Construction of Measurement Matrix Based on Cyclic Direct Product and QR Decomposition for Sensing and Reconstruction of Underwater Echo


Abstract
:1. Introduction
2. Compressive Sensing and Measurement Matrix
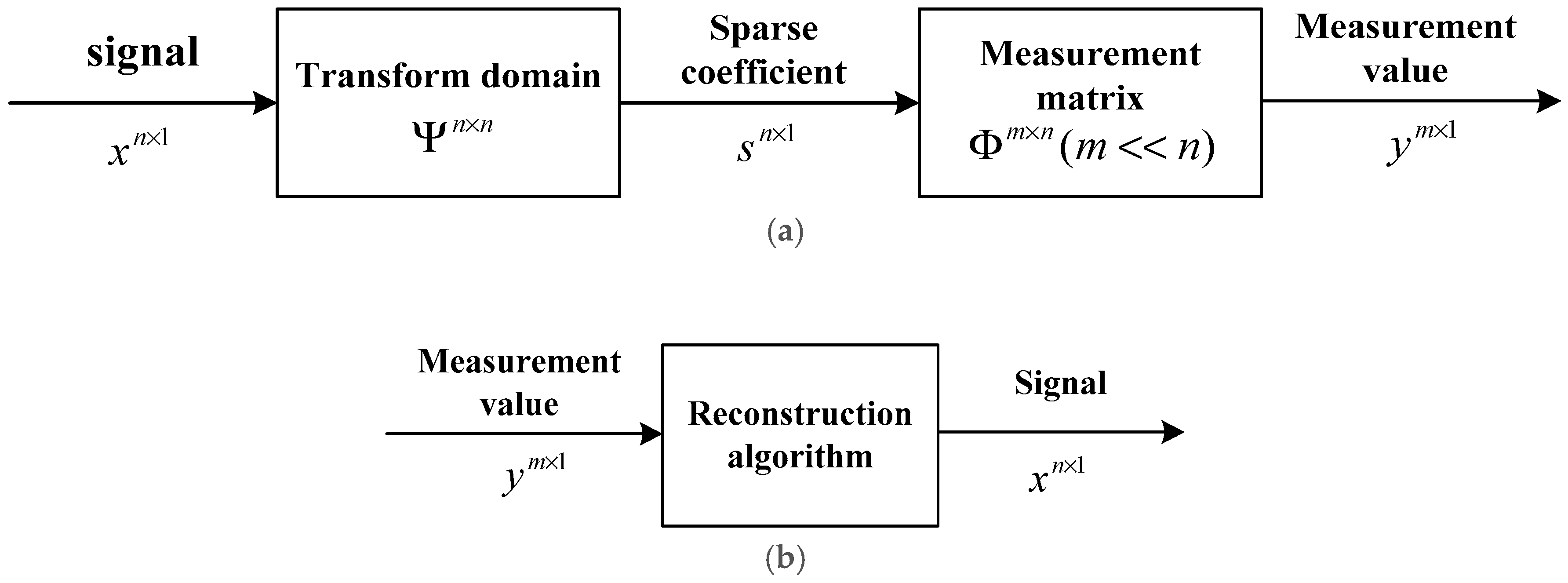
2.1. Compressive Sensing (CS)
2.2. Measurement Matrix
3. Construction of Measurement Matrix by Cyclic Direct Product and QR Decomposition
3.1. Definition of Direct Product
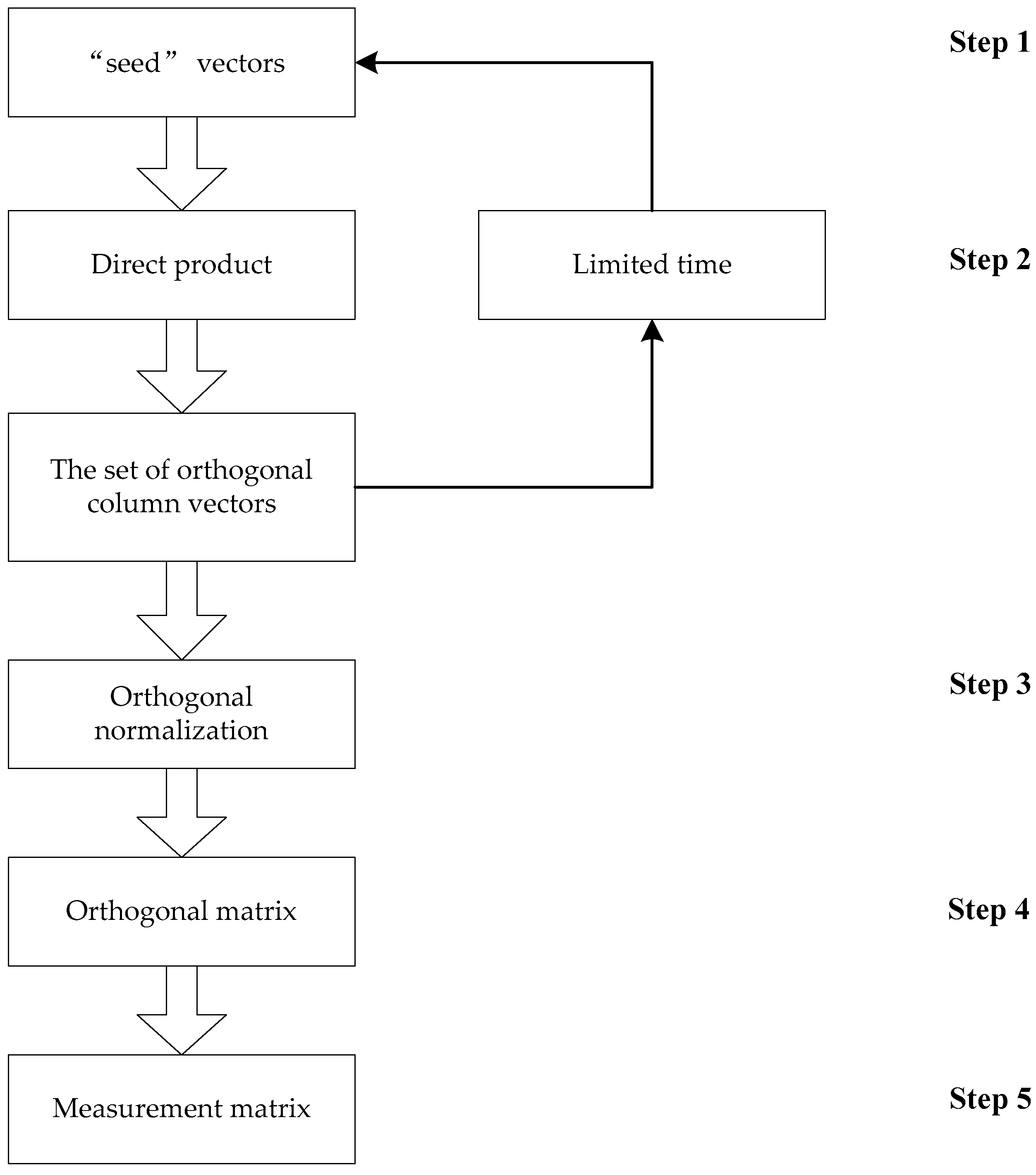
3.2. Construction of Measurement Matrix Based On Cyclic Direct Product and QR Decomposition
4. Testing the Performance of Measurement Matrix Using Simulated Underwater Echo
4.1. Parameters Used in Performance Testing
- (a)
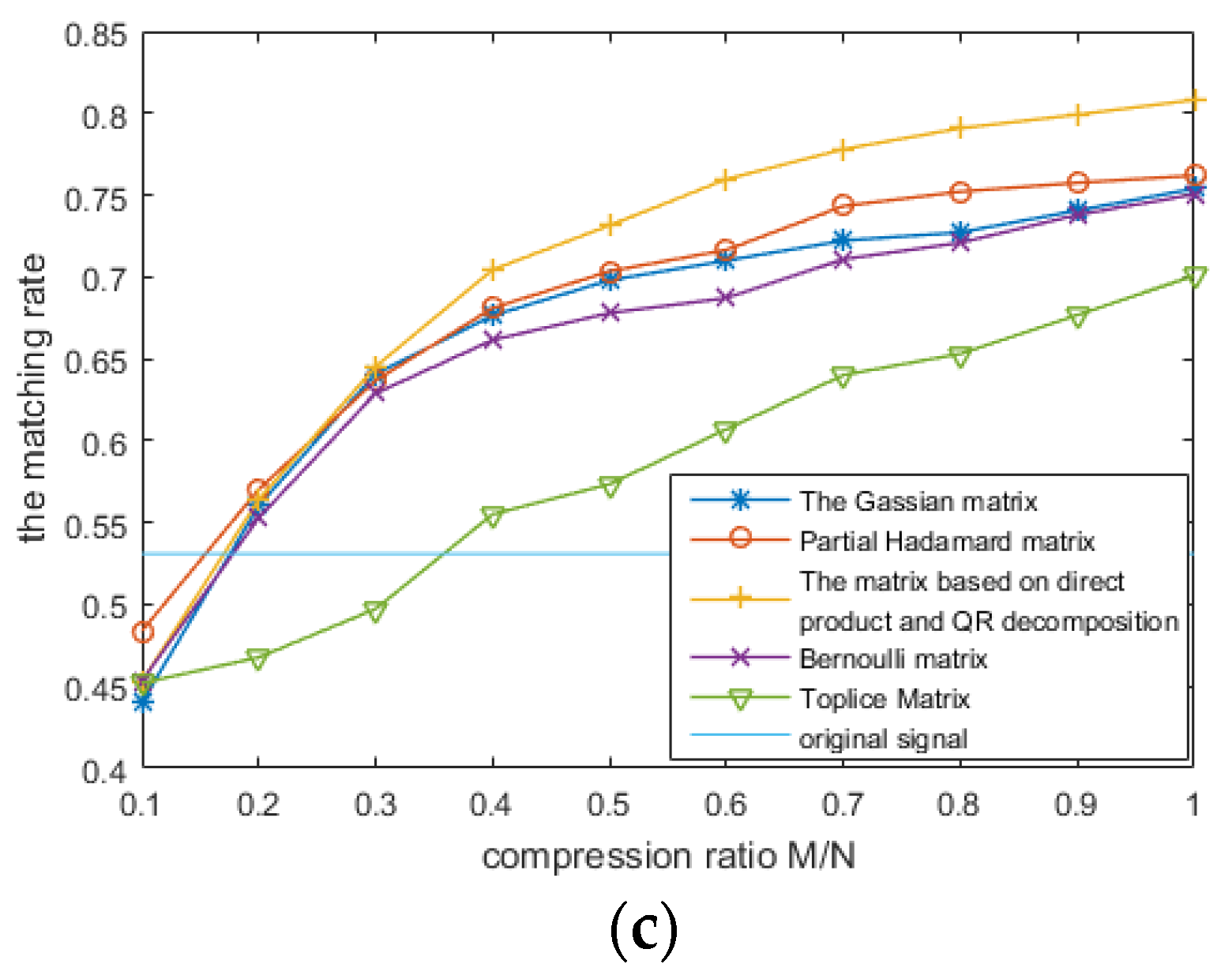
- Signal-to-noise ratio:
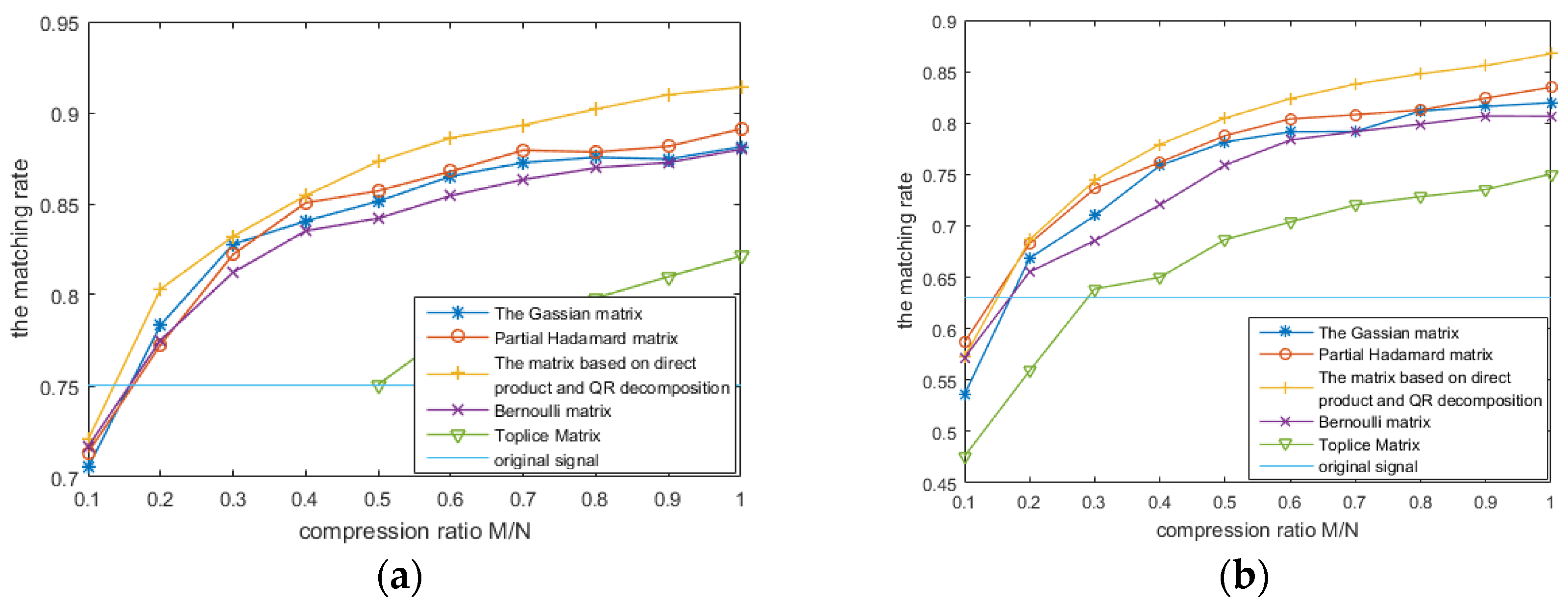
- (b)
- Matching rate:In which and X’ are the absolute values of and X.
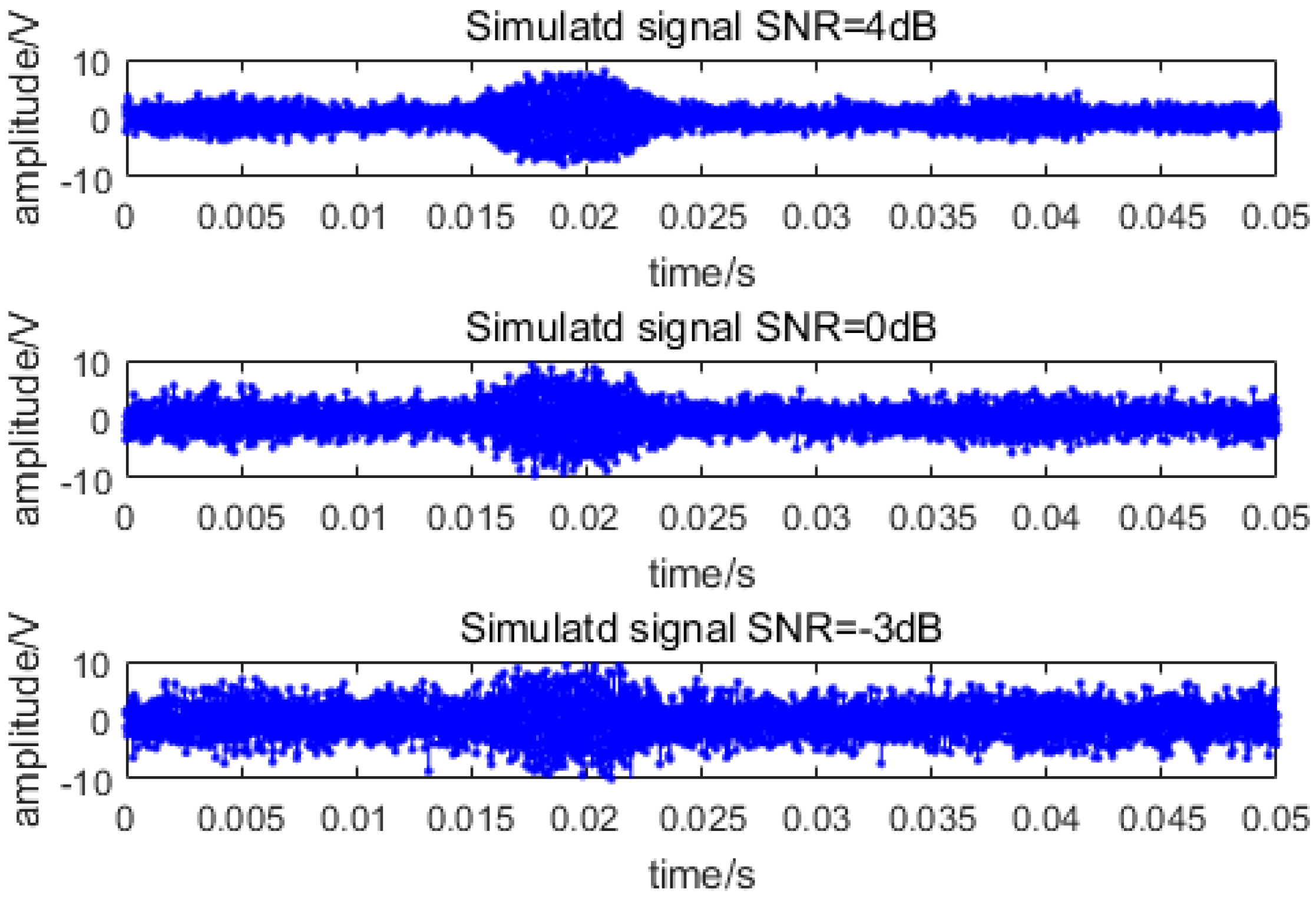
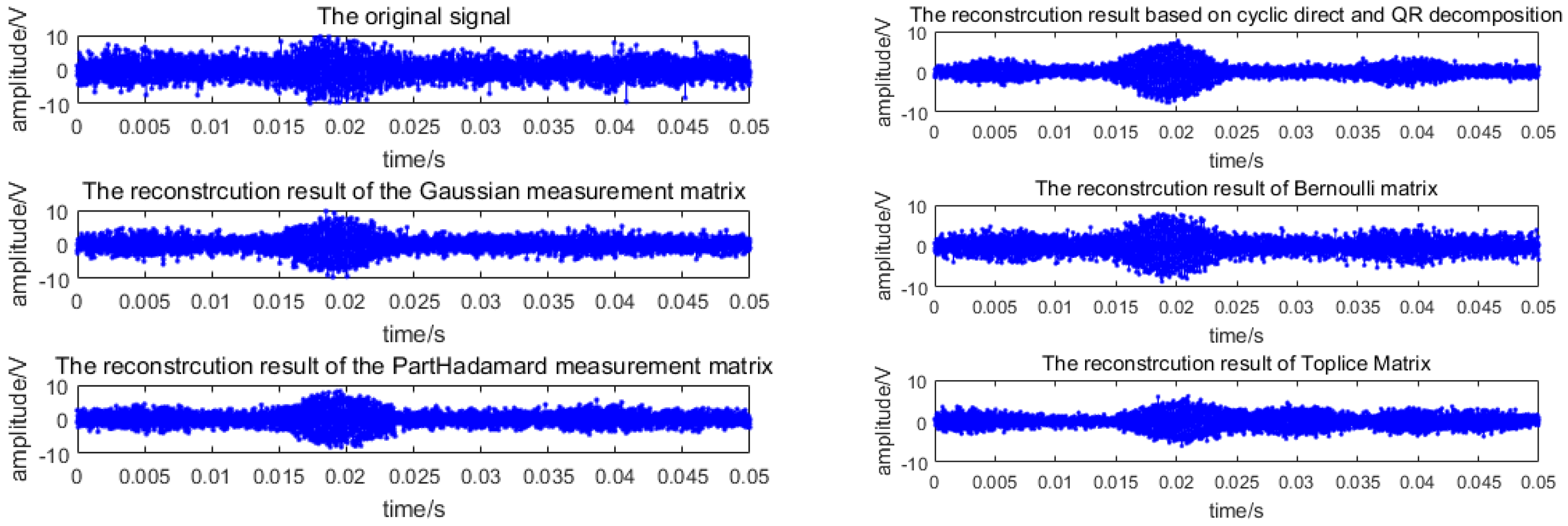
4.2. Simulation of Underwater Echo and Its Compression and Reconstruction
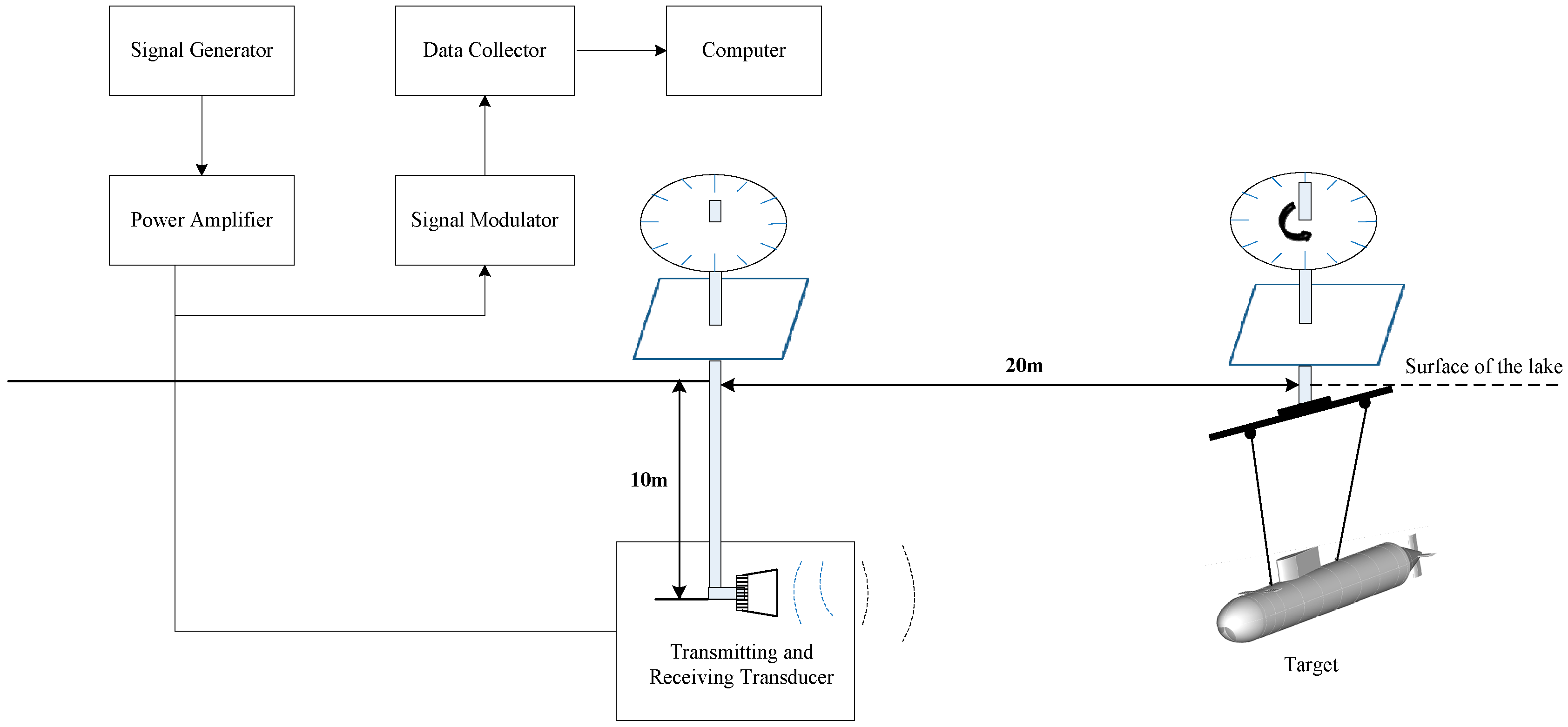
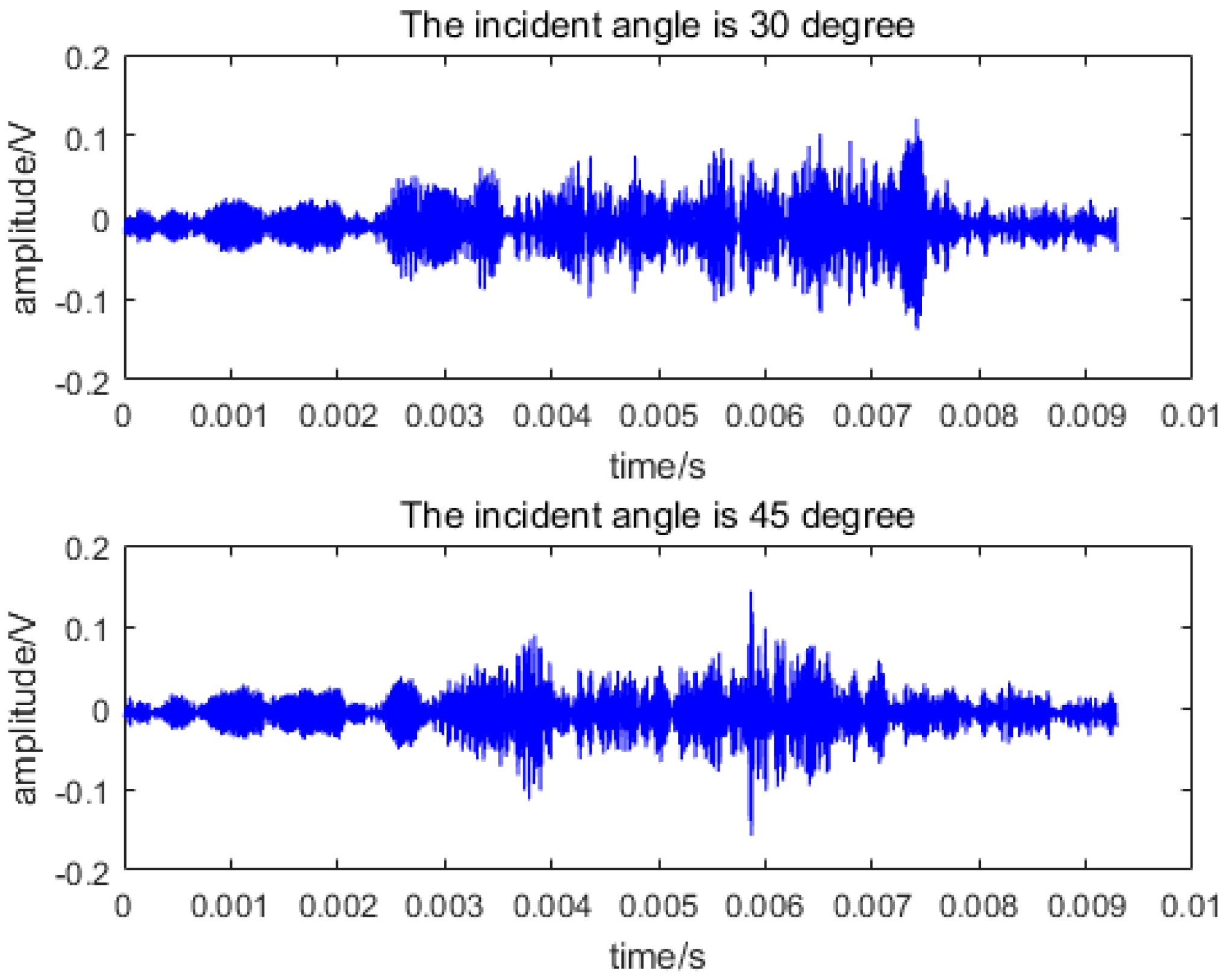
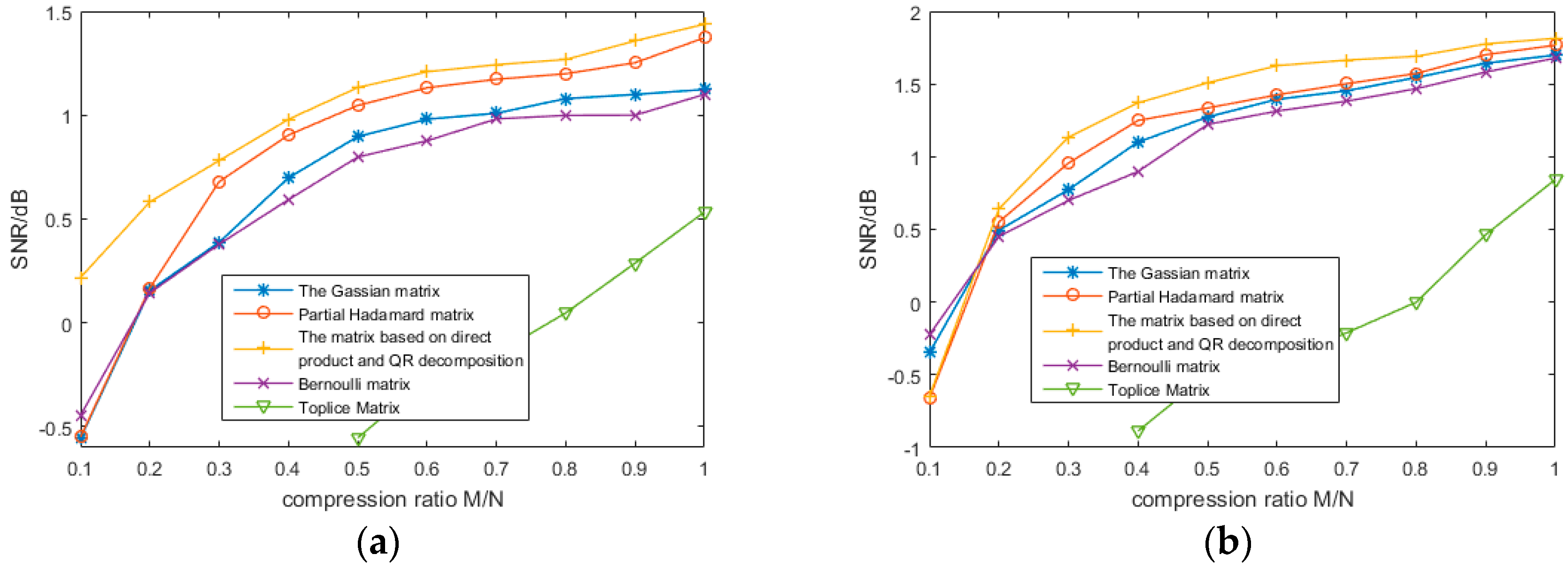
5. Testing the Performance of the Measurement Matrix Using Experimentally Measured Underwater Echo Data
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Donoho, D.L.; Javanmard, A.; Montanari, A. Information-theoretically optimal compressed sensing via spatial coupling and approximate message passing. IEEE Trans. Inf. Theory 2013, 59, 7434–7464. [Google Scholar] [CrossRef]
- Candès, E.J.; Romberg, J.; Tao, T. Robust uncertainty principles: Exact signal reconstruction from highly incomplete frequency information. IEEE Trans. Inf. Theory 2006, 52, 489–509. [Google Scholar] [CrossRef]
- Candès, E.J.; Tao, T. Near-optimal signal recovery from random projections: Universal encoding strategies. IEEE Trans. Inf. Theory 2006, 52, 5406–5425. [Google Scholar] [CrossRef]
- Aksoylar, C.; Atia, G.K.; Saligrama, V. Sparse signal processing with linear and nonlinear observations: A unified shannon-theoretic approach. IEEE Trans. Inf. Theory 2017, 63, 749–776. [Google Scholar] [CrossRef]
- Lustig, M.; Donoho, D.; Pauly, J.M. Sparse MRI: The application of compressed sensing for rapid MR imaging. Magn. Reson. Med. 2007, 58, 1182–1195. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Huang, X.S.; Dai, Q.F.; Cao, Y.Q. Compressive sensing image fusion algorithm based on wavelet sparse basis. Appl. Res. Comput. 2012, 29, 3581–3583. [Google Scholar]
- Zhou, X.; Wang, W.; Liu, R.A. Compressive sensing image fusion algorithm based on direction lets. EURASIP J. Wirel. Commun. Netw. 2014, 1, 1–6. [Google Scholar]
- Wright, J.; Ma, Y.; Mairal, J. Sparse representation for computer vision and pattern recognition. Proc. IEEE 2010, 98, 1031–1044. [Google Scholar] [CrossRef]
- Wei, C.P.; Chen, C.F.; Wang, Y.C. Robust face recognition with structurally incoherent low-rank matrix decomposition. IEEE Trans. Image Process. 2014, 23, 3294–3307. [Google Scholar]
- Herman, M.A.; Strohmer, T. High-resolution radar via compressed sensing. IEEE Trans. Signal Process. 2008, 57, 2275–2284. [Google Scholar] [CrossRef]
- Wang, R.; Liu, G.; Kang, W.; Li, B.; Ma, R.; Zhu, C. Bayesian compressive sensing based optimized node selection scheme in underwater sensor networks. Sensors 2018, 18, 2568. [Google Scholar] [CrossRef]
- Hong, F.; Nian, W.; Quanbing, Z. Approach of image reconstruction based on sparse Bayesian learning. Chin. J. Image Graph. 2009, 14, 1064–1069. [Google Scholar]
- Boyali, A.; Kavakli, M. A robust gesture recognition algorithm based on sparse representation, random projections and compressed sensing. In Proceedings of the 2012 7th IEEE Conference on Industrial Electronics and Applications (ICIEA), Singapore, 18–20 July 2012; pp. 243–249. [Google Scholar]
- Mo, Q. A new method on deterministic construction of the measurement matrix in compressed sensing. arXiv, 2015; arXiv:1503.01250. [Google Scholar]
- Li, Z.L.; Chen, H.J.; Chang, Y. Compressed sensing reconstruction algorithm based on spectral projected gradient pursuit. Acta Autom. Sin. 2012, 38, 12–18. [Google Scholar] [CrossRef]
- Wang, R.; Zhang, J.; Ren, S. A reducing iteration orthogonal matching pursuit algorithm for compressive sensing. J. Tsinghua Univ. 2016, 21, 71–79. [Google Scholar] [CrossRef]
- Han, H.; Gan, L.; Liu, S. A novel measurement matrix based on regression model for block compressed sensing. J. Math. Imaging Vis. 2015, 51, 161–170. [Google Scholar] [CrossRef]
- Zhao, X.; Li, D. Improvement of Gauss random measurement matrix. Foreign Electron. Meas. Technol. 2017, 36, 25–29. [Google Scholar]
- Fang, H.; Zhang, Q.B. Method of image reconstruction based on very sparse random projection. Comput. Eng. Appl. 2007, 42, 25–27. [Google Scholar]
- Shaodong, L.I.; Yang, J.; Chen, W. Overview of radar imaging technique and application based on compressive sensing theory. J. Electron. Inf. Technol. 2016. [Google Scholar] [CrossRef]
- Boxue, H. Efficient recovery of block sparse signals by an improved algorithm of block-StOMP. J. Autom. 2017, 43, 1607–1618. [Google Scholar]
- Sun, J.M. Toeplitz matrix for compressed multipath channel sensing. Signal Process. 2012, 28, 879–885. [Google Scholar]
- Li, X.; Zhao, R.; Hu, S. Blocked polynomial deterministic matrix for compressed sensing. In Proceedings of the IEEE International Conference on Wireless Communications NETWORKING and Mobile Computing, Chengdu, China, 23–25 September 2010; pp. 1–4. [Google Scholar]
- Jia, T.; Chen, D.; Wang, J. Single-pixel color imaging method with a compressive sensing measurement matrix. Appl. Sci. 2018, 8, 1293. [Google Scholar] [CrossRef]
- Xiao, Y.; Gao, W.; Zhang, G. Compressed sensing based apple image measurement matrix selection. Int. J. Distrib. Sens. Netw. 2015, 11, 139–150. [Google Scholar] [CrossRef]
- Davenport, M.A.; Wakin, M.B. Analysis of Orthogonal Matching Pursuit Using the Restricted Isometry Property. IEEE Trans. Inf. Theory 2010, 56, 4395–4401. [Google Scholar] [CrossRef] [Green Version]
- Kou, N.; Li, L.; Tian, S. Measurement matrix analysis and radiation improvement of a metamaterial aperture antenna for coherent computational imaging. Appl. Sci. 2017, 7, 933. [Google Scholar] [CrossRef]
- Sun, T.J.; Blondel, P.; Jia, B.; Li, G.J.; Gao, E.W. Compressive sensing method to leverage prior information for submerged target echoes. J. Acoust. Soc. Am. 2018, 144, 1406–1415. [Google Scholar] [CrossRef] [PubMed]
- David, L.; Donoho, D.L. Compressed sensing. IEEE Trans. Inf. Theory 2006, 52, 1289–1306. [Google Scholar]
- Duarte, M.F.; Baraniuk, R.G. Kronecker compressive sensing. IEEE Trans. Image Process. 2012, 21, 494–504. [Google Scholar] [CrossRef]
- Lin, X.L.; Jiang, Y.L. QR decomposition and algorithm for unitary symmetric matrix. Chin. J. Comput. 2005, 5, 817–822. [Google Scholar]
- Chen, X.; Li, Y.A.; Dong, Z.C. Submarine echo simulation method based on the highlight model. In Proceedings of the 2013 IEEE International Conference of IEEE Region 10 (TENCON 2013), Xi’an, China, 22–25 October 2013; pp. 1–4. [Google Scholar]
- Chen, B.; Wang, H.X.; Cheng, L.Z. Fast directional discrete cosine transforms based image compression. J. Softw. 2011, 22, 826–832. [Google Scholar] [CrossRef]
- Hongxia, B.U. Compressed sensing SAR imaging based on sparse representation in fractional Fourier domain. Sci. China (Inf. Sci.) 2012, 55, 1789–1800. [Google Scholar]
- Sheng, C.; Jiawei, Z.; Dahang, F. Improved regularized orthogonal matching tracking DOA estimation method. Acoust. J. 2014, 1, 35–41. [Google Scholar]
- Dai, Y.; He, D.; Fang, Y. Accelerating 2D orthogonal matching pursuit algorithm on GPU. J. Supercomput. 2014, 69, 1363–1381. [Google Scholar] [CrossRef]
- Hussain, Z.; Shawe-Taylor, J.; Hardoon, D.R. Design and generalization analysis of orthogonal matching pursuit algorithms. IEEE Trans. Inf. Theory 2011, 57, 5326–5341. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Compression Ratio | Gaussian Matrix | Partial Hadamard Matrix | Matrix Based on Cyclic Direct Product and QR Decomposition | Bernoulli Matrix | Toeplitz Matrix |
|---|---|---|---|---|---|
| 0.1 | 0.094 | 0.076 | 0.0374 | 0.083 | 0.038 |
| 0.2 | 0.116 | 0.106 | 0.0387 | 0.199 | 0.055 |
| 0.3 | 0.190 | 0.147 | 0.0398 | 0.293 | 0.071 |
| 0.4 | 0.218 | 0.152 | 0.0399 | 0.308 | 0.080 |
| 0.5 | 0.237 | 0.198 | 0.0414 | 0.517 | 0.096 |
| 0.6 | 0.317 | 0.204 | 0.0421 | 0.636 | 0.131 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, T.; Cao, H.; Blondel, P.; Guo, Y.; Shentu, H. Construction of Measurement Matrix Based on Cyclic Direct Product and QR Decomposition for Sensing and Reconstruction of Underwater Echo. Appl. Sci. 2018, 8, 2510. https://doi.org/10.3390/app8122510
Sun T, Cao H, Blondel P, Guo Y, Shentu H. Construction of Measurement Matrix Based on Cyclic Direct Product and QR Decomposition for Sensing and Reconstruction of Underwater Echo. Applied Sciences. 2018; 8(12):2510. https://doi.org/10.3390/app8122510
Chicago/Turabian StyleSun, Tongjing, Hong Cao, Philippe Blondel, Yunfei Guo, and Han Shentu. 2018. "Construction of Measurement Matrix Based on Cyclic Direct Product and QR Decomposition for Sensing and Reconstruction of Underwater Echo" Applied Sciences 8, no. 12: 2510. https://doi.org/10.3390/app8122510