
A State-of-the-Art Analysis of Obstacle Avoidance Methods from the Perspective of an Agricultural Sprayer UAV’s Operation Scenario



Abstract
:1. Introduction
- The most relevant obstacle detection and collision avoidance techniques are reviewed and discussed, as well as their application perspective with agricultural sprayer UAVs.
- The latest path planning algorithms that are used in agricultural UAVs and the structural challenge of sprayer UAVs are described.
- The operational pattern, detection sensors, obstacles in agricultural farmlands, and control architecture for collision avoidance are thoroughly highlighted to pave the way for future researchers to design their own agricultural sprayer UAV systems.
- The core open challenges and recent technical limitations associated with agricultural sprayer UAVs are enumerated.
1.1. General Background and Related Work
2. Constraints and Challenges of Agricultural Sprayer UAV
2.1. Challenges
2.2. Liquid Load and Sloshing
2.3. Obstacles on Farmland
3. Obstacle Avoidance Scenario
3.1. Avoidance Plan and Control Architecture
3.2. Detection Sensors
3.3. Obstacle Detection Technologies
3.3.1. Sonar Mapping
3.3.2. Radar Mapping
3.3.3. Laser Ranging
3.3.4. Computer Vision
Target Based
Optical Flow Based
Stereo-Vision Based
3.3.5. Fusion
3.4. Obstacle Avoidance Techniques
3.4.1. Bug Algorithm
3.4.2. Artificial Potential Field Algorithm

3.4.3. Collision Cone Method
3.4.4. Fuzzy Logic Algorithm
3.4.5. Vector Field Histogram Method
3.4.6. Neural Network
4. Challenges, Technical Limitations, and Analytical Comparison for Sprayer UAVs
4.1. Obstacle Detection and Collision Avoidance Challenges
- A major obstacle detection challenge arises from severe weather conditions and environments with changing illumination conditions. Windy environments and fog can obscure the detection sensors or cameras, which render the processed data inadequate for obstacle avoidance. Even though this challenge can be resolved with the use of radar, which has no problems detecting in fog, rain, or heavy snow, a major drawback of the radar is its limited lateral vision. In other words, the radar only covers a relatively small angular section of about 15 degrees. To enhance lateral vision, multiple sensors have to be employed, which complicates the system. Thus, in order to measure an accurate reconstruction of the environment in such unfavorable conditions, robust algorithms have to be developed to effectively detect and classify the obstacle.
- Obstacle avoidance techniques, such as Neural Network and Fuzzy Logic, require the extraction of hierarchical abstractions from preprocessed data used throughout the training or learning stages, and the ability of generalization relies on the availability of a large dataset. As a drawback, the large computational cost is a major challenge and has to be highlighted.
- Realistically, most of the obstacle detection algorithms have to be trained offline through simulation analysis before they are integrated into the sprayer UAV system. The huge gap between real and virtually simulated environments limits the applicability of offline simulation policies to the real world. The development of a realistic virtual dataset is still an open challenge.
- Accuracy of temporal and spatial alignments among different sensors used in the sprayer UAV system also impacts the quality of the collected data.
4.2. Other Challenges
- For agricultural sprayer UAVs, spray deposition and coverage are a primary concern, and these parameters are directly related to the drone weight and payload. Moreover, there is always a trade-off between payload and cost, and reliability should be maintained when selecting the type of agricultural sprayer UAV. In most instances, the selection is between single-rotor and multi-rotor. However, quadrotors, which have several spraying limitations, are the preferred choice for agricultural sprayer UAVs.
- Taking into consideration the current stage of sprayer UAV technology, the high cost of the intelligent sensors and that of the UAV system is a major issue. Improvements in this area will enable farmers to reap more from the use of sprayer UAVs for remote sensing in precision spraying.
- Even though the use of UAVs for agricultural spraying is increasing, several limitations that prevent wider usage exist. Among these limitations is the absence of a standardized workflow, which leads to the use of ad-hoc procedures for deploying agricultural sprayer UAVs, a fact that discourages stakeholders.
- As agricultural sprayer UAVs require data-intensive algorithms for the processing of the images acquired, expertise in the field of autonomous flight is usually needed. This suggests that the average farmer will require training or may be compelled to hire experts to assist in the image processing, which may be costly. This may prohibit the adoption of agricultural sprayer UAVs from farmers with less technical expertise.
- Most agricultural sprayer UAVs have a short flight time, usually from 10 min to barely half an hour. The sprayer UAVs that can offer a longer flight time are relatively expensive. Moreover, the effective usage of a sprayer UAV is mostly prone to climatic conditions. For instance, during windy or rainy days, the flight operation has to be postponed.
4.3. Avoidance Technique Comparison
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Tsouros, D.C.; Bibi, S.; Sarigiannidis, P.G. A Review on UAV-Based Applications for Precision Agriculture. Information 2019, 10, 349. [Google Scholar] [CrossRef] [Green Version]
- Mogili, U.M.R.; Deepak, B.B.V.L. Review on Application of Drone Systems in Precision Agriculture. Procedia Comput. Sci. 2018, 133, 502–509. [Google Scholar] [CrossRef]
- Marino, S.; Alvino, A. Detection of Spatial and Temporal Variability of Wheat Cultivars by High-Resolution Vegetation Indices. Agronomy 2019, 9, 226. [Google Scholar] [CrossRef] [Green Version]
- Surový, P.; Almeida Ribeiro, N.; Panagiotidis, D. Estimation of positions and heights from UAV-sensed imagery in tree plantations in agrosilvopastoral systems. Int. J. Remote Sens. 2018, 39, 4786–4800. [Google Scholar] [CrossRef]
- Cilia, C.; Panigada, C.; Rossini, M.; Meroni, M.; Busetto, L.; Amaducci, S.; Boschetti, M.; Picchi, V.; Colombo, R. Nitrogen Status Assessment for Variable Rate Fertilization in Maize through Hyperspectral Imagery. Remote Sens. 2014, 6, 6549–6565. [Google Scholar] [CrossRef] [Green Version]
- Zaman-Allah, M.; Vergara, O.; Araus, J.L.; Tarekegne, A.; Magorokosho, C.; Zarco-Tejada, P.J.; Hornero, A.; Alba, A.H.; Das, B.; Craufurd, P.; et al. Unmanned aerial platform-based multi-spectral imaging for field phenotyping of maize. Plant Methods 2015, 11, 35. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chang, A.; Jung, J.; Maeda, M.M.; Landivar, J. Crop height monitoring with digital imagery from Unmanned Aerial System (UAS). Comput. Electron. Agric. 2017, 141, 232–237. [Google Scholar] [CrossRef]
- Honkavaara, E.; Kaivosoja, J.; Mäkynen, J.; Pellikka, I.; Pesonen, L.; Saari, H.; Salo, H.; Hakala, T.; Marklelin, L.; Rosnell, T. Hyperspectral reflectance signatures and point clouds for precision agriculture by light weight UAV imaging system. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, 7, 353–358. [Google Scholar] [CrossRef] [Green Version]
- Pflanz, M.; Nordmeyer, H.; Schirrmann, M. Weed Mapping with UAS Imagery and a Bag of Visual Words Based Image Classifier. Remote Sens. 2018, 10, 1530. [Google Scholar] [CrossRef] [Green Version]
- Rasmussen, J.; Nielsen, J.; Garcia-Ruiz, F.; Christensen, S.; Streibig, J.C.; Lotz, B. Potential uses of small unmanned aircraft systems (UAS) in weed research. Weed Res. 2013, 53, 242–248. [Google Scholar] [CrossRef]
- Rahnemoonfar, M.; Sheppard, C. Deep Count: Fruit Counting Based on Deep Simulated Learning. Sensors 2017, 17, 905. [Google Scholar] [CrossRef] [Green Version]
- Sarwar, M. The killer chemicals as controller of agriculture insect pests: The conventional insecticides. Int. J. Chem. Biomol. Sci. 2015, 1, 141–147. [Google Scholar]
- Bhattacharyya, A.; Duraisamy, P.; Govindarajan, M.; Buhroo, A.A.; Prasad, R. Nano-biofungicides: Emerging trend in insect pest control. In Advances and Applications through Fungal Nanobiotechnology; Springer: Berlin/Heidelberg, Germany, 2016; pp. 307–319. [Google Scholar] [CrossRef]
- Perez-Lozano, T. Spatial planning: A configuration space approach. IEEE Trans. Comput. 1983, 32. [Google Scholar] [CrossRef]
- Schrum, P.B.; Verosky, M.A.; Krygowski, D.J. Portable Pressurized Sprayer. U.S. Patent 8,985,482, 24 March 2015. [Google Scholar]
- Baker, W.L. Portable Battery Powered Sprayer. U.S. Patent 4,801,088, 31 January 1989. [Google Scholar]
- Abubakar, Y.; Tijjani, H.; Egbuna, C.; Adetunji, C.O.; Kala, S.; Kryeziu, T.L.; Ifemeje, J.C.; Patrick-Iwuanyanwu, K.C. Pesticides, History, and Classification. In Natural Remedies for Pest, Disease and Weed Control; Elsevier: Amsterdam, The Netherlands, 2020; pp. 29–42. [Google Scholar] [CrossRef]
- Bencko, V.; Yan Li Foong, F. The history of arsenical pesticides and health risks related to the use of Agent Blue. Ann. Agric. Environ. Med. 2017, 24, 312–316. [Google Scholar] [CrossRef]
- Alavanja, M.C.; Samanic, C.; Dosemeci, M.; Lubin, J.; Tarone, R.; Lynch, C.F.; Knott, C.; Thomas, K.; Hoppin, J.A.; Barker, J.; et al. Use of agricultural pesticides and prostate cancer risk in the Agricultural Health Study cohort. Am. J. Epidemiol. 2003, 157, 800–814. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Maddikunta, P.K.R.; Hakak, S.; Alazab, M.; Bhattacharya, S.; Gadekallu, T.R.; Khan, W.Z.; Pham, Q.V. Unmanned aerial vehicles in smart agriculture: Applications, requirements, and challenges. IEEE Sens. J. 2021. [Google Scholar] [CrossRef]
- Pederi, Y.; Cheporniuk, H. Unmanned Aerial Vehicles and New Technological Methods of Monitoring and Crop Protection in Precision Agriculture. In Proceedings of the 2015 IEEE International Conference Actual Problems of Unmanned Aerial Vehicles Developments (APUAVD), Kyiv, Ukraine, 13–15 October 2015; IEEE: Kyiv, Ukraine, 2015; pp. 298–301. [Google Scholar] [CrossRef]
- Lan, Y.; Shengde, C.; Fritz, B.K. Current status and future trends of precision agricultural aviation technologies. Int. J. Agric. Biol. Eng. 2017, 10, 1–17. [Google Scholar] [CrossRef]
- Kulbacki, M.; Segen, J.; Knieć, W.; Klempous, R.; Kluwak, K.; Nikodem, J.; Kulbacka, J.; Serester, A. Survey of Drones for Agriculture Automation from Planting to Harvest. In Proceedings of the 2018 IEEE 22nd International Conference on Intelligent Engineering Systems (INES), Las Palmas de Gran Canaria, Spain, 21–23 June 2018; IEEE: Las Palmas de Gran Canaria, Spain, 2018; pp. 000353–000358. [Google Scholar] [CrossRef]
- Durham, K.; Giles, R.C.B. Deployment and Performance of a UAV for Crop Spraying. Chem. Eng. Trans. 2015, 44, 307–312. [Google Scholar] [CrossRef]
- Faiçal, B.S.; Freitas, H.; Gomes, P.H.; Mano, L.Y.; Pessin, G.; de Carvalho, A.C.P.L.F.; Krishnamachari, B.; Ueyama, J. An adaptive approach for UAV-based pesticide spraying in dynamic environments. Comput. Electron. Agric. 2017, 138, 210–223. [Google Scholar] [CrossRef]
- Kim, J.; Kim, S.; Ju, C.; Son, H.I. Unmanned Aerial Vehicles in Agriculture: A Review of Perspective of Platform, Control, and Applications. IEEE Access 2019, 7, 105100–105115. [Google Scholar] [CrossRef]
- Shilin, W.; Jianli, S.; Xiongkui, H.; Le, S.; Xiaonan, W.; Changling, W.; Zhichong, W.; Yun, L. Performances evaluation of four typical unmanned aerial vehicles used for pesticide application in China. Int. J. Agric. Biol. Eng. 2017, 10, 22–31. [Google Scholar] [CrossRef] [Green Version]
- Yanliang, Z.; Qi, L.; Wei, Z. Design and test of a six-rotor unmanned aerial vehicle (UAV) electrostatic spraying system for crop protection. Int. J. Agric. Biol. Eng. 2017, 10, 68–76. [Google Scholar] [CrossRef]
- Lou, Z.; Xin, F.; Han, X.; Lan, Y.; Duan, T.; Fu, W. Effect of Unmanned Aerial Vehicle Flight Height on Droplet Distribution, Drift and Control of Cotton Aphids and Spider Mites. Agronomy 2018, 8, 187. [Google Scholar] [CrossRef] [Green Version]
- Qin, W.; Xue, X.; Zhang, S.; Gu, W.; Wang, B. Droplet deposition and efficiency of fungicides sprayed with small UAV against wheat powdery mildew. Int. J. Agric. Biol. Eng. 2018, 11, 27–32. [Google Scholar] [CrossRef] [Green Version]
- Wen, S.; Zhang, Q.; Deng, J.; Lan, Y.; Yin, X.; Shan, J. Design and Experiment of a Variable Spray System for Unmanned Aerial Vehicles Based on PID and PWM Control. Appl. Sci. 2018, 8, 2482. [Google Scholar] [CrossRef] [Green Version]
- Yallappa, D.; Veerangouda, M.; Maski, D.; Palled, V.; Bheemanna, M. Development and Evaluation of Drone Mounted Sprayer for Pesticide Applications to Crops. In Proceedings of the 2017 IEEE Global Humanitarian Technology Conference (GHTC), San Jose, CA, USA, 19–23 October 2017; IEEE: San Jose, CA, USA, 2017; pp. 1–7. [Google Scholar] [CrossRef]
- Hentschke, M.; Pignaton de Freitas, E.; Hennig, C.; Girardi da Veiga, I. Evaluation of Altitude Sensors for a Crop Spraying Drone. Drones 2018, 2, 25. [Google Scholar] [CrossRef] [Green Version]
- Chen, P.; Lan, Y.; Huang, X.; Qi, H.; Wang, G.; Wang, J.; Wang, L.; Xiao, H. Droplet deposition and control of planthoppers of different nozzles in two-stage rice with a quadrotor unmanned aerial vehicle. Agronomy 2020, 10, 303. [Google Scholar] [CrossRef] [Green Version]
- Basso, M.; Stocchero, D.; Ventura Bayan Henriques, R.; Vian, A.L.; Bredemeier, C.; Konzen, A.A.; Pignaton de Freitas, E. Proposal for an Embedded System Architecture Using a GNDVI Algorithm to Support UAV-Based Agrochemical Spraying. Sensors 2019, 19, 5397. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Huang, S.; Teo, R.S.H.; Tan, K.K. Collision avoidance of multi unmanned aerial vehicles: A review. Annu. Rev. Control 2019, 48, 147–164. [Google Scholar] [CrossRef]
- Sedighi, K.H.; Ashenayi, K.; Manikas, T.W.; Wainwright, R.L.; Tai, H.-M. Autonomous Local Path Planning for a Mobile Robot Using a Genetic Algorithm. In Proceedings of the 2004 Congress on Evolutionary Computation (IEEE Cat. No. 04TH8753), Portland, OR, USA, 19–23 June 2004; IEEE: Portland, OR, USA, 2004; pp. 1338–1345. [Google Scholar] [CrossRef] [Green Version]
- Marin-Plaza, P.; Hussein, A.; Martin, D.; Escalera, A.d.l. Global and Local Path Planning Study in a ROS-Based Research Platform for Autonomous Vehicles. J. Adv. Transp. 2018, 2018, 6392697. [Google Scholar] [CrossRef]
- Warren, C.W. Fast Path Planning Using Modified A* Method. In Proceedings of the IEEE International Conference on Robotics and Automation, Atlanta, GA, USA, 2–6 May 1993; IEEE: Atlanta, GA, USA, 1993; pp. 662–667. [Google Scholar] [CrossRef]
- Cui, J.; Zhang, Y.; Ma, S.; Yi, Y.; Xin, J.; Liu, D. Path planning algorithms for power transmission line inspection using unmanned aerial vehicles. In Proceedings of the 2017 29th Chinese Control And Decision Conference (CCDC), Chongqing, China, 28–30 May 2017; IEEE: Chongqing, China, 2017; pp. 2304–2309. [Google Scholar] [CrossRef]
- Borenstein, J.; Koren, Y. The vector field histogram-fast obstacle avoidance for mobile robots. IEEE Trans. Robot. Autom. 1991, 7, 278–288. [Google Scholar] [CrossRef] [Green Version]
- Lozano-Pérez, T.; Wesley, M.A. An algorithm for planning collision-free paths among polyhedral obstacles. Commun. ACM 1979, 22, 560–570. [Google Scholar] [CrossRef]
- Bellingham, J.; Tillerson, M.; Richards, A.; How, J.P. Multi-task allocation and path planning for cooperating UAVs. In Cooperative Control: Models, Applications and Algorithms; Springer: Berlin/Heidelberg, Germany, 2003; pp. 23–41. [Google Scholar] [CrossRef]
- Minguez, J.; Montano, L. Nearness Diagram (ND) Navigation: Collision Avoidance in Troublesome Scenarios. IEEE Trans. Robot. Autom. 2004, 20, 45–59. [Google Scholar] [CrossRef] [Green Version]
- Chakravarthy, A.; Ghose, D. Obstacle avoidance in a dynamic environment: A collision cone approach. IEEE Trans. Syst. ManCybern. Part A Syst. Hum. 1998, 28, 562–574. [Google Scholar] [CrossRef] [Green Version]
- Fiorini, P.; Shiller, Z. Motion Planning in Dynamic Environments Using Velocity Obstacles. Int. J. Robot. Res. 2016, 17, 760–772. [Google Scholar] [CrossRef]
- Ajith Kumar, B.; Ghose, D. Radar-assisted collision avoidance/guidance strategy for planar flight. IEEE Trans. Aerosp. Electron. Syst. 2001, 37, 77–90. [Google Scholar] [CrossRef] [Green Version]
- Olivares-Mendez, M.A.; Mejias, L.; Campoy, P.; Mellado-Bataller, I. Cross-Entropy Optimization for Scaling Factors of a Fuzzy Controller: A See-and-Avoid Approach for Unmanned Aerial Systems. J. Intell. Robot. Syst. 2012, 69, 189–205. [Google Scholar] [CrossRef] [Green Version]
- Richards, A.; How, J.P. Aircraft Trajectory Planning with Collision Avoidance Using Mixed Integer Linear Programming. In Proceedings of the 2002 American Control Conference (IEEE Cat. No. CH37301), Anchorage, AK, USA, 8–10 May 2002; IEEE: Anchorage, AK, USA, 2002; pp. 1936–1941. [Google Scholar] [CrossRef]
- Wang, X.; Yadav, V.; Balakrishnan, S.N. Cooperative UAV Formation Flying With Obstacle/Collision Avoidance. IEEE Trans. Control Syst. Technol. 2007, 15, 672–679. [Google Scholar] [CrossRef]
- Park, J.; Baek, H. Stereo vision based obstacle collision avoidance for a quadrotor using ellipsoidal bounding box and hierarchical clustering. Aerosp. Sci. Technol. 2020, 103, 105882. [Google Scholar] [CrossRef]
- Mukhtar, A.; Xia, L.; Tang, T.B. Vehicle detection techniques for collision avoidance systems: A review. IEEE Trans. Intell. Transp. Syst. 2015, 16, 2318–2338. [Google Scholar] [CrossRef]
- Rybus, T. Obstacle avoidance in space robotics: Review of major challenges and proposed solutions. Prog. Aerosp. Sci. 2018, 101, 31–48. [Google Scholar] [CrossRef]
- Lu, Y.; Xue, Z.; Xia, G.-S.; Zhang, L. A survey on vision-based UAV navigation. GEO Spat. Inf. Sci. 2018, 21, 21–32. [Google Scholar] [CrossRef] [Green Version]
- Shabbir, J.; Anwer, T. A survey of deep learning techniques for mobile robot applications. arXiv 2018, arXiv:07608. [Google Scholar]
- Faiçal, B.S.; Costa, F.G.; Pessin, G.; Ueyama, J.; Freitas, H.; Colombo, A.; Fini, P.H.; Villas, L.; Osório, F.S.; Vargas, P.A.; et al. The use of unmanned aerial vehicles and wireless sensor networks for spraying pesticides. J. Syst. Archit. 2014, 60, 393–404. [Google Scholar] [CrossRef]
- Bae, Y.; Koo, Y.M. Flight attitudes and spray patterns of a roll-balanced agricultural unmanned helicopter. Appl. Eng. Agric. Avoid. Algorithm Based Monocular Vis. Quad Rotor 2013, 29, 675–682. [Google Scholar] [CrossRef]
- Giles, D.; Billing, R. Deployment and Performance of an Unmanned Aerial Vehicle for Spraying of Specialty Crops. In Proceedings of the International Conference of Agricultural Engineering, Zurich, Switzerland, 6 July 2014; p. C0589. [Google Scholar]
- Oksanen, T.; Visala, A. Path planning algorithms for agricultural machines. Agric. Eng. Int. CIGR J. 2007. Available online: file:///C:/Users/MDPI/AppData/Local/Temp/940-Article%20Text-934-1-10-20080428-1.pdf (accessed on 1 April 2021).
- Wang, C.; Song, J.; He, X.; Wang, Z.; Wang, S.; Meng, Y. Effect of flight parameters on distribution characteristics ofpesticide spraying droplets deposition of plant-protection unmanned aerial vehicle. Trans. Chin. Soc. Agric. Eng. 2017, 33, 109–116. [Google Scholar]
- Fritz, B.K.; Czaczyk, Z.; Hoffmann, W.C. Model based decision support system of operating settings for MMAT nozzles. J. Plant Prot. Res. 2016, 56, 178–185. [Google Scholar] [CrossRef]
- De Bruin, S.; Lerink, P.; Klompe, A.; van der Wal, T.; Heijting, S. Spatial optimisation of cropped swaths and field margins using GIS. Comput. Electron. Agric. 2009, 68, 185–190. [Google Scholar] [CrossRef]
- Oksanen, T.; Visala, A. Coverage path planning algorithms for agricultural field machines. J. Field Robot. 2009, 26, 651–668. [Google Scholar] [CrossRef]
- Hofstee, J.; Spätjens, L.; Ijken, H. Optimal Path Planning for Field Operations. In Proceedings of the Joint International Agricultural Conference, (JIAC2009), Wageningen, The Netherlands, 6–8 July 2009; pp. 511–519. [Google Scholar]
- Hameed, I.A.; Bochtis, D.D.; Sørensen, C.G.; Nøremark, M. Automated generation of guidance lines for operational field planning. Biosyst. Eng. 2010, 107, 294–306. [Google Scholar] [CrossRef]
- Bochtis, D.D.; Sørensen, C.G. The vehicle routing problem in field logistics part I. Biosyst. Eng. 2009, 104, 447–457. [Google Scholar] [CrossRef]
- Bochtis, D.D.; Sørensen, C.G.; Busato, P.; Berruto, R. Benefits from optimal route planning based on B-patterns. Biosyst. Eng. 2013, 115, 389–395. [Google Scholar] [CrossRef]
- Scheuren, S.; Stiene, S.; Hartanto, R.; Hertzberg, J.; Reinecke, M. Spatio-temporally constrained planning for cooperative vehicles in a harvesting scenario. Ki-Künstliche Intell. 2013, 27, 341–346. [Google Scholar] [CrossRef]
- Vasquez Gomez, J.I.; Melchor, M.M.; Herrera Lozada, J.C. Optimal Coverage Path Planning Based on the Rotating Calipers Algorithm. In Proceedings of the 2017 International Conference on Mechatronics, Electronics and Automotive Engineering (ICMEAE), Cuernavaca, Mexico, 21–24 November 2017; pp. 140–144. [Google Scholar] [CrossRef]
- Torres, M.; Pelta, D.A.; Verdegay, J.L.; Torres, J.C. Coverage path planning with unmanned aerial vehicles for 3D terrain reconstruction. Expert Syst. Appl. 2016, 55, 441–451. [Google Scholar] [CrossRef]
- Zhou, K.; Leck Jensen, A.; Sørensen, C.G.; Busato, P.; Bothtis, D.D. Agricultural operations planning in fields with multiple obstacle areas. Comput. Electron. Agric. 2014, 109, 12–22. [Google Scholar] [CrossRef]
- Moon, S.-W.; Shim, D.H.-C. Study on Path Planning Algorithms for Unmanned Agricultural Helicopters in Complex Environment. Int. J. Aeronaut. Space Sci. 2009, 10, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Wang, K.; Meng, Z.; Wang, L.; Wu, Z.; Wu, Z. Practical Obstacle Avoidance Path Planning for Agriculture UAVs. In Advances and Trends in Artificial Intelligence, Proceedings of theInternational Conference on Industrial, Engineering and Other Applications of Applied Intelligent Systems, Graz, Austria, 9–11 July 2019; Springer: Cham, Switzerland, 2019; pp. 196–203. [Google Scholar] [CrossRef]
- Zhang, X.; Fan, C.; Cao, Z.; Fang, J.; Jia, Y. Novel obstacle-avoiding path planning for crop protection UAV using optimized Dubins curve. Int. J. Agric. Biol. Eng. 2020, 13, 172–177. [Google Scholar] [CrossRef]
- Khorsandi, F.; Ayers, P.D.; Freeland, R.S.; Wang, X. Modeling the effect of liquid movement on the center of gravity calculation of agricultural vehicles. J. Terramech. 2018, 75, 37–48. [Google Scholar] [CrossRef]
- Monaghan, J.J.; Kos, A.; Issa, N. Fluid Motion Generated by Impact. J. Waterw. Port Coast. Ocean Eng. 2003, 129, 250–259. [Google Scholar] [CrossRef]
- Frosina, E.; Senatore, A.; Andreozzi, A.; Fortunato, F.; Giliberti, P. Experimental and Numerical Analyses of the Sloshing in a Fuel Tank. Energies 2018, 11, 682. [Google Scholar] [CrossRef] [Green Version]
- Zang, Y.; Zang, Y.; Zhou, Z.; Gu, X.; Jiang, R.; Kong, L.; He, X.; Luo, X.; Lan, Y. Design and anti-sway performance testing of pesticide tanks in spraying UAVs. Int. J. Agric. Biol. Eng. 2019, 12, 10–16. [Google Scholar] [CrossRef] [Green Version]
- Li, X.Z.J.; Qu, F.; Zhang, W.; Wang, D.; Li, W. Optimal design of anti sway inner cavity structure of agricultural UAV pesticide tank. Trans. Chin. Soc. Agric. Eng. 2017, 33, 72–79. [Google Scholar]
- Yan, G.R.; Rakheja, S.; Siddiqui, K. Baffle Design Analysis for a Road Tanker: Transient Fluid Slosh Approach. SAE Int. J. Commer. Veh. 2008, 1, 397–405. [Google Scholar] [CrossRef]
- Zheng, X.-L.; Li, X.-S.; Ren, Y.-Y.; Wang, Y.-N.; Ma, J. Effects of Transverse Baffle Design on Reducing Liquid Sloshing in Partially Filled Tank Vehicles. Math. Probl. Eng. 2013, 2013, 130570. [Google Scholar] [CrossRef]
- Kandasamy, T. An Analysis of Baffles Designs for Limiting Fluid Slosh in Partly Filled Tank Trucks~!2009-10-29~!2010-04-21~!2010-07-23~! Open Transp. J. 2010, 4, 23–32. [Google Scholar] [CrossRef]
- Spickelmire, J. Liquid Stabilizing Baffle System. U.S. Patent 5,890,618, 6 April 1999. [Google Scholar]
- Taylor, G.L. Anti-Slosh Devices for Damping Oscillation of Liquids in Tanks. U.S. Patent 7,648,749, 19 January 2010. [Google Scholar]
- Lun, S.M.L.J.; Sakulthong, S.; Srigrarom, S. Wind Disturbance Control for V-Tail Y-Shape Quadcopter. In Proceedings of the 2019 First International Symposium on Instrumentation, Control, Artificial Intelligence, and Robotics (ICA-SYMP), Bangkok, Thailand, 16–18 January 2019; IEEE: Bangkok, Thailand, 2019; pp. 195–202. [Google Scholar] [CrossRef]
- Le Nhu Ngoc Thanh, H.; Hong, S.K. Quadcopter Robust Adaptive Second Order Sliding Mode Control Based on PID Sliding Surface. IEEE Access 2018, 6, 66850–66860. [Google Scholar] [CrossRef]
- Freeman, P.K.; Freeland, R.S. Agricultural UAVs in the U.S.: Potential, policy, and hype. Remote Sens. Appl. Soc. Environ. 2015, 2, 35–43. [Google Scholar] [CrossRef]
- Lan, Y.; Chen, S. Current status and trends of plant protection UAV and its spraying technology in China. Int. J. Precis. Agric. Aviat. 2018, 1, 1–9. [Google Scholar] [CrossRef]
- Lan, W.G.B. Overview and development prospects of China’s plant protection drone industry. Agric. Eng. Technol. 2018, 38, 17–27. [Google Scholar] [CrossRef]
- Chen, S.; Lan, Y.; Li, J.; Xu, X.; Wang, Z.; Peng, B. Evaluation and test of effective spraying width of aerial spraying on plant protection UAV. Trans. Chin. Soc. Agric. Eng. 2017, 33, 82–90. [Google Scholar]
- Wang, C.; He, X.; Wang, X.; Wang, Z.; Pan, H.; He, Z. Testing method of spatial pesticide spraying deposition quality balance for unmanned aerial vehicle. Trans. Chin. Soc. Agric. Eng. 2016, 32, 54–61. [Google Scholar] [CrossRef] [Green Version]
- Wang, D.; Zhang, J.; Li, W.; Xiong, B.; Zhang, S.; Zhang, W. Design and test of dynamic variable spraying system of plant protection UAV. Trans. Chin. Soc. Agric. Mach 2017, 5, 86–93. [Google Scholar]
- AppleMaps. In Apple: Sattelite Pro. Available online: https://satellites.pro/China_map#31.928614,119.487323,19 (accessed on 3 January 2021).
- AppleMaps. In Apple: Sattelite Pro. Available online: https://satellites.pro/China_map#31.878564,119.454724,19 (accessed on 3 January 2021).
- AppleMaps. In Apple: Sattelite Pro. Available online: https://satellites.pro/China_map#31.756452,119.511074,19 (accessed on 3 January 2021).
- AppleMaps. In Apple: Sattelite Pro. Available online: https://satellites.pro/China_map#32.466044,120.242939,19 (accessed on 3 January 2021).
- Wang, L.; Lan, Y.; Zhang, Y.; Zhang, H.; Tahir, M.N.; Ou, S.; Liu, X.; Chen, P. Applications and Prospects of Agricultural Unmanned Aerial Vehicle Obstacle Avoidance Technology in China. Sensors 2019, 19, 642. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Nakhaeinia, D.; Tang, S.H.; Noor, S.M.; Motlagh, O. A review of control architectures for autonomous navigation of mobile robots. Int. J. Phys. Sci. 2011, 6, 169–174. [Google Scholar] [CrossRef]
- Wang, G.; Han, Y.; Li, X.; Andaloro, J.; Chen, P.; Hoffmann, W.C.; Han, X.; Chen, S.; Lan, Y. Field evaluation of spray drift and environmental impact using an agricultural unmanned aerial vehicle (UAV) sprayer. Sci. Total Environ. 2020, 737, 139793. [Google Scholar] [CrossRef] [PubMed]
- Liu, Z.; He, Y.; Wang, C.; Song, R. Analysis of the Influence of Foggy Weather Environment on the Detection Effect of Machine Vision Obstacles. Sensors 2020, 20, 349. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Richard, P.-L.; Pouliot, N.; Montambault, S. Introduction of a LIDAR-Based Obstacle Detection System on the LineScout Power Line Robot. In Proceedings of the 2014 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Besacon, France, 8–11 July 2014; IEEE: Besacon, France, 2014; pp. 1734–1740. [Google Scholar] [CrossRef]
- Zhu, Y.; Yi, B.; Guo, T. A Simple Outdoor Environment Obstacle Detection Method Based on Information Fusion of Depth and Infrared. J. Robot. 2016, 2016, 2379685. [Google Scholar] [CrossRef] [Green Version]
- White, B.A.; Shin, H.-S.; Tsourdos, A. UAV Obstacle Avoidance using Differential Geometry Concepts. IFAC Proc. Vol. 2011, 44, 6325–6330. [Google Scholar] [CrossRef]
- Aswini, N.; Krishna Kumar, E.; Uma, S.V. UAV and obstacle sensing techniques—A perspective. Int. J. Intell. Unmanned Syst. 2018, 6, 32–46. [Google Scholar] [CrossRef]
- Discant, A.; Rogozan, A.; Rusu, C.; Bensrhair, A. Sensors for Obstacle Detection—A Survey. In Proceedings of the 2007 30th International Spring Seminar on Electronics Technology (ISSE), Cluj-Napoca, Romania, 9–13 May 2007; IEEE: Cluj-Napoca, Romania, 2007; pp. 100–105. [Google Scholar] [CrossRef]
- Siegwart, R.; Nourbakhsh, I.R.; Scaramuzza, D. Introduction to Autonomous Mobile Robots; MIT Press: Boston, MA, USA, 2011. [Google Scholar]
- Wen-Hong, Z.; Lamarche, T. Velocity Estimation by Using Position and Acceleration Sensors. IEEE Trans. Ind. Electron. 2007, 54, 2706–2715. [Google Scholar] [CrossRef]
- Dai, R.; Stein, R.B.; Andrews, B.J.; James, K.B.; Wieler, M. Application of tilt sensors in functional electrical stimulation. IEEE Trans. Rehabil. Eng 1996, 4, 63–72. [Google Scholar] [CrossRef] [PubMed]
- Chao, H.; Gu, Y.; Gross, J.; Guo, G.; Fravolini, M.L.; Napolitano, M.R. A Comparative Study of Optical Flow and Traditional Sensors in Uav Navigation. In Proceedings of the 2013 American Control Conference, Washington, DC, USA, 17–19 June 2013; IEEE: Washington, DC, USA, 2013; pp. 3858–3863. [Google Scholar] [CrossRef]
- Racz, R.; Schott, C.; Huber, S. Electronic Compass Sensor; SENSORS; IEEE: Vienna, Austria, 2004; pp. 1446–1449. [Google Scholar] [CrossRef]
- Beliveau, A.; Spencer, G.T.; Thomas, K.A.; Roberson, S.L. Evaluation of MEMS capacitive accelerometers. IEEE Des. Test Comput. 1999, 16, 48–56. [Google Scholar] [CrossRef]
- Foix, S.; Alenya, G.; Torras, C. Lock-in Time-of-Flight (ToF) Cameras: A Survey. IEEE Sens. J. 2011, 11, 1917–1926. [Google Scholar] [CrossRef] [Green Version]
- Yan, W.Y.; Shaker, A.; El-Ashmawy, N. Urban land cover classification using airborne LiDAR data: A review. Remote Sens. Environ. 2015, 158, 295–310. [Google Scholar] [CrossRef]
- Suh, Y.S. Laser Sensors for Displacement, Distance and Position. Sensors 2019, 19, 1924. [Google Scholar] [CrossRef] [Green Version]
- Bernini, N.; Bertozzi, M.; Castangia, L.; Patander, M.; Sabbatelli, M. Real-Time Obstacle Detection Using Stereo Vision for Autonomous Ground Vehicles: A Survey. In Proceedings of the 17th International IEEE Conference on Intelligent Transportation Systems (ITSC), Qingdao, China, 24–26 September 2014; IEEE: Qingdao, China, 2014; pp. 873–878. [Google Scholar] [CrossRef]
- Choi, J.; Ahn, S.; Chung, W.K. Robust Sonar Feature Detection for the SLAM of Mobile Robot. In Proceedings of the 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems, Edmonton, AB, Canada, 2–6 August 2005; IEEE: Edmonton, AB, Canada, 2005; pp. 3415–3420. [Google Scholar] [CrossRef]
- Li, C.; Peng, Z.; Huang, T.-Y.; Fan, T.; Wang, F.-K.; Horng, T.-S.; Munoz-Ferreras, J.-M.; Gomez-Garcia, R.; Ran, L.; Lin, J. A Review on Recent Progress of Portable Short-Range Noncontact Microwave Radar Systems. IEEE Trans. Microw. Theory Tech. 2017, 65, 1692–1706. [Google Scholar] [CrossRef]
- Akagawa, K. Thermal Camera for Infrared Imaging. U.S. Patent 5,994,699, 30 November 1999. [Google Scholar]
- Fossum, E.R.; Hondongwa, D.B. A review of the pinned photodiode for CCD and CMOS image sensors. IEEE J. Electron. Devices Soc. 2014. [Google Scholar] [CrossRef]
- Yamaguchi, K.; Kato, T.; Ninomiya, Y. Moving Obstacle Detection Using Monocular Vision. In Proceedings of the 2006 IEEE Intelligent Vehicles Symposium, Meguro-Ku, Japan, 13–15 June 2006; IEEE: Meguro-Ku, Japan, 2006; pp. 288–293. [Google Scholar] [CrossRef]
- Han, Y.-X.; Zhang, Z.-S.; Dai, M. Monocular vision system for distance measurement based on feature points. Guangxue Jingmi Gongcheng 2011, 19, 1110–1117. [Google Scholar]
- Zhao, H.; Chen, X.C.; Wang, J.L.; Zeng, R.F. Obstacle avoidance algorithm based on monocular vision for quad-rotor helicopter. Opt. Precis. Eng. Freq. (Rf) Time Flight Ranging Wirel. Sens. Netw. 2014, 22, 2232–2241. [Google Scholar] [CrossRef]
- Rui, Z.; Jingyi, L.; Hengyu, L.; Qixing, C. Real-Time Obstacle Detection Based on Monocular Vision for Unmanned Surface Vehicles. In Proceedings of the International Conference on Bio-inspired Information and Communication Technologies, Singapore, 1–2 August 2020; Springer: Singapore, 2020; pp. 166–180. [Google Scholar] [CrossRef]
- Wang, S.-H.; Li, X.-X. A Real-Time Monocular Vision-Based Obstacle Detection. In Proceedings of the 2020 6th International Conference on Control, Automation and Robotics (ICCAR), Singapore, 20–23 April 2020; IEEE: Singapore, 2020; pp. 695–699. [Google Scholar] [CrossRef]
- Cho, M.-g. In A Study on the Obstacle Recognition for Autonomous Driving RC Car Using Lidar and Thermal Infrared Camera. In Proceedings of the 2019 Eleventh International Conference on Ubiquitous and Future Networks (ICUFN), Zagreb, Croatia, 2–5 June 2019; IEEE: Zagreb, Croatia, 2019; pp. 544–546. [Google Scholar] [CrossRef]
- Carrio, A.; Lin, Y.; Saripalli, S.; Campoy, P. Obstacle Detection System for Small UAVs using ADS-B and Thermal Imaging. J. Intell. Robot. Syst. 2017, 88, 583–595. [Google Scholar] [CrossRef]
- Huang, S.-K.; Xia, T.; Zhang, T.-X. Passive ranging method based on infrared images. Infrared Laser Eng. 2007, 36, 109. [Google Scholar]
- Lu, Y.; Feng, Y.-S.; Ling, Y.-S.; Qiao, Y. Infrared three-color passive ranging by colorimetric method. Guangxue Jingmi Gongcheng 2012, 20, 2680–2685. [Google Scholar] [CrossRef]
- Wang, H.; Wang, J.; Shen, Z. Helicopter Pods-based Obstacle Avoidance Technology Using Infrared Imaging and Radar. Sci. Technol. Innov. Her 2014, 29, 56–59. [Google Scholar]
- Cheng, H.; Li, J.; Jin, B. Research of Small Blind Zone Ultrasonic Ranging Method Based on Natural Vibration Restraining. J. Vib. Meas. Diagn 2015, 2, 369–374. [Google Scholar]
- Wang, M. Localization and Obstacle Avoidance Control of Agricultural Robot Based on DSP and Ultrasonic Distance Measurement. Agric. Mech. Res 2017, 8, 207–211. [Google Scholar]
- Zhao, H.; Liu, Y.; Zhu, X.; Zhao, Y.; Zha, H. Scene Understanding in a Large Dynamic Environment through a Laser-Based Sensing. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 4–8 May 2010; IEEE: Anchorage, AK, USA, 2010; pp. 127–133. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, J.; Zeng, Q. 3D environment restructure method with structured light for indoor vision/inertial navigation. J. Chin. Inert. Technol. 2016, 1, 51–58. [Google Scholar]
- Houshiar, H.; Elseberg, J.; Borrmann, D.; Nüchter, A. A study of projections for key point based registration of panoramic terrestrial 3D laser scan. GEO Spat. Inf. Sci. 2015, 18, 11–31. [Google Scholar] [CrossRef]
- Thorbjornsen, B.; White, N.; Brown, A.; Reeve, J. Radio frequency (RF) time-of-flight ranging for wireless sensor networks. Meas. Sci. Technol. Meas. Via Using Ultrason. Sens. 2010, 21, 035202. [Google Scholar] [CrossRef] [Green Version]
- Rankin, G.; Tirkel, A.; Leukhin, A. Millimeter Wave Array for UAV Imaging MIMO Radar. In Proceedings of the 2015 16th International Radar Symposium (IRS), Dresden, Germany, 24–26 June 2015; IEEE: Dresden, Germany, 2015; pp. 499–504. [Google Scholar] [CrossRef]
- Zhang, W.; Ning, Y.; Suo, C. A Method Based on Multi-Sensor Data Fusion for UAV Safety Distance Diagnosis. Electronics 2019, 12, 1467. [Google Scholar] [CrossRef] [Green Version]
- Lyu, H. Detect and Avoid System Based on Multi Sensor Fusion for UAV. In Proceedings of the 2018 International Conference on Information and Communication Technology Convergence (ICTC), Jeju, Korea, 17–19 October 2018; IEEE: Jeju, Korea, 2018; pp. 1107–1109. [Google Scholar] [CrossRef]
- Hrabar, S.; Sukhatme, G.S.; Corke, P.; Usher, K.; Roberts, J. Combined Optic-Flow and Stereo-Based Navigation of Urban Canyons for a UAV. In Proceedings of the 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems, Edmonton, AB, Canada, 2–6 August 2005; IEEE: Edmonton, AB, Canada, 2005; pp. 3309–3316. [Google Scholar] [CrossRef] [Green Version]
- McGuire, K.; De Croon, G.; De Wagter, C.; Tuyls, K.; Kappen, H. Efficient Optical Flow and Stereo Vision for Velocity Estimation and Obstacle Avoidance on an Autonomous Pocket Drone. IEEE Robot. Autom. Lett. 2017, 2, 1070–1076. [Google Scholar] [CrossRef] [Green Version]
- Santos, M.C.; Santana, L.V.; Brandao, A.S.; Sarcinelli-Filho, M. UAV Obstacle Avoidance Using RGB-D System. In Proceedings of the 2015 International Conference On Unmanned Aircraft Systems (ICUAS), Denver, CO, USA, 9–12 June 2015; IEEE: Denver, CO, USA, 2015; pp. 312–319. [Google Scholar] [CrossRef]
- Gageik, N.; Benz, P.; Montenegro, S. Obstacle Detection and Collision Avoidance for a UAV With Complementary Low-Cost Sensors. IEEE Access 2015, 3, 599–609. [Google Scholar] [CrossRef]
- Kragh, M.F.; Christiansen, P.; Laursen, M.S.; Larsen, M.; Steen, K.A.; Green, O.; Karstoft, H.; Jorgensen, R.N. FieldSAFE: Dataset for Obstacle Detection in Agriculture. Sensors 2017, 17, 2579. [Google Scholar] [CrossRef] [Green Version]
- Gageik, N.; Muller, T.; Montenergo, S. Obstacle detection and collision avoidance using ultrasonic distance sensors for an autonomous quadrocopter. In Proceedings of the 1st microdrones International ResearchWorkshop UAVWeek 2012, Siegen, Germany, 20–21 November 2012; pp. 3–23. [Google Scholar]
- Zhmud, V.; Kondratiev, N.; Kuznetsov, K.; Trubin, V.; Dimitrov, L. Application of Ultrasonic Sensor for Measuring Distances in Robotics; Conference Series; IOP Publishing: Tomsk, Russia, 2018; p. 032189. [Google Scholar] [CrossRef] [Green Version]
- Kelemen, M.; Virgala, I.; Kelemenová, T.; Mikova, L.; Frankovský, P.; Lipták, T.; Lörinc, M. Distance measurement via using of ultrasonic sensor. J. Autom. Control 2015, 3, 71–74. [Google Scholar]
- Kilian, J.; Haala, N.; Englich, M. Capture and evaluation of airborne laser scanner data. Int. Arch. Photogramm. Remote Sens. 1996, 31, 383–388. [Google Scholar]
- Donges, A.; Noll, R. Laser Measurement Technology; Springer: Berlin/Heidelberg, Germany, 2016. [Google Scholar]
- Di, L.; Chao, H.; Chen, Y. A Two-Stage Calibration Method for Low-Cost UAV Attitude Estimation Using Infrared Sensor. In Proceedings of the 2010 IEEE/ASME International Conference on Mechatronic and Embedded Systems and Applications, QingDao, China, 15–17 July 2010; IEEE: QingDao, China, 2010; pp. 137–142. [Google Scholar] [CrossRef]
- Silberman, N.; Fergus, R. Indoor Scene Segmentation Using a Structured LIGHT Sensor. In Proceedings of the 2011 IEEE International Conference on Computer Vision Workshops (ICCV Workshops), Barcelona, Spain, 6–13 November 2011; IEEE: Barcelona, Spain, 2011; pp. 601–608. [Google Scholar] [CrossRef]
- Nejad, S.M.; Olyaee, S. Low-noise high-accuracy TOF laser range finder. Am. J. Appl. Sci. 2008, 5, 755–762. [Google Scholar] [CrossRef] [Green Version]
- Fujimoto, D.; Hayashi, Y.-I. Study on Estimation of Sensing Timing Based on Observation of EM Radiation from ToF Range Finder. In Proceedings of the 2019 Joint International Symposium on Electromagnetic Compatibility, Sapporo and Asia-Pacific International Symposium on Electromagnetic Compatibility (EMC Sapporo/APEMC), Sapporo, Japan, 3–7 June 2019; IEEE: Sapporo, Japan, 2019; pp. 1–4. [Google Scholar] [CrossRef]
- Xiang, J.; Zhang, M. Millimeter-Wave Radar and Its Applications; National Defense Industry Press: Beijing, China, 2015. [Google Scholar]
- Johnston, S.L. Millimeter Wave Radar; Harard: Dedham, MA, USA, 1980. [Google Scholar]
- Chen, H.-C. Monocular Vision-Based Obstacle Detection and Avoidance for a Multicopter. IEEE Access 2019, 7, 167869–167883. [Google Scholar] [CrossRef]
- Levkovits-Scherer, D.S.; Cruz-Vega, I.; Martinez-Carranza, J. Real-Time Monocular Vision-Based UAV Obstacle Detection and Collision Avoidance in GPS-Denied Outdoor Environments Using CNN MobileNet-SSD. In Proceedings of the Mexican International Conference on Artificial Intelligence, Veracruz, Mexico, 27 October–2 November 2019; Springer: Berlin/Heidelberg, Germany, 2019; pp. 613–621. [Google Scholar] [CrossRef]
- Zhang, L.; Xu, J.; Xia, Q. Pose estimation algorithm and verification based on binocular stereo vision for unmanned aerial vehicle. J. Harbin Inst. Technolobstacle Detect. Using Ultrason. Sens. 2014, 46, 66–72. [Google Scholar]
- Zhu, P.; Zhen, Z.-Y.; Qin, H.-Q.; Jiang, J. Stereo vision and optical flow based obstacle avoidance algorithm for UAVs. Electron. Opt. Control 2017, 24, 31–35. [Google Scholar]
- Wang, Q.; Meng, Z.; Liu, H. Review on Application of Binocular Vision Technology in Field Obstacle Detection. In IOP Conference Series: Materials Science and Engineering, Proceedings of the International Conference on AI and Big Data Application (AIBDA 2019), Guangzhou, China, 20–22 December 2019; IOP Publishing: Bristol, UK, 2020; p. 012025. [Google Scholar] [CrossRef]
- Lei, Z.; Shumao, W.; Bingqi, C.; Zhigang, L. Detection of obstacles in farmland based on binocular vision. J. China Agric. Univ. 2007, 12, 70. [Google Scholar]
- Mori, T.; Scherer, S. First Results in Detecting and Avoiding Frontal Obstacles from a Monocular Camera for Micro Unmanned Aerial Vehicles. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; IEEE: Karlsruhe, Germany, 2013; pp. 1750–1757. [Google Scholar] [CrossRef] [Green Version]
- Lee, J.O.; Lee, K.H.; Park, S.H.; Im, S.G.; Park, J. Obstacle avoidance for small UAVs using monocular vision. Aircr. Eng. Aerosp. Technol. 2011, 83, 397–406. [Google Scholar] [CrossRef] [Green Version]
- Magree, D.; Mooney, J.G.; Johnson, E.N. Monocular visual mapping for obstacle avoidance on UAVs. In Proceedings of the 2013 International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, GA, USA, 18–31 May 2013; IEEE: Atlanta, GA, USA, 2013; pp. 471–479. [Google Scholar] [CrossRef]
- Pal, S.K.; King, R.A.; Hashim, A.A. Image description and primitive extraction using fuzzy sets. IEEE Trans. Syst. ManCybern. 1983, SMC-13, 94–100. [Google Scholar] [CrossRef]
- Aoude, G.S.; Luders, B.D.; Levine, D.S.; How, J.P. Threat-Aware Path Planning in Uncertain Urban Environments. In Proceedings of the2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010; IEEE: Taipei, Taiwan, 2010; pp. 6058–6063. [Google Scholar] [CrossRef]
- Barry, A.J.; Florence, P.R.; Tedrake, R. High-speed autonomous obstacle avoidance with pushbroom stereo. J. Field Robot. 2018, 35, 52–68. [Google Scholar] [CrossRef] [Green Version]
- Souhila, K.; Karim, A. Optical Flow Based Robot Obstacle Avoidance. Int. J. Adv. Robot. Syst. 2007, 4, 2. [Google Scholar] [CrossRef] [Green Version]
- Moore, R.J.; Thurrowgood, S.; Bland, D.; Soccol, D.; Srinivasan, M.V. A Stereo Vision System for Uav Guidance. In Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, MO, USA, 11–15 October 2009; IEEE: St. Louis, MO, USA, 2009; pp. 3386–3391. [Google Scholar] [CrossRef]
- Gao, Y.; Ai, X.; Wang, Y.; Rarity, J.; Dahnoun, N. UV-Disparity Based Obstacle Detection with 3D Camera and Steerable Filter. In Proceedings of the 2011 IEEE Intelligent Vehicles Symposium (IV), Baden-Baden, Germany, 5–9 June 2011; IEEE: Baden-Baden, Germany, 2011; pp. 957–962. [Google Scholar] [CrossRef]
- Kramm, S.; Bensrhair, A. Obstacle Detection Using Sparse Stereovision and Clustering Techniques. In Proceedings of the 2012 IEEE Intelligent Vehicles Symposium, Madrid, Spain, 3–7 June 2012; IEEE: Madrid, Spain, 2012; pp. 760–765. [Google Scholar] [CrossRef]
- Iacono, M.; Sgorbissa, A. Path following and obstacle avoidance for an autonomous UAV using a depth camera. Robot. Auton. Syst. 2018, 106, 38–46. [Google Scholar] [CrossRef]
- Kato, T.; Ninomiya, Y.; Masaki, I. An obstacle detection method by fusion of radar and motion stereo. IEEE Trans. Intell. Transp. Syst. 2002, 3, 182–188. [Google Scholar] [CrossRef]
- Vidhya, D.; Rebelo, D.P.; D’Silva, C.; Fernandes, L.W.; Costa, C. Obstacle detection using ultrasonic sensors. Int. J. Innov. Res. Sci. Technol. 2016, 2, 316–320. [Google Scholar]
- Viquerat, A.; Blackhall, L.; Reid, A.; Sukkarieh, S.; Brooker, G. Reactive Collision Avoidance for Unmanned Aerial Vehicles Using Doppler Radar. In Field and Service Robotics; Springer: Berlin/Heidelberg, Germany, 2008; pp. 245–254. [Google Scholar] [CrossRef] [Green Version]
- Blanc, C.; Aufrère, R.; Malaterre, L.; Gallice, J.; Alizon, J. Obstacle detection and tracking by millimeter wave RADAR. IFAC Proc. Vol. 2004, 37, 322–327. [Google Scholar] [CrossRef]
- Sugimoto, S.; Tateda, H.; Takahashi, H.; Okutomi, M. Obstacle Detection Using Millimeter-Wave Radar and Its Visualization on Image Sequence. In Proceedings of the 17th International Conference on Pattern Recognition, ICPR 2004, Cambridge, UK, 26 August 2004; IEEE: Cambridge, UK, 2004; pp. 342–345. [Google Scholar] [CrossRef]
- Han, J.; Kim, D.; Lee, M.; Sunwoo, M. Enhanced road boundary and obstacle detection using a downward-looking LIDAR sensor. IEEE Trans. Veh. Technol. 2012, 61, 971–985. [Google Scholar] [CrossRef]
- Catapang, A.N.; Ramos, M. Obstacle Detection Using a 2D LIDAR System for an Autonomous Vehicle. In Proceedings of the 2016 6th IEEE International Conference on Control System, Computing and Engineering (ICCSCE), Batu, Ferringhi, 2 August 2016; IEEE: Batu, Ferringhi, 2016; pp. 441–445. [Google Scholar] [CrossRef]
- Kuthirummal, S.; Das, A.; Samarasekera, S. A Graph Traversal Based Algorithm for Obstacle Detection Using Lidar or Stereo. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; IEEE: San Francisco, CA, USA, 2011; pp. 3874–3880. [Google Scholar] [CrossRef]
- Thi Phuoc Van, N.; Tang, L.; Demir, V.; Hasan, S.F.; Duc Minh, N.; Mukhopadhyay, S. Review-Microwave Radar Sensing Systems for Search and Rescue Purposes. Sensors 2019, 19, 2879. [Google Scholar] [CrossRef] [Green Version]
- Zeng, S.; Zhang, W.; Litkouhi, B.B. Fusion of Obstacle Detection Using Radar and Camera. U.S. Patent 9,429,650, 30 August 2016. [Google Scholar]
- Jha, H.; Lodhi, V.; Chakravarty, D. Object Detection and Identification Using Vision and Radar Data Fusion System for Ground-Based Navigation. In Proceedings of the 2019 6th International Conference on Signal Processing and Integrated Networks (SPIN), Noida, India, 7–8 March 2019; IEEE: Noida, India, 2019; pp. 590–593. [Google Scholar] [CrossRef]
- Bertozzi, M.; Bombini, L.; Cerri, P.; Medici, P.; Antonello, P.C.; Miglietta, M. Obstacle Detection and Classification Fusing Radar and Vision. In Proceedings of the 2008 IEEE Intelligent Vehicles Symposium, Eindhoven, The Netherlands, 4–6 June 2008; IEEE: Eindhoven, The Netherlands, 2008; pp. 608–613. [Google Scholar] [CrossRef]
- Hill, M.N. Physical Oceanography; Harvard University Press: Boston, MA, USA, 2005; Volume 1. [Google Scholar]
- D’amico, A.; Pittenger, R. A Brief History of Active Sonar; Space and Naval Warfare Systems Center: San Diego, CA, USA, 2009. [Google Scholar]
- Elfes, A. Sonar-based real-world mapping and navigation. IEEE J. Robot. Autom. 1987, 3, 249–265. [Google Scholar] [CrossRef]
- Flynn, A.M. Combining Sonar and Infrared Sensors for Mobile Robot Navigation. Int. J. Robot. Res. 2016, 7, 5–14. [Google Scholar] [CrossRef]
- Kleeman, L.; Kuc, R. An Optimal Sonar Array for Target Localization and Classification. In Proceedings of the 1994 IEEE International Conference on Robotics and Automation, San Diego, CA, USA, 8–13 May 1994; IEEE: San Diego, CA, USA, 1994; pp. 3130–3135. [Google Scholar] [CrossRef]
- Akbarally, H.; Kleeman, L. A Sonar Sensor for Accurate 3D Target Localisation and Classification. In Proceedings of the 1995 IEEE International Conference on Robotics and Automation, Nagoya, Japan, 21–27 May 1995; IEEE: Nagoya, Japan, 1995; pp. 3003–3008. [Google Scholar] [CrossRef]
- Ribas, D.; Ridao, P.; Neira, J.; Tardos, J.D. SLAM Using an Imaging Sonar for Partially Structured Underwater Environments. In Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, Beijing, China, 9–15 October 2006; IEEE: Beijing, China, 2006; pp. 5040–5045. [Google Scholar] [CrossRef] [Green Version]
- Steckel, J.; Peremans, H. BatSLAM: Simultaneous localization and mapping using biomimetic sonar. PLoS ONE 2013, 8, e54076. [Google Scholar] [CrossRef] [PubMed]
- Steckel, J.; Peremans, H. Spatial Sampling Strategy for a 3D Sonar Sensor Supporting BatSLAM. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–3 October 2015; IEEE: Hamburg, Germany, 2015; pp. 723–728. [Google Scholar] [CrossRef]
- Kerstens, R.; Laurijssen, D.; Steckel, J. ERTIS: A Fully Embedded Real Time 3D Imaging Sonar Sensor for Robotic Applications. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; IEEE: Montreal, QC, Canada, 2019; pp. 1438–1443. [Google Scholar] [CrossRef]
- Bin Misnan, M.F.; Arshad, N.M.; Abd Razak, N. Construction Sonar Sensor Model of Low Altitude Field Mapping Sensors for Application on a UAV. In Proceedings of the 2012 IEEE 8th International Colloquium on Signal Processing and its Applications, Malacca, Malaysia, 23–25 March 2012; IEEE: Malacca, Malaysia, 2012; pp. 446–450. [Google Scholar] [CrossRef]
- Gupta, N.; Makkar, J.S.; Pandey, P. Obstacle Detection and Collision Avoidance Using Ultrasonic Sensors for Rc Multirotors. In Proceedings of the 2015 International Conference on Signal Processing and Communication (ICSC), Noida, India, 16–18 March 2015; IEEE: Noida, India, 2015; pp. 419–423. [Google Scholar] [CrossRef]
- Becker, M.; Sampaio, R.C.B.; Bouabdallah, S.; Perrot, V.; Siegwart, R. In flight collision avoidance for a Mini-UAV robot based on onboard sensors. J. Braz. Soc. Mech. Sci. Eng. 2012, 2. Available online: https://www.researchgate.net/profile/Rafael-Sampaio-8/publication/261635073_In_flight_collision_avoidance_for_a_Mini-UAV_robot_based_on_onboard_sensors/links/00b7d534e01ac6c752000000/In-flight-collision-avoidance-for-a-Mini-UAV-robot-based-on-onboard-sensors.pdf (accessed on 1 April 2021).
- Li, J.; Kaess, M.; Eustice, R.M.; Johnson-Roberson, M. Pose-Graph SLAM Using Forward-Looking Sonar. IEEE Robot. Autom. Lett. 2018, 3, 2330–2337. [Google Scholar] [CrossRef]
- Rahman, S.; Li, A.Q.; Rekleitis, I. Sonar Visual Inertial SLAM of Underwater Structures. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, QLD, Austrilia, 21–25 May 2018; IEEE: Brisbane, QLD, Austrilia, 2018; pp. 5190–5196. [Google Scholar] [CrossRef]
- Teixeira, P.V.; Kaess, M.; Hover, F.S.; Leonard, J.J. Underwater Inspection Using Sonar-Based Volumetric Submaps. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea, 9–14 October 2016; IEEE: Daejeon, Korea, 2016; pp. 4288–4295. [Google Scholar] [CrossRef] [Green Version]
- Huang, T.A.; Kaess, M. Towards Acoustic Structure from Motion for Imaging Sonar. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–3 October 2015; IEEE: Hamburg, Germany, 2015; pp. 758–765. [Google Scholar] [CrossRef]
- Wang, X.; Zhang, G.; Sun, Y.; Wan, L.; Cao, J. Research on autonomous underwater vehicle wall following based on reinforcement learning and multi-sonar weighted round robin mode. Int. J. Adv. Robot. Syst. 2020, 17, 1729881420925311. [Google Scholar] [CrossRef]
- Chutia, S.; Kakoty, N.M.; Deka, D. A review of underwater robotics, navigation, sensing techniques and applications. Proc. Adv. Robot. 2017, 1–6. [Google Scholar] [CrossRef]
- Sahoo, A.; Dwivedy, S.K.; Robi, P.S. Advancements in the field of autonomous underwater vehicle. Ocean Eng. 2019, 181, 145–160. [Google Scholar] [CrossRef]
- Christ, R.D.; Wernli, R.L., Sr. The ROV Manual: A User Guide for Remotely Operated Vehicles; Butterworth-Heinemann: Oxford, UK, 2013. [Google Scholar]
- Nguyen, H.T.; Lee, E.H.; Lee, S. Study on the Classification Performance of Underwater Sonar Image Classification Based on Convolutional Neural Networks for Detecting a Submerged Human Body. Sensors 2019, 20, 94. [Google Scholar] [CrossRef] [Green Version]
- Levanon, N. Radar Principles. John Wiley & Sons: New York, NY, USA, 1988. [Google Scholar]
- Özer, I.E.; Leijen, F.J.; Jonkman, S.N.; Hanssen, R.F. Applicability of satellite radar imaging to monitor the conditions of levees. J. Flood Risk Manag. 2018, 12 (Suppl. S2), e12509. [Google Scholar] [CrossRef] [Green Version]
- Lee, J.-S.; Pottier, E. Polarimetric Radar Imaging: From Basics to Applications; CRC Press: Boca Raton, FL, USA, 2017. [Google Scholar]
- Kanevsky, M.B. Radar Imaging of the Ocean Waves; Elsevier: Amsterdam, The Netherlands, 2008. [Google Scholar]
- Brisken, S.; Moscadelli, M.; Seidel, V.; Schwark, C. Passive Radar Imaging Using DVB-S2. In Proceedings of the 2017 IEEE Radar Conference (RadarConf), Seattle, WA, USA, 8–12 May 2017; IEEE: Seattle, WA, USA, 2017; pp. 0552–0556. [Google Scholar] [CrossRef]
- Ergun, S.; Sonmez, S. Terahertz technology for military applications. J. Manag. Inf. Sci. 2015, 3, 13–16. [Google Scholar] [CrossRef]
- Pisciottano, I.; Pastina, D.; Cristallini, D. DVB-S based passive radar imaging of ship targets. In Proceedings of the 2019 20th International Radar Symposium (IRS), Ulm, Germany, 26–28 June 2019; IEEE: Ulm, Germany, 2019; pp. 1–7. [Google Scholar] [CrossRef]
- Cristallini, D.; Pisciottano, I.; Kuschel, H. Multi-Band Passive Radar Imaging Using Satellite Illumination. In Proceedings of the 2018 International Conference on Radar (RADAR), Brisbane, QLD, Austrilia, 27–30 August 2018; IEEE: Brisbane, QLD, Austrilia, 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Giubbolini, L. A multistatic microwave radar sensor for short range anticollision warning. IEEE Trans. Veh. Technol. 2000, 49, 2270–2275. [Google Scholar] [CrossRef]
- Baraniuk, R.; Steeghs, P. In Compressive Radar Imaging. In Proceedings of the 2007 IEEE radar conference, Waltham, MA, USA, 17–20 April 2007; IEEE: Waltham, MA, USA, 2007; pp. 128–133. [Google Scholar] [CrossRef]
- Vivet, D.; Checchin, P.; Chapuis, R. Localization and mapping using only a rotating FMCW radar sensor. Sensors 2013, 13, 4527–4552. [Google Scholar] [CrossRef] [PubMed]
- Zhu, Y.; Zhu, Y.; Zhao, B.Y.; Zheng, H. Reusing 60ghz Radios for Mobile Radar Imaging. In Proceedings of the 21st Annual International Conference on Mobile Computing and Networking, Paris, France, 7–11 September 2015; pp. 103–116. [Google Scholar] [CrossRef] [Green Version]
- Iyer, N.C.; Pillai, P.; Bhagyashree, K.; Mane, V.; Shet, R.M.; Nissimagoudar, P.; Krishna, G.; Nakul, V. Millimeter-wave AWR1642 RADAR for Obstacle Detection: Autonomous Vehicles. In Innovations in Electronics and Communication Engineering; Springer: Berlin/Heidelberg, Germany, 2020; pp. 87–94. [Google Scholar] [CrossRef]
- Guo, L.; Antoniou, M.; Baker, C.J. Memory-augmented cognitive radar for obstacle avoidance using nearest steering vector search. IET Radar. Sonar. Navig. 2020, 15, 51–61. [Google Scholar] [CrossRef]
- Feger, R.; Wagner, C.; Schuster, S.; Scheiblhofer, S.; Jager, H.; Stelzer, A. A 77-GHz FMCW MIMO Radar Based on an SiGe Single-Chip Transceiver. IEEE Trans. Microw. Theory Tech. 2009, 57, 1020–1035. [Google Scholar] [CrossRef]
- Zhang, Z.; Tian, Z.; Zhou, M. Latern: Dynamic Continuous Hand Gesture Recognition Using FMCW Radar Sensor. IEEE Sens. J. 2018, 18, 3278–3289. [Google Scholar] [CrossRef]
- Peng, Z.; Li, C.; Muñoz-Ferreras, J.-M.; Gómez-García, R. An FMCW Radar Sensor for Human Gesture Recognition in the Presence of Multiple Targets. In Proceedings of the 2017 First IEEE MTT-S International Microwave Bio Conference (IMBIOC), Gothenburg, Sweden, 15–17 May 2017; IEEE: Gothenburg, Sweden, 2017; pp. 1–3. [Google Scholar] [CrossRef]
- Folster, F.; Rohling, H.; Lubbert, U. An Automotive Radar Network Based on 77 GHz FMCW Sensors. In Proceedings of the IEEE International Radar Conference, Arlington, VA, USA, 9–12 May 2005; IEEE: Arlington, VA, USA, 2005; pp. 871–876. [Google Scholar] [CrossRef]
- Jardak, S.; Alouini, M.-S.; Kiuru, T.; Metso, M.; Ahmed, S. Compact mmWave FMCW radar: Implementation and performance analysis. IEEE Aerosp. Electron. Syst. Mag. 2019, 34, 36–44. [Google Scholar] [CrossRef]
- Hussain, R.; Zeadally, S. Autonomous Cars: Research Results, Issues, and Future Challenges. IEEE Commun. Surv. Tutor. 2019, 21, 1275–1313. [Google Scholar] [CrossRef]
- Jianmin, D.; Kaihua, Z.; Lixiao, S. Road and Obstacle Detection Based on Multi-Layer Laser Radar in Driverless Car. In Proceedings of the 2015 34th Chinese Control Conference (CCC), Hangzhou, China, 28–30 July 2015; IEEE: Hangzhou, China, 2015; pp. 8003–8008. [Google Scholar] [CrossRef] [Green Version]
- Kwag, Y.K.; Chung, C.H. UAV Based Collision Avoidance Radar Sensor. In Proceedings of the 2007 IEEE International Geoscience and Remote Sensing Symposium, Barcelona, Spain, 23–27 July 2007; IEEE: Barcelona, Spain, 2007; pp. 639–642. [Google Scholar] [CrossRef]
- Hugler, P.; Roos, F.; Schartel, M.; Geiger, M.; Waldschmidt, C. Radar Taking Off: New Capabilities for UAVs. IEEE Microw. Mag. 2018, 19, 43–53. [Google Scholar] [CrossRef] [Green Version]
- Dogru, S.; Marques, L. Pursuing Drones With Drones Using Millimeter Wave Radar. IEEE Robot. Autom. Lett. 2020, 5, 4156–4163. [Google Scholar] [CrossRef]
- Reutebuch, S.E.; Andersen, H.-E.; McGaughey, R.J. Light detection and ranging (LIDAR): An emerging tool for multiple resource inventory. J. For. 2005, 103, 286–292. [Google Scholar] [CrossRef]
- Kikuta, H.; Iwata, K.; Nagata, R. Distance measurement by the wavelength shift of laser diode light. Appl. Opt. 1986, 25, 2976. [Google Scholar] [CrossRef] [PubMed]
- Dalgleish, F.R.; Vuorenkoski, A.K.; Ouyang, B. Extended-Range Undersea Laser Imaging: Current Research Status and a Glimpse at Future Technologies. Mar. Technol. Soc. J. 2013, 47, 128–147. [Google Scholar] [CrossRef]
- Ye, C.; Borenstein, J. Characterization of a 2D Laser Scanner for Mobile Robot Obstacle Negotiation. In Proceedings of the 2002 IEEE International Conference on Robotics and Automation (Cat. No. 02CH37292), Washington, DC, USA, 11–15 May 2002; IEEE: Washington, DC, USA, 2002; pp. 2512–2518. [Google Scholar] [CrossRef] [Green Version]
- Yu, C.; Zhang, D. Obstacle Detection Based on a Four-Layer Laser Radar. In Proceedings of the 2007 IEEE International Conference on Robotics and Biomimetics (ROBIO), Sanya, China, 15–18 December 2007; IEEE: Sanya, China, 2007; pp. 218–221. [Google Scholar] [CrossRef]
- Himmelsbach, M.; Mueller, A.; Lüttel, T.; Wünsche, H.-J. LIDAR-Based 3D Object Perception. In Proceedings of the 1st International Workshop on Cognition for Technical Systems, Munich, Germany, 6–8 October 2008. [Google Scholar]
- Douillard, B.; Underwood, J.; Kuntz, N.; Vlaskine, V.; Quadros, A.; Morton, P.; Frenkel, A. On the Segmentation of 3D LIDAR Point Clouds. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; IEEE: Shanghai, China, 2011; pp. 2798–2805. [Google Scholar] [CrossRef]
- Demantké, J.; Mallet, C.; David, N.; Vallet, B. Dimensionality Based Scale Selection in 3D Lidar Point Clouds. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, 38, 97–102. [Google Scholar] [CrossRef] [Green Version]
- Li, B.; Zhang, T.; Xia, T. Vehicle detection from 3d lidar using fully convolutional network. arXiv 2016, arXiv:07608. [Google Scholar]
- Kim, J.; Song, S.; Kim, S.; Suk, J. Collision Avoidance System for Agricultural Unmanned Helicopter using LIDAR Sensor. Asia-Pacific Int. Symp. Aerosp. Technol. 2014. Available online: https://www.researchgate.net/profile/Seungkeun-Kim/publication/273135419_Collision_Avoidance_System_for_Agricultural_Unmanned_Helicopter_using_LIDAR_Sensor/links/54f91ec90cf210398e976276/Collision-Avoidance-System-for-Agricultural-Unmanned-Helicopter-using-LIDAR-Sensor.pdf (accessed on 1 April 2021).
- Peng, Y.; Qu, D.; Zhong, Y.; Xie, S.; Luo, J.; Gu, J. The Obstacle Detection and Obstacle Avoidance Algorithm Based on 2-d Lidar. In Proceedings of the 2015 IEEE International Conference on Information and Automation, Lijiang, China, 8–10 August 2015; IEEE: Lijiang, China, 2015; pp. 1648–1653. [Google Scholar] [CrossRef]
- Zheng, L.; Zhang, P.; Tan, J.; Li, F. The Obstacle Detection Method of UAV Based on 2D Lidar. IEEE Access 2019, 7, 163437–163448. [Google Scholar] [CrossRef]
- Song, K.-T.; Chiu, Y.-H.; Kang, L.-R.; Song, S.-H.; Yang, C.-A.; Lu, P.-C.; Ou, S.-Q. Navigation Control Design of a Mobile Robot by Integrating Obstacle Avoidance and LiDAR SLAM. In Proceedings of the 2018 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Miyazaki, Japan, 7–10 October 2018; IEEE: Miyazaki, Japan, 2018; pp. 1833–1838. [Google Scholar] [CrossRef]
- Baras, N.; Nantzios, G.; Ziouzios, D.; Dasygenis, M. Autonomous Obstacle Avoidance Vehicle Using Lidar and an Embedded System. In Proceedings of the 2019 8th International Conference on Modern Circuits and Systems Technologies (MOCAST), Thessaloniki, Greece, 13–15 May 2019; IEEE: Thessaloniki, Greece, 2019; pp. 1–4. [Google Scholar] [CrossRef]
- Miyakawa, A.S. Autonomous Ground Vehicle Low-Profile Obstacle Avoidance Using 2D LIDAR; Naval Postgraduate School: Monterey, CA, USA, 2019. [Google Scholar]
- Gallay, M.; Eck, C.; Zgraggen, C.; Kaňuk, J.; Dvorný, E. High resolution airborne laser scanning and hyperspectral imaging with a small UAV platform. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 41, 823. [Google Scholar] [CrossRef] [Green Version]
- Omasa, K.; Hosoi, F.; Konishi, A. 3D lidar imaging for detecting and understanding plant responses and canopy structure. J. Exp. Bot. 2007, 58, 881–898. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lovell, J.L.; Jupp, D.L.B.; Culvenor, D.S.; Coops, N.C. Using airborne and ground-based ranging lidar to measure canopy structure in Australian forests. Can. J. Remote Sens. 2014, 29, 607–622. [Google Scholar] [CrossRef]
- Omasa, K.; Hosoi, F.; Uenishi, T.M.; Shimizu, Y.; Akiyama, Y. Three-Dimensional Modeling of an Urban Park and Trees by Combined Airborne and Portable On-Ground Scanning LIDAR Remote Sensing. Environ. Model. Assess 2007, 13, 473–481. [Google Scholar] [CrossRef]
- Hopkinson, C.; Lovell, J.; Chasmer, L.; Jupp, D.; Kljun, N.; van Gorsel, E. Integrating terrestrial and airborne lidar to calibrate a 3D canopy model of effective leaf area index. Remote Sens. Environ. 2013, 136, 301–314. [Google Scholar] [CrossRef]
- Fraga-Lamas, P.; Ramos, L.; Mondéjar-Guerra, V.; Fernández-Caramés, T.M. A Review on IoT Deep Learning UAV Systems for Autonomous Obstacle Detection and Collision Avoidance. Remote Sens. 2019, 11, 2144. [Google Scholar] [CrossRef] [Green Version]
- Sun, Z.; Bebis, G.; Miller, R. On-Road Vehicle Detection Using Optical Sensors: A Review. In Proceedings of the 7th International IEEE Conference on Intelligent Transportation Systems (IEEE Cat. No. 04TH8749), Washington, WA, USA, 3–6 October 2004; IEEE: Washington, WA, USA, 2004; pp. 585–590. [Google Scholar] [CrossRef]
- Chavan, Y.; Chavan, P.; Nyayanit, A.; Waydande, V. Obstacle detection and avoidance for automated vehicle: A review. J. Opt. 2021, 50, 46–54. [Google Scholar] [CrossRef]
- Islam, M.M.; Sheikh Sadi, M.; Zamli, K.Z.; Ahmed, M.M. Developing Walking Assistants for Visually Impaired People: A Review. IEEE Sens. J. 2019, 19, 2814–2828. [Google Scholar] [CrossRef]
- Zhao, X.; Pu, F.; Wang, Z.; Chen, H.; Xu, Z. Detection, Tracking, and Geolocation of Moving Vehicle From UAV Using Monocular Camera. IEEE Access 2019, 7, 101160–101170. [Google Scholar] [CrossRef]
- Zaarane, A.; Slimani, I.; Al Okaishi, W.; Atouf, I.; Hamdoun, A. Distance measurement system for autonomous vehicles using stereo camera. Array 2020, 5, 100016. [Google Scholar] [CrossRef]
- Griffiths, E.; Assana, S.; Whitehouse, K. Privacy-preserving Image Processing with Binocular Thermal Cameras. Proc. ACM Interact. Mob. Wearable Ubiquitous Technol. 2018, 1, 1–25. [Google Scholar] [CrossRef]
- Chrysochoos, A.; Louche, H. An infrared image processing to analyse the calorific effects accompanying strain localisation. Int. J. Eng. Sci. 2000, 38, 1759–1788. [Google Scholar] [CrossRef]
- Fuentes-Pacheco, J.; Ruiz-Ascencio, J.; Rendón-Mancha, J.M. Visual simultaneous localization and mapping: A survey. Artif. Intell. Rev. 2015, 43, 55–81. [Google Scholar] [CrossRef]
- Se, S.; Lowe, D.; Little, J. Mobile robot localization and mapping with uncertainty using scale-invariant visual landmarks. Int. J. Robot. Res. 2002, 21, 735–758. [Google Scholar] [CrossRef]
- Olson, C.F.; Matthies, L.H.; Schoppers, M.; Maimone, M.W. Rover navigation using stereo ego-motion. Robot. Auton. Syst. 2003, 43, 215–229. [Google Scholar] [CrossRef]
- Davison, A.J. Real-Time Simultaneous Localisation and Mapping with a Single Camera. Proceedings Ninth IEEE International Conference on Computer Vision, Nice, France, 13–16 October 2003; p. 1403. [Google Scholar] [CrossRef]
- Zou, Z.; Shi, Z.; Guo, Y.; Ye, J.J. Object detection in 20 years: A survey. arXiv 2019, arXiv:05055. [Google Scholar]
- Kanellakis, C.; Nikolakopoulos, G. Survey on Computer Vision for UAVs: Current Developments and Trends. J. Intell. Robot. Syst. 2017, 87, 141–168. [Google Scholar] [CrossRef] [Green Version]
- Carnie, R.; Walker, R.; Corke, P. Image Processing Algorithms for UAV “Sense and Avoid”. In Proceedings of the 2006 IEEE International Conference on Robotics and Automation, ICRA 2006, Orlando, FL, USA, 1–19 May 2006; IEEE: Orlando, FL, USA, 2006; pp. 2848–2853. [Google Scholar] [CrossRef] [Green Version]
- Rodriguez, J.; Castiblanco, C.; Mondragon, I.; Colorado, J. Low-Cost Quadrotor Applied for Visual Detection of Landmine-Like Objects. In Proceedings of the 2014 International Conference on Unmanned Aircraft Systems (ICUAS), Orlando, FL, USA, 27–30 May 2014; IEEE: Orlando, FL, USA, 2014; pp. 83–88. [Google Scholar] [CrossRef]
- Teuliere, C.; Eck, L.; Marchand, E. Chasing a Moving Target from a Flying UAV. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; IEEE: San Francisco, CA, USA, 2011; pp. 4929–4934. [Google Scholar] [CrossRef] [Green Version]
- Lin, K.-H.; Chang, C.-H.; Dopfer, A.; Wang, C.-C. Mapping and Localization in 3D Environments Using a 2D Laser Scanner and a Stereo Camera. J. Inf. Sci. Eng. 2012, 28, 131–144. [Google Scholar]
- Yankun, Z.; Hong, C.; Weyrich, N. A Single Camera Based Rear Obstacle Detection System. In Proceedings of the 2011 IEEE Intelligent Vehicles Symposium (IV), Baden-Baden, Germany, 5–9 June 2011; IEEE: Baden-Baden, Germany, 2011; pp. 485–490. [Google Scholar] [CrossRef]
- Braillon, C.; Pradalier, C.; Crowley, J.L.; Laugier, C. Real-Time Moving Obstacle Detection Using Optical Flow Models. In Proceedings of the 2006 IEEE Intelligent Vehicles Symposium, Meguro-Ku, Japan, 13–15 June 2006; IEEE: Meguro-Ku, Japan, 2006; pp. 466–471. [Google Scholar] [CrossRef] [Green Version]
- Naito, T.; Ito, T.; Kaneda, Y. The Obstacle Detection Method Using Optical Flow Estimation at the Edge Image. In Proceedings of the 2007 IEEE Intelligent Vehicles Symposium, Istanbul, Turkey, 13–15 June 2007; IEEE: Istanbul, Turkey, 2007; pp. 817–822. [Google Scholar] [CrossRef]
- Gharani, P.; Karimi, H.A. Context-aware obstacle detection for navigation by visually impaired. Image Vis. Comput. 2017, 64, 103–115. [Google Scholar] [CrossRef]
- Agrawal, P.; Ratnoo, A.; Ghose, D. Inverse optical flow based guidance for UAV navigation through urban canyons. Aerosp. Sci. Technol. 2017, 68, 163–178. [Google Scholar] [CrossRef]
- Bharati, S.P.; Wu, Y.; Sui, Y.; Padgett, C.; Wang, G. Real-Time Obstacle Detection and Tracking for Sense-and-Avoid Mechanism in UAVs. IEEE Trans. Intell. Veh. 2018, 3, 185–197. [Google Scholar] [CrossRef]
- Capito, L.; Ozguner, U.; Redmill, K. Optical Flow Based Visual Potential Field for Autonomous Driving. In Proceedings of the 2020 IEEE Intelligent Vehicles Symposium (IV), Las Vegas, NV, USA, 20–23 October 2020; IEEE: Las Vegas, NV, USA, 2020; pp. 885–891. [Google Scholar] [CrossRef]
- Seunghun, J.; Junguk, C.; Xuan Dai, P.; Kyoung Mu, L.; Sung-Kee, P.; Munsang, K.; Jae Wook, J. FPGA Design and Implementation of a Real-Time Stereo Vision System. IEEE Trans. Circuits Syst. Video Technol. 2010, 20, 15–26. [Google Scholar] [CrossRef]
- Bertozzi, M.; Broggi, A.; Fascioli, A.; Nichele, S. Stereo Vision-Based Vehicle Detection. In Proceedings of the Proceedings of the IEEE Intelligent Vehicles Symposium 2000 (Cat. No. 00TH8511), Dearborn, MI, USA, 5 October 2000; IEEE: Dearborn, MI, USA, 2000; pp. 39–44. [Google Scholar] [CrossRef] [Green Version]
- Nedevschi, S.; Danescu, R.; Frentiu, D.; Marita, T.; Oniga, F.; Pocol, C.; Schmidt, R.; Graf, T. In High Accuracy Stereo Vision System for Far Distance Obstacle Detection. In Proceedings of the IEEE Intelligent Vehicles Symposium, Parma, Italy, 14–17 June 2004; IEEE: Parma, Italy, 2004; pp. 292–297. [Google Scholar] [CrossRef]
- Ma, Y.; Li, Q.; Chu, L.; Zhou, Y.; Xu, C. Real-Time Detection and Spatial Localization of Insulators for UAV Inspection Based on Binocular Stereo Vision. Remote Sens. 2021, 13, 230. [Google Scholar] [CrossRef]
- Huh, K.; Park, J.; Hwang, J.; Hong, D. A stereo vision-based obstacle detection system in vehicles. Opt. Lasers Eng. 2008, 46, 168–178. [Google Scholar] [CrossRef]
- García Carrillo, L.R.; Dzul López, A.E.; Lozano, R.; Pégard, C. Combining Stereo Vision and Inertial Navigation System for a Quad-Rotor UAV. J. Intell. Robot. Syst. 2011, 65, 373–387. [Google Scholar] [CrossRef]
- Arnay, R.; Hernandez-Aceituno, J.; Toledo, J.; Acosta, L. Laser and Optical Flow Fusion for a Non-Intrusive Obstacle Detection System on an Intelligent Wheelchair. IEEE Sens. J. 2018, 18, 3799–3805. [Google Scholar] [CrossRef]
- Chang, S.; Zhang, Y.; Zhang, F.; Zhao, X.; Huang, S.; Feng, Z.; Wei, Z. Spatial Attention Fusion for Obstacle Detection Using MmWave Radar and Vision Sensor. Sensors 2020, 20, 956. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Long, N.; Wang, K.; Cheng, R.; Hu, W.; Yang, K. Unifying obstacle detection, recognition, and fusion based on millimeter wave radar and RGB-depth sensors for the visually impaired. Rev. Sci. Instrum. 2019, 90, 044102. [Google Scholar] [CrossRef] [PubMed]
- Meichen, L.; Jun, C.; Xiang, Z.; Lu, W.; Yongpeng, T. Dynamic obstacle detection based on multi-sensor information fusion. Ifac-Papers 2018, 51, 861–865. [Google Scholar] [CrossRef]
- Zhang, X.; Zhou, M.; Qiu, P.; Huang, Y.; Li, J. Radar and vision fusion for the real-time obstacle detection and identification. Ind. Robot. Int. J. Robot. Res. Appl. 2019. [Google Scholar] [CrossRef]
- Zhang, J.; Han, J.; Wang, S.; Liao, Y.; Li, P. Real Time Obstacle Detection Method Based on Lidar and Wireless Sensor. In Proceedings of the 2017 Chinese Automation Congress (CAC), Jinan, China, 20–22 October 2017; IEEE: Jinan, China, 2017; pp. 5951–5955. [Google Scholar] [CrossRef]
- John, V.; Mita, S. RVNet: Deep Sensor Fusion of Monocular Camera and Radar for Image-Based Obstacle Detection in Challenging Environments. In Pacific-Rim Symposium on Image and Video Technology; Springer: Berlin/Heidelberg, Germany, 2019; pp. 351–364. [Google Scholar] [CrossRef]
- Lumelsky, V.J.; Stepanov, A.A. Path-planning strategies for a point mobile automaton moving amidst unknown obstacles of arbitrary shape. Algorithmica 1987, 2, 403–430. [Google Scholar] [CrossRef] [Green Version]
- Kamon, I.; Rimon, E.; Rivlin, E. TangentBug: A Range-Sensor-Based Navigation Algorithm. Int. J. Robot. Res. 2016, 17, 934–953. [Google Scholar] [CrossRef]
- Taylor, K.; LaValle, S.M. I-Bug: An Intensity-Based Bug Algorithm. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; IEEE: Kobe, Japan, 2009; pp. 3981–3986. [Google Scholar] [CrossRef] [Green Version]
- Zohaib, M.; Pasha, S.M.; Javaid, N.; Iqbal, J. IBA: Intelligent Bug Algorithm—A Novel Strategy to Navigate Mobile Robots Autonomously. In Communication Technologies, Information Security and Sustainable Development; Springer: Cham, Switzerland, 2014; pp. 291–299. [Google Scholar] [CrossRef]
- Sharma, N.; Pinto, J.; Sujit, P. BugFlood: A bug inspired algorithm for efficient path planning in an obstacle rich environment. In Proceedings of the AIAA Infotech@ Aerospace, San Diego, CA, USA, 4–8 January 2016; p. 0254. [Google Scholar] [CrossRef]
- Ng, J.; Bräunl, T. Performance Comparison of Bug Navigation Algorithms. J. Intell. Robot. Syst. 2007, 50, 73–84. [Google Scholar] [CrossRef]
- Yufka, A.; Parlaktuna, O. Performance Comparison of Bug Algorithms for Mobile Robots. In Proceedings of the 5th International Advanced Technologies Symposium, Karabuk, Turkey, 13–15 May 2009; pp. 13–15. [Google Scholar]
- Khatib, O. Real-time obstacle avoidance for manipulators and mobile robots. In Autonomous Robot Vehicles; Springer: Berlin/Heidelberg, Germany, 1986; pp. 396–404. [Google Scholar] [CrossRef]
- Cetin, O.; Zagli, I.; Yilmaz, G. Establishing Obstacle and Collision Free Communication Relay for UAVs with Artificial Potential Fields. J. Intell. Robot. Syst. 2012, 69, 361–372. [Google Scholar] [CrossRef]
- Chen, Y.-B.; Luo, G.-C.; Mei, Y.-S.; Yu, J.-Q.; Su, X.-L. UAV path planning using artificial potential field method updated by optimal control theory. Int. J. Syst. Sci. 2014, 47, 1407–1420. [Google Scholar] [CrossRef]
- Sun, J.; Tang, J.; Lao, S. Collision Avoidance for Cooperative UAVs With Optimized Artificial Potential Field Algorithm. IEEE Access 2017, 5, 18382–18390. [Google Scholar] [CrossRef]
- Fan, X.; Guo, Y.; Liu, H.; Wei, B.; Lyu, W. Improved Artificial Potential Field Method Applied for AUV Path Planning. Math. Probl. Eng. 2020, 2020, 6523158. [Google Scholar] [CrossRef]
- Goss, J.; Rajvanshi, R.; Subbarao, K. Aircraft Conflict Detection and Resolution Using Mixed Geometric and Collision Cone Approaches. In Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit , Rhode, Island, 16–19 August 2004; p. 4879. [Google Scholar] [CrossRef]
- Watanabe, Y.; Calise, A.; Johnson, E. Vision-based obstacle avoidance for UAVs. In Proceedings of the AIAA Guidance, Navigation and Control Conference and Exhibit, Hilton Head, South Carolina, 20–23 August 2007; p. 6829. [Google Scholar]
- Chakravarthy, A.; Ghose, D. Generalization of the collision cone approach for motion safety in 3-D environments. Auton. Robot. 2011, 32, 243–266. [Google Scholar] [CrossRef]
- Sunkara, V.; Chakravarthy, A.; Ghose, D. Collision Avoidance of Arbitrarily Shaped Deforming Objects Using Collision Cones. IEEE Robot. Autom. Lett. 2019, 4, 2156–2163. [Google Scholar] [CrossRef]
- Zadeh, L.A. Information and control. Fuzzy Sets 1965, 8, 338–353. [Google Scholar]
- Lian, S.H. Fuzzy Logic Control of an Obstacle Avoidance Robot. Proceedings of IEEE 5th International Fuzzy Systems, New Orleans, LA, USA, 8–11 September 1996; IEEE: New Orleans, LA, USA, 1996; pp. 26–30. [Google Scholar] [CrossRef]
- Driankov, D.; Saffiotti, A. Fuzzy Logic Techniques for Autonomous Vehicle Navigation; Physica: Amsterdam, The Netherlands, 2013; Volume 61. [Google Scholar]
- Reignier, P. Fuzzy logic techniques for mobile robot obstacle avoidance. Robot. Auton. Syst. 1994, 12, 143–153. [Google Scholar] [CrossRef]
- Dong, T.; Liao, X.; Zhang, R.; Sun, Z.; Song, Y. Path Tracking and Obstacles Avoidance of Uavs-Fuzzy Logic Approach. In Proceedings of the 14th IEEE International Conference on Fuzzy Systems, 2005. FUZZ’05, Reno, NV, USA, 11–14 July 2005; IEEE: Reno, NV, USA, 2005; pp. 43–48. [Google Scholar] [CrossRef]
- Jin, T.-S. Obstacle Avoidance of Mobile Robot Based on Behavior Hierarchy by Fuzzy Logic. Int. J. Fuzzy Log. Intell. Syst. 2012, 12, 245–249. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Choi, B.-J. Design of obstacle avoidance system for mobile robot using fuzzy logic systems. Int. J. Smart Home 2013, 7, 321–328. [Google Scholar]
- Pandey, A.; Sonkar, R.K.; Pandey, K.K.; Parhi, D. Path Planning Navigation of Mobile Robot with Obstacles Avoidance Using Fuzzy Logic Controller. In Proceedings of the 2014 IEEE 8th International Conference on Intelligent Systems and Control (ISCO), Coimbatore, India, 10–11 January 2014; IEEE: Coimbatore, India, 2014; pp. 39–41. [Google Scholar] [CrossRef]
- Ulrich, I.; Borenstein, J. In VFH+: Reliable Obstacle Avoidance for Fast Mobile Robots. In Proceedings of the 1998 IEEE international conference on robotics and automation (Cat. No. 98CH36146), Leuven, Belgium, 20 May 1998; IEEE: Leuven, Belgium, 1998; pp. 1572–1577. [Google Scholar] [CrossRef]
- Ulrich, I.; Borenstein, J. VFH/sup*: Local Obstacle Avoidance with Look-Ahead Verification. In Proceedings of the 2000 ICRA. Millennium Conference. IEEE International Conference on Robotics and Automation. Symposia Proceedings (Cat. No. 00CH37065), San Francisco, CA, USA, 24–28 April 2000; pp. 2505–2511. [Google Scholar] [CrossRef]
- Sary, I.P.; Nugraha, Y.P.; Megayanti, M.; Hidayat, E.; Trilaksono, B.R. Design of Obstacle Avoidance System on Hexacopter Using Vector Field Histogram-Plus. In Proceedings of the 2018 IEEE 8th International Conference on System Engineering and Technology (ICSET), Bandung, Indonesia, 15–16 October 2018; IEEE: Bandung, Indonesia, 2018; pp. 18–23. [Google Scholar] [CrossRef]
- Bolbhat, S.; Bhosale, A.; Sakthivel, G.; Saravanakumar, D.; Sivakumar, R.; Lakshmipathi, J. Intelligent Obstacle Avoiding AGV Using Vector Field Histogram and Supervisory Control; Journal of Physics: Conference Series; IOP Publishing: Chennai, India, 2020; p. 012030. [Google Scholar] [CrossRef]
- Gupta, M.; Jin, L.; Homma, N. Static and Dynamic Neural Networks: From Fundamentals to Advanced Theory; John Wiley & Sons: Hoboken, NJ, USA, 2004. [Google Scholar]
- Glasius, R.; Komoda, A.; Gielen, S.C.A.M. Neural Network Dynamics for Path Planning and Obstacle Avoidance. Neural. Netw. 1995, 8, 125–133. [Google Scholar] [CrossRef]
- Huang, B.-Q.; Cao, G.-Y.; Guo, M. Reinforcement Learning Neural Network to the Problem of Autonomous Mobile Robot Obstacle Avoidance. In Proceedings of the 2005 International Conference on Machine Learning and Cybernetics, Guangzhou, China, 18–21 August 2005; IEEE: Guangzhou, China, 2005; pp. 85–89. [Google Scholar] [CrossRef]
- Yadav, V.; Wang, X.; Balakrishnan, S. Neural Network Approach for Obstacle Avoidance in 3-D Environments for UAVs. In Proceedings of the 2006 American Control Conference, Minneapolis, MN, USA, 14–16 June 2006; IEEE: Minneapolis, MN, USA, 2006; p. 6. [Google Scholar] [CrossRef]
- Chi, K.-H.; Lee, M.-F.R. Obstacle Avoidance in Mobile Robot Using Neural Network. In Proceedings of the 2011 International Conference on Consumer Electronics, Communications and Networks (CECNet), Xianning, China, 16–18 April 2011; IEEE: Xianning, China, 2011; pp. 5082–5085. [Google Scholar] [CrossRef]
- Kim, C.-J.; Chwa, D. Obstacle Avoidance Method for Wheeled Mobile Robots Using Interval Type-2 Fuzzy Neural Network. IEEE Trans. Fuzzy Syst. 2015, 23, 677–687. [Google Scholar] [CrossRef]
- Back, S.; Cho, G.; Oh, J.; Tran, X.-T.; Oh, H. Autonomous UAV Trail Navigation with Obstacle Avoidance Using Deep Neural Networks. J. Intell. Robot. Syst. 2020, 100, 1195–1211. [Google Scholar] [CrossRef]
- Dai, X.; Mao, Y.; Huang, T.; Qin, N.; Huang, D.; Li, Y. Automatic obstacle avoidance of quadrotor UAV via CNN-based learning. Neurocomputing 2020, 402, 346–358. [Google Scholar] [CrossRef]
- He, R.; Wei, R.; Zhang, Q. UAV autonomous collision avoidance approach. Automatika 2017, 58, 195–204. [Google Scholar] [CrossRef] [Green Version]















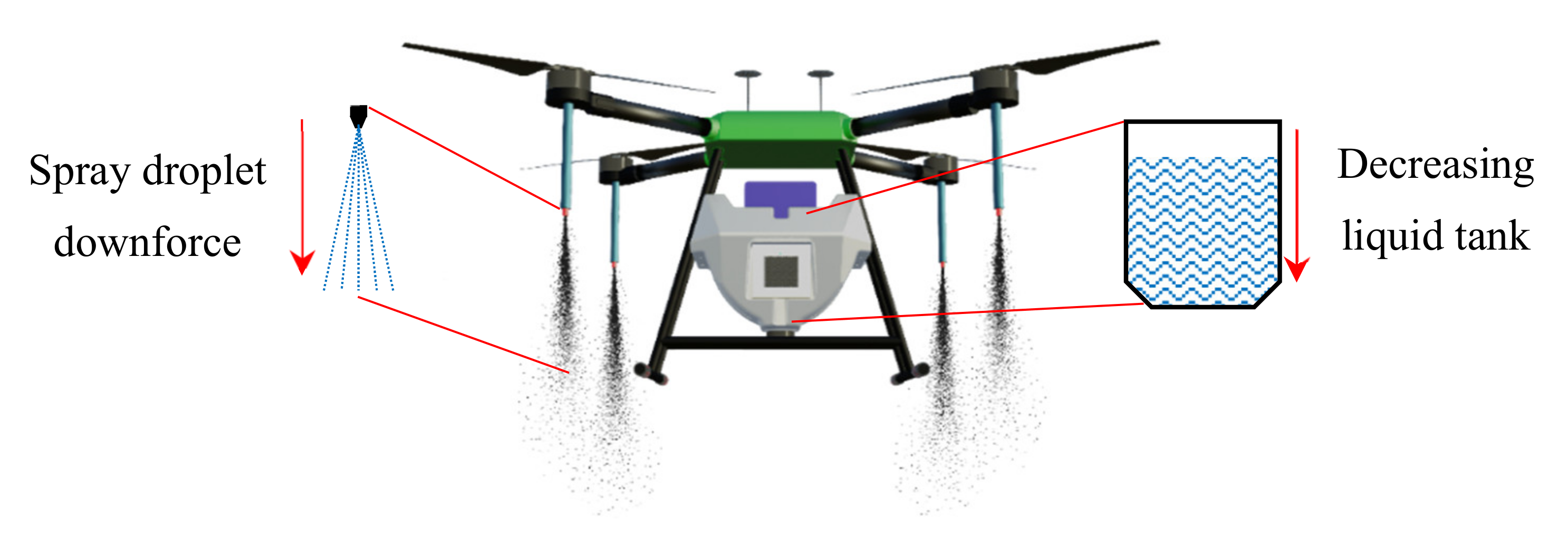{kind=link}
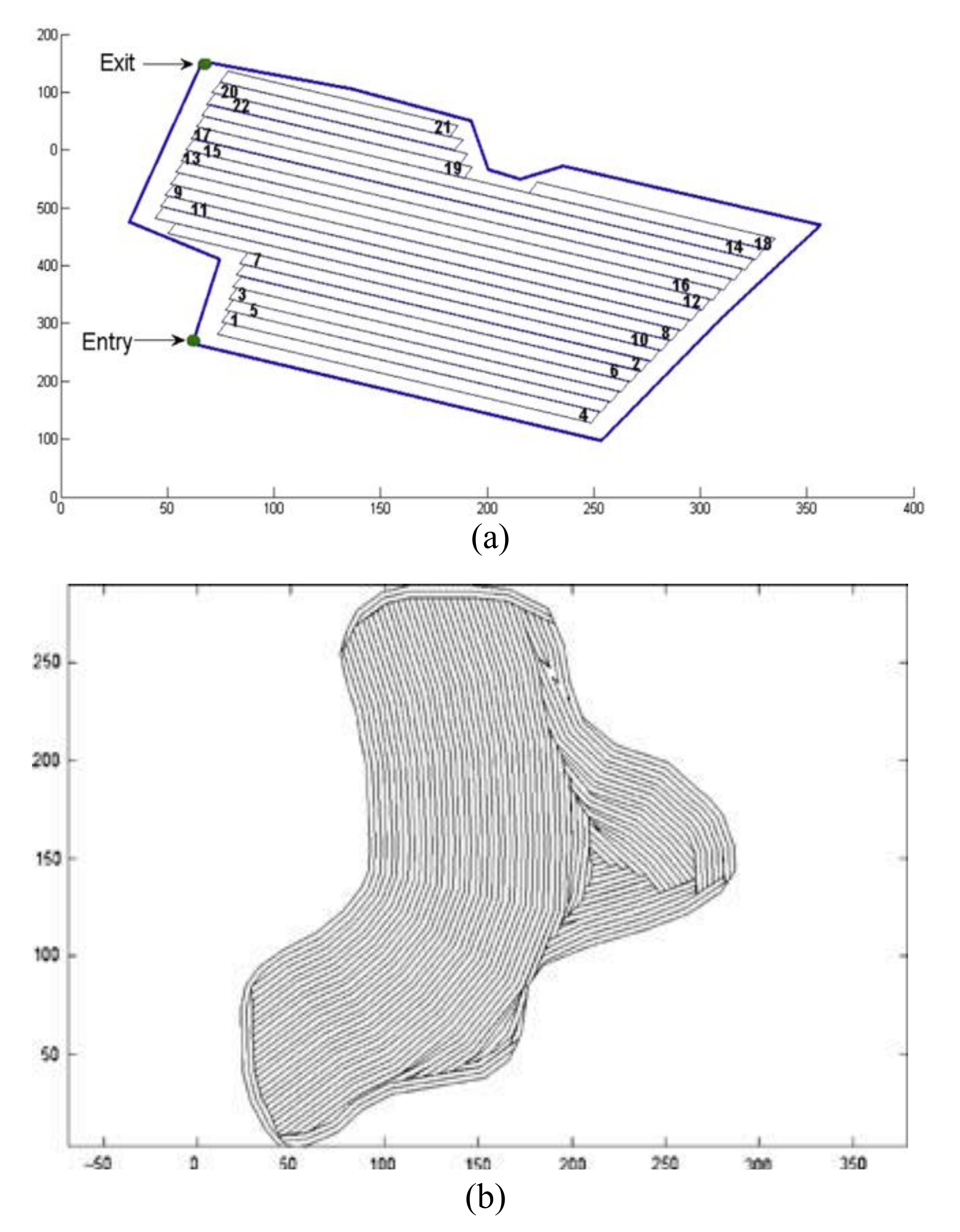{kind=link}
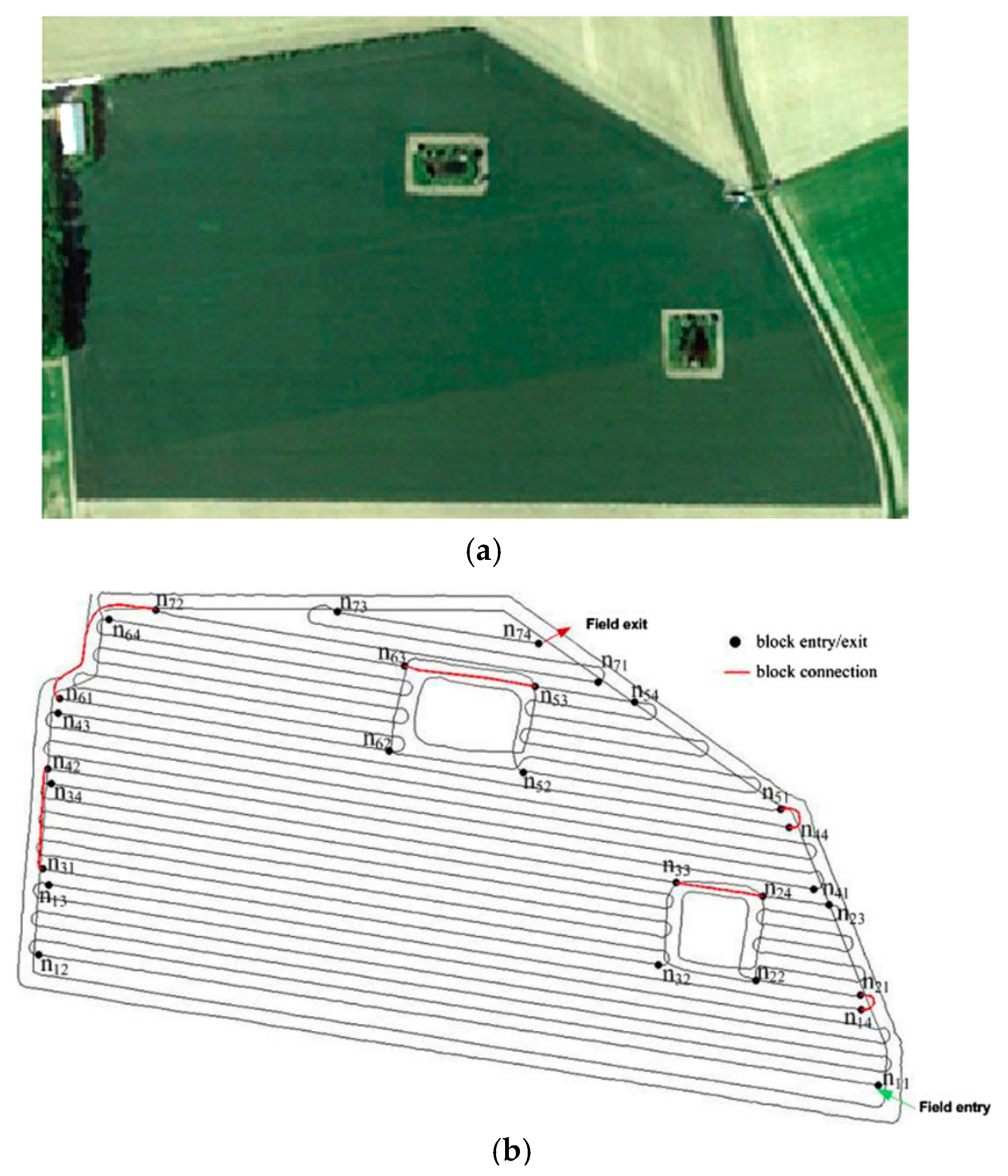{kind=link}
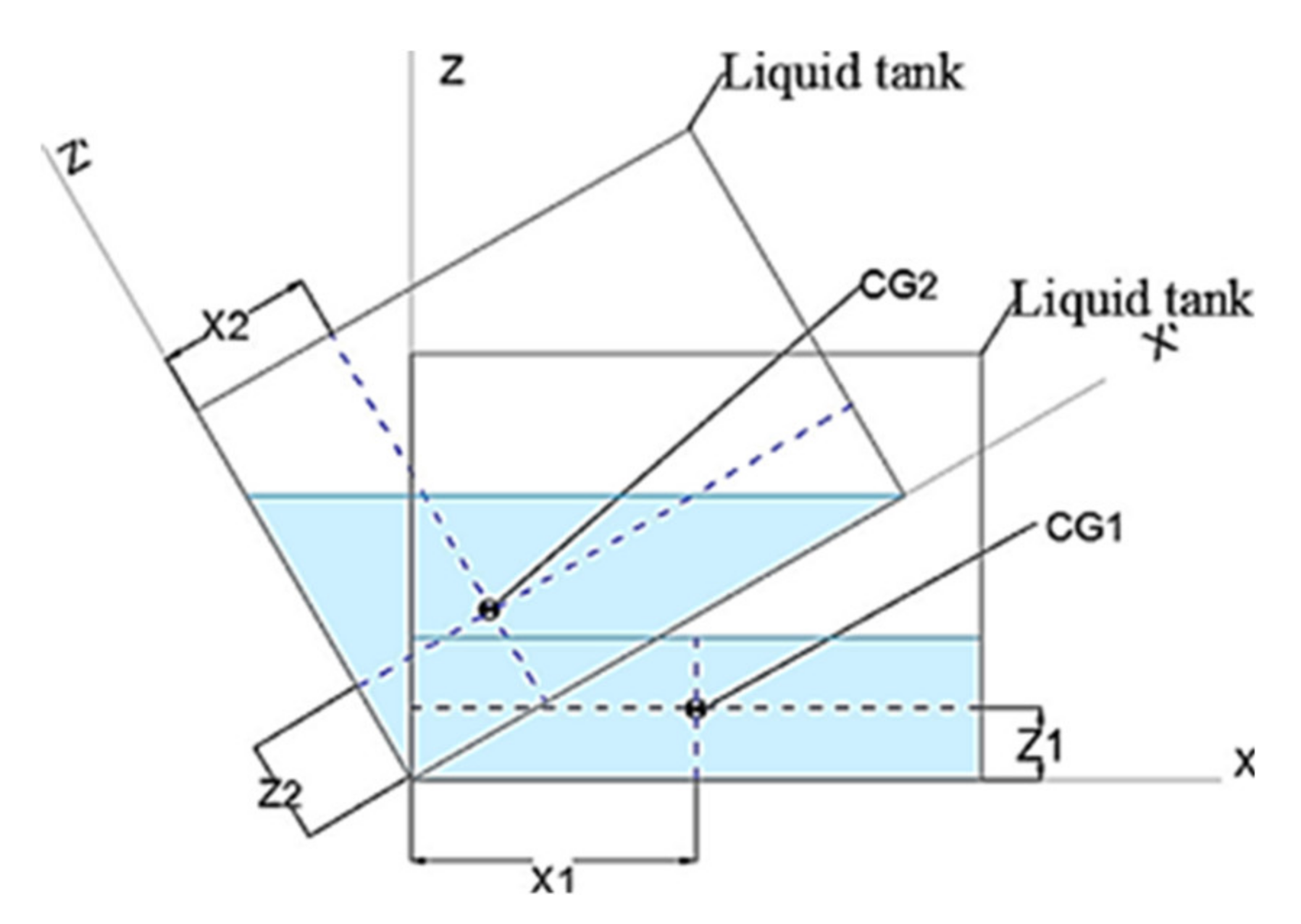{kind=link}
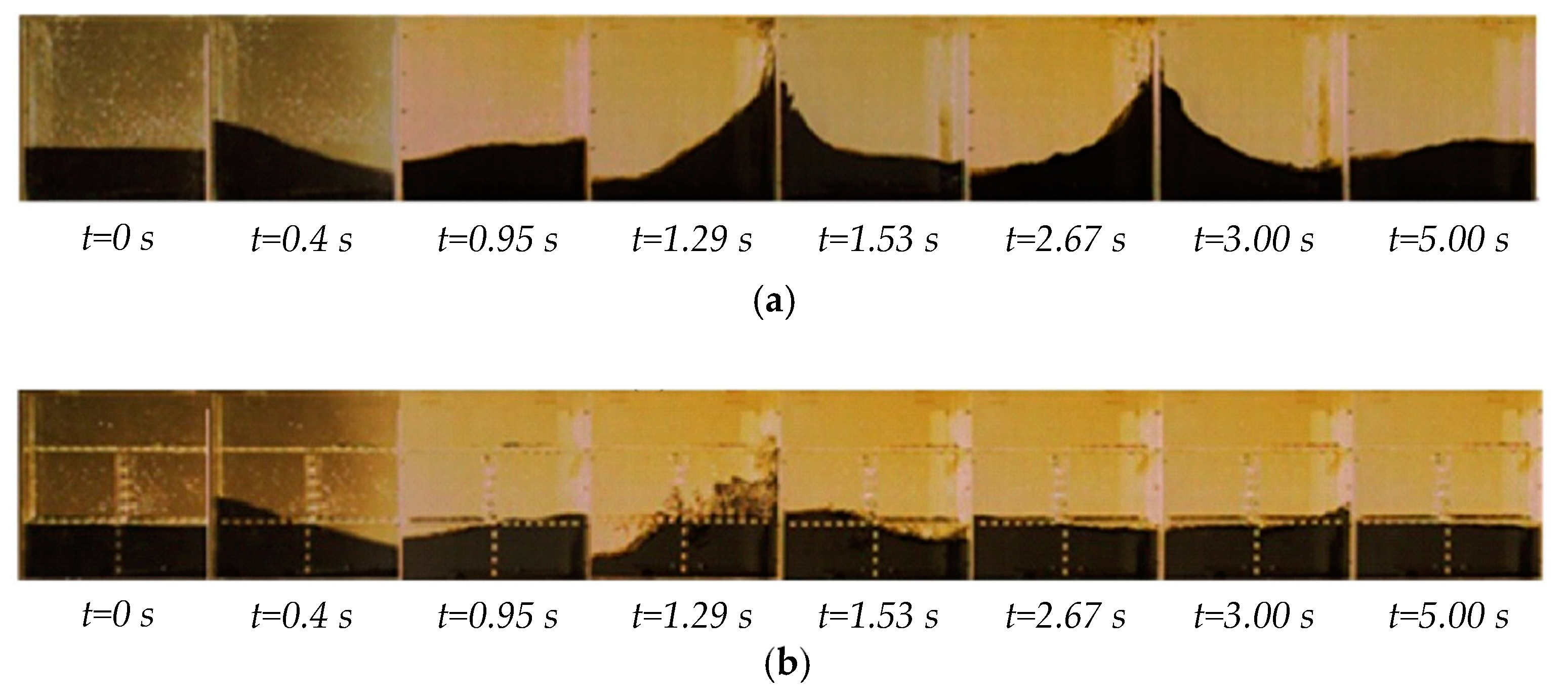{kind=link}
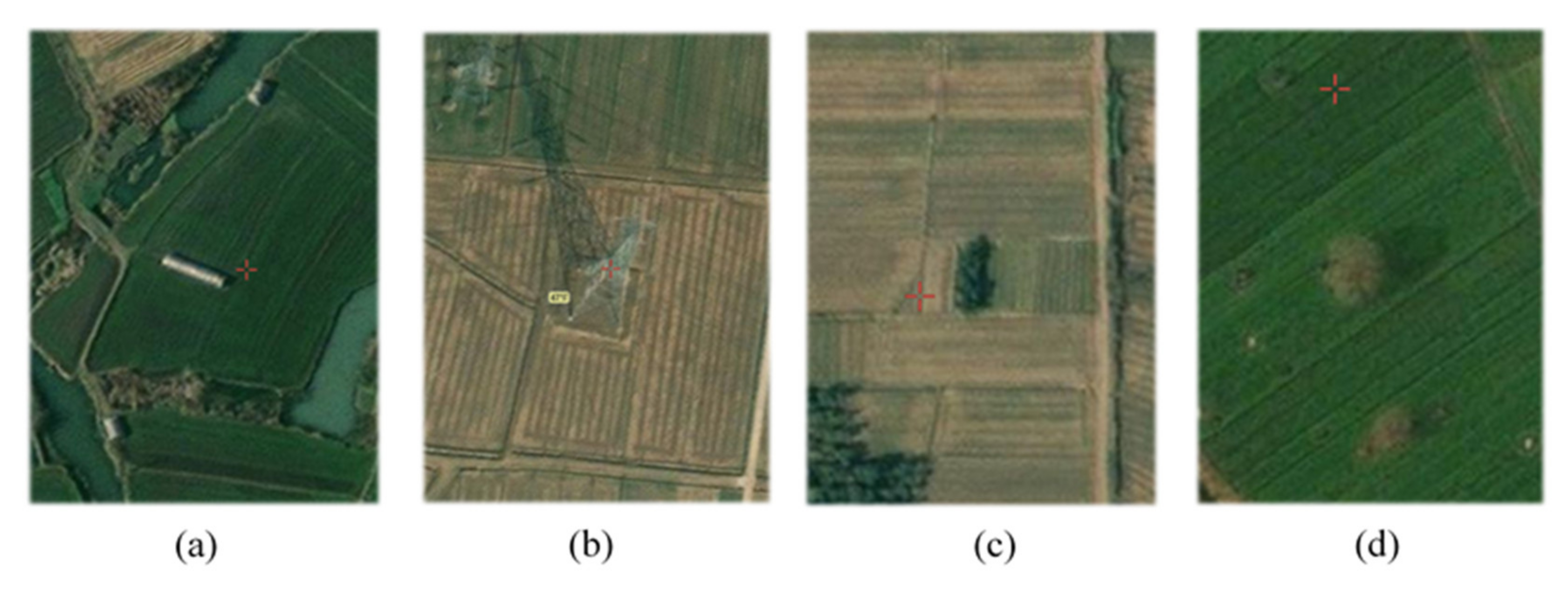{kind=link}
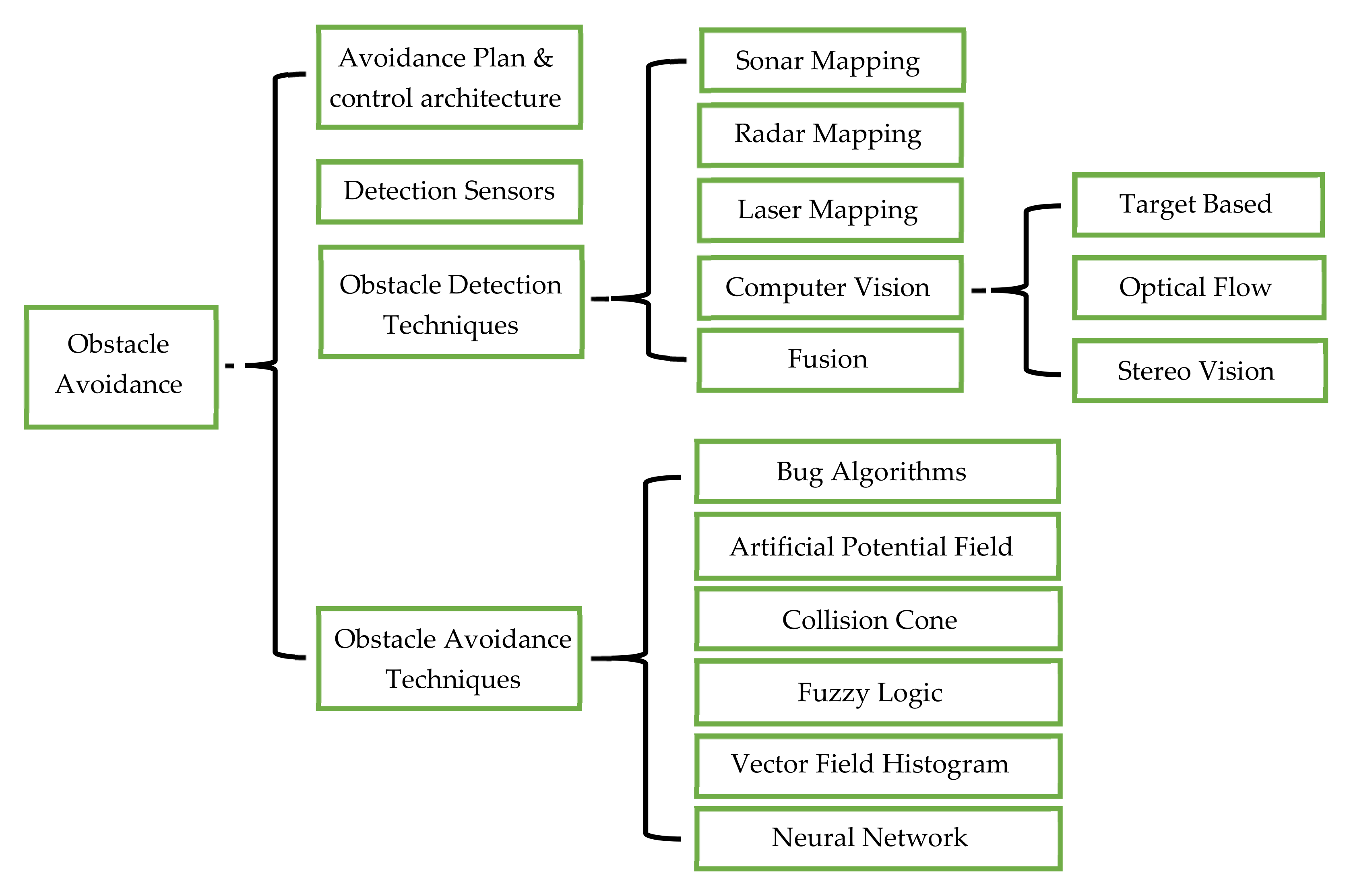{kind=link}
{kind=link}
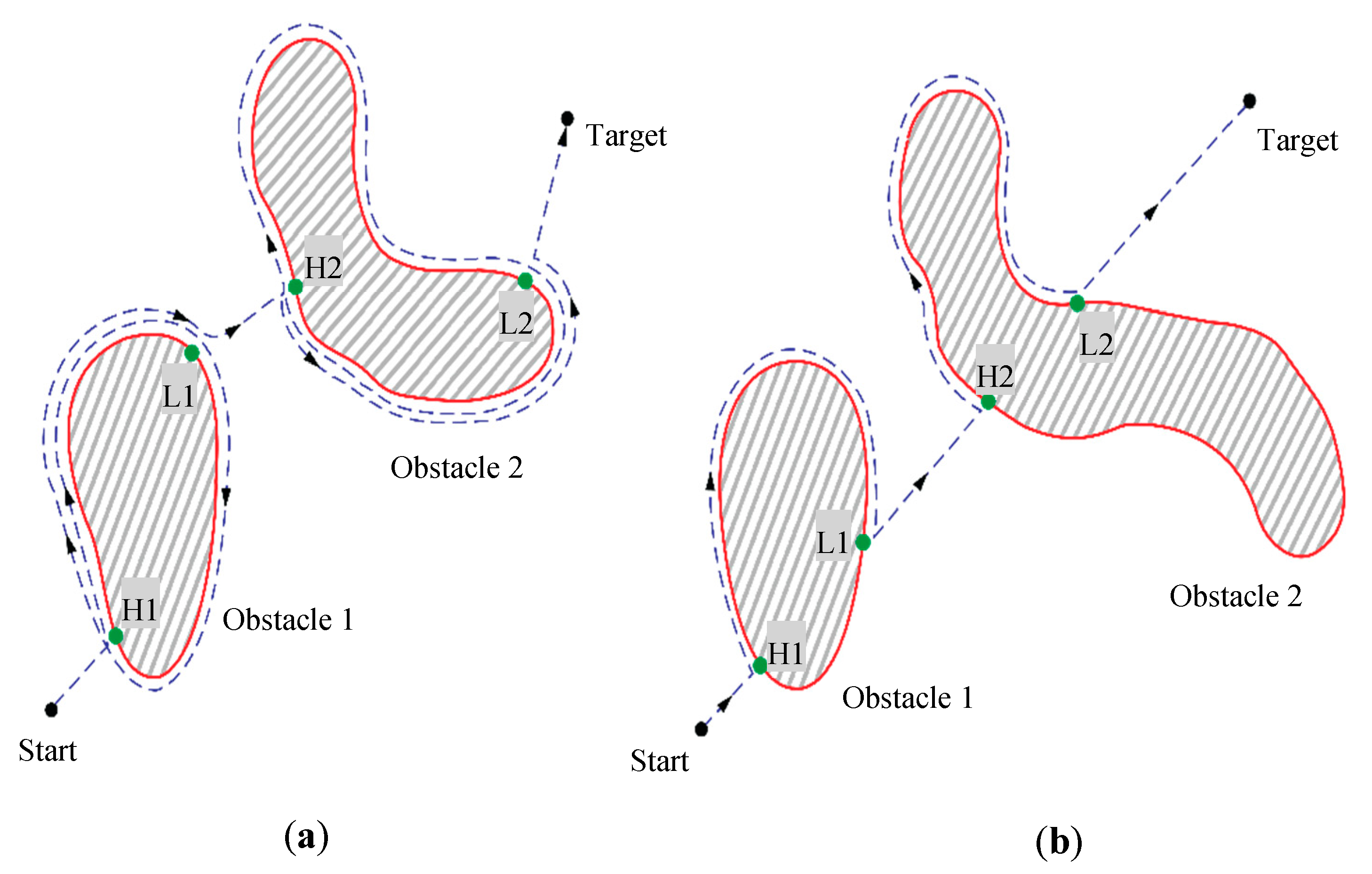{kind=link}
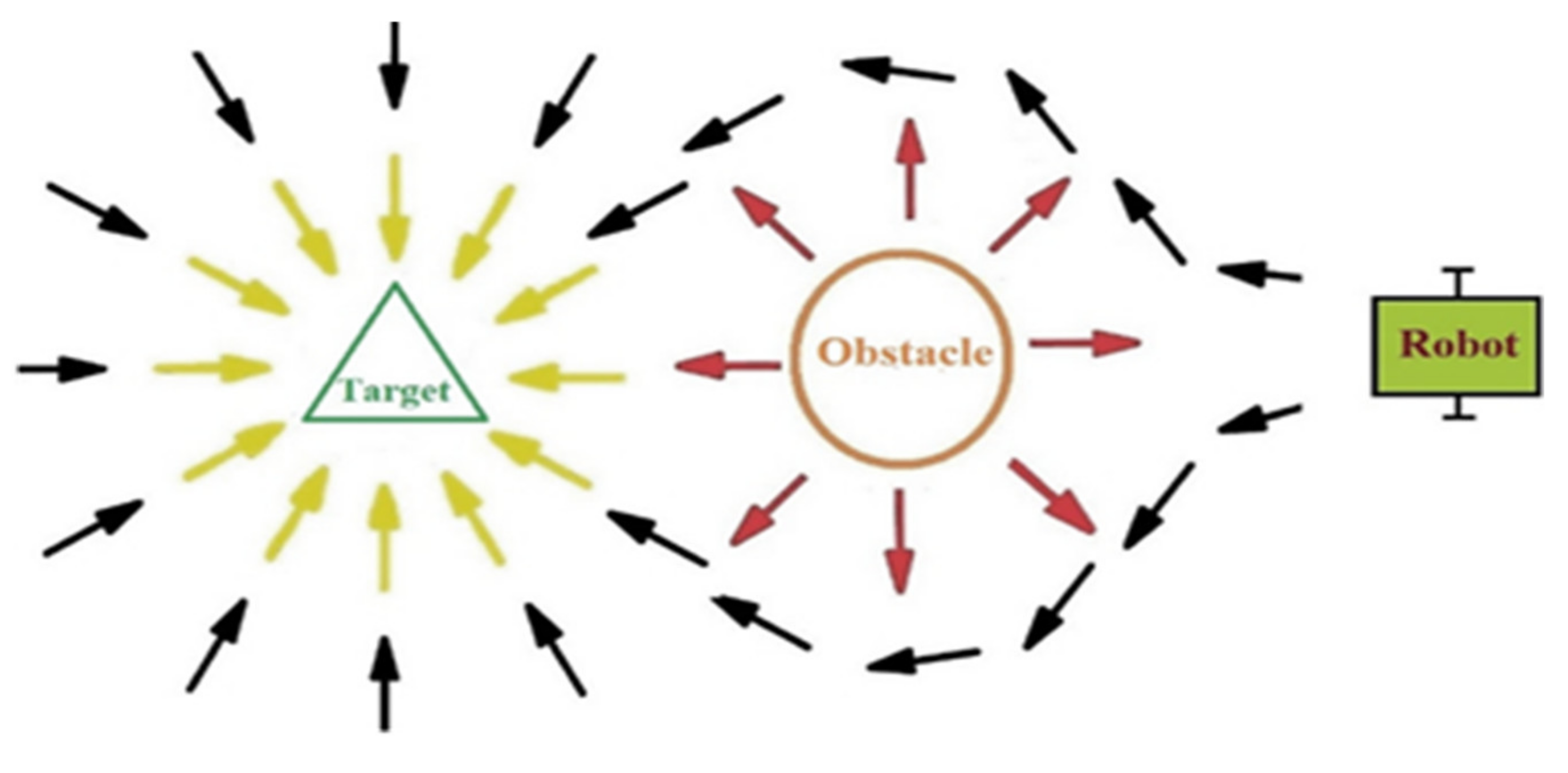{kind=link}
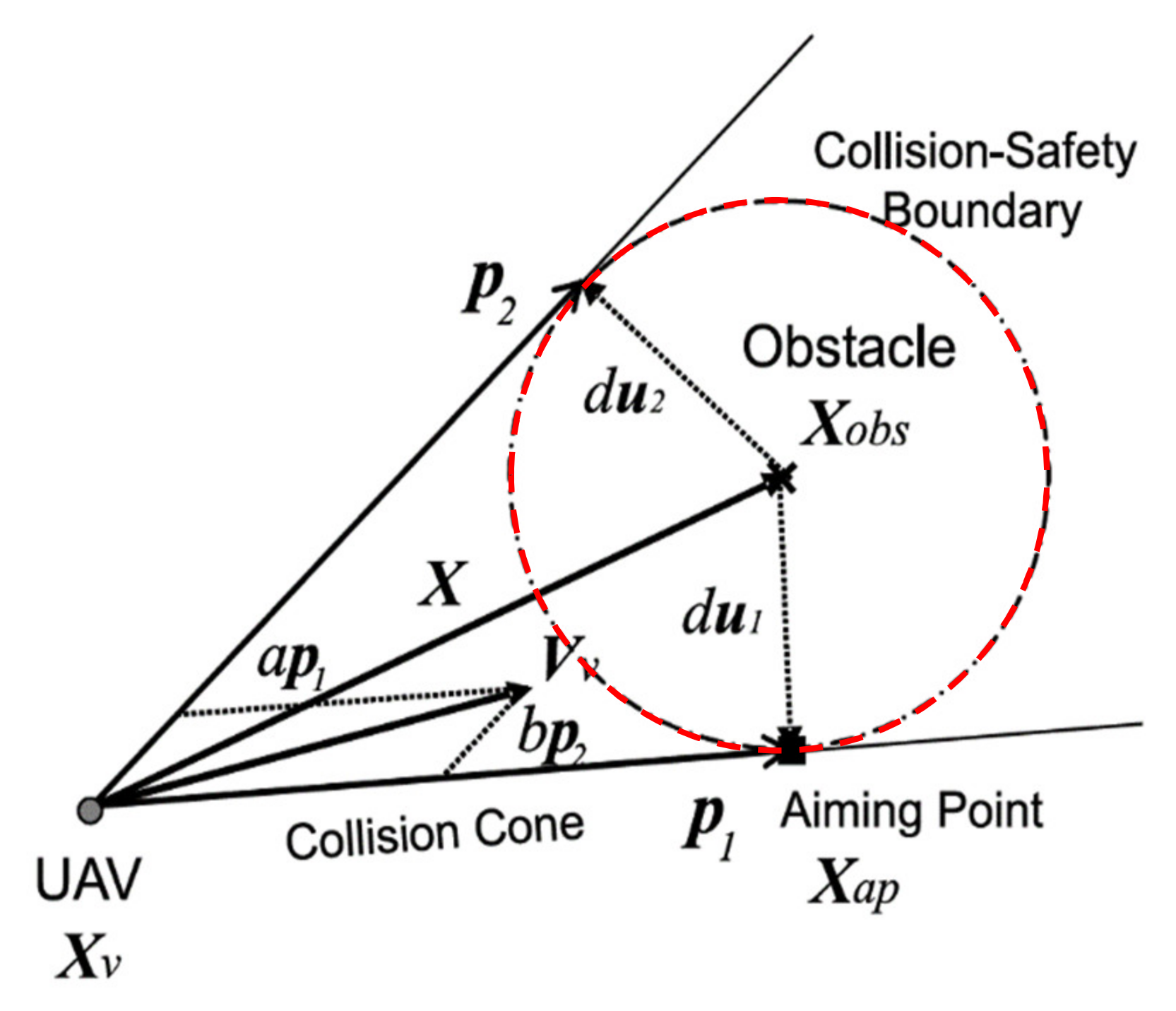{kind=link}
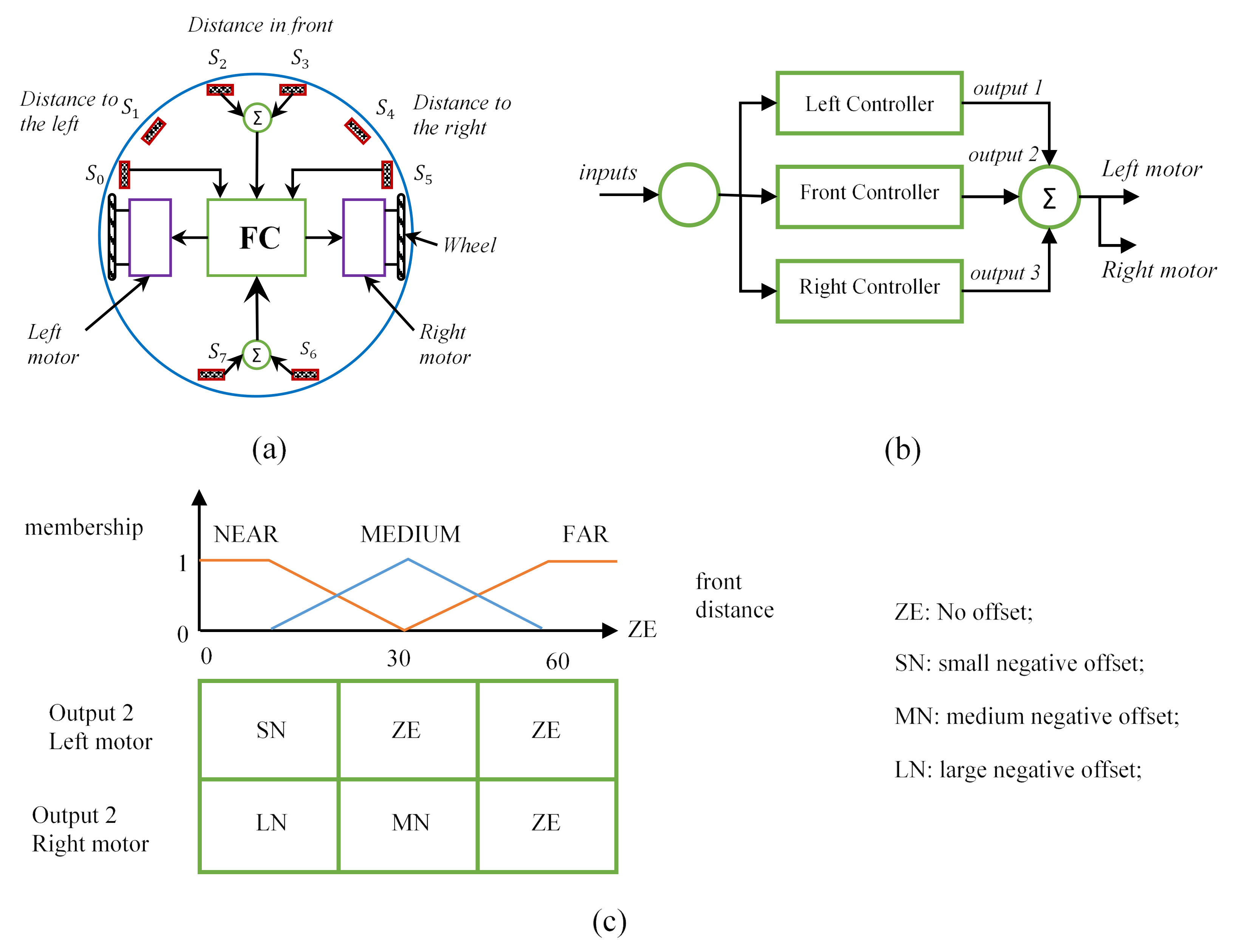{kind=link}
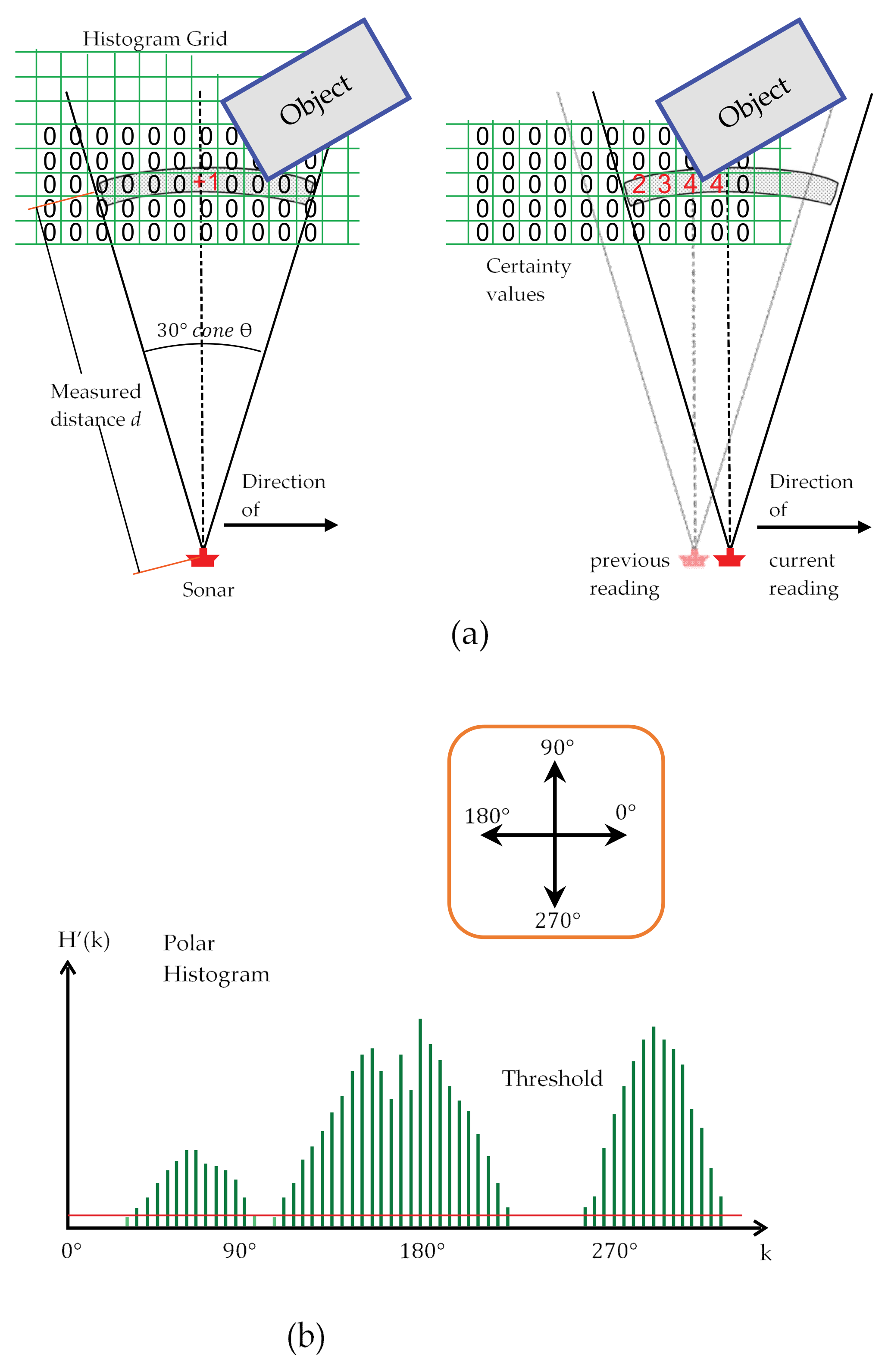{kind=link}
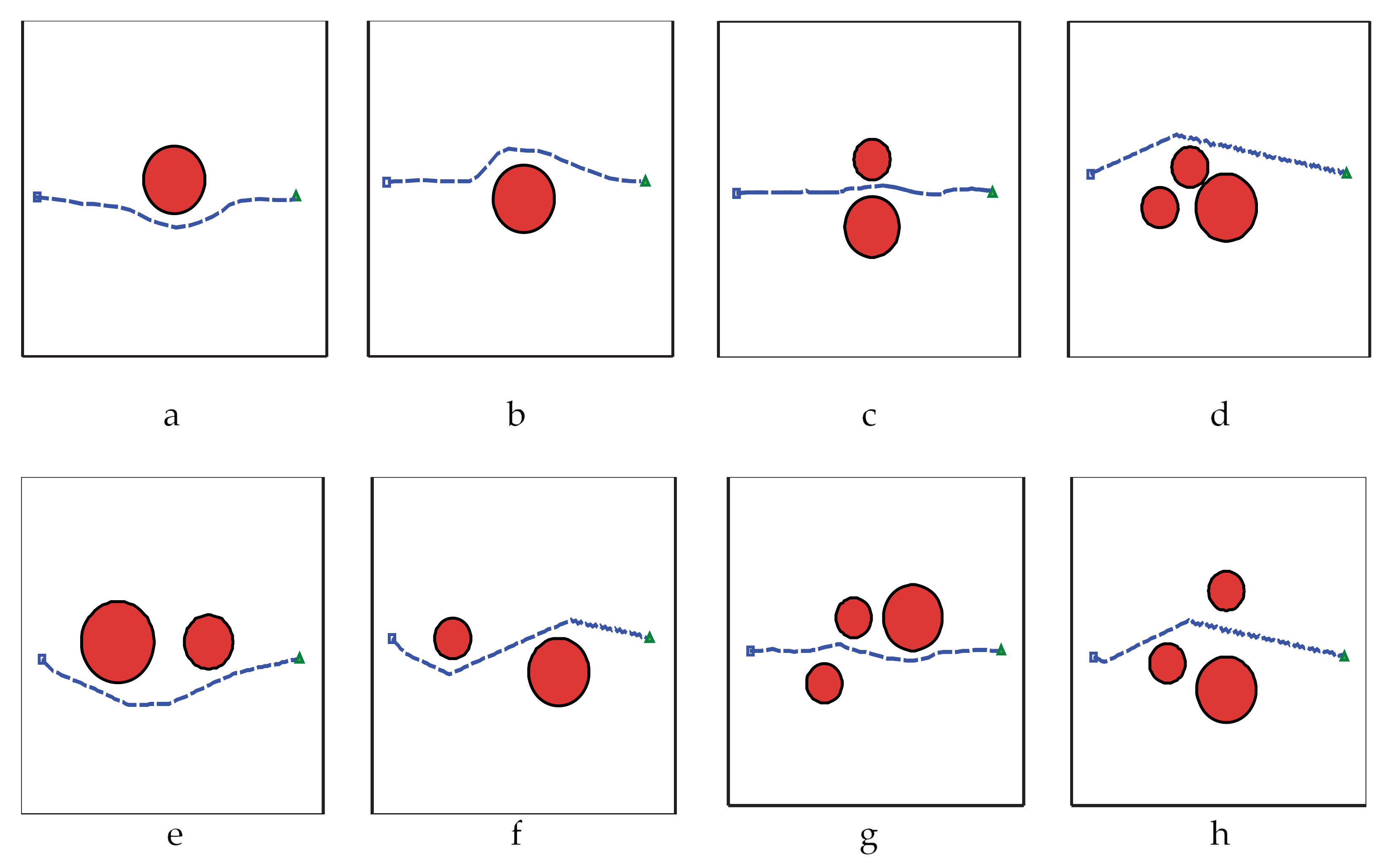{kind=link}
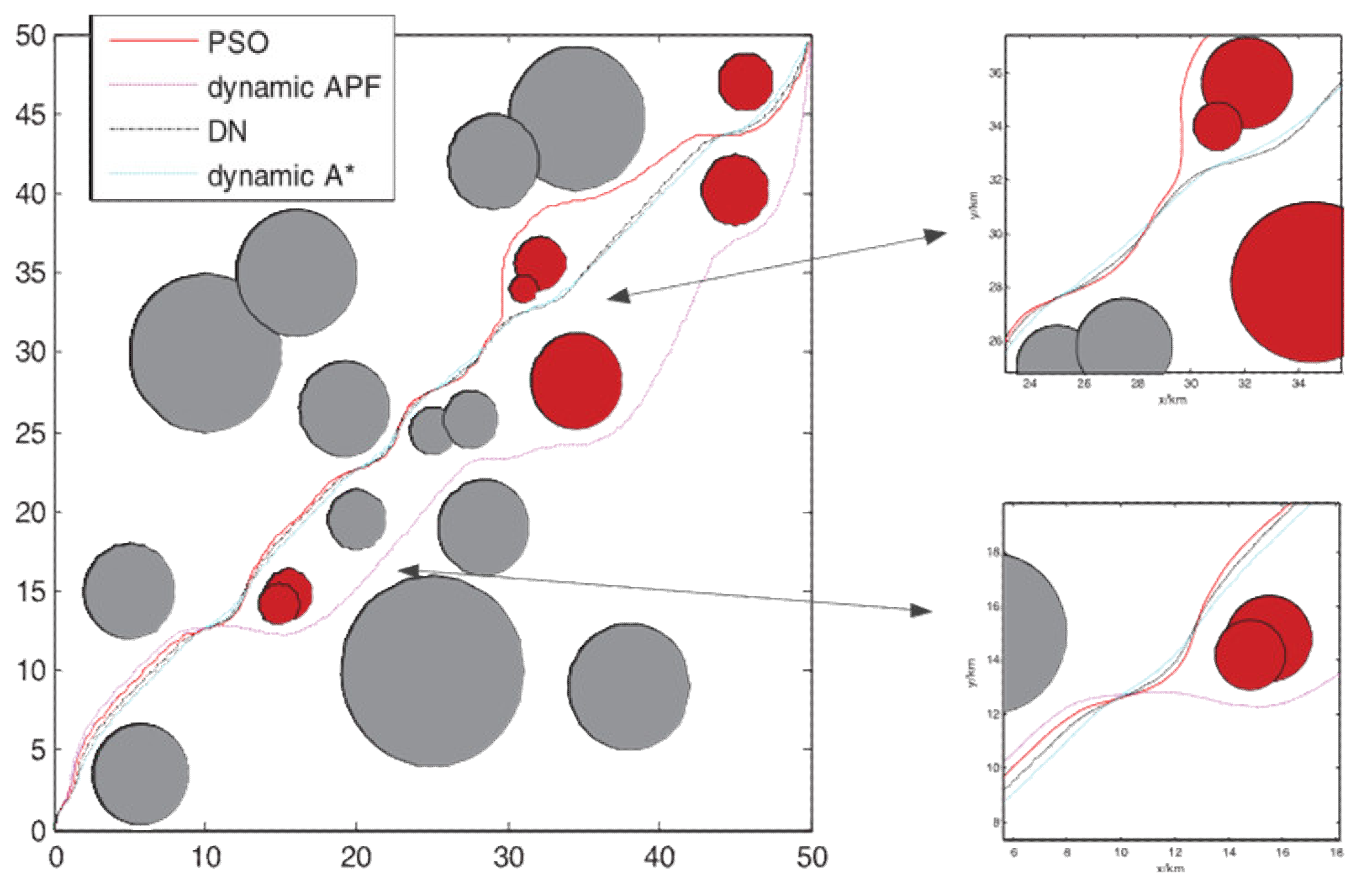{kind=link}
| Obstacle | In Flying Zone | Removable/ Replicable | Solution | Comment |
|---|---|---|---|---|
| Local electric wire for pump or other farm-related use | Yes | Yes | Rewiring | - |
| Gridline electric wire | No | No | - | Not concern |
| Plant brunch | Yes | Yes | Trimming | - |
| Protruding plant | Yes | Yes | Replace or Trimming | |
| Test pole | - | - | - | These test poles use for research, and mostly high as the plants |
| Nylon net | - | - | - | These nets are for covering the plants from birds |
| Metal net | - | - | - | These nets use for the boundary |
| Group trees | Yes | Yes | If not cut down or remove, avoid by UAV | Group of trees can be detected from the satellite image and can be filtered from the mission planner [70] |
| Single tree | Yes | Yes | If not cut down or remove, avoid by UAV | - |
| Telegraph pole + wooden pole + small electrical pole | Yes | No | Avoid by UAV | - |
| Windmill | Yes | No | Avoid by UAV | - |
| Pergola | Yes | No | Avoid by UAV | - |
| Small house/pump house | Yes | No | Avoid by UAV | - |
| Big house | Yes | No | Avoid by UAV | Can be detected from the satellite image and can be filtered from the mission planner [70] |
| High-pressure tower | Yes | No | Avoid by UAV | - |
| Meteorological tower | Yes | No | Avoid by UAV | - |
| Birds | Yes | No | - | Birds are the most unpredicted dangerous moving obstacle for all kind of aircraft |
| Other drones | Yes | Yes | - | - |
| Human | Yes | Yes | - | - |
| Other moving non-living things | Yes | Yes | - | - |
| Sensor Types | Ultrasonic | Laser/Initiative Infrared Sensor | Structured Light Sensor | ToF | Millimeter-Wave Radar | Monocular Vision | Binocular Vision |
|---|---|---|---|---|---|---|---|
| Range | <10 | <50 | <10 | <10 | <250 | <10 | <100 |
| Cost | Low | Medium | Very High | Medium | High | Medium | High |
| Precision | Short Range | Very High | Very High | Medium | Low | Low | Medium |
| Resolution | Low | Very High | Very High | Low | Low | Medium | Medium |
| Reliability | Low | High | High | High | High | Medium | Medium |
| Liquid Droplet Influence | Yes | Yes | Yes | Yes | No | Yes | Yes |
| Sound Influence | High-Pitched Sound Interference | No | No | No | No | No | No |
| Light Influence | No | Direct Sunlight May Influence Infrared | Very High | Very High | No | No | No |
| Temperature Influence | Yes | No | No | No | No | No | No |
| Light Need | No | No | No | No | No | Yes | Yes |
| Single Point Measurement Reliability | No | - | Yes | - | No | Suitable for Static Obstacle | - |
| Process | Fast | Fast | Medium | Fast | Fast | Large Amount Data Need Faster Processor | Large Amount Data Need Faster Processor |
| Reference | [130,131,144,145,146] | [132,147,148,149] | [133,150] | [135,151,152] | [136,153,154] | [121,122,155,156] | [157,158,159,160] |
| Avoidance Technique | Features | Sprayer UAV’s Insights |
|---|---|---|
| Bug2 Algorithm |
| This algorithm may suitable for rotorcraft UAVs. It can ensure the coverage of spraying because of following the exact border of the obstacle. But changing direction for every edge of the obstacle may increase avoidance time. Modifying the algorithm by fixing the heading direction may reduce the time duration. |
| Artificial Potential Field |
| This method can use for finding the shorter avoidance direction according to the edge of the obstacle. But because the sprayer UAV operated based on waypoints, the avoidance may search the next waypoint as the target and change the coverage path line. |
| Collision Cone |
| Because the sprayer UAV carries a liquid load that decreases continuously, this method may reduce the avoidance time by using the vehicle information. But in case of larger obstacles may consider the spray coverage. |
| Fuzzy Logic |
| The multisensory system mostly uses low-cost sensors, which may reduce the UAV’s retail price and increase availability for poor farmers. But it also has an issue with heading change. |
| Vector Field Histogram |
| Expensive UAV’s uses Lidar sensor for detecting an obstacle, which is suitable for this method. An up-gradation of including vehicle details may increase the performance of the avoidance procedure. |
| Neural Network |
| On farmland, most obstacles are known and categorized. A collection of training data may create a perfect avoidance performance for particular models. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ahmed, S.; Qiu, B.; Ahmad, F.; Kong, C.-W.; Xin, H. A State-of-the-Art Analysis of Obstacle Avoidance Methods from the Perspective of an Agricultural Sprayer UAV’s Operation Scenario. Agronomy 2021, 11, 1069. https://doi.org/10.3390/agronomy11061069
Ahmed S, Qiu B, Ahmad F, Kong C-W, Xin H. A State-of-the-Art Analysis of Obstacle Avoidance Methods from the Perspective of an Agricultural Sprayer UAV’s Operation Scenario. Agronomy. 2021; 11(6):1069. https://doi.org/10.3390/agronomy11061069
Chicago/Turabian StyleAhmed, Shibbir, Baijing Qiu, Fiaz Ahmad, Chun-Wei Kong, and Huang Xin. 2021. "A State-of-the-Art Analysis of Obstacle Avoidance Methods from the Perspective of an Agricultural Sprayer UAV’s Operation Scenario" Agronomy 11, no. 6: 1069. https://doi.org/10.3390/agronomy11061069