
Impact of the Chaotic Synchronization’s Stability on the Performance of QCPSK Communication System

 ,
,  , ,
, , 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
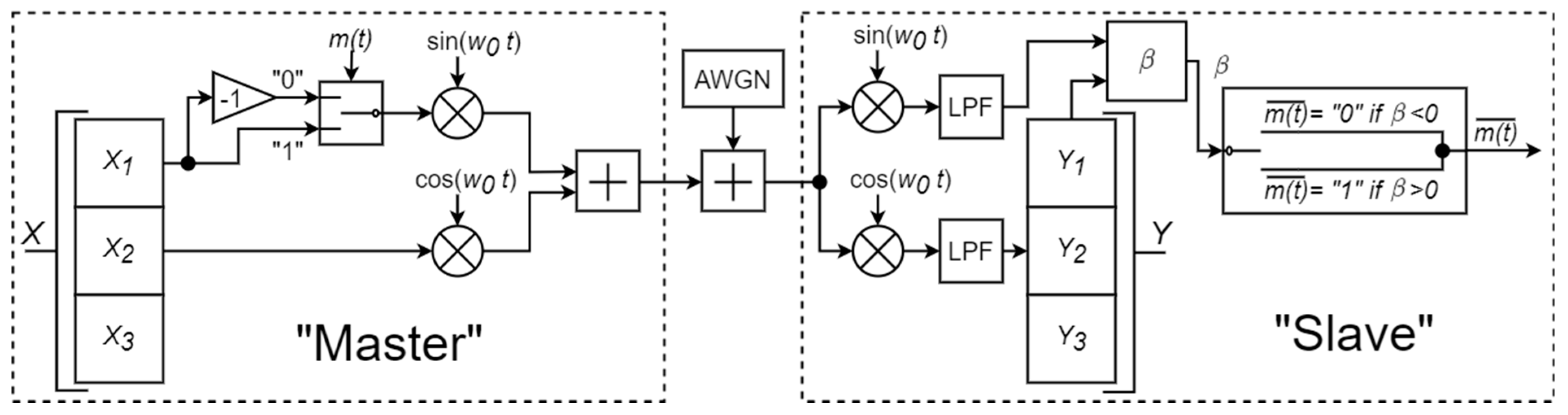
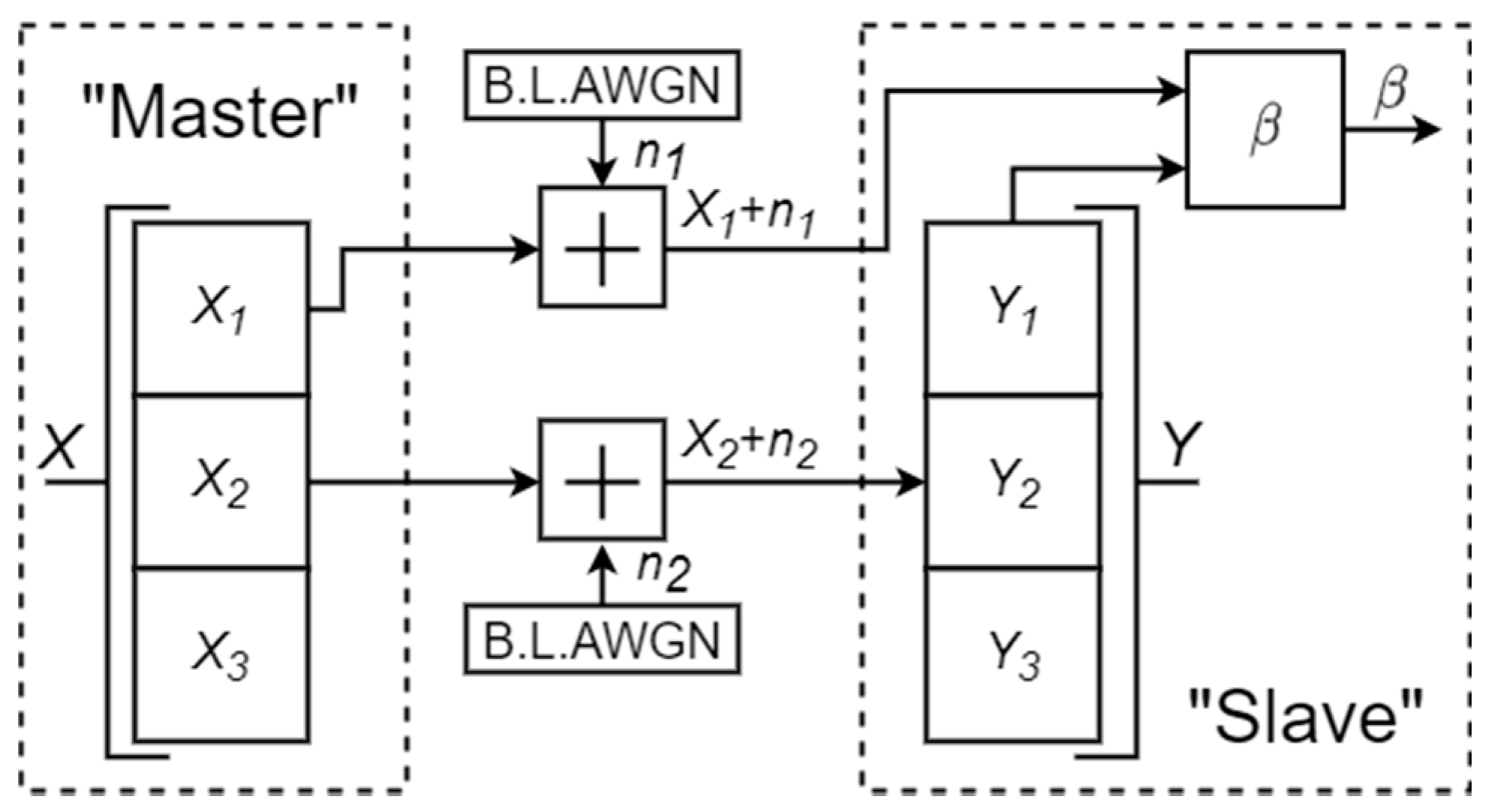
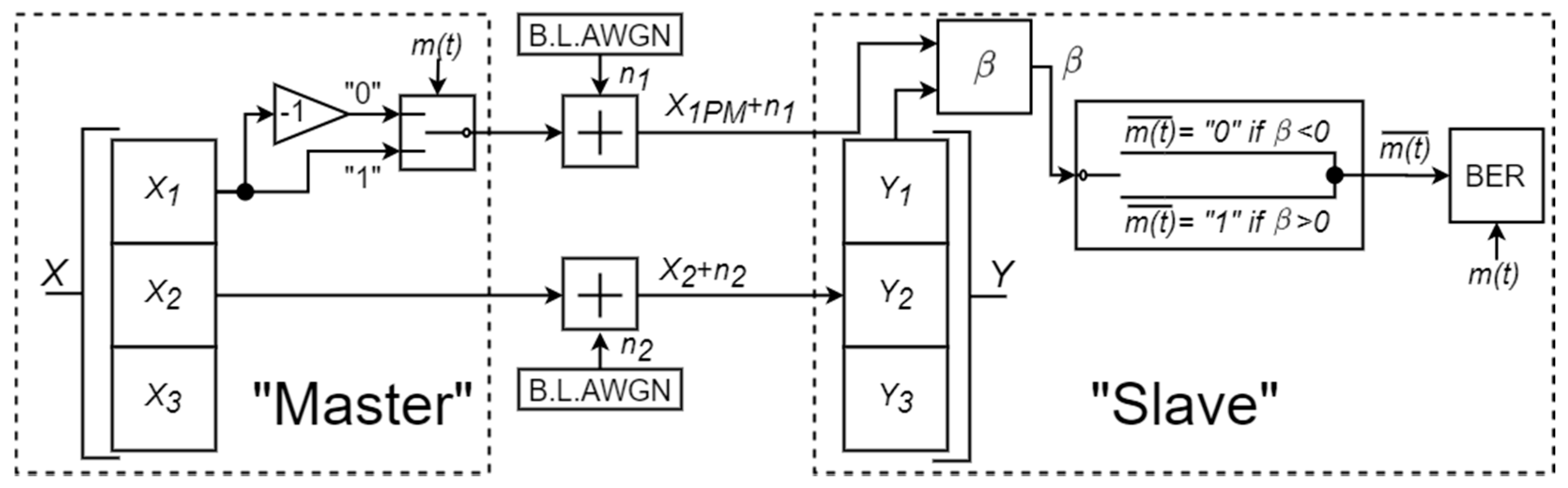
2. Communication System Based on Quadrature Chaos Phase-Shift Keying
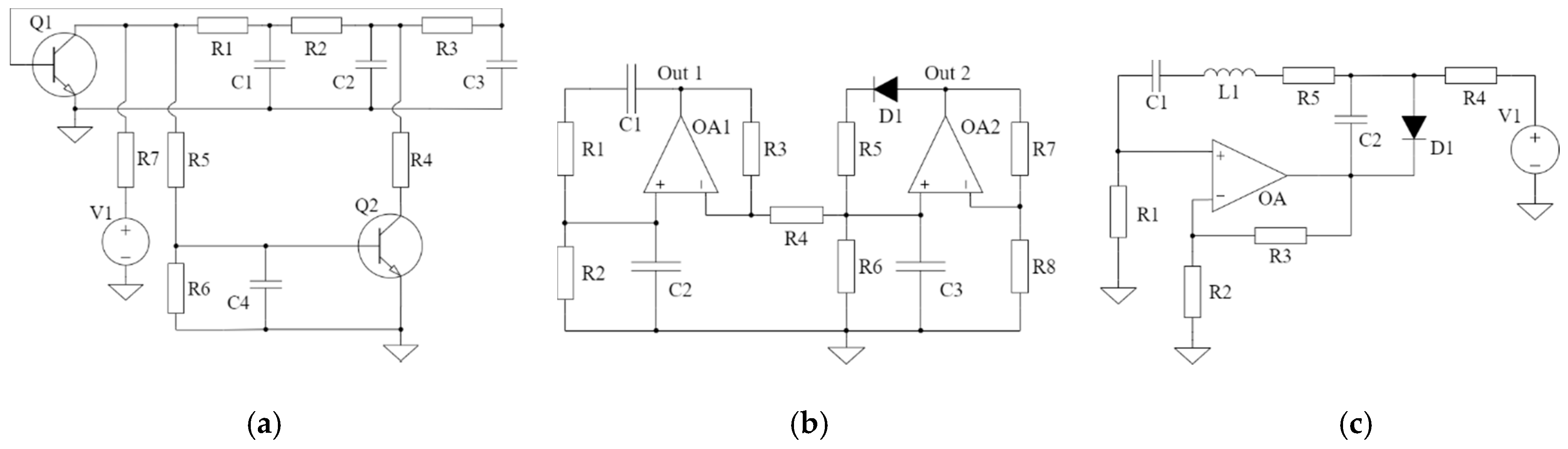
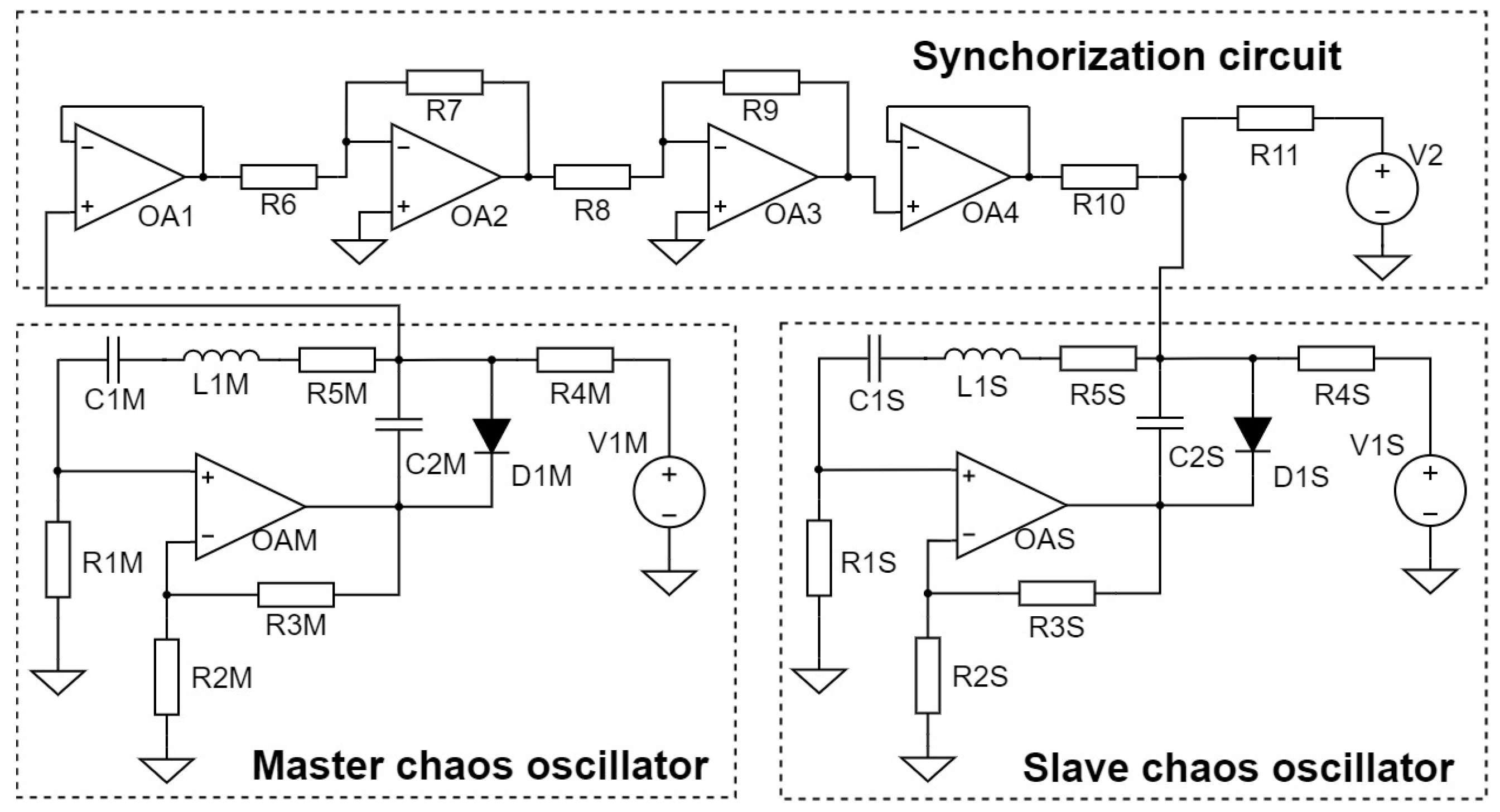
3. Chaos Oscillators
4. Study of the Properties of Chaos Oscillators
4.1. Simulation-Based Study
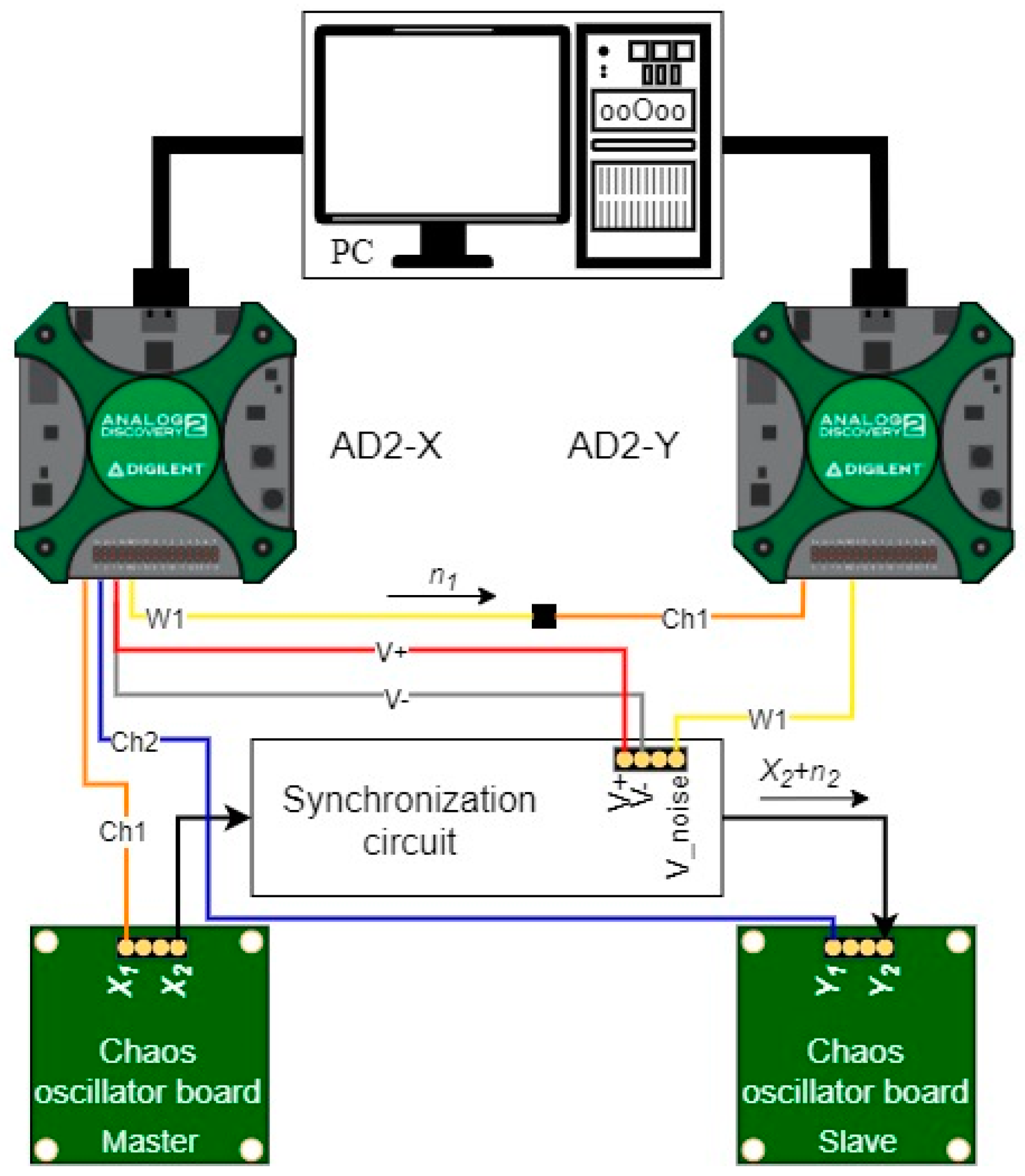
4.2. Hardware-Based Study
4.3. Result Analysis
5. Performance of the Communication System
5.1. Simulation-Based Study
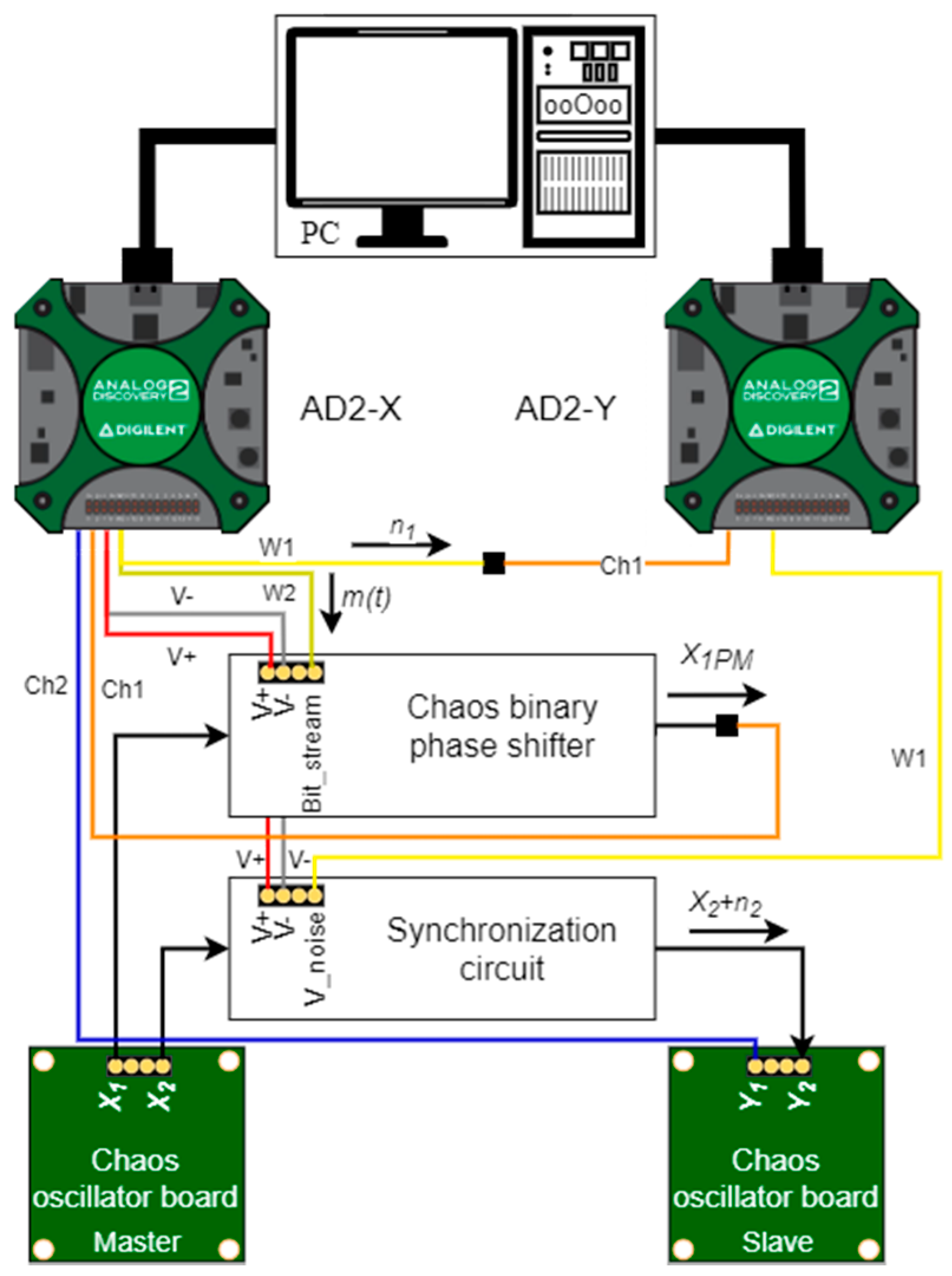
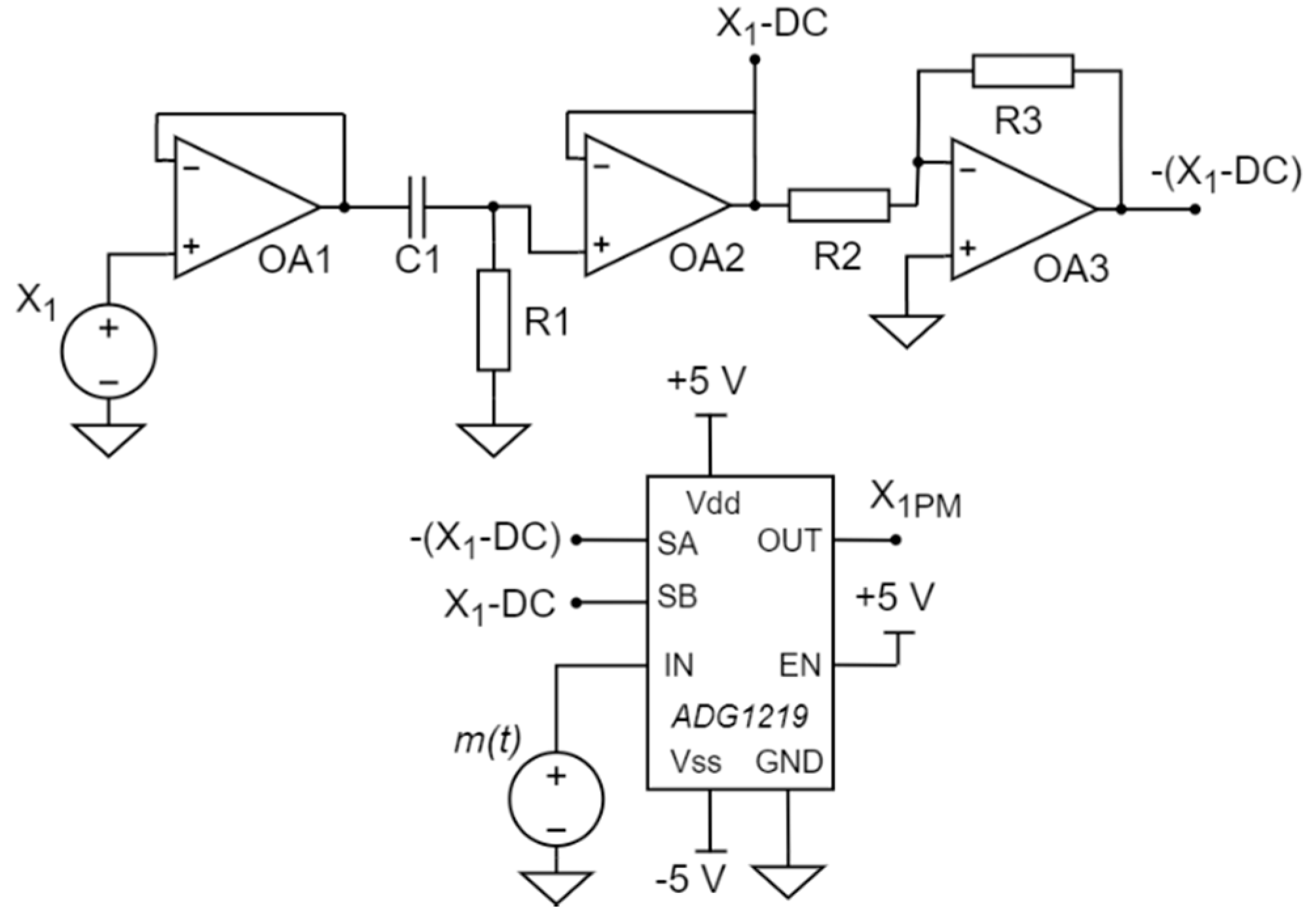
5.2. Hardware-Based Study
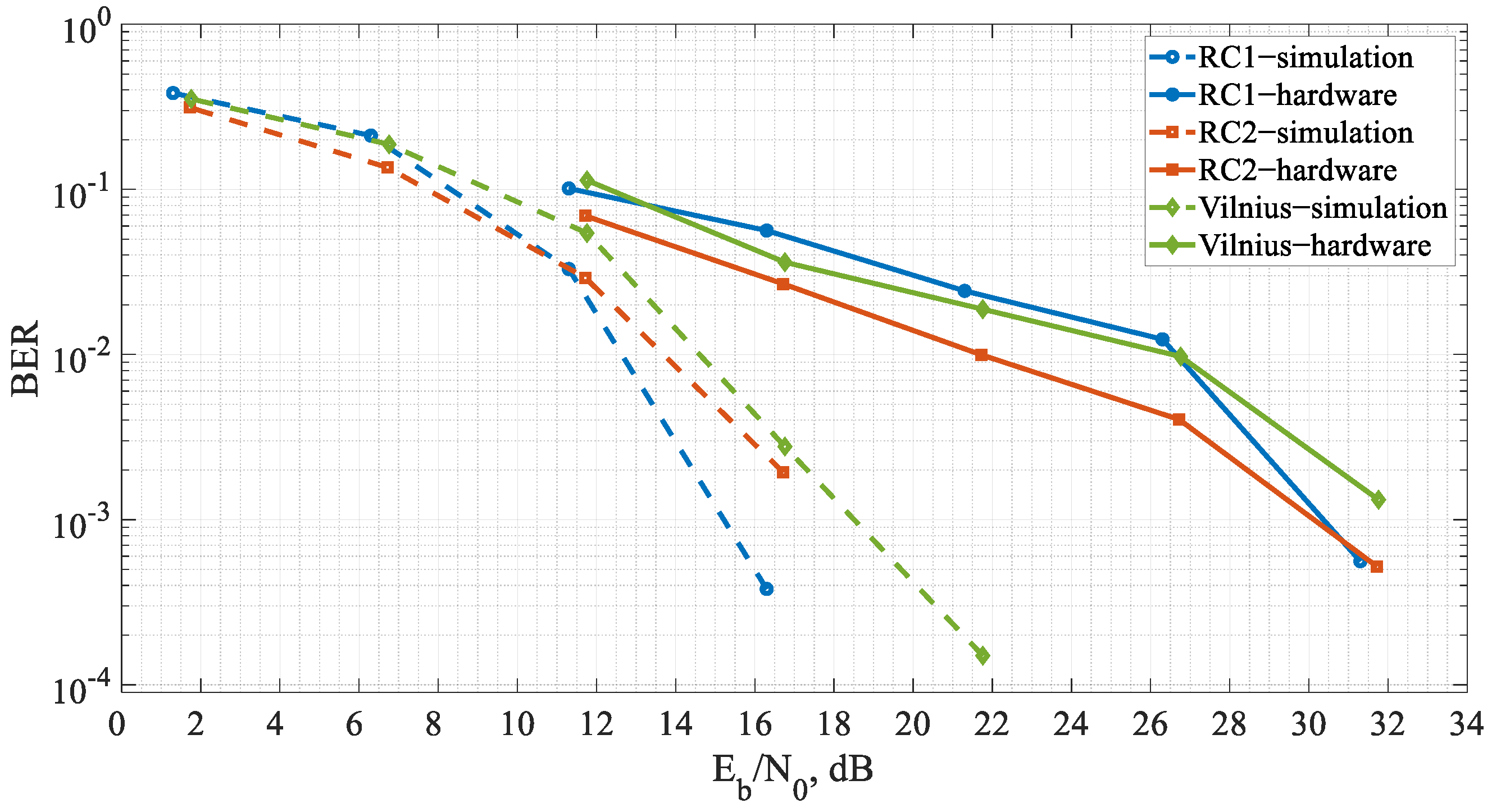
5.3. Result Analysis
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Dorogovs, P.; Romanovs, A. E-Service Security Challenges: Availability, Integrity, Confidentiality. Balt. J. Mod. Comput. 2016, 4, 68. [Google Scholar]
- Romanovs, A.; Soshko, O.; Merkuryev, Y. Information technology focused training in logistics. In Proceedings of the 2010 9th International Conference on Information Technology Based Higher Education and Training, Cappadocia, Turkey, 29 April–1 May 2010. [Google Scholar]
- Litvinenko, A.; Aboltins, A.; Pikulins, D.; Ahrens, A.; Capligins, F.; Eidaks, J. Advanced Chaos Shift Keying Based on a Modified Chua’s Circuit. In Proceedings of the 2019 IEEE Microwave Theory and Techniques in Wireless Communications, Riga, Latvia, 1–2 October 2019. [Google Scholar]
- Anstrangs, D.D.; Cirjulina, D.; Babajans, R.; Tjukovs, S.; Litvinenko, A. Encoded Chaos Shift Keying Communication System. In Proceedings of the 2020 IEEE Microwave Theory and Techniques in Wireless Communications (MTTW), Riga, Latvia, 1–2 October 2020. [Google Scholar]
- Zhu, S.; Xu, Y.; Yin, K. Design of a quadrature differential chaotic phase shift keying communication system. In Proceedings of the International Conference on Networks Security, Wireless Communications and Trusted Computing, Wuhan, China, 25–26 April 2009. [Google Scholar]
- Giurcăneanu, C.D.; Abeywickrama, R.V.; Berber, S. Performance analysis for a chaos-based code-division multiple access system in wide-band channel. J. Eng. 2015. [Google Scholar] [CrossRef]
- Mesloub, A.; Boukhelifa, A.; Merad, O.; Saddoudi, S.; Younsi, A.; Djeddou, M. Chip Averaging Chaotic ON-OFF Keying: A New Non-Coherent Modulation for Ultra Wide Band Direct Chaotic Communication. IEEE Commun. Lett. 2017. [Google Scholar] [CrossRef]
- Cai, X.; Xu, W.; Miao, M.; Wang, L. Design and Performance Analysis of a New M -Ary Differential Chaos Shift Keying with Index Modulation. IEEE Trans. Wirel. Commun. 2020. [Google Scholar] [CrossRef]
- Ma, H.; Cai, G.; Fang, Y.; Wen, J.; Chen, P.; Akhtar, S. A New Enhanced Energy-Detector-Based FM-DCSK UWB System for Tactile Internet. IEEE Trans. Ind. Inform. 2019. [Google Scholar] [CrossRef]
- Stavroulakis, P. Chaos Applications in Telecommunications; CRC Press: Boca Raton, FL, USA, 2005; ISBN 9780203025314. [Google Scholar]
- Liya, D.; Yonghong, H. Performance analysis for multiple access coherent chaos-shift-keying system. In Proceedings of the 5th International Conference on Wireless Communications, Networking and Mobile Computing, Beijing, China, 24–26 September 2009. [Google Scholar]
- Pandey, A.; Dahate, S. Secure communication using a modified chaotic masking scheme employing Sprott94 case a chaotic attractor. In Proceedings of the 2014 2nd International Conference on “Emerging Technology Trends in Electronics, Communication and Networking”, Surat, India, 26–27 December 2015. [Google Scholar]
- Tamaševičius, A.; Mykolaitis, G.; Pyragas, V.; Pyragas, K. A simple chaotic oscillator for educational purposes. Eur. J. Phys. 2005. [Google Scholar] [CrossRef] [Green Version]
- Namajunas, A.; Tamaševičius, A. Simple RC chaotic oscillator. Electron. Lett. 1996. [Google Scholar] [CrossRef]
- Keuninckx, L.; Van Der Sande, G.; Danckaert, J. Simple Two-Transistor Single-Supply Resistor—Capacitor Chaotic Oscillator. IEEE Trans. Circuits Syst. II Express Briefs 2015. [Google Scholar] [CrossRef]
- Babajans, R.; Anstrangs, D.D.; Cirjulina, D.; Litvinenko, A.; Pudzs, M. Chaotic Synchronization for Data Transmission Systems. In Proceedings of the 2019 IEEE 7th IEEE Workshop on Advances in Information, Electronic and Electrical Engineering (AIEEE), Liepaja, Latvia, 15–16 November 2019. [Google Scholar]
- Babajans, R.; Anstrangs, D.D.; Cirjulina, D.; Aboltins, A.; Litvinenko, A. Noise Immunity of Substitution Method—Based Chaos Synchronization in Vilnius Oscillator. In Proceedings of the 2020 IEEE Microwave Theory and Techniques in Wireless Communications (MTTW), Riga, Latvia, 1–2 October 2020. [Google Scholar]
- Kolumbán, G.; Kennedy, M.P.; Chua, L.O. The role of synchronization in digital communications using chaos—PART II: Chaotic modulation and chaotic synchronization. IEEE Trans. Circuits Syst. I Fundam. Theory Appl. 1998. [Google Scholar] [CrossRef] [Green Version]
- Chua, L.O.; Itoh, M.; Kocarev, L.; Eckert, K. Chaos synchronization in chua’s circuit. J. Circuits Syst. Comput. 1993. [Google Scholar] [CrossRef]












Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Babajans, R.; Cirjulina, D.; Grizans, J.; Aboltins, A.; Pikulins, D.; Zeltins, M.; Litvinenko, A. Impact of the Chaotic Synchronization’s Stability on the Performance of QCPSK Communication System. Electronics 2021, 10, 640. https://doi.org/10.3390/electronics10060640
Babajans R, Cirjulina D, Grizans J, Aboltins A, Pikulins D, Zeltins M, Litvinenko A. Impact of the Chaotic Synchronization’s Stability on the Performance of QCPSK Communication System. Electronics. 2021; 10(6):640. https://doi.org/10.3390/electronics10060640
Chicago/Turabian StyleBabajans, Ruslans, Darja Cirjulina, Juris Grizans, Arturs Aboltins, Dmitrijs Pikulins, Maris Zeltins, and Anna Litvinenko. 2021. "Impact of the Chaotic Synchronization’s Stability on the Performance of QCPSK Communication System" Electronics 10, no. 6: 640. https://doi.org/10.3390/electronics10060640