

Abstract
In this review article, we provide an introduction to ferrogels, i.e. polymeric gels with embedded magnetic particles. Due to the interplay between magnetic and elastic properties of these materials, they are promising candidates for engineering and biomedical applications such as actuation and controlled drug release. Particular emphasis will be put on the polymer architecture of magnetic gels since it controls the degrees of freedom of the magnetic particles in the gel, and it is important for the particle-polymer coupling determining the mechanisms available for the gel deformation in magnetic fields. We report on the different polymer architectures that have been realized so far, and provide an overview of synthesis strategies and experimental techniques for the characterization of these materials. We further focus on theoretical and simulational studies carried out on magnetic gels, and highlight their contributions towards understanding the influence of the gels' polymer architecture.
Export citation and abstract BibTeX RIS
1. Introduction
Magnetic gels, also called ferrogels, are composite materials consisting of magnetic particles embedded within a polymer matrix. They are stimuli-responsive, as their shape, elasticity and motion can be controlled by an external magnetic field [1–5]. Ferrogels can be manufactured from biocompatible components. Furthermore, biological matter is tolerant to magnetic fields, making these materials ideal candidates for bio-medical applications. It is worth mentioning that the term 'magnetic gel' is mostly applied to magnetic nanoparticles being immersed in a liquid-swollen gel, i.e. a hydrogel. The term magnetic elastomer, on the other hand, typically refers to rubbers into which larger magnetic particles, often micron-sized magnetic beads, are embedded. Magnetic gels [6, 7] and elastomers [8] share many properties. Particularly, the mechanisms for shape change under external magnetic fields discussed in section 1.1 pertain to both, gels and elastomers. Magnetic gels tend to be softer than magnetic elastomers due to the presence of a fluid phase as solvent can be taken up or released by the materials. While magnetic elastomers tend to be used in engineering applications such as soft robotics, the focus for magnetic gels is on biomedical applications. This article is mainly concerned with magnetic gels.
This review is structured as follows. In the remainder of the introduction, we will discuss the applications of magnetic gels and their underlying mechanisms. Furthermore, we will introduce the materials' constituents, namely magnetic particles and hydrogels. In section 2, an overview of the polymer architectures commonly used in magnetic gels is provided. This is followed in section 3 by a discussion of experimental aspects such as the ferrogels' synthesis and characterization. In section 4, a brief overview of theoretical approaches towards the study of magnetic gels is given. We then describe simulation models (section 5) developed to study magnetic gels and discuss their contribution to an understanding of the gels' polymer architecture and its influence on the gels' properties. We close with our conclusions in section 6.
1.1. Applications and the underlying mechanisms
The envisioned applications of magnetic gels fall into two broad categories, namely, actuation and transport. Actuation mostly relies on the ability of magnetic gels to change their shape when an external magnetic field is applied. It may be used, e.g. for small and soft robotics [9, 10]. In transport applications, on the other hand, a motion of the gel controlled by an external field is demanded.
The control of a magnetic gel by an external field can occur in several ways. First, a field gradient exerts a force on single magnetic particles, which is then transferred onto the polymer matrix. Second, an AC magnetic field can heat magnetic particles and thereby changing the properties of the surrounding polymers. Third, a homogeneous field can re-align the magnetic moments and change the effective interaction between them. Lastly, when there is a direct coupling of the rotation of magnetic particles to the polymer matrix, the torque exerted by an external field gets transferred onto the matrix.
Let us now discuss these couplings in more detail. First, in a field gradient, the magnetic particles tend to move to the region with a higher field. This can be used for actuation by fixing the gel at one end. Then stretching, shrinkage, bending and torsion can be achieved [11–13]. In transport applications, the gel is not fixed. The magnetic component is used to move the gel. The motion is caused by the force created by the externally applied magnetic field gradient. On the other hand, the hydrogel component of the ferrogel is used as a carrier for a drug or another chemical substance. The use of magnetic gels in transport applications has been demonstrated, e.g. for water treatment [14], antibody concentration [1], moving enzymes to a specific location [15], as well as drug release by 'shaking' a magnetic gel using an AC magnetic field [16].
In AC magnetic fields, an energy dissipation from the magnetic particles is observed, originating from losses during the repeated remagnetization and relaxation of the particles. The relaxation mechanism can be Néel or Brown relaxation or both, depending on the nature of the particle-matrix interaction and the resulting particle mobility. The heating rate depends on particle type and concentration as well as the field parameters, and can thus be tuned to achieve either gentle or more intense heating. As a result of the temperature increase, the swelling or shrinking of the gel can be influenced (see figure 1) [17], opening the pathway to actuation or drug release mechanisms [18–21]. Internal magnetic heating is advantageous in comparison to external heating, since a diffusion-limiting phase separation is not observed due to an isotropic heating process [13]. Additionally, the thermal response may also be coupled to the chemo-mechanical or magneto-mechanical properties, resulting in multiple-stimuli sensitive materials [19, 22, 23].

Figure 1. Two drug release mechanisms under magnetic heating. Gentle magnetic heating causes the temperature-responsive polymer shell to shrink, squeezing drug out from the nanoparticle. Intense magnetic heating additionally ruptures the nanoparticle, triggering an instant drug release. Reprinted from [17], Copyright 2009, with permission from Elsevier.
Download figure:
Standard image High-resolution imageFerrogels can deform not only in magnetic field gradients but also in homogeneous fields [3, 13, 24–30]. There are two mechanisms. In the first one, the external field influences the average interaction between the magnetic moments in the system. When no field is applied, the magnetic moments are randomly aligned and their interaction is isotropic. When a field is applied, the magnetic moments co-align, and their average interaction becomes direction-dependent. In most cases, this leads to an elongation parallel to the field, and a shrinkage in the perpendicular direction. On the macroscopic scale, this can be conveniently described in terms of the demagnetization energy [24]. The prerequisite for this deformation mechanism is an appropriate density of strongly interacting magnetic particles. I.e. the average magnetic interaction between the particles needs to be strong enough to overcome both, thermal noise and elastic forces. Depending on the material and the density, this implies a particle diameter of ten nanometers and more with appropriate magnetic moment.
The second mechanism for a gel deformation in a homogeneous field can be present in magnetic gels in which the magnetic particles act as the cross-linkers [26, 28, 29]. Here, the polymer chains are covalently grafted onto the surface of the magnetic nanoparticles. When these particles rotate due to an external field, they exert a strain on the polymer matrix, which in turn may deform. Simulations show that, in two-dimensions, this shrinkage is isotropic, whereas a larger shrinkage parallel to the field is found in three dimensions [28, 29]. Additionally, simulations indicate that this mechanism may also lead to auxetic gels [31]. A further requirement for this mechanism to be present is that magnetic particles re-orient their magnetic moments by a rotation of the particle as a whole (Brownian mechanism).
The polymer architecture of a gel used for actuation applications requires a gel that is soft enough that the forces created by the magnetic particles are able to deform it. Additionally, depending on the desired deformation mechanism, a direct coupling between the magnetic moments and the polymers may be needed. For transport applications, on the other hand, there should be more freedom, as the magnetic gradient forces used to move the gel do not depend on the polymer architecture. Here, the polymer can be tailored to allow the uptake and, if desired, the release of the substance to be transported.
1.2. Magnetic nanoparticles
The magnetic nanoparticles used in magnetic gels can be made of various materials, such as metals (e.g. Co, Fe), iron oxides like maghemite, hematite, magnetite, or other metal ferrites such as cobalt ferrite. While macroscopic magnetic materials are known to develop domains, the formation of these domains is energetically not favorable for smaller particles. The diameter at which the transition occurs depends on the material. For magnetite, it is estimated to occur at 150 nm [32]. The magnetic moment of a multidomain magnetic particle can be changed by an external field, as the magnetic domains grow, shrink and re-align, i.e. the particle is magnetizable. For a smaller, single-domain, particle, however, the magnitude of the magnetic moment is constant. The moment can, however, re-align to an external magnetic field. This occurs by two mechanisms. The Brownian mechanism refers to the case where the moment re-aligns by a rotation of the particle as a whole. The Néel mechanism refers to a re-alignment of the magnetic moment within the particle.
Brownian relaxation is the dominant mechanism in larger particles with high anisotropy constants. The two mechanisms also can co-exist, when their respective relaxation times are similar. In the context of magnetic gels, the Brownian mechanism is of special importance, as it allows for a direct coupling between the orientation of a magnetic moment and the polymers, when they are chemically bound to specific spots on the particle's surface. A deformation of the gel by means of changing average interactions between the magnetic moments, on the other hand, does not depend on a particular relaxation mechanism.
Magnetic particles can be produced by two approaches [32]. In the top–down approach, larger magnetic objects are split into smaller parts, e.g. by grinding or laser ablation. In the bottom–up approach, the particles are created by condensation of low molecular precursors. For more details regarding the synthesis of magnetic particles, see section 3.1. To prevent the magnetic particles from irreversibly agglomerating due to dipolar and van der Waals forces, and subsequently sedimenting, they need to be stabilized. This can be achieved by coating the surface of the particles with surfactants or polymers, but an electrostatic stabilization is also possible and is often used for biomedical applications. The minimal requirements for particle stabilization can be derived from consideration of particle-particle and particle-field interactions.
1.2.1. Interaction between magnetic nanoparticles.
For theoretical studies and for simulations, it is necessary to have a simple model for describing magnetic nanoparticles and their interactions. Typically, a dipolar soft or hard sphere is used, in which the interaction of two particles consists of two components. These are the dipole–dipole interaction, capturing the magnetic interaction between the particles' magnetic moments, and an excluded volume interaction preventing overlap between the particles, respectively. While the dipole moment of magnetic nanoparticles is, strictly speaking, not concentrated in a single point in the particles' center, its approximation as a point dipole has proven suitable for describing the microstructure of magnetic fluids. The interaction between two point dipoles is given by

where  denotes the vacuum permittivity,
denotes the vacuum permittivity,  and
and  denote the particles' magnetic moment, and
denote the particles' magnetic moment, and  their distance. The interaction scales with the cube of the inverse distance. It has a global minimum when both dipole moments and the vector connecting the particles are co-aligned. This is called the 'head-to-tail' configuration. The 'head-to-head' configuration, on the other hand, corresponds to the global maximum.
their distance. The interaction scales with the cube of the inverse distance. It has a global minimum when both dipole moments and the vector connecting the particles are co-aligned. This is called the 'head-to-tail' configuration. The 'head-to-head' configuration, on the other hand, corresponds to the global maximum.
In the context of ferrofluids and magnetic gels, the strength of the dipolar interaction is often specified in terms of the dipolar interaction parameter λ, which compares the minimum energy per particle for two touching particles to the thermal energy. We have

where m denotes the magnitude of the particles' magnetic moment and σ their diameter. For single domain particles, typical values for λ range from below one to eight. When λ is significantly larger than one, the magnetic particles will form clusters such as chains, rings and branched structures [33–38]. Their orientation is isotropically distributed, as long as no external magnetic field is applied. The discussion here is restricted to monodisperse particles, which have the same diameter and magnetic moment. When magnetic particles of different sizes are present, the largest ones tend to play an important role in the behavior of the system. This is, because the magnetic moment of the particles m scales like the third power of the core diameter, i.e.  . Moreover, the square of the magnetic moment enters into the dipole–dipole interaction (equation (1)). For these reasons, considerable effort is taken in many experiments to achieve a low polydispersity.
. Moreover, the square of the magnetic moment enters into the dipole–dipole interaction (equation (1)). For these reasons, considerable effort is taken in many experiments to achieve a low polydispersity.
The excluded volume interaction can either be a hard or soft sphere potential. Hard spheres are used for simplicity, in particular in theoretical works and in Monte Carlo simulations. Soft spheres are used in molecular dynamics simulations, which cannot easily cope with infinitely steep potentials, or if the steric repulsion between the coating layers of the particles is to be captured. A typical soft sphere potential is the purely repulsive Weeks–Chandler–Andersen potential [39]

where  is an energy scale, r denotes the distance, and σ the particle diameter. The potential is a Lennard-Jones potential cut-off at its minimum and shifted such that the minimum corresponds to an energy value of zero. Some studies made use of more advanced repulsive potentials than equation (3) for modelling the surface coating [40, 41].
is an energy scale, r denotes the distance, and σ the particle diameter. The potential is a Lennard-Jones potential cut-off at its minimum and shifted such that the minimum corresponds to an energy value of zero. Some studies made use of more advanced repulsive potentials than equation (3) for modelling the surface coating [40, 41].
The dipolar hard sphere model has been used extensively since the early 1990s for studying the phase behavior of dipolar fluids [42–46], besides that it was used mainly in Monte Carlo simulations to calculate ground states for assemblies of magnetic particles [47–50], for the study of a ferrofluid's magnetic response at low densities and temperatures [51], and in a theoretical model of a one-dimensional magnetic gel [52]. The phase behavior of dipolar soft sphere models, and Stockmayer fluids, which are dipolar fluids with an additional attractive interaction, typically of the Lennard-Jones type, have been investigated extensively as well [53–56]. The soft sphere models are at the heart of most molecular dynamics simulations of magnetic fluids and ferrogels [29, 30, 33, 35, 57–62]. While the choice between magnetic hard and soft sphere models is often based on technical considerations, soft spheres have to be used in those cases, where the surface coating of magnetic particles plays an important role.
It is worth mentioning that the dipolar sphere models are well suited for single domain particles, but their applicability to micron-sized magnetizable particles is limited. This is because adjacent magnetizable particles influence each others' magnetization. The interaction between neighboring particles is then attractive for a much wider range of configurations than suggested by the dipole–dipole interaction [63].
1.2.2. Response to an external magnetic field.
In addition to the interaction between two magnetic particles, the particle-field interaction is relevant. For particles with a permanent magnetic moment, it is given by

where  is the particles magnetic moment, and
is the particles magnetic moment, and  the external magnetic field. To compare the minimum Zeeman energy per particle to the thermal one, the Langevin parameter
the external magnetic field. To compare the minimum Zeeman energy per particle to the thermal one, the Langevin parameter

is used. Here,  denotes the thermal energy.
denotes the thermal energy.
The magnetic response of a system of single-domain particles to an applied external magnetic field is superparamagnetic. As long as no external field is applied, the magnetic moments of the particles are randomly aligned, yielding a net magnetic moment of zero for the system. When a field is applied, the magnetic moments tend to align parallel to it, resulting in a significantly enhanced magnetization of the system. To first approximation, the magnetic response is that of a system of non-interacting dipoles. Using the Langevin parameter α (equation (5)), the magnetization is given by

where Ms is the saturation magnetization given by the sum of all magnetic moments mi in the system normalized by volume V:

and  is called the Langevin function. A plot of the Langevin magnetization can be found in figure 2. When the interactions between magnetic particles become relevant, the magnetization generally is increased, in particular for intermediate external fields. This is, because in addition to the external field, magnetic particles then are influenced by the field created by the surrounding particles. Assuming a Langevin-type response of the 'surrounding' magnetic particles, one gets the first order mean field approach
is called the Langevin function. A plot of the Langevin magnetization can be found in figure 2. When the interactions between magnetic particles become relevant, the magnetization generally is increased, in particular for intermediate external fields. This is, because in addition to the external field, magnetic particles then are influenced by the field created by the surrounding particles. Assuming a Langevin-type response of the 'surrounding' magnetic particles, one gets the first order mean field approach

where c depends on the system's dimension (monolayer or bulk) and the density of magnetic particles [64–69]. It is worth mentioning that theoretical models beyond the mean field approach are needed to describe this enhanced magnetic response.
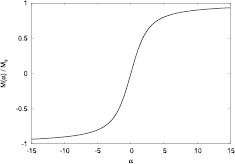
Figure 2. Langevin magnetization curve for non-interacting dipoles under the influence of an external magnetic field (equation (6)). While the interaction of magnetic particles changes the magnetization in particular in the range of intermediate fields, the general shape is the same for most superparamagnetic systems.
Download figure:
Standard image High-resolution imageIn nearly all cases, an external magnetic field enhances the formation of clusters of magnetic particles discussed above. This has also been quantified in many simulations [33–35, 70]. Moreover, these clusters tend to be chain-like and co-aligned with the magnetic field. The formation of these chain-like aggregates further enhances the magnetic response of the system, resulting in a higher initial susceptibility. It is given by the slope of the magnetization curve in the zero field limit. For a general magnetization law  , we have
, we have

A visualization of the spatial distribution of magnetic particles for magnetic fluids with and without an external magnetic field applied obtained from simulations is shown in figure 3. The simulations make use of the soft dipolar sphere model discussed above.

Figure 3. Particle microstructure of a ferrofluid at 3% volume fraction with a dipolar interaction parameter (equation (2)) of  without an external magnetic field (left) and with a magnetic field of
without an external magnetic field (left) and with a magnetic field of  (equation (5)). In both cases, the magnetic particles form clusters. When a field is applied, these clusters tend to be chain-like and co-aligned with the field. (Images based on data from [71].)
(equation (5)). In both cases, the magnetic particles form clusters. When a field is applied, these clusters tend to be chain-like and co-aligned with the field. (Images based on data from [71].)
Download figure:
Standard image High-resolution imageIn magnetic gels, however, the magnetization can fall below the one for non-interacting particles (equation (6)), when the magnetic moment relaxes via a rotation of the particle as a whole (Brownian mechanism). In this case, the re-alignment of the moment can be coupled to the polymer matrix, which resists the re-alignment [26, 28, 72]. Additionally, the magnetic response can be influenced by the particle microstructure frozen into a magnetic gel and by its shape [27, 30].
The model described above, e.g. equation (6), is valid independent of the magnetic relaxation mechanism (Néel or Brownian). For static properties, the relaxation mechanism only becomes relevant for gels in which the magnetic particles act as cross-linkers (see sections 1.1 and 2). In those cases, an explicit coupling between the rotation of the magnetic particles and the surrounding polymer has to be added to the model. When studying dynamic properties, the relaxation mechanism becomes important, because a relaxation by the Brownian mechanism can couple to the surrounding polymers, e.g. via hydrodynamic interactions. This is not the case for the Néel mechanism.
1.3. Hydrogels
A lyogel is a three-dimensional network swollen by a fluid [73]. While in general, the gelator can be constituted also from small molecules, inorganic solids or colloids, we will here concentrate on polymer-based gels. If the dispersant consists of water, the gel is called hydrogel. A typical property of a gel is the bicontinuity of both phases, which means a continuous spreading of the dispersed component and the dispersion medium over the whole system [74]. The amount of liquid taken up by a hydrogel can be considerable. Hence, the polymer only makes up a small fraction of its total mass. This swelling of the gel can originate from both, the solvation energy, and the entropy of the polymer chains, but also from the osmotic pressure of ions in the gel for the cases that the gel is charged. The elasticity of hydrogels can be tuned over several orders of magnitude from below 1 Pa to several kPa. The network of polymer gels may consist of synthetic or biopolymers. Synthetic polymers used for the hydrogel formation are e.g. poly(vinyl alcohol)s, poly(N-vinyl pyrrolidone)s, poly(hydroxyalkyl methacrylate)s, poly(acrylamide)s, and poly(acrylic acid)s [75]. Biopolymers found in nature are e.g. collagen or cross-linked dextran [75]. More details on the synthesis of polymeric gels can be found in section 3.
There is a distinction between physical and chemical gels, depending on the nature of the cross-links, responsible for the formation of the three-dimensional network. In chemical gels, the cross-links are covalent bonds, whereas in physical gels they can originate from van der Waals interactions, hydrogen bonds, or Coulomb interactions.
In chemically cross-linked gels, the cross-linking pattern and the individual linkages are permanent, given by the covalent nature of the bonds. In physical gels, on the other hand, the cross-links break and re-form in a dynamic equilibrium dependent on temperature, resulting in a network structure. Many physical gels can undergo a sol–gel phase transformation at a critical solution temperature, beyond which the gel turns into a fluid state. This transition was described by Flory and Stockmayer [76, 77]. The description was extended to the 'percolation model' by Stauffer and Zallen [78, 79]. The sol–gel transformation has been suggested as a means to produce injectable magnetic gels [80].
In magnetic hybrid gels, combining magnetic particles and polymer, the cross-linking may even be due to the chemical linkage between the polymer and the particles. This is called a particle cross-linked gel or magnetic node network.
2. Overview on ferrogels with different polymer architectures
Let us now turn to the polymer architectures being used for magnetic gels as well as the coupling between the magnetic particles and the polymers. In this review, the term architecture is understood as follows. It describes the three-dimensional polymer molecular strucure, together with the arrangement and distribution of magnetic nanoparticles within the network, and the dominating interaction spectrum of the two components. Different interactions and forces may dominate between the two components, the polymer and the particles. Kickelbick established a classification for hybrid materials based on the nature of the interactions [81]. Class I materials are materials that show weak physical interactions such as van der Waals forces, hydrogen bonding, or weak electrostatic interactions. In contrast to this, Class II materials show permanent chemical or strong physical interactions between the two species such as covalent bonding or strong hydrogen bonding, strong electrostatic interactions or strong coordinative bonds. There is rather a steady transition than a clear boundary between the strength of the forces. Starting from this definition of hybrid materials, different magnetic gel architectures can be identified and classified (see figure 4).

Figure 4. Schematic drawing of different polymer gel frameworks with incorporated nanoparticles; (a) chemically cross-linked polymer network with entrapped particles, (b) chemically cross-linked polymer network with physical interactions between polymer and embedded particles (Class I type), (c) particle cross-linked hybrid network (chemical interactions, Class II type) and (d) magnetic particle loaded bridged micelles.
Download figure:
Standard image High-resolution imageA chemically or physically cross-linked polymer, where the particles are entrapped by the meshes, showing only weak interactions with the polymer, is called a Class I hybrid gel. A majority of magnetic gels are Class I hybrid gels, which are synthesized either by cross-linking a polymer in the presence of the particles, or by generation of the particles in an existing gel (see section 3). These gels are available in a wide range of polymer and particle composition [82–87].
Another architecture is a chemically or physically cross-linked polymer with entrapped particles, that shows significant physical interactions with the matrix polymer, such as coordinative or hydrogen bonds, with the polymer matrix [11, 88, 89]. One example for a physically linked Class I magnetic gel consists of magnetite ( ) nanoparticles incorporated in a polyvinyl alcohol (PVA) polymer network [11]. PVA gels are widely used and investigated. Hydrogen bonding is omnipresent in PVA gels, due to a high number of hydroxyl groups [90].
) nanoparticles incorporated in a polyvinyl alcohol (PVA) polymer network [11]. PVA gels are widely used and investigated. Hydrogen bonding is omnipresent in PVA gels, due to a high number of hydroxyl groups [90].
By incorporation of the magnetic particles in a particle cross-linked hybrid network, showing covalent bonds between the particles and the polymer, a new type of architecture is obtained. This type of gel is an example for Class II hybrid materials [89, 91–95]. Here, the additional use of cross-linkers is waived, and instead the particles are functionalized to form covalent bonds with the polymer network. In these networks the polymer is linked to the polymer surface in a high number of attaching points, whereas the number of cross-linked chains in conventional cross-linking is limited. Such hydrogels based on e.g. poly(ethylene glycol) (PEG) and acrylamide [91], poly(acrylamide) [93] and polysaccharide [92] in combination with cobalt ferrite ( ) nanoparticles can be found in the literature. A review, dealing exclusively with magnetic particle cross-linked gels, can be found in [96].
) nanoparticles can be found in the literature. A review, dealing exclusively with magnetic particle cross-linked gels, can be found in [96].
The three main architectures in magnetic polymer gels described above all have their strengths and weaknesses. Which architecture is the best to be chosen depends on the specific research question. For magnetic gels showing no or only weak interactions with the matrix, particle loss is possible due to a high flexibility of the particles, depending on the polymer mesh characteristics. Particle loss can mean a potential source for toxicity (depending on the nature of the particles), and is accompanied by a partial loss of magnetic properties. Additionally, there is an increased probability for particle-particle interactions, inhomogeneities and particle agglomeration due to the magnetic character of the particles. Therefore, an effective stabilization of the magnetic particles in solution is required. On the other hand, the high mobility of the particles in non-particle linked systems is advantageous for the motion of particles in a magnetic field or for effective internal magnetic heating. In magnetic node networks, particle loss, diffusion and agglomeration of the particles are prevented. Additionally, the mechanical stability of the polymer network is increased due to the incorporation of the particles [93]. A further advantage of magnetic node networks is the possibility to gain information on the direct surrounding of the particles, especially particle-matrix interactions, by analyzing the magnetic properties of the particles [93, 97].
Another interesting method for the incorporation of magnetic particles inside a gel is the inclusion of these into micelles which self-assemble into an ordered structure [19, 80, 98, 99]. Therefore, e.g. Pluronic copolymers (ABA-type triblock copolymers of PPO and PEO) are used to generate this type of hybrid material [80]. The gel network structure is e.g. formed by bridging the reverse micelles [98]. Additionally, the micelles may be used as nanoreactors for the synthesis of the magnetic nanoparticles [98].
Some unique features of magnetic gels resulting from a combination of the properties of the single components, such as size effects, stimuli-sensitivity and anisotropy are introduced in the following. Besides macroscopically magnetic gels, there are also micro- and nanogels, which are polymeric particles including magnetic nanoparticles. A review on magnetic colloids can be found in [32]. Various types of magnetic colloids can be obtained by using different methods. The synthesis of the magnetic nanoparticles takes place by using the polymeric particles as seeds [100], the particles may be encapsulated after adsorption to the polymeric particles [101], may be functionalized with a polymeric shell using emulsion or precipitation polymerization [102], or a surface-initiated polymeric brush may be applied on the particle surface [103, 104]. Some of these microspheres show thermoresponsive and superparamagnetic behavior [105]. One very simple one-pot strategy for the synthesis of magnetic PVA gel beads is described in [106]. Here, magnetic gel beads are synthesized by dropping a mixture of salts and PVA solutions into an alkaline solution.
By combining the magnetic particles with stimuli-sensitive polymers, smart materials with multiple functionalities can be obtained. A stimuli-sensitive polymer responds reversibly to an external trigger like e.g. temperature, pH, ionic strength, electric or magnetic fields, light or changes in the chemical environment, which leads to a change in the conformation or phase behavior of the polymer [13]. The most important trigger for magnetic hybrid gels is the magnetic field, which can lead to an internal heating of the material or mechanical manipulation. The field-dependent properties of such gels are described in section 1.1. A more general review on stimuli-sensitive hybrid hydrogels is found in [13]. Multiple stimuli sensitive materials are an expansion of the potential of magnetic gels and promising candidates for a number of potential applications.
Of special interest is anisotropic behavior in magnetic gels. The structural anisotropy can be found in direction dependent elastic modulus, swelling and magnetic properties. One can distinguish between the anisotropic behavior resulting from the arrangement of the magnetic particles within the gel or from the polymeric matrix. In the presence of an isotropic matrix, mechanical (e.g. direction dependent elastic modulus) and magnetic anisotropy is obtained by the synthesis of the magnetic gel in presence of an external magnetic field [13]. After removal of the field, the anisotropy is retained [107]. Anisotropic gels are also obtained by a swelling process [108]. Spindle-like hematite particle cross-linked gels were synthesized in the presence of different magnetic fields and their magnetic properties were analyzed (see figure 5). The anisotropy was investigated by angle dependent magnetic measurements. It was found that the characteristics of the effective magnetic anisotropy of the gel are adjustable by the cross-linking density. Anisotropy is further obtained when a chain formation of the particles occurs. The direction of the particle chains is varied by the direction of the applied magnetic field [108]. The combination of a magnetic polymer with an anisotropic matrix (e.g. liquid crystalline domains, lamellar layers or wormlike micelles) can create interesting effects [22, 109, 110].
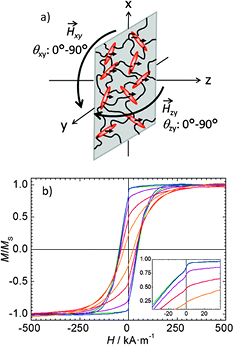
Figure 5. (a) Schematic illustration of the setup geometry and axes annotations for (b) angle-dependent magnetization measurements of an anisotropic spindle-like hematite particle cross-linked PAAm gel. Angle  :
:  (green),
(green),  (blue),
(blue),  (purple),
(purple),  (red),
(red),  (orange). Adapted from [95] with permission of The Royal Society of Chemistry.
(orange). Adapted from [95] with permission of The Royal Society of Chemistry.
Download figure:
Standard image High-resolution image3. Experimental aspects
3.1. Synthesis strategies towards magnetic polymer gels and control of their network structure
Hybrid materials combining the properties of inorganic magnetic particles and organic polymeric gels can be obtained by applying different synthesis strategies. One big challenge during magnetic hydrogel synthesis is ensuring the homogeneity of the organic polymer and the inorganic particles included in the hybrid material. In this section the two main components, the polymer and the magnetic particles, are first considered individually and then the focus is placed on the combination of these two materials, leading to the desired hybrid materials.
For the preparation of the organic part of the hybrid gel, two approaches can be followed: the polymerization of monomers and the cross-linking of existing polymers, named polymer-analogous reaction. The synthesis of polymeric gels is summarized in detail in a number of reviews [75, 111–114]. Different ways for the polymerization of monomers have proved effective. One commonly performed polymerization method is free-radical chain polymerization that is used for the conversion of hydrophilic acrylates, methacrylates, acrylamides or vinylpyrrolidones. Examples for these polymerization reactions include the 'living'/controlled radical polymerization, including the atom transfer radical polymerization (ATRP), and the reversible addition-fragmentation chain transfer polymerization (RAFT) [115–117]. Additionally, the insertion of a small amount of a divinyl cross-linking agent allows the formation of a cross-linking between the chains [75]. The strengths of this polymerization approach are a low fraction of side reactions, compatibility with many functional groups and an easy implementation with commercially available reagents.
Besides the polymerization of monomers, the polymer-analogous reaction, a modification or functionalization of natural or synthetic polymers, is used for the preparation of polymeric gels. A very common example for the modification of existing synthetic polymers is poly(vinyl alcohol) (PVA) that can be synthesized via the hydrolysis of poly(vinyl acetate) [75]. The hydroxyl groups are used for the formation of cross-links or physical interactions, such as hydrogen bonding.
In polymer-analogous reactions, the process allows the assembly of preformed building blocks, a prediction of the properties of the resulting hybrid gels, and thus by converging the characteristic properties of the building blocks. In this respect natural polymers such as carbohydrates and proteins benefit from their low toxicity, low production costs, and their biocompatibility and -degradability. These are often composed of structural units containing starch [118], cellulose [119, 120], chitosan [121], carrageenan [122], or proteins [123]. A popular example for a natural polymer that forms a hydrogel is gelatin. Its gelation was already investigated by Hardy in 1899 [124] and it is now still getting the attention of scientists.
To control the size and the properties of nanoparticles, usually a bottom–up method starting from molecular precursors is used. There is a variety of particle synthesis routes available, to choose from depending on the requirements on the particles (e.g. magnetic properties, size and size distribution, applicable reaction conditions). Most common reactions for the preparation of magnetic particles are co-precipitation [125], microemulsion-based synthesis [126], thermal or ultrasonic decomposition [127, 128], hydrothermal synthesis [129], and the sol–gel method [130]. The co-precipitation method is widely used because of its simple feasibility and scalability and results in hydrophilic particles being an important advantage for their incorporation into hydrogels. The synthesis of monodisperse magnetic particles can be realized using thermal decomposition methods, where the size and morphology of the particles is e.g. depending on the precursor molecules, solvents, surfactants, the reaction temperature, the heating rate and the reaction time [131]. There is a broad spectrum of magnetic particles available. Common are pure metal particles like Co, Fe and Ni [132–135], metal oxides like magnetite ( ) [136], maghemite (γ-
) [136], maghemite (γ- ) [137], ferrites (e.g.
) [137], ferrites (e.g.  ,
,  ,
,  ) [127, 138], or alloys like
) [127, 138], or alloys like  and FePt [139, 140]. The type of magnetic material and the particle size and shape determine their specific characteristics. Pure metal particles e.g. Fe or Co profit from a high saturation magnetization and magnetocrystalline anisotropy, whereas they are poorly stable against oxidation [38]. The ferrites, on the other hand, are highly oxidation stable and additionally possess good magnetic properties, but differ in their magnetocrystalline anisotropy. Magnetite is commonly used for biological and medical purposes due to nontoxicity and an uncritical metabolism pathway. Detailed descriptions for magnetic nanoparticle synthesis and different pathways can be found in a number of reviews [141–144].
and FePt [139, 140]. The type of magnetic material and the particle size and shape determine their specific characteristics. Pure metal particles e.g. Fe or Co profit from a high saturation magnetization and magnetocrystalline anisotropy, whereas they are poorly stable against oxidation [38]. The ferrites, on the other hand, are highly oxidation stable and additionally possess good magnetic properties, but differ in their magnetocrystalline anisotropy. Magnetite is commonly used for biological and medical purposes due to nontoxicity and an uncritical metabolism pathway. Detailed descriptions for magnetic nanoparticle synthesis and different pathways can be found in a number of reviews [141–144].
Diverse strategies for the incorporation of the magnetic particles into the polymer network can be followed whereby different types of magnetic gels are obtained. These strategies are visualized in figure 6. Using the polymer-first approach, the polymer network is formed in the first step, followed by an addition of the magnetic component. However, the synthesis of the magnetic particles may also take place simultaneously with the polymer synthesis step. For the polymer-first approach, it can be distinguished between the synthesis of the particles in presence of the polymeric gel [84] and the swelling of the gel with a previously prepared ferrofluid. Also microgels can be used as template for the particle synthesis [145]. A further option to produce a ferrogel is loading an already existing microgel with magnetic cobalt ferrite ( ) particles using electrostatic interactions between the polymer matrix and the particles [146].
) particles using electrostatic interactions between the polymer matrix and the particles [146].

Figure 6. Schematic drawing of different synthesis strategies towards magnetic polymer gels. One can distinguish between the simultaneous one-pot synthesis of the polymer and the magnetic particles, or the polymer- or particle-first method with subsequent synthesis of the other component. Only the particle-first method with polymer-analogue cross-linking results in magnetic node networks, all other methods result in magnetic particle filled networks.
Download figure:
Standard image High-resolution imageA strength of the polymer-first approach is that the previously prepared polymer network can be synthesized in a controlled way and completely characterized without any disturbance of particles. However, the in situ synthesis of magnetic particles is partly restricted, since within the gel, wet and mild reaction conditions are predetermined. Thus, particle synthesis is limited to sol–gel processes [147–150], or metal salts reduction methods [151–153]. Additionally, the particle size can be limited due to the present polymer mesh size and a limited diffusivity of the particles. On the other hand, for the loading of a polymer network with particles, the particles need to be sufficiently stabilized and the mesh size and particle-polymer interaction can affect the loading process.
In contrast to that, in the particle-first approach, the particles are prepared in the beginning, followed by the formation of the polymer network. This is achieved by entrapping the particles inside the polymeric network by a polymerization in presence of the particles. For this reason, a ferrogel can be obtained by free radical polymerization of acrylamide in the presence of a previously prepared magnetic particle dispersion of e.g. maghemite ( -
- ), hematite (
), hematite ( ) or iron (Fe) nanoparticles [82, 83, 85]. Here, cross-linking molecules, such as
) or iron (Fe) nanoparticles [82, 83, 85]. Here, cross-linking molecules, such as  -methylenebis(acrylamide) or a functionalized heteropolyanion are needed [83].
-methylenebis(acrylamide) or a functionalized heteropolyanion are needed [83].
The particle-first approach provides the possibility to synthesize the particles in all available synthesis procedures without restrictions in the reaction conditions, e.g. a synthesis of the particles in a certain medium with subsequent phase transfer is possible. Also the particles can be fully characterized before the polymer is synthesized. At the same time, however, the chemical and colloidal stability of the particles has to be assured during the gel synthesis, requiring control on the pH and ionic strengths of the reaction system. Furthermore, the particles can interfere with the network formation, and the percolation kinetics show a high impact on the process of particle trapping and thus may influence the final internal structure of the gel. Depending on the relative size of the particles and the gel meshes (typically a few nm to a few hundred nm) and on the nature of interaction, swelling of the gel in a good solvent of the polymer phase may cause a release of particles [88]. This process of release depends on the size of the particles, as well as the size of the polymer meshes. Corresponding size effects will be described further in section 6.
All methods described so far for the synthesis of these magnetic hybrid materials result in magnetic particle filled networks, referred to as Class I materials before. To obtain magnetic node networks, linked by a covalent bond between the polymer and the particle, a cross-linking is needed. To directly link the polymer to the particle surface, a variation of tools is available: e.g. the grafting-onto, the grafting-from or the grafting-through method (figure 7).

Figure 7. Schematic drawing of the (a) grafting-onto, (b) grafting-from and (c) grafting-through method used for the functionalization of particles with a polymer. I stands for the initiator group.
Download figure:
Standard image High-resolution imageFor the grafting-onto method a polymer is functionalized with a reactive anchor group A, which is able to adsorb or bond to the particle surface. Groups that can be used to anchor polymers are phosphonic acids [154], carboxylic acids [155], trialkoxysilanes [156, 157], cysteines [158], amines [159] or dopamines [160]. For example maghemite (γ- ) particles are functionalized with poly(1-vinylimidazole) using a reactive trimethoxysilyl terminal group [161].
) particles are functionalized with poly(1-vinylimidazole) using a reactive trimethoxysilyl terminal group [161].
For the grafting-from method, also called surface initiated polymerization (SIP), the inorganic particles are surface-functionalized with a reactive initiator group I, and the polymerization is started from the surface of the particles with the chain growing radically from the particle surface. As magnetic material e.g. spherical magnetite ( ) [157], elongated hematite (
) [157], elongated hematite ( ) [94] or spherical cobalt ferrite (
) [94] or spherical cobalt ferrite ( ) [91–93] nanoparticles are surface functionalized and linked to the matrix material. For the application of different polymerizable functionalities (e.g. methacrylate or amine groups) to the particle surface, alkoxylsilanes can be used to form poly(alkylsiloxane) monolayers [92–94, 157]. As polymer matrices poly(acrylamide) (PMMA) [93, 94, 157], PEG and acrylamide [91] or carboxymethylcellulose [92] are used. To obtain macroscopic gels starting from the described microscopic gels, still cross-linking (chemically or physically) is needed and the ratio of particles to polymer influences the properties of the resulting polymer meshes.
) [91–93] nanoparticles are surface functionalized and linked to the matrix material. For the application of different polymerizable functionalities (e.g. methacrylate or amine groups) to the particle surface, alkoxylsilanes can be used to form poly(alkylsiloxane) monolayers [92–94, 157]. As polymer matrices poly(acrylamide) (PMMA) [93, 94, 157], PEG and acrylamide [91] or carboxymethylcellulose [92] are used. To obtain macroscopic gels starting from the described microscopic gels, still cross-linking (chemically or physically) is needed and the ratio of particles to polymer influences the properties of the resulting polymer meshes.
A method, not requiring additional cross-linking is the grafting-through method. In this method, the particles are functionalized with a monomer unit that is copolymerized with a low-molecular comonomer. In the propagation process, free or surface attached monomer units are added. This way, the monomer on the surface is integrated into the growing chain, resulting in anchoring of the polymer segments on the particle surface. The grafting-through mechanism can be used e.g. to surface functionalize magnetic particles with poly(ethylene glycol), or for the free radical polymerization of NiPAAm in aqueous solution in the presence of 3-methacryloxypropyl triethoxysilane (MTS) modified nanoparticles [157, 162].
The grafting-from method generally results in higher grafting densities than the grafting-onto mechanism [155]. On the other hand, an advantage of the grafting-onto mechanism is that the polymer can be prepared previously in a controlled way and completely characterized before it is functionalized to the particle surface.
The homogeneity of the polymer network is an important factor in the ferrogel synthesis. In the polymer-first approach a homogeneous network structure can be obtained by suitable synthesis methods, but the challenge here is a homogeneous distribution of the particles within the network. For the particle-first methods, including particle cross-linked gels, the homogeneity of the architecture is controlled by the stability of the particles and by the percolation kinetics.
3.2. Characterization of magnetic gels
Magnetic gels can be considered as solid materials since they have a defined shape to which they return after deformation. However, the dynamics of the internal molecular processes are closer to the liquid state. Therefore, it is of high interest to analyze their behavior on different time and length scales, and by a proper combination of the methods available, in order to get a large information space. The investigation methods are partially restricted, since it is e.g. not possible to carry out nuclear magnetic resonance spectroscopy due to the magnetic character of the nanoparticles. But still, there is a toolbox of methods to investigate the structure, morphology, composition, thermal behavior, magnetic properties and the interactions within magnetic gels.
To obtain information on the architecture and homogeneity of the embedding of the particles inside the network, the following techniques are helpful. In order to get three dimensional images on the ferrogel by applying a non-invasive method with a resolution in the range of a few micrometers, x-ray microtomography is used (see figure 8(a)) [5, 93, 163]).
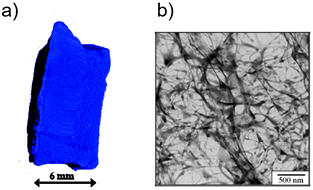
Figure 8. (a) X-ray tomogram of a swollen PAAm-based gel cross-linked via  nanoparticles and (b) TEM image of a swollen, freeze fractured, freeze dried PAAm-based gel cross-linked via
nanoparticles and (b) TEM image of a swollen, freeze fractured, freeze dried PAAm-based gel cross-linked via  nanoparticles. Reprinted with permission from [93]. Copyright (2011) American Chemical Society.
nanoparticles. Reprinted with permission from [93]. Copyright (2011) American Chemical Society.
Download figure:
Standard image High-resolution imageVery promising for the characterization of ferrogels are scattering experiments, meaning small-angle x-ray scattering (SAXS) and small-angle neutron scattering (SANS), as well as x-ray diffraction (XRD) experiments. Whereas SAXS gives information on e.g. the size, size distribution or field-induced self-assembly and aggregates of magnetic particles [164], SANS provides individual access to the structure of the single components, the particles as well the polymer network, over a wide size range by the technique of selective contrast matching [165–167]. Characteristic sizes of the polymer like the mesh size or radius of gyration are accessible. A combination of scattering methods with the application of magnetic fields provides information on the orientation of particle aggregates and the rotational and translational freedom of the particles [166]. Using small angle neutron scattering of polarized neutrons (SANSPOL) results in a separation from the scattering of the magnetic and nonmagnetic contributions of the nanoparticles, allowing the characterization of magnetic and diamagnetic domains of nanoparticles [168].
The morphology, including the visualization of the cross-linking of the gel and the location of the particles within the gel, is investigated using scanning electron microscopy (SEM) and transmission electron microscopy (TEM) with a high resolution of a few nm. SEM allows the examination of the overall surface morphology, whereas TEM enables a localization of the particles within the network structure and the determination of the particle size. Here, the freeze-fracture direct imaging [169] has proven to be a useful method to map the microscopic structure of a swollen gel, including information on features of the network like the mesh size and junction points (see figure 8) [93].
Of special interest are the magnetic properties of the ferrogels. Vibrating sample magnetometry (VSM) provides with its quasi-static measurements information on typical magnetic parameters and characteristics such as hysteresis, saturation magnetization  , remanence
, remanence  or coercivity
or coercivity  . Besides this, parameters characterizing the hydrogel e.g. the volume-based equilibrium swelling degree
. Besides this, parameters characterizing the hydrogel e.g. the volume-based equilibrium swelling degree  , the gel factor f, and from this the relative shear moduli
, the gel factor f, and from this the relative shear moduli  , and even anisotropic behavior due to angular-dependent measurements are possible to obtain [87, 95]. Additionally, magnetic particle spectroscopy (MPS), magnetorelaxometry (MRX), and AC susceptometry (ACS) measurements are used for the characterization of the dynamic magnetic properties of the samples [170]. The spectral density of higher harmonics generated from dynamic magnetization behavior of the magnetic nanoparticles is measured in MPS experiments and gives access to magnetic particle imaging (MPI) [171] and information on the magnetic behavior and interactions between the nanoparticles. MRX is used to study the relaxation processes of predominantly magnetically blocked nanoparticles with a relaxation time
, and even anisotropic behavior due to angular-dependent measurements are possible to obtain [87, 95]. Additionally, magnetic particle spectroscopy (MPS), magnetorelaxometry (MRX), and AC susceptometry (ACS) measurements are used for the characterization of the dynamic magnetic properties of the samples [170]. The spectral density of higher harmonics generated from dynamic magnetization behavior of the magnetic nanoparticles is measured in MPS experiments and gives access to magnetic particle imaging (MPI) [171] and information on the magnetic behavior and interactions between the nanoparticles. MRX is used to study the relaxation processes of predominantly magnetically blocked nanoparticles with a relaxation time  s by analyzing the magnetization decay after switching off an applied field.
s by analyzing the magnetization decay after switching off an applied field.
The relaxation processes of the magnetic particles are investigated by using ACS measurements. Here, the dynamic magnetic response (complex susceptibility) to a frequency-sweeped sinoidal sinoidal magnetic field between 0.01 Hz–250 kHz gives access to e.g. characteristic relaxation times [97, 172]. Besides the investigation of the hydrodynamic properties of the magnetic particles, the evaluation of the dynamic magnetic behavior of these particles allows one to draw conclusion on the viscoelastic properties of the surrounding matrix, e.g. in terms of magnetic particle nanorheological experiments [82, 170, 173–175]. As an example, by using magnetically blocked nanoparticles with well-defined diffusion constant in Newtonian fluids, the extraction of frequency dependent rheological properties e.g. the viscosity or loss and storage moduli, of a complex matrix is possible. In the future, such experiments can be supplemented by simulations. In these, different modes of particle-matrix interactions such as those originating from excluded volume or hydrodynamics can be studied separately, potentially allowing one to identify their role in the overall dynamic behavior of the materials. Since the size of the probe particles is in the same range as the characteristic length scales within the gel, stringent deviations from the rheological performance as obtained by conventional methods are expected and discussed [176, 177], and due to this, particle-matrix interactions can be addressed. Using magnetic particle nanorheology it was found out that the mobility of particles is strongly influenced by the degree of cross-linking. This is also supported by Mössbauer spectroscopy measurements, which additionally attribute the results to the mesh size relatively to the particle size [82].
Mechanical properties and the swelling behavior of these hybrid materials are also investigated to reveal information on the dynamic processes in the mechanical performance of the hybrid gels. The swelling ratio that is determined using different methods, gives information on the degree of cross-linking [84], and can also be investigated in dependence of a switching magnetic field [178].
Generally, gels are soft materials. A review about how to increase the mechanical properties of hydrogels can be found in [179]. To describe the mechanical properties, the elastic modulus and the tensile strength are determined. For the measurement of these characteristics of hybrid hydrogels it is important to note that the properties can be time-dependent, fluid may get lost or be taken up during the measurement, and gels often fracture at much higher strength in comparison to conventional engineering materials [179]. Rheological measurements give access to the determination of e.g. the frequency-dependent storage  and loss moduli
and loss moduli  .
.
Additionally, stress–strain experiments can be performed for the determination of the mechanical properties of the ferrogel. The compressive modulus is investigated in the presence of a magnetic field, as well as the deformation of ferrogels induced by nonuniform magnetic fields [6, 180].
The thermal properties, including e.g. the melting temperature or the glass transition temperature, are analyzed using calorimetric methods. Therefore, thermal properties of magnetic hybrid gels are investigated by differential scanning calorimetry (DSC) and thermogravimetric analysis (TGA) [84].
4. Theoretical models
In this section, we will give a brief overview of the different theoretical approaches developed for magnetic gels so far. Generally speaking, they play an important role in understanding the basic principles behind the field-dependent response of magnetic gels. Due to its high degree of randomness, it is, however, very challenging to capture local details of the polymer architecture of the materials. Of course, there is no strict boundary between theories which are, numerically solved on the one hand, and simulations on the other hand.
A first set of models is based on lattice-based arrangements of magnetic particles [181, 182]. The microstructure can be tuned from plane-like to chain-like by modifying the lattice constants in the different Cartesian directions. The magnetic particles are then connected by entropic springs. On the regular lattices, the magnetic and elastic interactions between the particles can be calculated. The energy is then minimized by letting the lattice spacing in the three Cartesian directions vary. By additionally applying an external field, the magnetodeformation can be studied. Using these models, one can show that the microscopic particle distribution can have an effect on the gel's behaviour in a field. The limitation of many such models is, however, that only affine deformations are possible, which has been shown to limit their applicability [183, 184]. Roughly speaking, an affine or homogeneous deformation is one, in which every part of the material is deformed in the same way, where linear extension and shrinkage as well as shearing are considered. This implies that the re-alignment of chains of magnetic particles in a ferrogel can usually not be described by an affine deformation.
A second class of models uses continuum theory to predict a gel's deformation in an external magnetic field. In these models, the gel, including the immersed magnetic particles, is treated as an elastic continuum. The total energy is written as the sum of an elastic contribution, the interaction energy of an external field, and the magnetization of the sample, and the shape-dependent demagnetization energy. The gel is typically assumed to be linearly magnetizable, making the models relevant either for weak external fields, or for gels containing micron-sized, magnetizable particles rather than nanoparticles with permanent dipole moments. For spherical samples, an elongation parallel to the field is predicted [24]. It is also possible to incorporate aspects of the particle distribution in the gel. This is done by introducing a direction-dependent magnetization law [27, 185]. For example, in a uniaxial gel that has been cross-linked in an external field, the magnetic susceptibility is expected to be higher parallel to the uniaxial direction. It is also possible to use direction-dependent susceptibilities obtained from the lattice-based models discussed above. Somewhat related, in [186], macroscopic magnetoelastic properties of a uniaxial gel made of parallel chains of magnetic particles are calculated. Hysteresis effects in the magnetostrictive behavior of magnetic gels are discussed in [187]. The strength of these continuum models is that they are not restricted to small length scales and can be solved analytically. Due to the continuum description, they only partially cover the role of the particle distribution in the gel, which is important for field-controlled deformation. A combination of continuum linear elastic theory and expressions for the chain formation of magnetizable particle derived within a lattice model are used. The model gel shows hysteresis behavior because new chains are formed at a higher field than the field at which existing chains rupture.
Recently, a theory has been put forward [188] to calculate the matrix-mediated interactions between individual magnetic particles and the corresponding strain field in a linear elastic polymer matrix. The theory makes use of the mathematical similarities between Stokesian hydrodynamics and linear elasticity. It is an iterative procedure which first calculates the strain of the matrix caused by a force on one particle, and the resulting displacement of a second particle. Then, the stress is obtained which is needed to maintain the rigidity of that second particle's surface. The influence of this stress on the first particle then is calculated. Further refinement is obtained in additional iterations. The theory has been verified by experiments on a small number of magnetic particles in a soft gel. Moreover, it has been extended to particles that are close to a planar surface [189].
Classical density functional theory has also been applied to magnetic gels [190]. The basis of density functional theory is that, for given inter-particle interactions, the free energy is a functional of the spatial particle density distribution. This implies that the particle density distribution which minimizes the free energy is the equilibrium one. The challenge in applying density functional theory is to find an analytical expression for the mapping between density and free energy. In [190], a straight chain of magnetic particles was considered, and an approximate relation between the density of particles along the chain and the free energy was obtained. The results were also verified by means of Monte Carlo simulations. Two different cases were considered. While in the one, neighboring particles are connected by harmonic potentials, in the other, the chain is embedded in an elastic matrix and the resistance against stretching the chain comes from an estimate of the forces exerted by that matrix on the particles. In contrast to lattice-based models, density functional theory may offer a route to introduce more freedom in the magnetic particle distribution in the gel. Finding reliable functionals for estimating the free energy and working around the need for a formulation in which particles are indistinguishable remain significant challenges. This is the case, in particular, in two and three dimensions.
5. Simulation studies
In this section, we will provide an overview of simulational models and approaches used to study magnetic gels, and how they can contribute to better understanding the polymer architecture of magnetic gels.
5.1. Basic considerations
5.1.1. Simulation approaches for different length scales.
The most important consideration for a ferrogel simulation is the scale on which the modeling takes place. This has to be decided based on the research question in mind or for which application the modelling is intended. On the coarsest level, a full continuum approach is normally used. In these simulations [191, 192], neither the structure of the polymers nor the individual magnetic particles are resolved. Instead, the material is described by continuum fields such as magnetization, stress, and strain, as well as relations between these fields which describe the material's elastic and magnetostrictive behaviour. The model is then solved using a finite element method. Such simulations are suitable to describe magnetic elastomers on a scale relevant for engineering applications such as soft robotics. They will, however, usually not be able to resolve the microscopic features or mechanisms of the materials, as these depend on the configuration of magnetic particles and polymers, which are not captured in these simulations.
On the next level of resolution, a continuum level can still be used. The magnetic particles are, however, explicitly modelled. This is done by assigning a high elastic modulus and a magnetization to those specific volume elements covered by magnetic particles, and a low elastic modulus and no magnetization to the regions covered by polymer matrix. The strength of this approach is that the influence of the magnetic particle distribution in the gel can be studied [183], and that a well-defined elastic model such as neo-Hookean elasticity can be used for the polymer matrix. Due to the high computational effort involved in the finite element calculations, the system size is limited to hundreds of magnetic particles. It may also be difficult to model time-dependent effects. A further model on this scale can be found in [193].
Apart from finite element calculations, simulations resolving individual particles at a continuum level have also been performed by assembling the material out of tetrahedra with well-defined elastic properties and calculating the deformation based on the stresses applied to the vertices of the individual tetrahedra [194, 195]. A third approach is the modelling of the polymer matrix as a network of elastic springs [196]. While the polymer structure of the gel is not explicitly resolved at this level of resolution, some conclusions can be drawn, e.g. by comparing the deformation behaviour and particle displacement in a magnetic field to those observed in experiments, depending on the elasticity relations used in the simulation. By changing the boundary conditions between volume occupied by particles and volume occupied by the matrix, it is also possible to study the coupling of rotating magnetic moments to the polymers.
A first step towards resolution of the polymer structure is the representation of polymers by harmonic springs [30, 197]. In these simulations, based on molecular dynamics, Brownian dynamics, or energy minimizations, magnetic particles are explicitly modelled. The polymers are described by entropic springs added between specific pairs of magnetic particles. This approach has two main strengths. First, it allows for the study of effects of the polymer structure by varying which magnetic particles are connected by polymers [30], second, it allows for the simulation of systems with up to 10 000 magnetic particles. This makes it possible to compare samples of different shapes and magnetic particle configurations (isotropic versus uniaxial).
The most detailed study of the polymer network is possible in simulations which explicitly model the polymers as bead-spring chains [26, 28, 29, 31, 198, 199]. The magnetic particles are also explicitly included. In this way, one can, for instance, look at the coupling between magnetic particles and polymers in particle cross-linked gels. Due to the large number of degrees of freedom needed for the polymers, these simulations are limited to a few hundred magnetic particles.
It is worth noting that atomistic simulations, i.e. molecular dynamics simulations in which individual atoms or small groups of atoms are resolved, are at this point not suitable for the study of magnetic gels due to the large difference in scale between monomer units of the polymer and the magnetic particles. The volumes and time scales achievable (cubic nanometers and nanoseconds) are not sufficient for a magnetic gel. Atomistic simulations might, however, be used to study interactions between the coated surface of nanoparticles and the polymers, or for the study of the behaviour of relevant polymers themselves, e.g. in [200].
5.1.2. The role of entropy.
When studying magnetic gels, entropic effects can show up in two places and play an important role. First, entropy is always relevant for the entropic elasticity of the polymer chains. As there are less uncoiled states for a polymer chain than coiled ones, the entropy is lowered when a polymer chain is stretched. In models using bead-spring chains for the polymers, this is explicitly included, as long as the canonical thermodynamic ensemble is employed. In models that use elastic potentials or an elastic continuum to model the polymer matrix, the polymer entropy is represented by an effective potential for the free energy cost of deforming the polymer.
Entropy does not significantly influence the magnetic moment of bigger (micron-sized) magnetic particles. These particles are magnetizable, hence, their magnetic moment is co-aligned with the locally acting magnetic field. When the particles are small enough to have a permanent magnetic moment and feel the influence of Brownian motion (tens of nanometers), however, entropy becomes important. Here, the density of states is much lower, when the magnetic moment is nearly co-aligned with the external field, than when it is not aligned. This is, why the Langevin magnetization curve (figure 2) saturates only for very high values of the Zeeman energy.
For modelling purposes, a pure energy minimization technique can be used, when the polymer elasticity is included as an external potential, and the particles are either magnetizable, or have magnetic interaction energies much larger than the thermal energy. For nanoparticles with permanent magnetic moments, on the other hand, a simulation has to be performed in the canonical ensemble, e.g. by using a Monte Carlo method [201], or Langevin dynamics [202].
5.1.3. Boundary conditions, non-affine deformations and calculating dipolar interactions.
Many simulations, which aim at the study of bulk properties of materials, are performed using periodic boundary conditions. This is also true for magnetic gels [29, 203]. In this way, small system sizes, with hundreds to thousands of magnetic particles can be used, without incurring large boundary effects in the results. There are, however, two important limitations. First, when the deformation of a ferrogel in a magnetic field relies on the dipole–dipole interaction, this deformation depends on the sample shape due to the influence of the demagnetization field [24, 27, 30]. This is not covered, if the modelling relies on periodic boundary conditions. Second, periodic boundary conditions restrict the deformation of the magnetic gel to cuboid shapes. It has, however, been shown that non-affine deformations are important [183, 184]. For both reasons, systems with open boundaries may have to be simulated.
Let us briefly discuss the technical implications for using open boundary conditions in simulations. Calculating dipolar interactions for a system with open boundaries increases the computational cost considerably, as fast methods that scale as  with the number of particles N such as the dipolar P3M method [204] require periodic boundaries. For systems with open boundaries, two approaches are possible. Either, one calculates the dipolar interactions by means of direct summation, i.e. by considering all pairs of particles. This scales as N2 in the number of particles, and for systems with more than hundreds of particles is currently only viable on graphics processors [30]. The alternative is a recently developed method termed P2NFFT, that can be employed in open boundaries [205]. This method makes use of the Ewald splitting as in the P3M method, combined with a regularization at the boundaries. It scales as
with the number of particles N such as the dipolar P3M method [204] require periodic boundaries. For systems with open boundaries, two approaches are possible. Either, one calculates the dipolar interactions by means of direct summation, i.e. by considering all pairs of particles. This scales as N2 in the number of particles, and for systems with more than hundreds of particles is currently only viable on graphics processors [30]. The alternative is a recently developed method termed P2NFFT, that can be employed in open boundaries [205]. This method makes use of the Ewald splitting as in the P3M method, combined with a regularization at the boundaries. It scales as  , albeit with a high prefactor. Therefore, it is only faster than the direct summation for systems with more than several thousand dipolar particles.
, albeit with a high prefactor. Therefore, it is only faster than the direct summation for systems with more than several thousand dipolar particles.
With these basic considerations in mind, let us now turn to simulation models for magnetic gels on the different levels of description discussed above.
5.2. Continuum and quasi-continuum modeling
Continuum models make an important contribution to the study of magnetic gels, as they allow one to apply well-defined elastic properties to the polymer matrix, whereas these typically are an outcome in more microscopically models. The fact that the polymer matrix is treated as an elastic continuum, however, implies that details of the polymer architecture can typically not be covered. One can, however, test some assumptions about local properties of the matrix by comparing simulation results for different sets of elastic properties. This has been done in [196], where different assumptions about the immediate surrounding of particles embedded into the matrix are compared. The paper discusses experiments on an initially straight chain of magnetic particles embedded into a soft magnetic gel. When a field is applied perpendicular to the chain, it cannot re-align due to the elasticity of the surrounding matrix. For weak fields, the chain only bends with its ends parallel to the field to make the dipolar interactions within the chain more favorable. When the external field is stronger, the chain buckles into a wave-like shape. The experimental results are complemented by a theoretical model and a simulation model, both of which can describe the buckling effect. The simulations are somewhat in-between a dipole-spring model, as discussed in the next section, and a continuum model. Rather than connecting pairs of magnetic particles by entropic springs, here the entire gel is made up from a dense triangular network of springs. An elastic matrix is created by placing distance-dependent potentials on the springs forming the edges of the network, and angle-dependent ones on the nodes. Within the volume occupied by the magnetic particles, the matrix is rigid and follows the particles' rotation and translation. This implies that the polymer matrix does not slide on the surface of the magnetic particles. Based on this model, the effect of the elasticity of the matrix in the immediate surrounding of the particles was examined. Applying the elasticity of the bulk matrix, one cannot explain the experimentally observed buckling effect. Instead, the chain decays into several columns of particles aligned parallel to the field. When a much higher stiffness is applied in the immediate surrounding of the particles, on the other hand, the simulations reproduce the wave-like buckling of the chain. This indicates that the embedding of the particles modifies the matrix in the particles' immediate surrounding, such that the chain cannot break apart.
In [183] a continuum model based on the finite elements method is used to study the influence of the local particle distribution in the matrix on a gel's deformation. Theories which model the gel as a homogeneous magnetoelastic continuum obtain an elongation parallel to the field as a result of a lowering of the demagnetization energy. However, the local distribution of particles can modify this result. The simulation model resolves particles individually. This is done by applying a much higher elastic modulus to the regions of the sample occupied by them. Particles are randomly distributed in the system. Then, the deformation of the gel is compared to the full system, that is a system in which only single particles are kept, and one in which only particles are kept that are part of clusters. The comparison shows that single particles support a contraction of the gel parallel to the field, as these particles attract each other. Clusters of particles, on the other hand, tend to support an elongation parallel to the field, because they rotate such that the local dipolar interactions are optimized. This finding implies that non-affine deformations play an important role in describing the deformation of magnetic gels. This is also supported by [184], which makes use of a dipole-spring model. The importance of non-affine deformations also relates to the question of the freedom of motion, which is left to magnetic particles in a gel. The model in [183] provides a clear explanation for contradictory predictions about the deformation of magnetic gels in a field. By using linearly magnetizable particles and linear elasticity, the model most closely applies to magnetic elastomers loaded with micron-sized magnetizable particles, and is limited to small deformations. It is, however, very likely that the findings are valid also for magnetic gels loaded with single-domain particles.
The response of magnetic gels to very high strains is studied in [195]. The model treats the polymer matrix as an elastic continuum. It is built up from tetrahedral volume elements which deform under stress based on a Neo-Hookean elasticity law. In this way, the model takes into account the finite compressibility and stretchability of the polymer material. The magnetic particles are treated as completely rigid. Both, the case of the polymers rigidly attached to the particles surface, and a sliding contact can be covered. The article reports on superelastic behaviour of magnetic gels. The basis is a uniaxial gel sample with co-aligned chains. When a load is exerted parallel to these chains, the elastic modulus is initially very high, since the magnetic attraction between the particles has to be overcome when stretching the gel. At some point, however, the external load overcomes this attraction and the chains come apart. Then, the elastic modulus is much lower, as it is controlled by the soft polymer matrix. If the magnetic moment rotation is not directly coupled to the surrounding matrix, a further change can occur. This happens when the distance between particles perpendicular to the external strain becomes closer than the one parallel to it. Then, the magnetic moments flip and chains are formed in the perpendicular direction. It is shown that this is largely suppressed, when the surrounding matrix has to follow the rotation of the magnetic moment. Then, a moments rotation costs a lot of energy to deform the surrounding matrix. This work is one of very few employing a non-linear stress–strain relation, making it applicable for large deformations.
5.3. Modelling polymers as entropic springs
Some simulation models have been proposed which make use of entropic springs between the particles to model the elasticity of the polymer matrix (see figure 9 for an example). As opposed to continuum models, they can capture some details of the polymer structure of the gel. Compared to models explicitly resolving the polymers, their main advantage is the lower computational cost. This allows for simulating bigger systems and longer time scales.

Figure 9. Snapshot of a gel model which describes the polymers as entropic springs between the magnetic particles. A smaller system than that used for production simulations is shown, to improve visibility. Reproduced with permission from [30].
Download figure:
Standard image High-resolution imageReference [197] is focussed on calculating the static and dynamic elasticity of magnetic gels. Both, particle distributions based on a regular lattice, and those based on randomly disturbed lattices are considered. Entropic springs connect particles considered as nearest neighbors in the underlying regular lattice. Furthermore, the particles interact via soft sphere and dipolar interactions. From the eigenmodes of the network and an overdamped equation of motion, the frequency dependent bulk and shear moduli are obtained. The authors show that the elastic moduli tend to increase with the strength of the magnetic moments. This is attributed to the formation of chains of magnetic particles, when their dipolar interaction becomes strong enough. Then, the elasticity is not so much controlled by the elasticity of the polymer matrix described by the entropic springs. Instead, the steric repulsion between magnetic particles represented by a soft sphere potential dominates. This effect was also described in an earlier one-dimensional dipole-spring model [52], and in highly strained systems based on a continuum model [195].
In [30], a model using entropic springs is used to study how different cross-linking architectures influence the freedom of motion of the magnetic particles, and to what degree the particle microstructure is retained after cross-linking. The model is constructed as follows. First, a magnetic particle configuration is taken from a simulation of a regular ferrofluid. This can be done without an external field applied to obtain an spatially isotropic distribution of the particles, or with a strong external magnetic field to obtain a uniaxial one. Then, the desired gel shape is cut, e.g. a sphere. The cross-linking occurs by considering all pairs of particles and based on a probability function, entropic springs are added between some of the pairs. By changing this probability function, one can influence, whether the polymers bind mostly adjacent particles or also particles further apart from each other. The stiffness of the polymers is taken to decrease with their equilibrium length, as far apart particles tend to be connected by longer polymers, which can be deformed more easily. The way in which the gel is cross-linked influences the freedom of motion that the particles retain after cross-linking. A measure is proposed which characterizes, whether the particle microstructure of the gel is isotropic or uniaxial. It is based on the fact that clusters of magnetic particles are often chain-like due to the prevalence of the head-to-tail configuration. The measure is therefore based on a cluster analysis of the magnetic particles. For each cluster, the longest axis is identified. By using a nematic order parameter, one can measure, how many clusters' long axes are co-aligned to each other. The more of them are, the more uniaxial is the gel. By calculating this measure for a gel with an isotropic structure which is placed in an external field or for a uniaxial gel in the absence of a field, one can observe, to what degree the respective microstructure is retained. The results from [30] indicate that the microstructure is more stable and the particles have less freedom of motion, when mostly closely adjacent particles are connected.
5.4. Explicitly modelling the polymers
While resulting in a high computational effort, explicitly modelling the polymers as bead-spring chains lets one study the influence of the polymer-nanoparticle coupling, as well as the polymer–polymer interactions. Also, such simulations can be used to generate inputs for simulations on larger length scales.
Simulation models on this scale have been developed for both deformation mechanisms pertaining to homogeneous external fields discussed in section 1.1 [26, 28, 29, 31]. Model I in [26, 28] refers to a gel deforming due to the change of average dipole–dipole interactions between the particles, when their magnetic moments are aligned to an external field. The two-dimensional model consists of flexible polymer chains connected in four-fold cross-links at their ends. Magnetic moments are introduced, by assigning part of the beads in the polymer chains a dipole moment. As there is no direct coupling of the dipole moments' orientation to the polymer chains, this describes a situation, where magnetic particles are loosely connected to the polymer chains, e.g. by hydrogen bonds or van der Waals interactions, or a case in which the magnetic moments of the particles relax internally via the Néel mechanism. Placed into an external magnetic field, the gel elongates parallel to the field direction and contracts in the perpendicular direction. An analysis of two-dimensional correlation maps for the relative position of the particles shows that this is caused by a bending of chains of magnetic particles into the field direction. While only four-fold cross-links were considered, it was shown that the results remain qualitatively similar for polydisperse polymer chains. Snapshots of such a gel and its deformation in a field can be seen in figure 10. In a polydisperse network, the nodes of the network are much less regularly placed. This indicates a certain robustness of the deformation mechanism against details of the polymer architecture. This is consistent with continuum theory results [24], which do not include details of the polymer architecture, and also with experimental results showing a similar deformation for a thermoreversible gel based on triblock co-polymers [3] and in a polymersome loaded with magnetic particles [206].
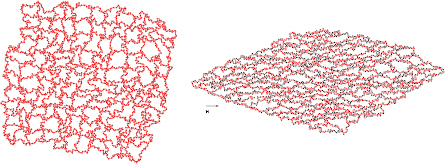
Figure 10. Sample of a magnetic gel model [26] with polymer chains treated as bead-spring chains. The polymers are polydisperse, i.e. their length is randomized. Samples are shown without (left) and with (right) a magnetic field applied. Like the more regular model in [26], the gel elongates parallel to the field and shrinks in the perpendicular direction. Reproduced from [26] with permission of The Royal Society of Chemistry.
Download figure:
Standard image High-resolution imageA model for a microgel loaded with magnetic particles based on a less regular polymer network structure than the ones discussed above can be found in [199]. It is constructed by equilibrating a number of polymers described as bead-spring chains in a spherical shell. The polymers are then cross-linked, by adding bonds between adjacent pairs of particles belonging to different polymers. Lastly, a randomly selected subset of the beads in the polymers are given a magnetic moment. The authors use the model to study the swelling of the gel depending on the degree of cross-linking and the fraction of magnetic particles. They report a lower swelling for a higher magnetic particle content and higher degree of cross-linking. Furthermore, if the magnetic interactions are strong enough, the magnetic particles can form ring-like clusters. These clusters lower the magnetic susceptibility of the system, since aligning the magnetic moments parallel to a field will lead to a loss of dipolar interaction energy when the ring structure is broken. A somewhat related drop of initial susceptibility arising from an interplay between the elastic constraints in the gel and dipole–dipole interactions is described in [30].
Simulation models have also been developed for ferrogels in which the orientation of the magnetic moments is directly coupled to the polymers. In [31], this was done by constructing a two-dimensional network of polymers in the bead-spring framework. Magnetically blocked particles were introduced by applying the magnetic torque they feel to some of the bonds in the network. The model shows auxetic behaviour, i.e. it has a negative Poisson ratio and expands in both directions, parallel and perpendicular to an applied strain. Model II in [26, 28] takes the different length scales of the magnetic particles and the polymers' persistence length into account. The two-dimensional model consists of magnetic particles onto whose surface bead-spring polymers are anchored such that the end beads of the polymer chains co-move with the surface they are connected to. The diameter of the beads forming the polymer chains, which is associated with the polymers' persistence length, is one tenth the diameter of the magnetic particles. This model takes into account the interaction of the magnetic particles with the field, but not the dipole–dipole interaction between different particles. Model II in [26] focuses on two aspects, namely the deformation of the gel in a homogeneous field, and its magnetic response. In a field, the magnetically blocked particles rotate to co-align their magnetic moments to the field. This leads to a wrapping of the polymer chains around them. Thereby, a stress is exerted on the polymers, which in turn, leads to a shrinkage of the gel as a whole. A sketch of this mechanism can be found in figure 11. The direct coupling of the orientation of the magnetic moment to the polymers also influences the gel's magnetic response. As the polymers connected to a magnetic particle are strained, when the particle rotates to align its moment to the field, the polymers create a restoring torque. This has to be overcome to magnetize the gel. As a result, the magnetization curve of the material falls below the Langevin result for non-interacting dipoles (equation (6)).

Figure 11. Sketch of a magnetic nanoparticle acting as cross-linker in a ferrogel. Left: field free case, right: in a strong external field that points to the right. In order to achieve an orientational coupling between the nanoparticle and the polymer chains, the chains are attached to specific spots on the surface of the magnetic particle. Once the magnetic particle is aligned by a magnetic field, the polymer chains have to follow and are wrapped around it. This strain on the polymers leads to a shrinking of the model gel. Reprinted from [28], Copyright 2015, with permission from Elsevier.
Download figure:
Standard image High-resolution imageA three-dimensional extension of the model is discussed in [28, 29]. Here, two different architectures are compared. In the one case, four polymers are connected to a magnetic particle, in the other case six ones. As monodisperse polymers are considered, this corresponds to an initial placement of the magnetic particles on a diamond cubic and simple cubic lattice, respectively. The most notable difference to the two-dimensional model discussed above is that in three dimensions, the deformation in an external magnetic field is non-isotropic. In the 2D case, all magnetic moments align to the external field by a rotation around a single rotation axis, namely, the one perpendicular to the model plane. In three dimensions (figure 12), on the other hand, there are infinitely many possible axes. As explained above, all polymers attached to a rotated magnetic particles create a restoring torque. However, due to the interaction of an aligned magnetic moment with the field, a rotation around the axes perpendicular to the field are hindered, as such a rotation would break the magnetic moment's alignment. A rotation around the field axis is, however, still possible. Hence, stresses occurring in the plane perpendicular to the field direction can be partially removed by a rotation of the magnetic particle around the field direction. Consequently, a magnetic field creates a lower stress in the plane perpendicular to its direction, than parallel to it. The gel shrinks more in the field direction, than perpendicular to it. This is illustrated in figure 12.

Figure 12. Sketch of a magnetic nanoparticle acting as cross-linker in a three-dimensional gel. To align to the field, the particle rotates around an axis perpendicular to both, the external field and the direction of the dipole moment prior to alignment. Chains attached in the plane of this rotation, which includes the direction parallel to the field, are affected most by this rotation. Chains attached parallel to the rotation axis, on the other hand, are not affected. As the rotation axis is always perpendicular to the external field, there is less contraction perpendicular to the field than parallel to it. Reproduced from [28], Copyright 2015, with permission from Elsevier.
Download figure:
Standard image High-resolution imageThe elasticity of the model gel was studied, by measuring the stress on the system at various strains, and fitting the results to a linear stress–strain model. The elastic constants differ considerably for the four-fold and six-fold cross-linked architectures. First, for the gel based on six-fold cross-linking, a significantly higher bulk modulus was found, which is attributed to a larger polymer content in the system. Second, the Poisson ratios for the four-fold and six-fold cross-linked gels differ by a factor of roughly two. The mechanism by which the degree of cross-linking influences the Poisson ratio is not clear. In both cases, the gel is neither volume conserving under strain (Poisson ratio of 0.5) nor does it show auxetic behaviour as in [31] (negative Poisson ratio). The influence of the degree of cross-linking in particle cross-linked gels is hard to predict. On the one hand, additional polymers contribute to the deformation mechanism, on the other hand, they also increase the stiffness of the material which counteracts the deformation in a field. Since the deformation of the model gel is non-isotropic, the Poisson ratio changes the shape of the deformed gel. For the four-fold cross-linked gel, a stronger shrinkage is observed parallel to the field than for the six-fold one. However, the Poisson ratio is higher than for the six-fold one. The strong compression parallel to the field then hinders the compression in the perpendicular direction.
To provide inputs for less computationally expensive methods on larger length scales, an effort has been made to obtain effective potentials for the polymers in gels in which the magnetic particles act as cross-linkers [29, 198]. The effective potential was obtained by explicitly simulating two magnetic nanoparticles connected by a polymer chain described in the bead-spring framework. The ends of the polymer were connected rigidly to the surface of the magnetic particles, so that the ends of the chain follow a rotation and motion of the magnetic particles. Integrating out the polymeric degrees of freedom, the system is described by four parameters: the distance between the particles, the orientations of the dipole moments with respect to the vector connecting the particles' centers, and lastly, a torsional angle. From the explicit simulation, the probability distribution for combinations of those parameters was sampled into a four-dimensional histogram. Based on 1011 samples, an effective potential was obtained using Boltzmann inversion. A first insight can be obtained by examining the correlations between the individual parameters. Most notably, there is a strong anti-correlation between the distance of the two magnetic particles and their orientation. The more the particles are rotated out of their equilibrium orientation, the closer they are. This is due to the wrapping of the rigidly anchored polymer chain around the particles and its consequent effective shortening, when the particles are rotated. This underpins the shrinkage mechanism for particle cross-linked gels discussed above.
Based on a Boltzmann inversion of the probability distribution for the system's state obtained by simulations, in a first step, single variable potentials are obtained. In a second step, cross-terms are introduced such that the most important correlations from the original data are included. The potential is a pair-potential and neglects collective effects in the gel. It does, however, capture the deformation mechanism observed in simulations of full particle cross-linked gels. Dipolar interactions between magnetic particles are not a prerequisite for the shrinkage of particle cross-linked gels. Their influence under certain assumptions was, however, studied based on the fitted potentials. For the two-particle case considered in the paper, it was shown that the average distance between the particles is reduced, and rotational fluctuations become narrower, due to a shift in probabilities towards configurations with more favorable dipole–dipole interactions between the particles.
The simulations discussed so far rely on information about the polymer structure of the gel as an input. Also, many models make use of more regular architectures than one would expect in experiments. One possible way to change this is to model the cross-linking process itself. An effort to do this is underway [207] for particle cross-linked gels. While the simulations are obstructed by a high computational effort to reproduce the high randomness of the system, we provide a first outlook here. The simulations start out with a suspension of 100 magnetic nanoparticles as well as 600 polymer chains described as bead-spring models with 60 beads each. The size ratio between the magnetic particles and the polymer beads is ten to one. The simulations are carried out in the canonical ensemble, taking into account the random motion of the polymers. Every time an end of a polymer collides with the surface of a magnetic particle, a covalent bond is formed, fixing the end of the polymer chain to the specific spot on the surface of the nanoparticle. These simulations help to get an idea of how factors like magnetic particle density and polymer polydispersity influence the resulting network architecture. For instance, one can study the likelihood of loops to occur. Loops are polymers where both ends are connected to one and the same magnetic particle. They do contribute to the stiffness of the gel but not to its field-driven deformation. Hence, for actuation applications, it might be necessary to prevent their formation as much as possible. In figure 13 at the top, we show an image of a gel network obtained by cross-linking at a low magnetic particle concentration. Only edges, i.e. polymers connecting two different magnetic particles, are shown. In the bottom part of figure 13, we show a plot of the loop-to-edge ratio versus the volume fraction. Also, we compare results for monodisperse and polydisperse polymers, where the average length of the polydisperse chains also is 60 beads, and the variance in length is 30 beads. It can be seen that loops are much more prevalent at lower magnetic particle concentrations. Then, the average distance between the magnetic particles is much higher. Once one end of a polymer chain is connected to a magnetic particle, it is therefore much more likely that the other end connects to the same particle, than for the polymer to stretch enough so that the second end can connect to a different particle. The formation of loops is also more likely for polydisperse polymers, as then, part of the polymers are simply too short to span the distance between two neighboring magnetic particles without spending a huge cost in entropy. In the long run, the elasticity and field-driven deformation of gels obtained by modeling the cross-linking process may be studied, to better understand the influence of parameters of the cross-linking process and the resulting network structure on the macroscopic properties of the gels as they are relevant for applications.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Figure 13. Top: snapshot obtained of a particle cross-linked gel model created by modelling the cross-linking process. For visibility, only those polymers are shown, which link two magnetic particles (edges). Loops, i.e. polymers with both ends connected to the same particle are omitted. Bottom: plot of the ratio of loops to edges versus the volume fraction of magnetic particles. When the volume fraction is lower, more loops are formed. Also, polydisperse polymers form more loops than monodisperse ones.
Download figure:
Standard image High-resolution image{kind=link}
6. Conclusion
Magnetic gels show a coupling between magnetic and elastic properties that allows one to control their properties by external stimuli, in particular, magnetic fields. Ferrogels have therefore a great potential to be used in medical applications such as actuation and controlled drug release since biological tissue is tolerant and penetrable to magnetic fields. In this article, we provide an introduction to properties of the materials, and review the current stage of experimental, theoretical and simulational approaches. We have focused particularly on the polymer architecture of the gels.
Gels can be produced in a variety of different architectures by following various synthesis protocols. This includes magnetic particle filled networks based on both, physically and chemically cross-linked gels, as well as networks in which the magnetic particles act as cross-linkers. While in the first case, the magnetic particles' rotation is not directly coupled to the network, such a coupling may exist in the latter case.
Knowledge about the synthesis process and the used materials already provides some information about the architecture of the gels. However, characterizing the materials is vital in understanding both, their microscopic and macroscopic properties, and to this end, a variety of experimental characterization techniques is available. Methods like magnetic particle nanorheology and Mössbauer spectroscopy that can measure particle-matrix interactions, are of particular importance since here precise knowledge is still lacking. These methods show the best potential for clarifying how the magnetic particles are incorporated into the polymeric matrix, and for uncovering the degree to which particles are able to move and re-arrange within the network. This information is highly relevant for developing good theoretical descriptions and simulation models, because the presence and stability of magnetic particle clusters influences the field-controlled deformation of the ferrogels. Another technique currently emerging is small angle polarized neutron scattering (SANSPOL). This method allows one to detect simultaneously magnetic and structural properties of ferrogels.
The choice of which synthesis pathway to follow and which gel architecture to use depends strongly on the research question, as well as on the desired physical and chemical properties of the material. A promising perspective for future works from the synthesis point of view is the preparation of ferrogels with additional features and properties. For example, ferrogels can be synthesized that are sensitive to heat or light.
A further area of interest is to gain more experimental control over the gel architecture, e.g. the monodispersity of the polymer meshes, and the further development of suitable characterization methods to elucidate in more detail the polymer architecture present in ferrogels. The use of ideally homogeneous network structures with defined polymer meshes is important for understanding the influence of individual aspects of the architecture on the resulting properties of the ferrogel. Well-defined tetra-arm star shaped polymers [208, 209] are good candidates for this purpose, since they can be produced in a broad range of molar mass and with a variety of functional end groups to form either covalent or supramolecular bonds between the polymers. The precise knowledge of the polymer architecture will also facilitate the development of theories and simulations more closely linked to the experimental systems.
When developing theories and simulation models for magnetic gels, it is important to consider the relevant length scales, for example, the relative size of the magnetic particles compared to the microscopic features of the polymer matrix. Magnetic nanoparticles may well interact with the local polymer structure. This is especially the case for gels in which the particles act as cross-linkers. Since particle size and details of the polymer architecture are at the same length scale this also implies that changing the polymer architecture may yield particle mobilities with different degrees of freedom. This could occur independently of the global elastic moduli of the materials. When the magnetic particles are micron-sized, a different picture emerges. Then, the particles will in many cases be larger than the mesh sizes of the polymer matrix. Hence, mainly the elastic properties of the matrix, viewed in a continuum description, will determine the freedom of motion of the magnetic particles. A further difference between single domain nanoparticles and magnetizable micron-sized particles is the possibility for a coupling of the particles' rotation to the matrix. Nanoparticles can be magnetically blocked, so that a rotation of the magnetic moment implies a rotation of the particle (Brownian mechanism). This rotation can then be directly transferred to the polymers. Magnetizable particles can re-align their magnetic moments by an internal re-magnetization caused by a restructuring of the magnetic domains. A rotation of the particles as a whole will most likely only occur, when they are not spherical. In that case, the demagnetization energy will favor certain alignments of the particles with respect to the field.
Many questions pertaining to magnetic gels have been investigated by simulational and theoretical studies. Most of them have concentrated so far on the spatial particle distribution in the gels, whereas the influence of the polymer architecture was not explicitly considered. Still, these studies play an important role in understanding the mechanisms for the deformation of ferrogels in external fields as well as field-dependent elastic properties. A lot can be learned about these issues without considering details of the polymer architecture. For instance, theoretical models have shown the strong influence that the particle distribution can have. Also, matrix-mediated forces and torques acting between magnetic particles can be calculated and verified against experiments. Continuum descriptions are able to explain many magnetodeformational effects. A key challenge for both, theory and simulations, is to capture details of the polymer architecture due to its high degree of randomness. A further challenge, in particular for theoretical work is the fact that—unlike in a fluid—particles are no longer interchangeable.
Simulations which model the gel matrix at least as entropic springs, if not as explicit bead-spring chains, are needed to directly study the influence of the polymer architecture. The high degree of randomness in realistic polymer systems can only be captured by large enough systems. Both factors lead to a high computational effort. Nevertheless, some studies have been undertaken for particle cross-linked gels [29], where a dependence of elastic properties on the degree of cross-linking was found. For another model, auxetic properties of the gels were reported [31]. To our understanding, there is not yet a clear picture of how the network architecture and particle-matrix coupling influences the elastic properties of the system which clearly needs further work. Another study [30] examines the influence of the cross-linking architecture, comparing the freedom of motions that magnetic particles show as function of their connectivity. The degree of mobility of the mag-netic particles is important, because, according to simulations, they significantly influence the field-dependent deformation. In nearly all simulations that resolve the polymer architecture explicitly, this architecture is an input. Furthermore, it is close to impossible to match this input to a specific experimental system. An approach to mitigate this is to simulate the cross-linking process of the gel, and then characterize the resulting system. This may clarify the influence of factors such as polymer polydispersity and magnetic particle density on the field-dependent deformation and elastic properties of the gel.
Many simulational studies deal with particle cross-linked gels. This is partly, because currently they are in the focus of many experimental works, but also, because in those systems, there is more clarity about the particle-polymer coupling compared to other ferrogels. Gels in which magnetic particles are only held by an osmotic pressure, or where they are included in pores of the polymer matrix have, to our knowledge, not been studied extensively in simulations so far. This should, however, be done in the future since such gels are very widely investigated, experimentally. Here, atomistic simulations can help to elucidate the nature of the interactions between the particles and the polymers, e.g. identifying binding sites and mechanisms [165]. Interestingly, experiments found significant qualitative differences in the rheology of such gels compared to ones in which the magnetic particles act as cross-linkers [89].
An important open research question is the role that different kinds of coupling between magnetic particles and the polymers have on dynamic properties of magnetic gels. This coupling can be due to excluded volume, van der Waals forces, covalent bonds, and hydrodynamic forces. In simulations, these different coupling mechanisms can be switched on and off individually. Simulations therefore have the potential to identify the 'signatures' of those couplings in magnetic susceptibility spectra or frequency dependent rheology measurements. Challenges that need to be overcome are the slow relaxation of polymers and the long-range nature of hydrodynamic interactions, but some simulations in this respect are on the way.
So far simulations have focused to develop models for different experimentally realized architectures, and to understand the basic observed trends. For example, both, simulations and theoretical calculations can reproduce qualitatively the deformation of a gel in a homogeneous magnetic field which is based on lowering of the demagnetization energy. The field-induced deformation of particle cross-linked gels predicted by simulations is hard to observe experimentally, because it requires short polymers and a low elastic modulus at the same time. Also, theory and simulation describe mechanisms for the experimentally observed increase of elastic moduli in an externally applied field. For elastomers loaded with micron-sized particles, particle distributions obtained from x-ray micro-tomography measurements can be used in simulations [210]. For ferrogels loaded with nanoparticles, full particle distributions are, so far, not available. Hence, different simulation models are based on different assumptions. There are two factors that often prevent a more direct comparison between experiments and simulations: first, simulation models tend to have much more regularity than experimental systems and are significantly smaller. Second, in many cases, the nature of the network structure and the particle-matrix interactions in experimental systems is not known in sufficient detail to arrive at a unique mapping to a simulation model. It is therefore expected that quantitative agreement will be reached first for continuum models on the micrometer length scale. One case, where a direct and quantitative comparison between experiments and theory was reported is [188], in which predictions of matrix-mediated interactions between magnetizable particles could be verified experimentally. Achieving a high degree of predictivity for models capturing polymeric details will be more difficult.
Finally, let us turn to the role that the polymer architecture plays in applications such as actuation and drug delivery and release. Simulation models, theoretical considerations, and experimental results as well indicate that for actuations based on an external magnetic gradient field, and for deformations that are due to the change of the average dipolar interactions in a homogeneous field, little requirements are placed on the polymer architecture. The deformation of a gel in a homogeneous field might still be stronger for polymer architectures which give the particles some freedom of motion. This is due to a collective realignment of chain-like clusters of magnetic particles into the field direction. Moreover, the possibility for magnetic particles to form chains results in a higher magnetic susceptibility. Deformation based on a coupling of the rotation of magnetic moments to the polymers almost certainly will only be significant for those architectures where the magnetic particles are cross-linkers of the gel. In that case, details of the architecture may very well significantly influence the response of the gel to an external field. Relevant factors can be the degree of cross-linking, the number of polymers attached to magnetic particles, and the relative prevalence of chains connecting different magnetic particles as opposed to loops.
For drug delivery and release, magnetic gels are particularly interesting, because they allow to isolate the drug molecules from the environment during transport. The two main requirements that the used polymer system has to fulfill are biocompatibility and the ability to hold the drug until it is released. The transport of the gel to the target area will typically be achieved by a field gradient. This puts little restrictions on the polymer architecture. For a release mechanism based on the heating of the gel in an AC field, the polymer needs to show a temperature sensitivity, such that the diffusivity of the drug molecules is significantly enhanced in a temperature range compatible with biological tolerances.
In summary, the combination of experimental, theoretical and simulational work has provided significant understanding with regards to magnetic gels and its interdependence with the polymer architecture. Some examples are magneto-deformational effects, controlling elastic properties by external fields, and the influence of the particle distribution in the gel. Ferrogels have been synthesized based on a wide range of polymer architectures. With techniques such as nanorheology and Mössbauer spectroscopy, powerful experimental tools have become available to probe the materials' architecture and the particle-polymer coupling. Also, simulation models describing the polymers as entropic springs or as bead-spring chains have been applied to study the influence of the polymer architecture. Here, the degree to which particles can move in the matrix as a function of the cross-linking has been studied. Additionally, elastic properties in particle cross-linked gels have been investigated. Many questions with regards to the polymer architecture are, however, still open, not only from the theory and simulational side, but also from the experimental point of view. Therefore, future research should aim at gaining a good understanding of the way in which the polymer architecture controls macroscopic properties of the ferrogels. It will also be important to further study the particle-matrix coupling, and to reveal the mobile degrees of freedom of the magnetic particles that can depend on the gels' architecture, particularly for time-dependent external stimuli.
Acknowledgments
The authors are grateful for financial support from the German Science Foundation (DFG) through the priority program SPP 1681 through the grants HO 1108/23-2 and SCH 1747/10-2. M H acknowledges support by the International Helmholtz Research School of Biophysics and Soft Matter (IHRS BioSoft). In addition, R W and C H acknowledge funding through the cluster of excellence EXC 310, SimTech, and access to the computer facilities of the HLRS and BW- Unicluster.