mnras/stz1382. arxiv:1903.00083
Ashton G, Hübner M, Lasky PD, Talbot C, Ackley K, Biscoveanu S, Chu Q, Divakarla A, Easter PJ, Goncharov B, Hernandez Vivanco F, Harms J, Lower ME, Meadors GD, Melchor D, Payne E, Pitkin MD, Powell J, Sarin N, Smith RJE, Thrane E (2019) BILBY: a user-friendly Bayesian inference library for gravitational-wave astronomy. Astrophys J Suppl Ser 241:27. https://doi.org/10.3847/1538-4365/ab06fc. arxiv:1811.02042
Aso Y et al (2013) Interferometer design of the KAGRA gravitational wave detector. Phys Rev D 88:043007. https://doi.org/10.1103/PhysRevD.88.043007. arxiv:1306.6747
Atwood WB, Abdo AA, Ackermann M, Althouse W, Anderson B, Axelsson M, Baldini L, Ballet J, Band DL, Barbiellini G et al (2009) The Large Area Telescope on the Fermi Gamma-Ray Space Telescope mission. Astrophys J 697:1071–1102. https://doi.org/10.1088/0004-637X/697/2/1071. arxiv:0902.1089
Babak S, Balasubramanian R, Churches D, Cokelaer T, Sathyaprakash BS (2006) A template bank to search for gravitational waves from inspiralling compact binaries. I. Physical models. Class Quantum Grav 23:5477–5504. https://doi.org/10.1088/0264-9381/23/18/002. arxiv:gr-qc/0604037
Babak S et al (2013) Searching for gravitational waves from binary coalescence. Phys Rev D 87:024033. https://doi.org/10.1103/PhysRevD.87.024033. arxiv:1208.3491
Bagoly Z et al (2016) Searching for electromagnetic counterpart of LIGO gravitational waves in the Fermi GBM data with ADWO. Astron Astrophys 593:L10. https://doi.org/10.1051/0004-6361/201628569. arxiv:1603.06611
Barausse E, Yunes N, Chamberlain K (2016) Theory-agnostic constraints on black-hole dipole radiation with multiband gravitational-wave astrophysics. Phys Rev Lett 116:241104. https://doi.org/10.1103/PhysRevLett.116.241104. arxiv:1603.04075
Barbieri C, Salafia OS, Perego A, Colpi M, Ghirlanda G (2019) Light-curve models of black hole–neutron star mergers: steps towards a multi-messenger parameter estimation. Astron Astrophys 625:A152. https://doi.org/10.1051/0004-6361/201935443. arxiv:1903.04543
Barnes J, Kasen D (2013) Effect of a high opacity on the light curves of radioactively powered transients from compact object mergers. Astrophys J 775(1):18. https://doi.org/10.1088/0004-637X/775/1/18. arxiv:1303.5787
Barrett JW, Gaebel SM, Neijssel CJ, Vigna-Gómez A, Stevenson S, Berry CPL, Farr WM, Mandel I (2018) Accuracy of inference on the physics of binary evolution from gravitational-wave observations. Mon Not R Astron Soc 477:4685–4695. https://doi.org/10.1093/mnras/sty908. arxiv:1711.06287
Bartos I, Kocsis B, Haiman Z, Márka S (2017) Rapid and bright stellar-mass binary black hole mergers in active galactic nuclei. Astrophys J 835:165. https://doi.org/10.3847/1538-4357/835/2/165. arxiv:1602.03831
Bécsy B, Raffai P, Cornish NJ, Essick R, Kanner J, Katsavounidis E, Littenberg TB, Millhouse M, Vitale S (2017) Parameter estimation for gravitational-wave bursts with the BayesWave pipeline. Astrophys J 839:15. https://doi.org/10.3847/1538-4357/aa63ef. arxiv:1612.02003
Belczynski K et al (2017) The origin of the first neutron star-neutron star merger. ArXiv e-prints arxiv:1712.00632
Berger BK (2018) Identification and mitigation of Advanced LIGO noise sources. J Phys: Conf Ser 957:012004. https://doi.org/10.1088/1742-6596/957/1/012004
Berry CPL et al (2015) Parameter estimation for binary neutron-star coalescences with realistic noise during the Advanced LIGO era. Astrophys J 804:114. https://doi.org/10.1088/0004-637X/804/2/114. arxiv:1411.6934
Biscans S et al (2018) Control strategy to limit duty cycle impact of earthquakes on the LIGO gravitational-wave detectors. Class Quantum Grav 35:055004. https://doi.org/10.1088/1361-6382/aaa4aa. arxiv:1707.03466
Blackburn L, Briggs MS, Camp J, Christensen N, Connaughton V, Jenke P, Remillard RA, Veitch J (2015) High-energy electromagnetic offline follow-up of LIGO-Virgo gravitational-wave binary coalescence candidate events. Astrophys J Suppl 217:8. https://doi.org/10.1088/0067-0049/217/1/8. arxiv:1410.0929
Blanchet L (2014) Gravitational radiation from post-newtonian sources and inspiralling compact binaries. Living Rev Relativ 17:2. https://doi.org/10.12942/lrr-2014-2. arxiv:1310.1528
Breivik K et al (2016) Distinguishing between formation channels for binary black holes with LISA. Astrophys J Lett 830:L18. https://doi.org/10.3847/2041-8205/830/1/L18. arxiv:1606.09558
Brown DA, Harry I, Lundgren A, Nitz AH (2012) Detecting binary neutron star systems with spin in advanced gravitational-wave detectors. Phys Rev D 86:084017. https://doi.org/10.1103/PhysRevD.86.084017. arxiv:1207.6406
Brown DD, Miao H, Collins C, Mow-Lowry C, Töyra D, Freise A (2017) Broadband sensitivity enhancement of detuned dual-recycled Michelson interferometers with EPR entanglement. Phys Rev D 96:062003. https://doi.org/10.1103/PhysRevD.96.062003. arxiv:1704.07173
Buonanno A, Iyer B, Ochsner E, Pan Y, Sathyaprakash BS (2009) Comparison of post-Newtonian templates for compact binary inspiral signals in gravitational-wave detectors. Phys Rev D 80:084043. https://doi.org/10.1103/PhysRevD.80.084043. arxiv:0907.0700
Burns E, Goldstein A, Hui CM, Blackburn L, Briggs MS, Connaughton V, Hamburg R, Kocevski D, Veres P, Wilson-Hodge CA, Bissaldi E, Cleveland WH, Giles MM, Mailyan B, Meegan CA, Paciesas WA, Poolakkil S, Preece RD, Racusin JL, Roberts OJ, von Kienlin A (Fermi Gamma-Ray Burst Monitor), Abbott BP, Abbott R, Abbott TD, Acernese F, Ackley K, Adams C, Adams T, Addesso P et al (A LIGO Scientific Collaboration and the Virgo Collaboration) (2019) A Fermi Gamma-Ray Burst Monitor search for electromagnetic signals coincident with gravitational-wave candidates in advanced LIGO’s first observing run. Astrophys J 871:90. https://doi.org/10.3847/1538-4357/aaf726. arxiv:1810.02764
Bustillo JC, Laguna P, Shoemaker D (2017) Detectability of gravitational waves from binary black holes: impact of precession and higher modes. Phys Rev D 95:104038. https://doi.org/10.1103/PhysRevD.95.104038. arxiv:1612.02340
Canizares P, Field SE, Gair JR, Tiglio M (2013) Gravitational wave parameter estimation with compressed likelihood evaluations. Phys Rev D 87:124005. https://doi.org/10.1103/PhysRevD.87.124005. arxiv:1304.0462
Canizares P, Field SE, Gair J, Raymond V, Smith R, Tiglio M (2015) Accelerated gravitational-wave parameter estimation with reduced order modeling. Phys Rev Lett 114:071104. https://doi.org/10.1103/PhysRevLett.114.071104. arxiv:1404.6284
Cannon K, Cariou R, Chapman A, Crispin-Ortuzar M, Fotopoulos N et al (2012) Toward early-warning detection of gravitational waves from compact binary coalescence. Astrophys J 748:136. https://doi.org/10.1088/0004-637X/748/2/136. arxiv:1107.2665
Cannon K, Hanna C, Peoples J (2015) Likelihood-ratio ranking statistic for compact binary coalescence candidates with rate estimation. ArXiv e-prints arxiv:1504.04632
Capano C, Harry I, Privitera S, Buonanno A (2016) Implementing a search for gravitational waves from binary black holes with nonprecessing spin. Phys Rev D 93:124007. https://doi.org/10.1103/PhysRevD.93.124007. arxiv:1602.03509
Capano C, Dent T, Hanna C, Hendry M, Hu YM, Messenger C, Veitch J (2017) Systematic errors in estimation of gravitational-wave candidate significance. Phys Rev D 96:082002. https://doi.org/10.1103/PhysRevD.96.082002. arxiv:1708.06710
Centrella J et al (2010) Black-hole binaries, gravitational waves, and numerical relativity. Rev Mod Phys 82:3069. https://doi.org/10.1103/RevModPhys.82.3069. arxiv:1010.5260
Chan ML, Hu YM, Messenger C, Hendry M, Heng IS (2017) Maximising the detection probability of kilonovae associated with gravitational wave observations. Astrophys J 834:84. https://doi.org/10.3847/1538-4357/834/1/84. arxiv:1506.04035
Chassande-Mottin E, Miele M, Mohapatra S, Cadonati L (2010) Detection of gravitational-wave bursts with chirplet-like template families. Class Quantum Grav 27:194017. https://doi.org/10.1088/0264-9381/27/19/194017. arxiv:1005.2876
Chatterji S, Lazzarini A, Stein L, Sutton P, Searle A, Tinto M (2006) Coherent network analysis technique for discriminating gravitational-wave bursts from instrumental noise. Phys Rev D 74:082005. https://doi.org/10.1103/PhysRevD.74.082005. arxiv:gr-qc/0605002
Chen HY, Holz DE, Miller J, Evans M, Vitale S, Creighton J (2017) Distance measures in gravitational-wave astrophysics and cosmology. ArXiv e-prints arxiv:1709.08079
Chen HY, Fishbach M, Holz DE (2018) A two per cent Hubble constant measurement from standard sirens within five years. Nature 562:545–547. https://doi.org/10.1038/s41586-018-0606-0. arxiv:1712.06531
Chornock R et al (2017) The electromagnetic counterpart of the binary neutron star merger LIGO/Virgo GW170817. IV. Detection of near-infrared signatures of r-process nucleosynthesis with gemini-south. Astrophys J Lett 848:L19. https://doi.org/10.3847/2041-8213/aa905c. arxiv:1710.05454
Chruslinska M, Nelemans G, Belczynski K (2019) The influence of the distribution of cosmic star formation at different metallicities on the properties of merging double compact objects. Mon Not R Astron Soc 482:5012–5017. https://doi.org/10.1093/mnras/sty3087. arxiv:1811.03565
Ciolfi R, Siegel DM (2015) Short gamma-ray bursts in the “time-reversal” scenario. Astrophys J Lett 798:L36. https://doi.org/10.1088/2041-8205/798/2/L36. arxiv:1411.2015
Cokelaer T (2007) Gravitational waves from inspiralling compact binaries: hexagonal template placement and its efficiency in detecting physical signals. Phys Rev D 76:102004. https://doi.org/10.1103/PhysRevD.76.102004. arxiv:0706.4437
Connaughton V et al (2016) Fermi GBM observations of LIGO gravitational wave event GW150914. Astrophys J Lett 826:L6. https://doi.org/10.3847/2041-8205/826/1/L6. arxiv:1602.03920
Connaughton V et al (2018) On the interpretation of the Fermi GBM transient observed in coincidence with LIGO gravitational wave event GW150914. Astrophys J Lett 853:L9. https://doi.org/10.3847/2041-8213/aaa4f2. arxiv:1801.02305
Cornish NJ, Littenberg TB (2015) BayesWave: Bayesian inference for gravitational wave bursts and instrument glitches. Class Quantum Grav 32:135012. https://doi.org/10.1088/0264-9381/32/13/135012. arxiv:1410.3835
Coughlin M et al (2017) Limiting the effects of earthquakes on gravitational-wave interferometers. Class Quantum Grav 34:044004. https://doi.org/10.1088/1361-6382/aa5a60. arxiv:1611.09812
Coughlin MW et al (2018) Optimizing searches for electromagnetic counterparts of gravitational wave triggers. ArXiv e-prints arxiv:1803.02255
Coulter DA et al (2017) Swope Supernova Survey 2017a (SSS17a), the optical counterpart to a gravitational wave source. Science 358(6370):1556–1558. https://doi.org/10.1126/science.aap9811. arxiv:1710.05452
Covas PB et al (2018) Identification and mitigation of narrow spectral artifacts that degrade searches for persistent gravitational waves in the first two observing runs of Advanced LIGO. Phys Rev D 97:082002. https://doi.org/10.1103/PhysRevD.97.082002. arxiv:1801.07204
Cowperthwaite PS et al (2016) A DECam search for an optical counterpart to the LIGO gravitational wave event GW151226. Astrophys J Lett 826:L29. https://doi.org/10.3847/2041-8205/826/2/L29. arxiv:1606.04538
Cutler C, Flanagan EE (1994) Gravitational waves from merging compact binaries: how accurately can one extract the binary’s parameters from the inspiral wave form? Phys Rev D 49:2658–2697. https://doi.org/10.1103/PhysRevD.49.2658. arxiv:gr-qc/9402014
Dal Canton T, Harry IW (2017) Designing a template bank to observe compact binary coalescences in Advanced LIGO’s second observing run. ArXiv e-prints arxiv:1705.01845
Dal Canton T, Bhagwat S, Dhurandhar SV, Lundgren A (2014a) Effect of sine-Gaussian glitches on searches for binary coalescence. Class Quantum Grav 31:015016. https://doi.org/10.1088/0264-9381/31/1/015016. arxiv:1304.0008
Dal Canton T, Lundgren AP, Nielsen AB (2015) Impact of precession on aligned-spin searches for neutron-star–black-hole binaries. Phys Rev D 91:062010. https://doi.org/10.1103/PhysRevD.91.062010. arxiv:1411.6815
Dal Canton T et al (2014b) Implementing a search for aligned-spin neutron star–black hole systems with advanced ground based gravitational wave detectors. Phys Rev D 90:082004. https://doi.org/10.1103/PhysRevD.90.082004. arxiv:1405.6731
Dalal N, Holz DE, Hughes SA, Jain B (2006) Short GRB and binary black hole standard sirens as a probe of dark energy. Phys Rev D 74(6):063006. https://doi.org/10.1103/PhysRevD.74.063006. arxiv:astro-ph/0601275
D’Avanzo P, Campana S, Salafia OS, Ghirlanda G, Ghisellini G, Melandri A, Bernardini MG, Branchesi M, Chassande-Mottin E, Covino S, D’Elia V, Nava L, Salvaterra R, Tagliaferri G, Vergani SD (2018) The evolution of the X-ray afterglow emission of GW 170817/ GRB 170817A in XMM-Newton observations. Astron Astrophys 613:L1. https://doi.org/10.1051/0004-6361/201832664. arxiv:1801.06164
Daw EJ, Giaime JA, Lormand D, Lubinski M, Zweizig J (2004) Long term study of the seismic environment at LIGO. Class Quantum Grav 21:2255–2273. https://doi.org/10.1088/0264-9381/21/9/003. arxiv:gr-qc/0403046
de Mink SE, Belczynski K (2015) Merger rates of double neutron stars and stellar origin black holes: the impact of initial conditions on binary evolution predictions. Astrophys J 814:58. https://doi.org/10.1088/0004-637X/814/1/58. arxiv:1506.03573
Del Pozzo W (2012) Inference of cosmological parameters from gravitational waves: applications to second generation interferometers. Phys Rev D 86:043011. https://doi.org/10.1103/PhysRevD.86.043011. arxiv:1108.1317
Del Pozzo W, Berry C, Ghosh A, Haines T, Singer L, Vecchio A (2018) Dirichlet Process Gaussian-mixture model: An application to localizing coalescing binary neutron stars with gravitational-wave observations. https://doi.org/10.1093/mnras/sty1485. ArXiv e-prints arxiv:1801.08009
Dimmelmeier H, Ott C, Marek A, Janka HT (2008) The gravitational wave burst signal from core collapse of rotating stars. Phys Rev D 78:064056. https://doi.org/10.1103/PhysRevD.78.064056. arxiv:0806.4953
Dobie D, Kaplan DL, Murphy T, Lenc E, Mooley KP, Lynch C, Corsi A, Frail D, Kasliwal M, Hallinan G (2018) A turnover in the radio light curve of GW170817. Astrophys J Lett 858:L15. https://doi.org/10.3847/2041-8213/aac105
Dominik M, Berti E, O’Shaughnessy R, Mandel I, Belczynski K, Fryer C, Holz DE, Bulik T, Pannarale F (2015) Double compact objects III: gravitational wave detection rates. Astrophys J 806:263. https://doi.org/10.1088/0004-637X/806/2/263. arxiv:1405.7016
Dooley KL et al (2016) GEO 600 and the GEO-HF upgrade program: successes and challenges. Class Quantum Grav 33:075009. https://doi.org/10.1088/0264-9381/33/7/075009. arxiv:1510.00317
Effler A, Schofield RMS, Frolov VV, González G, Kawabe K, Smith JR, Birch J, McCarthy R (2015) Environmental influences on the LIGO gravitational wave detectors during the 6th science run. Class Quantum Grav 32:035017. https://doi.org/10.1088/0264-9381/32/3/035017. arxiv:1409.5160
Eichler D, Livio M, Piran T, Schramm DN (1989) Nucleosynthesis, neutrino bursts and \(\gamma \)-rays from coalescing neutron stars. Nature 340(6229):126–128. https://doi.org/10.1038/340126a0
Eldridge JJ, Stanway ER, Xiao L, McClelland LAS, Taylor G, Ng M, Greis SML, Bray JC (2017) Binary population and spectral synthesis version 2.1: construction, observational verification, and new results. Publ Astron Soc Austral 34:e058. https://doi.org/10.1017/pasa.2017.51. arxiv:1710.02154
Eldridge JJ, Stanway ER, Tang PN (2019) A consistent estimate for gravitational wave and electromagnetic transient rates. Mon Not R Astron Soc 482:870–880. https://doi.org/10.1093/mnras/sty2714. arxiv:1807.07659
Essick R, Vitale S, Katsavounidis E, Vedovato G, Klimenko S (2015) Localization of short duration gravitational-wave transients with the early Advanced LIGO and Virgo detectors. Astrophys J 800:81. https://doi.org/10.1088/0004-637X/800/2/81. arxiv:1409.2435
Evans P et al (2012) Swift follow-up observations of candidate gravitational-wave transient events. Astrophys J Suppl 203:28. https://doi.org/10.1088/0067-0049/203/2/28. arxiv:1205.1124
Evans PA, Osborne JP, Kennea JA, Campana S, O’Brien PT, Tanvir NR, Racusin JL, Burrows DN, Cenko SB, Gehrels N (2016a) Optimisation of the Swift X-ray follow-up of Advanced LIGO and Virgo gravitational wave triggers in 2015–16. Mon Not R Astron Soc 455:1522–1537. https://doi.org/10.1093/mnras/stv2213. arxiv:1506.01624
Evans PA, Cenko SB, Kennea JA, Emery SWK, Kuin NPM, Korobkin O, Wollaeger RT, Fryer CL, Madsen KK, Harrison FA, Xu Y, Nakar E, Hotokezaka K, Lien A, Campana S, Oates SR, Troja E, Breeveld AA, Marshall FE, Barthelmy SD, Beardmore AP, Burrows DN, Cusumano G, D’Aì A, D’Avanzo P, D’Elia V, de Pasquale M, Even WP, Fontes CJ, Forster K, Garcia J, Giommi P, Grefenstette B, Gronwall C, Hartmann DH, Heida M, Hungerford AL, Kasliwal MM, Krimm HA, Levan AJ, Malesani D, Melandri A, Miyasaka H, Nousek JA, O’Brien PT, Osborne JP, Pagani C, Page KL, Palmer DM, Perri M, Pike S, Racusin JL, Rosswog S, Siegel MH, Sakamoto T, Sbarufatti B, Tagliaferri G, Tanvir NR, Tohuvavohu A (2017) Swift and NuSTAR observations of GW170817: detection of a blue kilonova. Science 358(6370):1565–1570. https://doi.org/10.1126/science.aap9580. arxiv:1710.05437
Evans PA et al (2016b) Swift follow-up of gravitational wave triggers: results from the first aLIGO run and optimisation for the future. Mon Not R Astron Soc 462:1591–1602. https://doi.org/10.1093/mnras/stw1746. arxiv:1606.05001
Fairhurst S (2009) Triangulation of gravitational wave sources with a network of detectors. New J Phys 11:123006. https://doi.org/10.1088/1367-2630/11/12/123006 [Erratum New J Phys 13:069602 (2011)] arxiv:0908.2356
Fairhurst S (2011) Source localization with an advanced gravitational wave detector network. Class Quantum Grav 28:105021. https://doi.org/10.1088/0264-9381/28/10/105021. arxiv:1010.6192
Fairhurst S (2017) Localization of transient gravitational wave sources: beyond triangulation. ArXiv e-prints arxiv:1712.04724
Fan X, Messenger C, Heng IS (2014) A Bayesian approach to multi-messenger astronomy: identification of gravitational-wave host galaxies. Astrophys J 795:43. https://doi.org/10.1088/0004-637X/795/1/43. arxiv:1406.1544
Farr B et al (2016) Parameter estimation on gravitational waves from neutron-star binaries with spinning components. Astrophys J 825:116. https://doi.org/10.3847/0004-637X/825/2/116. arxiv:1508.05336
Farr WM, Farr B, Littenberg T (2015) Modelling calibration errors in CBC waveforms. Technical Report LIGO-T1400682, LIGO Scientific Collaboration and Virgo Collaboration https://dcc.ligo.org/LIGO-T1400682/public
Farr WM, Stevenson S, Miller MC, Mandel I, Farr B, Vecchio A (2017) Distinguishing spin-aligned and isotropic black hole populations with gravitational waves. Nature 548:426–429. https://doi.org/10.1038/nature23453. arxiv:1706.01385
Fishbach M, Gray R, Magaña Hernandez I, Qi H, Sur A, Acernese F, Aiello L, Allocca A, Aloy MA, Amato A et al (2019) A standard siren measurement of the Hubble constant from GW170817 without the electromagnetic counterpart. Astrophys J Lett 871:L13. https://doi.org/10.3847/2041-8213/aaf96e. arxiv:1807.05667
Fong W, Blanchard PK, Alexander KD, Strader J, Margutti R, Hajela A, Villar VA, Wu Y, Ye CS, Berger E, Chornock R, Coppejans D, Cowperthwaite PS, Eftekhari T, Giannios D, Guidorzi C, Kathirgamaraju A, Laskar T, Macfadyen A, Metzger BD, Nicholl M, Paterson K, Terreran G, Sand DJ, Sironi L, Williams PKG, Xie X, Zrake J (2019) The optical afterglow of GW170817: an off-axis structured jet and deep constraints on a globular cluster origin. Astrophys J Lett 883(1):L1. https://doi.org/10.3847/2041-8213/ab3d9e. arxiv:1908.08046
Foucart F (2012) Black-hole–neutron-star mergers: disk mass predictions. Phys Rev D 86:124007. https://doi.org/10.1103/PhysRevD.86.124007. arxiv:1207.6304
Foucart F, Hinderer T, Nissanke S (2018) Remnant baryon mass in neutron star–black hole mergers: predictions for binary neutron star mimickers and rapidly spinning black holes. Phys Rev D 98:081501. https://doi.org/10.1103/PhysRevD.98.081501. arxiv:1807.00011
Gehrels N, Chincarini G, Giommi P, Mason KO, Nousek JA, Wells AA, White NE, Barthelmy SD, Burrows DN, Cominsky LR, Hurley KC, Marshall FE, Mészáros P, Roming PWA, Angelini L, Barbier LM, Belloni T, Campana S, Caraveo PA, Chester MM, Citterio O, Cline TL, Cropper MS, Cummings JR, Dean AJ, Feigelson ED, Fenimore EE, Frail DA, Fruchter AS, Garmire GP, Gendreau K, Ghisellini G, Greiner J, Hill JE, Hunsberger SD, Krimm HA, Kulkarni SR, Kumar P, Lebrun F, Lloyd-Ronning NM, Markwardt CB, Mattson BJ, Mushotzky RF, Norris JP, Osborne J, Paczynski B, Palmer DM, Park HS, Parsons AM, Paul J, Rees MJ, Reynolds CS, Rhoads JE, Sasseen TP, Schaefer BE, Short AT, Smale AP, Smith IA, Stella L, Tagliaferri G, Takahashi T, Tashiro M, Townsley LK, Tueller J, Turner MJL, Vietri M, Voges W, Ward MJ, Willingale R, Zerbi FM, Zhang WW (2004) The swift gamma-ray burst mission. Astrophys J 611:1005–1020. https://doi.org/10.1086/422091
Gehrels N, Cannizzo JK, Kanner J, Kasliwal MM, Nissanke S, Singer LP (2016) Galaxy strategy for LIGO-Virgo gravitational wave counterpart searches. Astrophys J 820:136. https://doi.org/10.3847/0004-637X/820/2/136. arxiv:1508.03608
Ghirlanda G, Salafia OS, Pescalli A, Ghisellini G, Salvaterra R, Chassande-Mottin E, Colpi M, Nappo F, D’Avanzo P, Melandri A, Bernardini MG, Branchesi M, Campana S, Ciolfi R, Covino S, Götz D, Vergani SD, Zennaro M, Tagliaferri G (2016) Short gamma-ray bursts at the dawn of the gravitational wave era. Astron Astrophys 594:A84. https://doi.org/10.1051/0004-6361/201628993. arxiv:1607.07875
Ghirlanda G, Salafia OS, Paragi Z, Giroletti M, Yang J, Marcote B, Blanchard J, Agudo I, An T, Bernardini MG, Beswick R, Branchesi M, Campana S, Casadio C, Chassande-Mottin E, Colpi M, Covino S, D’Avanzo P, D’Elia V, Frey S, Gawronski M, Ghisellini G, Gurvits LI, Jonker PG, van Langevelde HJ, Melandri A, Moldon J, Nava L, Perego A, Perez-Torres MA, Reynolds C, Salvaterra R, Tagliaferri G, Venturi T, Vergani SD, Zhang M (2019) Compact radio emission indicates a structured jet was produced by a binary neutron star merger. Science 363(6430):968–971. https://doi.org/10.1126/science.aau8815. ArXiv e-prints arxiv:1808.00469
Ghosh S, Bloemen S, Nelemans G, Groot PJ, Price LR (2016) Tiling strategies for optical follow-up of gravitational-wave triggers by telescopes with a wide field of view. Astron Astrophys 592:A82. https://doi.org/10.1051/0004-6361/201527712. arxiv:1511.02673
Giacobbo N, Mapelli M (2018) The progenitors of compact-object binaries: impact of metallicity, common envelope and natal kicks. Mon Not R Astron Soc 480:2011–2030. https://doi.org/10.1093/mnras/sty1999. arxiv:1806.00001
Goldstein A et al (2017a) An ordinary short gamma-ray burst with extraordinary implications: fermi-GBM detection of GRB 170817A. Astrophys J Lett 848:L14. https://doi.org/10.3847/2041-8213/aa8f41. arxiv:1710.05446
Goldstein A et al (2017b) Fermi observations of the LIGO event GW170104. Astrophys J Lett 846:L5. https://doi.org/10.3847/2041-8213/aa8319. arxiv:1706.00199
Goodman J (1986) Are gamma-ray bursts optically thick? Astrophys J Lett 308:L47. https://doi.org/10.1086/184741
Grossman D, Korobkin O, Rosswog S, Piran T (2014) The long-term evolution of neutron star merger remnants—II. Radioactively powered transients. Mon Not R Astron Soc 439(1):757–770. https://doi.org/10.1093/mnras/stt2503. arxiv:1307.2943
Grote H et al (2013) First long-term application of squeezed states of light in a gravitational-wave observatory. Phys Rev Lett 110:181101. https://doi.org/10.1103/PhysRevLett.110.181101. arxiv:1302.2188
Grover K, Fairhurst S, Farr BF, Mandel I, Rodriguez C, Sidery T, Vecchio A (2014) Comparison of gravitational wave detector network sky localization approximations. Phys Rev D 89:042004. https://doi.org/10.1103/PhysRevD.89.042004. arxiv:1310.7454
Haggard D, Nynka M, Ruan JJ, Kalogera V, Bradley Cenko S, Evans P, Kennea JA (2017) A deep chandra X-ray study of neutron star coalescence GW170817. Astrophys J Lett 848:L25. https://doi.org/10.3847/2041-8213/aa8ede. arxiv:1710.05852
Hajela A, Margutti R, Alexander KD, Kathirgamaraju A, Baldeschi A, Guidorzi C, Giannios D, Fong W, Wu Y, MacFadyen A, Paggi A, Berger E, Blanchard PK, Chornock R, Coppejans DL, Cowperthwaite PS, Eftekhari T, Gomez S, Hosseinzadeh G, Laskar T, Metzger BD, Nicholl M, Paterson K, Radice D, Sironi L, Terreran G, Villar VA, Williams PKG, Xie X, Zrake J (2019) Two years of nonthermal emission from the binary neutron star merger GW170817: rapid fading of the jet afterglow and first constraints on the kilonova fastest ejecta. Astrophys J Lett 886(1):L17. https://doi.org/10.3847/2041-8213/ab5226. arxiv:1909.06393
Hallinan G et al (2017) A radio counterpart to a neutron star merger. Science 358(6370):1579–1583. https://doi.org/10.1126/science.aap9855. arxiv:1710.05435
Hanna C, Mandel I, Vousden W (2014) Utility of galaxy catalogs for following up gravitational waves from binary neutron star mergers with wide-field telescopes. Astrophys J 784:8. https://doi.org/10.1088/0004-637X/784/1/8. arxiv:1312.2077
Harry I, Privitera S, Bohé A, Buonanno A (2016) Searching for gravitational waves from compact binaries with precessing spins. Phys Rev D 94:024012. https://doi.org/10.1103/PhysRevD.94.024012. arxiv:1603.02444
Harry IW, Allen B, Sathyaprakash BS (2009) Stochastic template placement algorithm for gravitational wave data analysis. Phys Rev D 80:104014. https://doi.org/10.1103/PhysRevD.80.104014. arxiv:0908.2090
Harry IW et al (2014) Investigating the effect of precession on searches for neutron-star–black-hole binaries with Advanced LIGO. Phys Rev D 89:024010. https://doi.org/10.1103/PhysRevD.89.024010. arxiv:1307.3562
Holz DE, Hughes SA (2005) Using gravitational-wave standard sirens. Astrophys J 629:15–22. https://doi.org/10.1086/431341. arxiv:astro-ph/0504616
Hurley K et al (2016) The interplanetary network response to LIGO GW150914. Astrophys J Lett 829:L12. https://doi.org/10.3847/2041-8205/829/1/L12
Iyer B et al (2011) LIGO-India. Technical Report M1100296-v2, IndIGO, India https://dcc.ligo.org/LIGO-M1100296/public
Janiuk A, Bejger M, Charzyński S, Sukova P (2017) On the possible gamma-ray burst-gravitational wave association in GW150914. New Astron 51:7–14. https://doi.org/10.1016/j.newast.2016.08.002. arxiv:1604.07132
Jaranowski P, Królak A (2012) Gravitational-wave data analysis. Formalism and sample applications: the Gaussian case. Living Rev Relativ 15:4. https://doi.org/10.12942/lrr-2012-4. arxiv:0711.1115
Kanner JB et al (2016) Leveraging waveform complexity for confident detection of gravitational waves. Phys Rev D 93:022002. https://doi.org/10.1103/PhysRevD.93.022002. arxiv:1509.06423
Kapadia SJ, Caudill S, Creighton JDE, Farr WM, Mendell G, Weinstein A, Cannon K, Fong H, Godwin P, Lo RKL, Magee R, Meacher D, Messick C, Mohite SR, Mukherjee D, Sachdev S (2020) A self-consistent method to estimate the rate of compact binary coalescences with a Poisson mixture model. Class. Quantum Grav. 37:045007. https://doi.org/10.1088/1361-6382/ab5f2d. arxiv:1903.06881
Kasen D, Badnell NR, Barnes J (2013) Opacities and spectra of the r-process ejecta from neutron star mergers. Astrophys J 774(1):25. https://doi.org/10.1088/0004-637X/774/1/25. arxiv:1303.5788
Kasliwal MM, Nissanke S (2014) On discovering electromagnetic emission from neutron star mergers: the early years of two gravitational wave detectors. Astrophys J Lett 789:L5. https://doi.org/10.1088/2041-8205/789/1/L5. arxiv:1309.1554
Kasliwal MM et al (2017) Illuminating gravitational waves: a concordant picture of photons from a neutron star merger. Science 358:1559. https://doi.org/10.1126/science.aap9455. arxiv:1710.05436
Khan S et al (2016) Frequency-domain gravitational waves from non-precessing black-hole binaries. II. A phenomenological model for the advanced detector era. Phys Rev D 93:044007. https://doi.org/10.1103/PhysRevD.93.044007. arxiv:1508.07253
Kim C, Perera BBP, McLaughlin MA (2013) Implications of PSR J0737–3039B for the galactic NS-NS binary merger rate. Mon Not R Astron Soc 448:928–938. https://doi.org/10.1093/mnras/stu2729. arxiv:1308.4676
Klencki J, Moe M, Gladysz W, Chruslinska M, Holz DE, Belczynski K (2018) Impact of inter-correlated initial binary parameters on double black hole and neutron star mergers. Astron Astrophys 619:A77. https://doi.org/10.1051/0004-6361/201833025. arxiv:1808.07889
Klimenko S, Mohanty S, Rakhmanov M, Mitselmakher G (2005) Constraint likelihood analysis for a network of gravitational wave detectors. Phys Rev D 72:122002. https://doi.org/10.1103/PhysRevD.72.122002. arxiv:gr-qc/0508068
Klimenko S, Yakushin I, Mercer A, Mitselmakher G (2008) Coherent method for detection of gravitational wave bursts. Class Quantum Grav 25:114029. https://doi.org/10.1088/0264-9381/25/11/114029. arxiv:0802.3232
Klimenko S, Vedovato G, Drago M, Mazzolo G, Mitselmakher G, Pankow C, Prodi G, Re V, Salemi F, Yakushin I (2011) Localization of gravitational wave sources with networks of advanced detectors. Phys Rev D 83:102001. https://doi.org/10.1103/PhysRevD.83.102001. arxiv:1101.5408
Klimenko S et al (2016) Method for detection and reconstruction of gravitational wave transients with networks of advanced detectors. Phys Rev D 93:042004. https://doi.org/10.1103/PhysRevD.93.042004. arxiv:1511.05999
Kruckow MU, Tauris TM, Langer N, Kramer M, Izzard RG (2018) Progenitors of gravitational wave mergers: Binary evolution with the stellar grid based code ComBinE. Mon Not R Astron Soc 481(2):1908–1949. https://doi.org/10.1093/mnras/sty2190. arxiv:1801.05433
Kulkarni SR (2005) Modeling supernova-like explosions associated with gamma-ray bursts with short durations. arXiv e-prints astro-ph/0510256
Lasky PD (2015) Gravitational waves from neutron stars: a review. Publ Astron Soc Australia 32:e034. https://doi.org/10.1017/pasa.2015.35. arxiv:1508.06643
Li LX, Paczynski B (1998) Transient events from neutron star mergers. Astrophys J 507:L59. https://doi.org/10.1086/311680. arxiv:astro-ph/9807272
LIGO Scientific Collaboration, Virgo Collaboration (2015) LIGO/Virgo G211117: identification of a GW CBC candidate. GCN Circular 18728. https://gcn.gsfc.nasa.gov/gcn3/18728.gcn3
Lindblom L, Owen BJ, Brown DA (2008) Model waveform accuracy standards for gravitational wave data analysis. Phys Rev D 78:124020. https://doi.org/10.1103/PhysRevD.78.124020. arxiv:0809.3844
Lipunov VM et al (2017) MASTER optical detection of the first LIGO/Virgo neutron star binary merger GW170817. Astrophys J Lett 850:L1. https://doi.org/10.3847/2041-8213/aa92c0. arxiv:1710.05461
Littenberg TB, Cornish NJ (2015) Bayesian inference for spectral estimation of gravitational wave detector noise. Phys Rev D 91:084034. https://doi.org/10.1103/PhysRevD.91.084034. arxiv:1410.3852
Lück H et al (2010) The upgrade of GEO600. J Phys: Conf Ser 228:012012. https://doi.org/10.1088/1742-6596/228/1/012012. arxiv:1004.0339
Lyman JD et al (2018) The optical afterglow of the short gamma-ray burst associated with GW170817. ArXiv e-prints arxiv:1801.02669
Mandel I, O’Shaughnessy R (2010) Compact binary coalescences in the band of ground-based gravitational-wave detectors. Class Quantum Grav 27:114007. https://doi.org/10.1088/0264-9381/27/11/114007. arxiv:0912.1074
Mapelli M, Giacobbo N (2018) The cosmic merger rate of neutron stars and black holes. Mon Not R Astron Soc 479:4391–4398. https://doi.org/10.1093/mnras/sty1613. arxiv:1806.04866
Margutti R et al (2017) The electromagnetic counterpart of the binary neutron star merger LIGO/Virgo GW170817. V. Rising X-ray emission from an off-axis jet. Astrophys J Lett 848:L20. https://doi.org/10.3847/2041-8213/aa9057. arxiv:1710.05431
Margutti R et al (2018) The binary neutron star event LIGO/Virgo GW170817 a hundred days after merger: synchrotron emission across the electromagnetic spectrum. Astrophys J Lett 856:L18. https://doi.org/10.3847/2041-8213/aab2ad. arxiv:1801.03531
Martynov DV et al (2016) Sensitivity of the Advanced LIGO detectors at the beginning of gravitational wave astronomy. Phys Rev D 93:112004. https://doi.org/10.1103/PhysRevD.93.112004. arxiv:1604.00439
McCully C et al (2017) The rapid reddening and featureless optical spectra of the optical counterpart of GW170817, AT 2017gfo, during the first four days. Astrophys J Lett 848:L32. https://doi.org/10.3847/2041-8213/aa9111. arxiv:1710.05853
Meegan C, Lichti G, Bhat PN, Bissaldi E, Briggs MS, Connaughton V, Diehl R, Fishman G, Greiner J, Hoover AS, van der Horst AJ, von Kienlin A, Kippen RM, Kouveliotou C, McBreen S, Paciesas WS, Preece R, Steinle H, Wallace MS, Wilson RB, Wilson-Hodge C (2009) The Fermi Gamma-Ray Burst Monitor. Astrophys J 702:791–804. https://doi.org/10.1088/0004-637X/702/1/791. arxiv:0908.0450
Messick C et al (2017) Analysis framework for the prompt discovery of compact binary mergers in gravitational-wave data. Phys Rev D 95:042001. https://doi.org/10.1103/PhysRevD.95.042001. arxiv:1604.04324
Metzger BD (2020) (2020) Kilonovae. Living Rev Relativ 23:1. https://doi.org/10.1007/s41114-019-0024-0. arxiv:1910.01617
Metzger BD, Berger E (2012) What is the most promising electromagnetic counterpart of a neutron star binary merger? Astrophys J 746:48. https://doi.org/10.1088/0004-637X/746/1/48. arxiv:1108.6056
Metzger BD, Martínez-Pinedo G, Darbha S, Quataert E, Arcones A, Kasen D, Thomas R, Nugent P, Panov IV, Zinner NT (2010) Electromagnetic counterparts of compact object mergers powered by the radioactive decay of r-process nuclei. Mon Not R Astron Soc 406(4):2650–2662. https://doi.org/10.1111/j.1365-2966.2010.16864.x. arxiv:1001.5029
Mooley KP, Deller AT, Gottlieb O, Nakar E, Hallinan G, Bourke S, Frail DA, Horesh A, Corsi A, Hotokezaka K (2018) Superluminal motion of a relativistic jet in the neutron-star merger GW170817. Nature 561:355–359. https://doi.org/10.1038/s41586-018-0486-3. arxiv:1806.09693
Mooley KP et al (2018) A mildly relativistic wide-angle outflow in the neutron star merger GW170817. Nature 554:207. https://doi.org/10.1038/nature25452. arxiv:1711.11573
Nicholl M et al (2017) The electromagnetic counterpart of the binary neutron star merger LIGO/Virgo GW170817. III. Optical and UV spectra of a blue kilonova from fast polar ejecta. Astrophys J Lett 848:L18. https://doi.org/10.3847/2041-8213/aa9029. arxiv:1710.05456
Nishizawa A, Berti E, Klein A, Sesana A (2016a) eLISA eccentricity measurements as tracers of binary black hole formation. Phys Rev D 94:064020. https://doi.org/10.1103/PhysRevD.94.064020. arxiv:1605.01341
Nishizawa A, Sesana A, Berti E, Klein A (2016b) Constraining stellar binary black hole formation scenarios with eLISA eccentricity measurements. Mon Not R Astron Soc 465:4375. https://doi.org/10.1093/mnras/stw2993. arxiv:1606.09295
Nissanke S, Holz DE, Hughes SA, Dalal N, Sievers JL (2010) Exploring short gamma-ray bursts as gravitational-wave standard sirens. Astrophys J 725:496–514. https://doi.org/10.1088/0004-637X/725/1/496. arxiv:0904.1017
Nissanke S, Sievers J, Dalal N, Holz D (2011) Localizing compact binary inspirals on the sky using ground-based gravitational wave interferometers. Astrophys J 739:99. https://doi.org/10.1088/0004-637X/739/2/99. arxiv:1105.3184
Nissanke S, Kasliwal M, Georgieva A (2013) Identifying elusive electromagnetic counterparts to gravitational wave mergers: an end-to-end simulation. Astrophys J 767:124. https://doi.org/10.1088/0004-637X/767/2/124. arxiv:1210.6362
Nitz AH, Dent T, Dal Canton T, Fairhurst S, Brown DA (2017) Detecting binary compact-object mergers with gravitational waves: understanding and Improving the sensitivity of the PyCBC search. Astrophys J 849:118. https://doi.org/10.3847/1538-4357/aa8f50. arxiv:1705.01513
Nitz AH et al (2013) Accuracy of gravitational waveform models for observing neutron-star–black-hole binaries in Advanced LIGO. Phys Rev D 88:124039. https://doi.org/10.1103/PhysRevD.88.124039. arxiv:1307.1757
Nuttall L et al (2015) Improving the data quality of Advanced LIGO based on early engineering run results. Class Quantum Grav 32:245005. https://doi.org/10.1088/0264-9381/32/24/245005. arxiv:1508.07316
Ott C (2009) The gravitational wave signature of core-collapse supernovae. Class Quantum Grav 26:063001. https://doi.org/10.1088/0264-9381/26/6/063001. arxiv:0809.0695
Ott C, Reisswig C, Schnetter E, O’Connor E, Sperhake U, Löffler F, Diener P, Abdikamalov E, Hawke I, Burrows A (2011) Dynamics and gravitational wave signature of collapsar formation. Phys Rev Lett 106:161103. https://doi.org/10.1103/PhysRevLett.106.161103. arxiv:1012.1853
Owen BJ (1996) Search templates for gravitational waves from inspiraling binaries: choice of template spacing. Phys Rev D 53:6749–6761. https://doi.org/10.1103/PhysRevD.53.6749. arxiv:gr-qc/9511032
Owen BJ, Sathyaprakash B (1999) Matched filtering of gravitational waves from inspiraling compact binaries: computational cost and template placement. Phys Rev D 60:022002. https://doi.org/10.1103/PhysRevD.60.022002. arxiv:gr-qc/9808076
Özel F, Freire P (2016) Masses, radii, and the equation of state of neutron stars. Annu Rev Astron Astrophys 54:401–440. https://doi.org/10.1146/annurev-astro-081915-023322. arxiv:1603.02698
Paczynski B (1986) Gamma-ray bursters at cosmological distances. Astrophys J Lett 308:L43–L46. https://doi.org/10.1086/184740
Palliyaguru NT et al (2016) Radio follow-up of gravitational wave triggers during Advanced LIGO O1. Astrophys J Lett 829:L28. https://doi.org/10.3847/2041-8205/829/2/L28. arxiv:1608.06518
Pan Y et al (2014) Inspiral-merger-ringdown waveforms of spinning, precessing black-hole binaries in the effective-one-body formalism. Phys Rev D 89:084006. https://doi.org/10.1103/PhysRevD.89.084006. arxiv:1307.6232
Pankow C, Chase EA, Coughlin S, Zevin M, Kalogera V (2018) Improvements in gravitational-wave sky localization with expanded networks of interferometers. Astrophys J Lett 854:L25. https://doi.org/10.3847/2041-8213/aaacd4. arxiv:1801.02674
Pankow C, Rizzo M, Rao K, Berry CPL, Kalogera V (2019) Localization of compact binary sources with second generation gravitational-wave interferometer networks. arXiv e-prints arXiv:1909.12961
Pannarale F, Ohme F (2014) Prospects for joint gravitational-wave and electromagnetic observations of neutron-star–black-hole coalescing binaries. Astrophys J Lett 791:L7. https://doi.org/10.1088/2041-8205/791/1/L7. arxiv:1406.6057
Paschalidis V (2017) General relativistic simulations of compact binary mergers as engines of short gamma-ray bursts. Class Quantum Grav 34:084002. https://doi.org/10.1088/1361-6382/aa61ce. arxiv:1611.01519
Patricelli B, Stamerra A, Razzano M, Pian E, Cella G (2018) Searching for gamma-ray counterparts to gravitational waves from merging binary neutron stars with the Cherenkov Telescope Array. J Cosmol Astropart Phys 05(2018)056. https://doi.org/10.1088/1475-7516/2018/05/056. arxiv:1801.05167
Patricelli B et al (2016) Prospects for joint observations of gravitational waves and gamma rays from merging neutron star binaries. J Cosmol Astropart Phys 11(2016)056. https://doi.org/10.1088/1475-7516/2016/11/056. arxiv:1606.06124
Perna R, Lazzati D, Giacomazzo B (2016) Short gamma-ray bursts from the merger of two black holes. Astrophys J Lett 821:L18. https://doi.org/10.3847/2041-8205/821/1/L18. arxiv:1602.05140
Pian E et al (2017) Spectroscopic identification of r-process nucleosynthesis in a double neutron star merger. Nature 551:67–70. https://doi.org/10.1038/nature24298. arxiv:1710.05858
Pitkin M, Reid S, Rowan S, Hough J (2011) Gravitational wave detection by interferometry (ground and space). Living Rev Relativ 14:5. https://doi.org/10.12942/lrr-2011-5. arxiv:1102.3355
Pol N, McLaughlin M, Lorimer DR (2019) Future prospects for ground-based gravitational-wave detectors: the galactic double neutron star merger rate revisited. Astrophys J 870:71. https://doi.org/10.3847/1538-4357/aaf006. arxiv:1811.04086
Pooley D, Kumar P, Wheeler JC (2017) GW170817 most likely made a black hole. ArXiv e-prints arxiv:1712.03240
Privitera S, Mohapatra SRP, Ajith P, Cannon K, Fotopoulos N, Frei MA, Hanna C, Weinstein AJ, Whelan JT (2014) Improving the sensitivity of a search for coalescing binary black holes with nonprecessing spins in gravitational wave data. Phys Rev D 89:024003. https://doi.org/10.1103/PhysRevD.89.024003. arxiv:1310.5633
Prix R (2007) Template-based searches for gravitational waves: efficient lattice covering of flat parameter spaces. Class Quantum Grav 24:S481–S490. https://doi.org/10.1088/0264-9381/24/19/S11. arxiv:0707.0428
Punturo M et al (2010) The Einstein telescope: a third-generation gravitational wave observatory. Class Quantum Grav 27:194002. https://doi.org/10.1088/0264-9381/27/19/194002
Pürrer M (2014) Frequency domain reduced order models for gravitational waves from aligned-spin compact binaries. Class Quantum Grav 31:195010. https://doi.org/10.1088/0264-9381/31/19/195010. arxiv:1402.4146
Racusin JL et al (2017) Searching the gamma-ray sky for counterparts to gravitational wave sources: Fermi GBM and LAT observations of LVT151012 and GW151226. Astrophys J 835:82. https://doi.org/10.3847/1538-4357/835/1/82. arxiv:1606.04901
Rana J, Singhal A, Gadre B, Bhalerao V, Bose S (2017) An enhanced method for scheduling observations of large sky error regions for finding optical counterparts to transients. Astrophys J 838:108. https://doi.org/10.3847/1538-4357/838/2/108. arxiv:1603.01689
Read JS et al (2013) Matter effects on binary neutron star waveforms. Phys Rev D 88:044042. https://doi.org/10.1103/PhysRevD.88.044042. arxiv:1306.4065
Roberts LF, Kasen D, Lee WH, Ramirez-Ruiz E (2011) Electromagnetic transients powered by nuclear decay in the tidal tails of coalescing compact binaries. Astrophys J Lett 736(1):L21. https://doi.org/10.1088/2041-8205/736/1/L21. arxiv:1104.5504
Rodriguez CL et al (2014) Basic parameter estimation of binary neutron star systems by the Advanced LIGO/Virgo network. Astrophys J 784:119. https://doi.org/10.1088/0004-637X/784/2/119. arxiv:1309.3273
Ross MP, Venkateswara K, Hagedorn CA, Gundlach JH, Kissel JS, Warner J, Radkins H, Shaffer TJ, Coughlin MW, Bodin P (2017) Low frequency tilt seismology with a precision ground rotation sensor. Seismol Res Lett 89:67–76. https://doi.org/10.1785/0220170148. arxiv:1707.03084
Rosswog S (2005) Mergers of neutron star–black hole binaries with small mass ratios: nucleosynthesis, gamma-ray bursts, and electromagnetic transients. Astrophys J 634(2):1202–1213. https://doi.org/10.1086/497062. arxiv:astro-ph/0508138
Rosswog S et al (2017) Detectability of compact binary merger macronovae. Class Quantum Grav 34:104001. https://doi.org/10.1088/1361-6382/aa68a9. arxiv:1611.09822
Röver C, Meyer R, Christensen N (2007a) Coherent Bayesian inference on compact binary inspirals using a network of interferometric gravitational wave detectors. Phys Rev D 75:062004. https://doi.org/10.1103/PhysRevD.75.062004. arxiv:gr-qc/0609131
Röver C, Meyer R, Guidi GM, Viceré A, Christensen N (2007b) Coherent Bayesian analysis of inspiral signals. Class Quantum Grav 24:S607–S615. https://doi.org/10.1088/0264-9381/24/19/S23. arxiv:0707.3962
Ruan JJ, Nynka M, Haggard D, Kalogera V, Evans P (2018) Brightening X-ray emission from GW170817/GRB170817A: further evidence for an outflow. Astrophys J Lett 853:L4. https://doi.org/10.3847/2041-8213/aaa4f3. arxiv:1712.02809
Sachdev S, Caudill S, Fong H, Lo RKL, Messick C, Mukherjee D, Magee R, Tsukada L, Blackburn K, Brady P, Brockill P, Cannon K, Chamberlin SJ, Chatterjee D, Creighton JDE, Godwin P, Gupta A, Hanna C, Kapadia S, Lang RN, Li TGF, Meacher D, Pace A, Privitera S, Sadeghian L, Wade L, Wade M, Weinstein A, Liting Xiao S (2019) The GstLAL search analysis methods for compact binary mergers in Advanced LIGO’s second and Advanced Virgo’s first observing runs. arXiv e-prints arxiv:1901.08580
Salafia OS, Colpi M, Branchesi M, Chassande-Mottin E, Ghirlanda G, Ghisellini G, Vergani S (2017) Where and when: optimal scheduling of the electromagnetic follow-up of gravitational-wave events based on counterpart lightcurve models. Astrophys J 846:62. https://doi.org/10.3847/1538-4357/aa850e. arxiv:1704.05851
Sathyaprakash BS, Dhurandhar SV (1991) Choice of filters for the detection of gravitational waves from coalescing binaries. Phys Rev D 44:3819–3834. https://doi.org/10.1103/PhysRevD.44.3819
Sathyaprakash BS, Schutz BF (2009) Physics, astrophysics and cosmology with gravitational waves. Living Rev Relativ 12:2. https://doi.org/10.12942/lrr-2009-2. arxiv:0903.0338
Savchenko V et al (2016) INTEGRAL upper limits on gamma-ray emission associated with the gravitational wave event GW150914. Astrophys J Lett 820:L36. https://doi.org/10.3847/2041-8205/820/2/L36. arxiv:1602.04180
Savchenko V et al (2017a) INTEGRAL detection of the first prompt gamma-ray signal coincident with the gravitational-wave event GW170817. Astrophys J Lett 848:L15. https://doi.org/10.3847/2041-8213/aa8f94. arxiv:1710.05449
Savchenko V et al (2017b) INTEGRAL observations of GW170104. Astrophys J Lett 846:L23. https://doi.org/10.3847/2041-8213/aa87ae. arxiv:1707.03719
Schmidt P, Ohme F, Hannam M (2015) Towards models of gravitational waveforms from generic binaries II: modelling precession effects with a single effective precession parameter. Phys Rev D 91:024043. https://doi.org/10.1103/PhysRevD.91.024043. arxiv:1408.1810
Schnittman JD (2013) Astrophysics of super-massive black hole mergers. Class Quantum Grav 30:244007. https://doi.org/10.1088/0264-9381/30/24/244007. arxiv:1307.3542
Schutz BF (1986) Determining the Hubble constant from gravitational wave observations. Nature 323:310–311. https://doi.org/10.1038/323310a0
Sesana A (2016) Prospects for multiband gravitational-wave astronomy after GW150914. Phys Rev Lett 116:231102. https://doi.org/10.1103/PhysRevLett.116.231102. arxiv:1602.06951
Shappee BJ et al (2017) Early spectra of the gravitational wave source GW170817: evolution of a neutron star merger. Science 358:1574. https://doi.org/10.1126/science.aaq0186. arxiv:1710.05432
Siebert MR et al (2017) The unprecedented properties of the first electromagnetic counterpart to a gravitational wave source. Astrophys J Lett 848:L26. https://doi.org/10.3847/2041-8213/aa905e. arxiv:1710.05440
Singer LP, Price LR (2016) Rapid Bayesian position reconstruction for gravitational-wave transients. Phys Rev D 93:024013. https://doi.org/10.1103/PhysRevD.93.024013. arxiv:1508.03634
Singer LP et al (2014) The first two years of electromagnetic follow-up with Advanced LIGO and Virgo. Astrophys J 795:105. https://doi.org/10.1088/0004-637X/795/2/105. arxiv:1404.5623
Singer LP et al (2016a) Going the distance: mapping host galaxies of LIGO and Virgo sources in three dimensions using local cosmography and targeted follow-up. Astrophys J Lett 829:L15. https://doi.org/10.3847/2041-8205/829/1/L15. arxiv:1603.07333
Singer LP et al (2016b) Supplement: going the distance: mapping host galaxies of LIGO and Virgo sources in three dimensions using local cosmography and targeted follow-up. Astrophys J Suppl 226:10. https://doi.org/10.3847/0067-0049/226/1/10. arxiv:1605.04242
van der Sluys MV, Röver C, Stroeer A, Christensen N, Kalogera V, Meyer R, Vecchio A (2008) Gravitational-wave astronomy with inspiral signals of spinning compact-object binaries. Astrophys J Lett 688:L61. https://doi.org/10.1086/595279. arxiv:0710.1897
Smartt SJ et al (2016) A search for an optical counterpart to the gravitational wave event GW151226. Astrophys J Lett 827:L40. https://doi.org/10.3847/2041-8205/827/2/L40. arxiv:1606.04795
Smartt SJ et al (2017) A kilonova as the electromagnetic counterpart to a gravitational-wave source. Nature 551(7678):75–79. https://doi.org/10.1038/nature24303. arxiv:1710.05841
Smith R, Field SE, Blackburn K, Haster CJ, Pürrer M, Raymond V, Schmidt P (2016) Fast and accurate inference on gravitational waves from precessing compact binaries. Phys Rev D 94:044031. https://doi.org/10.1103/PhysRevD.94.044031. arxiv:1604.08253
Soares-Santos M, Palmese A, Hartley W, Annis J, Garcia-Bellido J, Lahav O, Doctor Z, et al (2019) First measurement of the Hubble constant from a dark standard siren using the dark energy survey galaxies and the LIGO/Virgo binary-black-hole merger GW170814. Astrophys J Lett 876:L7. https://doi.org/10.3847/2041-8213/ab14f1. arxiv:1901.01540
Soares-Santos M et al (2017) The electromagnetic counterpart of the binary neutron star merger LIGO/Virgo GW170817. I. Discovery of the optical counterpart using the dark energy camera. Astrophys J Lett 848:L16. https://doi.org/10.3847/2041-8213/aa9059. arxiv:1710.05459
Somiya K (2012) Detector configuration of KAGRA: the Japanese cryogenic gravitational-wave detector. Class Quantum Grav 29:124007. https://doi.org/10.1088/0264-9381/29/12/124007. arxiv:1111.7185
Spera M, Mapelli M, Giacobbo N, Trani AA, Bressan A, Costa G (2019) Merging black hole binaries with the SEVN code. Mon Not R Astron Soc 485:889–907. https://doi.org/10.1093/mnras/stz359. arxiv:1809.04605
Staley A et al (2014) Achieving resonance in the Advanced LIGO gravitational-wave interferometer. Class Quantum Grav 31:245010. https://doi.org/10.1088/0264-9381/31/24/245010
Stevenson S, Berry CPL, Mandel I (2017) Hierarchical analysis of gravitational-wave measurements of binary black hole spin-orbit misalignments. Mon Not R Astron Soc 471:2801–2811. https://doi.org/10.1093/mnras/stx1764. arxiv:1703.06873
Stone NC, Metzger BD, Haiman Z (2017) Assisted inspirals of stellar mass black holes embedded in AGN disks. Mon Not R Astron Soc 464:946–954. https://doi.org/10.1093/mnras/stw2260. arxiv:1602.04226
Sutton P (2013) A rule of thumb for the detectability of gravitational-wave bursts. ArXiv e-prints arxiv:1304.0210
Sutton PJ et al (2010) X-Pipeline: an analysis package for autonomous gravitational-wave burst searches. New J Phys 12:053034. https://doi.org/10.1088/1367-2630/12/5/053034. arxiv:0908.3665
Tanaka M, Hotokezaka K (2013) Radiative transfer simulations of neutron star merger ejecta. Astrophys J 775(2):113. https://doi.org/10.1088/0004-637X/775/2/113. arxiv:1306.3742
Tanvir NR et al (2017) The emergence of a lanthanide-rich kilonova following the merger of two neutron stars. Astrophys J Lett 848:L27. https://doi.org/10.3847/2041-8213/aa90b6. arxiv:1710.05455
Taracchini A et al (2014) Effective-one-body model for black-hole binaries with generic mass ratios and spins. Phys Rev D 89:061502. https://doi.org/10.1103/PhysRevD.89.061502. arxiv:1311.2544
Tavani M et al (2016) AGILE observations of the gravitational wave event GW150914. Astrophys J Lett 825:L4. https://doi.org/10.3847/2041-8205/825/1/L4. arxiv:1604.00955
Thrane E, Coughlin M (2013) Searching for gravitational-wave transients with a qualitative signal model: seedless clustering strategies. Phys Rev D 88:083010. https://doi.org/10.1103/PhysRevD.88.083010. arxiv:1308.5292
Thrane E, Mandic V, Christensen N (2015) Detecting very long-lived gravitational-wave transients lasting hours to weeks. Phys Rev D 91:104021. https://doi.org/10.1103/PhysRevD.91.104021. arxiv:1501.06648
Thrane E et al (2011) Long gravitational-wave transients and associated detection strategies for a network of terrestrial interferometers. Phys Rev D 83:083004. https://doi.org/10.1103/PhysRevD.83.083004. arxiv:1012.2150
Troja E, Piro L, Ryan G, van Eerten H, Ricci R, Wieringa MH, Lotti S, Sakamoto T, Cenko SB (2018) The outflow structure of GW170817 from late-time broad-band observations. Mon Not R Astron Soc 478:L18–L23. https://doi.org/10.1093/mnrasl/sly061
Troja E et al (2017) The X-ray counterpart to the gravitational wave event GW170817. Nature 551:71–74. https://doi.org/10.1038/nature24290. arxiv:1710.05433
Usman SA et al (2016) The PyCBC search for gravitational waves from compact binary coalescence. Class Quantum Grav 33:215004. https://doi.org/10.1088/0264-9381/33/21/215004. arxiv:1508.02357
Valenti S, Sand DJ, Yang S, Cappellaro E, Tartaglia L, Corsi A, Jha SW, Reichart DE, Haislip J, Kouprianov V (2017) The discovery of the electromagnetic counterpart of GW170817: Kilonova AT 2017gfo/DLT17ck. Astrophys J Lett 848:L24. https://doi.org/10.3847/2041-8213/aa8edf. arxiv:1710.05854
Vallisneri M, Kanner J, Williams R, Weinstein A, Stephens B (2015) The LIGO open science center. J Phys: Conf Ser 610:012021. https://doi.org/10.1088/1742-6596/610/1/012021. arxiv:1410.4839
Vangioni E, Goriely S, Daigne F, François P, Belczynski K (2016) Cosmic neutron-star merger rate and gravitational waves constrained by the r-process nucleosynthesis. Mon Not R Astron Soc 455:17–34. https://doi.org/10.1093/mnras/stv2296. arxiv:1501.01115
Vecchio A (2004) LISA observations of rapidly spinning massive black hole binary systems. Phys Rev D 70:042001. https://doi.org/10.1103/PhysRevD.70.042001. arxiv:astro-ph/0304051
Veitch J, Mandel I, Aylott B, Farr B, Raymond V, Rodriguez C, van der Sluys M, Kalogera V, Vecchio A (2012) Estimating parameters of coalescing compact binaries with proposed advanced detector networks. Phys Rev D 85:104045. https://doi.org/10.1103/PhysRevD.85.104045. arxiv:1201.1195
Veitch J et al (2015) Parameter estimation for compact binaries with ground-based gravitational-wave observations using the LALInference software library. Phys Rev D 91:042003. https://doi.org/10.1103/PhysRevD.91.042003. arxiv:1409.7215
Venkateswara K, Hagedorn CA, Turner MD, Arp T, Gundlach JH (2014) A high-precision mechanical absolute-rotation sensor. Rev Sci Instrum 85:015005. https://doi.org/10.1063/1.4862816. arxiv:1401.4412
Venumadhav T, Zackay B, Roulet J, Dai L, Zaldarriaga M (2019) New search pipeline for compact binary mergers: results for binary black holes in the first observing run of Advanced LIGO. Phys Rev D 100:023011. https://doi.org/10.1103/PhysRevD.100.023011. arxiv:1902.10341
Venumadhav T, Zackay B, Roulet J, Dai L, Zaldarriaga M (2020) New binary black hole mergers in the second observing run of Advanced LIGO and Advanced Virgo. Phys. Rev. D 101:083030. https://doi.org/10.1103/PhysRevD.101.083030. arxiv:1904.07214
Verrecchia F et al (2017) AGILE observations of the gravitational-wave source GW170104. Astrophys J Lett 847:L20. https://doi.org/10.3847/2041-8213/aa8224. arxiv:1706.00029
Villar VA et al (2017) The combined ultraviolet, optical, and near-infrared light curves of the kilonova associated with the binary neutron star merger GW170817: unified data set, analytic models, and physical implications. Astrophys J Lett 851:L21. https://doi.org/10.3847/2041-8213/aa9c84. arxiv:1710.11576
Vinciguerra S, Veitch J, Mandel I (2017) Accelerating gravitational wave parameter estimation with multi-band template interpolation. Class Quantum Grav 34:115006. https://doi.org/10.1088/1361-6382/aa6d44. arxiv:1703.02062
Vinciguerra S, Branchesi M, Ciolfi R, Mandel I, Neijssel CJ, Stratta G (2019) SAPREMO: a simplified algorithm for predicting detections of electromagnetic transients in surveys. Mon Not R Astron Soc 484:332–344. https://doi.org/10.1093/mnras/sty3490. arxiv:1809.08641
Vitale S (2016) Multiband gravitational-wave astronomy: parameter estimation and tests of general relativity with space- and ground-based detectors. Phys Rev Lett 117:051102. https://doi.org/10.1103/PhysRevLett.117.051102. arxiv:1605.01037
Vitale S, Zanolin M (2011) Application of asymptotic expansions for maximum likelihood estimators’ errors to gravitational waves from binary mergers: the network case. Phys Rev D 84:104020. https://doi.org/10.1103/PhysRevD.84.104020. arxiv:1108.2410
Vitale S, Del Pozzo W, Li TG, Van Den Broeck C, Mandel I, Aylott B, Veitch J (2012) Effect of calibration errors on Bayesian parameter estimation for gravitational wave signals from inspiral binary systems in the advanced detectors era. Phys Rev D 85:064034. https://doi.org/10.1103/PhysRevD.85.064034. arxiv:1111.3044
Vitale S, Lynch R, Veitch J, Raymond V, Sturani R (2014) Measuring the spin of black holes in binary systems using gravitational waves. Phys Rev Lett 112:251101. https://doi.org/10.1103/PhysRevLett.112.251101. arxiv:1403.0129
Walker M, Agnew AF, Bidler J, Lundgren A, Macedo A, Macleod D, Massinger TJ, Patane O, Smith JR (2018) Identifying correlations between LIGO’s astronomical range and auxiliary sensors using lasso regression. Class Quantum Grav 35:225002. https://doi.org/10.1088/1361-6382/aae593. arxiv:1807.02592
Woosley SE (2016) The progenitor of GW150914. Astrophys J Lett 824:L10. https://doi.org/10.3847/2041-8205/824/1/L10. arxiv:1603.00511
Yakunin KN et al (2010) Gravitational waves from core collapse supernovae. Class Quantum Grav 27:194005. https://doi.org/10.1088/0264-9381/27/19/194005. arxiv:1005.0779
Yang S, Valenti S, Cappellaro E, Sand DJ, Tartaglia L, Corsi A, Reichart DE, Haislip J, Kouprianov V (2017) An empirical limit on the kilonova rate from the DLT40 one day cadence Supernova Survey. Astrophys J Lett 851:L48. https://doi.org/10.3847/2041-8213/aaa07d. arxiv:1710.05864
Zackay B, Venumadhav T, Dai L, Roulet J, Zaldarriaga M (2019) Highly spinning and aligned binary black hole merger in the Advanced LIGO first observing run. Phys Rev D 100:023007. https://doi.org/10.1103/PhysRevD.100.023007. arxiv:1902.10331
Zevin M, Pankow C, Rodriguez CL, Sampson L, Chase E, Kalogera V, Rasio FA (2017) Constraining Formation Models of Binary Black Holes with Gravitational-wave Observations. Astrophys J 846:82. https://doi.org/10.3847/1538-4357/aa8408. arxiv:1704.07379
Zevin M et al (2017) Gravity spy: integrating advanced LIGO detector characterization, machine learning, and citizen science. Class Quantum Grav 34:064003. https://doi.org/10.1088/1361-6382/aa5cea. arxiv:1611.04596
Zhang BB et al (2018) A peculiar low-luminosity short gamma-ray burst from a double neutron star merger progenitor. Nature Commun 9:447. https://doi.org/10.1038/s41467-018-02847-3. arxiv:1710.05851
Acknowledgements
The authors gratefully acknowledge the support of the United States National Science Foundation (NSF) for the construction and operation of the LIGO Laboratory and Advanced LIGO as well as the Science and Technology Facilities Council (STFC) of the United Kingdom, the Max Planck Society (MPS), and the State of Niedersachsen/Germany for support of the construction of Advanced LIGO and construction and operation of the GEO600 detector. Additional support for Advanced LIGO was provided by the Australian Research Council. The authors gratefully acknowledge the Italian Istituto Nazionale di Fisica Nucleare (INFN), the French Centre National de la Recherche Scientifique (CNRS) and the Foundation for Fundamental Research on Matter supported by the Netherlands Organisation for Scientific Research, for the construction and operation of the Virgo detector and the creation and support of the EGO consortium. The authors also gratefully acknowledge research support from these agencies as well as by the Council of Scientific and Industrial Research of India, the Department of Science and Technology, India, the Science and Engineering Research Board (SERB), India, the Ministry of Human Resource Development, India, the Spanish Agencia Estatal de Investigación, the Vicepresidència i Conselleria d’Innovació, Recerca i Turisme and the Conselleria d’Educació i Universitat del Govern de les Illes Balears, the Conselleria d’Educació, Investigació, Cultura i Esport de la Generalitat Valenciana, the National Science Centre of Poland, the Swiss National Science Foundation (SNSF), the Russian Foundation for Basic Research, the Russian Science Foundation, the European Commission, the European Regional Development Funds (ERDF), the Royal Society, the Scottish Funding Council, the Scottish Universities Physics Alliance, the Hungarian Scientific Research Fund (OTKA), the Lyon Institute of Origins (LIO), the Paris Île-de-France Region, the National Research, Development and Innovation Office Hungary (NKFIH), the National Research Foundation of Korea, Industry Canada and the Province of Ontario through the Ministry of Economic Development and Innovation, the Natural Science and Engineering Research Council Canada, the Canadian Institute for Advanced Research, the Brazilian Ministry of Science, Technology, Innovations, and Communications, the International Center for Theoretical Physics South American Institute for Fundamental Research (ICTP-SAIFR), the Research Grants Council of Hong Kong, the National Natural Science Foundation of China (NSFC), the Leverhulme Trust, the Research Corporation, the Ministry of Science and Technology (MOST), Taiwan and the Kavli Foundation. The authors gratefully acknowledge the support of the NSF, STFC, INFN and CNRS for provision of computational resources. This work was supported by MEXT, JSPS Leading-edge Research Infrastructure Program, JSPS Grant-in-Aid for Specially Promoted Research 26000005, JSPS Grant-in-Aid for Scientific Research on Innovative Areas 2905: JP17H06358, JP17H06361 and JP17H06364, JSPS Core-to-Core Program A. Advanced Research Networks, JSPS Grant-in-Aid for Scientific Research (S) 17H06133, the joint research program of the Institute for Cosmic Ray Research, University of Tokyo in Japan, National Research Foundation (NRF) and Computing Infrastructure Project of KISTI-GSDC in Korea, Academia Sinica (AS), AS Grid Center (ASGC) and the Ministry of Science and Technology (MoST) in Taiwan under grants including AS-CDA-105-M06. This article has been assigned LIGO Document number P1200087, Virgo Document number VIR-0288A-12, and KAGRA Document number JGW-P1808427.
Author information
Authors and Affiliations
Consortia
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
A Changes between versions
A Changes between versions
Since publication of the previous version (Abbott et al. 2018f), several updates to the document have been made. The most significant changes are that we now frame our projections in terms of observing runs, we include final results from O2, and we updated our localization projections to include KAGRA as a fourth detector. Key differences are outlined below.
1.1 A.1 Updates to Sect. 2, “Construction, commissioning and observing phases”:
-
1.
The observing roadmap is now discussed in terms of observing runs rather than the “Early”,“Mid”, “Late” nomenclature used in previous versions.
-
2.
The O1 and O2 discussion happens earlier in the section. Future planned runs are discussed at the end. Discussion of O1 and O2 duty cycle now occurs in this section.
-
3.
A subsection has been added for O3.
-
4.
Table 2 and Fig. 1 have been updated to include the actual performance in O1 and O2, and in the first months of O3 (which started April 1st 2019 and is ongoing). The projected performance is given for O4 and O5.
-
5.
Table 2 also includes ranges for NSBH and Burst sources.
-
6.
There is now a discussion, with projected sensitivities, of upgrades to aLIGO and AdV.
-
7.
Figure 2 now extends past 2026, showing LIGO-India joining the network.
1.2 A.2 Updates to Sect. 3, “Searches for gravitational-wave transients”:
-
1.
We include the latest O2 results from (Abbott et al. 2018c, a).
-
2.
The discussion is considerably shortened compared to the previous version.
-
3.
There is a new subsection describing the O1 and O2 follow-up program.
-
4.
New localization simulations have been performed for three-detector and four-detector networks at O3 and O4 sensitivities. Results are presented for both CBC and Burst signals.
-
5.
The CBC simulation used astrophysically motivated populations of sources with properties consistent with the O1 and O2 results.
-
6.
CBC signal sky-localization now includes luminosity distance and comoving volume in addition to area.
-
7.
The anticipated sky-localization is given as before for BNS systems and additionally for NSBH and BBH systems.
-
8.
The burst simulation used astrophysically motivated populations of BBHs and IMBHBs in contrast to the previous version which included a variety of generic waveform morphologies.
-
9.
Figure 3 has new results from O2 and updated results from O1.
-
10.
Figure 4 is updated to show the effect of adding KAGRA to the network.
-
11.
Figure 5 shows sky maps of the confident GW events detected during O1 and O2 (Abbott et al. 2018c, 2019d) by the low-latency and full offline analysis. The previous version of this figure showed the sky location for a simulated BNS signal.
-
12.
Table 3 is new. It shows luminosity distance and localization of the O1 and O2 confident detections obtained by the low-latency and full offline analysis.
-
13.
Figure 6 has updated localization plots for compact binary mergers (BNS, BBH, NSBH) in O3 and O4. This includes also luminosity distance and comoving volume expectations. The figure no longer shows the performance of LALInference, which is evaluated to be consistent with BAYESTAR. The previous version of this figure had results for BNS systems alone.
-
14.
Figure 7 has updated localization plots for burst sources in O3 and O4. The figure no longer shows the umodeled search performance for generic waveform morphologies, but for BBH and IMBHB signals.
-
15.
Table 4 is new; it shows the range of the \(\textsc {cWB}\) searches for BBH and IMBHB mergers.
1.3 A. 3 Section 4, “Public alerts”
-
1.
This is a new section describing how alerts are issued publicly and automatically starting starting from O3.
-
2.
Includes a brief discussion of alerts sent during O3a.
1.4 A. 4 Updates to Sect. 5, “Observing scenarios”:
-
1.
The scenarios are now discussed in terms of observing runs up to O5.
-
2.
Discussion of the O1 and O2 runs has been moved to earlier in the paper.
-
3.
New simulations have been performed for the expected number of detections in O3 and O4. We give the range of plausible detection counts in a one-calendar-year observing run instead of range of estimated rates per unit time as given in the previous version. The detection expectations are given also for NSBH and BBH mergers.
-
4.
The rate simulation uses source properties and astrophysical rates consistent with the O1 and O2 results.
-
5.
Table 5, which replaces Table 3 in the previous version, has been updated significantly. In particular, we no longer quote ranges since these are reported in Sect. 2. We show anticipated numbers for O3 and O4 only; prior run information is no longer reported here. We added estimates of comoving volume localization, and information for BBH and NSBH mergers.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Abbott, B.P., Abbott, R., Abbott, T.D. et al. Prospects for observing and localizing gravitational-wave transients with Advanced LIGO, Advanced Virgo and KAGRA. Living Rev Relativ 23, 3 (2020). https://doi.org/10.1007/s41114-020-00026-9
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s41114-020-00026-9
Keywords
Article history
Latest
Prospects for observing and localizing gravitational-wave transients with Advanced LIGO, Advanced Virgo and KAGRA- Published:
- 28 September 2020
- Received:
- 01 October 2019
- Accepted:
- 27 May 2020
DOI: https://doi.org/10.1007/s41114-020-00026-9
- Prospects for observing and localizing gravitational-wave transients with Advanced LIGO, Advanced Virgo and KAGRA
- Published:
- 26 April 2018
- Received:
- 11 September 2017
- Accepted:
- 07 February 2018
DOI: https://doi.org/10.1007/s41114-018-0012-9
Original
Prospects for Observing and Localizing Gravitational-Wave Transients with Advanced LIGO and Advanced Virgo- Published:
- 08 February 2016
- Accepted:
- 22 January 2016
DOI: https://doi.org/10.1007/lrr-2016-1