
A MLP-Hedge-Algebras Admittance Controller for Physical Human–Robot Interaction


1
Department of Electrical and Information Engineering, Seoul National University of Science and Technology, Seoul 01811, Korea
2
School of Mechanical Engineering, Hanoi University of Science and Technology, Hanoi 10000, Vietnam
*
Authors to whom correspondence should be addressed.
Appl. Sci. 2021, 11(12), 5459; https://doi.org/10.3390/app11125459
Submission received: 2 March 2021
/
Revised: 13 April 2021
/
Accepted: 21 April 2021
/
Published: 12 June 2021
(This article belongs to the Section Robotics and Automation)
Abstract
:Featured Application
Potential applications of this research include: (a) the operator teaches the manipulator to implement complicated tasks, such as welding, whose purpose is to eliminate the path planning, or (b) the manipulator supports the operator to lift heavy objects up and down.
Abstract
Recently, the identification of inertia and damping matrices (IIDM) and safety issues, as well as natural cooperation, are interestingly considered to enhance the quality of the physical human–robot interaction (pHRI). To cover all of these issues, advanced admittance controllers, such as those based on fuzzy logic or hedge algebras, have been formulated and successfully applied in several industrial problems. However, the inference mechanism of those kinds of controllers causes the discreteness of the super surface describing the input–output relationship in the Cartesian coordinates. As a consequence, the quality of the safe-natural cooperation between humans and robots is negatively affected. This paper presents an alternative admittance controller for pHRI by using a combination of hedge algebras and multilayer perceptron neural network (MLP), whose purpose is to create a more accurate inference mechanism for the admittance controller. To our best knowledge, this is the first time that such a neural network is considered for the inference mechanism of hedge algebras and also the first time that such an admittance controller is used for pHRI. The proposed admittance controller is verified on a teaching task using a 6-DOF manipulator. Experimental results have shown that the proposed method provides better cooperation compared with previous methods.
1. Introduction
The safe, natural pHRI can be considered an efficient solution for enhancing flexibility and reducing human labor in industrial processes. For example: (a) the operator teaches the manipulator to implement complicated tasks, such as welding, whose purpose is to eliminate the path planning, or (b) the manipulator supports the operator to lift heavy objects up and down. The quality of pHRI depends on three issues: identifying inertia and damping matrices (IIDM), safety, and natural cooperation. To date, almost all studies have concentrated on the safety issue, while the IIDM is still an open problem since this work cannot be obtained analytically and is usually time-consuming. Moreover, the natural human–robot interaction is rarely of concern, yet it is crucial to obtain effective cooperation. These shortcomings can be found in previous studies on pHRI, such as [1,2,3,4,5,6,7], and are presented clearly in [8,9,10]. By contrast, the natural human–robot cooperation is considered elaborately for non-physical interactions, as presented in [11,12].
By the human-like inference mechanism, fuzzy logic has been researched and applied successfully to many engineering problems [13,14,15,16,17,18,19,20,21,22]. To construct fuzzy-based controllers, the following scheme, including five main tasks, should be conducted: (1) determining inputs and outputs of control systems based on requirements of engineering tasks, (2) defining the membership function to fuzzify inputs and outputs, in which the physical domains of linguistic variables, the number of linguistic values, and the sub-physical-domain of each linguistic value should be defined suitably, (3) identifying the fuzzy rule base, demonstrating the relationship among inputs and outputs, (4) choosing the composition of fuzzy relations to infer the outputs’ fuzziness, (5) finally, the defuzzification must be conducted to map the fuzziness values of outputs to their physical values. This observation encouraged authors in [8,9] to use the fuzzy logic to eliminate the IIDM during the controller-making process, in which the end-effector’s velocity is adaptively adjusted by applied force/torque and power transmitted by the robot. Moreover, the safety issue is guaranteed by using ISO10218 safety standard, and the natural human–robot interaction was also presented in [9]. Unfortunately, the inference mechanism of the fuzzy logic cannot adequately simulate human language in nature since there is no formalized linkage of fuzzy sets with the natural linguistic term semantics. Moreover, the fuzzy base is formulated incoherently, based on membership functions, the composition of fuzzy relations, and defuzzification, which may also lead to errors during the data process.
In contrast, hedge algebras (HA) were proposed as an algebraic approach to the natural structure of semantic domains of linguistic variables in which linguistic values construct the semantic constraints to help linguistic terms avoid transfiguration during data handling. Furthermore, the fuzzy rule base is identified as a mathematical model using an HA-term transformation and semantically quantifying mappings (SQMs). Herein, SQMs of hedge algebras are functions used to calculate the semantic values of HA-terms based on the fuzziness measure. As a result, the fuzzy rule base can be defined as a real grid surface in Cartesian coordinates in which one fuzzy clause can be defined as a point in the Cartesian product of suitable hedge algebras. These properties enable HA to solve engineering problems effectively and are analyzed clearly in [23,24,25,26,27,28,29,30,31,32,33]. This analysis motivated authors in [10] to propose an admittance controller by using hedge algebras to discover the inherent order-based structures of the terms and term domains of linguistic variables. This approach also gives favorable conditions to reduce the complexity during the controller-making process by eliminating the membership functions, the composition of fuzzy relations and de-normalization. Normally, the product operator and average operator are used to transforming the real grid super surface in 3D space to a curve in 2D space, whose purpose is to simplify the semantic relationship between inputs and outputs before using the interpolation method. The horizontal axis of the 2D coordinates is the integration of semantics of inputs, and the vertical axis is semantic of outputs. However, these methods distort the input–output relationship and cause a loss in the data processing. To this end, four-point bilinear interpolation was used for the semantic relationship [10]. This method divides the super surface into small linear surfaces, which are bounded by four points in the 3D space. A small linear surface will be chosen to interpolate the semantics of the output if inputs are inside the corresponding surface’s boundary. Four-point bilinear interpolation helps to improve the accuracy of HA inference by using the product operator and average operator. Unfortunately, this method still cannot adequately reflect the real super surface since the input–output semantic relationship is nonlinear. By using four-point bilinear interpolation, the super surface will be discrete. This affects the accuracy of the admittance controller and the smoothness of the interaction between humans and robots. Moreover, this interpolation method is difficult to be applied if the number of the input of the control system is more than two ones.
Currently, artificial intelligence is an attractive research topic. Classes of networks such as multilayer perceptron networks (MLPs), convolutional neural networks (CNNs), and recurrent neural networks (RNNs) provide much flexibility and have proven themselves over decades to be useful and reliable in various areas [34,35,36,37,38,39,40,41,42]. RNNs were designed to work with sequence prediction problems, which are traditionally difficult to train and not appropriate for tabular datasets. CNNs were designed to map image data to an output variable, developing an internal representation of a two-dimensional image. More generally, CNNs work well with data that has a spatial relationship. On the contrary, MLPs are suitable for classification prediction problems where inputs are assigned a class or label or regression prediction problems where a real-valued quantity is predicted given a set of inputs. Data is often provided in a tabular, such as in a comma-separated value file or a spreadsheet. MLP network class is very flexible and can be used generally to learn mapping from inputs to outputs. Interestingly, the semantic input–output relationship in the HA is a tabular type, which demonstrates the predefined policy of engineering systems. Moreover, the studies based on the theorems of Kolmogorov, for example, [43,44,45], have pointed out that all of the continuous mappings from [0, 1]p to [0, 1]n can be approximated by a multilayer perceptron network of which input layer includes p neurons, output layer includes n neurons and hidden layers include (2p + 1) neurons. Coincidentally, semantic values of all linguistic variables in the HA always belong to [0, 1]. In other words, the interpolation method for the input–output semantic relationship in the HA can be considered as a mapping from [0, 1]p to [0, 1]n. Therefore, the MLP network is believed to become an efficient method for the input–output semantic relationship in the HA. In this paper, the MLP neural network is proposed for the semantic interpolation issue in hedge algebras to describe the relationship between inputs and output adequately. Semantic values of output will be interpolated in the global boundary of the real super surface, and therefore, the accuracy of the admittance controller is improved. To our best knowledge, a multilayer perceptron hedge algebras-based controller (MLP-HA-based controller) is first introduced, especially in robotics. Main contributions of this paper: (1) a new approach for the semantic relationship in hedge algebras is proposed by using a multilayer perceptron neural network (MLP). Existing methods for the input–output semantic relationship are product, average or four-point bilinear. However, product and average operators distort the input–output semantic relationship. The Four-Point-Bilinear makes the semantic relationship discretely. Moreover, those methods are difficult to be applied if the number of the input of the system is more than two ones. By contrast, the MLP network represents the super surface describing the input–output semantic relationship more accurately and smoothly. Semantic values of output will be interpolated in the global boundary of the real super surface. The MLP network also gives favorable conditions to deal with multi-input systems. (2) the combination of hedge algebras and multilayer perceptron neural network is considered for pHRI to eliminate the identification of inertia and damping matrices in the dynamic admittance model. Moreover, the safety issue and the natural cooperation are also covered.
The rest of this paper is organized as follows: In Section 2, a fuzzy-based admittance controller for safe, natural human–robot interaction is briefly presented, using constraints of ISO10218 safety standard. In Section 3, the HA-admittance controller with the four-point bilinear and the proposed MLP-HA-based admittance controller are formulated. Next, stability is considered in Section 4. After this, the proposed MLP-HA-based admittance controller is verified by a teaching task, which uses a 6-DOF manipulator. The last section presents the conclusion of the research work.
2. Fuzzy-Based Admittance Controller
This section presents an admittance controller based on the inference mechanism of fuzzy logic, in which the velocity of the end-effector will be adjusted directly via the external wrench and the transmitted power without the IIDM. To guarantee safety, constraints of ISO10218 standards are considered to formulate the controller:
Here, F and M are external force/torque, and . V and W are linear and angular velocities of the end-effector. FM, VM and PM are the maximum external force, linear velocity, and transmitted power allowed, respectively. is the measured velocity. is the rotation matrix between the TCP (tool center point) frame and the base frame, and L is the length of the tool in the TCP frame. In the sequel, it denotes the Euclidean norm of a vector u and represents the dot product of vectors u and v.
To eliminate the IIDM, the fuzzy-based admittance controller is designed based on constraints Equations (1)–(3) of the safety standard, without the dynamic admittance model. FM, VM, and PM are used to determine physical domains demonstrating linguistic variables. The output is the velocity of the end-effector, including V and W. The inputs are the external force F, external torque M and the transmitted power P. Based on Equations (1)–(3), it is clear that |F|, |M|, |V|, |W|, and P are used during data processing. Based on [46], the five triangular type membership function is used to describe |F|, |M|, |V|, |W|, and P by linguistic values, and their physical domains are [0, FM], [0, FML], [0, VM], [0, ], and [0, PM], respectively.
In the ISO10218 safety standard, FM and VM are two main constraints, which should be considered. Other allowed parameters PM, MM, and WM should be obtained based on Equations (1) and (2). Normally, these parameters must be chosen following the safety requirements of specific technological processes. In other words, these parameters are flexible, and the control rule-base should generate the output adaptively depending on different values of safety constraints. In this paper, the rule-based admittance controller adapts all values of desired user safety constraints since physical subdomains of linguistic values are adaptively adjusted based on their predefined proportion in the linguistic variables. This mechanism is available for all of the controllers in this paper, including fuzzy-based admittance controllers and hedge-algebra-based admittance controllers. However, it is noticed that the human effort will be proportional to δ (here, δ =).
The fuzzy rule base in Table 1 presents the relationship between |V|, |F| and P, where |V| is inferred based on |F| and P. Then, |W| is inferred via|V| and |M| using the fuzzy rule base in Table 2. Here, Z, S, M, QB and B stand for zero, small, medium, quite big, and big, respectively.
The max–min composition is used to infer the fuzziness of outputs based on the fuzzy relations. This composition is defined by Equations (4) and (5) as follows:
Based on [47], the centroid defuzzification is chosen to map the fuzziness values to the desired physical values. The physical values of outputs are identified by using Equation (6).
3. Hedge-Algebras-Based Admittance Controllers
3.1. HA-Based Admittance Controller with Four Point Bilinear Interpolation
In Section 2, a fuzzy-based admittance controller is formulated using constraints of the ISO10218 safety standard. As mentioned, to overcome shortcomings of fuzzy logic, an algebraic approach to linguistic hedges in fuzzy logic will be presented. First, each linguistic variable (|F|, |M|, |V| and |W|) is considered as an HA, [10], [23,24,25,26,27]. Here, X consists of all HA terms of a linguistic variable, is an order relation on X, G = {c−, c+} is a set of generators, with , C = {0, W, 1} is the set of fixed points, where 0, 1 and W stand for the least, the greatest and the neutral term, respectively. , where is a set of unary operations representing linguistic hedges of X in which and stand for the set of negative and positive hedges, respectively; where q is the number of negative hedges, and p is the number of positive hedges.
In general, the HA of linguistic variables of inputs and output can be facultative. However, to perform the input–output relationship in a unified form, similar sets G, C, and HI are used for all HA of inputs and output of this admittance controller and chosen as follows:
- , where c− = I, and c+ = C, stand for inconsiderable and considerable, respectively;
- ,where 0, W, and 1 are fixed points, known, respectively, as the least, the medium and the greatest terms of the determined HA;
- , where h- = Q; h+ = E, stand for quite and extremely, respectively.
Based on G and H, the whole term-set X of every HA of linguistic variables in the linearly ordered relation is created . Then, the fuzzy-terms of |F|, |M|, |V| and |W| are converted into HA-terms based on a term-transformation as presented in Table 3. Next, the fuzzy rule base for |V| and |W| in Table 1 and Table 2 are transformed into the HA rule base as presented in Table 4 and Table 5. As mentioned before, the semantics of HA-terms belong to the domain [0, 1], and therefore, the points 0 and 1 are used in the HA rule base as semantic bounds for interpolation methods and to avoid the loss of the data during processing.
The rule base of the HA controller is formulated as in Table 4 and Table 5. Unlike fuzzy inference mechanisms, those rule bases are considered as super surfaces in the Cartesian coordinate by using an algebraic approach. Here, fuzziness measure and semantically quantifying mapping (SQMs) are used to convert Table 4 and Table 5 into semantic relationships. From now on, fm(x) is used to denote the fuzziness measure of x and fm(x) always belongs to [0, 1]. In addition, υ(x) is used to denote SQMs: x→ [0, 1]. Key features of fm(x) and υ(x) are briefly presented:
where is the mth-suffix of x, and μ(h) is commonly called the fuzziness parameters of X.
where
and with α, β > 0 and α + β = 1.
Sgn is the sign function of hedges and terms. and as c+ and c- possess the positive tendency and the negative tendency, respectively.
As G uniquely consists of two primary terms I and C, and the effect of I and C on Q and E of H to create HA-terms are similar, the fuzziness of the primary terms and hedges are measured through Equation (7) to Equation (14) as: and . Moreover, H just includes two linguistic hedges, and therefore, we have q = 1 and p = 1.
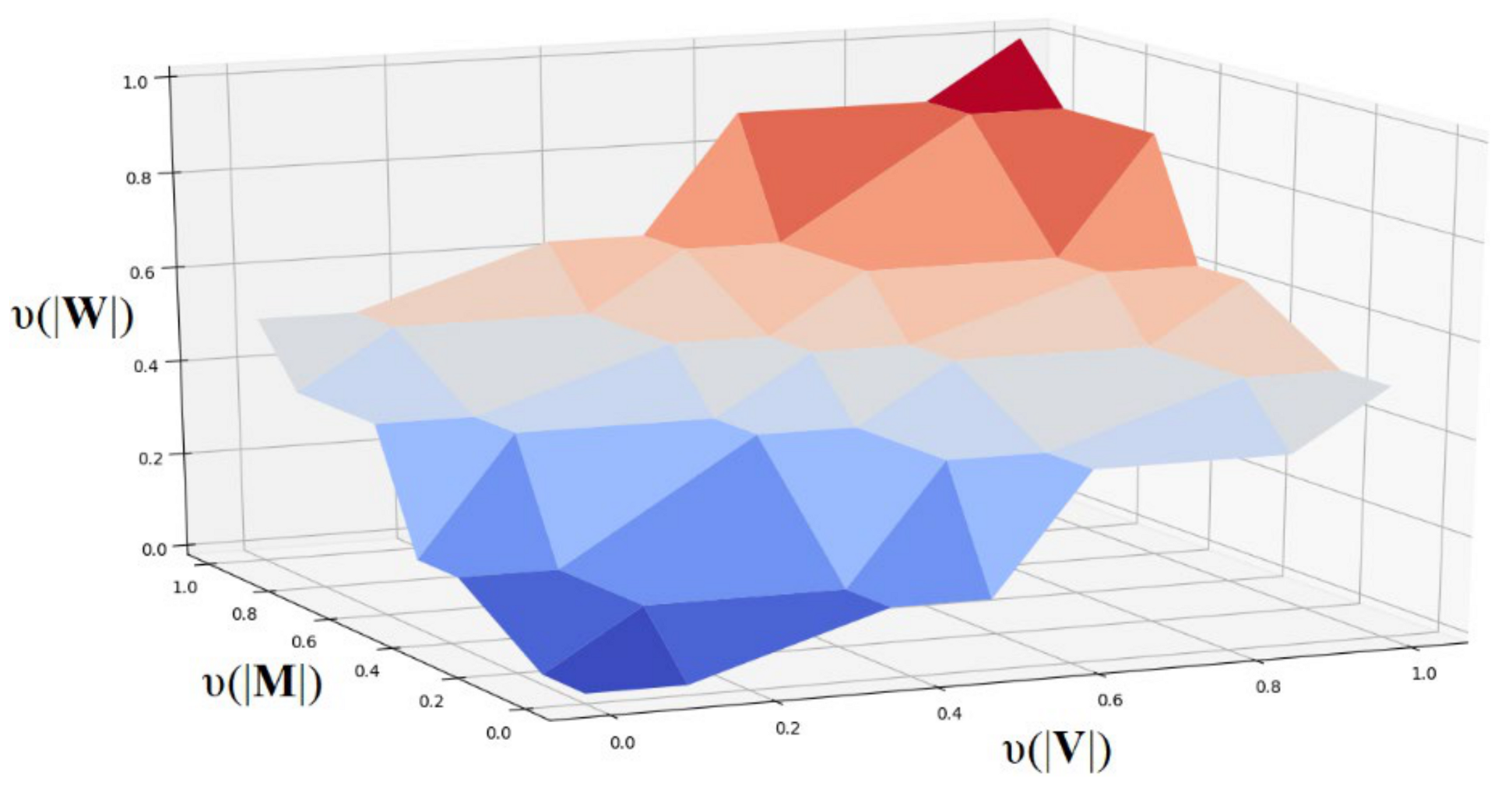
Now, based on Equations (15)–(20), the HA rule base of |V| and of |W| in Table 4 and Table 5 are transformed into the semantic relationships as presented in Table 6 and Table 7. The semantic relationship between |F|, P, and |V| in Table 6 defines the super surface in Euclidean space, as shown in Figure 1. The semantic relationship between |M|, |V|, and |W| in Table 7 defines the super surface in the Euclidean space, as shown in Figure 2. Super surfaces in Figure 1 and Figure 2 are obtained from the linearization of Table 6 and Table 7 by using the four-point bilinear method.
Finally, the four-point-bilinear interpolation [48] is used to approximate the semantic values of |V| and of |W| through the semantic relationships among inputs and outputs in Table 6 and Table 7. The inference mechanism of four-point bilinear interpolation is briefly presented by Figure 3 and Equations (21)–(23). As presented above, the HA-based admittance controller consists of two inputs and one output. Now, semantic values of inputs are denoted by a and b, the semantic value of output is denoted by z. The small linear surface bounded by {Q11, Q12, Q21, Q22} will be chosen to approximate the semantic value of output if a belongs to [a1, a2] and b belongs to [b1, b2]. Here, Q11 = (a1, b1, z11), Q12 = (a1, b2, z12), Q21 = (a2, b1, z21), and Q22 = (a2, b2, z22):
Until now, only semantic values of outputs |V| and |W| are known. To receive their real physical values, their term semantics are mapped from [0, 1] to their individual physical domains.
3.2. MLP-HA-Based Admittance Controller
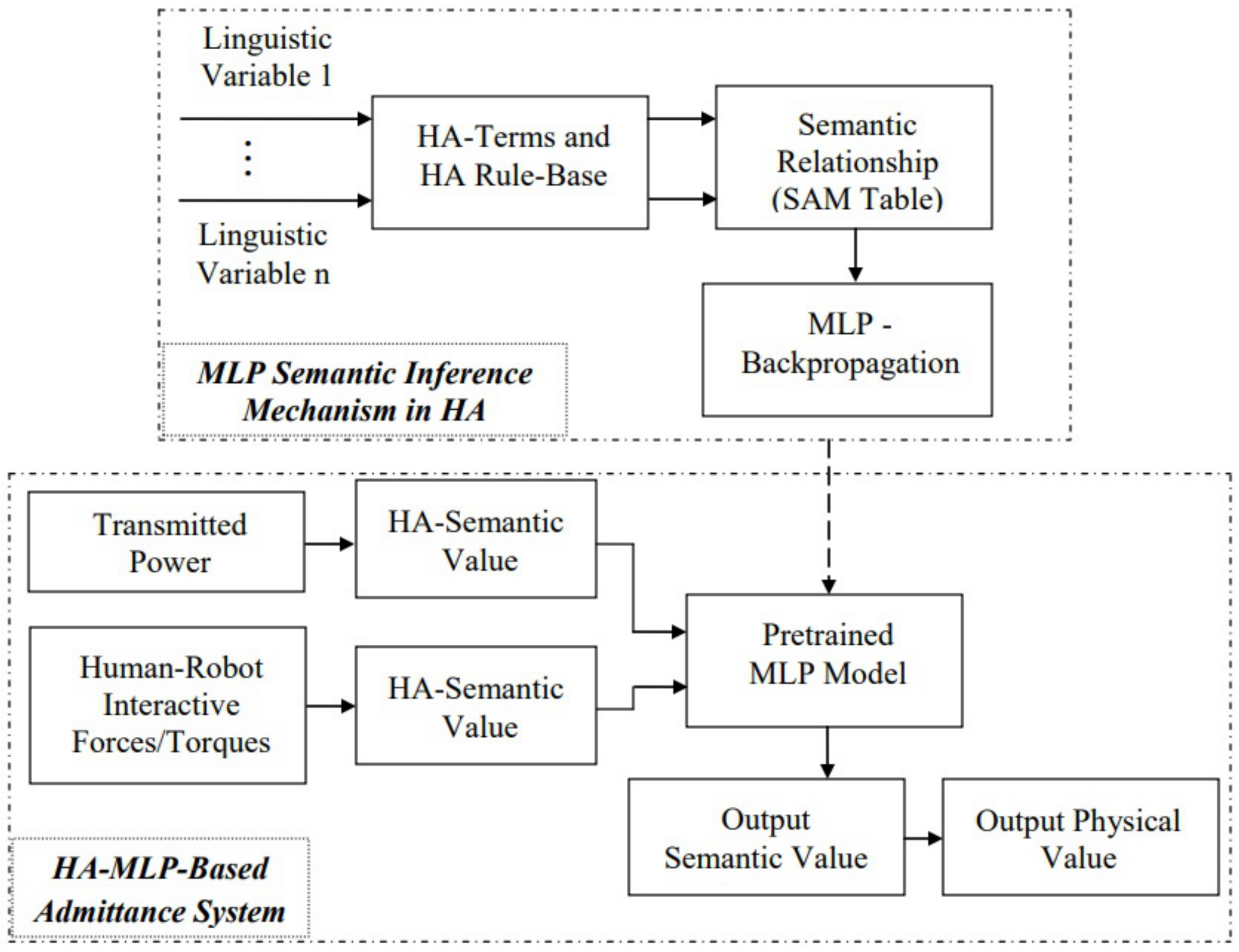
As presented in the fourth paragraph of the Introduction section, the MLP network is chosen for the semantic input–output relationship in the HA based on its properties. The proposed MLP-HA-based admittance solution is presented in Figure 4, including two main blocks: the MLP semantic inference mechanism in HA and the MLP-HA-based admittance system. In the MLP semantic inference mechanism in HA, HA-terms and HA rule-base are defined based on requirements of engineering problems. In addition, in this paper, they are presented in Table 3, Table 4 and Table 5 to solve several issues of pHRI. The semantic relationship is presented in Table 6 and Table 7. These relationships are then described by the MLP network, which is trained using backpropagation. This MLP network will be used as an interpolation method for the input–output semantic relationship in the HA-MLP-based admittance system.
In the HA-MLP-based admittance system, human–robot interactive forces/torques are measured by using a real-time external force/torque sensor mounted on the end-effector of the manipulator (haptic). Transmitted power is calculated by using Equation (2). Those values are then mapped into HA-terms and HA-semantic values. Semantic values of these linguistic variables play as inputs of the pretrained MLP model to interpolate the semantic value of the output. Finally, the physical value of output is obtained by a simple map from [0, 1] to its physical domain.
The MLP neural network is used to predict output semantic values, which will add significant benefits to HA-based admittance controllers than existing approaches, namely:
- -
- The semantic relationship between inputs and output is described adequately;
- -
- The semantic real-super-surface in 3D space becomes smoother;
- -
- Semantic values of output will be approximated in the global boundary;
- -
- The interpolation accuracy is improved.
The configuration of the MLP network is characterized by the number of hidden layers and the number of neurons in hidden layers, the number of samples propagated through the network for each gradient update, the number of trained epochs, and the learning rate. The studies based on the theorems of Kolmogorov, for example, Refs. [43,44,45], have pointed out that all of the continuous mappings from [0, 1]p to [0, 1]n can be approximated by a multilayer perceptron network of which input layer includes p neurons, output layer includes n neurons, and hidden layers include (2p + 1) neurons. However, the number of samples in the training data set is also an important factor in choosing the MLP configuration with well-fitting and capacity. To choose the configuration of the MLP network, the recommendation in [49,50] is used:
Here, Nh, Ni, No, Ns and β are the number of hidden neurons, the number of input neurons, the number of output neurons, the number of samples in the training data set, and the arbitrary scaling factor, respectively. Note, β usually belongs to [2,10].
In this paper, the input of the MLP-HA-based admittance controller are semantic values in the range [0, 1], so the sigmoid is used as a transformation function since it well-handles the data in the range [−1, 1].
The MLP-backpropagation in this paper is briefly described as below:
Step 1: Choosing the initial configuration of MLP network, learning rate η > 0, momentum parameter set α, desired error Emax, initial weights W. Setting the current error E = 0, and the current sample k = 1.
Step 2: At the kth sample, the output of ith neuron at the input layer (q =1) is measured as (q is the order of layers in the network):
The signal is propagated sequentially following the order input layer–hidden layers–output layer:
Here, qneti is the effect of (q − 1)th layer on ith neuron in qth layer at the kth sample, and j is the index of neuron in (q − 1)th layer.
Step 3: Measuring the error at the output layer:
Here, is the sample output.
Step 4: Back-propagating error and calculating the weights:
where q > 1, t is current weight update
Step 5: Checking the training iteration:
If k < p: k = k +1 and return step 2;
Else: go to step 6;
Here, p is the size of the training data
Step 6: Checking the loop condition
If E < Emax: finishing and returning the set of weights;
Else: setting E = 0, k = 1 and return to 2.
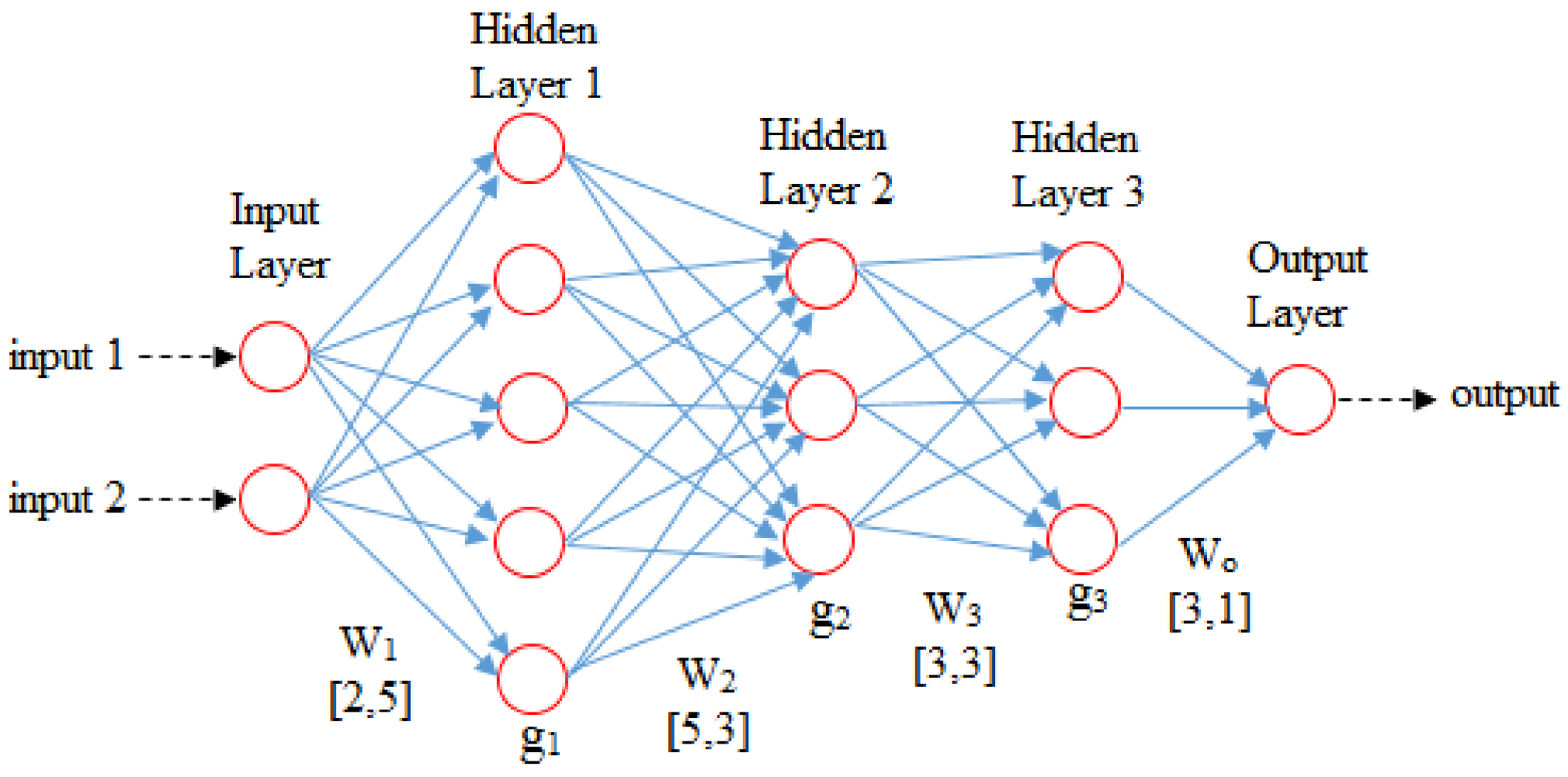
The initial weights wij are randomly chosen in the range . Here: mi is the whole number of links from neuron j to neuron i [51]. The initial value of the learning rate is randomly chosen in the range [0.1, 0.6], as presented in [52,53]. In this paper, the MLP is used as an interpolation for the semantic relationship in the HA, which is predefined based on the policy of the engineering system. For the admittance controller, the semantic relationship among inputs (semantic values of the external wrench and transmitted power) and output (semantic value of the velocity of the end-effector) are presented in Table 6 and Table 7. Therefore, the sample data for the MLP network is tabular, including Table 6 and Table 7. Moreover, to speed up the convergence of the backpropagation, the adaptive learning rate and momentum parameters are necessary since the backpropagation converges slowly, even for the medium-sized network. A five-layer network is chosen, and, initial values of momentum parameters of connection groups are 0.01, 0.03, 0.1, and 0.09, respectively, and the initial value of the learning rate is 0.4. These values will be increased or decreased depending on the gradient of the error after a number of iterations (in this paper, this parameter is 99 iterations). The desired error is Emax = 0.0002. After the training process and removing redundant neurons (neurons have values of weights approximated zero), the configuration of MLP is chosen in this paper as presented in Figure 5. This MLP consists of 5 layers, including the input layer, three hidden layers and the output layer. The input layer has two neurons, hidden layer 1 has five neurons, hidden layer 2 has three neurons, hidden layer 3 has three neurons, and the output layer has one neuron. The input 1 and input 2 of the MLP network are semantic values of the controller’s inputs (semantic values of the external wrench and transmitted power), and the output of the MLP network is the semantic value of the controller’s output (semantic value of the end-effector’s velocity).
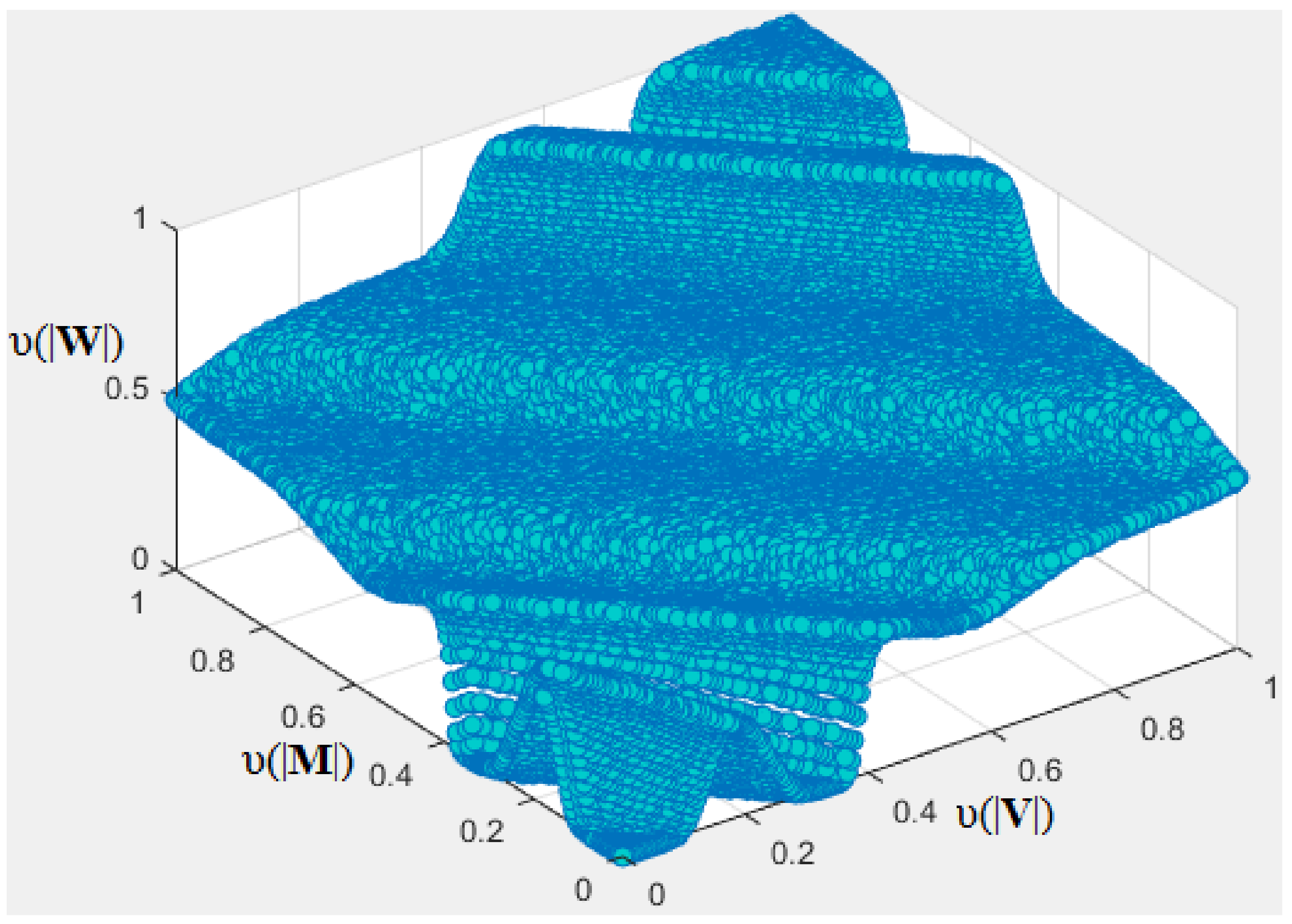
Semantic relationships in Table 6 and Table 7 are represented by super surfaces in Cartesian coordinates by using the MLP network, as presented in Figure 6 and Figure 7. It is clearly seen that these surfaces are smoother than Figure 1 and Figure 2 using previous methods. Semantic relationships in Table 6 and Table 7 are not linear. Moreover, semantic values of the output tend to change dramatically when semantic values of inputs are close to either 1 or 0. In Figure 1 and Figure 2, the four-point bilinear method is used to describe those relationships, which divided the super surface into smaller linear surfaces, bounded by four linear points. As a result, surfaces in Figure 1 and Figure 2 are created by a combination of small linear surfaces, which have continuous line intersections with each other. In contrast, semantic relationships in Figure 6 and Figure 7 are considered in the global boundary by using the MLP interpolation. Hence, wiggled values included in Figure 6 and Figure 7when semantic values of inputs are close to either 1 or 0.
Similarly, only the semantic values of outputs |V| and |W| are known. To receive their real physical values, their term semantics is mapped from [0, 1] to their individual physical domains. After obtaining the physical values of |V| and |W|, six components of the velocity’s elements of the end-effector can be calculated by Equations (33) and (34). These formulas are also used for all admittance controllers presented above:
where j indicates the direction of x, y or z-axis.
4. Stability Considerations
In physical human–robot interaction, the human factor is a part of the controller, which is extremely difficult to model and prove the stability of the system. Normally, the derivative equation of the admittance controller is the relationship between the external force and the end-effector’s velocity. In other words, the linear/angular velocity of the end-effector only depends on the translation/rotation elements of the external wrench. Consequently, a large jerk during cooperation will appear if the external force changes dramatically. Experimental studies showed that the robot could present unstable behavior with very low virtual damping and high virtual inertia of stiff environment [54]. It is suggested that the human arm has a maximum impedance that occurs when the human increases the stiffness of their arm [55]. As analyzed in [9,10], the stability of the conventional admittance controller is guaranteed by setting the virtual inertia as constant and equal to half the effective inertia of the manipulator in the directions of the motions during the experiments. The effective mass Bt is expressed as:
where M∈ R6 × 6 is the mass matrix of the manipulator’s configuration space, Bt ∈ R6 × 6 is the effective mass in the frame, and J is the Jacobian matrix.
By contrast, the stability and accuracy of fuzzy-based and HA-based controllers mainly depend on the expert knowledge-based rule base. As analyzed in [56], the fuzzy controller can be stable and ensure accuracy by choosing a good fuzzy rule and physical value domains of appropriate input and output variables. Furthermore, the mathematical foundation given by HA seems to form a new approach to solve fuzzy control problems, which is quite different from that based on the fuzzy sets. It has been shown that the HA-based controller causes smaller errors. Moreover, it can bring the controlled object to a stable state, while the controller based on other methods cannot. This point is clearly analyzed in [57,58]. Another point should be mentioned for the stability of the proposed method, which is the stability of the MLP-based input–output semantic interpolation. As presented in [59], the weight dynamics of the neural network are described by a gradient system in most cases. Therefore, the stability of the weight dynamics is not a worry since it is well-known that the gradient system possesses a Lyapunov function.
In addition, the proposed admittance controller uses the transmitted power as an additional input, which is the dot product of the external wrench vector and the actual velocity vector, whose purpose is to avoid the direct map from external forces/torques to linear/angular velocities. As presented, the natural human–robot interaction is also considered in this paper. Therefore, the velocity of end-effector and external forces include both linear and angular elements. Normally, the rotation elements have bigger effects on the stability and accuracy than translation elements since a small change of the rotation can lead to a big error. This observation raises the need to create a relationship between linear velocity and angular velocity to guarantee smooth cooperation. Based on this point, the linear velocity is calculated first based on translation elements of the external wrench and transmitted power, then the angular velocity is calculated based on the linear velocity and rotation elements of the external wrench. As shown in Equation (2), the value of transmitted power depends on Vk−1, Wk−1, F, and M. As a result, the value of the actual velocity will not change suddenly even when the external wrench changes sharply. By doing this, the jerk during cooperation is reduced.
5. Experiments
5.1. Experimental Setup
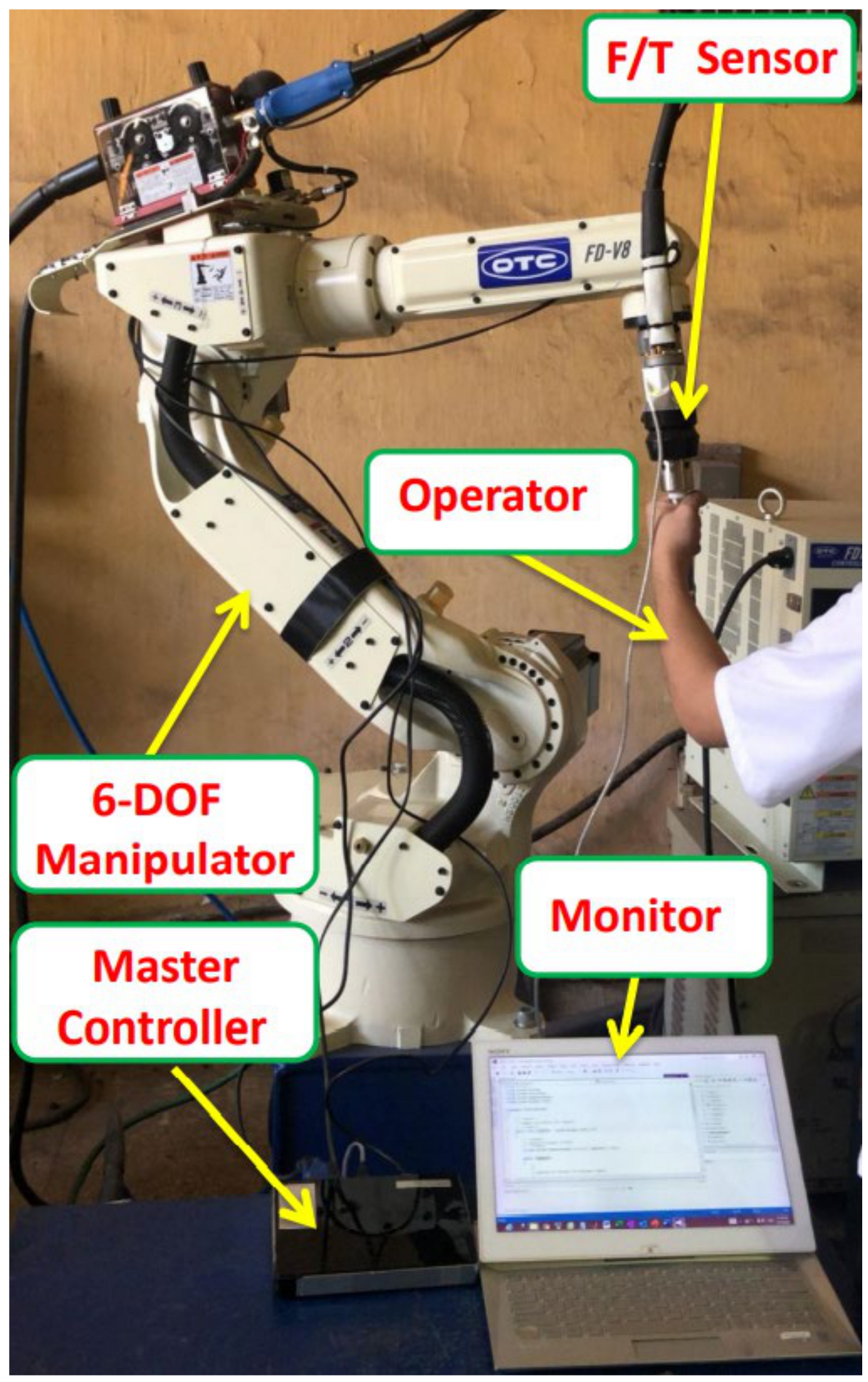
The proposed method is verified by a teaching task setup using a 6-DOF manipulator in which a real-time force/torque sensor is mounted at the end-effector, as presented in Figure 8. The operator pushes and pulls the end-effector to some desired positions to conduct the teaching task: first, the end-effector is moved to the position of an object (I), then the end-effector is moved to the desired target position (II); and finally, the end-effector is moved back to the initial position (III). In this experiment, the manipulator is moved passively based on human effort. Target positions in stages (I), (II), and (II) are memorized for later work. In this experimental implementation, the cooperation between humans and robots during conducting (I), (II), and (III) is mainly considered. This experiment is conducted sequentially using the proposed MLP-HA-based admittance controller, HA-based admittance controller with the four-point bilinear interpolation, and fuzzy-admittance controller, whose purpose is to give more circumstances to compare with the proposed method.
In this paper, a group of ten persons, including eight men and two women, and their age ranges from 23 to 55 years, is chosen to implement this teaching task. The experiment should be conducted by a group of different persons since the manipulator reacts differently depending on the person’s effort, which is different from person to person. Each person cooperates with the manipulator to serve a similar teaching task in three different scenarios using three different admittance controllers, as mentioned before.
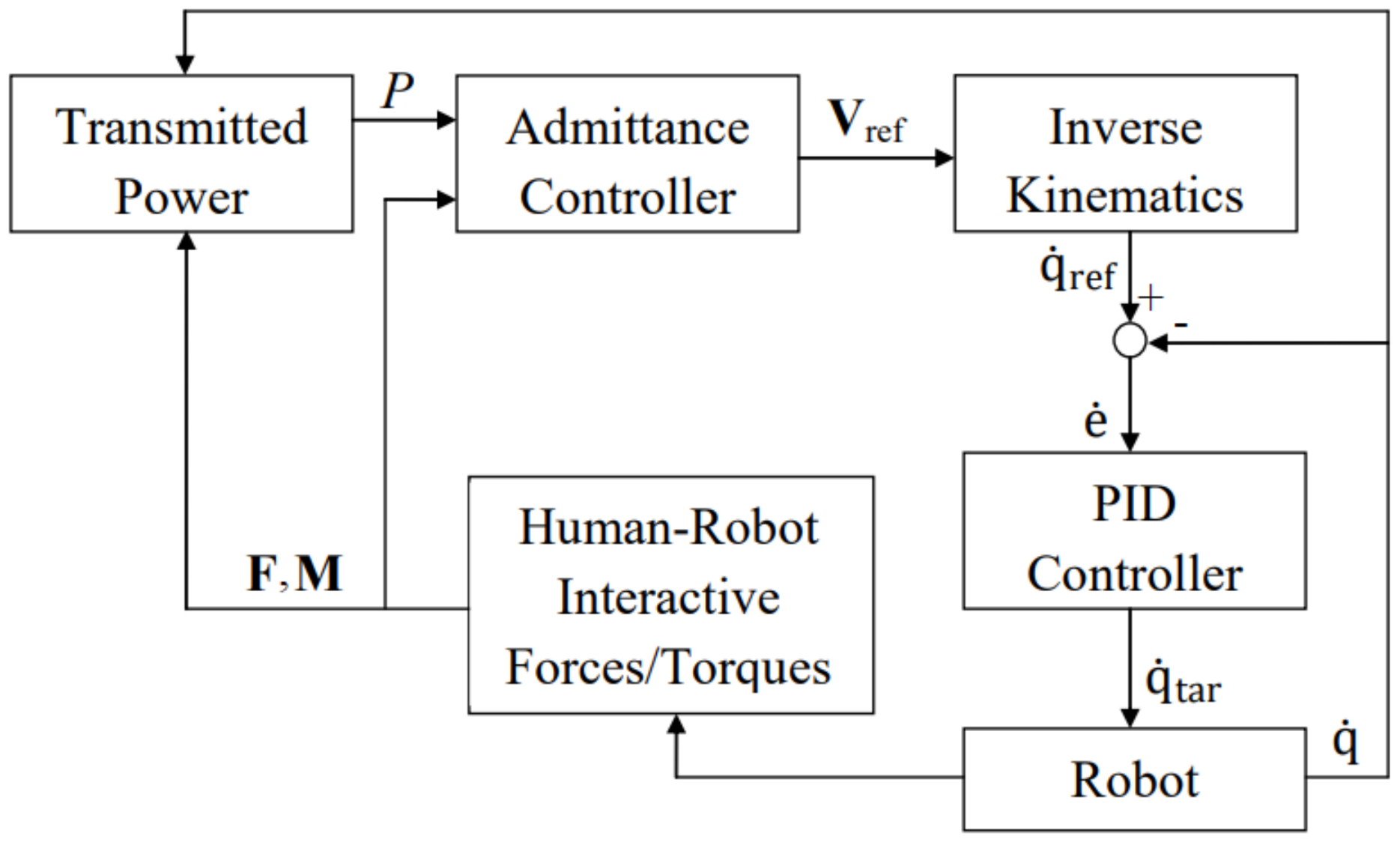
5.2. System Framework
The workflow of the experimental setup is shown in Figure 9. At each iteration, the admittance controller calculates the velocity of the end-effector based on the external wrench and power transmitted by the robot. Depending on the scenario, the admittance controller can be the proposed MLP-HA-based admittance controller, four-point bilinear-HA-based admittance controller (Bi-HA-based admittance controller), or fuzzy-based admittance controller. Desired joint velocities of the manipulator are calculated using inverse kinematics with the Jacobian method. Finally, joints of the manipulator are controlled by the PID method to follow desired values. The CAN protocol is used for the communication between the master controller and the real-time force/torque sensor, and the sample time to send and receive data is 1ms (TCAN = 1 ms). The communication between the master controller and slave controllers is implemented by using the EtherCAT protocol, with the sample time 1 ms (Tcom = 1 ms). These slave controllers are used to control motors at the joints of the robot. To cover constraints of the ISO10218 standard, the maximum allowed values of |F|, |V|, and P should be given. In this paper, these values are set to FM = 120 N, VM = 0.12 m/s, PM = 15 W, and L = 0.058 m.
5.3. Results
The percentage error in Equation (36) and the root mean square (RMS) in Equation (37) is used to estimate the error of controllers:
Here, Y is ∆|V|, ∆|W|, |Vk+1-Vk|, |Wk+1-Wk|, |F|, or |M| depending on the value, which is estimated, as shown in Table 8. In addition, N = 10 n is the total number of samples obtained from one controller (there are three different admittance controllers). As mentioned before, ten is the number of persons, who participate in the experiment, and n is the number of the repetition of the cooperation between one person and the manipulator using one different controller. In this paper, n = 5 means that there are 50 samples obtained from one admittance controller (the total sample number in this experiment is 150, obtained from three different admittance controllers). Those obtained results are processed by using Equations (36) and (37) and presented in Table 8.
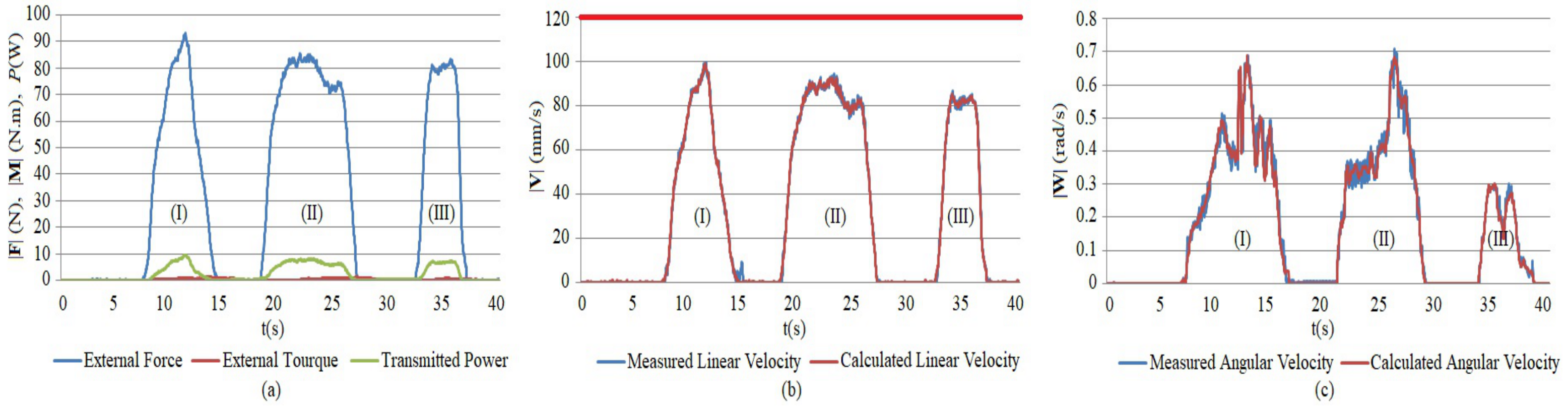
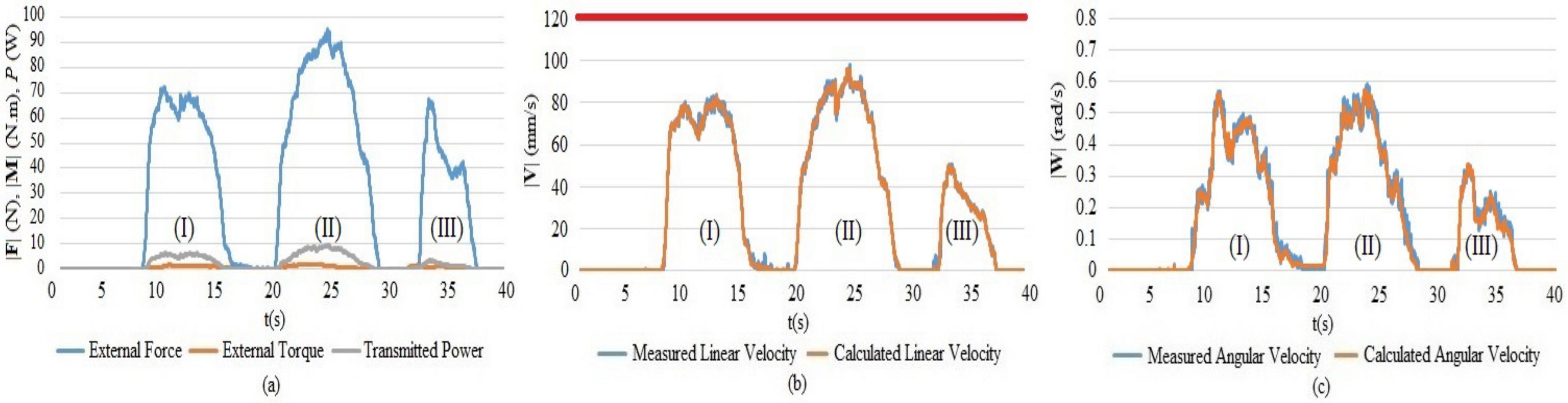
The results are presented in Table 8 and Figure 10, Figure 11, Figure 12 and Figure 13. In Table 8, MLP_HA represents the MLP-HA-based admittance controller, Bi-HA represents the Bi-HA-based admittance controller, FA the fuzzy-admittance controller. The horizontal red lines in Figure 10, Figure 11 and Figure 12 are the maximum allowed values of the norm of linear velocity.
5.4. Discussion
The mean of velocity step for each admittance controller is presented in Table 8; for the proposed MLP-HA-based admittance controller, the linear velocity step is 0.3757 mm/s, and the angular velocity step is 0.0042 rad/s, whereas the linear velocity steps are 0.4647, 0.6498 mm/s and angular velocity steps are 0.0054, 0.0062 rad/s for the Bi-HA-based and fuzzy-based admittance controllers, respectively. In addition, for the proposed MLP-HA-admittance controller, the percentage errors of linear velocity and angular velocity are 3.19% and 6.6%, respectively. These percentage errors increase to 3.52% and 8.1% for the Bi-HA-based admittance controller, 4.56% and 9.24% for the fuzzy-based admittance controller. In Figure 13, maximum steps of linear and angular velocities are about 4 mm/s and 0.05 rad/s for the proposed MLP-HA-based admittance controller, whereas those values are around 6 mm/s and 0.1 rad/s for Bi-HA-based admittance controller, and approximate 10 mm/s and −0.1 rad/s for fuzzy-based admittance controller, respectively. This analysis has shown that the proposed MLP-HA-based, Bi-HA-based and fuzzy-based admittance controllers give favorable conditions to avoid instability during the cooperation even when the external wrench is suddenly changed. Moreover, the MLP-HA-based admittance controller provides better cooperation compared to other admittance controllers. In addition, even if the external wrench is larger than the allowed value, the velocity of the end-effector always belongs in a safe domain as the applied values of the external wrench in every DOF in the interactive space are always constrained based on the ISO10218 standard to guarantee safe and natural pHRI.
In an accurate manner, the proposed MLP-HA-based approach is found to provide better cooperation in comparison with previous methods. However, an aspect should be discussed, which is the computational complexities in different approaches, including conventional methods, fuzzy-based methods, and hedge-algebras-based methods (using average/product operators, four-point bilinear, and MLP interpolation). First of all, the order of the number of necessary rules of fuzzy or HA system is O(N) [60], here N = Tn, T is the number of fuzzy or HA terms, n is the number of variables. Based on the rule base of the controller in this paper, T = 7, n = 2. The difference in the computational complexity of fuzzy and HA mainly depend on operators and interpolation methods, which are used for their inference mechanism. In this paper, max–min composition and centroid defuzzification is used for fuzzy logic. The complexity of max–min composition is O(N2) [61], the complexity of centroid defuzzification is O(TS1) [62], here S1 = 100, is the total number of samples of physical sub-domains of the output in this paper. In the HA, the computational complexity of the product/average operator is equivalent to the computational complexity of the spline interpolation O(m2N) [63], where m is the order of the spline function. By contrast, the computational complexity of the bilinear interpolation is nominally O(N). In fact, the bilinear interpolation considers only 2 × 2 neighboring points and requires the least running time [64]. Finally, the computational complexity of MLP-backpropagation in this paper is O(Co*N*ep) [65], here Co = 37 is the total number of connections in the MLP model, as presented in Figure 5, ep is the number of epochs. It is noted that the computational complexity of the MLP-backpropagation is not included in the HA-MLP-Based Admittance System. However, it should be added to the complexity of the method in total. To our best knowledge, the complicated level of mentioned methods can be sorted from level 1 to level 5 (here level 1 stands for “most simple” and level 5 stands for “most complicated”), as (level 5) MLP-HA-based admittance controller, (level 4) fuzzy-based admittance controller, (level 3) HA-based admittance controller with Average/Product operator, (level 2) HA-based admittance controller with four-point bilinear, and (level 1) conventional methods. In detail, traditional methods are the most time-consuming since inertia and damping matrices must be experimentally pre-tuned (these methods require the dynamic admittance equation). The fuzzy-based method does not require a dynamic model. However, there is no formalized linkage of fuzzy sets with the natural linguistic term semantics. In other words, there are no order-relations between linguistic terms in fuzzy logic. Moreover, fuzzification, fuzzy composition and defuzzification are quite complicated. They cannot describe the nature of linguistics adequately. HA-based methods are proposed to overcome the shortcomings of the fuzzy-based method. Therefore, the linguistic values are represented in an order-relation based on semantic values. However, the input–output semantic relationship in HA should be considered. Average/product operators are most simple, but the semantic relationship is distorted. Four-point bilinear is more complicated than average/product operators, but the accuracy is better. In addition, it can represent the super surface of the semantic relationship by linearization. Unfortunately, it is difficult to deal with multi-input systems by using the above methods for the HA semantic interpolation. In contrast, MLP interpolation gives favorable conditions to represent the semantic relationship by a super-smooth surface in Cartesian coordinates and to deal with multi-input systems, although it is more complicated. In conclusion, it is a tradeoff between the accuracy and the computational complexity to choose a suitable method for desired applications.
6. Conclusions
This paper presented a new approach for the input–output semantic inference mechanism in Hedge Algebras by using an MLP neural network, whose purpose is to improve the accuracy of the semantic interpolation. Moreover, the proposed MLP-HA-based inference mechanism is also considered for the physical human–robot interaction to eliminate the IIDM in the dynamic admittance model during the process of the controller-making since the end-effector’s velocity is adjusted directly through the external wrench and the robot’s transmitted power. In addition, the natural human–robot cooperation and the safety issue based on a specific ISO10218 standard are also covered. Potential applications of this research include: (a) the operator teaches the manipulator to implement complicated tasks, such as welding, whose purpose is to eliminate the path planning, or (b) the manipulator supports the operator to lift heavy objects up and down. The proposed MLP-HA-based admittance controller is found to provide better cooperation compared to other controllers. However, the dependency of the MLP model on the number of HA terms is still uncovered. This should be manifested in our coming research.
Author Contributions
Conceptualization, N.-V.T., P.B.K. and S.-Y.Y.; methodology, N.-V.T., P.B.K. and S.-Y.Y.; software, N.-V.T.; validation, N.-V.T., P.B.K. and S.-Y.Y.; formal analysis, N.-V.T., P.B.K. and S.-Y.Y.; investigation, N.-V.T.; resources, N.-V.T.; data curation, N.-V.T.; writing—original draft preparation, N.-V.T.; writing—review and editing, N.-V.T., P.B.K. and S.-Y.Y.; visualization, N.-V.T.; supervision, P.B.K. and S.-Y.Y.; project administration, S.-Y.Y.; funding acquisition, S.-Y.Y. All authors have read and agreed to the published version of the manuscript.
Funding
This study was supported by the Research Program funded by the SeoulTech (Seoul National University of Science and Technology).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The data presented in this study are available on request from the corresponding authors.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Navarro, B.; Cherubini, A.; Fonte, A.; Passama, R.; Poisson, G.; Fraisse, P. An ISO10218-compliant adaptive damping controller for safe Physical Human-Robot Interaction. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation(ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 3043–3048. [Google Scholar]
- Jindai, M.; Watanabe, T. A Handshake Robot System Based on a Shake-Motion Leading Model. In Proceedings of the 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Nice, France, 22–26 September 2008; pp. 3330–3335. [Google Scholar]
- Kovács, S.; Vincze, D.; Gacsi, M.; Miklósi, A.; Korondi, P. Fuzzy Automaton based Human-Robot Interaction. In Proceedings of the SAMI 2010 8th IEEE International Symposium on Applied Machine Intelligence and Informatics, Herlany, Slovakia, 28–30 January 2010; pp. 165–169. [Google Scholar]
- Kovács, S.; Vincze, D.; Gácsi, M.; Korondi, P. Interpolation based Fuzzy Automaton for Human-Robot Interaction. In Proceedings of the 9th IFAC Symposium on Robot Control, Gifu, Japan, 9–12 September 2009; Volume 42, pp. 317–322. [Google Scholar]
- Dimeas, F.; Moulianitis, V.C.; Papakonstantinou, C.; Aspragathos, N. Manipulator Performance Constraints in Cartesian Admittance Control for Human-Robot Cooperation. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 3049–3054. [Google Scholar]
- Papageorgiou, D.; Doulgeri, Z. A Kinematic Controller for Human-Robot Handshaking using Internal Motion Adaption. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 5622–5627. [Google Scholar]
- Zhong, H.; Li, X.; Gao, L.; Li, C. Toward Safe Human-Robot Interaction: A Fast-Response Admittance Control Method for Series Elastic Actuator. IEEE Trans. Autom. Sci. Eng. 2021, 99, 1–14. [Google Scholar]
- Van Toan, N.; Kim, J.-J.; Kim, K.-G.; Lee, W.; Kang, S. Application of Fuzzy Logic to Damping Controller for Safe Human-Robot Interaction. In Proceedings of the 14th International Conference on Ubiquitous Robots and Ambient Intelligence, Jeju, Korea, 28 June–1 July 2017; pp. 109–113. [Google Scholar]
- Van Toan, N.; Khoi, P.B. Fuzzy-Based Admittance Controller for Safe Natural Human-Robot Interaction. Adv. Robot. 2019, 33, 815–823. [Google Scholar] [CrossRef]
- Toan, N.; Yi, S.; Khoi, P. Hedge-Algebras-Based Admittance Controller for Safe Natural Human-Robot Interaction. Adv. Robot. 2020, 34, 1546–1558. [Google Scholar]
- Huang, J.-Y.; Lee, W.-P.; Chen, C.-C.; Dong, B.-W. Developing Emotion-Aware Human–Robot Dialogues for Domain-Specific and Goal-Oriented Tasks. Robotics 2020, 9, 31. [Google Scholar] [CrossRef]
- Moore, P. Do We Understand the Relationship between Affective Computing, Emotion and Context-Awareness? Machines 2017, 5, 16. [Google Scholar] [CrossRef] [Green Version]
- Khoi, P.; Toan, N. Application of Fuzzy Logic for Controlling Mechanism of Relative Manipulation Robot (MRM Robot). J. Sci. Technol. 2016, 54, 385–401. [Google Scholar] [CrossRef] [Green Version]
- Toan, N.; Khoi, P. A control solution for closed-form mechanisms of relative manipulation based on fuzzy approach. Int. J. Adv. Robot. Syst. 2019, 16, 1–11. [Google Scholar] [CrossRef]
- Mamdani, E. Twenty Years of Fuzzy Control: Experiences Gained and Lessons Learnt. In Proceedings of the IEEE International Conference on Fuzzy Systems, San Francisco, CA, USA, 28 March–1 April 1993; pp. 339–344. [Google Scholar]
- Wang, L. Stable adaptive fuzzy control of nonlinear systems. EEE Trans. Fuzzy Syst. 1993, 1, 146–155. [Google Scholar] [CrossRef]
- Su, C.; Stepanenko, Y. Adaptive control of a class of nonlinear systems with fuzzy logic. IEEE Trans. Fuzzy Syst. 1994, 2, 285–294. [Google Scholar]
- Yang, Y.; Jia, X.; Zhou, C. Robust adaptive fuzzy control for a class of uncertain nonlinear systems. In Intelligent Techniques and Soft Computing in Nuclear Science and Engineering; World Scientific: Singapore, 2000; pp. 303–310. [Google Scholar]
- Takagi, T.; Sugeno, M. Fuzzy identification of systems and its applications to modeling and control. IEEE Trans. Syst. Man Cybern. 1985, 15, 116–132. [Google Scholar] [CrossRef]
- Wang, L. A Course in Fuzzy Systems and Control; Prentice-Hall: Upper Saddle River, NJ, USA, 1997. [Google Scholar]
- Dimeas, F.; Aspragatho, N. Fuzzy Learning Variable Admittance Control for Human-Robot Cooperation. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Chicago, IL, USA, 14–18 September 2014; pp. 4770–4775. [Google Scholar]
- Jamil, M.; Jalani, J.; Ahmad, A. A new Approach of Active Compliance Control via Fuzzy Logic Control for Multifingered Robot Hand. In Proceedings of the First International Workshop on Pattern Recognition, Tokyo, Japan, 11–15 July 2016. [Google Scholar]
- Ho, N.; Nam, H. An algebraic approach to linguistic hedges in Zadeh’s fuzzy logic. Fuzzy Sets Syst. 2002, 129, 229–254. [Google Scholar] [CrossRef]
- Ho, N.; Wechler, W. Hedge algebras: An algebraic approach to structure of sets of linguistic truth values. Fuzzy Sets Syst. 1990, 35, 281–293. [Google Scholar]
- Ho, N.; Wechler, W. Extended hedge algebras and their application to fuzzy logic. Fuzzy Sets Syst. 1992, 52, 259–281. [Google Scholar] [CrossRef]
- Ho, N.; Tran, T.; Pham, D. Modeling of a semantic score of linguistic terms based on an extension of hedge algebra semantics and its application. Knowl. Based Syst. 2014, 67, 244–262. [Google Scholar]
- Khoi, P.; Toan, N. Hedge-Algebras-Based Controller for Mechanisms of Relative Manipulation. Int. J. Precis. Eng. Manuf. 2018, 19, 377–385. [Google Scholar] [CrossRef]
- Bui, H.; Tran, D.; Vu, N. Optimal fuzzy control of an inverted pendulum. J. Vib. Control. 2011, 18, 2097–2110. [Google Scholar] [CrossRef]
- Bui, H.; Nguyen, C.; Bui, V.; Le, K.; Tran, H. Vibration control of uncertain structures with actuator saturation using hedge-algebras-based fuzzy controller. J. Vib. Control. 2017, 23, 1984–2002. [Google Scholar] [CrossRef]
- Duc, N.; Vu, N.; Tran, D.; Bui, H. A study on the application of hedge algebras to active fuzzy control of a seism-excited structure. Vib. Control. 2011, 18, 2186–2200. [Google Scholar] [CrossRef]
- Nguyen, C.; Pedrycz, W.; Duong, T.; Tran, T. A Genetic Design of Linguistic Terms for Fuzzy Rule based Classifiers. Int. J. Approx. Reason. 2013, 54, 1–21. [Google Scholar] [CrossRef]
- Phong, P.; Dong, D.; Khang, T. Hedge Algebra based Type-2 Fuzzy Logic System and its Application to Predict Survival Time of Myeloma Patients. In Proceedings of the International Conference on Knowledge and Systems Engineering, Hanoi, Vietnam, 13–17 October 2009; pp. 13–18. [Google Scholar]
- Vukadinović, D.; Bašić, M.; Nguyen, C.; Vu, N.; Nguyen, T. Hedge-algebra-based voltage controller for a self-excited induction generator. Control. Eng. Pr. 2014, 30, 78–90. [Google Scholar] [CrossRef]
- Choi, H.; Park, S. A Survey of Machine Learning-Based System Performance Optimization Techniques. Appl. Sci. 2021, 11, 3235. [Google Scholar] [CrossRef]
- Telenyk, S.; Pogorilyy, S.; Kramov, A. Evaluation of the Coherence of Polish Texts Using Neural Network Models. Appl. Sci. 2021, 11, 3210. [Google Scholar] [CrossRef]
- Garrido-Muñoz, I.; Montejo-Ráez, A.; Martínez-Santiago, F.; Ureña-López, L.A. A Survey on Bias in Deep NLP. Appl. Sci. 2021, 11, 3184. [Google Scholar] [CrossRef]
- Adegun, A.A.; Viriri, S.; Yousaf, M.H. A Probabilistic-Based Deep Learning Model for Skin Lesion Segmentation. Appl. Sci. 2021, 11, 3025. [Google Scholar] [CrossRef]
- Mathew, J.; Kshirsagar, R.; Zabeen, S.; Smyth, N.; Kanarachos, S.; Langer, K.; Fitzpatrick, M.E. Machine Learning-Based Prediction and Optimisation System for Laser Shock Peening. Appl. Sci. 2021, 11, 2888. [Google Scholar] [CrossRef]
- Zhang, X.; Kuehnelt, H.; DeRoeck, W. Traffic Noise Prediction Applying Multivariate Bi-Directional Recurrent Neural Network. Appl. Sci. 2021, 11, 2714. [Google Scholar] [CrossRef]
- Tasnim, N.; Islam, M.K.; Baek, J.-H. Deep Learning Based Human Activity Recognition Using Spatio-Temporal Image Formation of Skeleton Joints. Appl. Sci. 2021, 11, 2675. [Google Scholar] [CrossRef]
- Khan, M.A.; Kim, J. Toward Developing Efficient Conv-AE-Based Intrusion Detection System Using Heterogeneous Dataset. Electronics 2020, 9, 1771. [Google Scholar] [CrossRef]
- Khoi, P.B.; Van Toan, N. Optimizing Neuro-Fuzzy System for Robot Control. J. Sci. Technol. 2014, 52, 685–699. [Google Scholar]
- Kurkova, V. Kolmogorov’s theorem and multilayer neural networks. Neural Netw. 1992, 5, 501–506. [Google Scholar] [CrossRef]
- Pinkus, A. Approximation theory of the MLP model in neural networks. Acta. Numer. 1999, 8, 143–195. [Google Scholar] [CrossRef]
- Maiorov, V.; Pinkus, A. Lower bounds for approximation by MLP neural networks. Neurocomputing. 1999, 25, 81–91. [Google Scholar] [CrossRef] [Green Version]
- Ali, O.; Ali, A.; Sumait, B. Comparison between the Effects of Different Types of Membership Functions on Fuzzy Logic Controller Performance. Int. J. Emerg. Eng. Res. Technol. 2015, 3, 76–83. [Google Scholar]
- Naaz, S.; Alam, A.; Biswas, R. Effect of Different Defuzzification Methods in a Fuzzy Based Load Balancing Application. Int. J. Comput. Sci. Issues 2011, 8, 261–267. [Google Scholar]
- Buss, S. 3D Computer Graphics: A Mathematical Introduction with OpenGL; Cambridge University Press: New York, NY, USA, 2003. [Google Scholar]
- Schultz, M.; Reitmann, S. Prediction of Aircraft Boarding Time using LSTM Network. In Proceedings of the 2018 Winter Simulation Conference, Gothenburg, Sweden, 9–12 December 2018; pp. 2330–2341. [Google Scholar]
- Hagan, M.T.; Demuth, H.B.; Beale, M.H. Neural Network Design, 2nd ed.; University of Colorado Bookstore: Boulder, CO, USA, 2014. [Google Scholar]
- Wessels, L.; Barnard, E. Avoiding False Local Minima by Proper Initialization of Connections. IEEE Trans. Neural Netw. 1992, 3, 805–899. [Google Scholar] [CrossRef]
- Hertz, J.; Krogh, A.; Palmer, R.G. Introduction to the Theory of Neural Computation; Addison-Wesley: New York, NY, USA, 1991. [Google Scholar]
- Hochreiter, S.; Bengio, Y.; Fransconi, P.; Schmidhuber, J. Gradient Flow in Recurrent Nets: The Difficulty of Learning Long-Term Dependencies; Wiley-IEEE Press: Hoboken, NJ, USA, 2001. [Google Scholar]
- Tsumugiwa, T.; Yokogawa, R.; Yoshida, K. Stability analysis for impedance control of robot for human-robot cooperative task system. In Proceedings of the 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Sendai, Japan, 28 September–2 October 2004; pp. 3883–3888. [Google Scholar]
- Mussa-Ivaldi, F.; Hogan, N.; Bizzi, E. Neural, mechanical, and geometric factors subserving arm posture in humans. J. Neurosci. 1985, 5, 2732–2743. [Google Scholar] [CrossRef]
- Phan, K.B.; Ha, H.T.; Hoang, S.V. Eliminating the effect of uncertainties of cutting forces by fuzzy controller for robots in millings process. Appl. Sci. 2020, 10, 1685. [Google Scholar] [CrossRef]
- Cat, H.N.; Nhu, L.V.; LeXuan, V. An Interpolative reasoning method based on hedge algebras and its application to a problem of fuzzy control. In Proceedings of the 10th WSEAS International Conference on Computers, Vouliagmeni, Athens, Greece, 10–15 July 2006; pp. 526–534. [Google Scholar]
- Ho, N.C.; Lan, V.N.; Viet, L.X. Optimal hedge-algebras-based controller: Design and application. Fuzzy Sets Syst. 2008, 159, 968–989. [Google Scholar] [CrossRef]
- Olafsson, S. On the Stability of Neural Networks with Arbitrary Weights. Neural Comput. Appl. 1996, 4, 2–9. [Google Scholar] [CrossRef]
- Daniela, A. Fuzzy Rule Base Complexity Reduction: A Survey. In Proceedings of the 15th International Conference on Control Systems and Computer Science, Politehnica University of Bucharest, Bucharest, Romania, 25–27 May 2005; pp. 33–37. [Google Scholar]
- Hsuan-Shih, L. An optimal algorithm for computing the max-min transitive closure of a fuzzy similarity matrix. Fuzzy Sets Syst. 2001, 123, 129–136. [Google Scholar]
- Feilong, L. An Efficient Centroid Type Reduction Strategy for General Type-2 Fuzzy Logic System. Inf. Sci. 2008, 178, 2224–2236. [Google Scholar]
- Toraichi, K.; Katagishi, K.; Sekita, I.; Mori, R. Computational complexity of spline interpolation. Int. J. Syst. Sci. 1987, 18, 945–954. [Google Scholar] [CrossRef]
- Acharya, T.; Tsai, P.S. Computational Foundations of Image Interpolation Algorithms. ACM Ubiquity 2007, 8, 1–17. [Google Scholar] [CrossRef]
- Serpen, G.; Gao, Z. Complexity Analysis of Multilayer Perceptron Neural Network Embedded into a Wireless Sensor Network. Procedia Comput. Sci. 2014, 36, 192–197. [Google Scholar] [CrossRef] [Green Version]
Short Biography of Authors
Nguyen-Van Toan received the Degree of Engineer in Mechatronics from Center for Training of Excellent Students, Hanoi University of Science and Technology, in 2014. He studied Master course and researched at Korea Institute of Science and Technology, Seoul, South Korea until 2018. He is now studying forward to PhD program at Department of Electrical and Information Engineering, Seoul National University of Science and Technology, Seoul, South Korea. Simultaneously, he is a researcher at Robotics R&D center, Syscon, Robot Land, South Korea. His current research interests include robotics, fuzzy control, expert knowledge, artificial intelligence, hedge algebras, and genetic algorithm.
Phan Bui Khoi received his Doctorate degree in Robotics from Mechanical Engineering Research Institute of the Russian Academy of Sciences in 1997. He is Assoc. Professor of dynamics and control of robot and mechatronic system at Hanoi University of Science and Technology. His current research, which focuses on robots applying in mechanical engineering and service, is concerned with dynamics and control of serial robots, mobile robots, parallel and cooperate robots, force control, fuzzy control; control of robots and mechatronic systems based on artificial intelligence, hedge algebras and genetic algorithm.
Soo-Yeong Yi received his M.S. and Ph.D. degrees in Electrical Engineering from Korea Advanced Institute of Science and Technology, in 1990 and 1994, respectively. During 1995–1999, he stayed in Human Robot Research Center in Korea Institute of Science and Technology as a senior researcher. He was a professor in the Division of Electronics and Information Engineering, Chonbuk National University, Korea from September 1999 to February 2007. He was also a post doctorial researcher in the Department of Computer Science, University of Southern California, Los Angeles in 1997 and a visiting researcher in the Dept. of Electrical and Computer Engineering, University of Illinois at Urbana-Champaign in 2005.He is now with the Department of Electrical and Information Engineering in Seoul National University of Science and Technology, Korea. His primary research interest is in the area of robot vision, and intelligent control theory.
Figure 1.
The realgridsurface describes the semantic relationship between |V|, |F| and P based on the four-point bilinear interpolation method.
Figure 1.
The realgridsurface describes the semantic relationship between |V|, |F| and P based on the four-point bilinear interpolation method.

Figure 2.
The realgridsurface describes the semantic relationship between |W|, |M| and |V| based on the four-point bilinear interpolation method.
Figure 2.
The realgridsurface describes the semantic relationship between |W|, |M| and |V| based on the four-point bilinear interpolation method.

Figure 3.
The four-point bilinear interpolation. Here, Q11 = (a1, b1, z11), Q12 = (a1, b2, z12), Q21 = (a2, b1, z21), Q22 = (a2, b2, z22), and Q = (a, b, zq).
Figure 3.
The four-point bilinear interpolation. Here, Q11 = (a1, b1, z11), Q12 = (a1, b2, z12), Q21 = (a2, b1, z21), Q22 = (a2, b2, z22), and Q = (a, b, zq).

Figure 4.
The diagram of the HA-MLP system, including two main processes: (1) the MLP network is used to represent the input–output semantic relationship, (2) the pre-trained MLP model is used for the admittance system.
Figure 4.
The diagram of the HA-MLP system, including two main processes: (1) the MLP network is used to represent the input–output semantic relationship, (2) the pre-trained MLP model is used for the admittance system.

Figure 5.
The MLP network configuration.

Figure 6.
The realgridsurface describes the semantic relationship between |V|, |F| and P based on the MLP network.
Figure 6.
The realgridsurface describes the semantic relationship between |V|, |F| and P based on the MLP network.

Figure 7.
The realgridsurface describes the semantic relationship between |W|, |M| and |V| based on the MLP network.
Figure 7.
The realgridsurface describes the semantic relationship between |W|, |M| and |V| based on the MLP network.

Figure 8.
The experimental setup for teaching tasks.

Figure 9.
System framework, admittance controller block represents MLP-HA-based admittance controller, Bi-HA-based admittance controller, or fuzzy-based admittance controller depending on the scenario.
Figure 9.
System framework, admittance controller block represents MLP-HA-based admittance controller, Bi-HA-based admittance controller, or fuzzy-based admittance controller depending on the scenario.

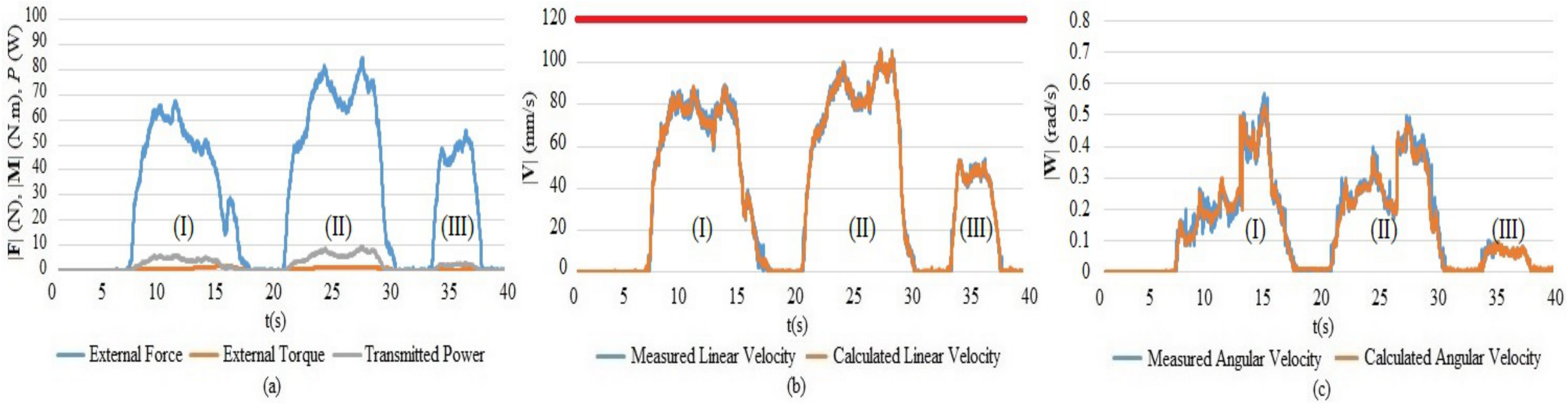
Figure 10.
Experimental results using MLP-HA-based admittance controller, (a) presents the inputs |F| (N), |M| (Nm) and P (W); (b) and (c) present outputs |V| (mm/s) and |W| (rad/s), respectively.
Figure 10.
Experimental results using MLP-HA-based admittance controller, (a) presents the inputs |F| (N), |M| (Nm) and P (W); (b) and (c) present outputs |V| (mm/s) and |W| (rad/s), respectively.

Figure 11.
Experimental results using Bi-HA-based admittance controller, (a) presents the inputs |F| (N), |M| (Nm) and P (W); (b) and (c) present outputs |V| (mm/s) and |W| (rad/s), respectively.
Figure 11.
Experimental results using Bi-HA-based admittance controller, (a) presents the inputs |F| (N), |M| (Nm) and P (W); (b) and (c) present outputs |V| (mm/s) and |W| (rad/s), respectively.

Figure 12.
Experimental results using fuzzy-based admittance controller, (a) presents the inputs |F| (N), |M| (Nm) and P (W); (b) and (c) present outputs |V| (mm/s) and |W| (rad/s), respectively.
Figure 12.
Experimental results using fuzzy-based admittance controller, (a) presents the inputs |F| (N), |M| (Nm) and P (W); (b) and (c) present outputs |V| (mm/s) and |W| (rad/s), respectively.

Figure 13.
The variation of end-effector during teaching task, (a) the variation of linear velocity (mm/s), (b) the variation of angular velocity (rad/s). Here, MLP-HA is the proposed MLP-HA-based admittance controller, Bi-HA is Bi-HA-based admittance controller, and FA is a fuzzy-based admittance controller. MLP-HA-based admittance controlleris found to provide better cooperation compared to other controllers.
Figure 13.
The variation of end-effector during teaching task, (a) the variation of linear velocity (mm/s), (b) the variation of angular velocity (rad/s). Here, MLP-HA is the proposed MLP-HA-based admittance controller, Bi-HA is Bi-HA-based admittance controller, and FA is a fuzzy-based admittance controller. MLP-HA-based admittance controlleris found to provide better cooperation compared to other controllers.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Fuzzy rule base for |V|.
| |V| | |F| | Z | S | M | QB | B |
|---|---|---|---|---|---|---|
| P | ||||||
| Z | Z | S | S | M | M | |
| S | S | S | M | M | QB | |
| M | S | M | M | QB | QB | |
| QB | M | M | QB | QB | B | |
| B | M | QB | QB | B | B | |
Table 2.
Fuzzy rule base for |W|.
| |W| | |M| | Z | S | M | QB | B |
|---|---|---|---|---|---|---|
| |V| | ||||||
| Z | Z | Z | S | S | M | |
| S | Z | S | S | M | M | |
| M | S | S | M | M | QB | |
| QB | S | M | M | QB | QB | |
| B | M | M | QB | QB | B | |
Table 3.
Term transformation of the linguistic values.
| For FL | - | Z | S | M | QB | B | - |
| For HA | 0 | EI | QI | W | QC | EC | 1 |
Table 4.
Rule base for HA controller for |V|.
| |V| | |F| | 0 | EI | QI | W | QC | EC | 1 |
|---|---|---|---|---|---|---|---|---|
| P | ||||||||
| 0 | 0 | EI | EI | QI | QI | W | W | |
| EI | EI | EI | QI | QI | W | W | QC | |
| QI | EI | QI | QI | W | W | QC | QC | |
| W | QI | QI | W | W | QC | QC | EC | |
| QC | QI | W | W | QC | QC | EC | EC | |
| EC | W | W | QC | QC | EC | EC | 1 | |
| 1 | W | QC | QC | EC | EC | 1 | 1 | |
Table 5.
Rule base for HA controller for |W|.
| |W| | |M| | 0 | EI | QI | W | QC | EC | 1 |
|---|---|---|---|---|---|---|---|---|
| |V| | ||||||||
| 0 | 0 | 0 | EI | EI | QI | QI | W | |
| EI | 0 | EI | EI | QI | QI | W | W | |
| QI | EI | EI | QI | QI | W | W | QC | |
| W | EI | QI | QI | W | W | QC | QC | |
| QC | QI | QI | W | W | QC | QC | EC | |
| EC | QI | W | W | QC | QC | EC | EC | |
| 1 | W | W | QC | QC | EC | EC | 1 | |
Table 6.
The semantic relationship-based rule base of |V|.
| |V| | |F| | |||||||
|---|---|---|---|---|---|---|---|---|
| υ(0) = 0 | υ(EI) = 0.125 | υ(QI) = 0.375 | υ(W) = 0.5 | υ(QC) = 0.625 | υ(EC) = 0.875 | υ(1) = 1 | ||
| P | υ(0) = 0 | 0 | 0.125 | 0.125 | 0.375 | 0.375 | 0.5 | 0.5 |
| υ(EI) = 0.125 | 0.125 | 0.125 | 0.375 | 0.375 | 0.5 | 0.5 | 0.625 | |
| υ(QI) = 0.375 | 0.125 | 0.375 | 0.375 | 0.5 | 0.5 | 0.625 | 0.625 | |
| υ(W) = 0.5 | 0.375 | 0.375 | 0.5 | 0.5 | 0.625 | 0.625 | 0.875 | |
| υ(QC) = 0.625 | 0.375 | 0.5 | 0.5 | 0.625 | 0.625 | 0.875 | 0.875 | |
| υ(EC) = 0.875 | 0.5 | 0.5 | 0.625 | 0.625 | 0.875 | 0.875 | 1 | |
| υ(1) = 1 | 0.5 | 0.625 | 0.625 | 0.875 | 0.875 | 1 | 1 | |
Table 7.
The semantic relationship-based rule base of |W|.
| |W| | |M| | |||||||
|---|---|---|---|---|---|---|---|---|
| υ(0) = 0 | υ(EI) = 0.125 | υ(QI) = 0.375 | υ(W) = 0.5 | υ(QC) = 0.625 | υ(EC) = 0.875 | υ(1) = 1 | ||
| |V| | υ(0) = 0 | 0 | 0 | 0.125 | 0.125 | 0.375 | 0.375 | 0.5 |
| υ(EI) = 0.125 | 0 | 0.125 | 0.125 | 0.375 | 0.375 | 0.5 | 0.5 | |
| υ(QI) = 0.375 | 0.125 | 0.125 | 0.375 | 0.375 | 0.5 | 0.5 | 0.625 | |
| υ(W) = 0.5 | 0.125 | 0.375 | 0.375 | 0.5 | 0.5 | 0.625 | 0.625 | |
| υ(QC) = 0.625 | 0.375 | 0.375 | 0.5 | 0.5 | 0.625 | 0.625 | 0.875 | |
| υ(EC) = 0.875 | 0.375 | 0.5 | 0.5 | 0.625 | 0.625 | 0.875 | 0.875 | |
| υ(1) = 1 | 0.5 | 0.5 | 0.625 | 0.625 | 0.875 | 0.875 | 1 | |
Table 8.
Estimated errors.
| Method | MLP_HA | Bi_HA | FA | |
|---|---|---|---|---|
| Δ|V| (%) | RMS | 3.19 | 3.52 | 4.56 |
| Δ|W|(%) | RMS | 6.6 | 8.1 | 9.24 |
| |Vk+1-Vk|(mm/s) | RMS | 0.3757 | 0.4647 | 0.6498 |
| |Wk+1-Wk| (rad/s) | RMS | 0.0042 | 0.0054 | 0.0062 |
| |F|(N) | max | 92.99 | 95.38 | 84.73 |
| RMS | 62.29 | 55.77 | 50.12 | |
| |M| (Nm) | max | 1.0096 | 1.91 | 1.79 |
| RMS | 0.473 | 0.86 | 0.72 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Toan, N.-V.; Khoi, P.-B.; Yi, S.-Y. A MLP-Hedge-Algebras Admittance Controller for Physical Human–Robot Interaction. Appl. Sci. 2021, 11, 5459. https://doi.org/10.3390/app11125459
AMA Style
Toan N-V, Khoi P-B, Yi S-Y. A MLP-Hedge-Algebras Admittance Controller for Physical Human–Robot Interaction. Applied Sciences. 2021; 11(12):5459. https://doi.org/10.3390/app11125459
Chicago/Turabian StyleToan, Nguyen-Van, Phan-Bui Khoi, and Soo-Yeong Yi. 2021. "A MLP-Hedge-Algebras Admittance Controller for Physical Human–Robot Interaction" Applied Sciences 11, no. 12: 5459. https://doi.org/10.3390/app11125459
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.