Applicability of Shape Memory Alloys in Aircraft Interiors

Chair of Production Systems, Ruhr-University of Bochum, Universitaetsstrasse 150, 44801 Bochum, Germany
*
Author to whom correspondence should be addressed.
Actuators 2019, 8(3), 61; https://doi.org/10.3390/act8030061
Submission received: 10 July 2019
/
Revised: 1 August 2019
/
Accepted: 5 August 2019
/
Published: 9 August 2019
(This article belongs to the Special Issue Actuators Based on Shape Memory Alloys)
Abstract
:This paper evaluates possible applications for SMAs (Shape Memory Alloys) based on the requirements in the field of aircraft interiors. The authors gather requirements regarding industry standards and regulations by detailed literature research and lead user interviews. They develop a classification scheme for SMA-based actuators, which consists of SMA-specific technical attributes and requirements. This classification scheme allows one to evaluate the feasibility of using SMA-based systems in aircraft interiors. Furthermore, this paper clusters critical requirements and discusses solutions for limitations of SMAs in aircraft interiors. The authors identify critical and noncritical requirements for the implementation of SMA-based actuators. They suggest solutions for critical requirements in order to improve the possible range of applications for SMAs. The study exclusively regards the field of aircraft interiors and the currently existing industry standards and only indirectly takes laws into account. The evaluated requirements and proposed solutions can be transferred to other areas such as the automotive industry. This structured analysis of the feasibility of SMA-based systems in aircraft interiors is an innovative research work and, therefore, is valuable in order to benefit from the advantageous properties of SMAs.
1. Introduction
Economic, environmental, and regulatory aspects of aircraft operation are becoming increasingly important. According to the German Bundesverband der deutschen Luftverkehrswirtschaft e.V. [1], the reduction of fuel consumption is a main objective in (German) aviation. In this context, the weight reduction is a central lever, which also influences the CO2 and NOx pollution. A saving of 1 kg weight on all aircrafts operated by Lufthansa saves 30 tons of kerosene annually [2]. The costs for kerosene amount to one third of the operating costs of an airline [1]. Moreover, 1 kg kerosene emits 3.5 kg CO2 and between 6–16 g NOx [3].
Promising approaches to reduce emission are economical engines, alternative fuels and weight-saving materials [4]. In terms of weight-saving materials and lightweight construction for interiors and exteriors, shape memory alloys (SMAs) are very advantageous. They have a high energy density and are very power efficient. In comparison to conventional actuator systems, SMA-based actuators can reduce weight. There are already established applications for SMAs in aircraft industry that prove that SMA-based systems can fulfill the high certification standards in said field. However, the potential of SMAs in aircraft interiors is nearly unused. For this reason, it is necessary to thoroughly analyze the requirements in aircraft interiors with regard to possible applications of SMAs. Moreover, it is advisable to identify solutions for the limitations of SMAs in order to enhance the range of possible applications.
2. Shape Memory Alloys
2.1. Basics of Shape Memory Alloys
Shape memory alloys belong to the group of active materials with direct coupling for actuation [5]. After being deformed, SMAs have the ability to remember their previously imprinted shape. The shape memory effect (SME) can be distinguished into a mechanically triggered (pseudoelastic) and thermally triggered effect. In the first case, the material retains its shape immediately after being unloaded [6]. In the second case, the material retains its shape by supplying energy. This is possible by using the ambient temperature or resistance-based heating as part of electrical activation. The SME bases on the phase transformation from martensite, the low temperature phase, into austenite, the high temperature phase, which exhibits a temperature hysteresis due to inner friction [7].
Their high energy density, high displacement and forces, high corrosion resistance, and good biocompatibility [5,8,9] are advantageous properties of SMAs. Table 1 sums up the technical characteristics of common NiTi-SMA for industrial actuator applications. Besides this, SMAs have a high potential for miniaturization, have no abrasion of material, are electromagnetically compatible, and are known for their simplicity, lightweight and noiselessness [10]. Furthermore, SMAs have the self-sensing effect, which is useful for control purposes [5,11,12].
The actuator lifetime is particularly critical, since it limits the usability of shape memory actuators in applications requiring many thousands of activation cycles. The lifetime of shape memory elements is determined not only by classical material characteristics, but also by changes in the microstructure caused by repeated phase transformations that influence the actuators’ behavior. Cyclic mechanical loading of the material leads to classical material fatigue due to crack formation and growth, also known as structural fatigue [18]. However, cyclic repetition of the martensitic phase transformation also leads to changes in the functional properties of the SMA, the so-called functional fatigue [19]. Long before the SMA component fails due to instability or breakage, the technically relevant characteristics of the SMA change, whereby the function of the SMA component can no longer be fulfilled. The factors influencing functional fatigue are numerous, e.g., alloy composition, heat treatment, actuating stroke or elongation [19]. The running-in effect within the first 100 cycles of the shape memory effect [20,21] is another phenomenon that influences the lifetime of SMA elements. This severe degradation of actuator characteristics such as actuating force and stroke makes it particularly difficult to predict the behavior of the actuator. It may require some kind of shakedown to improve functional lifetime of the actuator and ensure its reliable functionality [22].
2.2. Applications of SMA-Based Actuator Systems in Aircraft Engineering
Because this paper focusses on fixed-wing aircrafts, it regards only those applications of SMAs. However, SMAs are successfully used in rotorcrafts, for example to twist rotor blades [5,23]. It is also used in spacecrafts for the actuation of solar panels [24], e.g., on the mars robot “Pathfinder” [25], or for low shock release mechanisms of satellites [5,26].
The first commercial application of SMAs was the CryoFit coupling, used in the Grumman F-14 Tomcat in 1971 [5,27,28]. Other common applications of SMAs are latching and fastening devices, as well as locking and releasing devices [15]. There are also attempts to realize retractable landing gears with SMA-structures [8].
The properties of shape memory alloys make them attractive for the aircraft industry in order to realize adaptive structures [15]. There are different projects, trying to develop adjustable airfoils to decrease turbulent drag [5,29,30,31,32,33]. Another usage for adaptive SMA-structures are chevrons, which are adjustable flaps at the outlet of an aircraft turbine. BOEING developed those chevrons using SMA-beams to reduce the noise level during take-off and landing [5,32]. It is also attractive to use SMAs to create elements with variable stiffness, not only for dampening, but also for increasing medium flow [5]. Established applications in aircraft interiors are the trigger of the oxygen masks [34] and various locking and release mechanisms [35,36].
3. Requirements for SMA-Based Actuator Systems in Aircraft Interiors
In order to gain customer requirements, Ahrens [37] recommends lead user interviews. The authors have performed a lead user interview with a supplier of aircraft components. For potential substitutions of common electromechanical actuators, the producer of those actuators provides the best knowledge of their requirements. The interview includes the overall usability of actuator systems based on SMAs in aircraft interiors and the general requirements for electromechanical components in the interior of fixed wing aircrafts.
Table 2 lists the customer requirements gained during the interview, which can be transferred to actuator systems in aircraft interiors in general. These requirements are independent from the actual application. These will be qualified further in Section 5.2.
4. Conceptual Design of SMA-Based Actuator Systems
In order to evaluate the feasibility of the compiled requirements using SMA, possible actuator concepts need to be designed. There are many different ways to create an electromechanical actuator system using SMA-structures. Different solutions are suitable for different applications in aircraft interiors with varying requirements. Therefore, an overview of SMA-based actuator systems must be provided before rating the overall feasibility of an implementation of SMA-based systems in aircraft interiors.
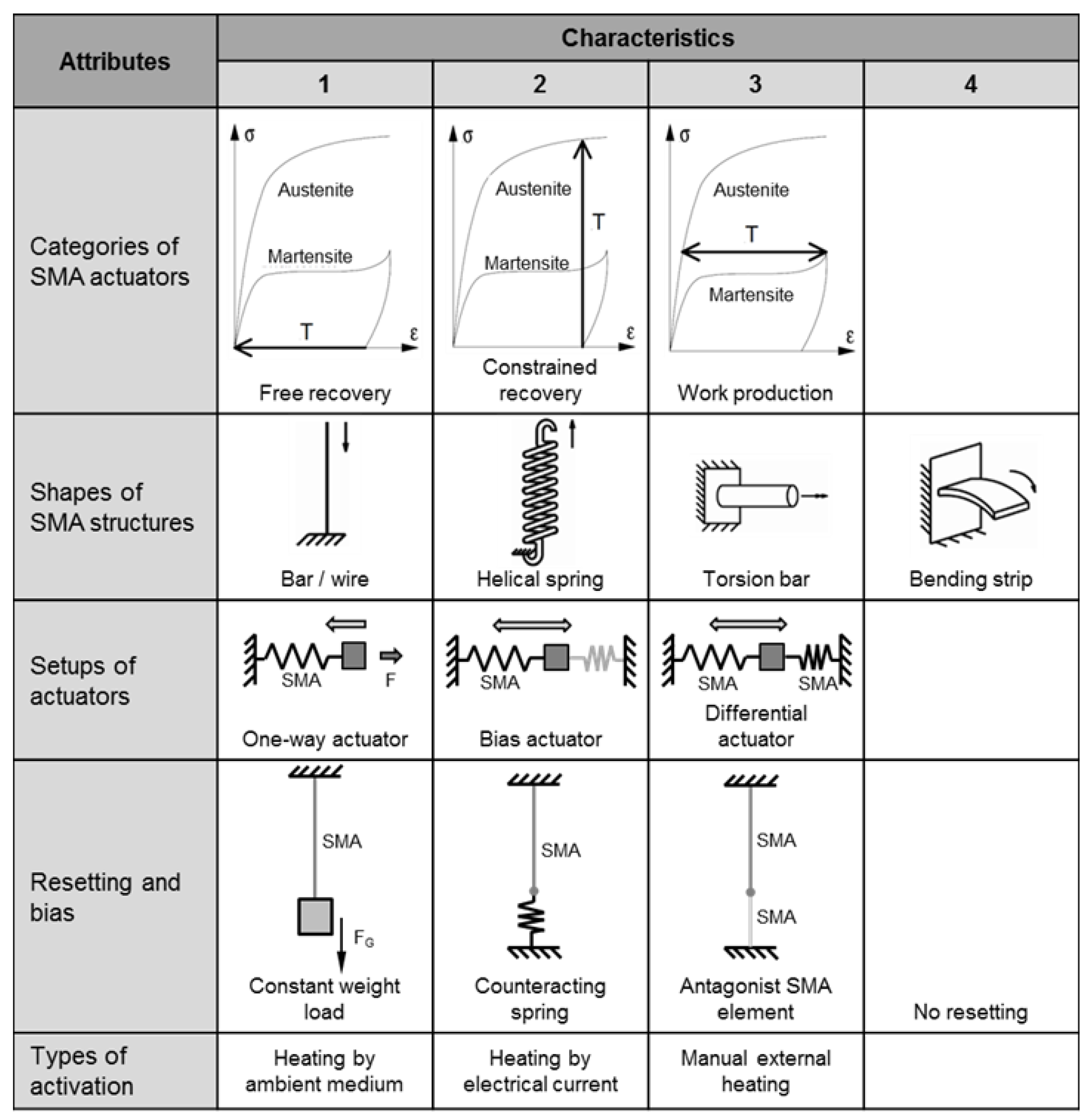
The behavior of SMAs depends mainly on the chosen material [38]. The most common alloy is NiTi, because it provides a stable SME with the biggest effect results. However, there are other alloys, for example based on Cu or Fe, which are also suitable for actuator applications [9]. For the choice of material, the effect result and transformation temperature are crucial [5,39]. Nevertheless, the design of SMA-components involves some technical attributes in order to achieve the best actuator performance possible. Generally, there are three different categories of using the SME for actuation, shown in Figure 1. The first one uses the free recovery of the SME. Without external load, the SMA structure retains its original shape when heated above austenite finish temperature Af and does not alter shape with further temperature changes. Using constrained recovery, the deformed SMA structure is prevented from retaining its original shape when heated above Af. Thereby it generates force. This category is often used for fastening devices. The third category, work production, utilizes the one-way SME in a cyclic sequence by using a constant or cyclic resetting force. When heated above Af, the SMA structure generates force and surmounts the resetting force. While or after cooling, the resetting force moves the structure back into the initial position. This generates periodical actuator cycles [40].
SMA-structures can have different geometries and different original shapes [41], but not every structural shape is suitable for actuator applications [15,40]. Figure 1 shows the most important and common SMA-structures used for actuation. A wire, which is strained, provides a relatively high life span because it is loaded evenly. Moreover, it is comparatively cheap, because wire is suitable for mass production. However, SMA wire only provides small displacement. Helical springs have bigger cross-sections than wires and are therefore slower in activation and cooling, but they provide bigger usable displacements. An SMA torsion bar can realize big actuation angles, but is not evenly loaded and thereby has only limited lifetime. A bent strip of SMA sheet can also realize big angles but experiences uneven load. Additionally, problems with retaining the original shape can occur in this structure [41].
SMA-structures can be arranged in three different actuator setups, visualized by SMA-springs, but they can consist of any SMA-structure. The first actuator type, the one-way actuator, consist of only one SMA spring that moves an actuation element when heated. To prepare the next actuator cycle, it needs to be elongated again manually. Within the next actuator setup, the bias actuator, a non-SMA resetting force provides reset and pretension for the SMA element. With this simple setup two-way actuation is possible with heating and cooling one SMA element [43]. The last actuator type, the differential actuator, contains two opposed SMA elements which can be activated independently. When one element is heated, it resets the other SMA structure and moves the actuation element [42]. No other resetting force is needed [44]. This actuator type is also called the agonist-antagonist principle [41]. The significant difference between a bias and a differential actuator is that the bias actuator generates a movement or force in one direction with the activation. With the cooling it is reset again. The differential actuator, on the other hand, can be activated actively in both directions, whereby the opposite element is reset.
Furthermore, there are different possibilities to realize the resetting of SMA-elements. The simplest method is a constant weight load, which is mainly used in laboratory testing. But this method is unsuitable for mobile actuator systems, e.g., in vehicles [40,44]. Another simple solution is the usage of a passive counteracting spring [40]. This method limits the work produced by the actuator due to spring characteristics, but is the most flexible and feasible solution [41]. Using an antagonistic SMA element, as described above, is also a common solution [20].
SMAs can be heated to the phase transformation temperature (PTT) through different procedures. The first method is heating through an ambient medium. This type of activation is especially suitable for self-regulating actuators [42]. The SMA can also be heated by passing an electrical current through it. The material resistance heats the material and activates it [42]. The last type is the activation by manual external heating. This can be achieved using heating elements or radiant heaters [43].
Some characteristics of the different attributes in the classification scheme are only compatible with some characteristics of other attributes. There are redundancies between the attributes. This means, for example, that an actuator for which the setup “bias” is selected and combined with an antagonistic SMA element is then assigned to the setup “differential actuator” because it obtains the corresponding properties.
5. Evaluation of Requirements Feasibility
The important question this paper answers is: Is it feasible to implement SMAs in actuator systems in aircraft interiors? In order to find an answer methodically, the authors rate and evaluate the gathered requirements. Additionally, they describe and evaluate all technical attributes and other solutions that influence the critical requirements.
5.1. Rating the Applicability of SMA-Based Actuators in Aircraft Interiors
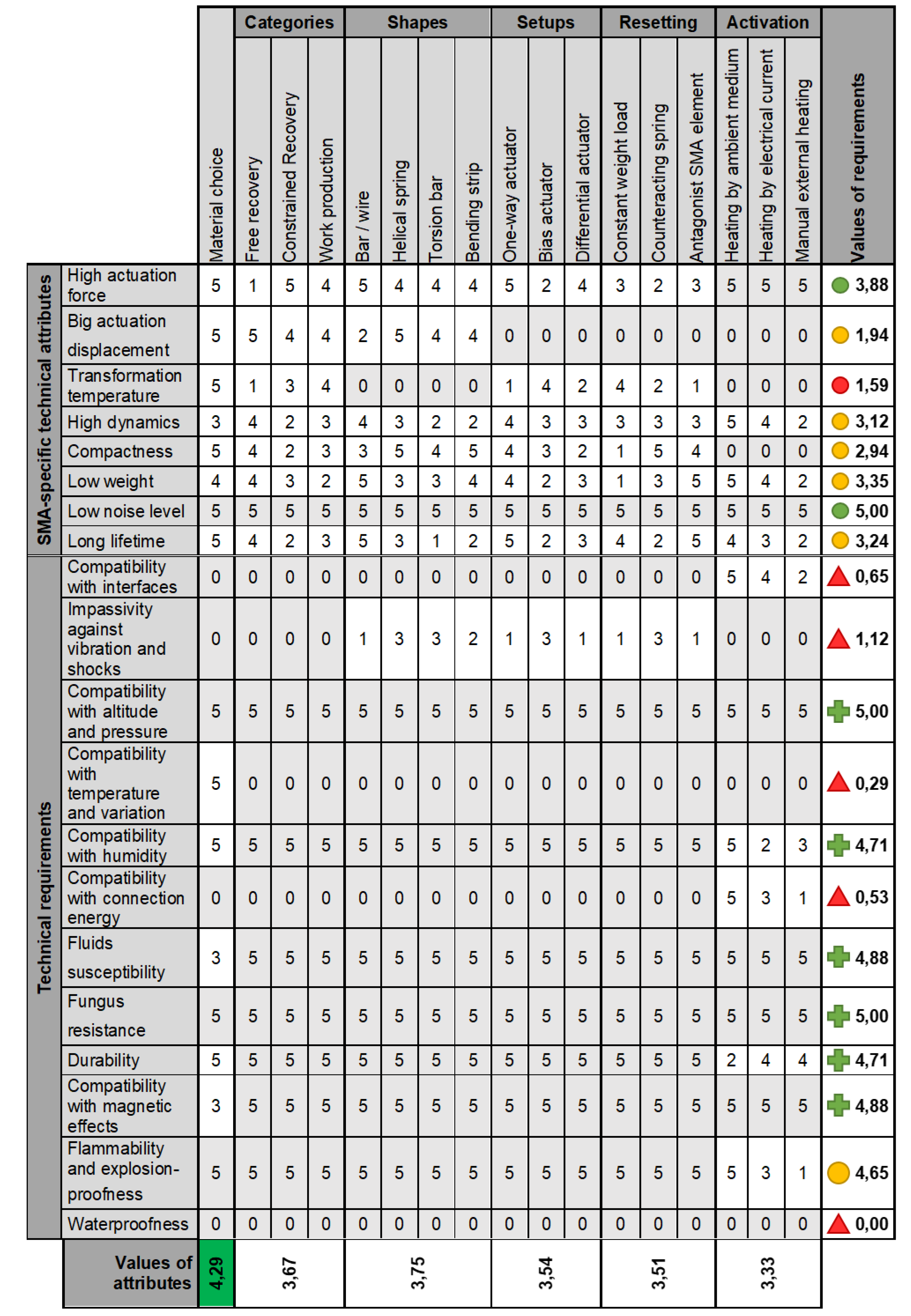
In order to methodically evaluate the applicability of SMA actuators in aircraft interiors and to identify any critical limitations, the documented requirements are rated regarding the influence of the technical attributes of conceptual SMA design. Therefore the demanded requirements of the specification (see Table 2) are divided into SMA specific technical attributes (e.g., actuation force and displacement, transformation temperature or actuator lifetime) and other technical requirements. The attributes of conceptual SMA design were documented in Chapter 4. Both categories are listed in the rating matrix in Figure 2.
First, it is examined which attributes influence the various requirements. If where the requirement is not influenced by the attribute, the cell is highlighted grey in the matrix (see Figure 2). In the next step, it differs between those requirements not influenced by an attribute and which cannot be fulfilled by SMA and those not influenced but still fulfilled. The unfulfilled requirements are rated with a “0”, while the fulfilled ones are rated with a “5”. For example, the noise level of the actuation itself is not influenced by any of the attributes. The requirement is “low noise level”, so it is overall fulfilled by overall noiseless SMA actuators and therefore is rated with “5”. Another example is the waterproofness of the actuator system. It is not influenced by any attribute of SMA actuators and also not fulfilled, because ingress of water would have a critical influence on the functionality of an SMA actuator without further constructive measures. For this reason, it is rated with “0”.
Then every requirement is rated on a scale from 1 to 5, whether the attribute and the working principle have a big positive influence on fulfilling the requirement (rated with “5”) or nearly no positive effect (rated with “1”). The rating bases on literature research and empirical values of experienced users of SMA technology. In the following, the specific scored correlations for the SMA-specific requirements will be explained briefly.
The generated actuation force is highly influenced by the material choice and rated therefore with “5” [5,15,39]. Using free recovery for actuation does not generate actuation force but stroke [40]. Because of this working principle is rated with “1”, while the other actuator categories generate force and are rated with “5” and “4”. The principle of work production is rated lower than the constrained recovery, because the resetting force used for work production (e.g., load, a bias spring or an antagonistic element) limits the actual output force [40]. The shape of SMA elements is decisive for the amount of generated actuator force, but the specific components parameters and characteristics are overall more important [15,40,41]. For this reason, all different shapes are rated with “4” The only exception is the tensile wire rated with “5”, as this is the most effective form of SMA elements in terms of actuator force generation [41]. The setup of a one-way actuator generates maximum force (rated “5”) while a bias actuator with constant resetting force limits the force output (rated “2”) [43]. The differential actuator setup is rated “4”, because it includes a resetting force, but the amount and restrictions of this force depend on the operating parameters (e.g., activation frequency) [42,44]. A resetting force is always limiting the output force of the actuator. The additional drawback of a counteracting spring for resetting is the non-linear force that restricts the actuator differently throughout the activation cycle [40,44,45]. This is why a spring for reset is rated with “2” while both alternatives are rated with “3”. An SMA element generates the same force using different activation strategies assuming a complete phase transformation [42]. Hence, this attribute was collectively rated with “5”.
The actuation stroke depends greatly on material choice (rated “5”) [5,15,39]. The total possible stroke can be achieved with every actuator category, but the constricting categories for generating force may limit the full displacement over time (rated “4”) as opposed to free recovery (rated “5”) [40]. Helical SMA springs are rated to generate the biggest stroke (rated “5”) while wires are designed to generate actuation force (rated “2”). Torsion tubes or beams also focus on generated displacement but are not as effective as helical springs (rated “4”) [15,40,41].
Phase transformation temperature is an SMA characteristic greatly depended on alloy components [5,39,46]. Therefore the material choice is rated with “5”. But it can also be influenced by pre-straining the SMA element [15,45]. This is why attributes using constant resetting force are rated higher (e.g., “4” for constant weight load) than those without the possibility of pre-straining the actuator (e.g., “1” for free recovery).
The dynamics of an SMA actuator is mainly determined by the speed of heating and cooling of the SMA element. The alloy selection plays a subordinate role (rated “3”) [5,45]. The evaluation thus depends on the surface ratio and cooling rate of the SMA element (e.g., wire rated with “4” and bending strip rated with “2”) [15]. A counterforce can slow down the transformation to high temperature phase [40]. However, mechanical stress can also cause a retransformation to martensite and thus a faster recovery [47,48]. The use of restoring forces determines the category, setup and reset ratings.
The compactness of an SMA actuator is largely determined by the number, size and interaction of the necessary components [24,46]. Accordingly, the rating of the attributes in this row is mainly determined by these factors. The same applies to the actuator system weight. For example, a weight load for resetting (rated “1”) usually requires more space and weight than a reset spring (rated “5”).
Actuator lifetime is influenced by different factors such as material choice (rated “5”) [5,19,39] or the SMA element’s shape. While SMA wires have the longest lifetime (rated “5”) [15,45], torsion tubes only last a small number of activation cycles (rated “1”) [41]. Another influence that shortens the lifetime is the use of pre-stress or constant reset force [19]. This factor dictates the evaluation of the actuator category, setup and reset. Finally, the risk of overheating during activation of the SMA element also has an impact [19]. This danger is comparatively low (rated “4”) when, for example, the ambient medium is used as a heat source.
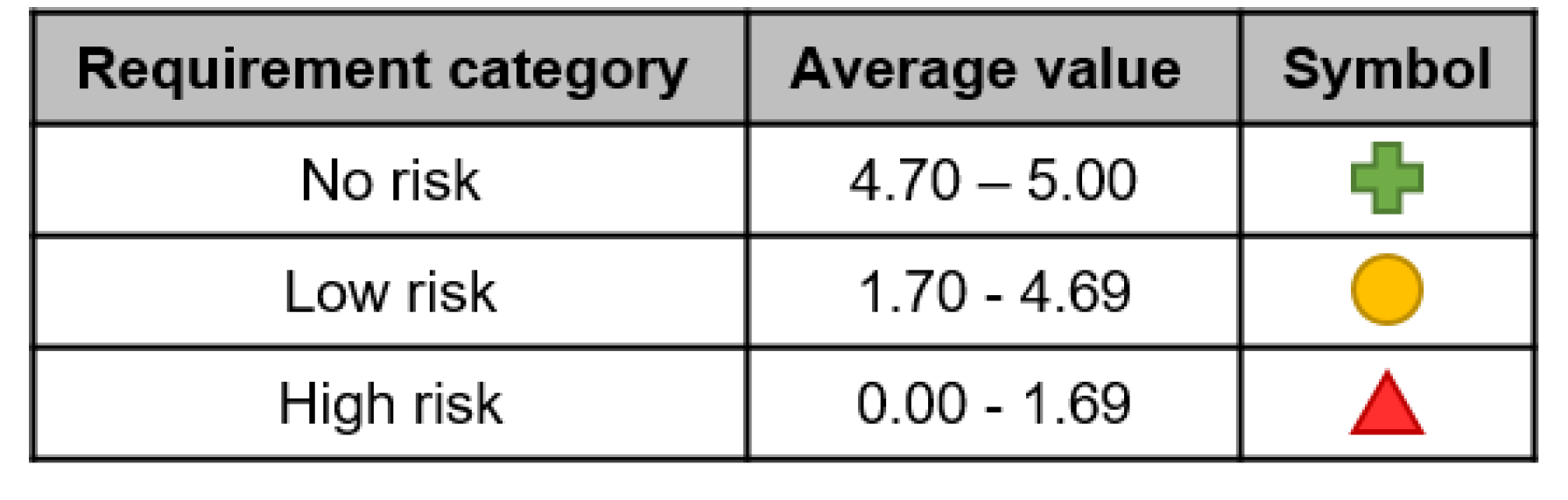
In a last step, the arithmetical average of all ratings for every requirement and for every attribute is calculated. The average values of the requirements are underlined by a traffic light system. Requirements without a risk to be not-fulfilled by SMA based systems are marked with a green symbol (values larger than 4.70). Requirements rated with a low risk (values between 1.70 and 4.69) are assigned a yellow symbol and high-risk requirements (values up to 1.69) a red symbol (see Figure 3). Thereby it is easy to recognize which requirements are critical and non-critical for SMA-based systems. The critical requirements are further discussed in Section 5.2.
The average value of the technical attributes is an indicator of the impact the certain attribute has on the success of a development project. The more influence an attribute has on the performance of the SMA actuator, the more important it is during the design process and for fulfilling the requirements. Regarding the averages of all attributes, there is no big difference between values except for the attribute “material choice”. This particular high value underlines the importance of the choice of a suitable shape memory material [39], because it affects nearly all aspects of SMA actuator design and mainly influences the fulfillment of requirements.
5.2. Cluster of Critical Requirements
As already described above, Figure 2 gives information about the risk of not fulfilling requirements with an SMA based actuator system. The risk category of a requirement shows how difficult it is to fulfill this requirement using SMA. Requirements with the maximum value 5.00 are overall non-critical for SMA actuators. For example, low noise level and fungus resistance are not problematic for SMA based systems. Other requirements with similar high values are also no significant risk for the implementation of SMA actuation:
- compatibility with humidity,
- durability,
- fluids susceptibility and
- compatibility with magnetic effects.
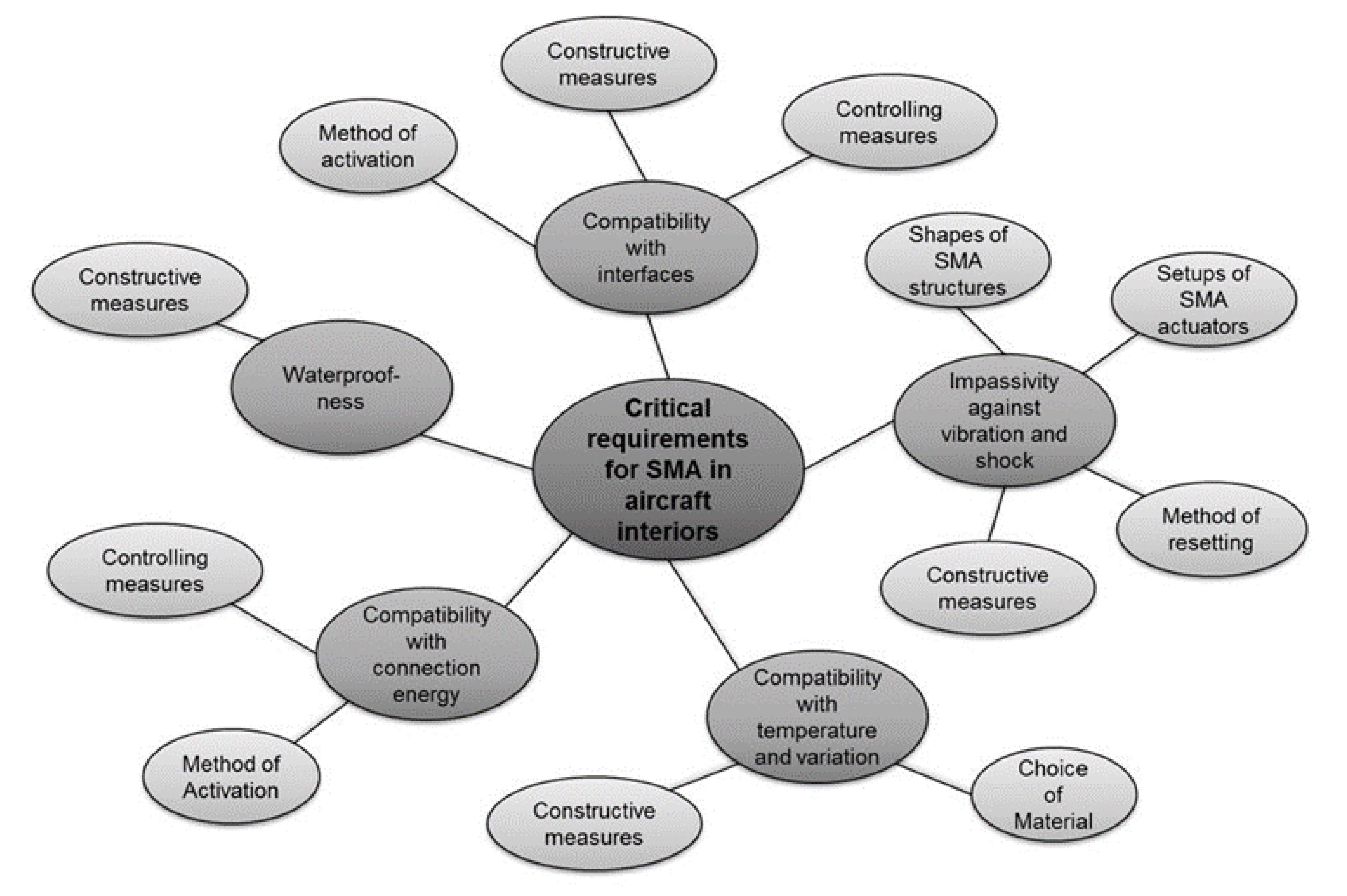
Most technical attributes are compatible with those requirements or there are working principles which have big positive influence on the fulfillment of said requirements. Low-risk requirements are also feasible for SMA-based systems. Regarding these requirements, it is important to choose suitable materials and working principles for an actuator system. Figure 4 gives an idea of which design attributes and characteristics can help fulfill these requirements. However, it is more important to analyze which requirements are particular critical for SMA-based systems and whether there are attributes or other solutions for achieving a requirement conform actuator system. In Figure 2 the high-risk requirements with a rating less than 1.69 can be easily identified. Critical requirements are:
- waterproofness,
- compatibility with temperature and temperature variation,
- compatibility with connection energy,
- compatibility with interfaces, and
- impassivity against vibration and shock.
The cluster (Figure 4) shows these five critical requirements. Each requirement is linked to the attributes and solutions that help meeting the requirement.
The critical requirement “compatibility with temperature and variation” is mainly depending on the choice of material. Different SMAs exhibit different ranges of transformation temperatures. If an actuator is supposed to operate at temperatures higher than austenite start temperature, operation will not be reliable. Also, the actuator must not activate at ground survival temperatures. There are some possibilities, for example altering the transformation temperature by tension or isolating the casing, but no constructive measure can compensate if the material is unsuitable for an application.
As mentioned above, the “compatibility with connection energy” is critical for the usage of SMA in aircraft interiors. The aircraft’s energy system is limited to a certain voltage, current, and high voltage peaks can occur. The method of activation influences the type of connection between energy system and actuator. If the activation is realized using an ambient medium, a direct connection is unnecessary. When using external heating (e.g., via a thermocouple) it is debatable if the provided connection energy is sufficient for fast and efficient heating, providing suitable actuation dynamics. Using controlling measures for protection of the SMA, a direct connection using heating by electric current can be possible. Every measure needs to be further evaluated according to certification testing, to make sure the actuator is protected against peaks or fluctuation and can operate reliably under these conditions.
Summing up, the identified critical requirements can be problematic for SMA-based systems. Involving controlling or constructive adaptations, some of these critical requirements can be fulfilled with moderate effort, like using a hermetic sealed casing for waterproofness. Other problems require more complex measures, like precise SMA-specific actuator design for compatibility with the required operation temperature.
The actuator lifetime is not rated as an especially critical requirement, even though the lifetime of SMA elements cannot be predicted reliably [22,45]. Depending on the application, lifetime requirements vary greatly from single emergency triggers to valves with several thousand switching cycles per long-distance flight. For reliable operation, monitoring is essential with most SMA-based systems (e.g., via the self-sensing effect [49]). It is also possible to replace actuator modules in accordance with the aircraft’s maintenance cycles as a preventive measure to compensate for the short lifetime of individual SMA elements. For these reasons, actuator lifetime can be considered a low-risk requirement.
5.3. Realized SMA Actuators for Aircraft Interiors
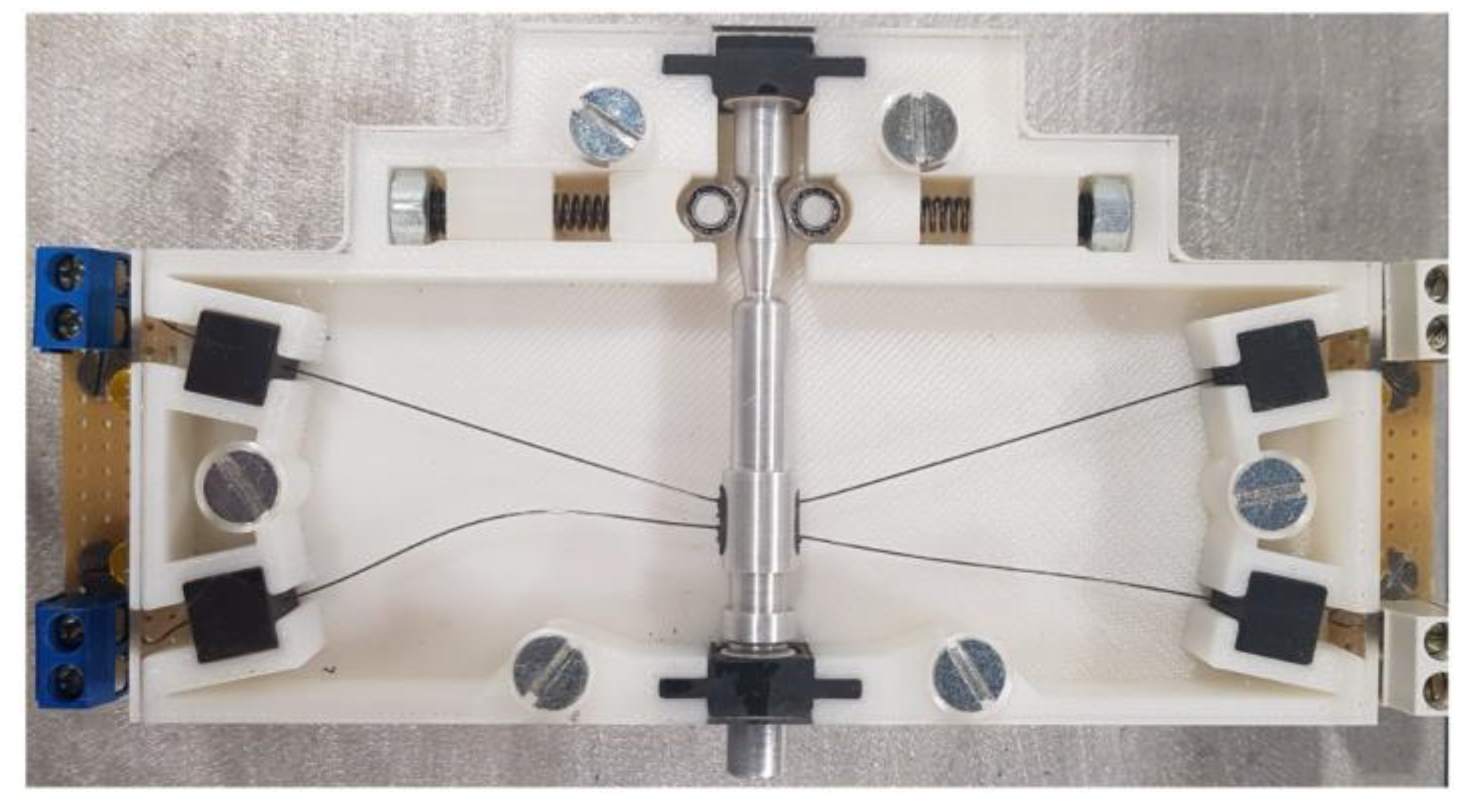
Based on the performed evaluation, SMA-based actuator systems were developed for a variety of applications which meet the required values and are thus suitable for use in aircraft interiors. In addition to an unconventional alternative for a valve system and a brake mechanism for an electric motor to replace comparable magnetic systems [50], a locking mechanism was developed [51]. This lock will be described briefly below. The initial application case was the use in cabin doors (e.g., Lavatory doors), but also the transfer to other areas such as luggage compartments is possible. The complete system can be seen in Figure 5. The actuator is based on the antagonistic principle with two NiTi-wires that can be activated alternatingly to switch the door latch between two positions. Each of these end positions is held by a mechanical interlock. It has been shown that this locking device can satisfy even the demanding temperature requirements in aircraft interiors using the integrated sensor functions of SMA [52]. It is thus an example of the good usability of SMA actuators in this area.
6. Conclusions and Outlook
The detailed analysis of requirements and certification standards for electromechanical systems has served to verify that SMA-based actuators have indeed many possible applications in aircraft interiors. It is not only possible to fulfill the high requirements of aviation standards using SMAs as an actuator material, but they also offer unique advantages compared to other technologies. In aircraft interiors, compactness and low weight are of particular importance. These two properties legitimize the partly higher costs of SMA-actuators, which, in other fields, would be an obstacle for implementing SMAs.
Nevertheless, there are still some critical requirements for SMAs. The proposed solutions lay the basis for further research. As this work has shown the general applicability of SMAs in aircraft interiors, it is now important to evaluate whether SMAs are beneficial in certain applications. The methodical development and thorough testing of an actuator system based on SMAs are still crucial steps in order to create a reliable and precise product.
Author Contributions
Conceptualization, B.K.; Data curation, A.W.; Funding acquisition, B.K.; Investigation, A.W.; Methodology, A.W.; Project administration, B.K.; Visualization, A.W.; Writing–original draft, A.W.; Writing–review & editing, B.K.
Funding
The authors acknowledge the funding of the FLAAI project by the Federal Ministry for Economic Affairs and Energy through the Aircraft Research Program V. Additionally, the authors acknowledge support by the DFG Open Access Publication Funds of the Ruhr-Universität Bochum.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Bundesverband der Deutschen Luftverkehrswirtschaft e.V. Report on Energy Efficiency and Climate Protection in Air Traffic in Essential Ratios; Bundesverband e.V.: Berlin, Germany, 2015. [Google Scholar]
- Braun, N. How Can Aviation Become More Environmentally Friendly? Available online: http://www.airliners.de/wie-luftfahrt-antworten-cockpit-12/36398 (accessed on 10 July 2019). (In German).
- Bundesverband der Deutschen Fluggesellschaften e.V. Climate & Environment. Available online: http://www.bdf.aero/themen/klima-umwelt (accessed on 10 July 2019). (In German).
- Bundesverband der Deutschen Fluggesellschaften e.V. Technical Progress for Even Greater Energy Efficiency. Available online: http://www.bdf.aero/themen/klima-umwelt/technischer-fortschritt (accessed on 10 July 2019). (In German).
- Lagoudas, D.C. Shape Memory Alloys Modeling and Engineering Applications; Springer US: New York, NY, USA, 2008; ISBN 978-0-387-47684-1. [Google Scholar]
- Lygin, K. A Methodology for the Development of Environment-Activated FG Actuators with Low Thermal Hysteresis Using the Example of Heating and Air-Conditioning Technology. In German: Eine Methodik zur Entwicklung von umgebungsaktivierten FG-Aktoren mit geringer thermischer Hysterese am Beispiel der Heizungs- und Klimatechnik; Verlag Dr. Hut GmbH: München, Germany, 2014; ISBN 9783843916202. [Google Scholar]
- Liu, Y.; Kohl, M. Shape Memory Microvalves with High Energy Density, In German: Formgedächtnis-Mikroventile mit hoher Energiedichte. Master’s Thesis, Karlsruhe Institute of Technology (KIT), Karlsruhe, Germany, 2003. [Google Scholar]
- Jani, J.M.; Leary, M.; Gibson, M.A. A review of shape memory research, applications and opportunities. Mater. Des. 2014, 56, 1078–1113. [Google Scholar] [CrossRef]
- Treppmann, D. Thermomechanical Treatment of NiTi with Solutions for Quality Assurance and Standardization of Shape Memory Alloys. In German: Thermomechanische Behandlung von NiTi mit Lösungsansätzen für Qualitätssicherung und Normung von Formgedächtnislegierungen. Master’s Thesis, Ruhr-Universität Bochum, Bochum, Germany, 1996. [Google Scholar]
- Mavroidis, C.; Pfeiffer, C.; Mosley, M. Conventional Actuators, Shape memory alloys and Electrorheological fluids. In Automation, Miniature Robotics and Sensors for Non-Destructive Testing and Evaluation; ASNT: Columbus, OH, USA, 1999. [Google Scholar]
- Musolff, A. Experimental Investigation and Building of Adaptive Structures. Master’s Thesis, Ruhr-Universität Bochum, Bochum, Germany, 2005. [Google Scholar]
- Schiedeck, F.; Mojrzisch, S. Improvement of SMA Actuator Performance Using Self-Sensing. In Proceedings of the 11th International Conference on New Actuators, ACTUATOR 2008, Bremen, Germany, 9–11 June 2008; pp. 891–894. [Google Scholar]
- Janocha, H. Adaptronics and Smart Structures. Basics, Materials, Design, and Applications, 2nd ed.; Springer-Verlag: Berlin/Heidelberg, Germany, 2007; ISBN 3540719652. [Google Scholar]
- Ohkata, I.; Suzuki, Y. The design of SMA actuators and their applications. In Shape Memory Materials; Otsuka, K., Wayman, C.M., Eds.; Cambridge University Press: Cambridge, UK, 1998. [Google Scholar]
- Gümpel, P.; Gläser, S.; Jost, N.; Mertmann, M.; Seitz, N.; Strittmatter, J. Shape memory alloys Applications in mechanical engineering, medical technology and actuators. In German: Formgedächtnislegierungen Einsatzmöglichkeiten in Maschinenbau, Medizintechnik und Aktuatorik; Expert Verlag: Renningen, Germany, 2004; ISBN 3-81692293-7. [Google Scholar]
- Kristen, M. Investigation into the electrical control of shape memory drives in handling technology. In German: Untersuchung zur elektrischen Ansteuerung von Formgedächtnis-Antrieben in der Handhabungstechnik; Technische Universität Braunschweig: Braunschweig, Germany, 1994. [Google Scholar]
- Johnson Matthew Medical Components. Nitinol-Technical-Properties. Available online: http://jmmedical.com/resources/221/Nitinol-Technical-Properties.html (accessed on 10 July 2019).
- Wagner, M.F. Ein Beitrag zur Strukturellen und Funktionalen ERMÜDUNG von Drähten und Federn aus NiTi-Formgedächtnislegierungen. Master’s Thesis, Ruhr Universität Bochum, Bochum, Germany, 2005. [Google Scholar]
- Eggeler, G.; Hornbogen, E.; Yawny, A.; Heckmann, A.; Wagner, M. Structural and functional fatigue of NiTi shape memory alloys. Mater. Sci. Eng. A 2004, 378, 24–33. [Google Scholar] [CrossRef]
- Sofla, A.Y.N.; Elzey, D.M.; Wadley, H.N.G. Cyclic degradation of antagonistic shape memory actuated structures. Smart Mater. Struct. 2008, 17, 25014. [Google Scholar] [CrossRef]
- Erbstoeszer, B.; Armstrong, B.; Taya, M.; Inoue, K. Stabilization of the shape memory effect in NiTi: An experimental investigation. Scr. Mater. 2000, 42, 1145–1150. [Google Scholar] [CrossRef]
- Pathak, A. The Development of an Antagonistic SMA Actuation Technology for the Active Cancellation of Human Tremor. Ph.D. Thesis, University of Michigan, Ann Arbor, MI, USA, 2010. [Google Scholar]
- Prahlad, H.; Chopra, I. Design of a Variable Twist Tilt-Rotor Blade Using Shape Memory Alloy (SMA) Actuators. In Proceedings of the 8th Annual International Symposium on Smart Structures and Materials, Newport Beach, CA, USA, 4–8 March 2001; pp. 46–59. [Google Scholar]
- Huang, W. Shape Memory Alloys and their Application to Actuators for Deployable Structures. Ph.D. Thesis, University of Cambridge, Cambridge, UK, 1998. [Google Scholar]
- Landis, G.A.; Jenkins, P.P. Dust on Mars: Materials Adherence Experiment results from Mars Pathfinder. In Proceedings of the Photovoltaic Specialists Conference, Anaheim, CA, USA, 29 September—3 October 1997; pp. 865–869. [Google Scholar] [CrossRef]
- Peffer, A.; Denoyer, K.; Fosness, E.; Sciulli, D. Devlopment and Transition of Low-Shock Spacecraft Release Devices. In Proceedings of the Aerospace Conference, Big Sky, MT, USA, 25 March 2000; pp. 277–284. [Google Scholar]
- Kauffman, G.B.; Mayo, I. The Story of Nitinol: The Serendipitous Discovery of the Memory Metal and Its Applications. Science and technology abound with examples of serendipity. Chem. Educ. 1996, 2, 1–21. [Google Scholar] [CrossRef]
- Yamauchi, K.; Ohkata, I.; Tsuchiya, K.; Miyazaki, S. Shape Memory and Superelastic Alloys. Technologies and Application; Woodhead Publishing: Cambridge, UK, 2011; ISBN 978-1-84569-707-5. [Google Scholar]
- Bil, C.; Massey, K.; Abdullah, E.J. Wing morphing control with shape memory alloy actuators. J. Intell. Mater. Syst. Struct. 2013, 24, 879–898. [Google Scholar] [CrossRef]
- Sofla, A.Y.N.; Meguid, S.A.; Tan, K.T.; Yeo, W.K. Shape morphing of aircraft wing: Status and challenges. Mater. Des. 2010, 31, 1284–1292. [Google Scholar] [CrossRef]
- Kudva, J.N. Overview of the DARPA Smart Wing Project. J. Intell. Mater. Syst. Struct. 2004, 15, 261–267. [Google Scholar] [CrossRef]
- Hartl, D.J.; Lagoudas, D.C. Aerospace applications of shape memory alloys. J. Aerosp. Eng. 2007, 221, 535–552. [Google Scholar] [CrossRef] [Green Version]
- Pitt, D.; Dunne, J.; White, E.; Garci, E. SAMPSON Smart Inlet SMA Powered Adaptive Lip Design and Static Test. In Proceedings of the 42nd AIAA Structures, Structural Dynamics and Materials Conference, Seattle, WA, USA, 16 April 2001; pp. 1–11. [Google Scholar]
- Eppler, C. Entriegelung von Sauerstoffmasken mit Formgedächtnislegierungen. Available online: https://www.iwu.fraunhofer.de/content/dam/iwu/de/documents/Infoblatt/Infoblatt-Entriegelung-von-Sauerstoffmasken.pdf (accessed on 10 July 2019).
- Bokaie, M.D.; Busch, J.D.; Johnson, A.D.; Petty, B. Release Device for Retaining Pin. U.S. Patent 5,771,742, 30 June 1998. [Google Scholar]
- TZ Aero Asset Maintainability. New Mechanisms: Freedom to Design New Configurations. Available online: http://aam.tz.net/new-mechanisms (accessed on 22 February 2015).
- Ahrens, G. Das Erfassen und Handhaben von Produktanforderungen: Methodische Voraussetzungen und Anwendungen in der Praxis. Ph.D. Thesis, Technische Universität Berlin, Berlin, Germany, 2000. [Google Scholar]
- Benafan, O.; Brown, J.; Calkins, F.T.; Kumar, P.; Stebner, A.P.; Turner, T.L.; Vaidyanathan, R.; Webster, J.; Young, M.L. Shape memory alloy actuator design: CASMART collaborative best practices and case studies. Int. J. Mech. Mater. Des. 2014, 10, 1–42. [Google Scholar] [CrossRef]
- Verein Deutscher Ingenieure. Produktentwicklung mit Formgedächtnislegierungen (FGL). Werkstoffauswahl und Nomenklatur; The Verein Deutscher Ingenieure (VDI): Düsseldorf, Germany, 2017; ICS 77.100, 77.120.99 (VDI 2248 Blatt 2). [Google Scholar]
- Kohl, M. Development of Microactors from Shape Memory Alloys. In German: Entwicklung von Mikroaktoren aus Formgedächtnislegierungen; Institute of Microstructure Technology IMT: Eggenstein-Leopoldshafen, Germany, 2002. [Google Scholar]
- Langbein, S. Local Configuration and Partial Activation of Shape Memory Effect to Create Smart Part Structures. In German: Lokale Konfiguration und partielle Aktivierung des Formgedächtniseffektes zur Erzeugung smarter Bauteilstrukturen. Ph.D. Thesis, Ruhr Universität Bochum, Bochum, Germany, 2009. [Google Scholar]
- Huang, W. On the selection of shape memory alloys for actuators. Mater. Des. 2002, 23, 11–19. [Google Scholar] [CrossRef]
- Langbein, S.; Czechowicz, A. Design Practice Shape Memory Technology Potentials—Design—Examples. In German: Konstruktionspraxis Formgedächtnistechnik Potentiale—Auslegung–Beispiele; Springer Vieweg: Wiesbaden, Germany, 2013; ISBN 978-3-8348-1957-4. [Google Scholar]
- Schiedeck, F. Entwicklung eines Modells für Formgedächtnisaktoren im geregelten dynamischen Betrieb; PZH Produktionstechn; Zentrum: Garbsen, Germany, 2009. [Google Scholar]
- Verein Deutscher Ingenieure. Produktentwicklung mit Formgedächtnislegierungen (FGL). Entwicklungsmethodik; The Verein Deutscher Ingenieure (VDI): Düsseldorf, Germany, 2017; ICS 77.100, 77.120.99 (VDI 2248 Blatt 5). [Google Scholar]
- Benafan, O.; Brown, J.; Calkins, F.T.; Kumar, P.; Stebner, A.; Turner, T.; Vaidyanathan, R.; Webster, J.; Young, M.L. Shape Memory Alloy Actuator Design: CASMART Collaborative Best Practices. In Proceedings of the ASME 2011, Baltimore, MD, USA, 17–21 July 2011. [Google Scholar]
- Motzki, P. Advanced Design and Control Concepts for Actuators Based on Shape Memory Alloy Wires. Ph.D. Thesis, Universität des Saarlandes, Saarbrücken, Germany, 2018. [Google Scholar]
- Ditman, J.B.; Bergman, L.A.; Tsao, T.-C. The Design of Extended Bandwidth Shape Memory Alloy Actuators. J. Intell. Mater. Syst. Struct. 1996, 7, 635–645. [Google Scholar] [CrossRef]
- Rathmann, C.; Fleczok, B.; Kreimeier, D. An investigation using self-sensing to estimate the lifetime of shape memory actuators. In Proceedings of the International Conference on Applied Science and Engineering, Seoul, Korea, 27–29 June 2015. [Google Scholar]
- Kreimeier, D.; Otibar, D.; Weirich, A. Vorhaben: FLAAI—Formgedächtnis-Leichtbauaktoren für Anwendungen im Aircraft-Interiorbereich, Schlussbericht zum BMWi Projekt im Rahmen des LuFo V-1 Förderlinie “Ökoeffizientes Fliegen; Ruhr Universität Bochum: Bochum, Germany, 30 September 2017. [Google Scholar]
- Otibar, D.; Weirich, A.; Kortenjann, M.; Kuhlenkötter, B. A Preliminary Investigation of Temperature Dependency of a Shape Memory Actuator with Time-Based Control in Aircraft Interiors. IOP Conf. Ser. Mater. Sci. Eng. 2017, 216, 12009. [Google Scholar] [CrossRef] [Green Version]
- Weirich, A.; Otibar, D.; Theren, B.; Kuhlenkötter, B. Integration einer Zustandsüberwachung in eine antagonistische form-gedächtnisbasierte Verriegelung. Integration of a Condition Monitoring System into an Antagonistic Shape Memory Based Locking Device. In Proceedings of Fachtagung Mechatronik 2019, Paderborn, Germany, 27–28 March 2019; pp. 73–78. [Google Scholar]

Figure 2.
Rating of requirement feasibility.

Figure 3.
Risk categories of the requirements.

Figure 4.
Cluster of critical requirements and influencing SMA specific attributes.

Figure 5.
Locking device based on antagonistic SMA-wires.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Characteristics | NiTi | |
|---|---|---|
| Transformation properties | Temperature hysteresis | ~30 [K] |
| Transformation temperature | −100…+100 [°C] | |
| Specific energy density | 3000 [J/kg] | |
| Max. attainable strain (one-way effect) | 8 [%] | |
| Max. attainable strain (two-way effect) | 4–6 [%] | |
| Max. attainable strain (pseudoelastic effect) | 7 [%] | |
| Typical number of cycles | 100,000 | |
| Mechanical properties | Admissible stress for actuator cycling | 150–50 [MPa] |
| Young’s modulus | 35–70 [GPa] | |
| Yield strength | 70–690 [MPa] | |
| Tensile strength | 800–1000 [MPa] | |
| Elongation to Failure | 40–50 [%] | |
| Physical properties | Density | 6.45 [g/cm³] |
| Thermal conductivity | 6.6–10 [10−6 K−4] | |
| Electrical resistivity | 0.5–1.1 [10−6 Ωm] | |
| Corrosion resistance | Very good | |
| Biological compatibility | Very good | |
| Other | Processing | Difficult |
| Price | Expensive | |
| Sensor function | intrinsic |
Table 2.
Identified customer requirements for SMA-based actuators in aircraft interiors.
| Identified Customer Requirements | |
|---|---|
| Substitute | The product must fulfill all functions the previous product has offered. |
| It must not be bigger/require more space. | |
| It must be at least as light as the previous product. | |
| The manufacturing costs need to be as high as the previous costs or lower. | |
| The product must be compatible with the connected systems. | |
| The power consumption should not be higher than before. | |
| Advanced product | Overall, an advanced product must fulfill all requirements for substitutes, plus: |
| The product must offer new functions. | |
| The manufacturing costs should be lower than the previous costs, except for the case the additional functions legitimate higher costs. | |
| The power consumption should not be higher than before, except for the case the additional functions legitimate higher power consumption. | |
| New product | The product must offer new functions that are only possible with the use of SMA. |
| The benefit of the new product must legitimate additional work and expense. | |
| Universal requirements | The product must be certified to the standards of RTCA 160, ISO 2669, MIL 810 and MIL 202. |
| The standards of relevant aircraft manufacturers must be respected. | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Weirich, A.; Kuhlenkötter, B. Applicability of Shape Memory Alloys in Aircraft Interiors. Actuators 2019, 8, 61. https://doi.org/10.3390/act8030061
AMA Style
Weirich A, Kuhlenkötter B. Applicability of Shape Memory Alloys in Aircraft Interiors. Actuators. 2019; 8(3):61. https://doi.org/10.3390/act8030061
Chicago/Turabian StyleWeirich, Antonia, and Bernd Kuhlenkötter. 2019. "Applicability of Shape Memory Alloys in Aircraft Interiors" Actuators 8, no. 3: 61. https://doi.org/10.3390/act8030061
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.