1. Introduction
Monitoring battery operation and measuring battery aging in real life have been a challenging goal that includes a number of complex processes under complicated operating conditions. The state of charge (SOC) and state of health (SOH) of the lithium-iron-phosphate (LiFePO
4) battery must be estimated with an accurate method [
1,
2]. In addition, batteries work under variable aging and thermal conditions. Therefore, a battery observation system to monitor the aging and the operation needs to be built. This is a multi-control problem that needs to be expressed via mathematical equations and a combined thermal model, electrical model, and an aging model.
It is difficult to predict the behavior of batteries because of their non-linearity. Also, many attempts have been conducted to estimate and model the system’s inner state [
3,
4,
5]. Recently, battery modeling has been introduced using many approaches to achieve accurate SOC estimation [
6]. The model introduced in [
7] took into consideration the robustness, accuracy, and low-cost hardware requirements. It was based on the online parameter identification of an electrical model using recursive least square (RLS) with the application of an unscented Kalman filter (UKF) to estimate SOC. The model parameters used in the filter were updated by the algorithm. An improved extended Kalman filter (EFK) algorithm was introduced to estimate lithium-iron-phosphate (LiFePO
4) battery SOC [
8]. That model incorporated a second-order RC circuit with a fuzzy controller to adjust the noise variance. The results of that model showed better observable accuracy of the estimation than EKF. A third-order RC circuit model was introduced [
9] based on sampling point Kalman joint algorithm in order to SOC estimation error correction. The error was controlled within 2% and that model was better than the second-order RC circuit model.
The temperature effect under dynamic load on the LiFePO
4 battery SOC has been studied experimentally [
10]. The estimation approach was based on the RLS method, along with a model of an open-circuit voltage to SOC under different ranges of temperature. The results showed a remarkable accuracy with an error below 5.2%. Moreover, the dynamic characteristic of the LiFePO
4 battery under different rates of current was studied [
11]. The proposed model to estimate the SOC showed reduced error results. It was based on both current rates and direction. The electrochemical-thermal model introduced in [
12] was developed to simulate the temperature and voltage distribution three-dimensionally. The comparison between the predicted variables was made to validate the model accuracy. It was found that the main element for electrochemical performance improvement was the self-heating in the large-sized cells. In the recent years, advanced artificial intelligence and machine learning algorithms have been utilized in many worldwide practical applications with superior performance in diverse power system topics, e.g., [
13,
14,
15,
16,
17,
18,
19,
20] while renewables and storage systems are simulated intensively [
21,
22,
23,
24,
25]. In [
26], a single-particle model (SPM) was used to introduce a physical-chemical model of the lithium-ion battery, which governed its performance. The curves of charging and discharging were obtained for different cycle depths and current rates. The effect of the high number of cycles on the aging was introduced, as well as the electrolyte dynamics. The three-parameter method (TPM) was implemented for comparison purposes to validate the proposed model. The paper concluded that the used models had included a method to protect the battery via cutting the current in charge and discharge based on the electrode maximum stoichiometric concentration ranges of lithium. Besides, different values of the
reff parameter were used to study the direct influence on the discharge voltage.
The aging performances of different batteries including LiFePO
4 were tested and compared in [
27] through a series of start-stop micro cycles. The model introduced in [
28] was used to estimate capacity loss during cyclic aging, based on the values of different current rates using the incremental capacity analysis (ICA). The results showed a capacity reduction with aging, with a prediction error below 3.2%. Moreover, a commercial LiFePO
4/graphite type aging cycle was tested in [
29] via nineteen points, based on combinations of C-rate, temperature, depth of discharge, and SOC. SOH prediction approach was introduced in [
30] based on grey Markov chain (GMC), considering the battery internal resistance using a designed monitor device. The results showed that the model is efficient in SOH estimation. Moreover, in [
31], a SOH relative evaluation method was proposed based on the ohmic resistance. First, a dual extended Kalman filter (DEKF) was used for the ohmic resistance estimation along with the SOC. Then, the relative SOH was estimated based on the proposed method. The method was verified using a LiFePO
4 battery. An optimization technique using non-dominated sorting genetic algorithm II (NSGA-II) was introduced in [
32] to estimate the SOH. The optimizer considered both accuracy and measurement cost. The validation was done using the measurement from two LiFePO
4/C batteries, providing the grid with the primary frequency regulation (PFR) service.
A combination of SOC and SOH estimation was introduced in [
33]; a sequential algorithm to improve estimation performance was proposed. It used frequency-scale separation and estimated parameters/states sequentially by different frequencies of currents injection. The proposed algorithm was verified by experiments at different temperatures for varying battery capacities. As a combination of an electro-thermal model and a semi-empirical cycle-life model, a coupled electro-thermal-aging model was introduced in [
34], which demonstrated the system dynamics for LiFePO
4 batteries. It provided an assumption for the behaviors of the battery, which would be discussed in the section of the mathematical model, as well as an open-loop observer for both SOC and SOH.
As stated above, considerable studies have focused on the estimation problem in LiFePO4 batteries, where various approaches were investigated. Several existing approaches implement assumptions due to the complexity of the problem, such as the simplified linear models, which affect the accuracy rates and produce unreliable estimations for SOC and SOH of LiFePO4 batteries. To cover the gap in the literature, this paper proposes a reliable and robust observer, which estimates the SOC and SOH of LiFePO4 batteries in a simultaneous manner with high accuracy. To do so, comprehensive modeling of LiFePO4 batteries was achieved via an equivalent-circuit model whose input is the ambient temperature and the current, and its output was assumed to be the voltage. Furthermore, a comprehensive model was proposed, which combines three parts: a thermal model, an electrical model, and an aging model. To assure high performance of the proposed observer, the use of the dual extended Kalman filter (DEKF) is adopted for the SOC and SOH estimation of LiFePO4 batteries with current and terminal voltage sensors. A robust voltage-temperature (VT) observer and an open-loop observer were also built to provide an efficient method to monitor SOC and SOH for the battery. The system was constructed and simulated using MATLAB. Furthermore, the robustness of the proposed observer was verified by assessing its performance against ill-conditions that include wrong initial estimates and wrong model parameters. The intensive results reveal the reliability and robustness of the proposed observer for estimating both SOC and SOH of LiFePO4 batteries simultaneously, thereby ensuring safe operation for them.
The mathematical model is explained in
Section 2. The algorithms and implementation are presented in
Section 3.
Section 4 introduces the results as well as their analysis. Finally, conclusions are provided in
Section 5.
2. Mathematical Modelling
A coupled electro-thermal-aging model is the base of the analysis for LiFePO
4 batteries [
34]. The model consists of a two-state thermal model, a two RC pair electrical model, and a semi-empirical aging model. The electrical model of LiFePO
4 batteries contains an open-circuit voltage (OCV,
VOC), an ohmic resistor (
R0), and two resistor-capacitor (RC) pairs (
R1,
C1,
R2,
C2).
The state-space model is given by:
where
I(
t) is the current (positive for charging),
is the battery nominal capacity, and
Vt(
t) is the terminal voltage. Three state variables are
SOC and voltages across the two RC pairs
V1,
V2.
The identification of the electrical parameters is in [
35]. For this model, the listed equations in
Appendix A would be followed for the derivation of these parameters based on the SOC (
I < 0) or discharge (
I ≥ 0). As the core temperature could be greater than the surface one under high current rates [
35], a two-state thermal system was hereby introduced to capture both core and surface temperature dynamics. The model of the radial heat transfer dynamics of a cylindrical battery could be as follows:
Cc,
Cs,
Rc, and
Ru represent the core heat capacity, surface heat capacity, heat conduction resistance, and convection resistance, respectively.
Table 1 shows their values. The ambient temperature
Tf is treated as uncontrollable input; the two-state variables are surface temperature
Ts and core temperature
Tc.
is heat generation including energy dissipated by electrode over-potentials and joule heating. Based on Equations (3) and (4), this could be rewritten as:
The aging model is based upon a matrix of cycling tests from [
34]. Results of the experiment suggest that capacity fade depends strongly on temperature and C-rate in the cell at low charge/discharge rates while neglecting the sensitivity to depth-of-discharge. The semi-empirical life model adopted the next equation, which describes the correlation between the capacity loss (∆
Qb, in%) and the discharged ampere-hour (Ah) throughput (
A, the discharge current, depends on the rated capacity (C-rate)):
where
M(
c) is the pre-exponential factor as a function of the rated capacity, which is denoted by
c, and
is the activation energy.
R is the gas constant, which equals 8.3145 J mol
−1 K
−1.
Table 2 shows the C-rate and
M(
c) relation. The power-law factor
z and the activation energy
Ea are given by:
This model considers a capacity loss of 20% for an automotive battery as the end-of-life (EOL). The corresponding Ah throughput
Atol and the number of cycles
N are, therefore, computed as:
Each cycle corresponds to 2
charge throughput, and since
Atol is discharged Ah throughput, the total throughput including both charged and discharged Ah should be 2 ×
Atol. Based on this, the battery
SOH is defined as follows:
where the initial time is
t0.
SOH varies among [0, 1],
SOH = 1 denotes a new battery and
SOH = 0 means 20% capacity loss (EOL). The
SOH derivative produces the aging model of the battery:
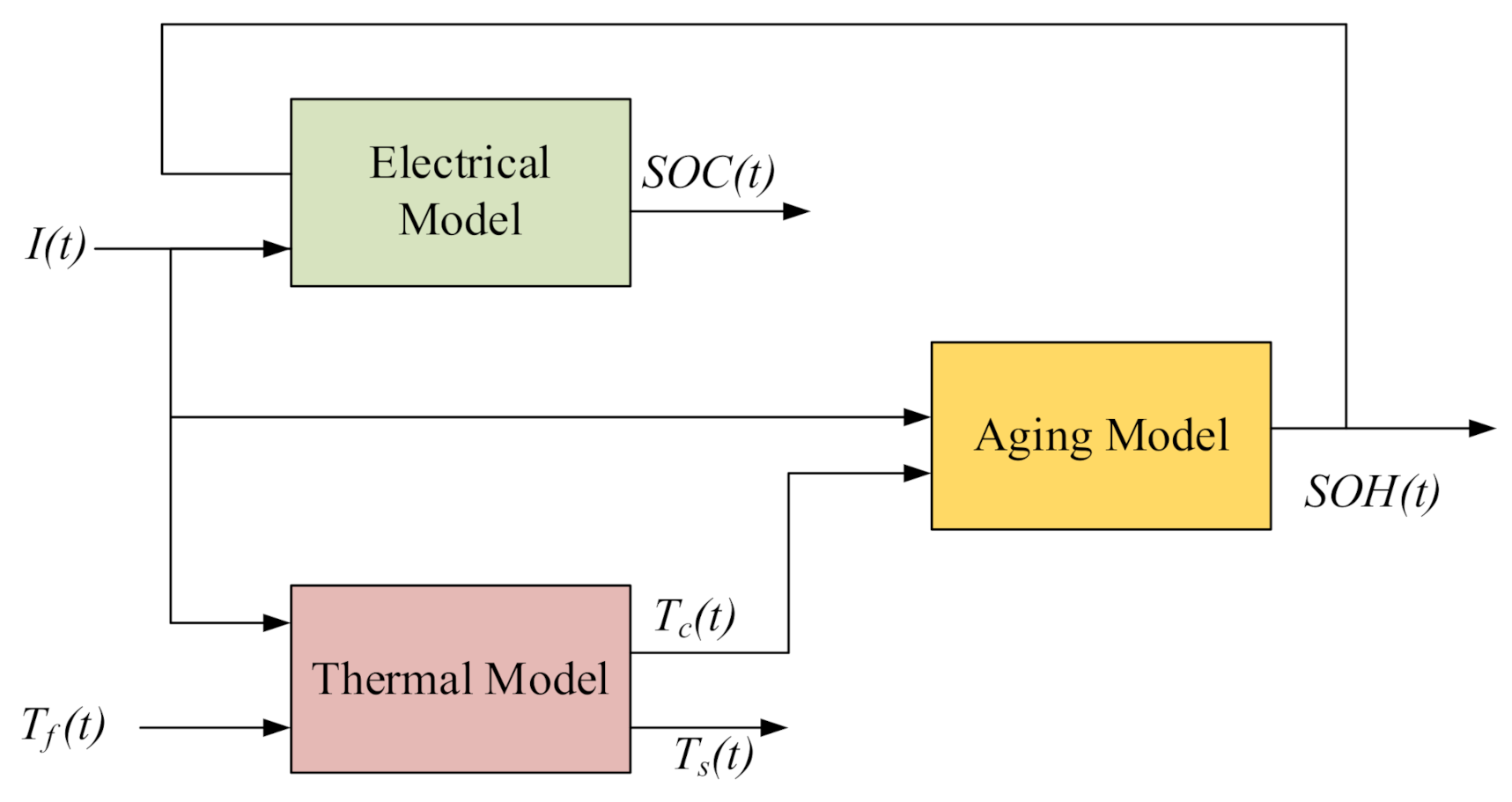
Figure 1 shows the combination of the three models. The dynamics of the model are that the inputs include the controllable current
I(
t), and the uncontrollable ambient temperature
Tf (
t).
4. Results and Discussion
In this paper, the used parameters are based on A123 LiFePO
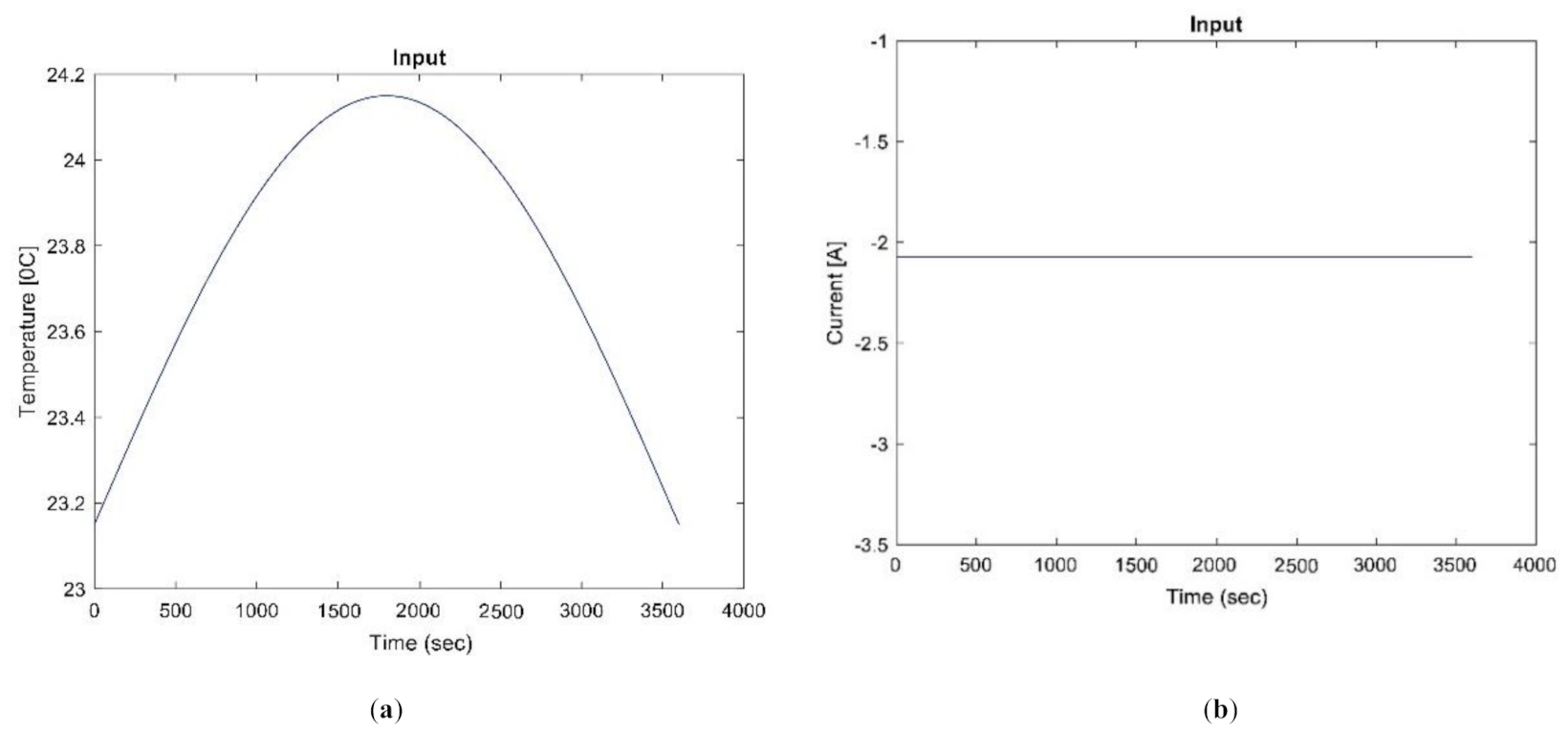
4 battery parameters. In the 1-h of simulation, the controllable input was the charging rate (=0.9 C-constant value). The uncontrollable one, ambient temperature, was assumed as a half-sine wave.
Figure 4 presents the system inputs.
For the outputs of the simulation, after 1-h charging, the SOC reached 90%. As the SOC increased, the terminal voltage increased. As time passed, SOH decreased. Surface and core temperatures of the LiFePO
4 battery changed as they are affected by the ambient temperature and the current.
Figure 5 presents these outputs.
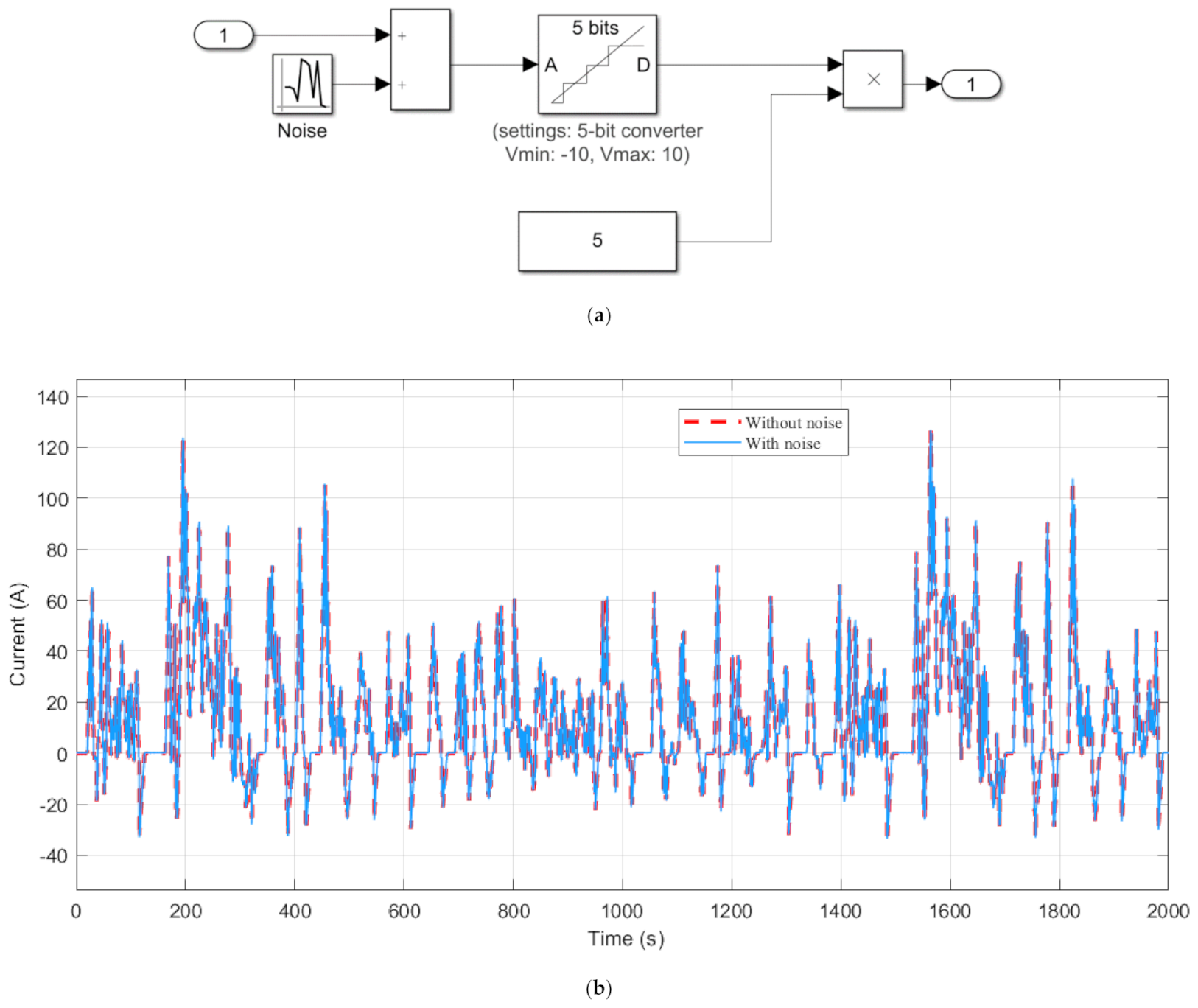
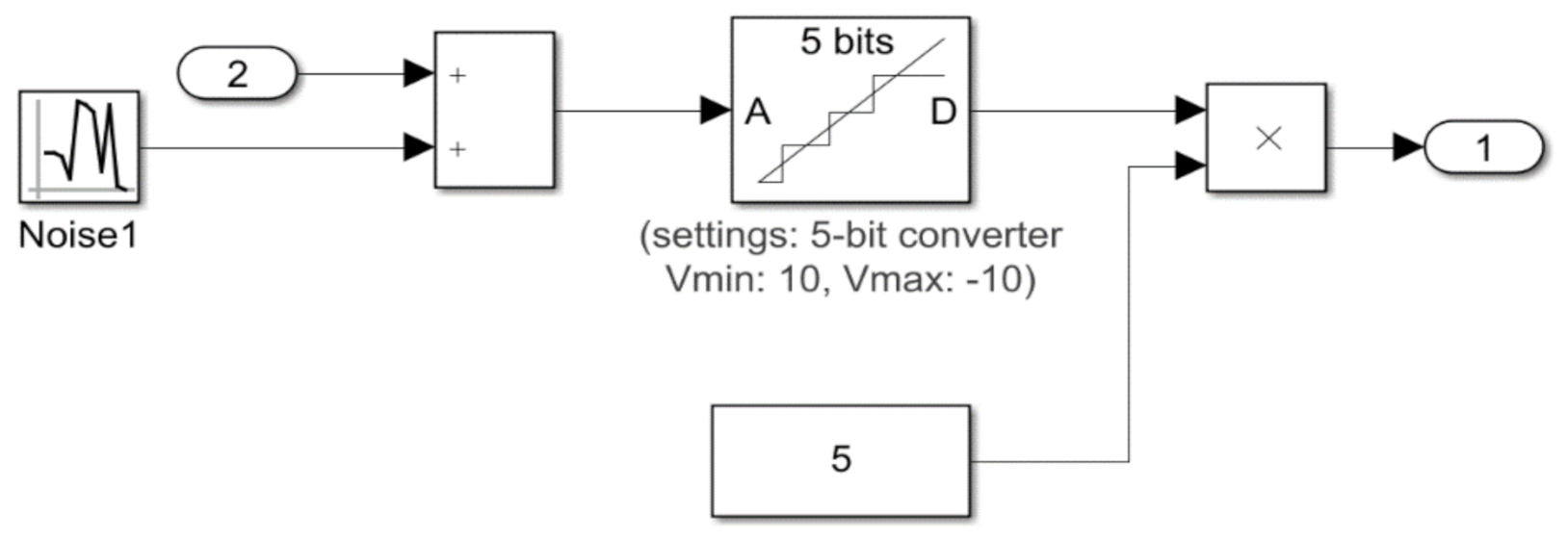
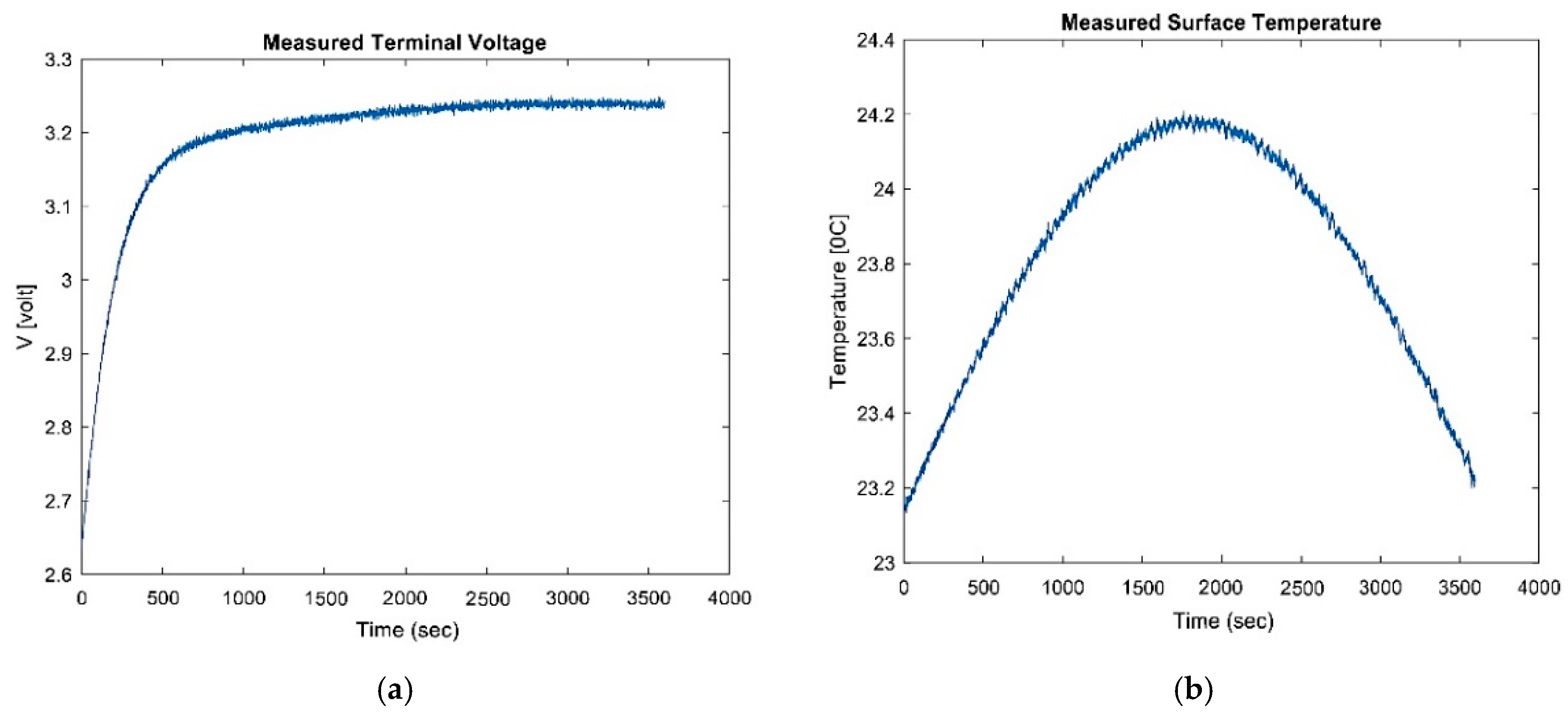
With adding white noises to both surface temperature and terminal voltage data with SNR = 60, the generated synthetic data produced surface temperature and terminal voltage measurements.
Figure 6 introduces these synthetic measurements.
By using the EKF method, three different observers were created.
Table 3 shows the three observer’s components.
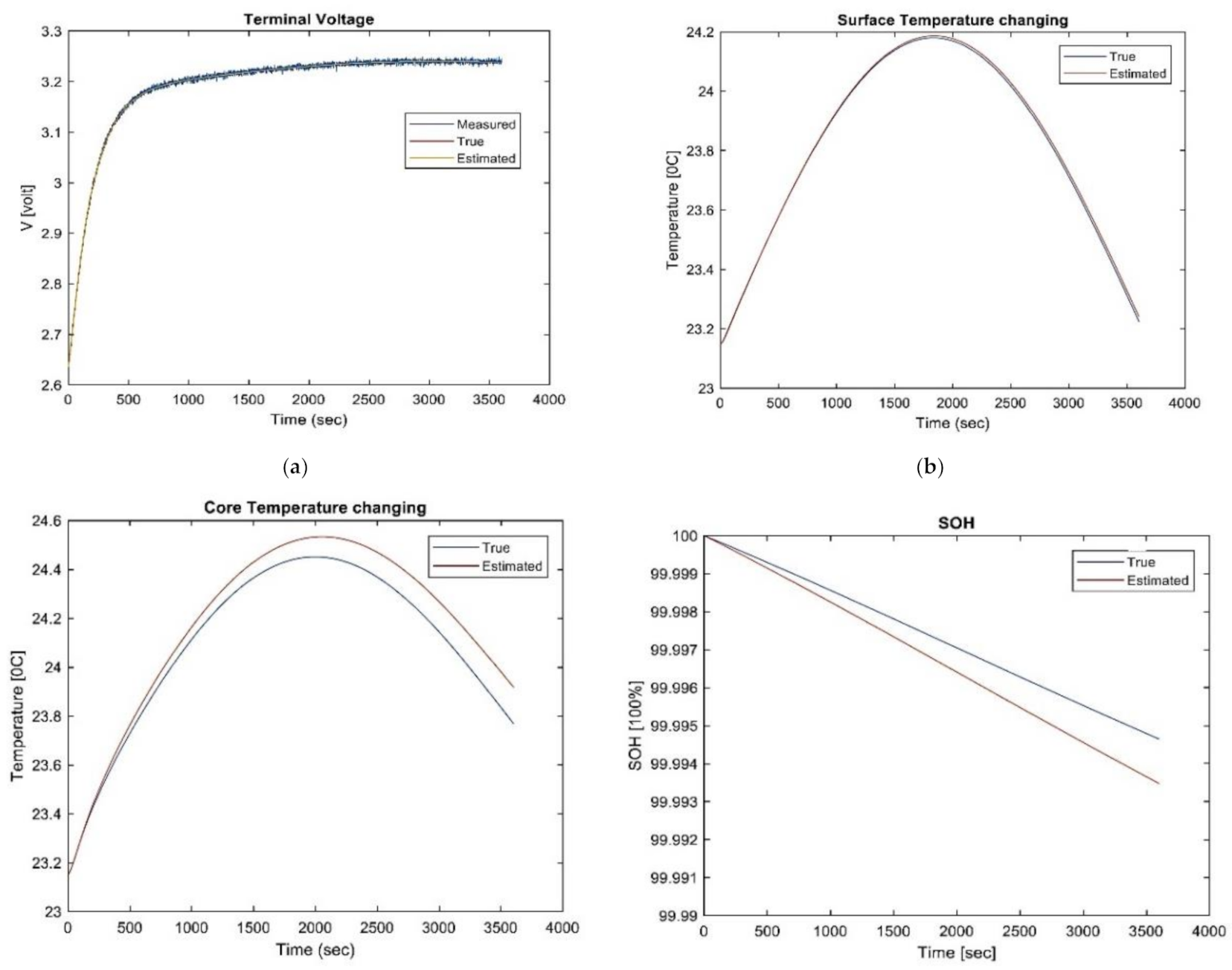
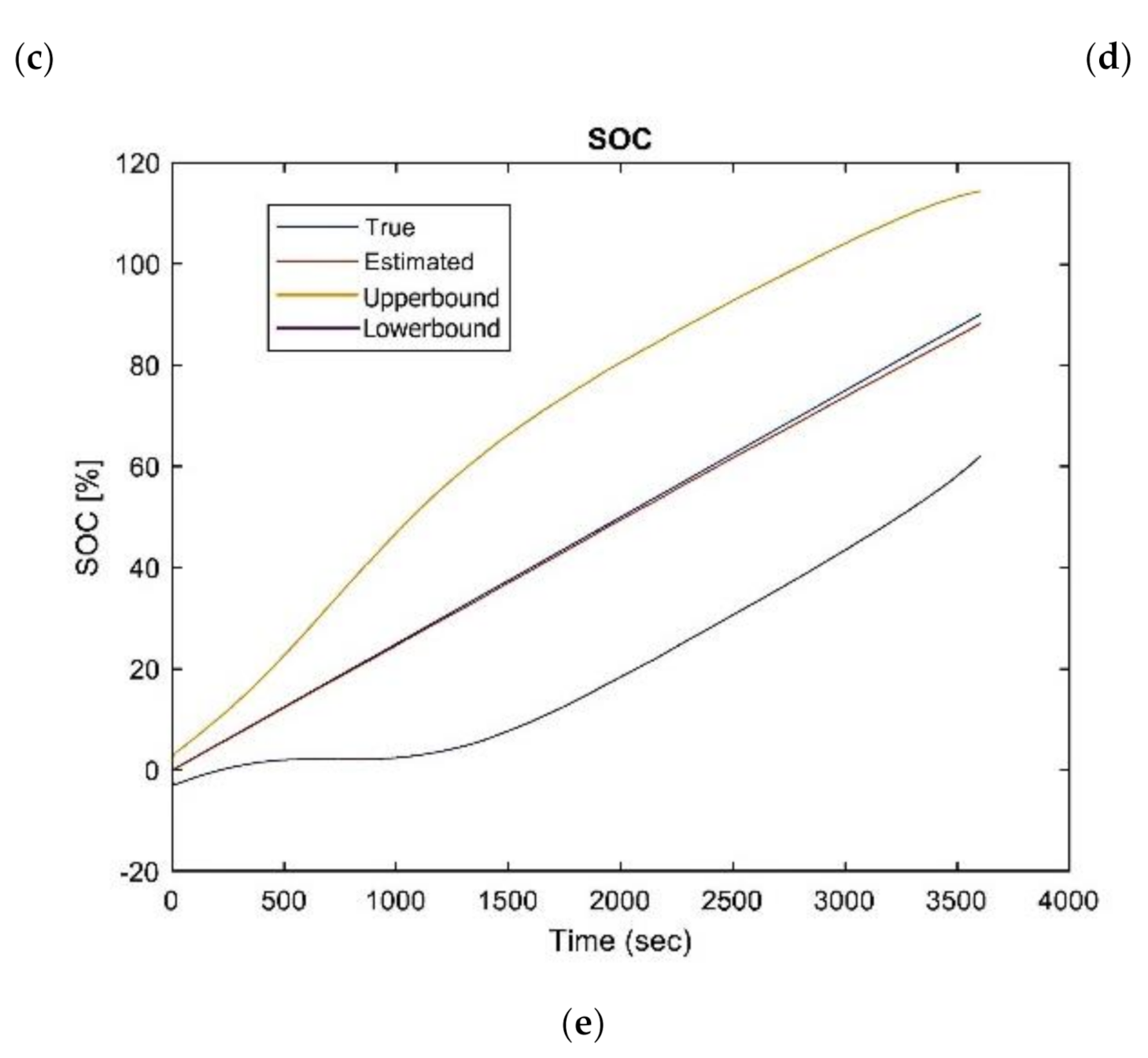
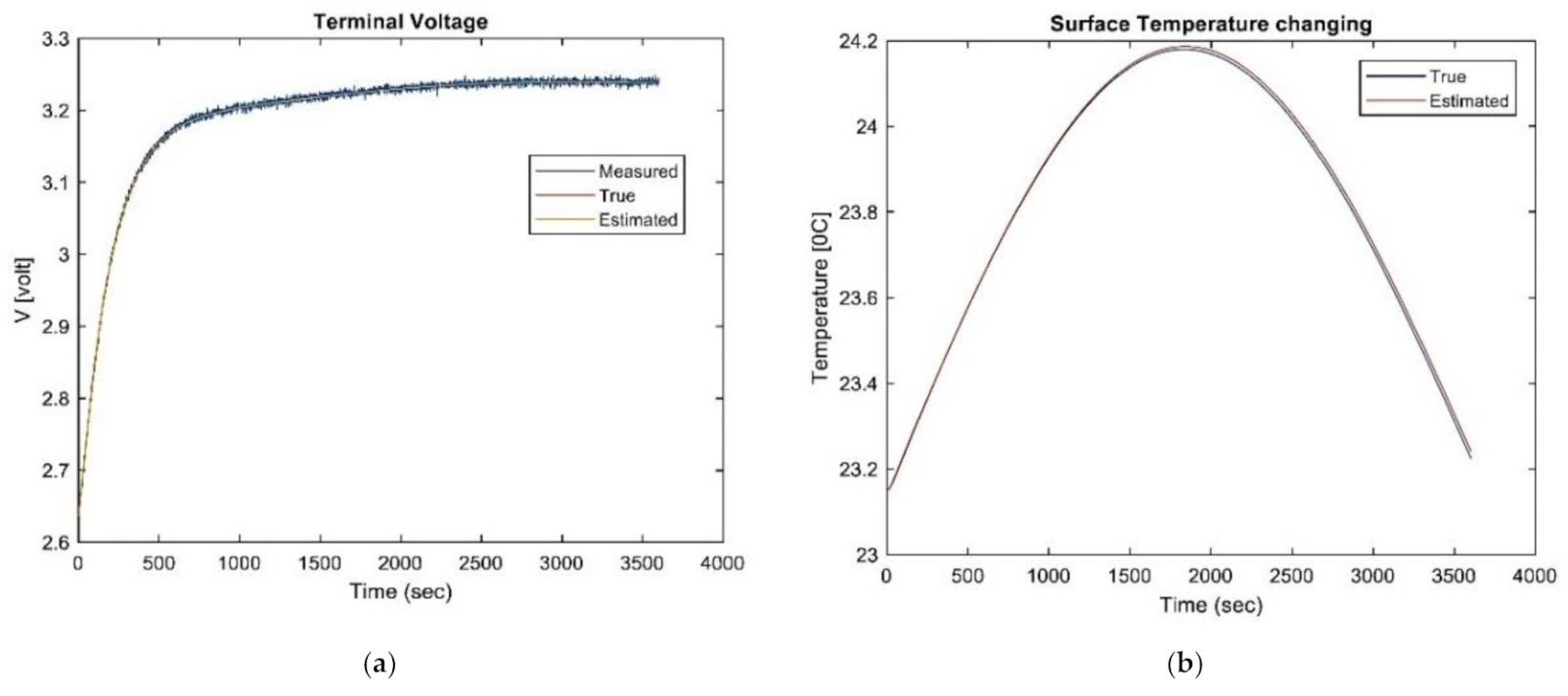
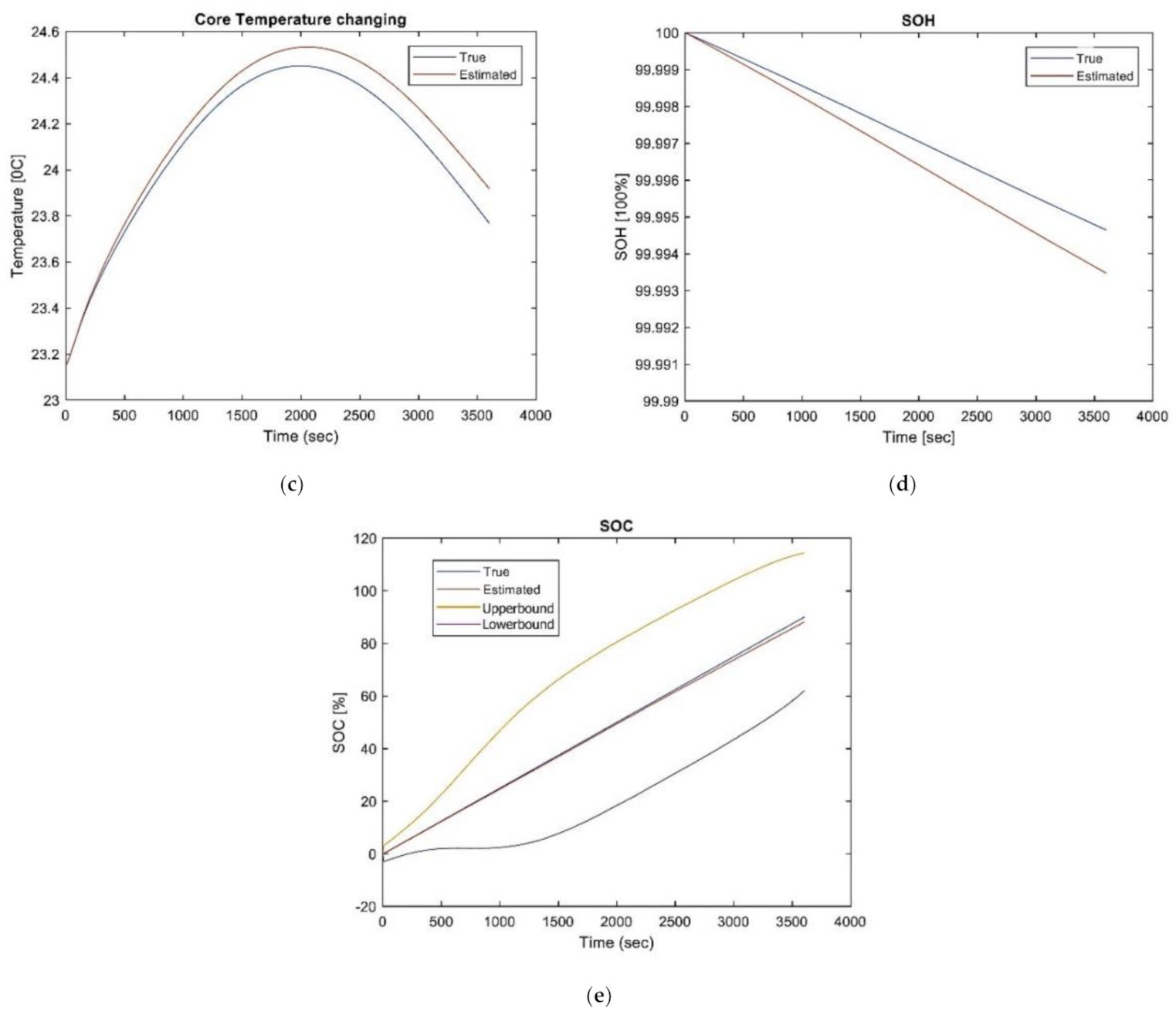
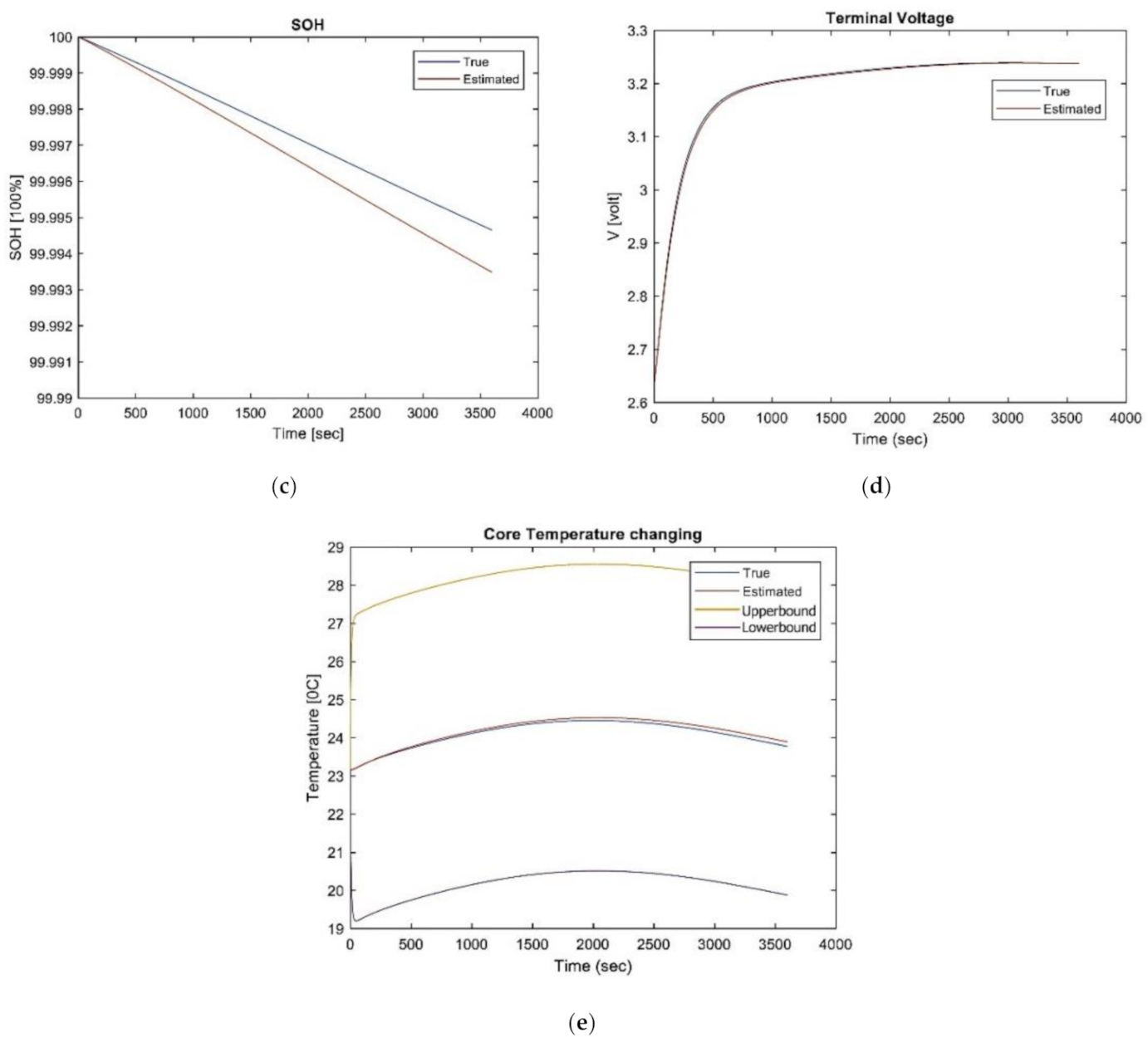
To examine the three observers’ robustness, wrong initial estimates and wrong parameter values were used, respectively. The voltage-measured observer values for that test are shown in
Figure 7 and
Figure 8, respectively. Note that these upper and lower bounds have been defined as the common bounds used in the literature.
Both terminal voltage and SOC were estimated well for the voltage-measured observer. After 1000 s, the estimated core and surface temperatures converged with their true values. However, that did not happen to the estimated SOH. That result indicated that the SOH was unobservable. The reason for that was that the observability matrix of the voltage-measured observer was not full rank. Span ([0, 0, 0, 1, 0, 0]
T, [0, 0, 0, 0, 1, 0]
T, [0, 0, 0, 0, 1]
T) is the observability matrix null space. That indicates that the
Tc,
Ts states, and SOH were unobservable. Nevertheless, when the model of the observer is accurate, the convergence of the temperatures to their true values would occur, although temperatures are unobservable for the voltage-measured observer. The reason for that is the core and surface temperatures would only reach their equilibrium states after a long time as the thermal system is asymptotically stable.
Figure 9 and
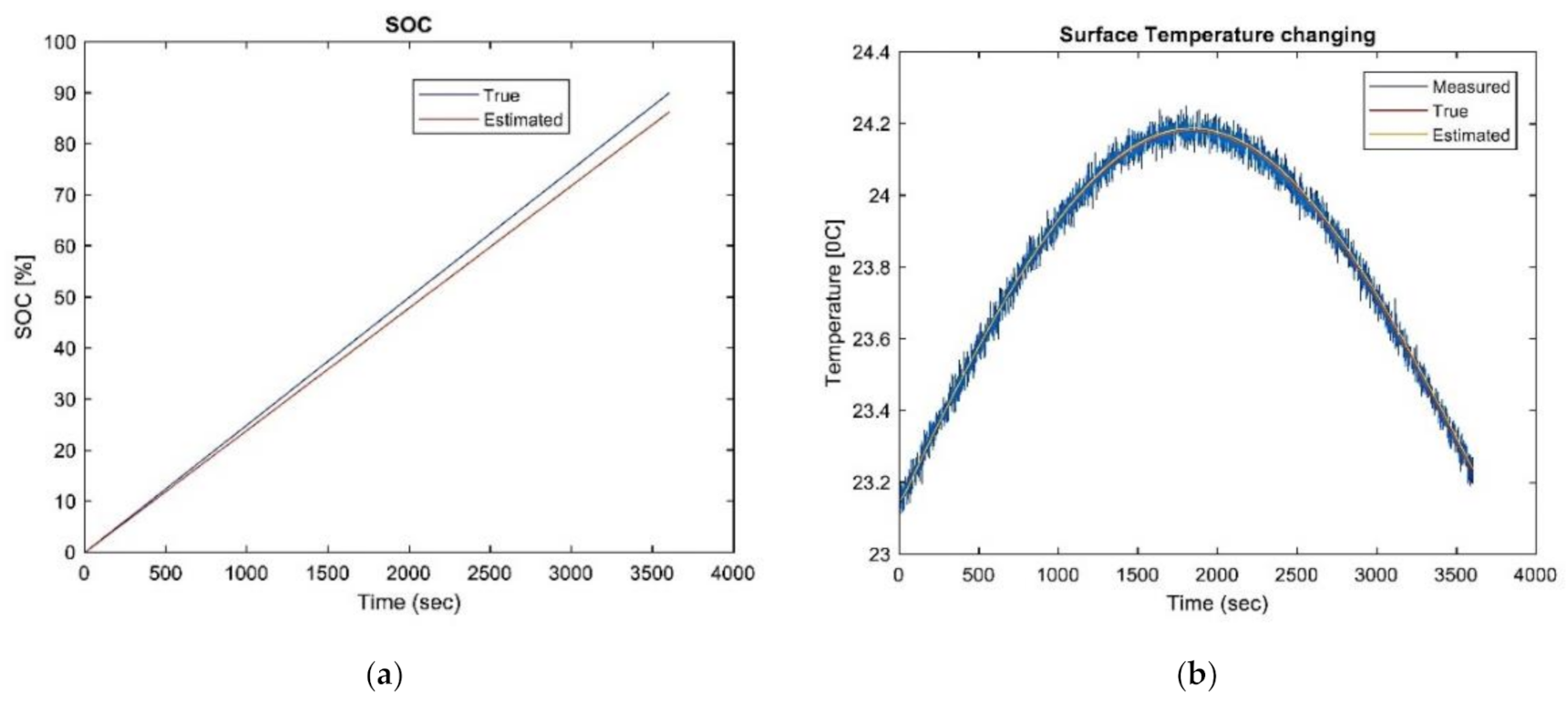
Figure 10 present temperature-measured observer estimation tests using wrong initial estimates and wrong parameter values, respectively.
For that observer, the core and surface temperatures are estimated well. The estimated SOC and SOH did not converge to their true values. The result of that test indicated that SOC and SOH were unobservable for that observer. The observability matrix rank of that observer was 4, which was not a full rank. Span ([1, 0, 0, 0, 0, 0]T, [0, 0, 0, 0, 0, 1]T) is the observability matrix null space, which indicates the unobservability of SOC and SOH for the observer as well.
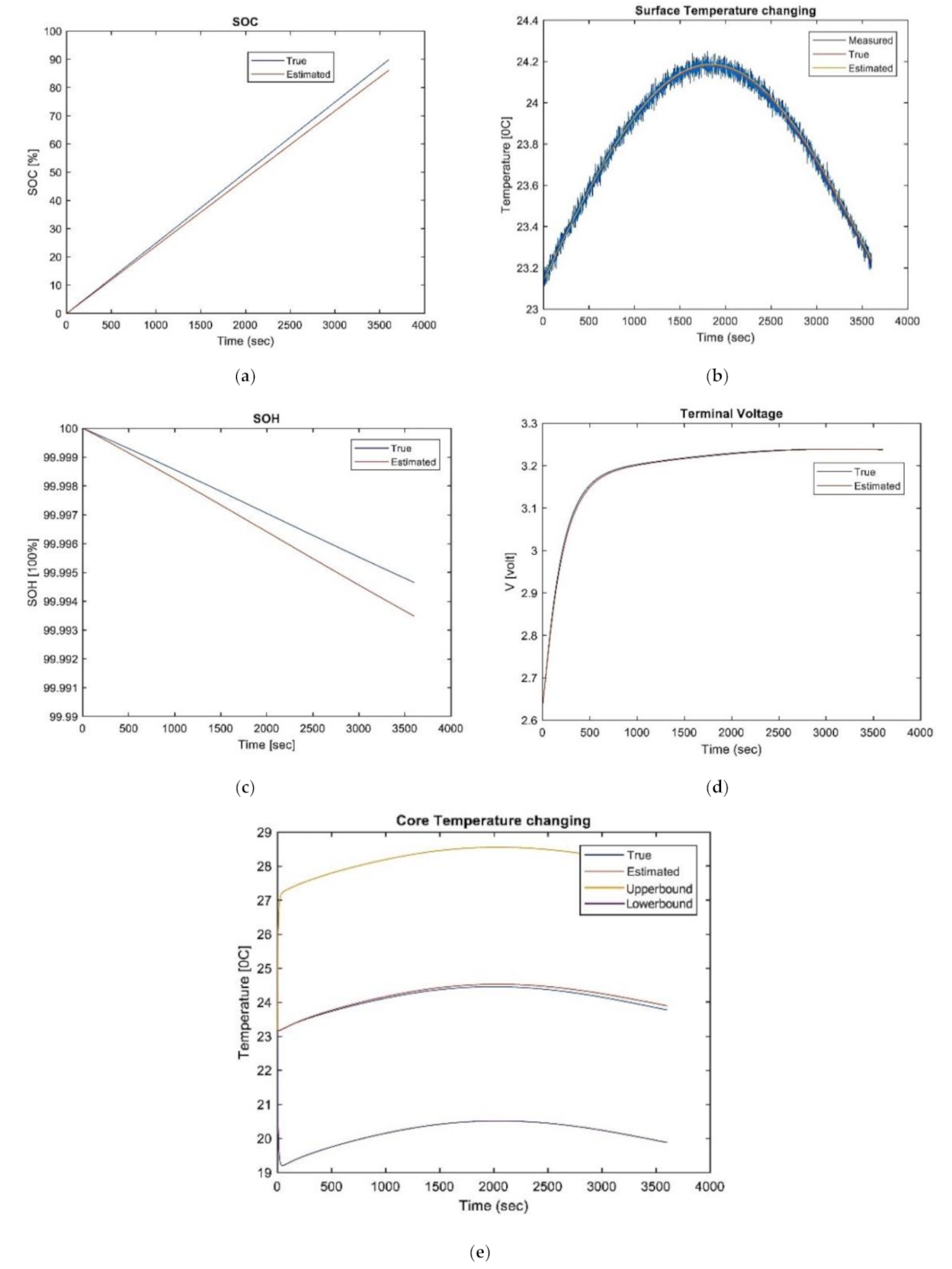
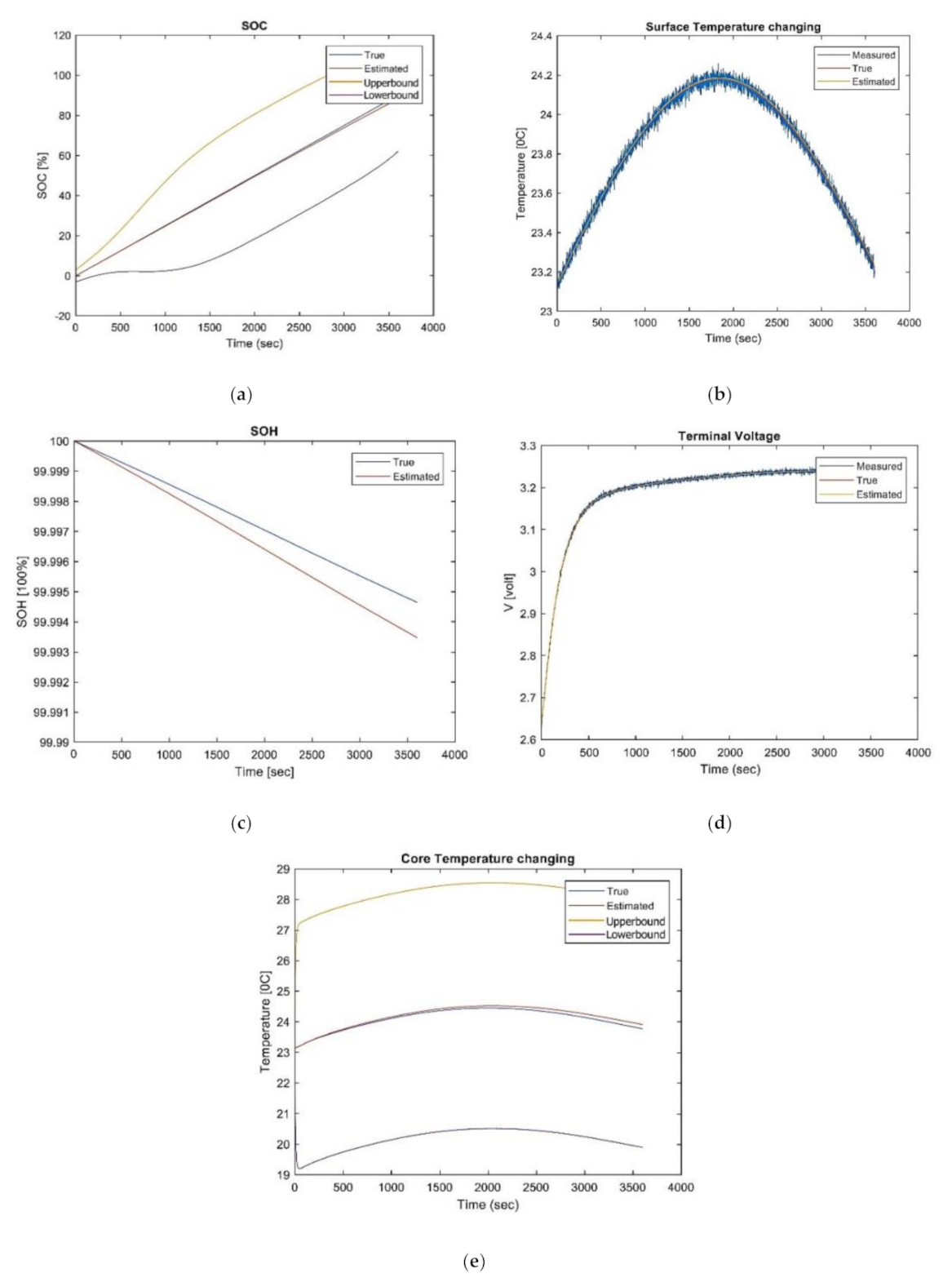
Figure 11 and
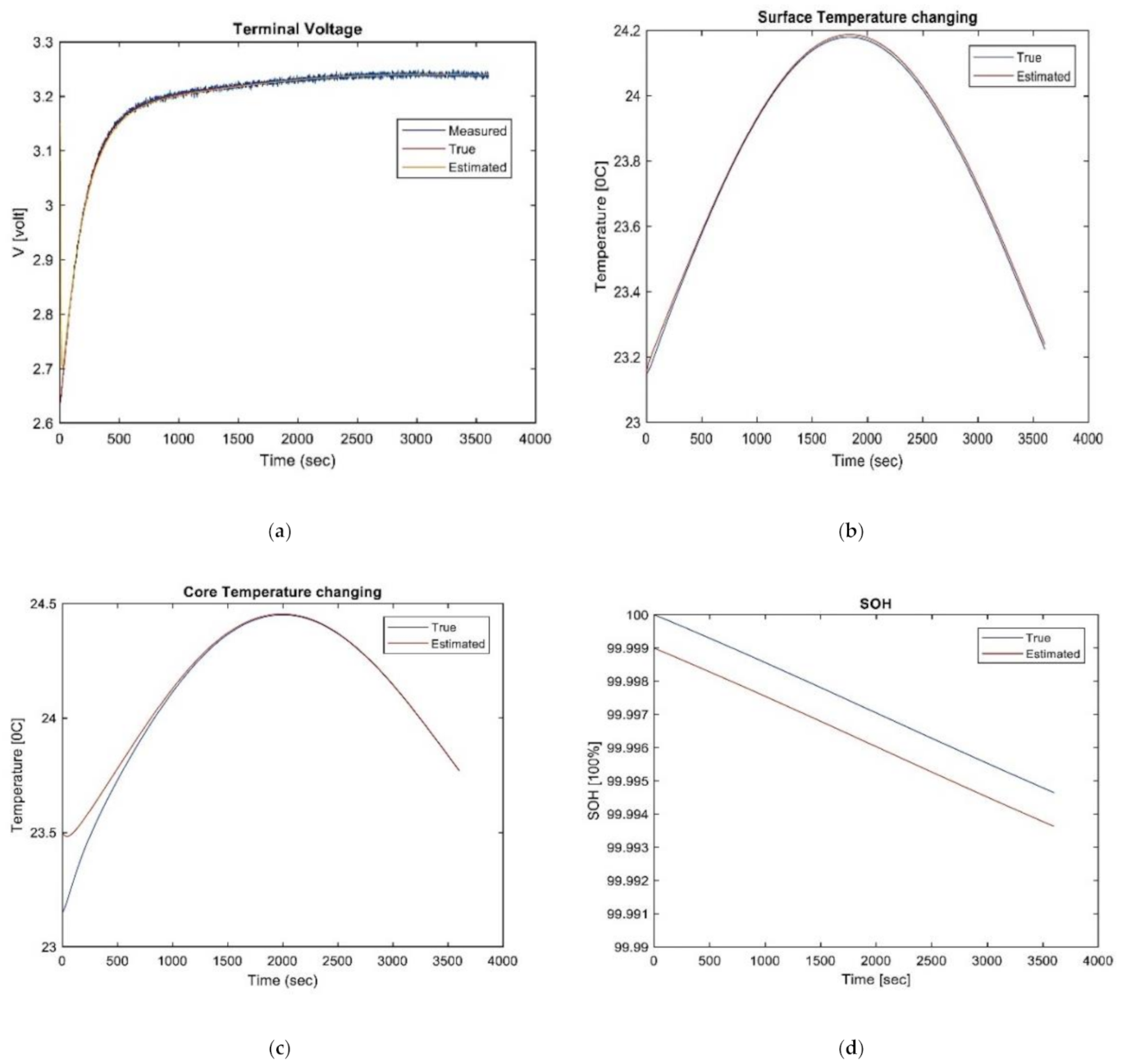
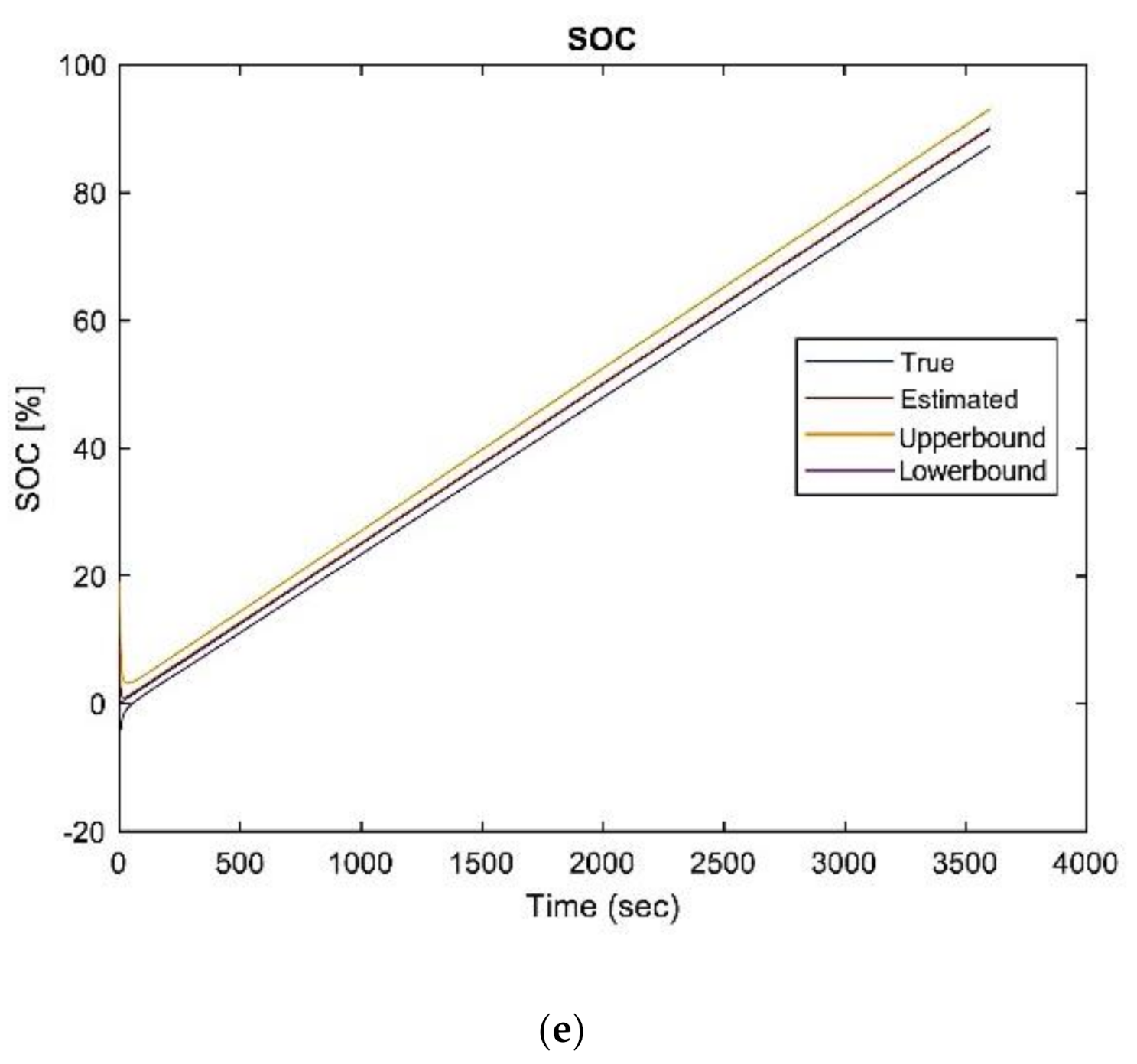
Figure 12 present the results of the estimation test for the VT-measured observer using wrong initial estimates and wrong parameter values, respectively.
For the VT-measured observer,
VT,
TC,
TS, and SOC were well estimated, except for the SOH. The observability matrix rank of that observer was 5. Span ([0, 0, 0, 0, 0, 1]
T) was the observability matrix null space, which indicated the SOH unobservability as well. For the three observers’ performance evaluation, six battery states’ observability of the observers are shown in
Table 4,
Table 5 and
Table 6, which present these three observers’ root-mean-squared error (RMSE) and two tests.
Analyzing the previous results, SOC and SOH are unobservable for temperature observers, while
TC,
TS, and SOH are unobservable for voltage observers. Nevertheless, the resistance of the circuit could affect the temperature. On the other hand, the temperature would affect the resistance as well. Therefore,
TC and
TS could be observed by an indirect approach with the voltage observer since the convergence of the temperature after a long time. That could lead to the idea that both voltage and temperature observers might be combined together as a VT-observer. Based on the results, there is an advantage for the VT-measured observer as most of the states could be estimated because it combines the two observers. It should be indicated that the SOH could not be estimated by any observer. However, the SOH values could be estimated well by an open-loop observer, provided that the model of the battery and the initial values are accurate. Additionally, based on the results, a positive linear relationship between SOC and the charging time could be noticed, while SOH has a negative one. It requires about two hours for the SOC to replenish from 0% to 90% in the simulation, with an associated SOH decay of 0.005%. The reason for running the simulation with an upper limit of 90% is to keep the health of the battery because this test will be applied many times. The lowest SOH is 99.995%, and the highest SOC is 87.4% compared to the original status. That indicates that the battery health and charging time is a tradeoff. This led to a rise in the balance between efficiency and safety. For higher efficiency, the charging time should be minimized; For the highest safety, the aging condition should be minimized. Through comparing these results with the proposed model in [
29], in real-life cases, a balanced point should be found in different scenarios, which leads to a new topic—optimal control for battery charging. Since the importance of batteries as an energy storage device, the proposed observer would definitely advance sustainability. Therefore, the importance of the estimation of the states in energy systems could be noticed.



 ,
, 

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}















