3.1. General Setup
The initial step to set up a new model system is to agree on a single data format and a N
2-chart that defines the interfaces and connection data between planned and existing components (UAM system elements). Both decisions were made at the initial UAM Design Camp in September 2018 in Hamburg [
43]. In the process of forming an N
2-chart (see
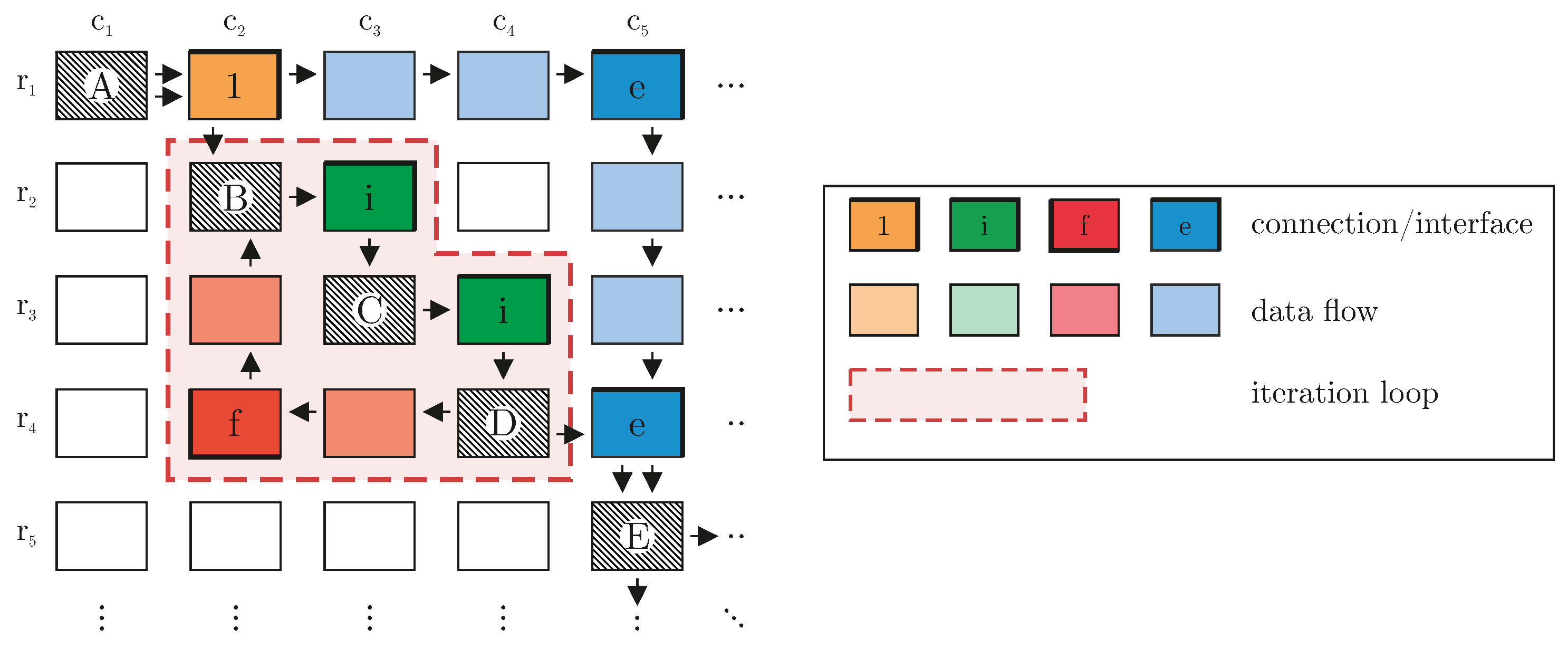
Figure 5), first the N system components are sequenced on the diagonal elements of the matrix, subsequently the identified interdependencies and interactions between these components are marked by off-diagonal elements in the diagram.
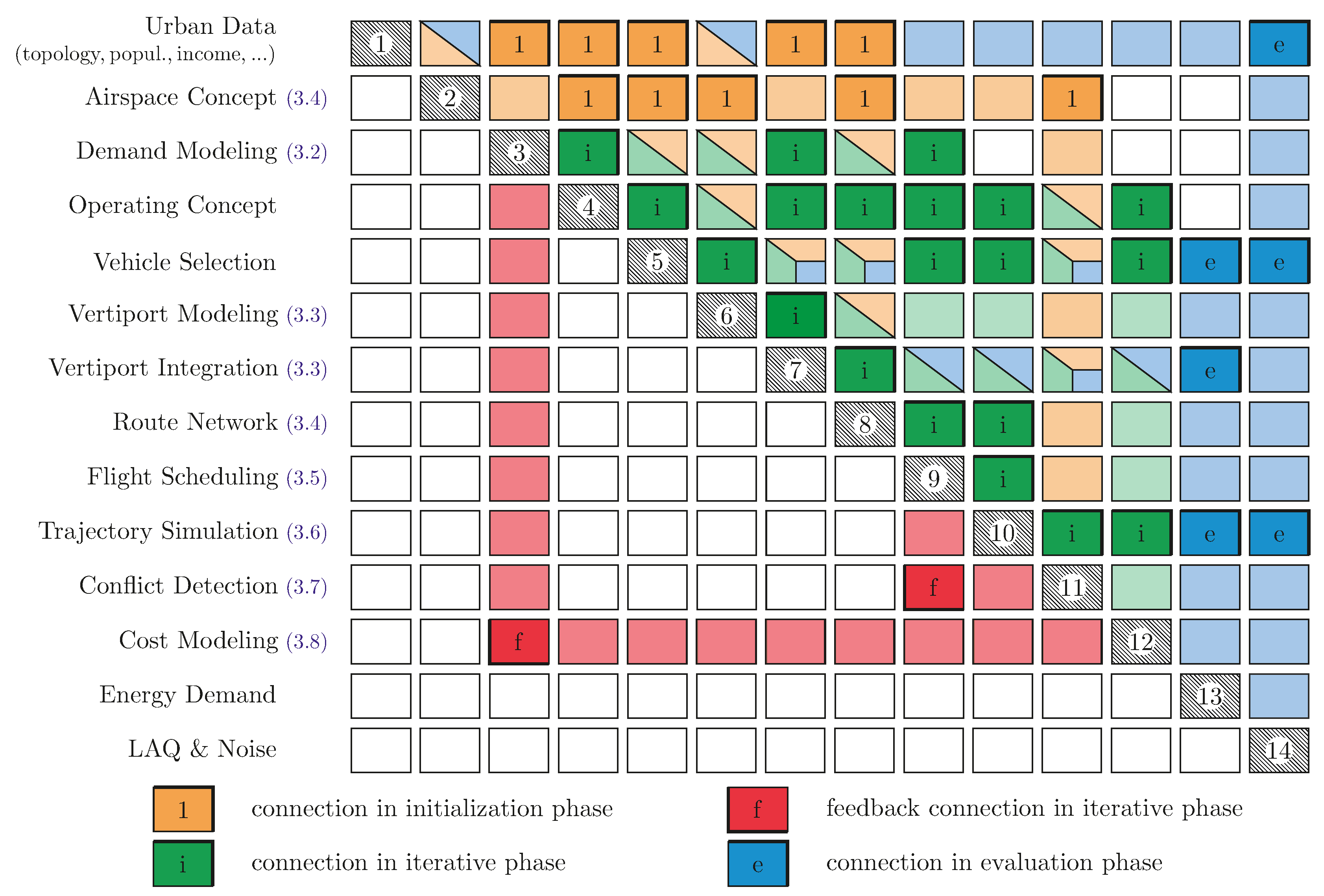
A first overview of the 14 components and the agreed N
2-chart map is presented in
Figure 6. The applied color code highlights the logical segmentation of the planned UAM workflow into three main phases: initialization phase (orange), iterative phase (green and red) and evaluation phase (blue). During the initialization phase, all relevant data for starting the iteration mode are obtained and calculated. After the iteration loops have passed all cycles, the evaluation phase begins, in which derived results are assessed regarding various criterions. Interdependencies between components (diagonal elements) are marked by four different entries which classify the data connection into ‘initial’, ‘iterative’, ‘evaluation’, and ‘feedback’-information. The symbols ’1’, ’i’, ’e’ indicate a single or recurring data transfer between two components and are positioned above the diagonal. An initial input of component
n to
m, for instance, is represented by a symbol ‘1’ in row
n and column
m. In the example shown in
Figure 5, component A serves as initial input (’1’) for component B and, thus, as initial input for the iteration loop marked by a red dashed line, inducing the iteration mode. The iteration mode is performed in several cycles until a target condition (e.g., min. deviation or max. number of iteration) is reached. Each cycle is composed of an iterative forward connection (’i’, marked in green above the diagonal), like the input from B to D via component C, and of a feedback connection (’f’, marked in red below the diagonal) in reverse direction, such as the feedback from component ’D’ to component ’B’ in
Figure 5. After the iteration loops have passed all cycles, the evaluation phase begins. Here, components A and D serve as input (’e’) for component E. For a better readability, the rows and columns containing a data flow between components are highlighted with faded colors of the same shade as the corresponding connection symbol (see i.a. the data flow from component A (
) to E (
) via connection ’e’ (
) in
Figure 5). In the case of various data flow types, the highlighted area might be assigned to two or more connection types, visualized by split fields in terms of color (see
Figure 6).
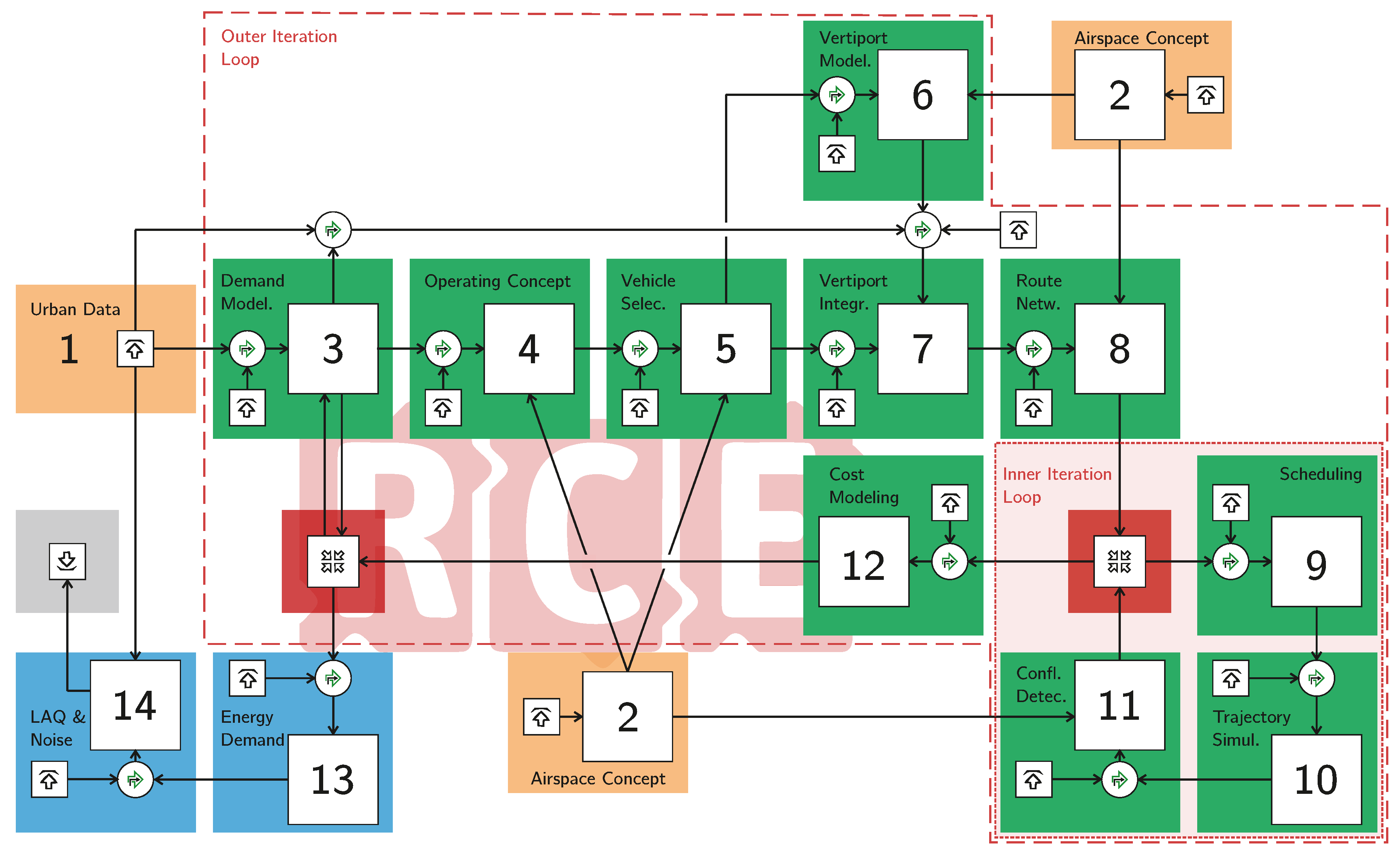
The UAM system module has the following structure (see
Figure 6 and
Figure 7): Under consideration of urban data such as population and income distribution (component 1), a 24 h UAM demand distribution (component 3; see
Section 3.2) is estimated for a given set of origins and destinations. Depending on the origin–destination specific values of demand and the corresponding distances, which in turn depend on the pre-selected airspace concept (component 2; see
Section 3.4), an operating concept is selected to be subject of investigation (component 4). In this context, viable options either comprise a scheduled air shuttle service or an on-demand air taxi service. According to this set of assumptions, a compatible vehicle concept (component 5) is chosen from a database. Subsequently, an infrastructure network is created, assigning the required capacities regarding possible landings and departures of different vertiport designs to the respective urban locations (components 6 and 7; see
Section 3.3). For vertiport integration, 3D building data are used to identify potential take-off and landing sites; values of required and available urban space are compared to derive a feasible solution. With regard to the boundary conditions imposed by the selected airspace concept, the optimal lateral tracks are identified between all vertiport pairs (component 8; see
Section 3.4). Taking the demand into consideration, a flight schedule is created on an hourly basis (component 9; see
Section 3.5), according to which 4D trajectory simulations are conducted, superimposing a vertical mission phase profile with the lateral flight tracks (component 10; see
Section 3.6). In a post operation step, the resulting entirety of trajectories is checked for possible violations of the predefined spatial separation minimum during cruise flight (component 11; see
Section 3.7). For pre-departure deconflicting, detected conflicts will be looped back to flight scheduling (component 9; inner iteration loop). Based on trajectory data of individual flights (e.g., mission time, mission distance and power usage), revenues and expenses are estimated and assessed (component 12; see
Section 3.8). As increasing operating costs have a negative impact on UAM demand, an outer design loop (displayed in light green) between components 12 and 3 is planned. In the final evaluation phase (displayed in blue), the ecological footprint of the UAM system is assessed in terms of energy consumption (component 13), local air quality (LAQ), acoustic, and visual noise (component 14).
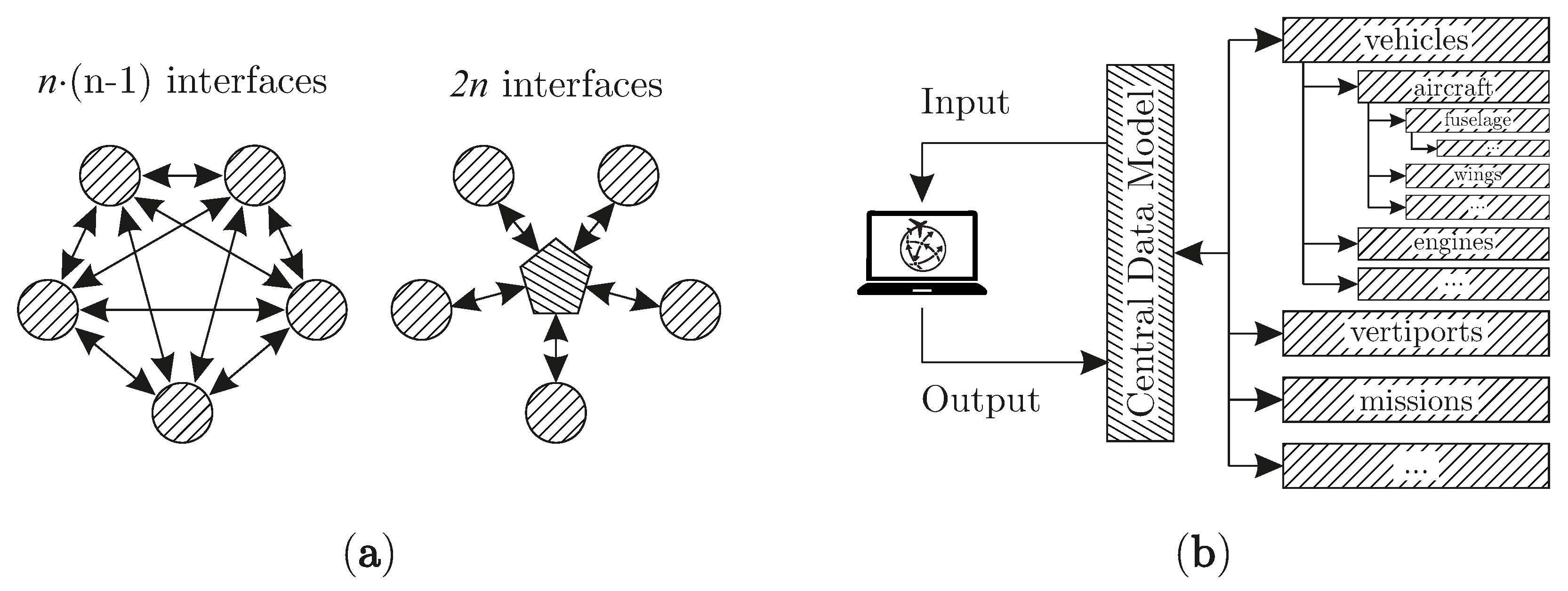
Once the required inputs and available outputs of the individual analysis components have been identified, the data to be exchanged must be integrated into the standard data format. Within this study, CPACS [
41] is used and adapted with regard to the UAM requirements. In this context, the data format is supplemented by parameters as demand and vertiport characteristics. As CPACS has been developed for multi-disciplinary design in distributed environments, both product (i.a. vehicle and engine characteristics, fleets and mission) and process information (like set up information of workflows) can be easily described in a structured, hierarchical manner.
The step of interface definition is followed by setting up and testing the logic and data handling of the entire modeling system. For this reason, a first workflow with ’dummy’ tools has been built within the integration framework RCE (see
Figure 7). In parallel, the development of the required UAM components has begun. If possible, existing models of conventional aviation are used and modified with regard to UAM requirements. In the last step, the extended components are integrated into RCE to replace the dummy tools of the UAM workflow successively.
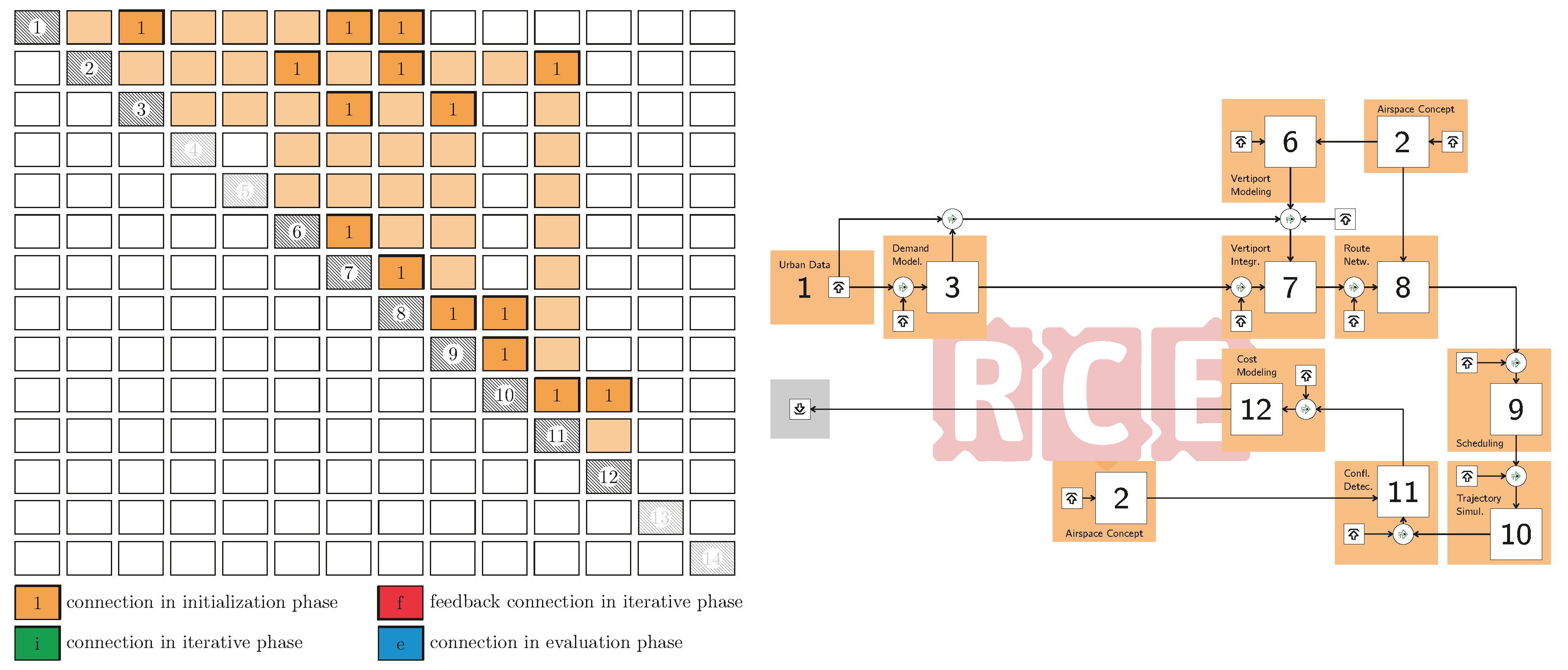
The current state of the UAM system and tool development (first initialization) is schematically shown in
Figure 8. The overall structure and arrangement of components are in accordance with
Figure 6 and
Figure 7. In order to better reflect the current state of development, all dummy-tools are removed in this figure from the RCE workflow. As no feedback connection has been implemented yet, all components are connected by uni-directional data transfer (’1’, orange).
The developed models, which are briefly described in
Section 3.2,
Section 3.3,
Section 3.4,
Section 3.5,
Section 3.6,
Section 3.7,
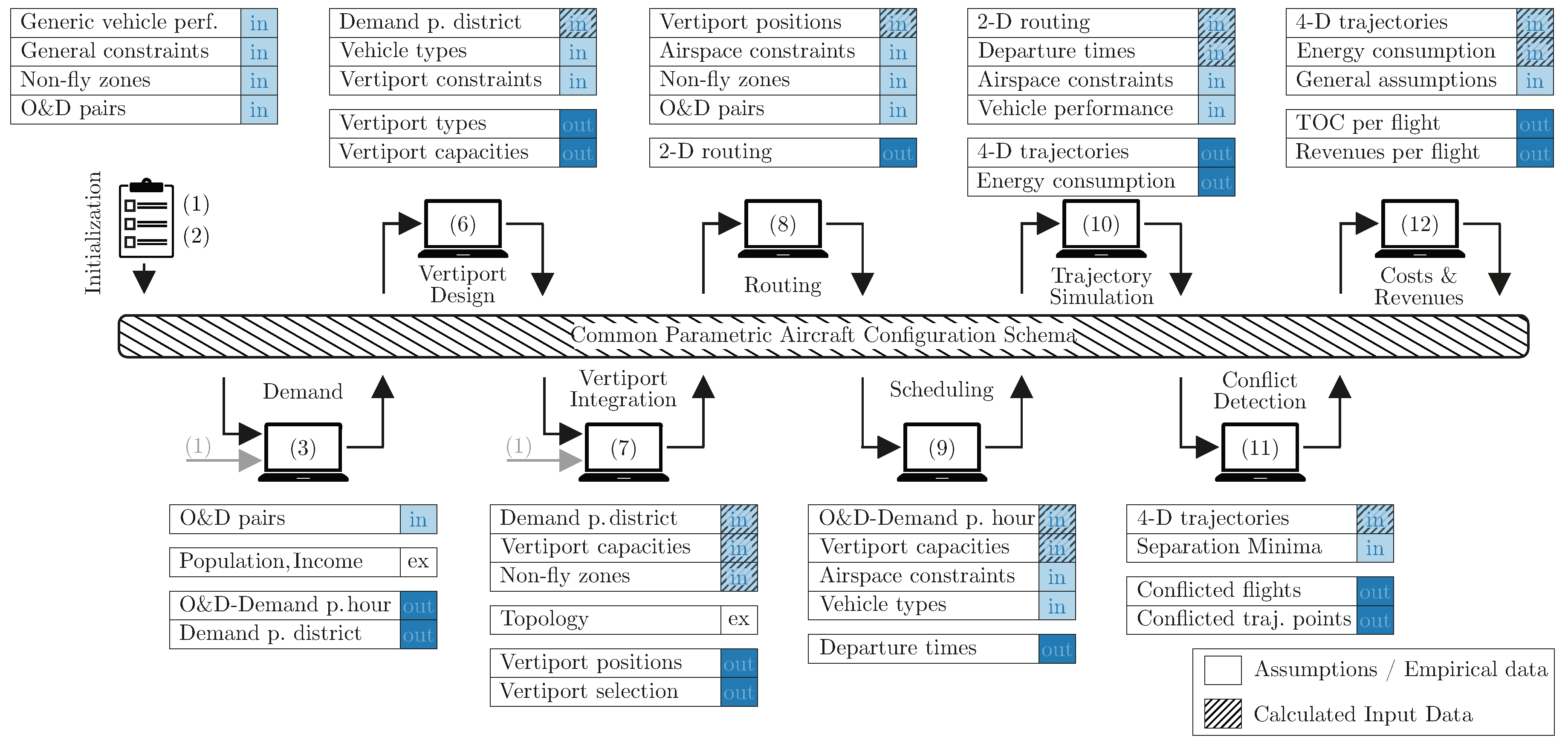
Section 3.8, are applied for the simulation of a generic on-demand air taxi concept in the metropolitan area of Hamburg. An overview on CPACS interfaces of current components is provided in
Figure 9. Calculated data are marked by hatching; all other data are either based on assumptions (vehicle performance, vertiport constraints, etc.) or on empirical observations (topology, population and income distribution of Hamburg City). Once an adequate methodology of consideration for these datasets is developed, it is possible to transfer this UAM modeling approach to other metropolitan areas.
3.2. Urban Air Demand Modeling (U-CAST)
The implementation of UAM concepts will fundamentally expand urban mobility and might lead to considerable changes in the demand for individual means of transport. The choice of the traffic mode is strongly influenced by travel costs, travel times and comfort aspects (number of transfers, distance to station, etc.) as well as individual mobility preferences. A multi-modal modeling approach that covers different target groups is therefore essential for forecasting UAM demand. Another challenge of UAM demand modeling is indirect implications like relocation effects. Since the average daily time budget spent by a person for commuting has remained unchanged for decades (Marchetti’s constant) at about one hour [
44], every acceleration of the transport system has led to an expansion of the radius of action. As a consequence, commuting distances and leisure routes increased in the past with higher travel speeds—an effect that will most likely also occur for UAM systems if UAM’s share of the total transport volume reaches a certain level.
An initial estimate of the UAM demand is carried out, i. a., by [
15,
16,
17,
18,
19]. Based on a survey, the willingness of commuters to pay for UAM was estimated in five US metropolitan areas by [
15]. Future markets for interurban air mobility (up to 300 km) were analyzed worldwide by [
16]. Therefore, they integrated a gravity model into the existing DLR air passenger demand forecasting model D-CAST [
45,
46], which simulates the number of passengers as well as changes in the number of connected cities between 4435 settlements worldwide based on various socio-economic scenarios. For simulating mobility preferences, an agent-based approach was proposed by [
18,
19], who extended the multi-modal transport simulation MATSim for UAM services. In their current version, the UAM extension provides UAM infrastructure, vehicles, and airspace usage.
Within this study, a simplified UAM demand forecast model (U-CAST) is developed, which is derived from D-CAST [
45,
46]. In the current modeling phase (January 2020), the general UAM mobility demand between two districts is modeled as a function of the population and income distributions, district type classification, key indicators of everyday mobility in Germany [
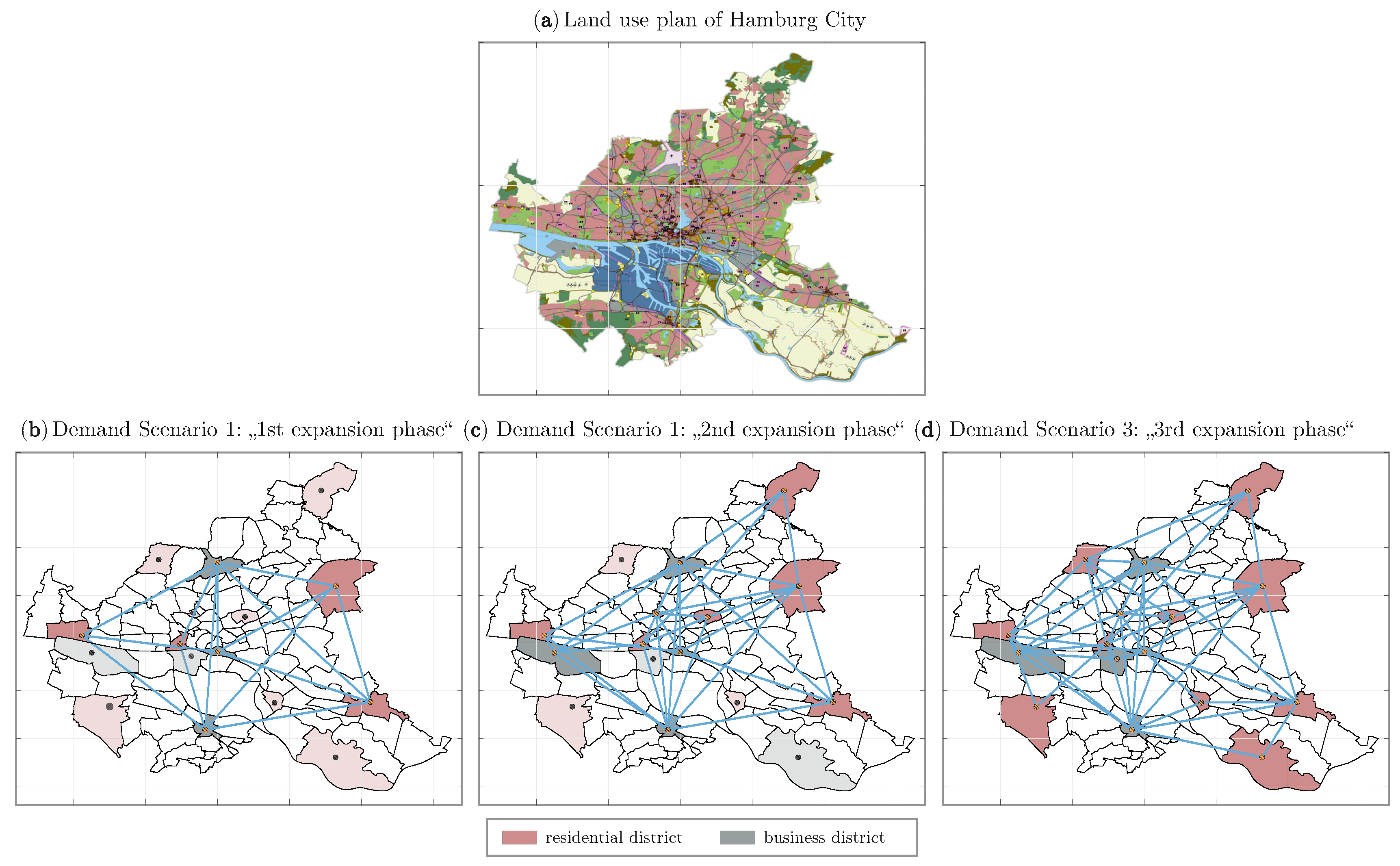
47], and the UAM travel time saving potential relative to alternative modes of transport. Therefore, an urban database of Hamburg was set up, which contains information on the topography, population and income distribution of all 104 districts of Hamburg City (see
Figure 10a) [
48,
49].
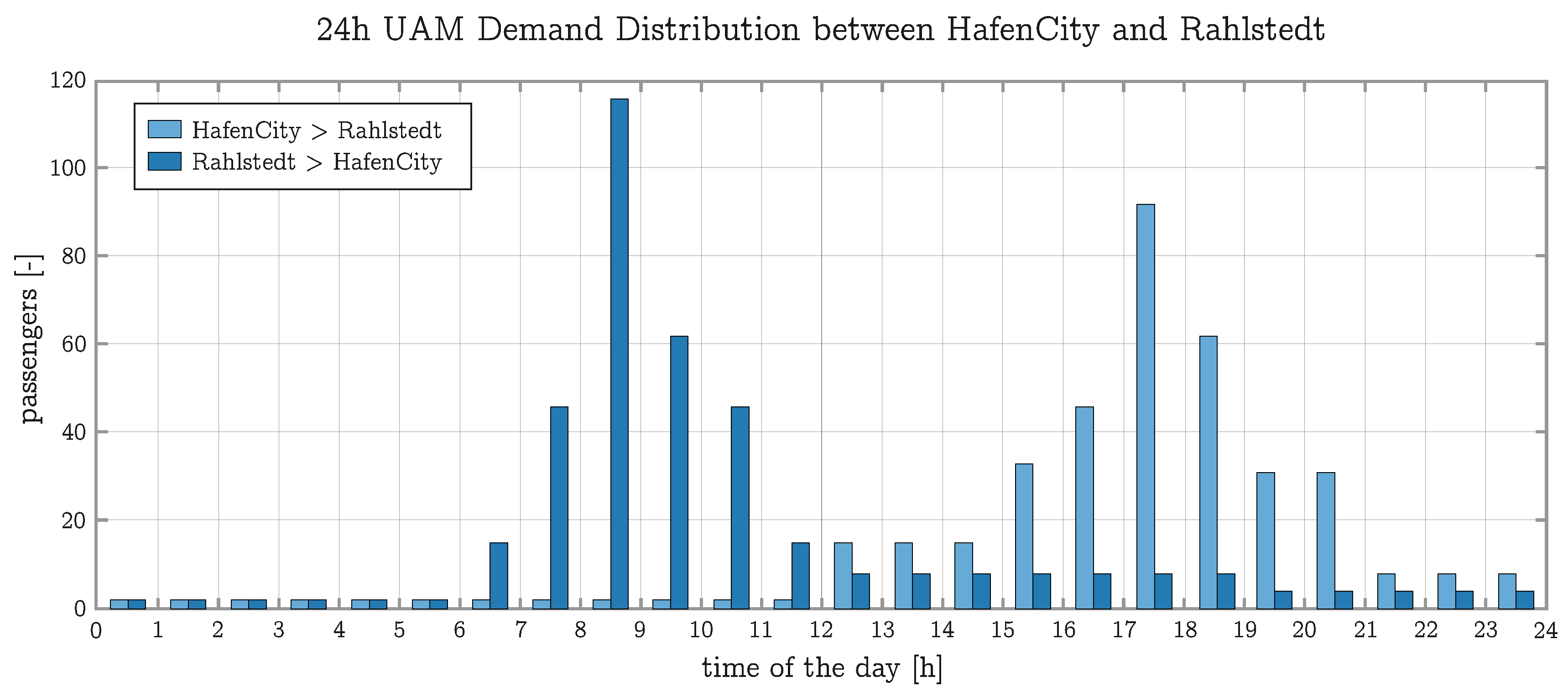
Since the planned UAM simulation is based on a 24-hour period, the resulting UAM demand of each route must be broken down to an hourly basis. In order to roughly estimate the number of arrivals and departures for the individual districts over the day, a categorization parameter is introduced for different types of districts (working district, shopping and nightlife district, residential neighborhood, etc.). Categories other than “working quarters” and “residential areas” are not yet included within this study (see
Figure 10). Traffic peaks are generally assumed in the morning or evening hours. For an exemplary district, which is assigned to the category of a working district (e.g., “HafenCity”), the possible air traffic is assumed to be mainly incoming in the morning hours, when people come to work, and outgoing in the evening hours, when people return to the living quarters. For a “residential neighborhood” (e.g., “Rahlstedt”), it is vice versa (compare
Figure 11).
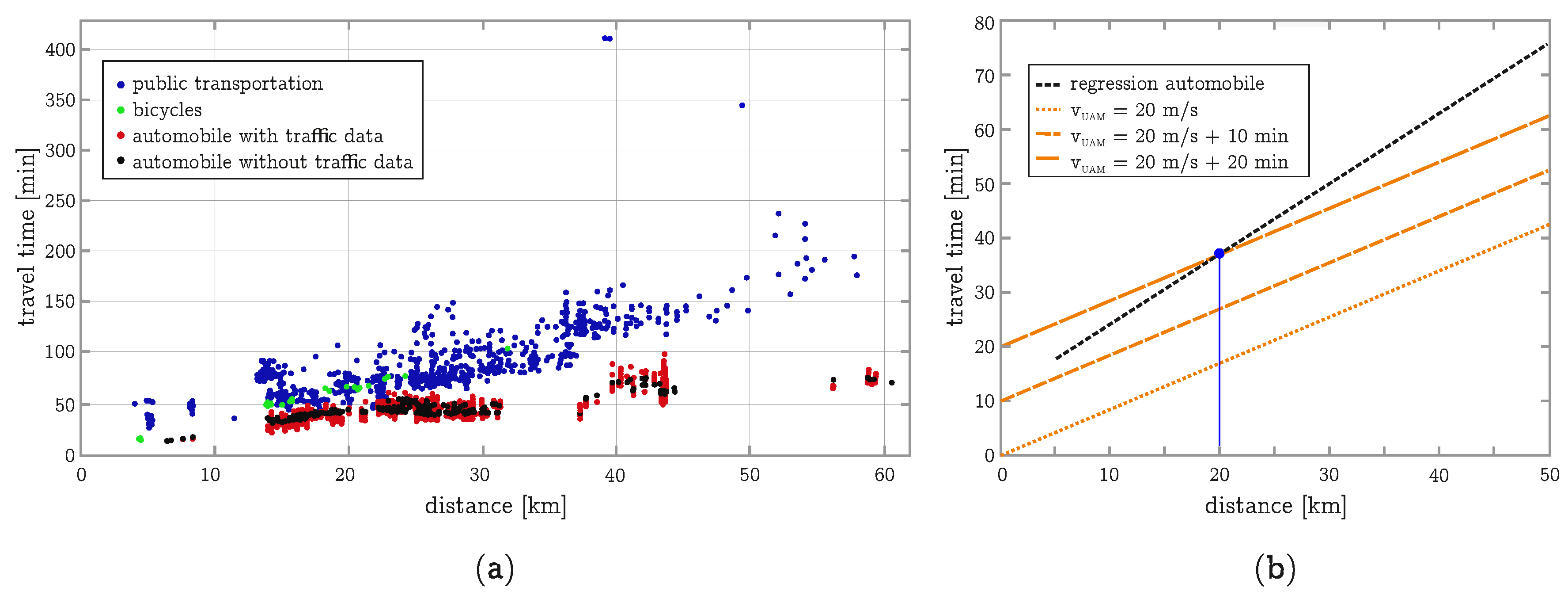
To simulate the UAM time saving potential, an automated query of “Google Maps” was created by [
51], which provides information such as travel times and distances for different modes of transport [
52]. The automated query was carried out for different traffic modes (automobile, bicycle, public transportation) on selected routes every 15 minutes within a one-week period in 2018 (see
Figure 12a). The query was carried out from 30 July 2018 to 6 August 2018 during a particularly hot and dry summer in Hamburg City. The empirically obtained travel time data were used to derive a linear regression for each transport mode. Since many people go on holiday in August, travel times (especially by car) might be underestimated. As an example, the linear regression of the travel time (
) as function of the travel distance (
d) is given in Equation (
1) and visualized in
Figure 12b:
In
Figure 12b, the estimated UAM travel time is depicted under the assumption of a comparatively low average cruising speed of 20 m/s (no consideration of take-off and landing phases). This leads to considerable time savings (orange dotted line). If a time expenditure of 10 min is added to cover take-off, landing and turnaround, there would still be a considerable time saving potential on almost all the routes. For a time expenditure of 20 min, a time saving potential exists for values of distance beyond 20 km, as highlighted by a blue mark in
Figure 12b. The presented simulations, however, are carried out with a higher cruise speed of 30 m/s.
In the following sections, three different UAM scenarios are discussed, which vary in their number of connected districts, routes, and passengers (see
Figure 10 and
Table 1):
A first plausibility check of the results was conducted according to data from the Statistical Office for Hamburg and Schleswig-Holstein [
53]. According to [
53], 14.2 million taxi journeys were made in Hamburg in 2016, which corresponds to an average of 38,900 journeys per day. If we assume that each of the taxis carries 1.2 or 1.5 passengers on average, our UAM scenarios would lead to equivalent shares according to
Table 2.
3.3. Vertiport Design and Integration
Design of the vertiports and their integration plays a crucial role for the acceptance and potential success of UAM concepts. There are several aspects that are influenced by the design and allocation of ground infrastructure, such as: trip times, UAM costs, noise exposure, etc. The design and physical dimensions are primarily determined by the vehicle. In this study, we focus on VTOL (Vertical Take-off and Landing) vehicles, since STOL (Short Take-off and Landing) vehicles—even with ambitious climb performance—have significant space requirements as shown e.g., in [
54]. The required space, especially in populated areas, would have significant impact on the ticket price due to land prices, if the land is available at all. On the other hand, runway orientation is determined by prevailing wind conditions and has a substantial impact on the availability of UAM services.
With respect to vertiport design, the space requirements are estimated following the design of helicopter landing pads. In a first approach, the UAM network might use existing landing pads [
55]. From the authors’ point of view, this concept will not provide the capacities necessary to meet the traffic numbers envisaged for UAM—mainly because the landing pads provide—if at all—a limited number of parking positions. Basic requirements on land use for landing pads and parking positions are described in [
56] based on helicopter regulations. An integrated approach for the derivation of vertiport space requirements on the basis of a conceptual vertiport capacity model (including number and layout of touchdown and lift-off pads, taxiways, gates, and parking pads) is given in [
28]. For UAM, in order to meet the envisaged capacity, there are more futuristic concepts under investigation (see i. a. [
57]).
In this study, two models for vertiport design and integration are described:
“Level 0”: In this approach, the vertiport is not modeled in its physical dimensions, i.e., vertiports are modeled as a single source (or sink, respectively) with a defined capacity
“Level 1”: In this approach, the model consists of two submodels: the vertiport design component and the vertiport allocation component. As a result, the vertiport(s) are allocated in an urban environment according to the dimensions of the vehicle. Capacities of the vertiports and expected traffic movements define the number of vertiports needed.
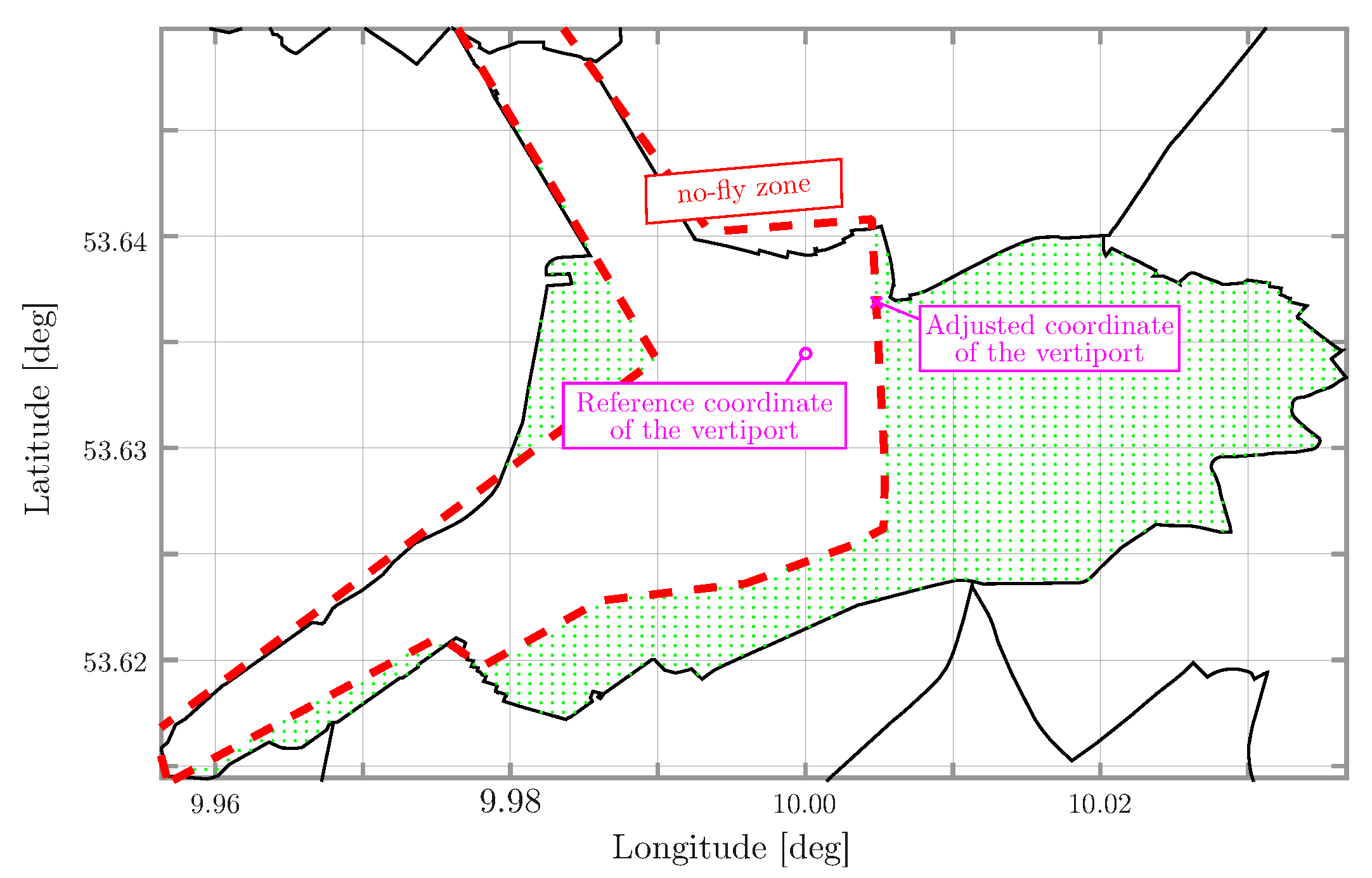
“Level 0” approach: The simple approach (Level 0) models vertiports as a single point with defined (e.g., infinite) capacity. Under the assumption that demand is provided for a specific area, e.g., a district of a city, the model allocates the vertiport at the center of gravity of the area covered by this district. In
Figure 13, this point is labeled as “Reference coordinate of the vertiport”. If the coordinates are within a restricted airspace, labeled as “no-fly zone” in
Figure 13, the point is shifted outside with minimum distance to the reference point.
“Level 1” approach: The UAM toolkit currently consists of two infrastructure components, a vertiport design tool (component 6 in
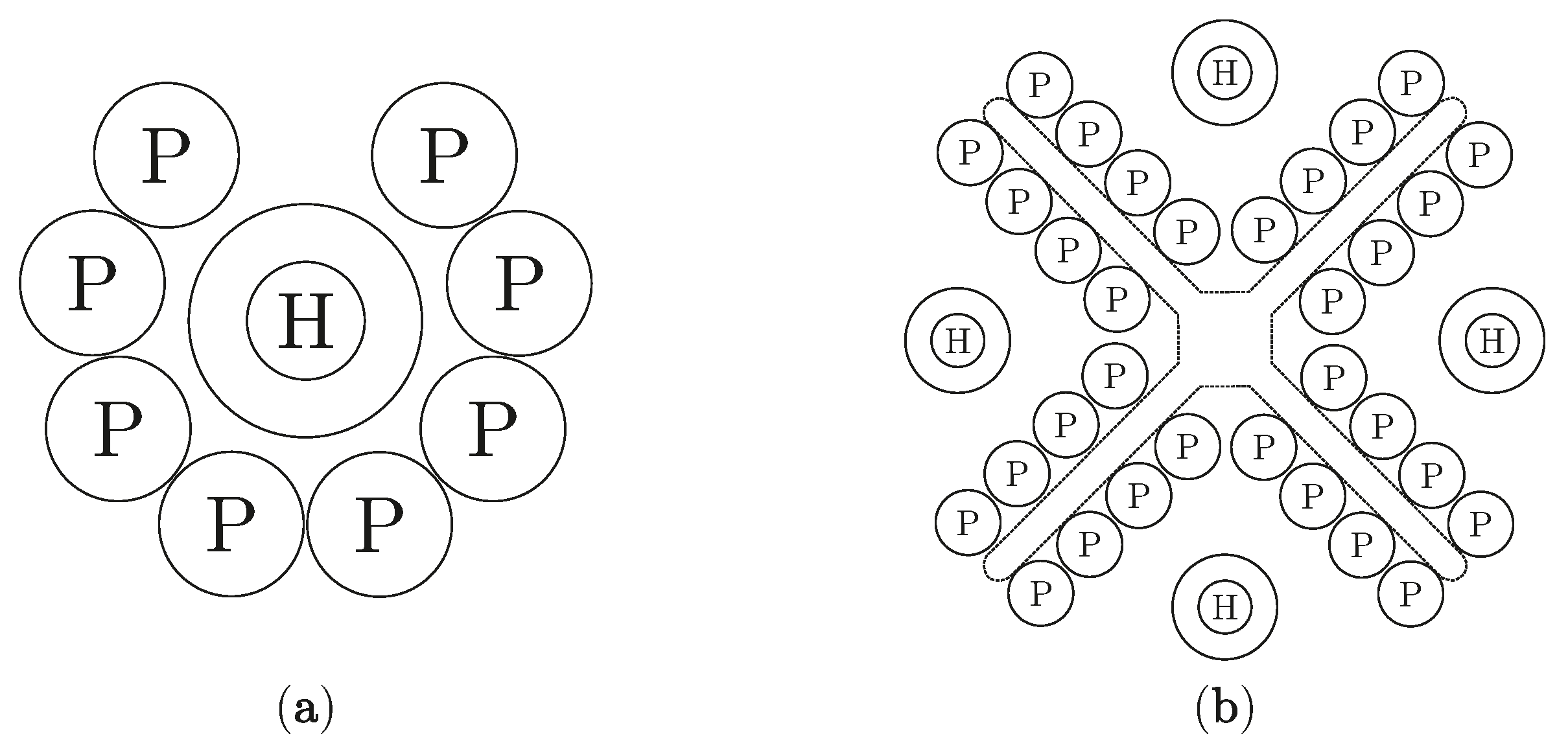
Figure 8) and a vertiport integration tool (component 7). The Vertiport Design component calculates the available capacities (maximum possible number of take-offs and landings per hour) for different vertiport concepts as well as the space requirements and land use required based on vehicle-specific parameters (e.g., the dimensions of the aircraft), simplified turn-around processes and the number and arrangement of parking (
) and take-off positions (
; so called vertipads). In the overall UAM simulation, the component can therefore be used to answer the question to what extent the optimum number of parking positions per vertipad is influenced by the operating concept (compare [
28]). Two exemplary vertiport arrangement options are shown in
Figure 14 for a vertiport (H) with
take-off and landing areas and
parking positions (P).
The Vertiport Integration component deals with the research area of the spatial distribution of take-off and landing sites (so-called vertiports) within the individual districts. For the Hamburg metropolitan region, the State Office for geo-information and surveying provides 3D building data with varying degrees of detail [
59]. These data are available in the form of individual files for defined regions. Depending on the demand situation and the aircraft characteristics, the 3D data are used for a first identification of potential take-off and landing sites. Nevertheless, a manual check of the current status of landuse (municipal park, playground, parking sight, etc.) is still required.
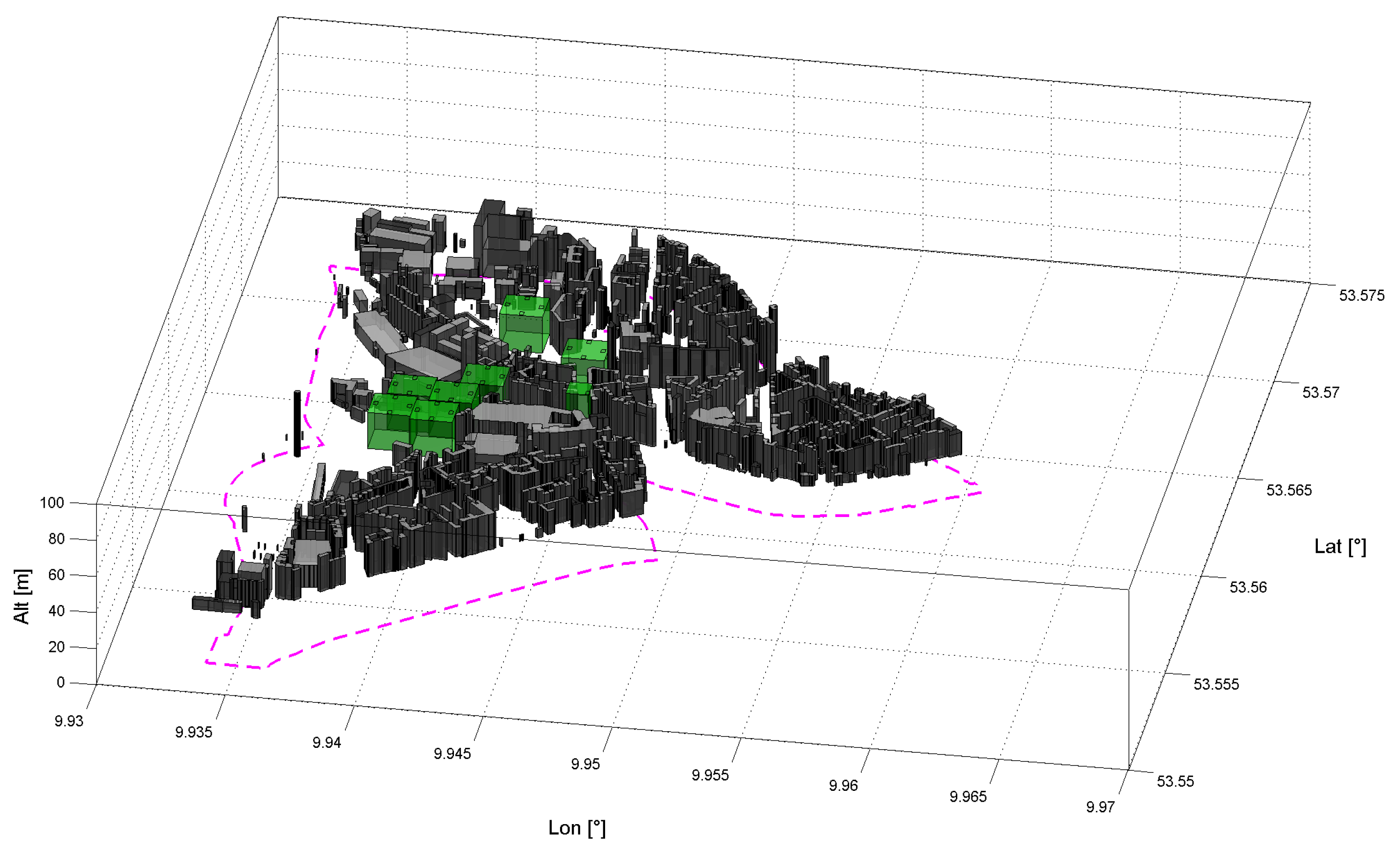
For the district “Altona-Nord” and a fictitious demand situation,
Figure 15 exemplarily shows identified locations for possible vertiports locations, depicted as green cuboids. The demand for take-offs and landings can be covered by seven vertiports with four vertipads respectively, marked as squares, as well as one smaller vertiport with only one vertipad. At present, it is assumed that the construction of Vertiports will be carried out in specially designed, newly erected buildings. This means that the use of existing buildings (e.g., use of space on larger buildings) is not represented in the overall simulation at this stage. In addition, open spaces (so-called Obstacle Clearance Zones) around the Vertiports are not considered yet.
These assumptions would require vertical approach and departure routes as well as corresponding position and navigation accuracies, which must be met by the aircraft systems. Furthermore, the integration of further databases with information on traffic routes, waterways, nature reserves, etc. is necessary and the subject of current work. In addition, atmospheric effects as turbulence and wind gust and their interaction with urban topography might be important subjects for vertiport positioning, as well as downwash and its backlash from buildings. In the next steps, corresponding vertiports in commuter catchment areas such as Lüneburg, Bad Segeberg, and Buxtehude will also be designed in order to represent the expected traffic flows realistically. Here, we assume an on-demand UAM concept in which all vehicles fly along defined urban flight routes. The first step in defining these urban flight routes is to specify the individual position of the vertiports (as sources and sinks of the urban air transport system). At the current stage of simulation, a single reference point per quarter of Hamburg is assumed as take-off and landing coordinates. The general position of the reference point is defined as the centroid of each quarter, if there is no conflict with a no-fly zone. Otherwise, the reference point is relocated to the closest feasible position (see
Figure 13). To avoid capacity bottlenecks of the ground infrastructure during the first simulation run, the number of start and parking positions of each vertiport is assumed to be infinite.
3.4. Urban Air Routing
An established concept of airspace organization in conventional aviation is given by ATS route networks, which are defined by sets of waypoints and directed connections in between. The movement of aircraft along these designated routes enables a channelized air traffic flow and therefore helps maintaining spatial separation for collision avoidance. Nevertheless, the concept was originally developed for aircraft with fixed wings rather than for rotary wings. The latter show significantly different flight performance and therefore have their own requirements, as they fly with lower speeds and are capable of hovering and starting vertically. It is recommendable to adapt airspace organization structure to the properties of the new vehicles and to the capabilities of the latest airspace monitoring and guidance technologies. Especially in the light of a shared use of urban airspace by PAVs (Passenger Air Vehicles) and UAVs (Unmanned Air Vehicles) in the future, it seems mandatory to develop new procedures in order to meet the requirements due to the presumed high densities.
In the course of previous investigations, several concepts were proposed in order to organize urban airspace for high density use by PAVs and UAVs, as presented in [
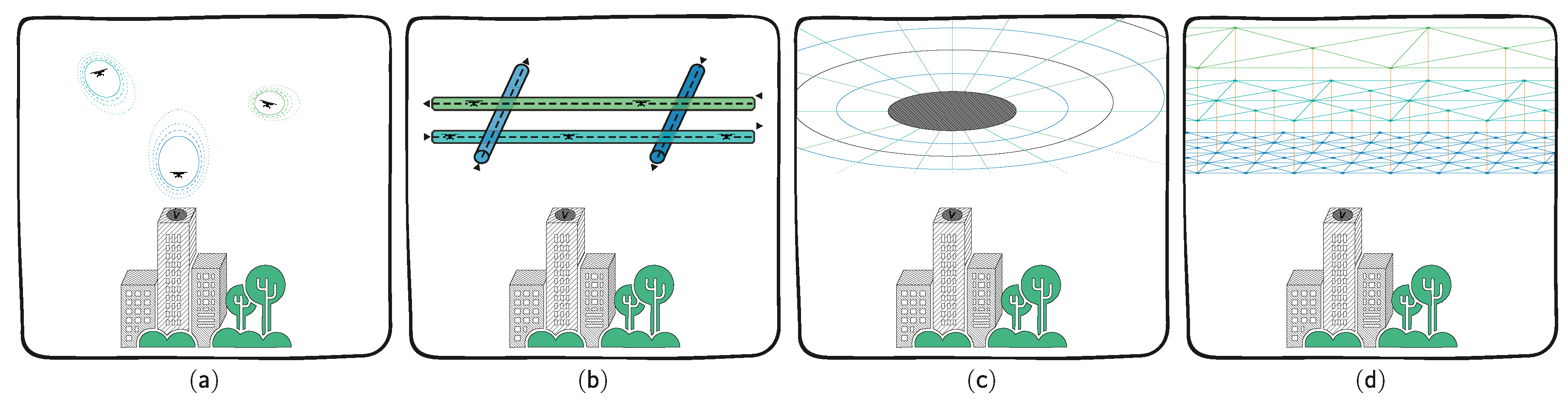
21]. A feasible option is a Free-Flight-inspired concept, which—aside from physical constraints—allows a free choice of flight velocity, altitude, and flight track. Such a concept holds high potential for flight movements to reduce energy consumption due to optimized tracks; nevertheless, it requires high efforts in airspace monitoring and conflict management throughout all phases of flight. A suitable approach for implementation is presented in [
22], which proposes a density-based airspace management system that opens up the airspace equally for lowly-equipped and highly-equipped UAS by assigning a safety ellipsoid to each airspace user. As the size of this ellipsoid (see
Figure 16a) is depending on navigation, communication and the capability to detect other airspace users (cooperative and uncooperative), the concept creates an incentive for manufacturers and operators to invest in performance-related technology without excluding poorly equipped airspace users from entering the urban airspace.
Another airspace organization concept is based on the idea of the hemispheric rule, which has been applied in aviation for decades. It assigns altitudes to the aircraft depending on its bearing, focusing the main traffic direction on each flight level and therefore reducing the potential of conflicts (see
Figure 16b). A similar concept is represented by division of airspace into radial and concentric zones, in which the traffic is channelized regarding the direction of flight. The latter two options both have a limitation of degrees of freedom in trajectory design in common, affecting the possible efficiency for an increased safety. The last presented option is the introduction of an urban grid of waypoints with multiple layers in altitude. In order to take increasing travel speeds with higher altitudes into account, the mesh size between the nodes is increasing with the level of altitude.
In the course of this study, the airspace is organized in a fixed route network between selected origin–destination pairs (see
Section 3.2). In accordance with [
60], zones with limited permission of air traffic operation have been identified for the city of Hamburg, so called no-fly zones, depicted as red polygons in
Figure 17 that were primarily chosen for reasons of safety concerns (airports of Hamburg, industrial sites and power plants, crowded public facilities like football stadiums, etc.) and represent a preliminary selection that might be expanded in future revisions—for instance, taking criteria as noise into consideration.
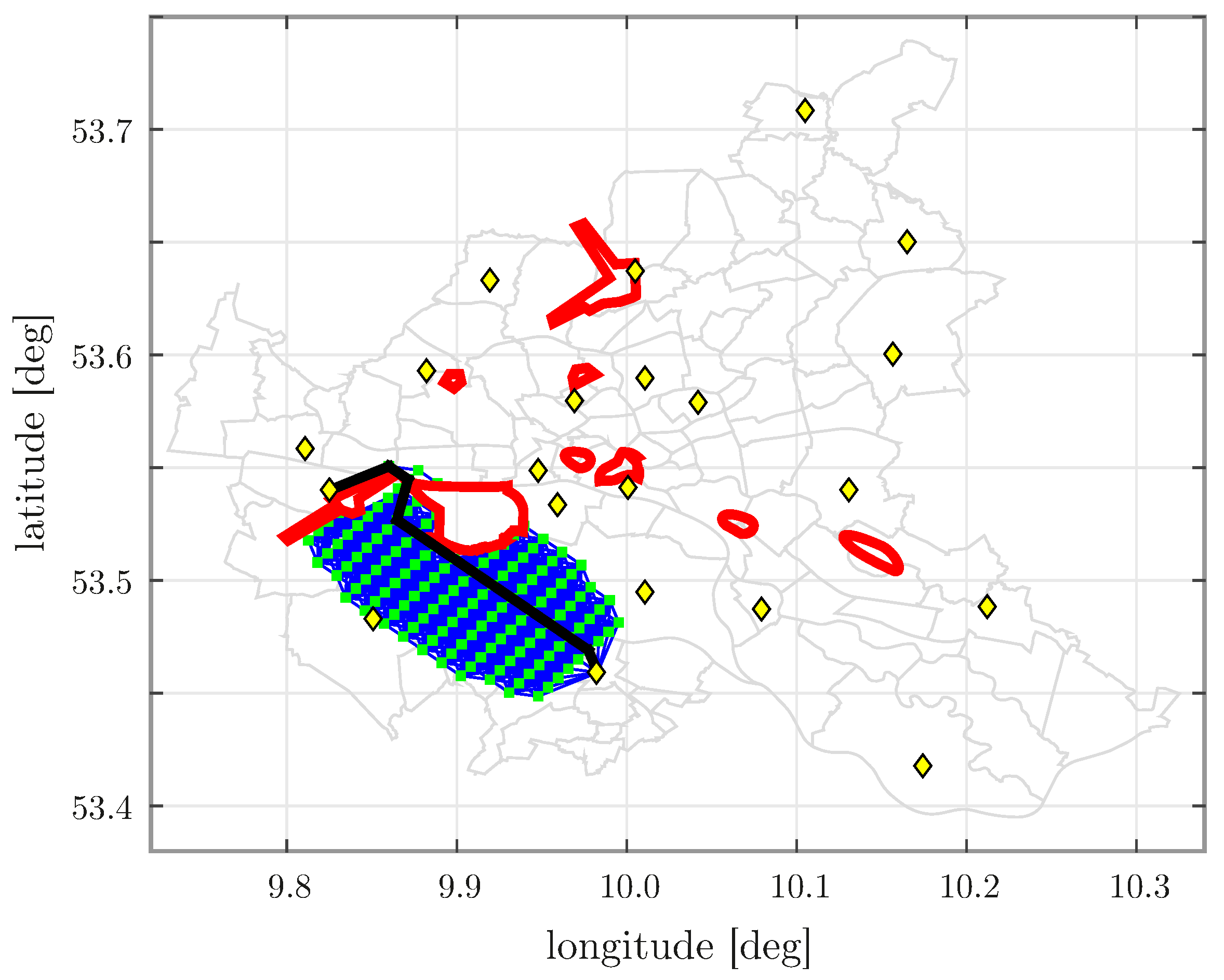
Since there are no atmospheric effects such as wind taken into consideration, the lateral tracks avoiding the no-fly zones can be determined and used permanently throughout this study. In order to find the respective optimal routing for each specific origin–destination pair (OD), a set of potential waypoints (green diamonds) is created, which are connected by edges (blue lines). This graph generation is carried out according to the method presented by [
61]. In a first step, the orthodrome is calculated between origin and destination, waypoints are generated in intervals of 1000 m ground distance along the track. Subsequently, in each of these potential waypoints, a node array is generated perpendicularly to the direct connection OD, such that the maximum detour from origin to destination via the outmost node is up to 6% higher than the direct connection. As a result, an area is obtained which is applied as search space for the optimal track. All nodes and edges crossing one of the defined no-fly zones are detected and eliminated from this graph, before applying a Dijkstra-Algorithm [
62] in order to find the shortest lateral path through the search space. In order to avoid collisions between oncoming and intersecting vehicles, lateral tracks are shifted vertically according to a “quadrocircular rule” (see
Section 3.6 and
Figure 16b).
Currently, tracks are determined individually per OD pair; interactions between OD-specific tracks are not yet taken into account. This issue could be addressed by defining a global search space (generic grid, compare
Figure 16d) in combination with an agent based simulation, implementing an active collision avoidance.
3.5. Flight Planning/Scheduling and ATM
In the context of UAM, there is no common understanding for flight planning and scheduling yet. Nevertheless, several sub-functions and domains of air traffic management (ATM) are related to this area—for instance, trajectory and separation management, (dynamic) airspace management and flight rules according to specific UAV mission definitions. The focus of this study is on creation of schedules for urban flights (flight plan preparation and registration) as well as their surveillance in an urban area itself (see
Section 3.7).
As air taxi services are expected to be provided “on call” at short notice (“On-Demand-Service”; see
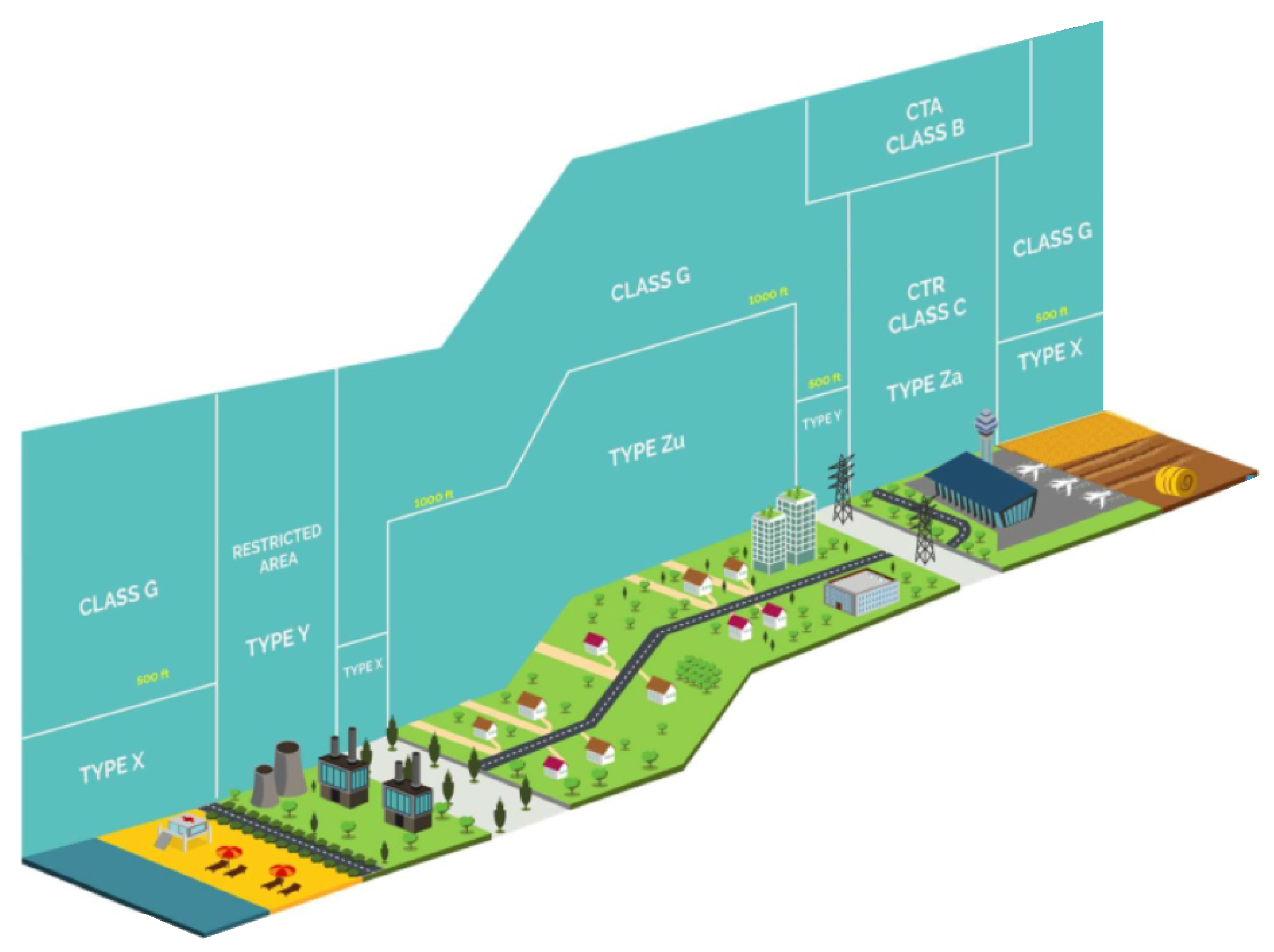
Section 3.8), a flexible and efficient short-term mission management is one of the main requirements of UAM. Unmanned tasks such as search and rescue and cargo transport within a metropolitan area show similar requirements. Even though On-Demand UAM is linked to an ultra-short planning phase—in contrast to conventional aviation—a flight plan is mandatory according to the Standardised European Rules of the Air (SERA) [
63] for all flights that are classified to airspaces with the corresponding risk category ‘Y’ (high) and ‘Z’ (highest; see
Figure 18). These categories require safety-critical, access-controlled services or advisory notices. For the highest risk classification for instance, a conflict resolution is needed before flight and in flight.
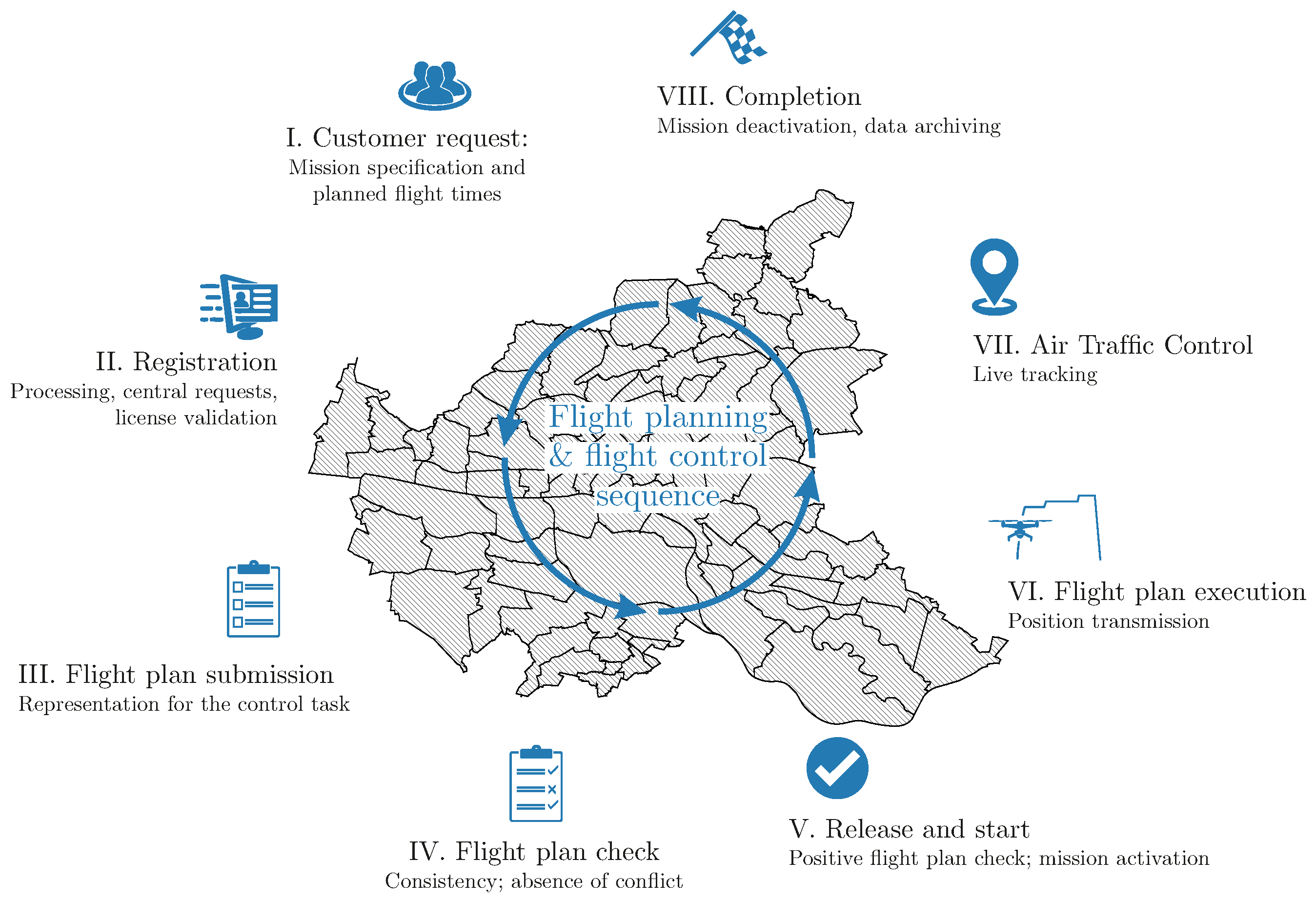
In order to check the alternating flight plans of the whole UAM system continuously, a processing step of the operational plan is required in addition to the tasks of modern Air Traffic Flow Management. A possible mission-related flight planning and control sequence is shown in
Figure 19. This comprises eight steps, which describe all necessary sub-steps from customer request for a mission task and completion of the mission: (i) customer inquiry, (ii) registration, (iii) task flight plan, (iv) flight plan check, (v) clearance and take-off, (vi) flight execution, (vii) flight control, and (viii) flight termination and closure.
A high-level overview of NASA’s initial airspace integration concepts is provided by [
20]. To address UAM airspace integration barriers, NASA plans to investigate different procedures for congestion, disruption, and separation management. In addition, research work will be carried out on interoperability and on implementing a continuous network-wide scheduling. A sequencing and scheduling algorithm for on-demand UAM arrivals is introduced, i. a., by [
25,
32]. For separating eVTOLs safely and with minimal delay [
25], a mixed-integer linear program was utilized that calculates the optimal required time of arrival, taking into account the remaining battery charge and vertiport capacity. In [
32], a highly-autonomous resolver algorithm that was originally designed for traditional aviation, was adapted to UAM-specific vehicles, missions, and conflict resolution.
Within this study, a simplified UAM scheduling tool (component 9) is developed. This tool creates a network-wide flight plan for the route structure described in
Section 3.2 and
Section 3.4. As a first step, the estimated 24-hour UAM demand distributions of each route (input from component 3; see
Figure 8 and
Figure 11), is broken down into separate flight movements. Relating to
Figure 19, this step can be referred to block I: customer request. For this purpose, time windows for take-off on an hourly base for sequenced flights are generated for each route in accordance with the given minimum separation restriction and a maximum separation time needed to successfully allocate all requested flight movements planned within this hour. Here, we apply arbitrary separation minima of 600 m in horizontal and of 50 m in vertical dimension; temporal separation standards are not yet implemented (see
Section 3.7). Relating to
Figure 19, this step can be referred to block II and III: registration and submission.
In the current version, the UAM demand is allocated to a minimum number of vehicles resulting in maximum values of seat load factor (LF). Nevertheless, if demanded, flights are also scheduled for requests of single customers. As the simulation considers solely one aircraft type (with four seats), the occurring values of LF vary in a range of 25–100%, which influence revenues of ride-sharing services (see
Section 3.8). The choice of the vehicle class (regarding its passenger capacity) therefore has a major influence on the choice of the UAM pricing system (
Section 3.8) and the UAM demand (
Section 3.2) according to its price elasticity. This correlation is planned to be considered in the UAM system modeling (see outer iteration in
Figure 6 and
Figure 7).
The second step of the tool is the allocation of an explicit vertiport departure time (“available slot”), which corresponds to block IV (flight plan check) in
Figure 19. If all slots are occupied in the requested time window for take-off, the flight will be delayed until either a free slot is available or a maximum defined waiting time is exceeded. In case of a successful allocation, the departure of the flight is determined stochastically within the selected time interval. Otherwise, the flight is canceled.
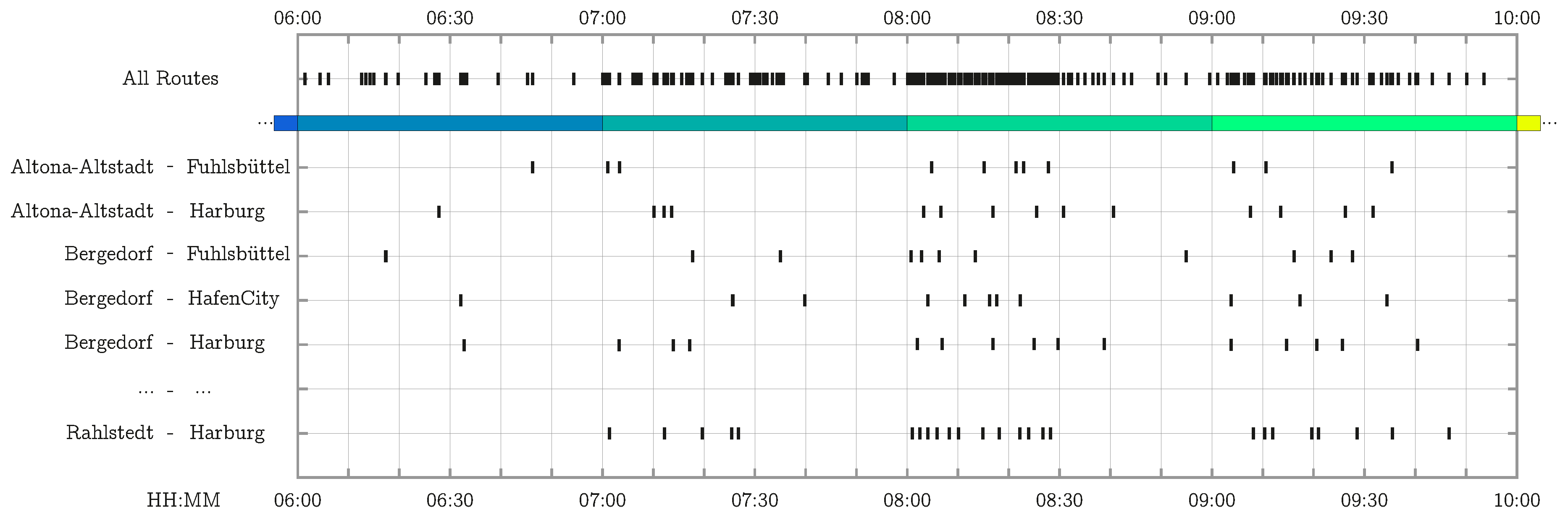
For the first UAM expansion phase, scheduled departure times are plotted in
Figure 20 over a time interval from 6:00 a.m. to 10:00 a.m.
As the capacity of all vertiports is assumed to be infinite, a reallocation of departure times is not necessary. The total number of flights of all UAM expansion phases is shown in
Table 3. In scenario 3, almost 2000 flight movements are scheduled for Hamburg City, which corresponds to an average of about 80 flights per hour.
For future works, it is planned to implement an agent-based simulation approach into the UAM system model for resource management, de-conflicting and viability assessment. Each agent is assumed to represent one vehicle that has a set of several properties concerning the location, availability, performance envelope, capacity and its current condition (energy level, maintenance cycle). Furthermore, this establishes the required simulation capabilities to assess the robustness of the modeled system. A degraded system being exposed to meteorological disturbing factors for instance, such as a locally occurring convective cell, could be assessed in terms of its remaining transport capacity and punctuality. In addition, possible counter measures with regard to limited predictability of such events should be object of investigation.
3.6. Flight Trajectories
The Urban Trajectory Calculation Module (uTCM) is a simplified tool extraction from the Trajectory Calculation Module (TCM) [
64], following a kinematic approach. Based on the tracks of the route network (see
Section 3.4), the four-dimensional trajectories are calculated by superimposing the lateral tracks with a standardized vertical flight profile. As depicted in
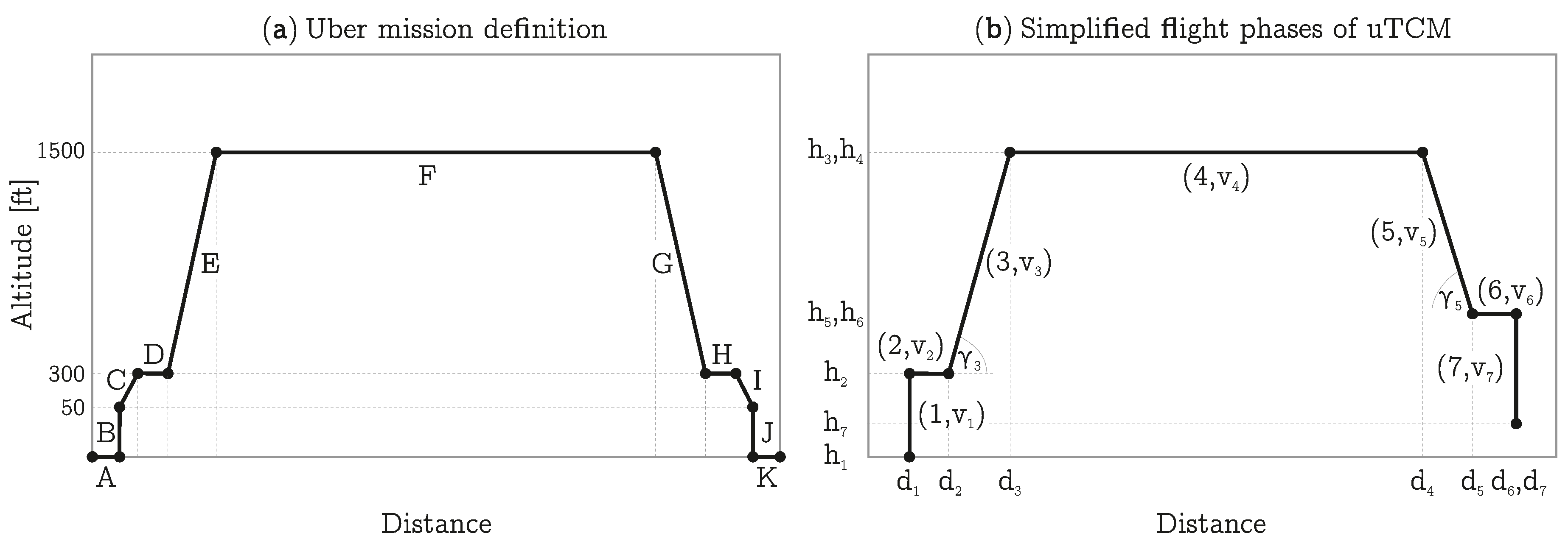
Figure 21b, the applied flight profile consists of seven generic flight phases, which are derived from the Uber mission definition for Electric Vertical Takeoff and Landing (eVTOL) aircraft operation (see
Table 4 and
Figure 21a) [
65].
The profile starts with a constant vertical speed
, inducing an initial climb phase (phase 1) from
to
in altitude, which corresponds to a combination of Uber flight phases B and C in
Table 4. After departure terminal procedures (phase 2, Uber phase D), the vehicle climbs at constant speed
and climb angle
to cruise altitude
(phase 3, Uber phase E). The cruise phase (phase 4, Uber phase F) is characterized by constant altitude
and cruise speed
. In order to determine the top-of-descent at the end of phase 4, the following phases are evaluated reversely (phases 5 to 7, Uber phases G to J) to their execution during a mission. In phase 5 (Uber phase G), the vehicle is directed to descend to altitude
at constant speed
with a flight path angle
. In future investigations, as soon as the simulation environment allows a consideration of procedures for ground handling and clearance for take-off and approach, an optional loiter phase (phase 6, Uber phase H) is planned to be part of the mission profile, in which the vehicle remains on constant altitude
at reduced speed
until permission for landing at the target vertiport (set on altitude
) is granted, depending on capacity modeling of the corresponding vertiport. In the course of these investigations, however, after reaching
, the vehicle directly descends (phase 7, Uber phases I, J) from
to
assuming a constant vertical speed
. Depending on the level of detail in vertiport modeling, the mission profile may be extended by ground taxi phases (A+K) in future revisions. Speed and altitude are chosen according to the vehicle definition (see
Table 5; compare
Table 4). Nevertheless, the applied values merely represent estimations and are not based on flight envelopes that were verified in terms of feasible performance data. Based on Regulation (EU) 2018/1139 of the European Parliament and of the Council, air taxies operated remotely or unmanned (fully automatic) will most probably be assigned to the EASA category certified with an MTOM of more than 150 kg. A specification for certified UAS is currently only available in draft form on the part of JARUS (CS-UAS) [
11].
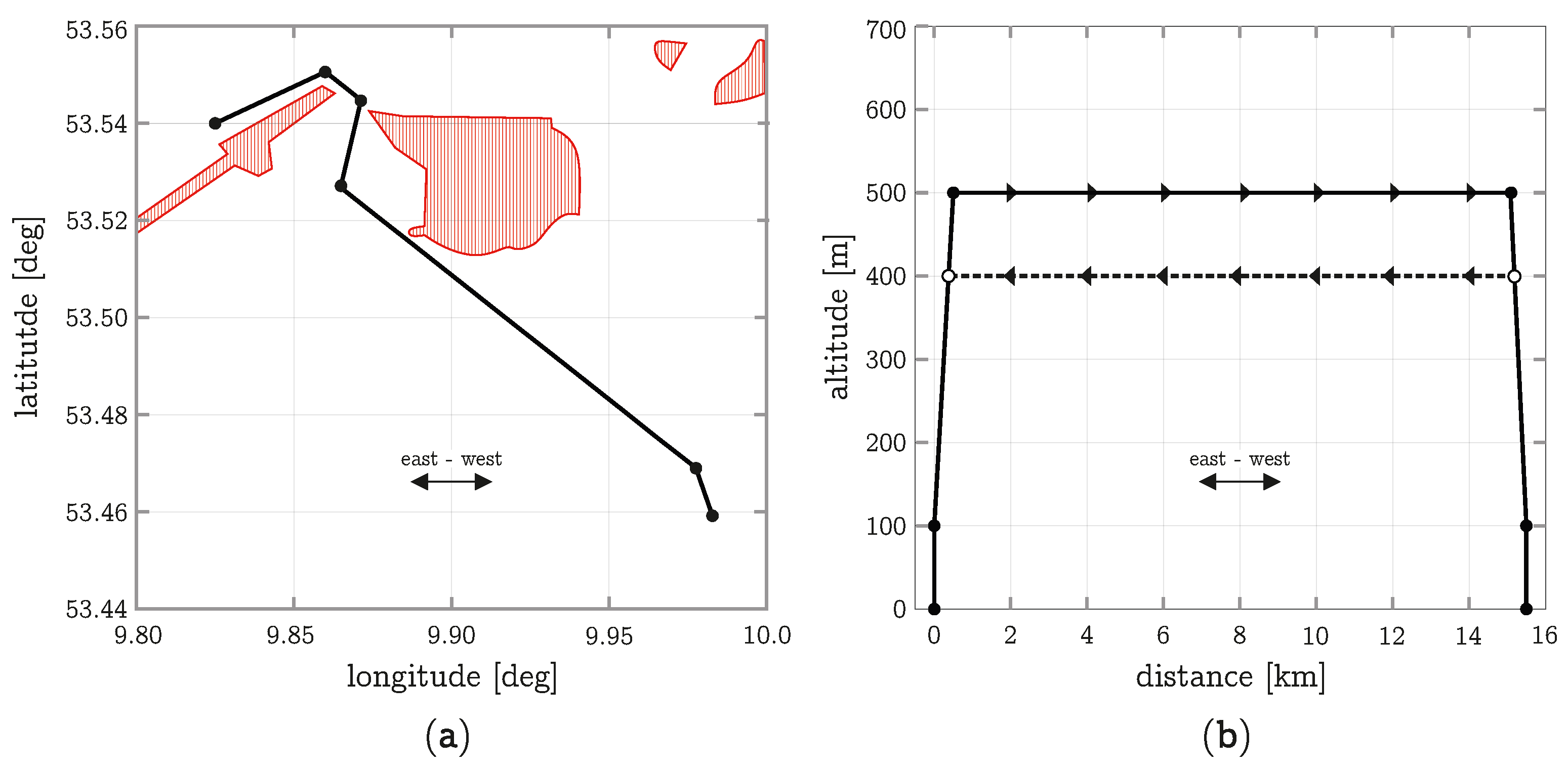
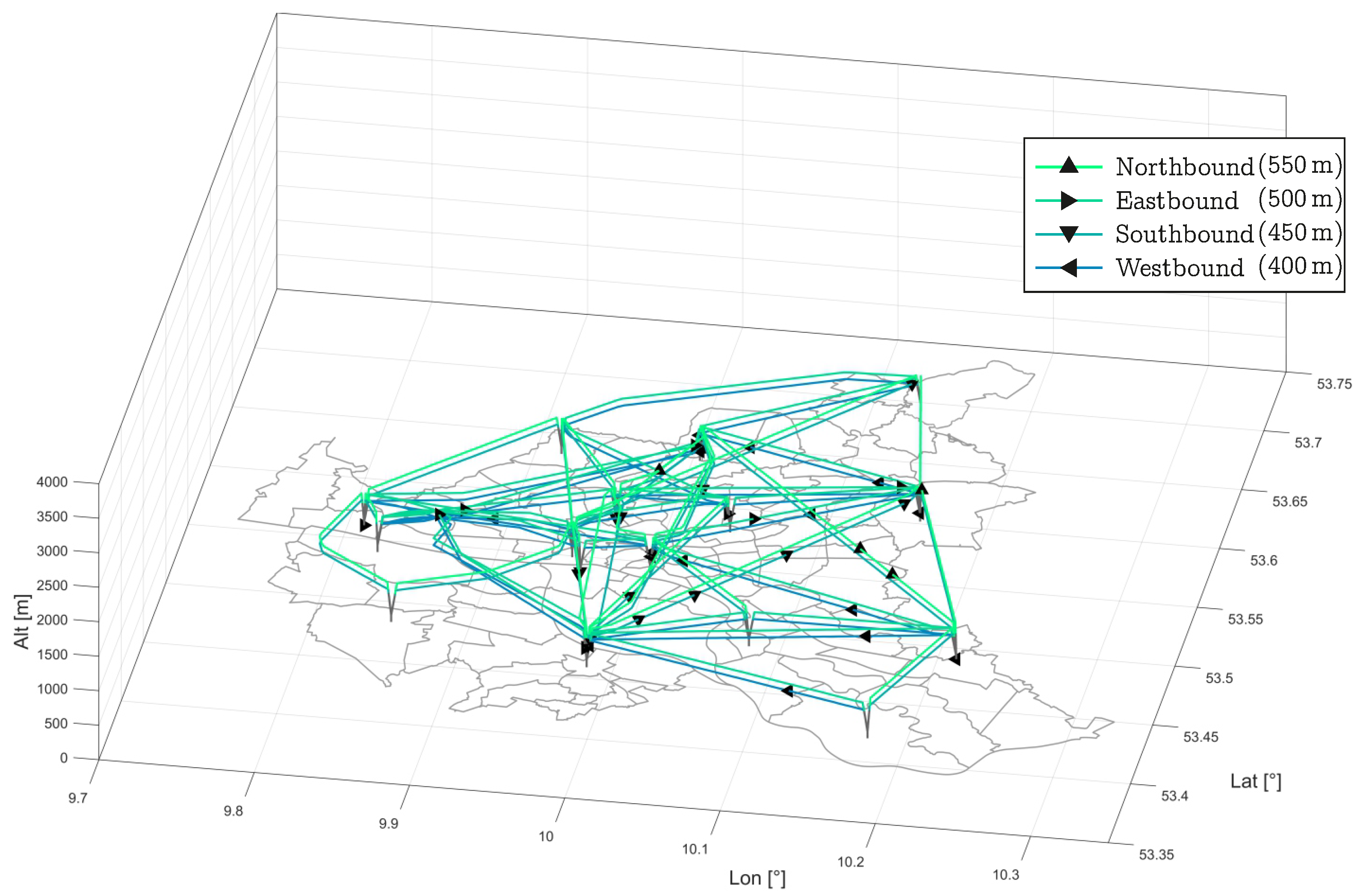
An exemplary vertical and lateral flight profile of the route from Hamburg-Finkenwerder to Hamburg-Harburg is shown in
Figure 22. The lateral path of the flight trajectory runs along the optimized route plotted in
Figure 17. In order to avoid collisions between oncoming and intersecting vehicles, the principle of the “quadrocircular rule” is applied as a basic measure, which defines a split of flight levels for North, East, South and West tracks, providing a minimum vertical separation of 50 m [
21]:
Northbound: Magnetic track 315 to 044 odd hundreds plus 50 m (here: 550 m)
Eastbound: Magnetic track 045 to 134 odd hundreds (here: 500 m)
Southbound: Magnetic track 135 to 224 even hundreds plus 50 m (here: 450 m)
Westbound: Magnetic track 225 to 314 even hundreds (here: 400 m)
A snapshot of the trajectory simulation scenario 3 (third expansion phase) is plotted in
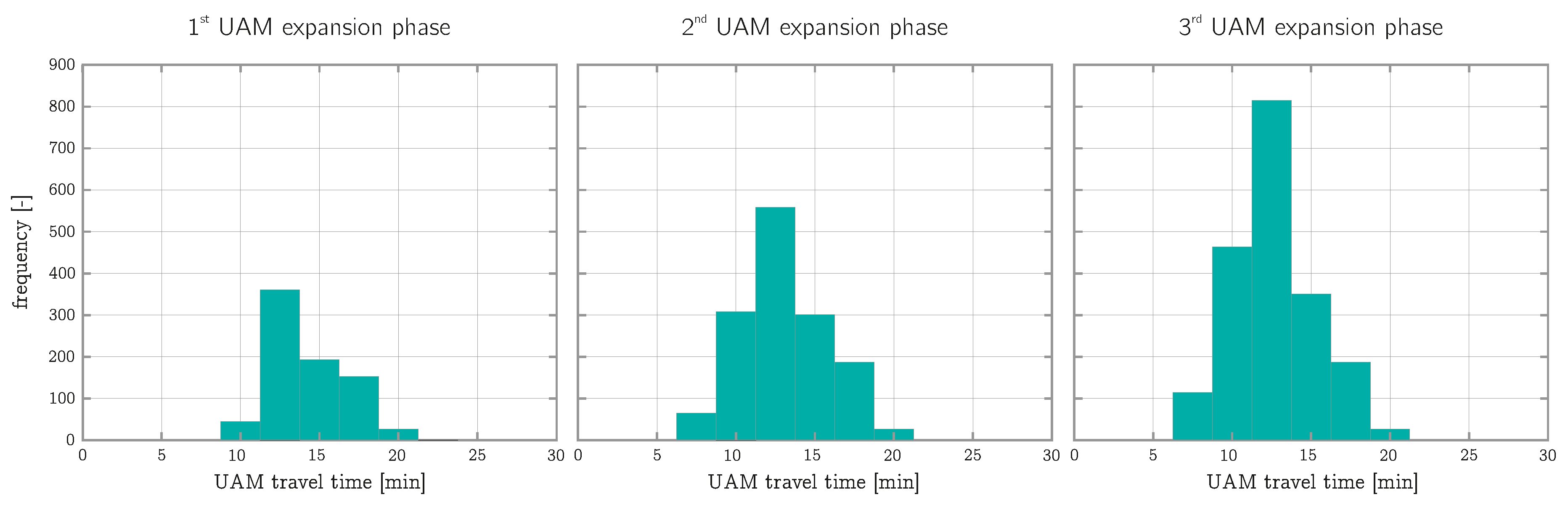
Figure 23. Each single vehicle is represented by a black triangle, which indicates the main heading of the flight, and moves along a specific route. In
Figure 24, the bar charts depict the frequency distributions of the resulting travel times for all scenarios. The average travel time is about 14 min per flight, whereas the mean distance is 12 km, which is significantly higher than the average distance of 6.6 km for taxi rides in Hamburg in the year 2016 [
53]. On the other hand, the mission distance is lower than design range of full electric drive vehicles, which is typically assumed to be in a range of 50–100 km.
3.7. Conflict Detection
The particular challenge in urban air traffic management is to safely manage a large number of vehicles in a congested and populated area. To avoid collisions in the air, urban air vehicles must be separated at all times, like conventional aircraft. However, due to substantial differences in vehicle performance and automation, existing ATM concepts [
66] must either be adapted for UAM or completely redesigned. Nevertheless, we assume that all conceivable UTM concepts require separation minima [
4], which should be small enough to enable dense traffic in urban areas and large enough to allow collision avoidance in case of loss of separation. A predicted loss of separation between two vehicles is considered as conflict that can either be prevented strategically by airspace design, or be resolved tactically by modifying the flight schedule and routing. The tactical options, however, might cause delays. A first sensitivity analysis on the impact of separation standards on the delay is presented in [
32], in which the separation standards, the sequencing specifications and the arrival planning horizon are varied in a network of 20 vertiports in the Dallas-Fort Worth metroplex. By reducing the spatial separation from 0.3 nmi to 0.1 nmi and the temporal separation from 60 s to 45 s, the total delay decreased by 7.3% and 28.4%. The number of conflicts decreased by 26% and 17%, respectively. A combination of variable and fixed (baseline) separation criteria is proposed in [
23]. An autonomous multi-agent algorithm with cooperative self separation, applied to a non-intersecting route network in New York City is presented in [
33]. This study investigates a network of route segments among seven vertiports, based on a horizontal separation of 0.3 nmi. However, the applicability of this approach to a large number of vehicles in a complex and congested network still has to be verified.
Within this study, a simple conflict detection component for UAM (component 11 in
Figure 6 and
Figure 8) was derived from the Network Flow Environment (NFE) Conflict Detection Tool [
67,
68]. The tool detects conflicts between planned trajectories (see
Section 3.6) based on different urban air traffic concepts and separation standards (toolinput from component 2). For efficient conflict detection, the urban airspace is partitioned into grid elements and only trajectory points of neighboring elements are analyzed.
Here, we apply an arbitrary separation minimum of 50 m (≈165 ft) in vertical direction and of 600 m (≈2 000 ft) in horizontal direction. The latter corresponds to a maximum time of 10 s for a collision avoidance maneuver between two head-on flights with a constant cruising speed of 30 m/s [
23]. Conflicts are detected above the minimum flight level of 400 m (≈1 300 ft) with a sampling time of one minute. Results are given in
Table 6 for the selected three scenarios and conflicting trajectory points are exemplarily plotted in
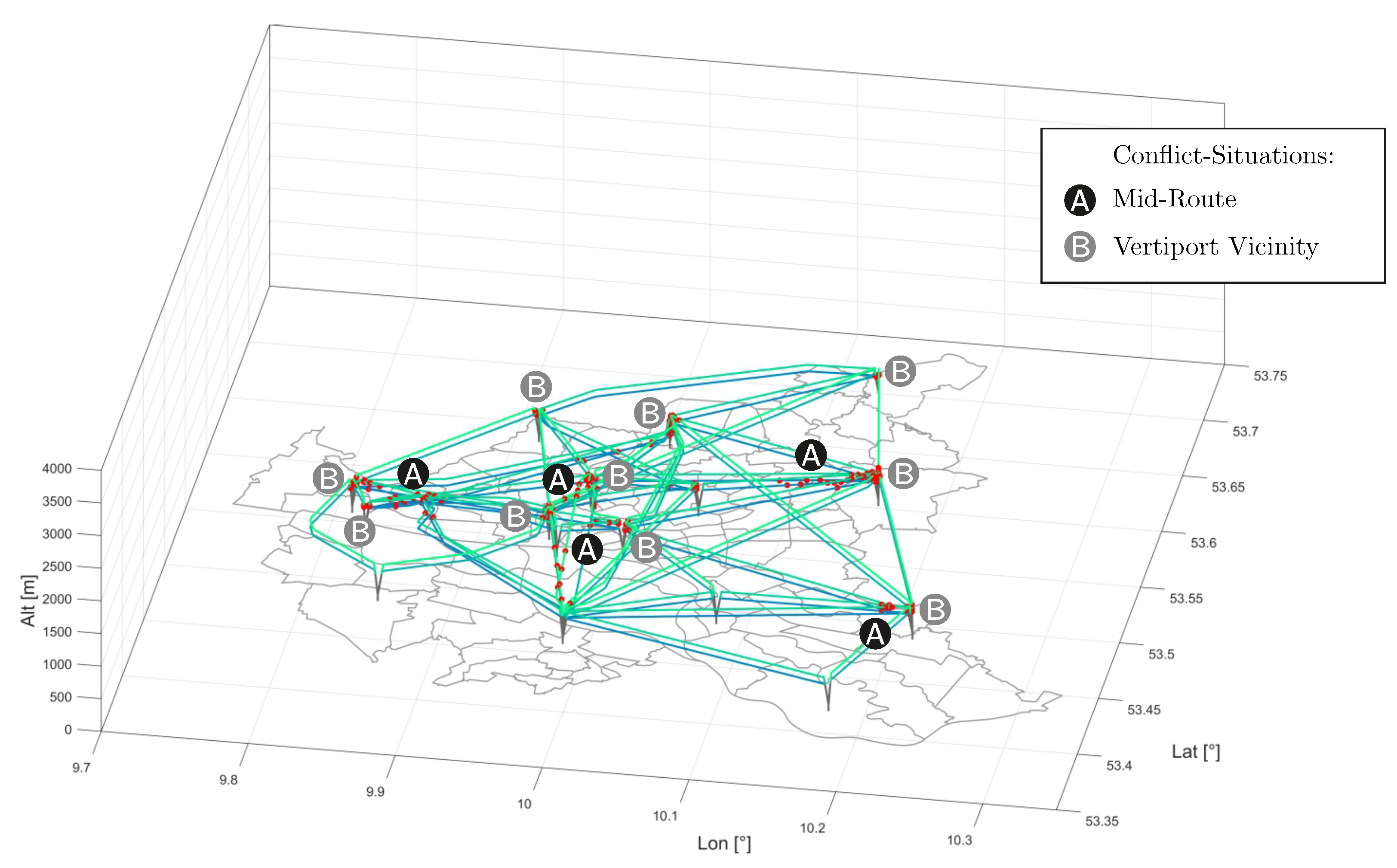
Figure 25 for the third expansion phase (scenario 3). As an average over all expansion phases, conflicts arise in about 5.8% of all flights. In expansion phase 1, the number of trajectory points comprising a loss of separation have a share of 0.4% with a maximum number of one conflict per trajectory. In expansion phases 2 and 3, however, the relative share of conflicted trajectory points is slightly higher with a value of 0.7%. In addition, the trajectories show an accumulation in conflict occurrence. In the subset of trajectories with at least one loss of separation, the average number of detected conflicts can be identified to 1.2 (scenario 2), respectively 1.21 (scenario 3). In one distinct case, a single flight with a maximum number of four conflicts could be observed in the course of this study. Within the subset of generally conflicted flights, the share of trajectories with multiple conflicts could be identified to 12.8% in scenario 2, respectively to 16.1% in scenario 3.
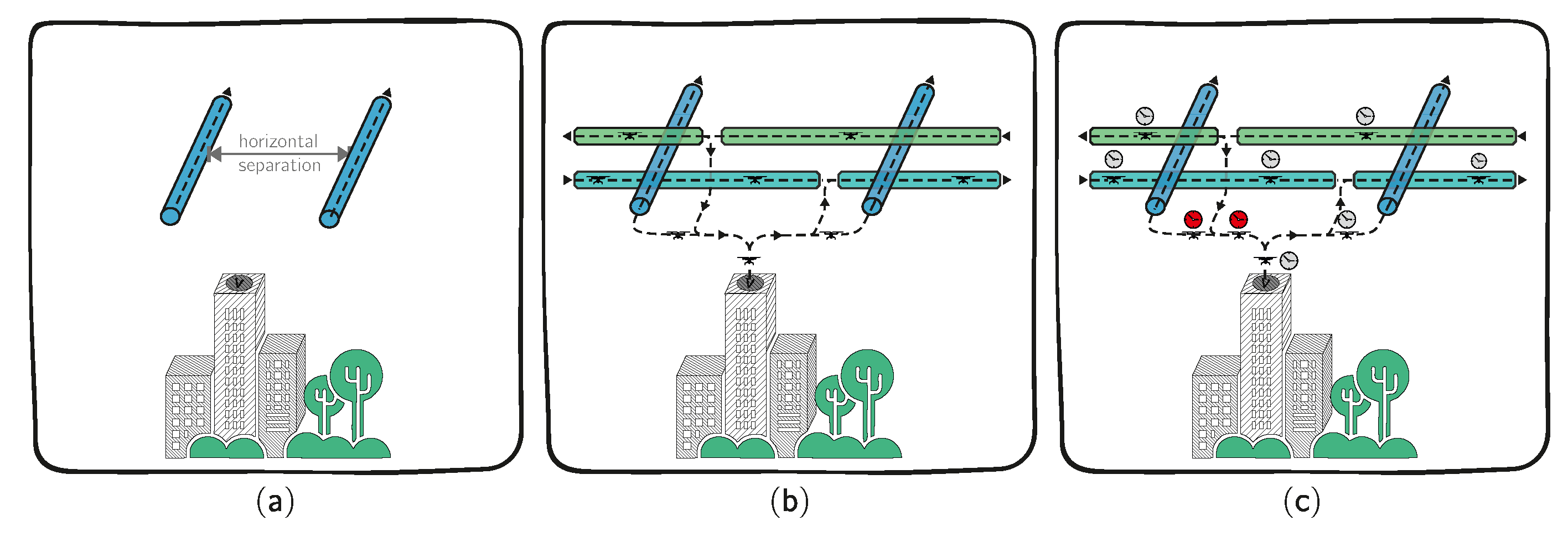
The detected conflict situations can be classified into two categories with various causing effects (compare
Figure 25 and
Figure 26):
- (a)
Mid-Route conflicts. Although the quadrocircular rule is implemented, a set of routes with similar values of bearing between origin and destination will be assigned to the same flight level, yielding a potential loss of separation in an area of converging (or even intersecting) tracks. A consideration of interdependencies among the tracks in terms of collision prevention has not been implemented to this state of the model (see
Section 3.4).
- (b)
Vertiport vicinity conflicts. Since there has been no implementation of special procedures in vertiport proximity, such as arrival and departure routes or an optimized scheduling and sequencing, the airspace around vertiports holds a particularly high potential of conflicts. First, investigations on suitable measures are presented in [
25].
In order to minimize the number of remaining conflicts, they should be resolved by the overall UAM system module before departure. Therefore, an iteration is planned between flight scheduling (component 9), flight trajectory simulation (component 10), and conflict detection (component 11) (see inner iteration in
Figure 6). In the final state, a sensitivity analysis should be conducted to assess the capacity of different UATS designs.
3.8. UAM Cost and Revenue Modeling
In UAM, the research on cost modeling is still at the beginning [
19,
34]. In the field of ground based autonomous mobility systems on the other hand, there have been already several investigations on cost modeling with transferable results in certain aspects. A crucial parameter for determination of passenger specific UAM fare is represented by the operating mode, which can be classified into three categories, as presented in [
69]:
line-based mass transit (in UAM: scheduled air shuttle)
taxi (in UAM: on-demand air taxi)
private vehicle (here: neglected)
In the case of a line-based public transportation system that operates on a fixed time schedule, such as trains or aircraft, the cost structure is commonly based on a ticket system, scaling the fare mainly to the passenger kilometers. As a result, it is in the interest of the operator to provide a route network and a time-schedule that results in high load factors. If the operational mode is designed as a conventional taxi service, an individual passenger or a self-organized group of passengers is assumed to take the ride. Mobility services in conventional taxi mode are mostly based on cost structures that solely take the vehicle kilometers into account. It provides assets of private mobility, but allocates all costs to the passenger. As a consequence, it is financially not desirable for the operator to increase the load factor of the vehicle. Modern ride-sharing services as for example UBER or the German company MOIA are considered as sub-category of a taxi service in the context of this study. The idea of the ride-sharing concept is to offer a pooling service, which allows for providing low-priced taxi rides. As the cost structure of this option has characteristics of a ticket system, it is in the interest of the operator to realize high load factors. Within this study, an Urban Operating Cost (UOC) component has been developed in order to describe and evaluate revenues and expenses of urban flight movements. Therefore, existing approaches for direct operating cost (DOC) modeling of conventional aviation [
70,
71] have been combined with those of autonomous ground-based mobility [
69,
72]. Based on trajectory data of individual flights (e.g., mission time, mission distance and power usage; see
Section 3.6) as well as financial assumptions (e.g., the unit price for energy
, the vehicle price per operating empty weight
or the insurance rate
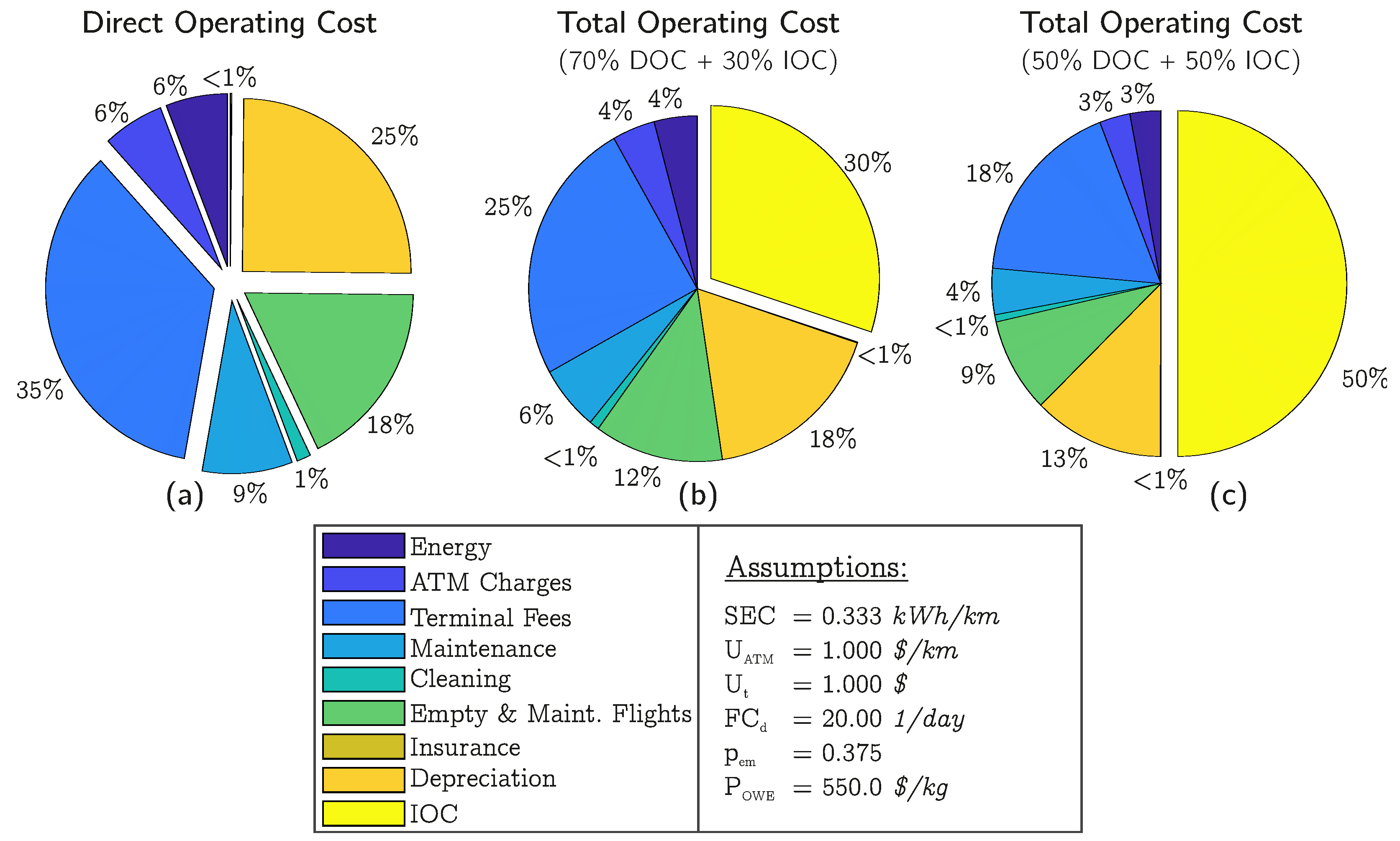
), the UAC component roughly determines costs with regard to (i) energy consumption, (ii) urban air traffic control, (iii) terminal fees (iv) maintenance, (v) cleaning, (vi) empty and maintenance flights, (vii) depreciation, and (viii) insurance.
The identification of costs highly depends on the underlying assumptions. Regarding energy for instance, the average consumer price in Germany was identified to 0.30€/kWh in the year 2018 [
73]. Taking a discount for major industrial customers into consideration [
74], the price can be estimated to 0.16€/kWh, respectively 0.18
$/kWh. To evaluate the impact of individual assumptions, a series of sensitivity analyses has been carried out. For instance, the unit charges for air traffic control (
) and terminal usage (
) are varied in a range between 0.25 and 2 (see
Table 7) due to the high number of uncertainties. In conventional European aviation, all expenses caused by air navigation services (costs for infrastructure, staff, aviation meteorological service, etc.) have to be covered by revenues, which are mainly en-route and terminal charges. Costs are therefore apportioned among the conducted flights and unit rates are regularly adjusted, depending on the volume of flights during a reporting period. Since there is no reliable information on the degree of automation and the human–computer interaction in the future system of UAM-ATC, further uncertainties arise.
In order to allocate the maintenance and depreciation costs to individual flights, the daily number of flight cycles per vehicle (
) is varied parametrically. The integration of an agent-based simulation approach into the UAM system model (see outlook of
Section 3.5) will provide improved possibilities regarding derivation of daily flight cycles and operating times. Maintenance costs are roughly estimated for different types of maintenance events
i based on the labor cost level (
), the number of technicians (
) as well as its duration (
) and interval (
). Since the predominant direction of traffic significantly varies in the course of a day (see
Figure 11), the unavoidable occurrence of empty and maintenance flights induce additional costs for energy as well as for navigation and terminal services. The value of its percentage share (
) is highly influenced by the demand and the vertiport network design, as, for example, a shortage of locally available landing positions might induce the necessity for a parked vehicle to lift-off. A proper initial guess for estimating
can be derived from financial reports of conventional taxi industry. According to [
53], merely 47.5% of the travel distance covered by taxis in Hamburg City was actually occupied by passengers.
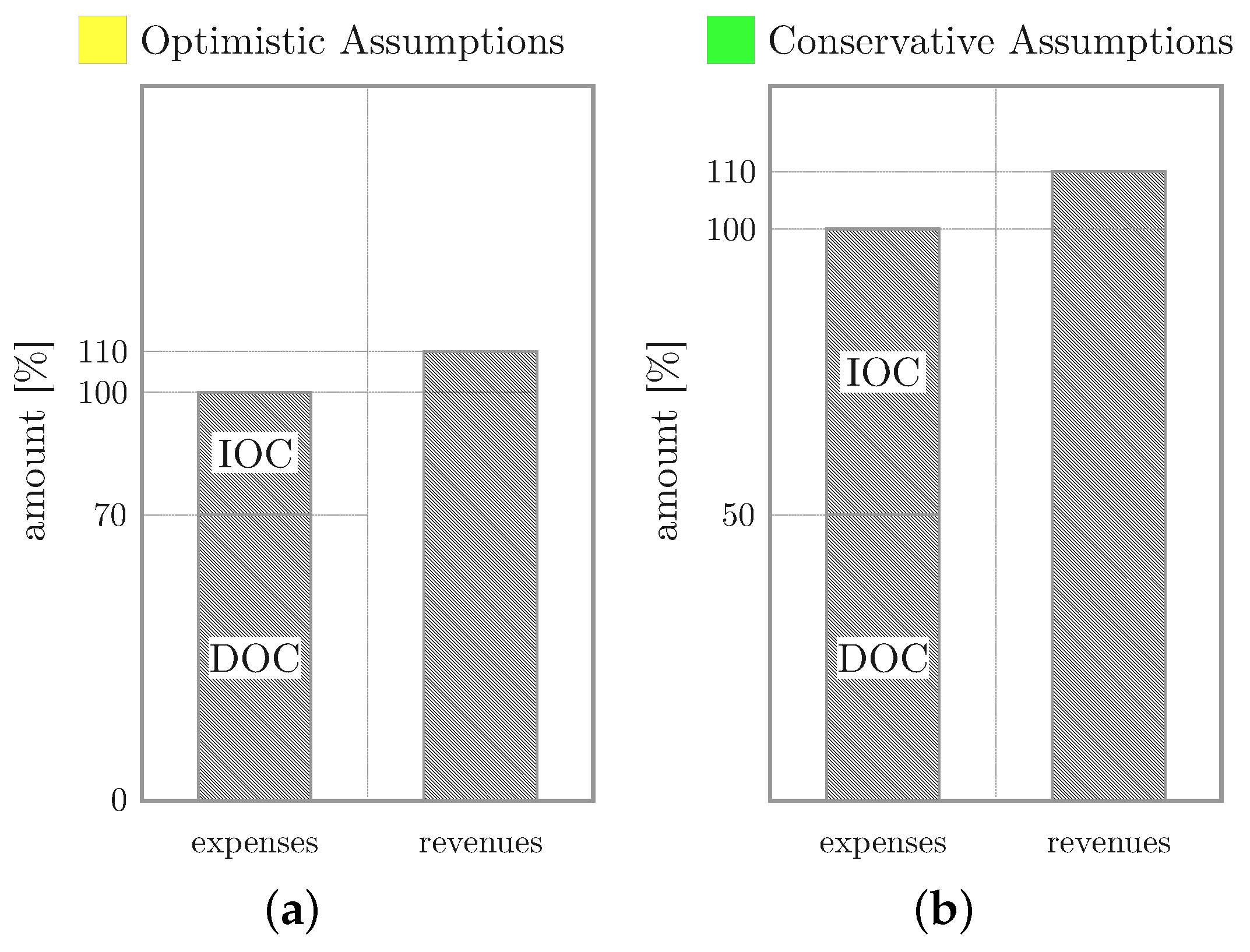
Indirect operating costs (IOC), such as taxes and expenses for administration, security and marketing activities, are calculated on a percentage basis for two different cost assumptions (compare
Figure 27). In the optimistic case, it is assumed that the IOCs account for 30% of the total operating cost (TOC). In the conservative case, IOC and DOC are on the same scale. The targeted profit margin for UAM is set to 10 percent [
19].
At the current state, the calculation of revenues is solely implemented for the operation mode ’on-demand air taxi’. After studying air fares from VOOM in Saõ Paulo and the heliport network, we assume a maximum air fare of about 10
$ per kilometer [
75]. However, to ensure an affordability of UAM services for a large number of citizens, the price per kilometer should be on a similar scale as taxi rides. Current prices for taxi rides in Munich, for instance, are in the range of €1.70–2.00 per kilometer [
19]. Consequently, air fares are varied within this study between 1–10
$/km. To increase the economic efficiency of ultra-short routes, a base fare per take-off is also integrated into our revenue module and modified within 1–10
$ per flight.
It is a complex challenge to deduce costs for UAM without precise information on both the market volume as well as the future design of the UAM system. Nevertheless, initial results are exemplarily presented in the following which are needed to perform comparative studies that aim at quantifying specific cause–effect relations in system design. Therefore, it has to be explicitly mentioned that the calculation of economic efficiency is still based on very strong assumptions. At this early stage, it is therefore not possible to draw any conclusions concerning the reasonability, the benefits, and the economic viability of urban air mobility for Hamburg. For the optimistic and the conservative cost scenarios, exemplary results are illustrated in
Figure 28 for an eVTOL flight distance of 11 km.
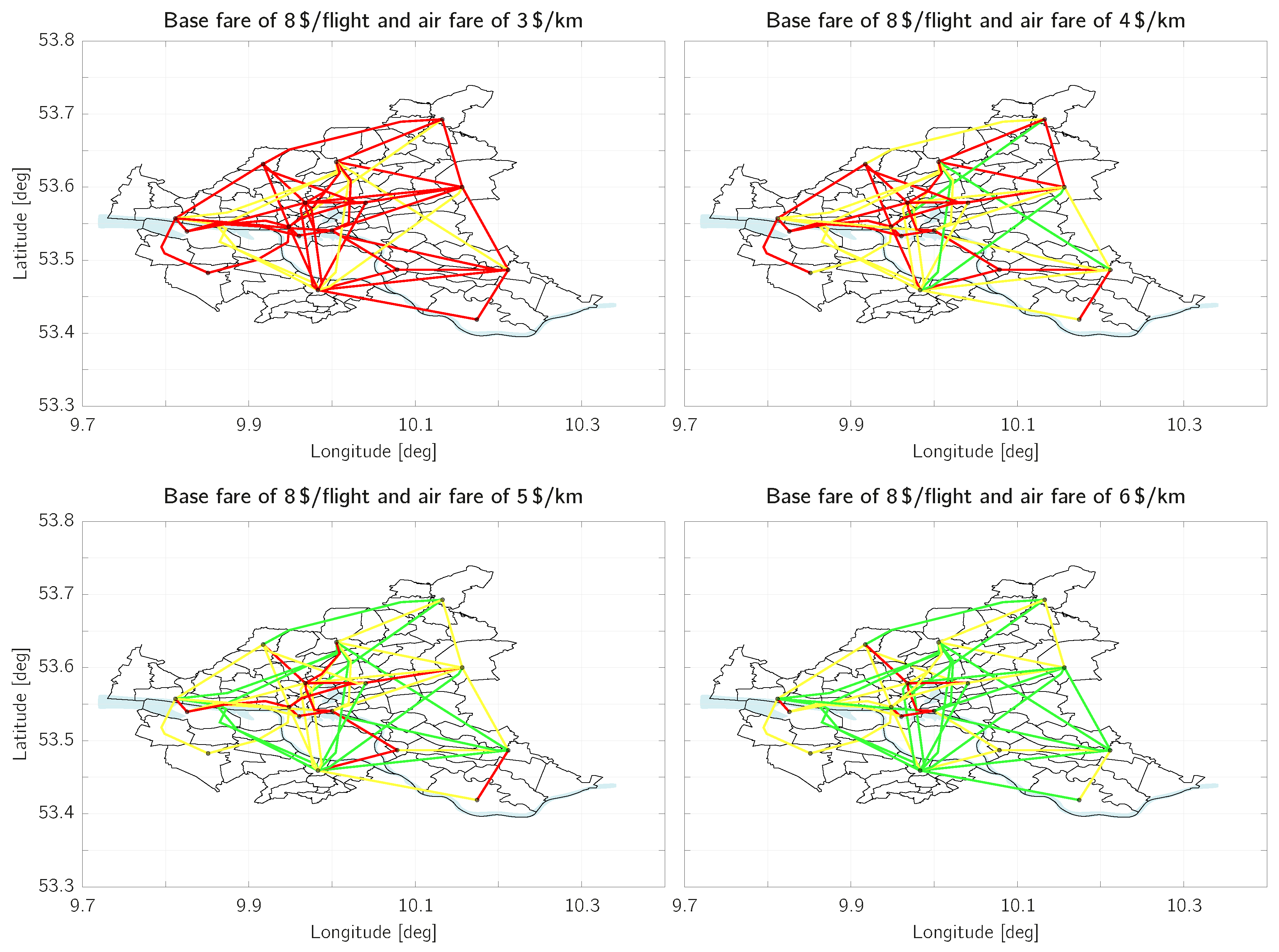
For the third scenario, initial results are exemplarily plotted in
Figure 29 assuming a constant base fare of 8
$ per flight and air fares of 3–6
$/km. Based on optimistic assumptions, an air fare of minimum 5
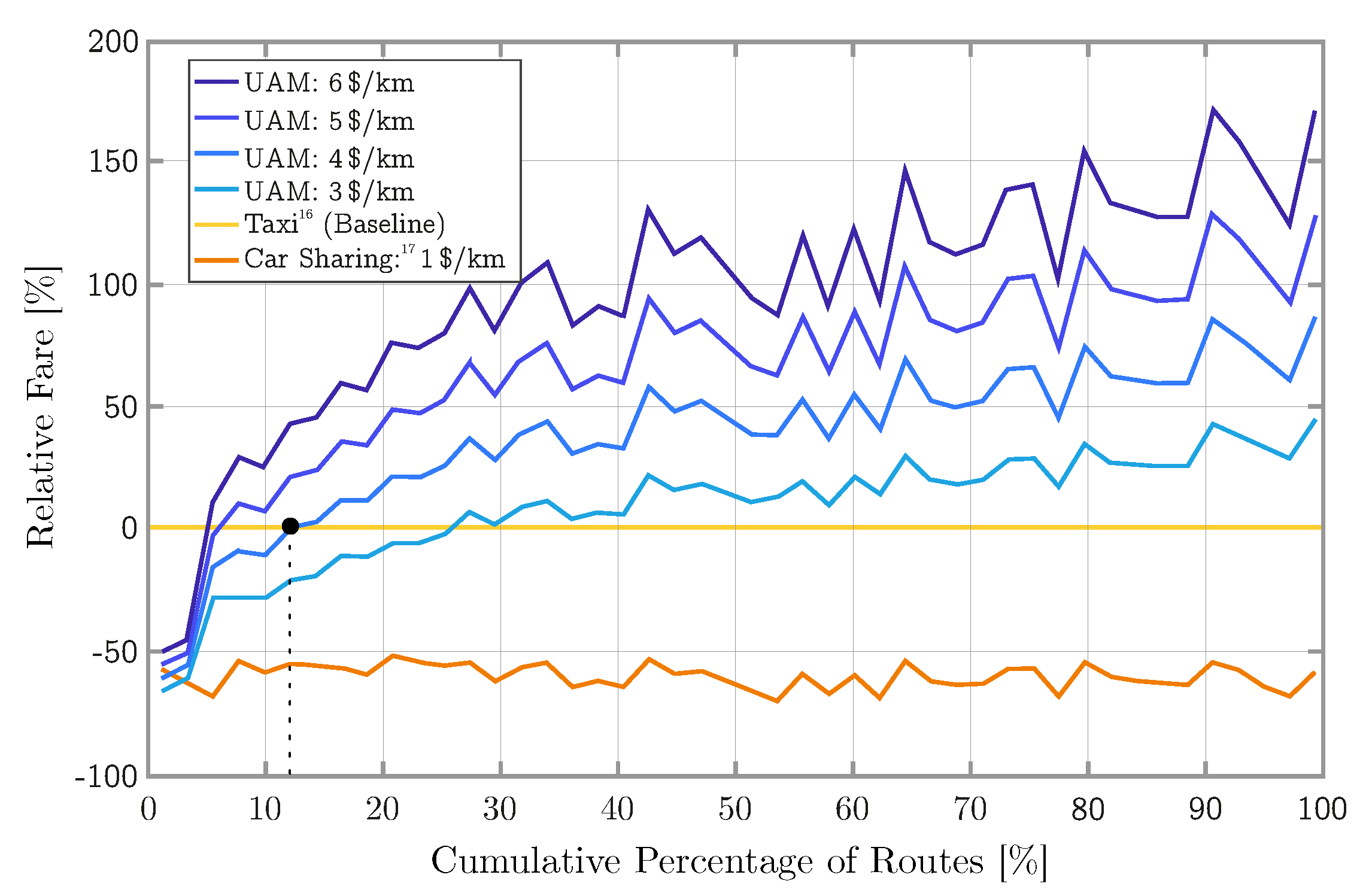
$/km is necessary to cover the TOC in about 70% of the examined route network. A comparison of fares between existing ground-based on-demand mobility and conceivable on-demand UAM services is shown in
Figure 30. Although UAM fares are expected to be significantly higher in absolute numbers than for ground-based services, such as taxis (taxi rates in Hamburg range in between 1.5€/km and 2.45€/km [
76]) and car sharing services (an exemplary service rate of the provider MILES ranges between 0.89€/km and€1.19 /km [
77]), there is a subset of routes in 12% (air fare of 4
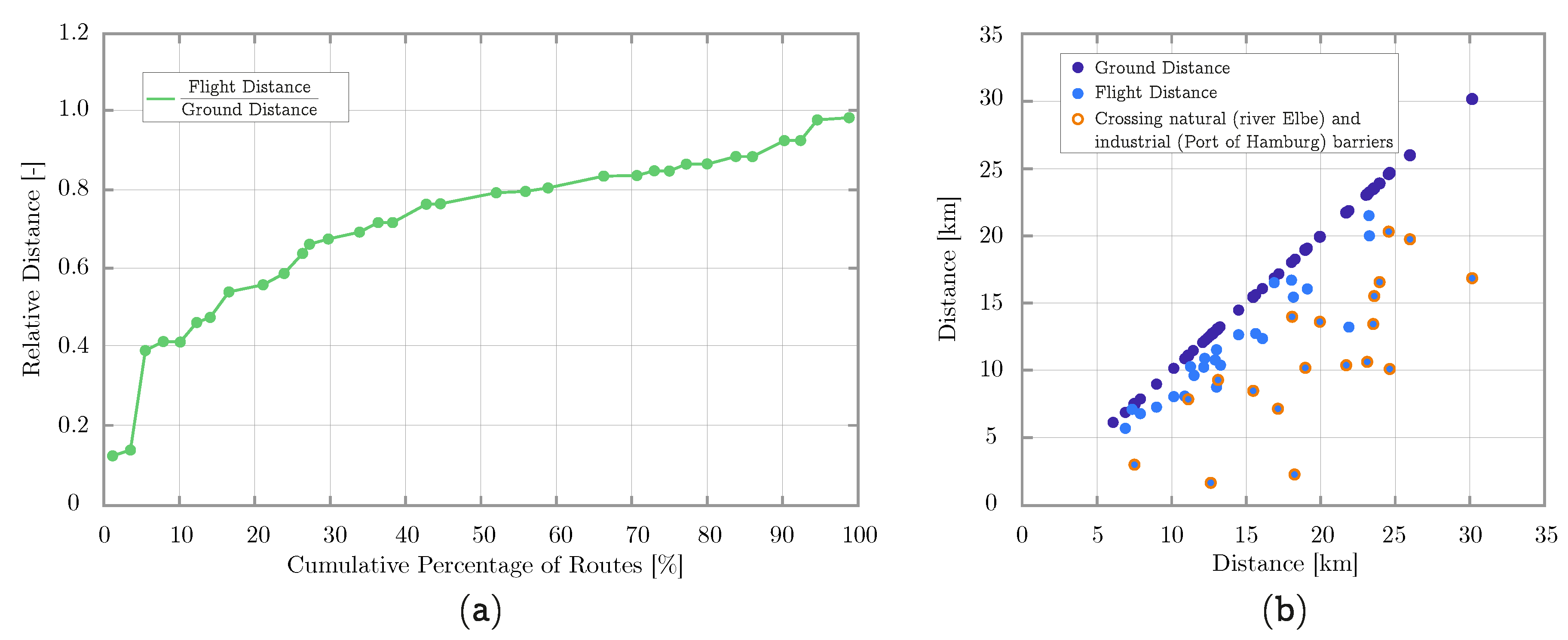
$/km), respectively 26% (air fare of 3
$/km) in which a distance reduction due to a more direct routing (see
Figure 31) can compensate the higher costs of UAM. Particularly high savings in distance are achievable when crossing the river Elbe (natural barrier) and the port of Hamburg (industrial barrier), which cause bottlenecks to Hamburg’s transport system.
To enable the derivation of key figures for specific UAM market studies, a door-to-door multi-modal simulation has to be performed in the future (public transport), including the consideration of ways to and from vertiports, which are currently not taken into account. An important source of charges that has not been considered so far is represented by construction and upkeeping of required ground infrastructure. These costs induced by a vertiport network are hard to quantify at this early stage in design process as they are highly affected, among others, by the amount, design and varieties of vertiports (a large number of small vertiports with a single take-off position (e.g., on rooftops) vs. a lower number of seperate buildings with several parking and take-off positions; see
Section 3.3), land prices and building regulations. Furthermore, charges for security, noise, and emissions should be implemented in further studies. Since there is a distinct expected interdependency between the pricing and the demand for UAM, it is also planned for future works to create a feedback-loop between components 3 and 12 within the presented UAM system model (see outer iteration in
Figure 6 and
Figure 7). Questions of public acceptance and justice should also be addressed, as comparably high expected prices for UAM services might result in limited accessibility to this transport mode for high shares of population.

 ,
, 

































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}