1. Introduction
System-of-systems engineering (SoSE) is a growing field of research within aerospace product development. Aerospace systems are becoming more and more connected with the operational environment and other systems in general. This leads to new and higher levels of complexity and uncertainty that must be managed. Consequently, it creates a desire for understanding systems and their connections to the operational environment, and other systems, early in the development process. This is especially true for aerospace systems, which often have long lead times and long expected lifespans, leading to higher levels of risk and uncertainty during development. A holistic view of these systems are therefore needed to explore the influence of possible changes in the outside world, such as changing politics, policies, and environmental aspects. By increasing the understanding of these complex relationships early on, the identification of the most suitable design solutions can be facilitated.
Having a holistic view implies that more aspects than just single system solutions must be considered during the early design phases. The increasing number of connections with other systems takes the development into a system-of-systems (SoS) perspective. SoSE involves the integration of constituent systems (CS) to provide capabilities that are unattainable by the constituents alone [
1]. It also aims to assist the development of robust, flexible and interoperable system solutions from a long-term perspective, which is a necessity in the aerospace industry. Traditional product development for systems engineering (SE) has been performed based on fixed requirements and needs. However, the increased complexity of systems and SoS is shifting the focus away from initially specified requirements to the fulfillment of capabilities over time. Systems that are capable of delivering capabilities over time, and under changing circumstances, can consequently be regarded as most suitable for future development. This shift in focus leads to new development challenges and a request for the ability to incorporate the possibility of changing requirements into the development process. New methods and approaches, in which changing requirements and customer needs can be modelled and managed with explorations and forecasts of the available design space, early in the development of new products or product portfolios, are therefore needed. Furthermore, the ever-increasing interoperability between systems related to an overall SoS perspective must also be included to get a holistic view and a perception of the available design space for future aerospace products.
1.1. A System of Systems Definition
While the term “system” can be referred to as “a set of elements or parts that is coherently organised and interconnected in a pattern or structure that produces a characteristic set of behaviours” [
2], the term “SoS” can be defined as “an interoperating collection of component systems that produce results unattainable by the individual systems alone” [
3]. An SoS can be distinguished from a system based on five different characteristic properties proposed in [
4]. These properties specify that a system can be regarded as an SoS if it experiences:
Operational independence
Managerial independence
Geographic distribution
Emergent behaviour
Evolutionary development
Operational independence and managerial independence describe how each of the system’s components operate on their own and that they are capable of performing their purposes independently of the other components in the system. They can also be managed independently and be developed by different organisations. Geographical distribution explains that the system’s components can be situated in different geographical locations and that the system’s components are not necessarily physically connected. Accordingly, communication and exchange of information are the main types of interaction between them. Emergent behaviour implies that the components of the system together perform capabilities that are not achievable by the components individually. Finally, evolutionary development describes how the composition of the system can change throughout its life cycle. New and different components can be introduced into the system, while old components can be removed as time progresses. Examples of SoSs in the aerospace context can be air defence systems, air traffic control networks or maritime operations, such as search and rescue (SAR). The definition of an SoS listed in this section is used throughout this paper.
1.2. Related Work
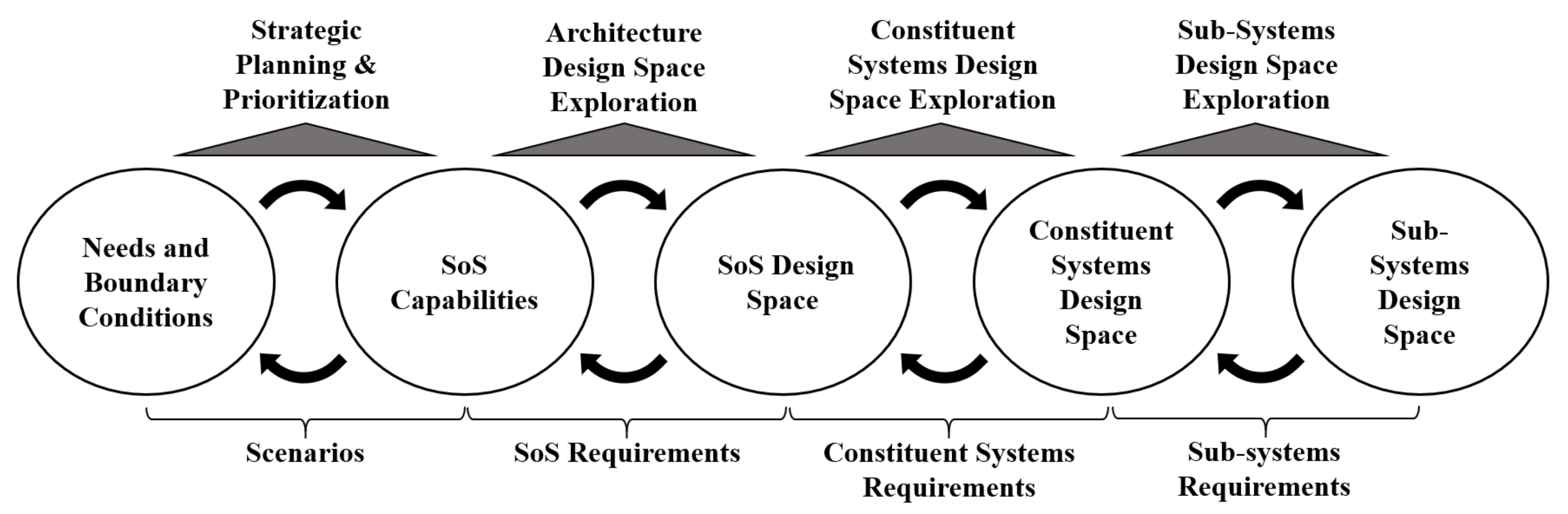
SoSs are all around us and are becoming increasingly common as digitalization enables an increasing number of systems to interoperate, share information and exchange data with each other. Suggestions for how SoS perspectives can be used in aerospace product development have been presented in related research [
5]. The design process is here explained to be divided into five different levels of interest that can be used to explore SoS holistically. These levels are presented in
Figure 1.
The five levels presented in
Figure 1 are associated with different design spaces that are interconnected with each other. Needs and boundary conditions generate a desire for specific capabilities that can fulfil them. The required capabilities can be achieved by individual or collaborating systems that are analysed in an SoS design space. The SoS can in turn be composed of different CSs, that are subsequently composed of various subsystems. The described process has no specific starting point and can be considered recursive. This means that a change in needs and boundary conditions will propagate and consequently influence all design spaces at the different levels. A change in the subsystem design space will therefore influence the other levels in a similar way. This view of a holistic design process is envisioned to be used to investigate the influence of changes from one level to the others with “what-if” analyses and thereby explore the available design spaces. Approaches from fields such as SE have been widely used in aerospace product development and have well established practices. However, the more holistic SoS view requires different approaches to achieve satisfactory results in an ever-changing world.
1.3. Purpose of Paper
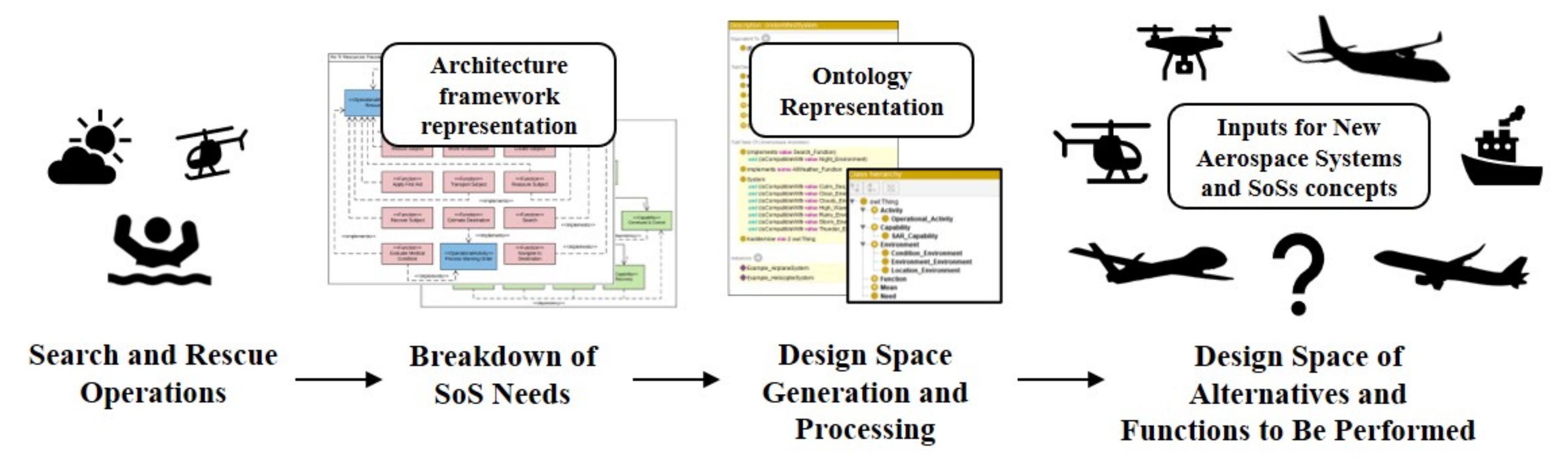
This paper presents an approach to break down SoS needs into required capabilities and functions by means of an architecture framework. The outcome of the breakdown is then represented in an ontology model that introduces the ability to dynamically investigate changes in the created knowledge representation with description logic reasoning. The ontology model also facilitates possible expansions and reductions of the captured design space representation of alternatives and functions to be performed. A case study based on the SAR operations of the Swedish Maritime Administration (SMA) and the International Aeronautical and Maritime Search and Rescue (IAMSAR) manuals is ultimately implemented to show the utility of the presented approach. The approach contributes to design space exploration methods for complex systems and SoSs and also to the realisation of the holistic design process from [
5] shown in
Figure 1. The overall approach and purpose of this paper is illustrated in
Figure 2.
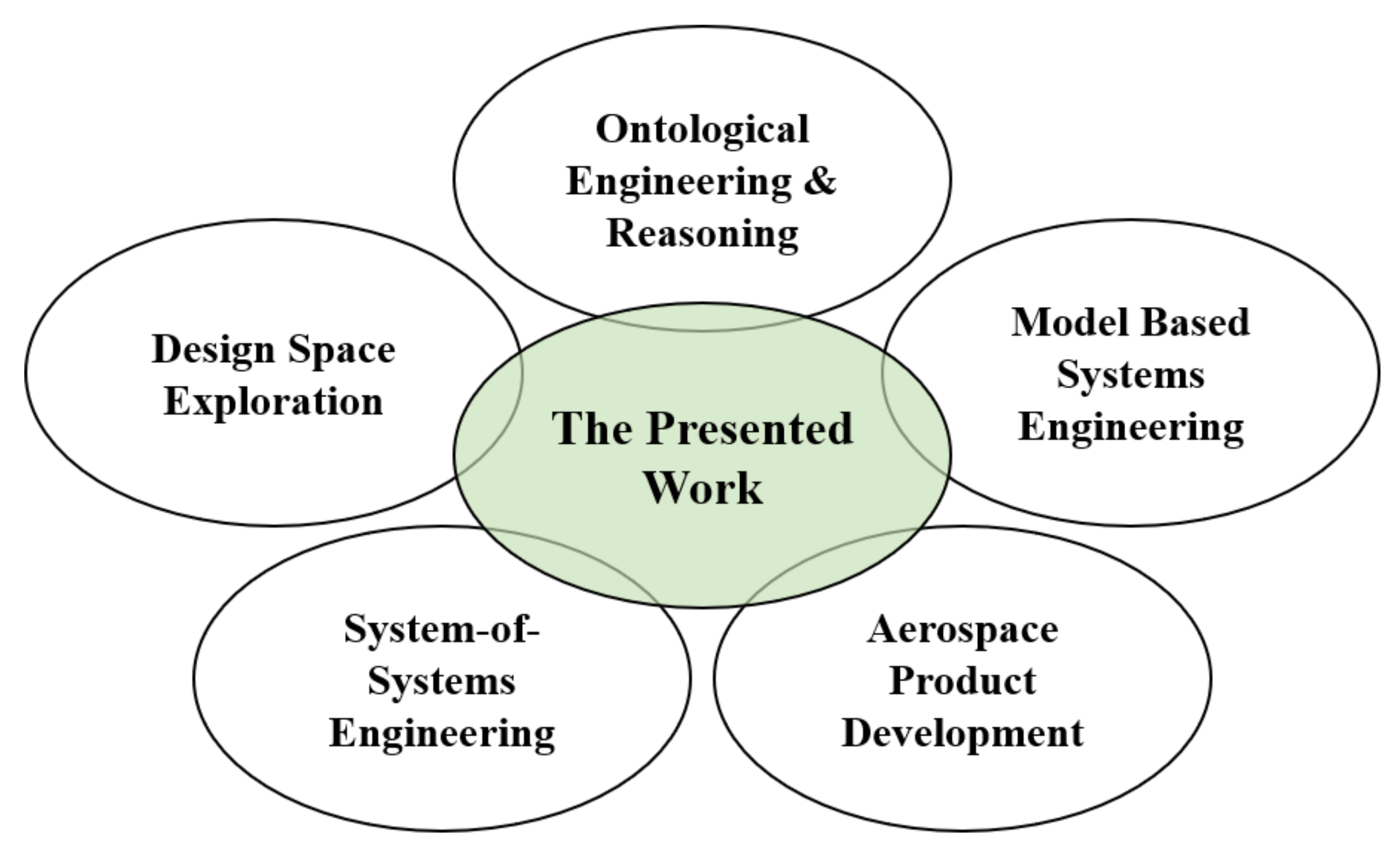
Additionally, this paper briefly describes various methods for approaching aerospace product development with an SoS view. This is shown in
Section 2 together with other research results and how different research areas connect to the work presented in this paper.
Section 3 describes the general workflow of the presented approach, while
Section 4 illustrates the use of the approach in the SAR case study. Opportunities for future work and improvements are presented and discussed in
Section 5.
Section 5 also elaborates on how the outcome of presented approach can be used for a continued design process where new aerospace and SoS concepts can be generated. The most important conclusions of this study are presented at the end of the paper in
Section 6.
3. Approach and Methods
This section presents a method that has been developed to approach the problem outlined in the introduction. It shows how the holistic view in
Figure 1, and its correlated levels of interest in needs and SoS capabilities, can be approached using an architecture framework and an ontology with description logic reasoning capabilities. Parts of the approach build upon previous research results presented in [
37,
38].
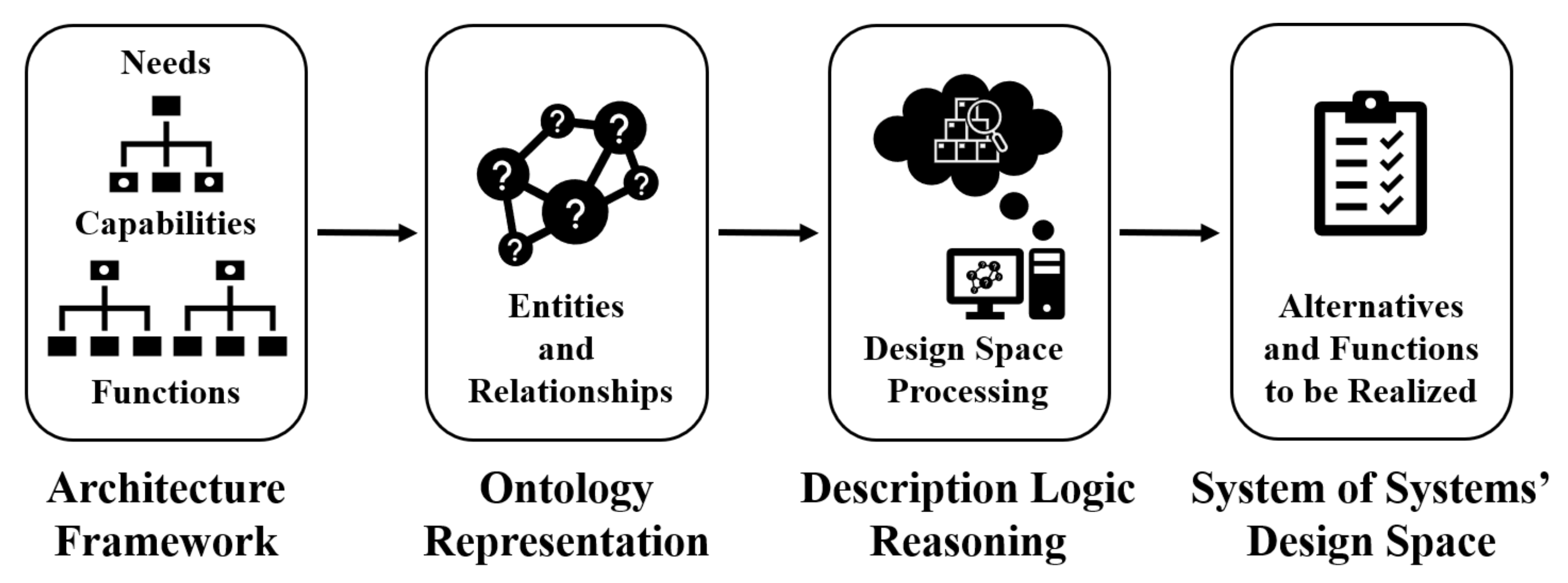
The purpose of the presented method is to illustrate how SoS needs can be broken down into capabilities using an architecture framework. The architecture framework can then be used to further break down the required capabilities into functions that must be performed by the involved systems of the SoS to meet the overarching capabilities. The use of an architecture framework provides a consistent and standard way of performing the breakdown chain described above. An ontology representation of the knowledge captured in the breakdown allows the available design space of SoS capabilities and functions to be queried and processed by a description logic reasoner. The transition into an ontology also adds a new level of flexibility for introducing changes and for adding additional information to the represented knowledge. This means that the design space can be both expanded and reduced in an efficient and traceable way using the reasoner. A reduced design space of alternatives, and functions to be performed based on user-defined needs and requirements, can thereby automatically be inferred by the reasoner. The outcome of the approach can consequently be used as inputs for a continued design process where realisations to the indicated functions can be provided by different concepts, such as aerospace systems.
An illustration of the presented approach is shown in
Figure 4. The remainder of this section gives a detailed description of each part of the presented approach, while
Section 4 shows how the approach can be utilised in a case study.
3.1. Breakdown of System of Systems Needs Using an Architecture Framework
The first step in the approach presented in
Figure 4 is to break down SoS needs into corresponding capabilities and functions. The needs of an SoS typically correspond to those of the involved stakeholders and any customers. Architecture frameworks such as the DoDAF and UAF consist of different viewpoints designed to help in the description of architectures for complex systems. They provide a standard way to represent architectures through an MBSE approach [
39]. Architecture framework viewpoints describe models for areas of interest, such as capability taxonomies, resources, standards and requirements. The intention of the presented approach is to use the taxonomy and descriptions of architecture framework viewpoints to provide a consistent way of understanding the hierarchical structure and relationships between needs, capabilities and functions.
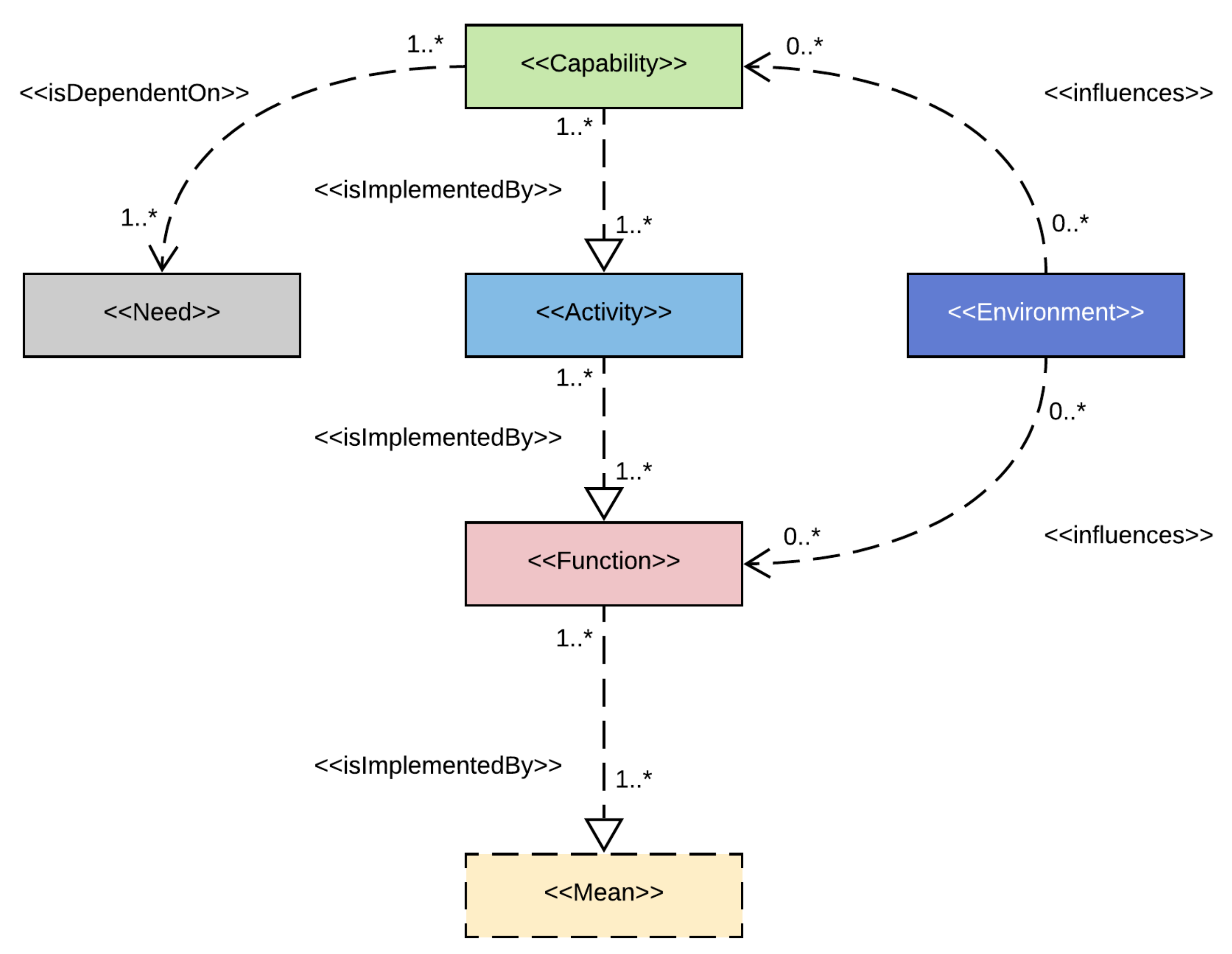
A stakeholder’s need is a request for a solution to a problem that can be provided by a service in a defined environment. In this sense, a stakeholder is an individual or organisation that has an interest in at least one phase of an enterprise described in an architecture framework. The enterprise must be capable of satisfying the stakeholder’s needs and delivering the service, which means that it must possess the capabilities of doing so. A capability is defined as the ability to perform a set of activities through a combination of ways and means. Consequently, an activity is a realisation, or implementation, of a capability through a combination of one or more functions. Functions are performed by means or elements of the enterprise in question, for example, systems and subsystems. Depending on the surrounding conditions, such as the environment, an activity might require different functions to meet the intended capability. The definitions listed above are based on the UAF documentation found in [
40].
Another important aspect of architecture frameworks is the scenarios that a complex system or SoS are presumed or expected to participate in. Different scenarios will have different stakeholders and needs, which consequently lead to different capabilities and functions to be performed. Investigations of different possible scenarios can facilitate the identification of reoccurring capabilities and functions that are important to fulfil. External factors such as the environment and environmental conditions of a scenario must also be considered. As stated in the introduction, changes in the outside world will influence the required capabilities. It is therefore important to ensure that the capabilities and functions can be sufficiently performed over time and under changing external factors.
Architecture frameworks include many more considerations and viewpoints than those described in this section. However, the purpose of the approach is to identify functions that are to be performed by constituent systems of an SoS. Consequently, the architecture framework is mainly used as a structured, standard and consistent way of performing the breakdown as mentioned previously. In addition, the architecture framework viewpoints give an indication of what needs to be included and modelled to capture the holistic view of an SoS.
Figure 5 shows an illustration of the intended architecture framework breakdown approach.
As illustrated in
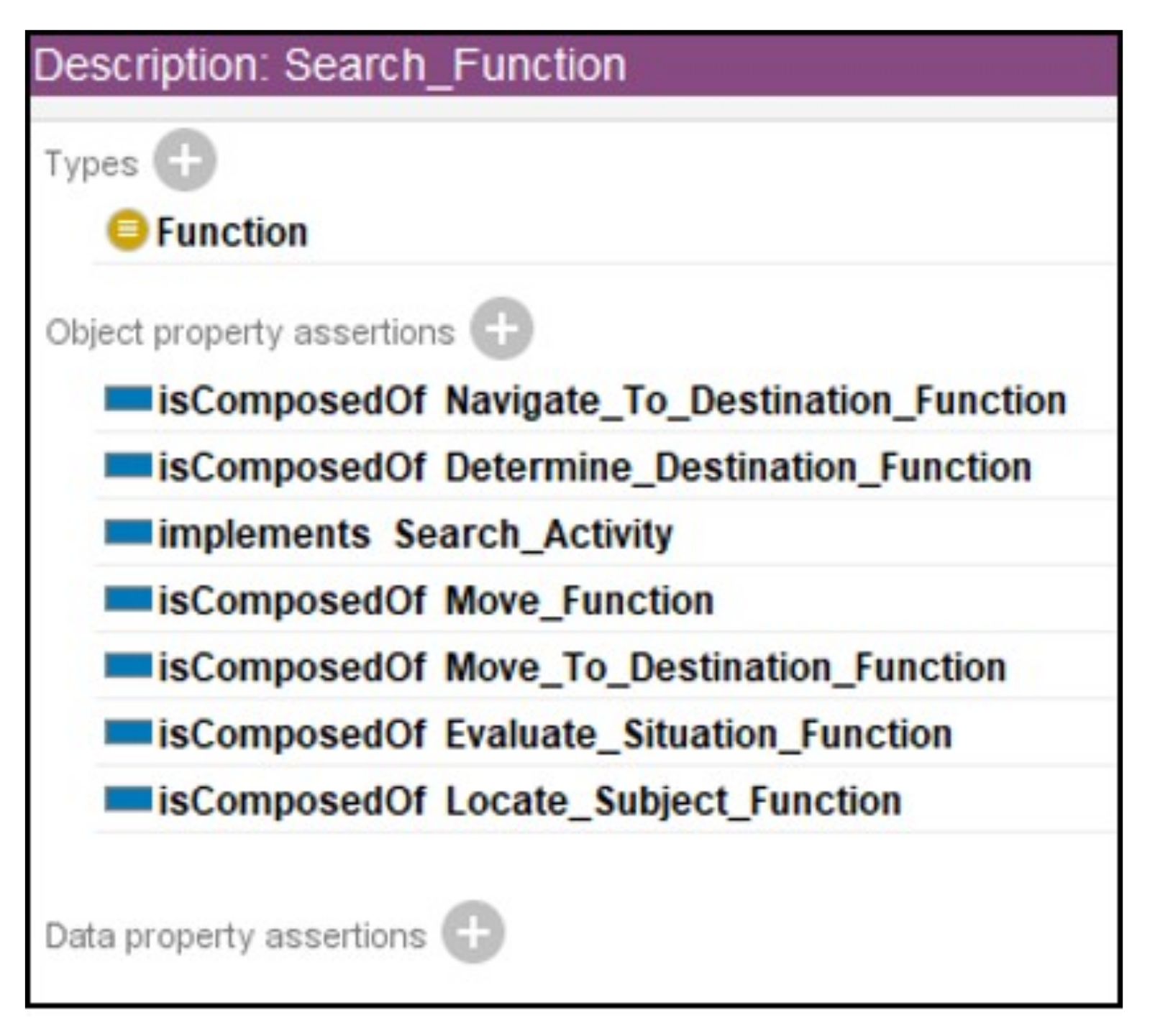
Figure 5, needs must always be associated with capabilities to be fulfilled. A capability is therefore dependent on a corresponding need. A capability can be implemented by at least one activity, and in a similar way one or more activities can implement at least one capability, if seen in the inverse direction. The same also applies between activities and functions. This structure is very similar to that of an F/M tree, where functions and means alternate. Therefore, capabilities can be treated as functions. This implies that they can be seen as the main functions to be performed, and activities are the means by which to implement them. The activities are implemented by functions that in turn can be allocated to suitable means, such as systems and subsystems. The F/M tree approach can thereafter be continued to perform more detailed functional breakdowns if desired. The environment can influence both capabilities and functions, as shown in
Figure 5. The environmental conditions can consequently introduce constraints on a capability required to implement an activity, for example.
3.2. Ontology Representation
The next step of the approach is to represent the outcome of the architecture framework breakdown in an ontology. The modelling of the ontology can be done using an ontology development process presented in [
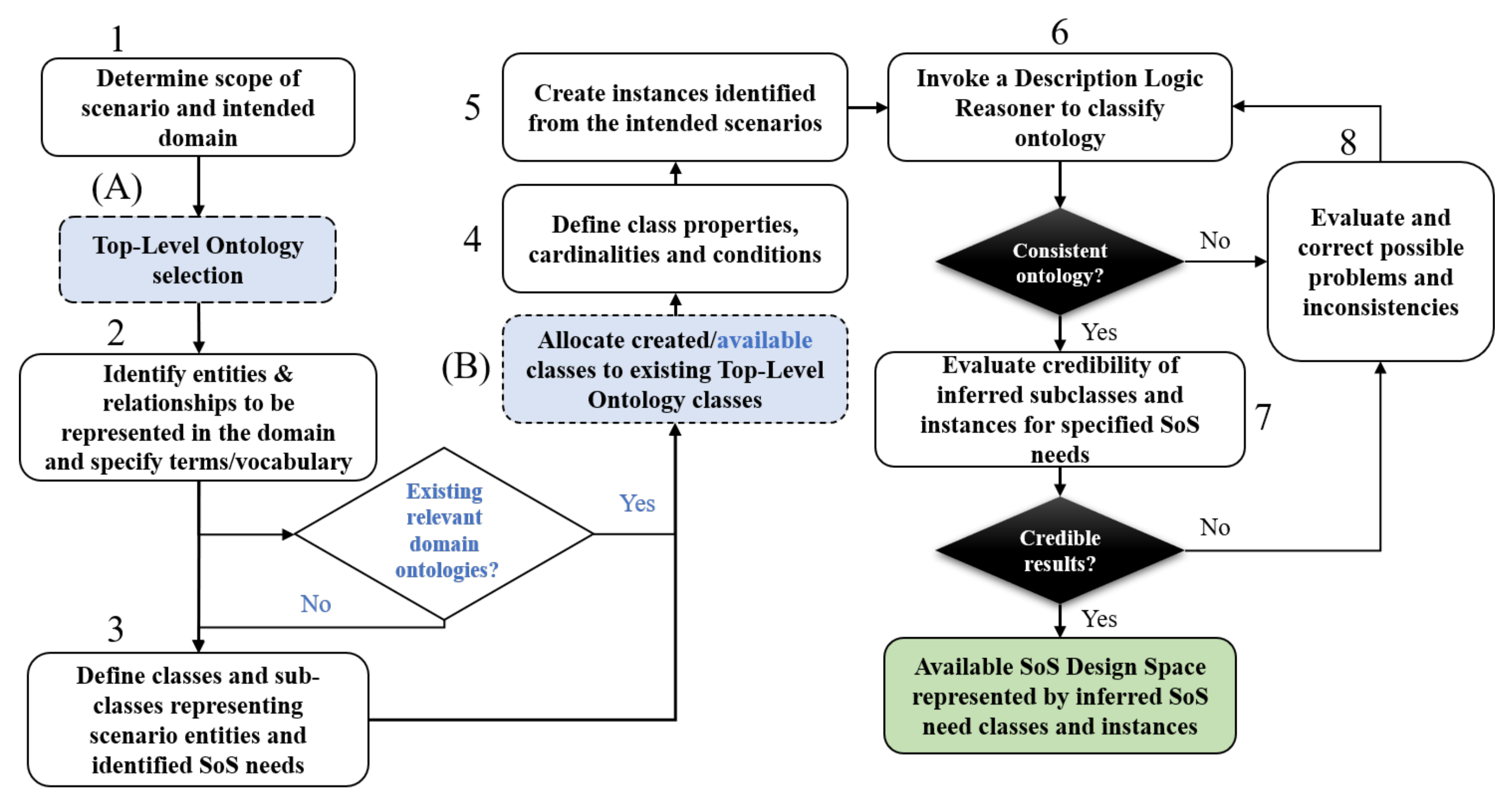
37]. The modelling is here performed through eight consecutive steps that can be used to generate and process an SoS design space.
Figure 6 shows the different steps of the ontology development process.
Step 1 of the process is used to determine what should be modelled in the ontology. This corresponds to the domain and scenarios of interest that are to be represented. An optional step, denoted (A) and (B) in
Figure 6, can be used if a top-level ontology structure is desired or to be used. A top-level structure can bring several benefits, as explained in
Section 2.2. It is also possible to include existing relevant domain ontologies. More details on these optional steps are found in [
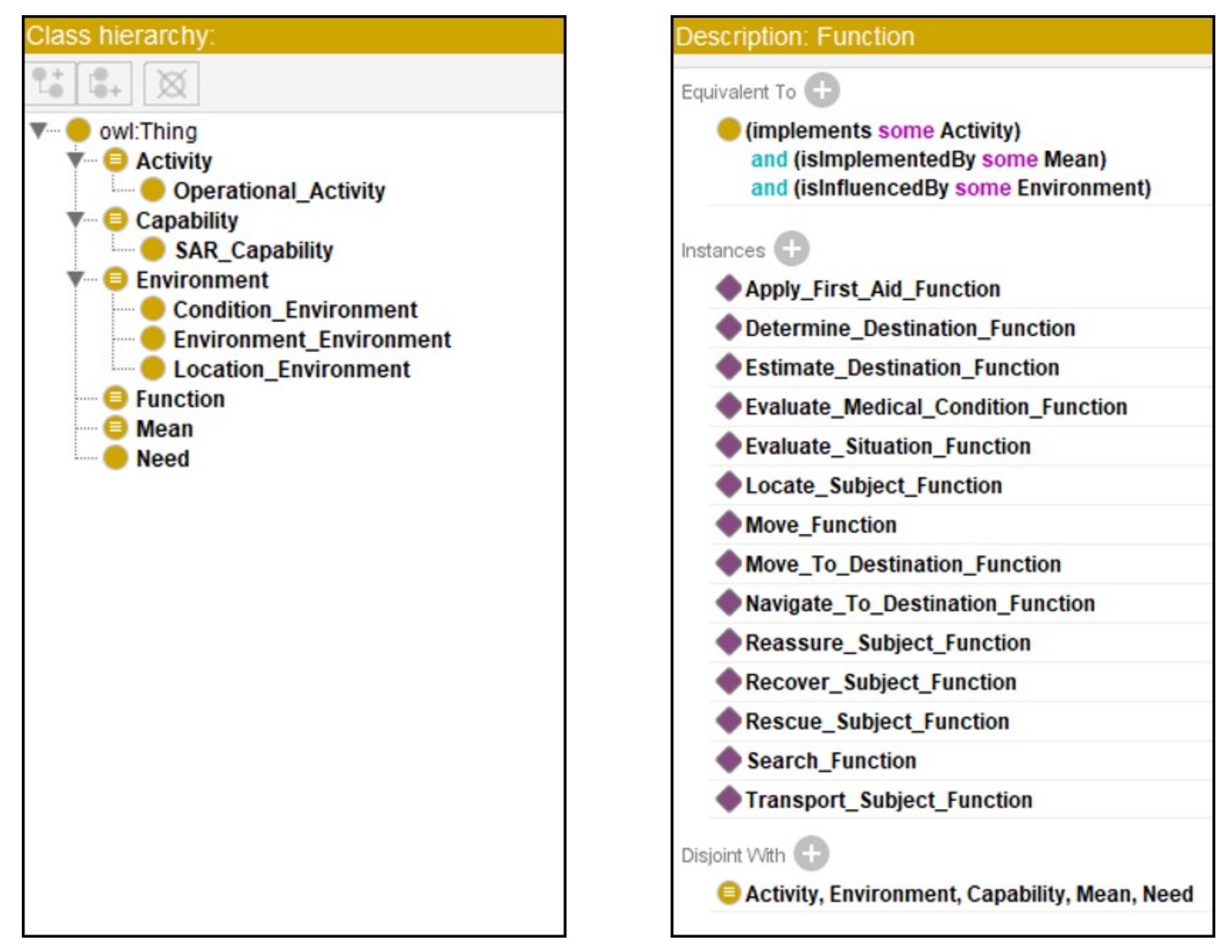
37]. The second step is to identify the entities and relationships that are to be modelled in the ontology. Entities include capabilities, functions and environmental conditions but can also be physical components such as systems or resources. In the third step, the previously identified entities are modelled in the ontology as classes in a structured taxonomy. The fourth step corresponds to the modelling of relationships that exist between classes. Instances, also called individuals, are the lowest granularity of an ontology and should represent the lowest level of the previous breakdown from the architecture framework. This can, for example, be a specific function or capability. An instance can also correspond to a certain type of aerospace system, such as a specific helicopter or airplane.
The remaining steps of the ontology modelling process involve the use of a description logic reasoner that can classify the ontology and create a design space of alternatives or functions to be performed by the SoS. The following section describes steps six to eight in more detail.
3.3. Design Space Processing with Description Logic Reasoning
As step six in
Figure 6 explains, the invocation of a reasoner is done to classify the ontology and check it for inconsistencies. The reasoner will build up a new ontology based on the modelled classes and relationships between them. This new ontology is called an inferred ontology, while the unclassified one is referred to as an asserted ontology. The knowledge represented in the ontology model can also be further expanded and processed at this stage using the reasoner. This can be done, for example, by creating defined classes that contain necessary and sufficient conditions. Defined classes can be populated with classes and instances that fulfil the specified necessary and sufficient conditions described in the defined class definition. This means that a reasoner can automatically position new information added to the knowledge base under the appropriate classes if modelled correctly. Defined classes can, in this sense, also be used to generate a reduced design space of alternatives or functions to be performed based on user-defined needs and requirements of an SoS. The reasoner can consequently populate these defined classes with the classes and individuals that are able to satisfy the described conditions in them. A design space of alternatives or functions that fulfil the defined needs and requirements can therefore be created and simultaneously reduced.
The credibility of inferences made to the defined classes should be evaluated and checked for unexpected results, as explained in [
37] and step seven of the process in
Figure 6. Step eight is only to be performed if inconsistencies are found or unreasonable results are achieved. The inferred design space captured in the ontology can finally be extracted and further processed or evaluated.
3.4. Design Space of Alternatives and Functions to Be Performed
Finally, the approach illustrated in
Figure 4 gives a set of alternatives or functions that are to be fulfilled to satisfy desired needs and requirements. It is possible to explore the design space of alternatives or functions to be performed using the reasoner. This can be done by changing class definitions in the ontology, or by adding additional defined classes, to see how the changes propagate due to changing scenarios and circumstances, for example. The reasoner can reinfer the asserted ontology and thereby show how the sets of alternatives or functions to be performed have changed. The alternatives and functions that are most persistent to changes can consequently be identified as the ones that are most important for the SoS to fulfil in order to cover a wide range of possible scenarios. These “what-if” investigations can also be performed on the environmental conditions to get a perception of their influences on the design space.
The resulting reduced design space of alternatives can be further investigated using ABS, for example as shown in [
38], where the performance measures of different SoSs with airborne SAR assets are investigated. The subsequent realization of the reduced design space of possible functions to be performed can be investigated with a continued F/M tree approach, as mentioned previously. However, the scope of this paper is mainly to show how a reduced design space of alternatives or functions to be performed can be obtained, and a further evaluation and realisation part is therefore not covered.
Section 5 discusses this in more detail and provides examples of possible next and additional steps of the presented approach, together with brief elaborations on them.
5. Discussion and Future Directions
The case study presented in the previous chapter has shown how the suggested approach in this paper can be used to help breakdown SoS needs into required capabilities and functions. The case study has also shown how the reasoning capabilities of an ontology made in OWL can be utilised to expand the captured knowledge and to increase the understanding of the available design space of alternatives and functions to be performed by new aerospace systems and SoS concepts. Consequently, the presented work has covered and contributed to the realization of all levels of interest in
Figure 1, except for the subsystem design space level. The outcome of the approach is intended to be used in conceptual design of new aerospace systems. However, the approach is kept general as derived functions also can be fulfilled by SoSs including nonairborne systems as well.
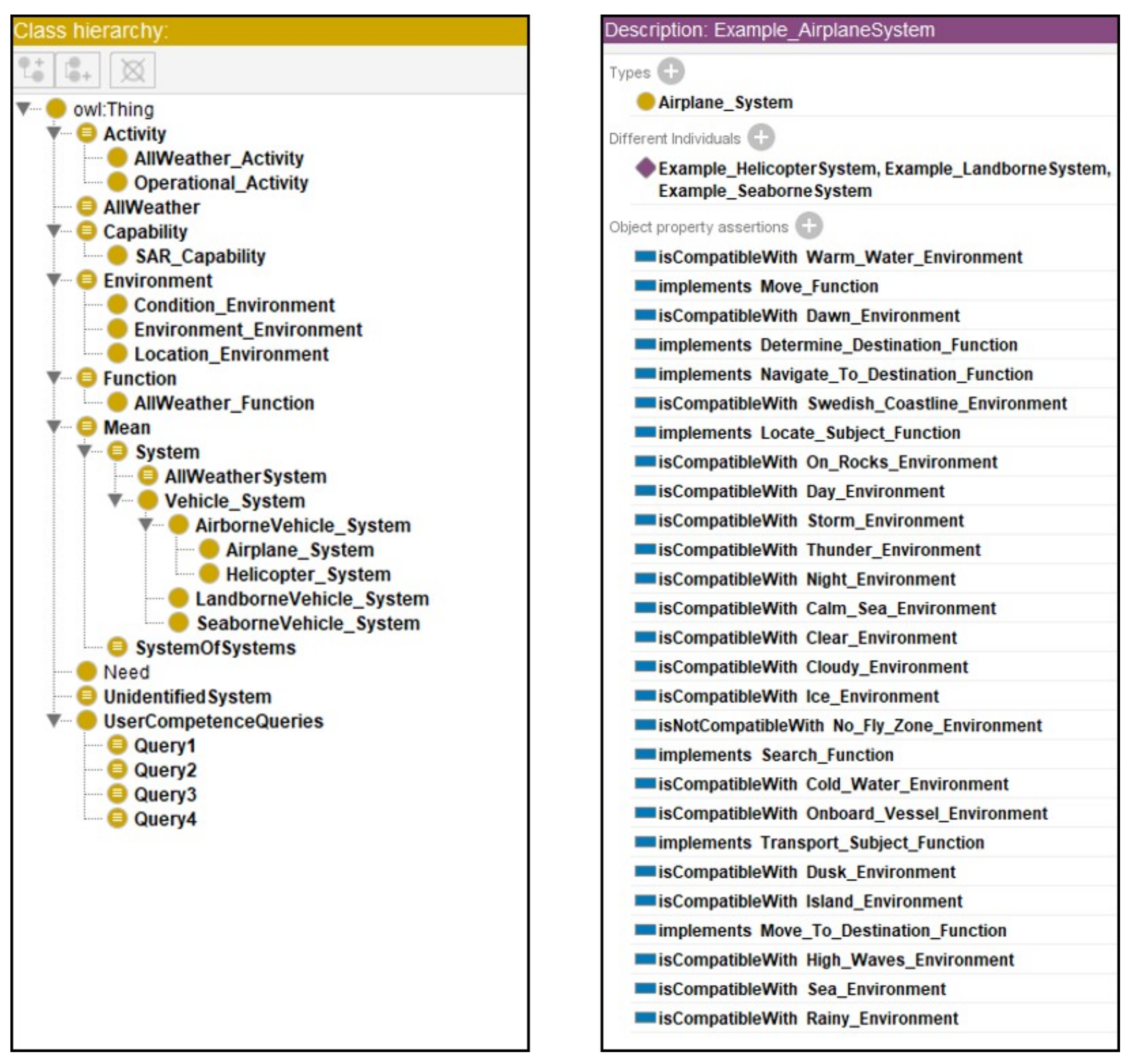
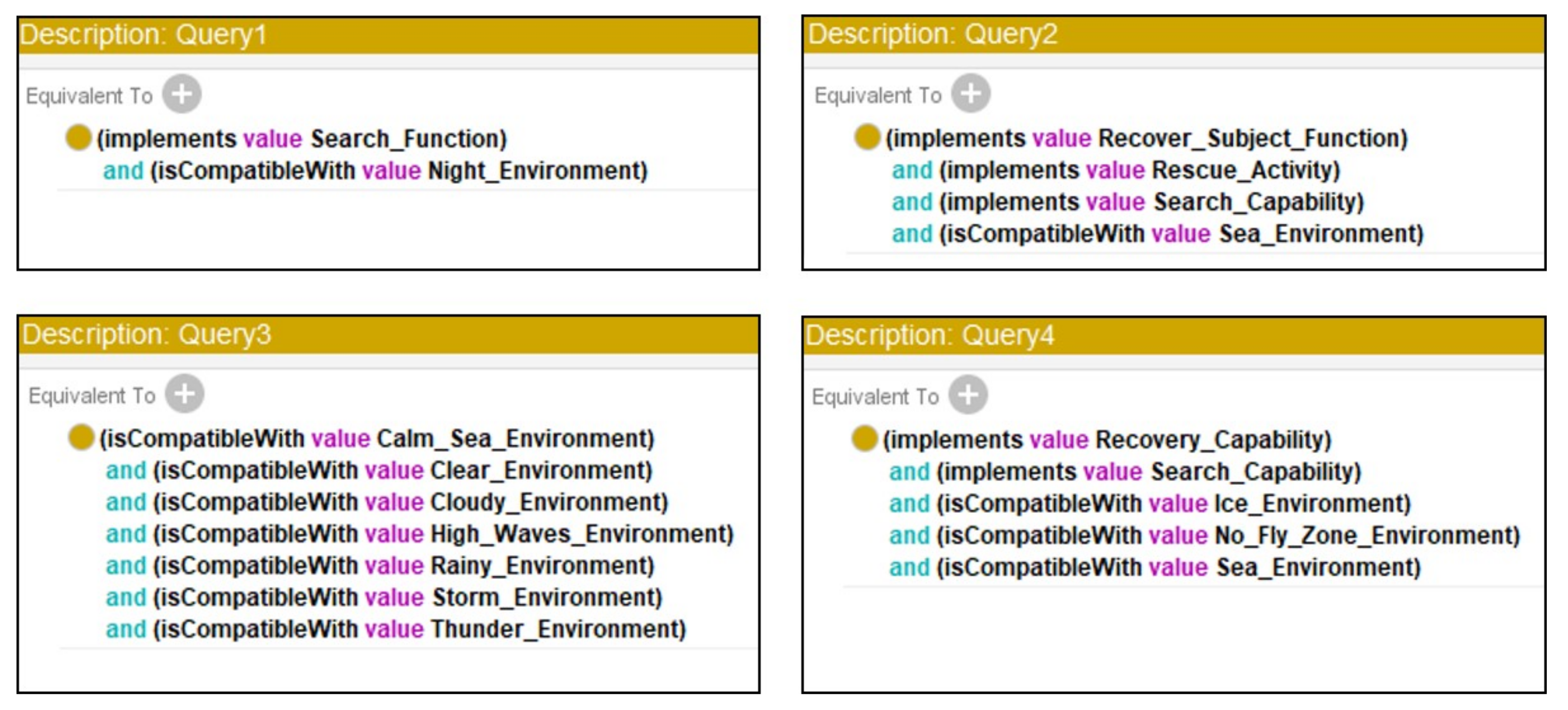
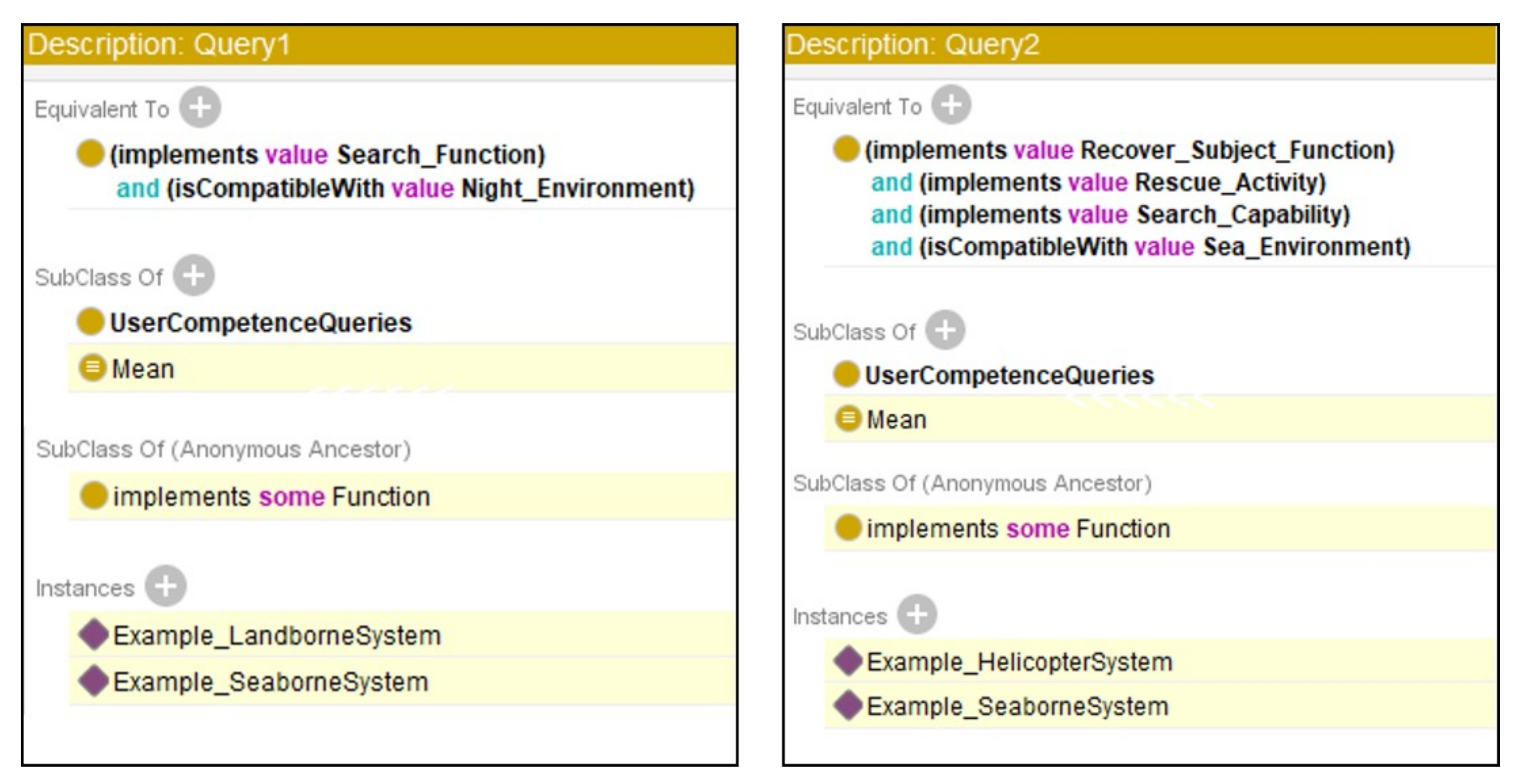
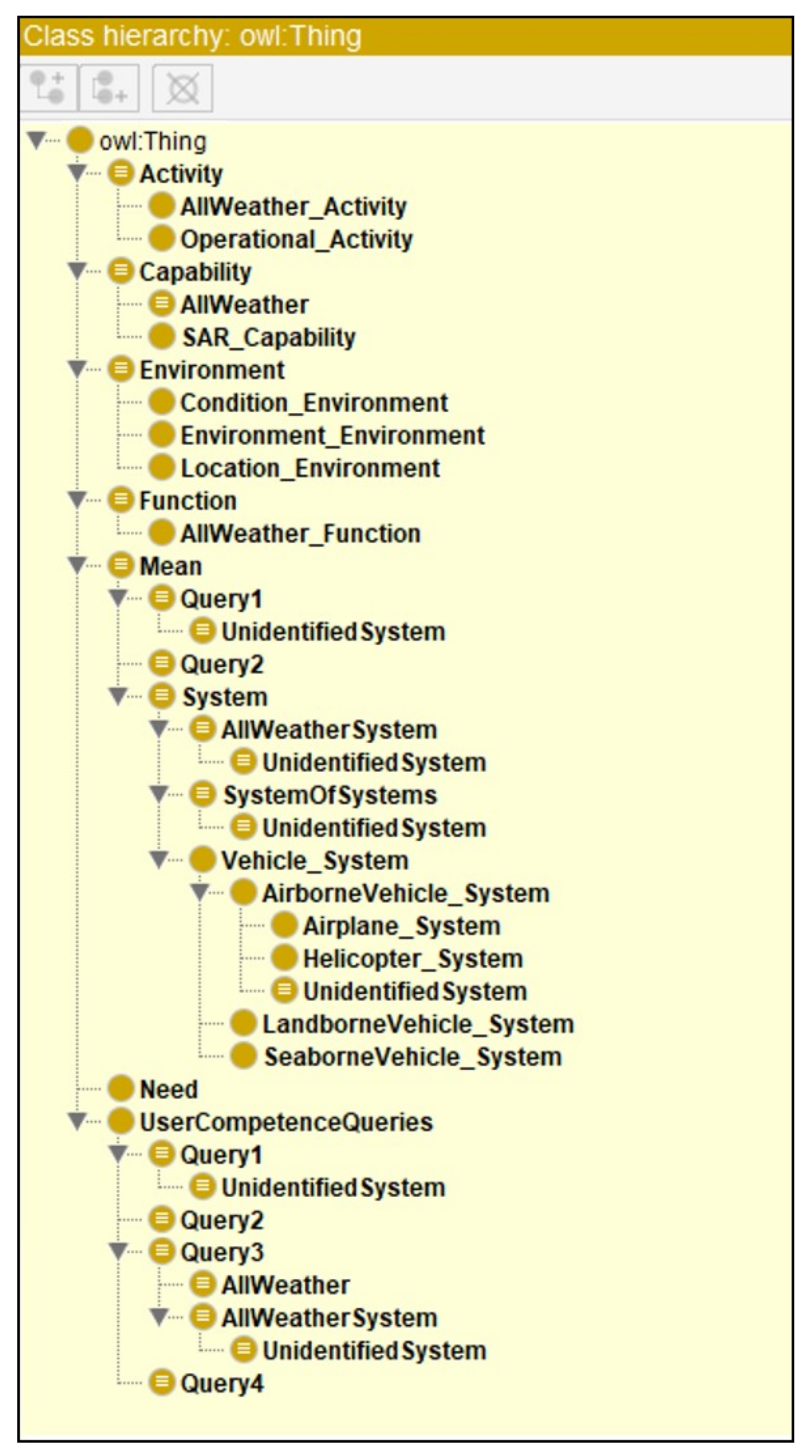
As the results from the user competence queries show, the available design space of alternatives is captured in the inferred suitable instances and subclasses of the different query classes. The queries both generate and reduce the available design spaces through reasoning. The descriptions for these suitable instances and subclasses could be extracted from the inferred ontology to enable further analyses with ABS, for example, as illustrated in [
38]. However, this presumes that the represented instances in the ontology have the necessary information to sufficiently describe the ABS agents. Since no further evaluation of the design space was carried out in this study, the example system individuals from the ontology did not include additional information such as detection range and fuel consumption. Information like this can be added if desired by being represented in relationships to OWL data properties. Data properties can for example describe any parameter for airborne vehicles such as maximum takeoff weight, operational range, cost per hour and more. Reasoning can then be performed to also reduce a design space of existing alternatives based on requirements for specific values of parameters as shown in [
37]. It is consequently possible to query the ontology and design space for all airborne vehicles that have an operational range above a certain number but with a low cost per hour for example. Queries with no inferred instances or subclasses can in this case also be regarded as inputs for a continued design process where the desired data properties correspond to system requirements.
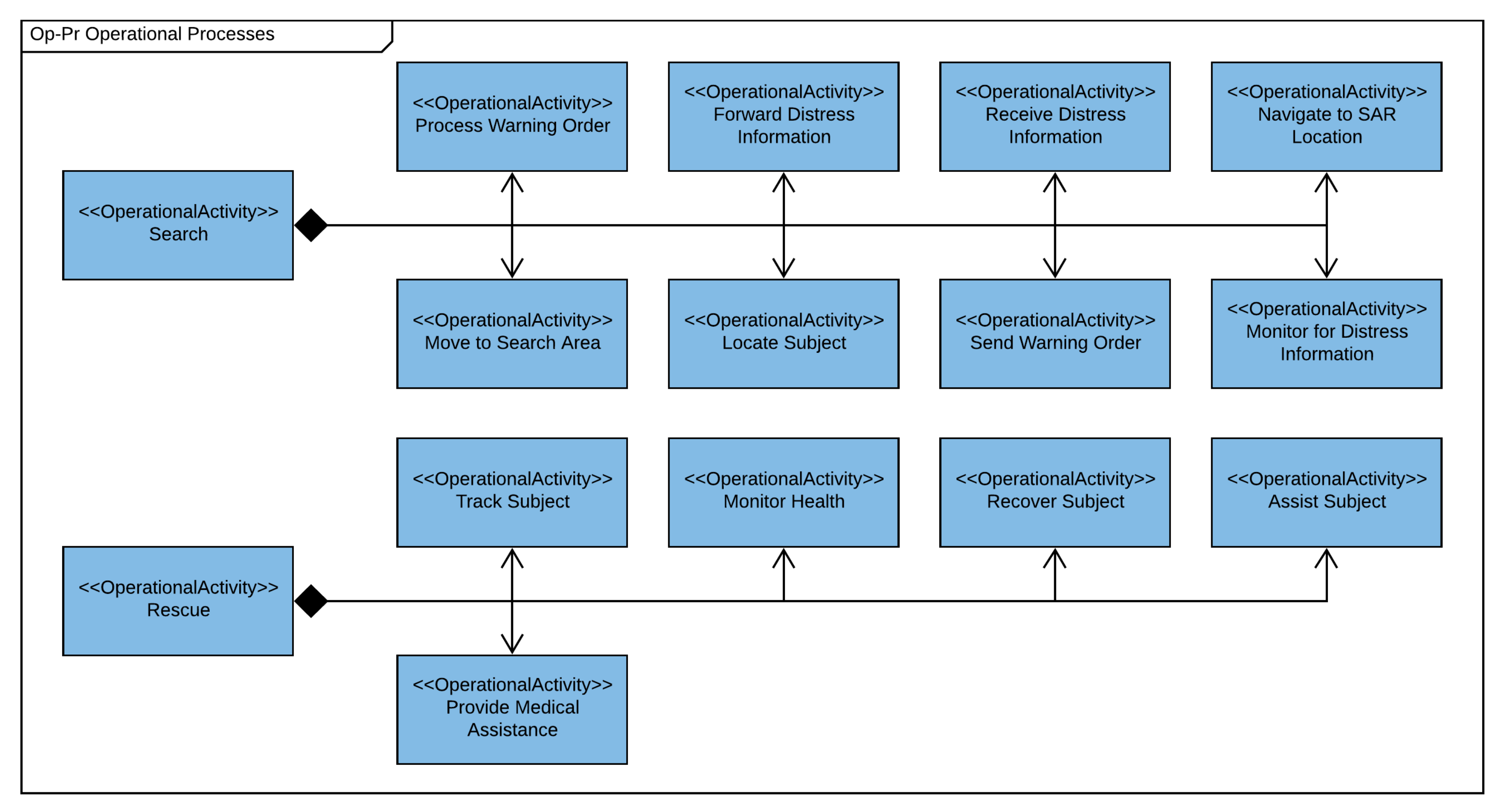
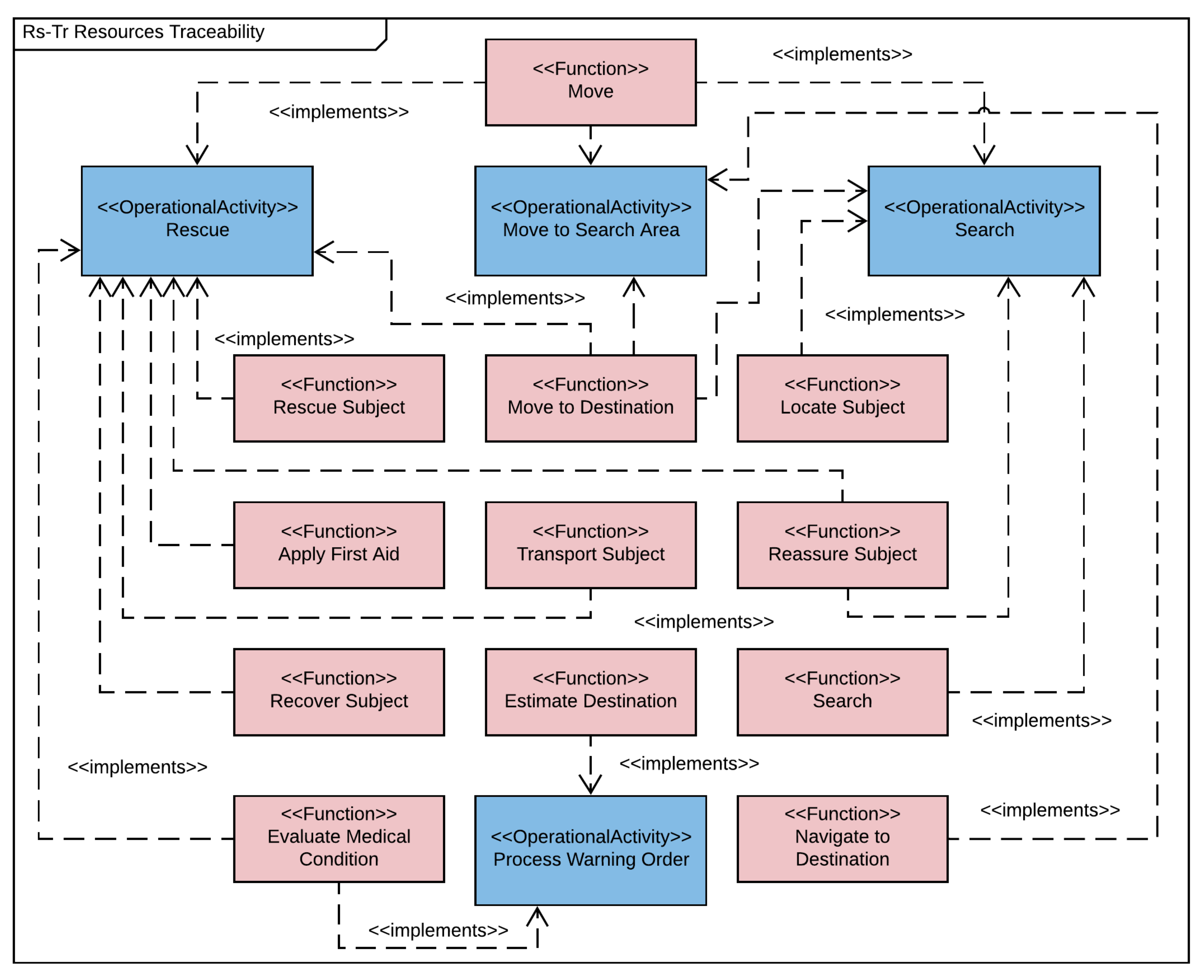
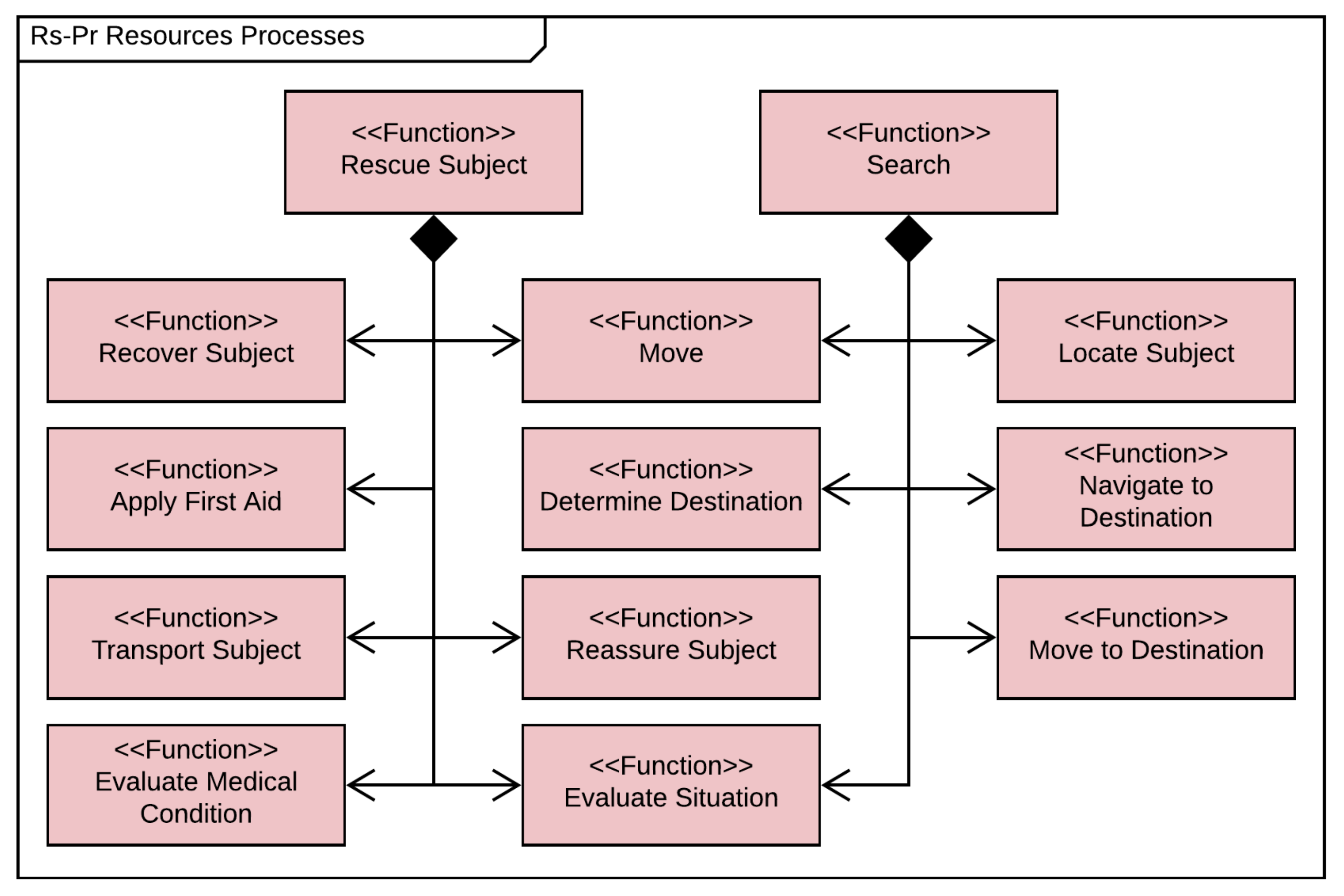
The UAF representation of the SAR system, with its relationships between entities, is very similar to the representation in the ontology model. The reason for using both an architecture framework and an ontology in the approach is that both have their specific advantages. Architecture frameworks provide a structured way to represent information through their various views. Architecture frameworks also indicate what should be modelled and give a perception of the important aspects that must be included in a complex system or SoS. They also divide up the represented system through the various views, which facilitates the visualisation of specific entities and their relationships. Another important area of use for architecture frameworks is analyses of operations and how resources are to be utilised. The UAF breakdown was focused on arriving at the functions to be performed and not specifically on the utilisation of existing resources, such as specific airborne SAR vehicles. The approach consequently shows how the UAF can be used to support aerospace product development from an SoS perspective.
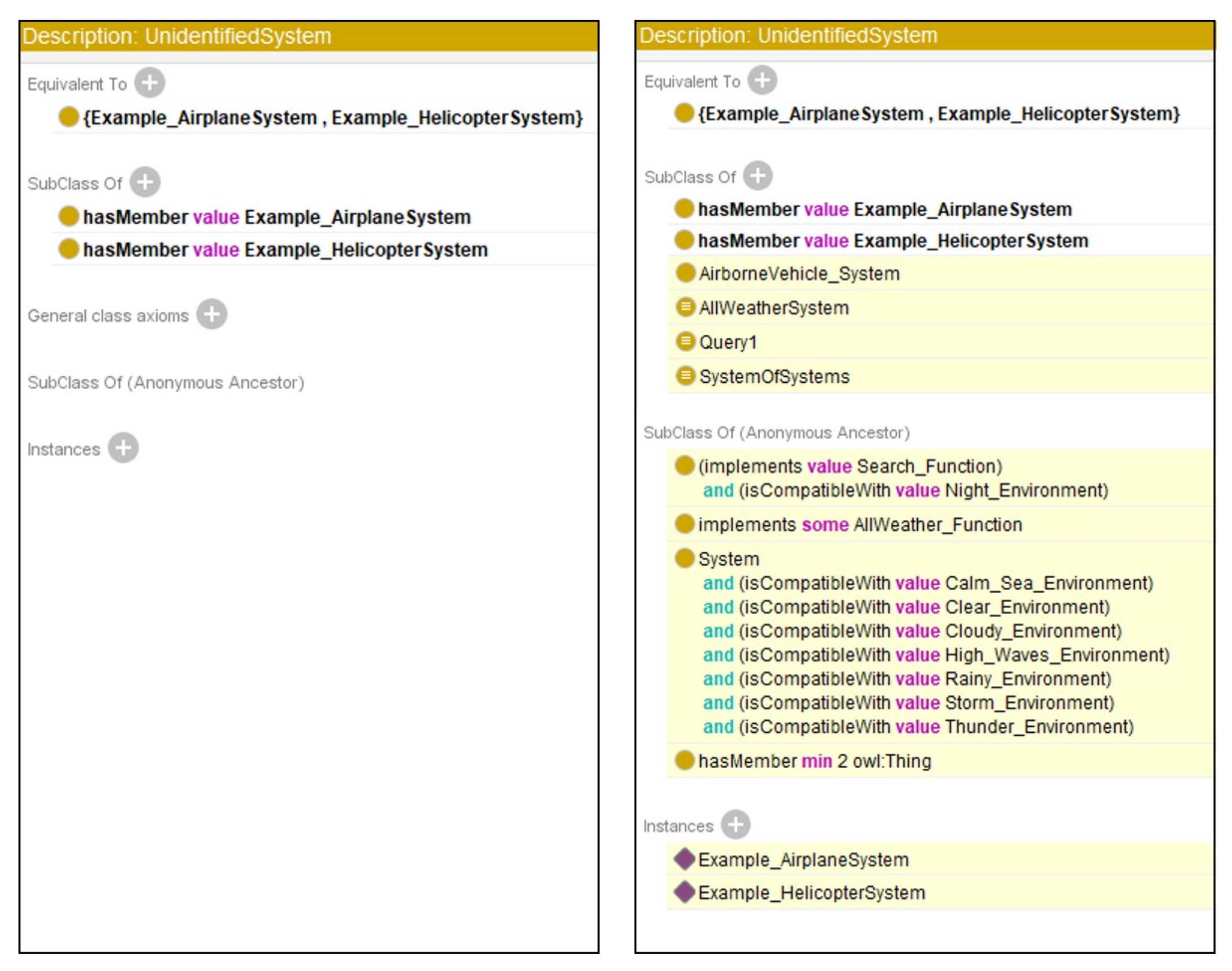
An ontology representation of the information captured in the architecture framework has several advantages. One of these is that a description logic reasoner can process the information, as shown in the previous section. This can indicate both inconsistencies and implicit relationships captured from the architecture framework representation. The additional information added to the ontology could also have been added directly to the UAF representation. However, the ontology model and the reasoning capabilities allow for additional expressiveness. An example of this is the automatic classification of the added SoS class and the UnidentifiedSystem class. Additionally, reasoning provides a way to generate and reduce an available design space based on queries of desired capabilities, performances and more, as seen in the previous section. Another advantage with an ontology is that the scalability is increased. The entities and relationships can be modified or extended as shown, and other existing ontologies can also be included if desired. The open world assumption and the nonunique naming assumption facilitate the interoperability and scalability of information, as mentioned in
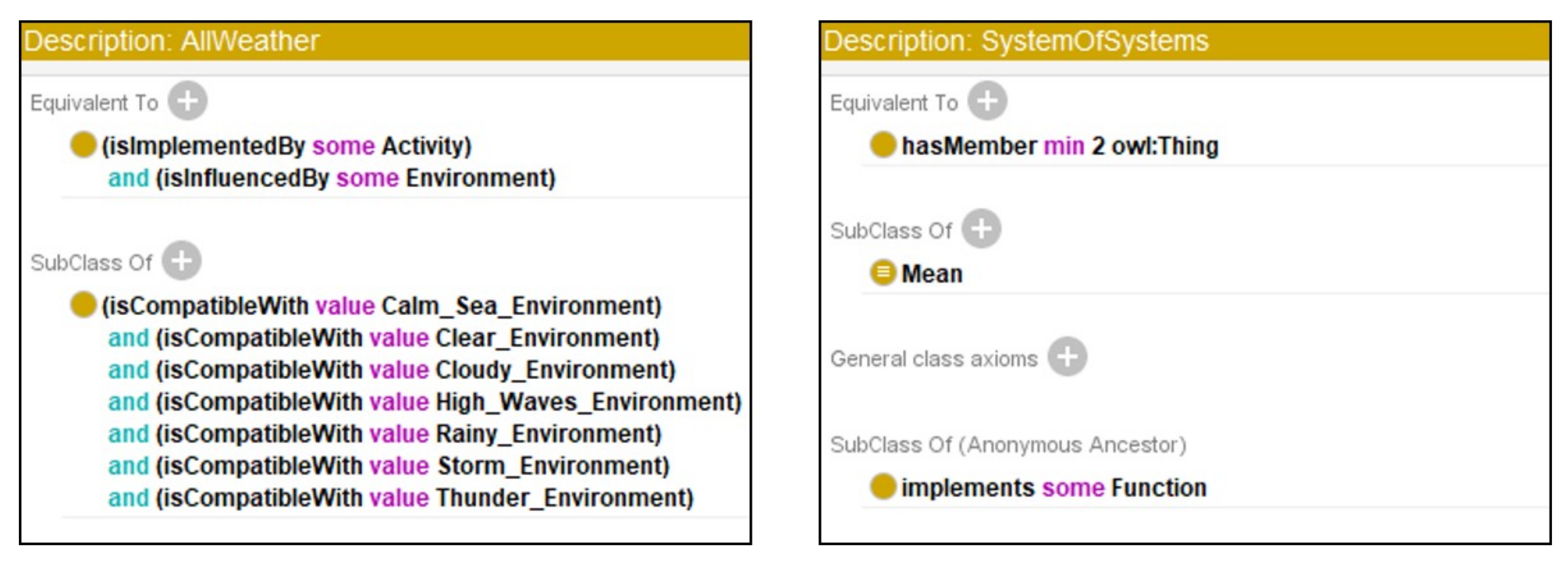
Section 2. However, more implicit relationships lead to increased computational time for reasoning. The SystemofSystems class contained a simple definition of an SoS to show an example of implicit reasoning. A future implementation of this class could include the five characteristic properties from [
4] in the class definition. The reasoner could thereby be used to classify different system concepts as either complex systems or SoS based on fulfilment of the different properties in a more detailed way.
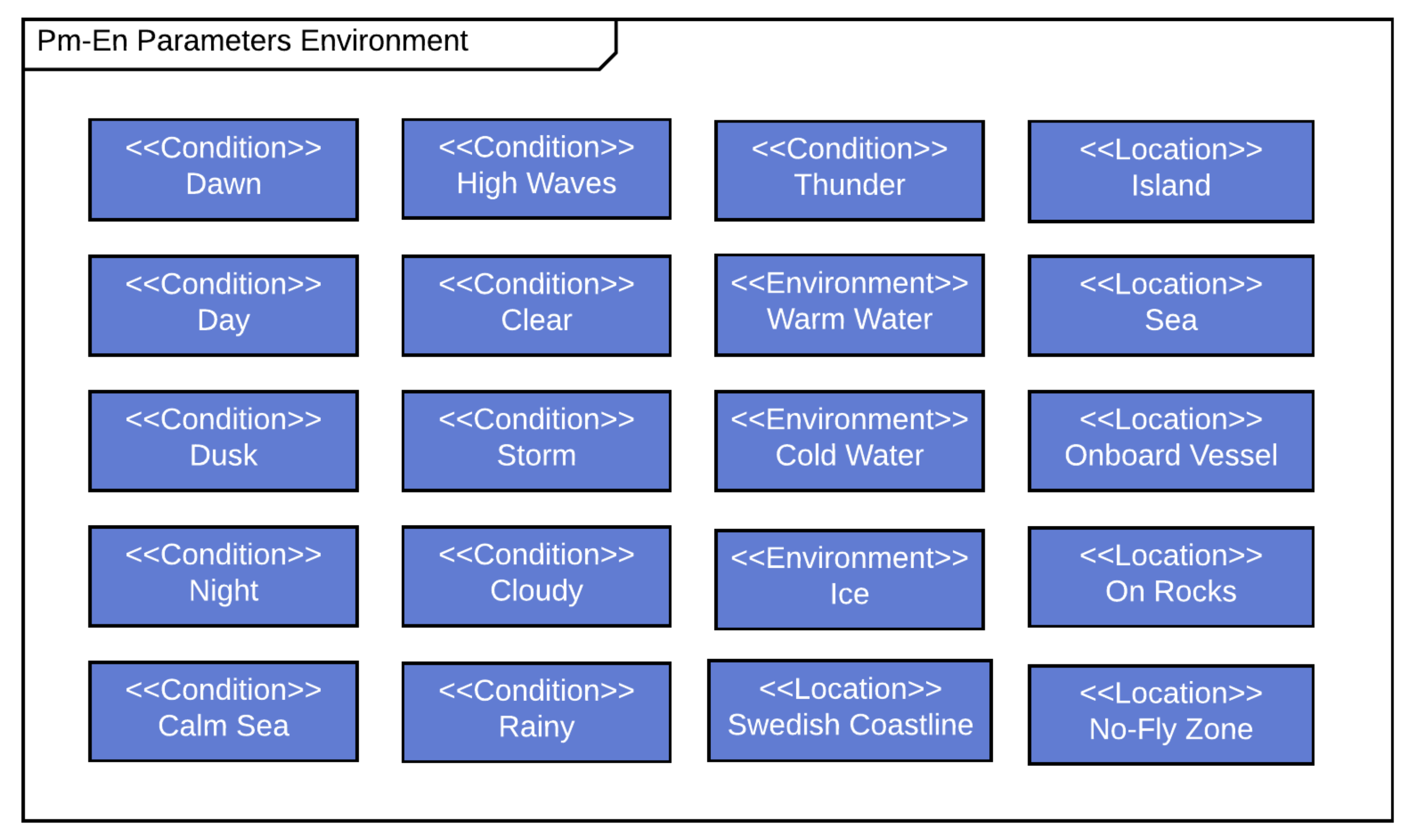
As mentioned before, the Query4 class did not have any inferred individuals or subclasses. Part of the definition for query 4 can, however, be fulfilled by existing alternatives in the ontology. The Example_Helicopter can, for example, fulfil all described conditions except for the no-fly zone environment. Consequently, query 4 could also be fulfilled by an SoS that includes a new system or asset that is capable of getting the rescue subject out of the no-fly zone so that the example helicopter eventually can perform the recover-subject function. An entirely new individual system or asset that fulfils all the conditions must therefore not be developed. However, additional evaluations will of course have to be performed to evaluate the most suitable choice in terms of overall performance, mission cost and success rate, for example.
The SAR example assets that were added to the ontology model were partly based on information from the SMA [
42]. Their definitions were kept relatively simple and general for this case study. Similarly, their relationships with the environmental conditions and functions from the UAF should be seen as examples of how they can be assigned to different represented assets. Not all available SAR helicopter and airplane types will necessarily have all-weather capabilities, for example. More SAR assets can be added to the case study in the future to increase the overall design space. A possibility could be to create and include a domain ontology describing all suitable and available SAR aerospace systems. Such an ontology can then act as a statistical database of SAR aircraft types and their corresponding data. This can then be reasoned upon and used to give more suggestions to fulfil user-defined queries for example. However, reasoning does not give suggestions on the number of particular SAR asset and types to be used. Additional investigations must therefore be performed to investigate possible combinations of aircraft and the number of aircraft in different SoSs using, e.g., ABS, as previously mentioned and shown in [
38]. Subsystem level analyses are an important part of a holistic SoS design process, as shown in
Figure 1. The inclusion of subsystems in the ontology representation is a possible future expansion of the performed case study. Various alternatives of available subsystems can act as additional input for continued design processes using an F/M tree or a matrix of alternatives, for example.
Future work on the presented approach involves additional investigations into both the constituent system and the subsystem levels from
Figure 1. Consequently, the incorporation of traditional SE design approaches and processes is an important topic for future work. Transitioning from the ontology description to matrix-based approaches is one possible way of allowing for additional processing and analysing options on the knowledge captured in the ontology. Such a transition also allows for more advanced numerical operations and optimisations. Requirements are an important consideration in any design process and exist on all levels of interest for an SoS. Certain requirements will only be introduced when solutions to required functions are chosen. Consequently, these types of requirements must be included and considered in a continued design process for constituent systems and subsystems. As mentioned previously, ABS can be used to evaluate the overall SoS and check whether performance requirements can be fulfilled throughout different missions.
Another interesting future venture would be to introduce new constituent systems and subsystems to see whether additional functions, capabilities and overarching needs can be fulfilled by the SoS. The approach presented in this paper has mainly been focused on a top-down approach, taking overall needs as its starting point. Another approach, for example, one that starts from a subsystem or CS level, could correspond to a possible design space expansion where the fulfilment of additional needs could be investigated. A new type of SAR helicopter can, for example, be introduced and investigated. If an analysis indicates that additional capabilities can be fulfilled by the new system, it can consequently be a valuable SAR asset to be acquired. An approach with no specific starting point could be enabled by dynamically activating relevant parts of the represented design space. A top-level ontology structure could perhaps facilitate this. However, no top-level ontology was included in the case study, as mentioned previously. It is possible that a metaontology structure could be utilised to dynamically activate relevant domain ontologies and thereby parts of the design space for designing a new aerospace system, for example. A specific ontology for airborne vehicles could be included if the reasoner infers that it is suitable to fulfil a specific query. A new domain ontology describing airborne vehicles could perhaps partly be created by incorporating the aircraft ontology from [
17] as a subontology. An airborne vehicle ontology could also possibly include a future implementation of a more specific SAR aircraft ontology describing existing assets, such as helicopters and airplanes, as previously discussed. The aircraft ontology from [
17] includes classes for system decomposition and component parameters. It could consequently be used for a continued design process with an F/M tree to allocated solutions to different functions with available aircraft subsystems and components. The outcome could thereafter be used to generate new aircraft concepts to meet the desired functions to be performed for example. In that case, the ontology created for this case study can be used as a middle-level ontology, which describes the relationships between capabilities, activities, functions and the environment in a metaontology structure. This introduces a hierarchical structure of different ontology models but also a consideration of fidelity between the included ontologies.
Additional future work includes investigations of changing overarching needs and surrounding circumstances based on possible future scenarios and forecasts. This can be done to see how the changes influence all levels of the holistic SoS view from
Figure 1 and its related design spaces. The alternatives and functions that are least sensitive to such changes can consequently be regarded as the ones that are most resilient and suitable for further development based on forecasts of the near-term future. Even though the presented approach has covered many parts of the holistic SoS design process from
Figure 1, there are still many considerations to be included on all levels. These include tactics, strategies and concepts of operations (CONOPS), which are essential elements of an SoS and an SoS design space.


 ,
, 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}



















