
A Multi-Position Approach in a Smart Fiber-Optic Surveillance System for Pipeline Integrity Threat Detection

 , , ,
, , ,
Abstract
:1. Introduction
1.1. Related Work
1.2. Motivation and Organization of This Paper
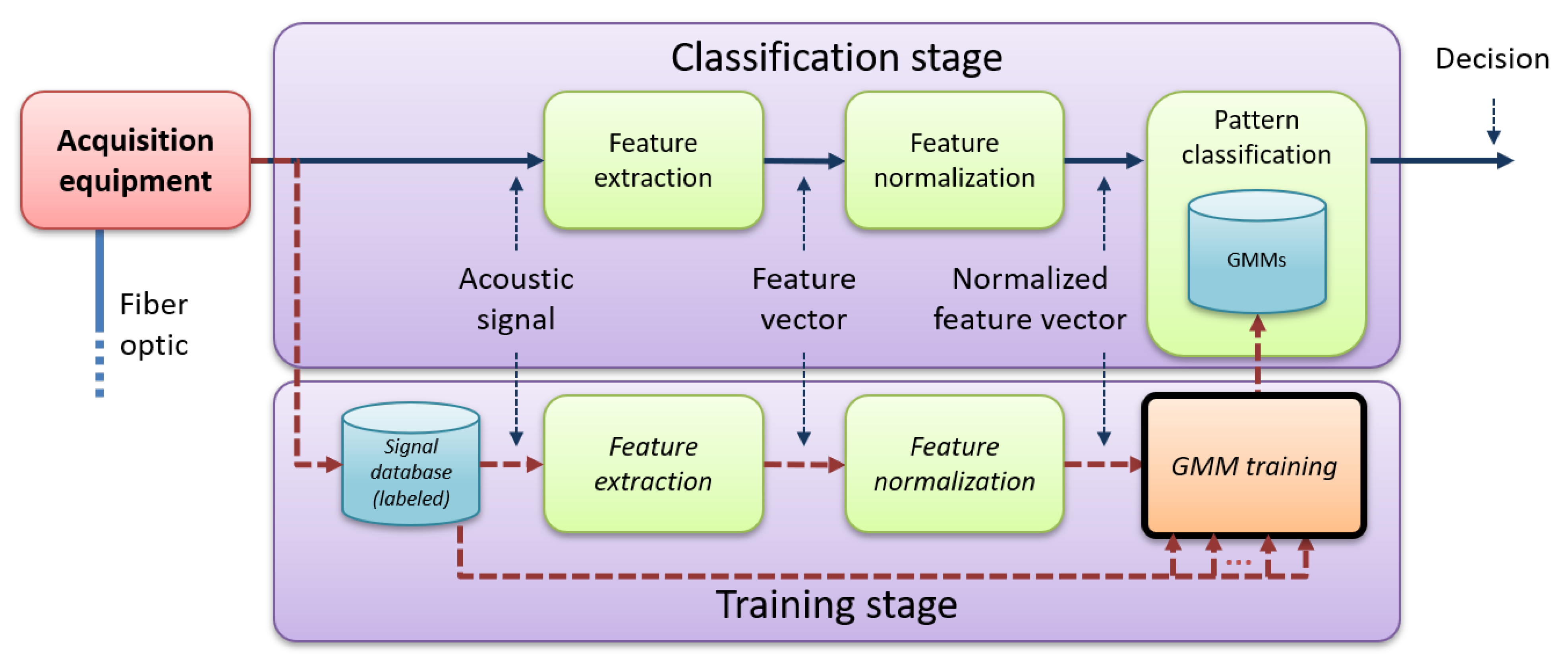
- A -OTDR sensor (named FINDAS) [78] for acoustic signal acquisition.
- Feature extraction that outputs the feature vectors with spectral information for acoustic signal representation.
- Feature vector normalization that employs the high-frequency content of the recorded signals.
- Pattern classification from a Gaussian mixture model (GMM) whose training was carried out from a single position for each recorded signal.
2. DAS + PRS: The Multi-Position Approach for Detecting Threats to the Pipeline Integrity
2.1. Distributed Acoustic Sensing: Acquisition Equipment
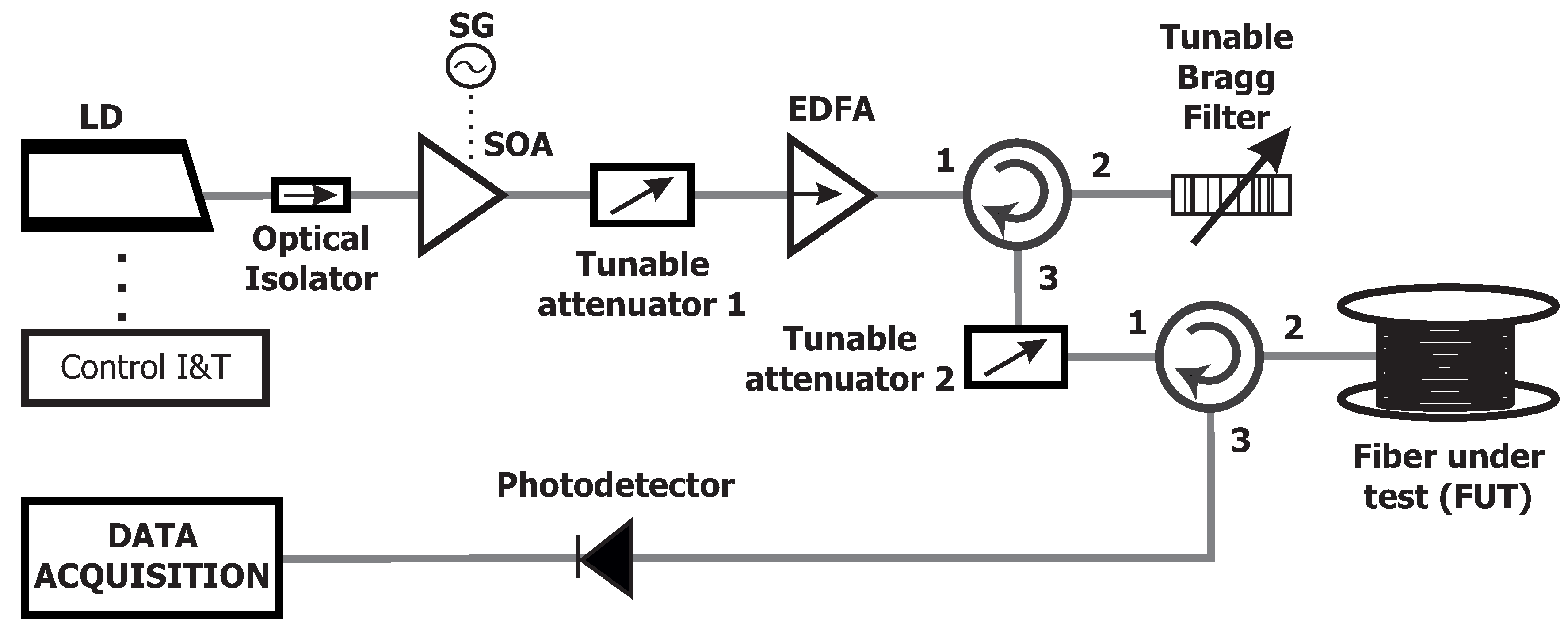
2.1.1. System Description
2.1.2. Signal Behavior
2.2. Feature Extraction
2.3. Feature Vector Normalization
2.4. Pattern Classification
2.4.1. Multi-Position Selection
2.4.2. Training
2.4.3. Classification
3. Experimental Procedure
3.1. Database Description
3.2. Evaluation Metrics
4. Experiments and Results
4.1. Computational Time Analysis
4.2. Comparison with Other Works
5. Discussion
- For the machine + activity identification mode, not all the machine + activity pairs get benefit from the use of multiple positions for GMM training. Results suggest that only the high energy and flat activities are effectively addressed with them. However, since suspicious activities for pipeline integrity are typically generated from high-energy events (i.e., sudden impacts to the pipeline or heavy machinery), the approach presented in this work is valid for addressing them. Concerning the activities that involve more than one single behavior, more research is needed to effectively detect them with the multi-position approach.
- For the threat detection mode, the use of multiple positions for GMM training does increase the accuracy. However, this is at the cost of missing real threats. Due to the FAR being reduced in a greater extent with respect to the TDR reduction (8% FAR vs. 6% TDR), we consider that this system mode is a valid approach for saving unnecessary work for the system operator while detecting three out of four real threats.
- As any supervised machine learning classification system (as the GMM approach presented in this work is, and as all the other approaches presented in the literature for DAS + PRS are), only the activities for which a model has been previously trained will be accurately detected. Although the threat detection mode is able to detect the threats produced by the activities carried out by the machines presented in Table 2, it was shown in [84] that the supervised strategy based on the GMM approach is able to work reasonably well for detecting threats produced by activities that have not been seen in the training stage due to the threat model generalization capability.
6. Conclusions and Future Work
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Trust, P.S. Nationwide Data on Reported Incidents by Pipeline Type (Gas Transmission, Gas Distribution, Hazardous Liquid). Available online: http://pstrust.org/about-pipelines/stats/accident/ (accessed on 24 February 2021).
- European Gas Pipeline Incident Data Group (EGIG). 7th EGIG-Report on Gas Pipeline Incidents (1970–2007); Technical Report; European Gas Pipeline Incident Data Group: Groningen, The Netherlands, 2008. [Google Scholar]
- Choi, K.N.; Juarez, J.C.; Taylor, H.F. Distributed fiber optic pressure/seismic sensor for low-cost monitoring of long perimeters. In Proceedings of the AEROSENSE, Orlando, FL, USA, 21–25 April 2003; pp. 134–141. [Google Scholar]
- Juarez, J.C.; Maier, E.W.; Choi, K.N.; Taylor, H.F. Distributed Fiber-Optic Intrusion Sensor System. J. Light. Technol. 2005, 23, 2081–2087. [Google Scholar] [CrossRef]
- Wang, Z.N.; Li, J.; Fan, M.Q.; Zhang, L.; Peng, F.; Wu, H.; Zeng, J.J.; Zhou, Y.; Rao, Y.J. Phase-sensitive optical time-domain reflectometry with Brillouin amplification. Opt. Lett. 2014, 39, 4313–4316. [Google Scholar] [CrossRef]
- Martins, H.F.; Martín-López, S.; Corredera, P.; Filograno, M.L.; Frazão, O.; González-Herráez, M. Phase-sensitive Optical Time Domain Reflectometer Assisted by First-order Raman Amplification for Distributed Vibration Sensing Over > 100 km. J. Light. Technol. 2014, 32, 1510–1518. [Google Scholar] [CrossRef]
- Martins, H.F.; Martin-Lopez, S.; Corredera, P.; Ania-Castañon, J.D.; Frazão, O.; Gonzalez-Herraez, M. Distributed vibration sensing over 125 km with enhanced SNR using ϕ-OTDR over a URFL cavity. J. Light. Technol. 2015, 33, 2628–2632. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z.; Zeng, J.; Li, J.; Fan, M.; Wu, H.; Peng, F.; Zhang, L.; Zhou, Y.; Rao, Y. Ultra-long phase-sensitive OTDR with hybrid distributed amplification. Opt. Lett. 2014, 39, 5866–5869. [Google Scholar] [CrossRef] [PubMed]
- Peng, F.; Wu, H.; Jia, X.H.; Rao, Y.J.; Wang, Z.N.; Peng, Z.P. Ultra-long high-sensitivity ϕ-OTDR for high spatial resolution intrusion detection of pipelines. Opt. Express 2014, 22, 13804–13810. [Google Scholar] [CrossRef]
- Juarez, J.C.; Taylor, H.F. Field test of a distributed fiber-optic intrusion sensor system for long perimeters. Appl. Opt. 2007, 46, 1968–1971. [Google Scholar] [CrossRef]
- Chao, P.; Hui, Z.; Bin, Y.; Zhu, Z.; Xiahoan, S. Distributed optical-fiber vibration sensing system based on differential detection of differential coherent-OTDR. In Proceedings of the IEEE Sensors, Taipei, Taiwan, 28–31 October 2012; pp. 1–3. [Google Scholar]
- Wang, Z.; Zeng, J.; Li, J.; Peng, F.; Zhang, L.; Zhou, Y.; Wu, H.; Rao, Y. 175 km Phase-sensitive OTDR with Hybrid Distributed Amplification. In Proceedings of the 23rd International Conference on Optical Fibre Sensors, Santander, Spain, 2–6 June 2014; Volume 9157, pp. 9157D5-1–9157D5-4. [Google Scholar]
- Shi, Y.; Feng, H.; Zeng, Z. A Long Distance Phase-Sensitive Optical Time Domain Reflectometer with Simple Structure and High Locating Accuracy. Sensors 2015, 15, 21957–21970. [Google Scholar] [CrossRef] [Green Version]
- He, M.; Feng, L.; Zhao, D. Application of distributed acoustic sensor technology in train running condition monitoring of the heavy-haul railway. Optik 2019, 181, 343–350. [Google Scholar] [CrossRef]
- Kowarik, S.; Hussels, M.T.; Chruscicki, S.; Munzenberger, S.; Lammerhirt, A.; Pohl, P.; Schubert, M. Fiber Optic Train Monitoring with Distributed Acoustic Sensing: Conventional and Neural Network Data Analysis. Sensors 2020, 20, 450. [Google Scholar] [CrossRef] [Green Version]
- Martins, H.F.; Martín-López, S.; Corredera, P.; Filograno, M.L.; Frazão, O.; González-Herráez, M. Coherent noise reduction in high visibility phase sensitive optical time domain reflectometer for distributed sensing of ultrasonic waves. J. Light. Technol. 2013, 31, 3631–3637. [Google Scholar] [CrossRef] [Green Version]
- Quin, Z.G.; Chen, L.; Bao, X.Y. Wavelet denoising method for improving detection performance of distributed vibration sensor. IEEE Photonics Technol. Lett. 2012, 24, 542–544. [Google Scholar] [CrossRef]
- Pan, Z.; Wang, Z.; Ye, Q.; Cai, H.; Qu, R.; Fang, Z. High sampling rate multi-pulse phase-sensitive OTDR employing frequency division multiplexing. In Proceedings of the 23rd International Conference on Optical Fibre Sensors, Santander, Spain, 2–6 June 2014; Volume 9157, pp. 91576X-1–91576X-4. [Google Scholar]
- Zhu, H.; Pan, C.; Sun, X. Vibration Pattern Recognition and Classification in OTDR Based Distributed Optical-Fiber Vibration Sensing System. In Proceedings of the SPIE Smart Structures and Materials + Nondestructive Evaluation and Health Monitoring, San Diego, CA, USA, 9–13 March 2014; Volume 9062, pp. 906205-1–906205-6. [Google Scholar]
- Wu, H.; Wang, Z.; Peng, F.; Peng, Z.; Li, X.; Wu, Y.; Rao, Y. Field test of a fully distributed fiber optic intrusion detection system for long-distance security monitoring of national borderline. In Proceedings of the 23rd International Conference on Optical Fibre Sensors, Santander, Spain, 2–6 June 2014; Volume 91579, pp. 915790-1–915790-4. [Google Scholar]
- Wu, H.; Li, X.; Peng, Z.; Rao, Y. A novel intrusion signal processing method for phase-sensitive optical time-domain reflectometry (ϕ-OTDR). In Proceedings of the 23rd International Conference on Optical Fibre Sensors, Santander, Spain, 2–6 June 2014; Volume 9157, pp. 9157O-1–9157O-4. [Google Scholar]
- Cao, C.; Fan, X.Y.; Liu, Q.W.; He, Z.Y. Practical Pattern Recognition System for Distributed Optical Fiber Intrusion Monitoring System Based on Phase-Sensitive Coherent OTDR. In Proceedings of the Asia Communications and Photonics Conference, Hong Kong, 19–23 October 2015; pp. 145:1–145:3. [Google Scholar]
- Sun, Q.; Feng, H.; Yan, X.; Zeng, Z. Recognition of a Phase-Sensitivity OTDR Sensing System Based on Morphologic Feature Extraction. Sensors 2015, 15, 15179–15197. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wu, H.; Xiao, S.; Li, X.; Wang, Z.; Xu, J.; Rao, Y. Separation and Determination of the Disturbing Signals in Phase-Sensitive Optical Time Domain Reflectometry (ϕ-OTDR). J. Light. Technol. 2015, 33, 3156–3162. [Google Scholar] [CrossRef]
- Wu, H.; Qian, Y.; Zhang, W.; Tang, C. Feature Extraction and Identification in Distributed Optical-Fiber Vibration Sensing System for Oil Pipeline Safety Monitoring. Photonic Sens. 2017, 7, 305–310. [Google Scholar] [CrossRef] [Green Version]
- Tejedor, J.; Martins, H.F.; Piote, D.; Macias-Guarasa, J.; Pastor-Graells, J.; Martin-Lopez, S.; Corredera, P.; Smet, F.D.; Postvoll, W.; Gonzalez-Herraez, M. Toward Prevention of Pipeline Integrity Threats using a Smart Fiber Optic Surveillance System. J. Light. Technol. 2016, 34, 4445–4453. [Google Scholar] [CrossRef] [Green Version]
- Tejedor, J.; Macias-Guarasa, J.; Martins, H.F.; Pastor-Graells, J.; Martin-Lopez, S.; Corredera, P.; Gonzalez-Herraez, M. A novel fiber optic based surveillance system for prevention of pipeline integrity threats. Sensors 2017, 17, 355. [Google Scholar] [CrossRef] [PubMed]
- Tejedor, J.; Macias-Guarasa, J.; Martins, H.F.; Martin-Lopez, S.; Gonzalez-Herraez, M. A Gaussian Mixture Model-Hidden Markov Model (GMM-HMM)-based fiber optic surveillance system for pipeline integrity threat detection. In Proceedings of the 26th International Conference on Optical Fiber Sensors, Lausanne, Switzerland, 24–28 September 2018; pp. WF36:1–WF36:4. [Google Scholar]
- Tejedor, J.; Macias-Guarasa, J.; Martins, H.; Martin-Lopez, S.; Gonzalez-Herraez, M. A contextual GMM-HMM smart fiber optic surveillance system for pipeline in-tegrity threat detection. J. Light. Technol. 2019, 37, 4514–4522. [Google Scholar] [CrossRef]
- Martins, H.F.; Piote, D.; Tejedor, J.; Macias-Guarasa, J.; Pastor-Graells, J.; Martin-Lopez, S.; Corredera, P.; Smet, F.D.; Postvoll, W.; Ahlen, C.H.; et al. Early Detection of Pipeline Integrity Threats using a SmarT Fiber-OPtic Surveillance System: The PIT-STOP Project. In Proceedings of the 24th International Conference on Optical Fibre Sensors, Curitiba, Brazil, 28 September–2 October 2015; Volume 9634, pp. 96347X-1–96347X-4. [Google Scholar]
- Conway, C.; Mondanos, M. An introduction to fibre optic Intelligent Distributed Acoustic Sensing (iDAS) technology for power industry applications. In Proceedings of the International Conference on Insulated Power Cables, Versailles, France, 21–25 June 2015; Volume A3.4, pp. 1–6. [Google Scholar]
- Tejedor, J.; Macias-Guarasa, J.; Martins, H.F.; Pastor-Graells, J.; Corredera, P.; Martin-Lopez, S. Machine Learning Methods for Pipeline Surveillance Systems based on Distributed Acoustic Sensing: A Review. Appl. Sci. 2017, 7, 841. [Google Scholar] [CrossRef] [Green Version]
- Huh, J.H. PLC-based design of monitoring system for ICT-integrated vertical fish farm. Hum. Centric Comput. Inf. Sci. 2017, 7, 20:1–20:19. [Google Scholar] [CrossRef] [Green Version]
- Huh, J.H.; Otgonchimeg, S.; Seo, K. Advanced metering infrastructure design and test bed experiment using intelligent agents: Focusing on the PLC network base technology for Smart Grid system. J. Supercomput. 2016, 72, 1862–1877. [Google Scholar] [CrossRef]
- Huh, J.H.; Seo, Y.S. Understanding Edge Computing: Engineering Evolution With Artificial Intelligence. IEEE Access 2019, 7, 164229–164245. [Google Scholar] [CrossRef]
- Deb, S.; Gao, X.Z.; Tammi, K.; Kalita, K.; Mahanta, P. Recent Studies on Chicken Swarm Optimization algorithm: A review (2014–2018). Artif. Intell. Rev. 2020, 53, 1737–1765. [Google Scholar] [CrossRef]
- Yinka-Banjo, C.O.; Akinyemi, M.I.; Nwadike, C.O.; Misra, S.; Oluranti, J.; Damasevicius, R. Unmanned Vehicle Model Through Markov Decision Process for Pipeline Inspection. In Proceedings of the International Conference on Deep Learning, Artificial Intelligence and Robotics (ICDLAIR 2019), Jaipur, India, 7–8 December 2019; pp. 317–329. [Google Scholar]
- Kumar, D.; Kubra, B.B.K.; Varsha, J.J.; Sah, V.R. Pipe inspection robot. Int. Res. J. Eng. Technol. 2020, 7, 57–63. [Google Scholar]
- Zhang, L.; Du, Y.; Cao, A. The Design of Natural Gas Pipeline Inspection Robot System. In Proceedings of the International Conference on Information and Automation, Lijiang, China, 8–10 August 2015; pp. 843–846. [Google Scholar]
- Gargade, A.; Ohol, S. Design and Development of In-pipe Inspection Robot for Various Pipe Sizes. In Proceedings of the International Conference on Robotics, Intelligent Automation and Control Technologies, Chennai, India, 2–3 October 2020; Volume 1012, pp. 1–11. [Google Scholar]
- Kesteloo, T.V. Autonomous Navigation for the Pipeline Inspection Robot “PIRATE”. Master’s Thesis, University of Twente, Enschede, The Netherlands, 2020. [Google Scholar]
- Karkoub, M.; Bouhali, O.; Sheharyar, A. Gas Pipeline Inspection Using Autonomous Robots with Omni-Directional Cameras. IEEE Sens. 2020. [Google Scholar] [CrossRef]
- Miro, V.J.; Ulapane, N.; Shi, L.; Hunt, D.; Behrens, M. Robotic pipeline wall thickness evaluation for dense nondestructive testing inspection. J. Field Robot. 2018, 35, 1293–1310. [Google Scholar] [CrossRef] [Green Version]
- Ambati, P.; Raj, K.M.S.; Joshuva, A. A review on pipeline inspection robot. AIP Conf. Proc. 2020, 2311, 60002:1–60002:7. [Google Scholar]
- Sifta, R.; Munster, P.; Sysel, P.; Horvath, T.; Novotny, V.; Krajsa, O.; Filka, M. Distributed fiber-optic sensor for detection and localization of acoustic vibrations. Metrol. Meas. Syst. 2015, XXII, 111–118. [Google Scholar] [CrossRef] [Green Version]
- Chafiq, Y.; Tatin, M.; Postaspana, O.; Paris, J.B.; Maraval, D.; Lamour, V. Fiber optic sensing for monitoring structure and health of railway infrastructures. In Proceedings of the 26th International Conference on Optical Fiber Sensors, Lausanne, Switzerland, 24–28 September 2018; pp. 1–4. [Google Scholar]
- Cedilnik, G.; Hunt, R.; Lees, G. Advances in Train and Rail Monitoring with DAS. In Proceedings of the 26th International Conference on Optical Fiber Sensors, Lausanne, Switzerland, 24–28 September 2018; pp. 1–4. [Google Scholar]
- Wang, Y.; Jin, B.; Wang, Y.; Wang, D.; Liu, X.; Bai, Q. Real-time distributed vibration monitoring system using ϕ-OTDR. IEEE Sens. 2017, 17, 1333–1341. [Google Scholar] [CrossRef]
- Hussels, M.T.; Chruscicki, S.; Arndt, D.; Scheider, S.; Prager, J.; Homann, T.; Habib, A.K. Localization of Transient Events Threatening Pipeline Integrity by Fiber-Optic Distributed Acoustic Sensing. Sensors 2019, 19, 3322. [Google Scholar] [CrossRef] [Green Version]
- Stajanca, P.; Chruscicki, S.; Homann, T.; Seifert, S.; Schmidt, D.; Habib, A. Detection of Leak-Induced Pipeline Vibrations Using Fiber-Optic Distributed Acoustic Sensing. Sensors 2018, 18, 2841. [Google Scholar] [CrossRef] [Green Version]
- Cong, C.; Xinyu, F.; Qingwen, L.; Zuyuan, H. Practical Pattern Recognition System for Distributed Optical Fiber Intrusion Monitoring Based on ϕ-COTDR. ZTE Commun. 2017, 15, 1–4. [Google Scholar]
- Yan, Q.; Yang, Y.; Zhang, Z.; Jiang, S.; Xu, Y.; Zhou, C. Distributed Vibration Sensing System for Oil and Gas Pipelines Based on COTDR and BP Neural Network. In Proceedings of the 26th International Conference on Optical Fiber Sensors, Lausanne, Switzerland, 24–28 September 2018; pp. 1–4. [Google Scholar]
- Jiang, F.; Li, H.; Zhang, Z.; Zhang, Y.; Zhang, X. Localization and Discrimination of the Perturbation Signals in Fiber Distributed Acoustic Sensing Systems Using Spatial Average Kurtosis. Sensors 2017, 18, 2839. [Google Scholar] [CrossRef] [Green Version]
- Liang, S.; Sheng, X.; Lou, S.; Feng, Y.; Zhang, K. Combination of Phase-Sensitive OTDR and Michelson Interferometer for Nuisance Alarm Rate Reducing and Event Identification. IEEE Photonics J. 2016, 8, 6802112:1–6802112:12. [Google Scholar] [CrossRef]
- Aktas, M.; Akgun, T.; Demircin, M.U.; Buyukaydin, D. Deep Learning Based Multi-threat Classification for Phase-OTDR Fiber Optic Distributed Acoustic Sensing Applications. In Proceedings of the SPIE Commercial + Scientific Sensing and Imaging, Anaheim, CA, USA, 9–13 April 2017; pp. 102080G:1–102080G:18. [Google Scholar]
- Wu, H.; Yang, M.; Yang, S.; Lu, H.; Wang, C.; Rao, Y. A novel DAS signal recognition method based on spatiotemporal information extraction with 1DCNNs-BiLSTM network. IEEE Access 2020, 8, 119448–119457. [Google Scholar] [CrossRef]
- Chen, J.; Wu, H.; Liu, X.; Xiao, Y.; Wang, M.; Yang, M.; Rao, Y. A real-time distributed deep learning approach for intelligent event recognition in long distance pipeline monitoring with DOFS. In Proceedings of the International Conference on Cyber-Enabled Distributed Computing and Knowledge Discovery (CyberC), Zhengzhou, China, 18–20 October 2018; pp. 290–296. [Google Scholar]
- Shi, Y.; Wang, Y.; Zhao, L.; Fan, Z. An Event Recognition Method for ϕ-OTDR Sensing System Based on Deep Learning. Sensors 2019, 19, 3421. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z.; Zheng, H.; Li, L.; Liang, J.; Wang, X.; Lu, B.; Ye, Q.; Qu, R.; Cai, H. Practical multi-class event classification approach for distributed vibration sensing using deep dual path network. Opt. Express 2019, 27, 23682–23692. [Google Scholar] [CrossRef]
- Bi, F.; Zheng, T.; Qu, H.; Pang, L. A Novel Fiber Optic Based Surveillance System for Prevention of Pipeline Integrity Threats. Photonic Sens. 2016, 6, 143–152. [Google Scholar] [CrossRef] [Green Version]
- Shiloh, L.; Eyal, A.; Giryes, R. Deep Learning Approach for Processing Fiber-Optic DAS Seismic Data. In Proceedings of the 26th International Conference on Optical Fiber Sensors, Lausanne, Switzerland, 24–28 September 2018; pp. 1–4. [Google Scholar]
- Zhaoyong, W.; Zhengqing, P.; Qing, Y.; Haiwen, C.; Ronghui, Q.; Zujie, F. Fast Pattern Recognition Based on Frequency Spectrum Analysis Used for Intrusion Alarming in Optical Fiber Fence. Chin. J. Lasers 2015, 42, 167–172. [Google Scholar]
- Xu, C.; Guan, J.; Bao, M.; Lu, J.; Ye, W. Pattern recognition based on enhanced multifeature parameters for vibration events in ϕ-OTDR distributed optical fiber sensing system. Microw. Opt. Technol. Lett. 2017, 59, 3134–3141. [Google Scholar] [CrossRef]
- Huang, X.; Zhang, H.; Liu, K.; Liu, T.; Wang, Y.; Ma, C. Hybrid Feature Extraction-Based Intrusion Discrimination in Optical Fiber Perimeter Security System. IEEE Photonics J. 2017, 9, 7800212:1–7800212:12. [Google Scholar] [CrossRef]
- Qu, H.; Zheng, T.; Pang, L.; Li, X. A new two-dimensional method to detect harmful intrusion vibrations for optical fiber pre-warning system. Optik 2016, 127, 4461–4469. [Google Scholar] [CrossRef]
- Yan, Z.; Shuqin, L.; Sheng, L.; Peng, W. Study of Pattern Recognition Based on Multi-Characteristic Parameters for ϕ-OTDR Distributed Optical Fiber Sensing System. Chin. J. Lett. 2015, 42. [Google Scholar]
- Jiang, F.; Li, H.; Zhang, Z.; Zhang, X. An event recognition method for fiber distributed acoustic sensing systems based on the combination of MFCC and CNN. In Proceedings of the International Conference on Optical Instruments and Technology, Beijing, China, 28–30 October 2017; pp. 10618:1–10618:7. [Google Scholar]
- Huang, L.; Li, Y.; Chen, S.; Zhang, Q.; Song, Y.; Zhang, J.; Wang, M. Building safety monitoring based on extreme gradient boosting in distributed optical fiber sensing. Opt. Fiber Technol. 2020, 55, 102149:1–102149:6. [Google Scholar] [CrossRef]
- Jia, H.; Liang, S.; Lou, S.; Sheng, X. A k-Nearest Neighbor Algorithm-Based Near Category Support Vector Machine Method for Event Identification of ϕ-OTDR. IEEE Sens. 2019, 19, 3683–3689. [Google Scholar] [CrossRef]
- Xu, C.; Guan, J.; Bao, M.; Lu, J.; Ye, W. Pattern recognition based on time-frequency analysis and convolutional neural networks for vibrational events in ϕ-OTDR. Opt. Eng. 2018, 57, 016103:1–016103:7. [Google Scholar] [CrossRef]
- Li, S.; Peng, R.; Liu, Z. A surveillance system for urban buried pipeline subject to third-party threats based on fiber optic sensing and convolutional neural network. Struct. Health Monit. 2020. [Google Scholar] [CrossRef]
- Wu, H.; Liu, X.; Xiao, Y.; Rao, Y. 1-D CNN based intelligent recognition of vibrations in pipeline monitoring with DAS. J. Light. Technol. 2019, 37, 4359–4366. [Google Scholar] [CrossRef]
- Wu, H.; Liu, X.; Xiao, Y.; Rao, Y. A Dynamic Time Sequence Recognition and Knowledge Mining Method Based on the Hidden Markov Models (HMMs) for Pipeline Safety Monitoring With ϕ-OTDR. J. Light. Technol. 2019, 37, 4991–5000. [Google Scholar] [CrossRef]
- Zhang, M.; Li, Y.; Chen, J.; Song, Y.; Zhang, J.; Wang, M. Event detection method comparison for distributed acoustic sensors using ϕ-OTDR. Opt. Fiber Technol. 2019, 52, 101980:1–101980:7. [Google Scholar] [CrossRef]
- Bai, Y.; Xing, J.; Xie, F.; Liu, S.; Li, J. Detection and identification of external intrusion signals from 33 km optical fiber sensing system based on deep learning. Opt. Fiber Technol. 2019, 53, 102060:1–102060:9. [Google Scholar] [CrossRef]
- Huang, X.D.; Zhang, H.J.; Liu, K.; Liu, T.G. Fully modelling based intrusion discrimination in optical fiber perimeter security system. Opt. Fiber Technol. 2018, 45, 64–70. [Google Scholar] [CrossRef]
- Peng, Z.; Wen, H.; Jian, J.; Gribok, A.; Wang, M.; Huang, S.; Liu, H.; Mao, Z.; Chen, K.P. Identifcations and classifcations of human locomotion using Rayleigh‑enhanced distributed fber acoustic sensors with deep neural networks. Sci. Rep. 2020, 10, 21014:1–21014:11. [Google Scholar] [CrossRef]
- FIber Network Distributed Acoustic Sensor (FINDAS). Available online: http://www.focustech.eu (accessed on 24 February 2021).
- Zhang, Y.; Alder, M.; Togneri, R. Using Gaussian mixture modeling in speech recognition. In Proceedings of the ICASSP IEEE International Conference on Acoustics, Speech and Signal Processing, Adelaide, SA, Australia, 19–22 April 1994; pp. 613–616. [Google Scholar]
- Permuter, H.; Francos, J.; Jermyn, I. A study of Gaussian mixture models of color and texture features for image classification and segmentation. Pattern Recognit. 2006, 39, 695–706. [Google Scholar] [CrossRef] [Green Version]
- Yu, T.; Zhang, C.; Cohen, M.; Ru, Y.; Wu, Y. Monocular Video Foreground/Background Segmentation by Tracking Spatial-Color Gaussian Mixture Models. In Proceedings of the Workshop on Motion and Video Computing, Austin, TX, USA, 23–24 February 2007; pp. 1–5. [Google Scholar]
- Kim, Y.; Jeong, S.; Kim, D.; López, T.S. An efficient scheme of target classification and information fusion in wireless sensor networks. Pers. Ubiquitous Comput. 2009, 13, 499–508. [Google Scholar] [CrossRef]
- Xuan, G.; Zhang, W.; Chai, P. EM algorithms of Gaussian mixture model and hidden Markov model. In Proceedings of the International Conference on Image Processing, Thessaloniki, Greece, 7–10 October 2001; pp. 145–148. [Google Scholar]
- Tejedor, J.; Macias-Guarasa, J.; Martins, H.F.; Pastor-Graells, J.; Martin-Lopez, S.; Corredera, P.; Pauw, G.D.; Smet, F.D.; Postvoll, W.; Ahlen, C.H.; et al. Real Field Deployment of a Smart Fiber Optic Surveillance System for Pipeline Integrity Threat Detection: Architectural Issues and Blind Field Test Results. J. Light. Technol. 2017, 36, 1052–1062. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| LOC1 | LOC2 | LOC3 | LOC4 | LOC5 | LOC6 | |
|---|---|---|---|---|---|---|
| Distance from FINDAS (km) | 22.24 | 22.49 | 23.75 | 27.43 | 27.53 | 34.27 |
| Ground condition | Grass & clay in agricultural field | Grass in agricultural field | Concrete, grass & clay Next to public street Private house nearby | Wet clay in agricultural field | Clay in agricultural field | Grass in forest |
| Weather condition | Sunny/cloudy | Sunny | Sunny | Rainy | Cloudy | Sunny |
| Machine | Activity | Duration in Each Location (in Seconds) | Threat Non-Threat | ||||||
|---|---|---|---|---|---|---|---|---|---|
| LOC1 | LOC2 | LOC3 | LOC4 | LOC5 | LOC6 | Total | |||
| Big excavator | Moving along the ground | 1100 | 1100 | 3540 | 1740 | 1620 | 4160 | 13,260 | Non-threat |
| Hitting the ground | 120 | 140 | 240 | 220 | 80 | 260 | 1060 | Threat | |
| Scrapping the ground | 460 | 460 | 920 | 620 | 200 | 580 | 3240 | Threat | |
| Small excavator | Moving along the ground | 600 | 500 | 1700 | 820 | 820 | 1660 | 6100 | Non-threat |
| Hitting the ground | 200 | 180 | 220 | 220 | 80 | 240 | 1140 | Threat | |
| Scrapping the ground | 420 | 340 | 780 | 360 | 180 | 520 | 2600 | Threat | |
| Pneumatic hammer | Compacting ground | 660 | 0 | 580 | 1320 | 0 | 1320 | 3880 | Non-threat |
| Plate compactor | Compacting ground | 740 | 0 | 740 | 1240 | 0 | 1680 | 4400 | Non-threat |
| Machine + Activity Identification | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| Big Excavator | Small Excavator | Pneumatic Hammer | Plate Compactor | Average Accuracy [740360] | |||||
| # Positions | Moving [275145] | Hitting [21995] | Scrapping [67230] | Moving [126575] | Hitting [23655] | Scrapping [53950] | Compacting [80510] | Compacting [91300] | |
| Threat Detection | |||
|---|---|---|---|
| # Positions | TDR [166830] | FAR [573530] | Accuracy [740360] |
| Recognized Class | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Big Excavator | Small Excavator | Pneumatic Hammer | Plate Compactor | |||||||||
| Moving | Hitting | Scrapping | Moving | Hitting | Scrapping | Compacting | Compacting | |||||
| Real class | Big excavator | [275145] | Moving | 49.1 | 13.8 | 12.8 |  | |||||
| [21995] | Hitting | 20.0 | 20.1 | 20.4 | 15.6 | |||||||
| [67230] | Scrapping | 26.0 | 20.4 | |||||||||
| Small excavator | [126575] | Moving | 13.2 | 50.5 | ||||||||
| [23655] | Hitting | 15.4 | 13.8 | 28.0 | 16.1 | |||||||
| [53950] | Scrapping | 16.8 | 14.3 | 30.2 | 16.1 | |||||||
| Pneumatic hammer | [80510] | Compacting | 71.8 | |||||||||
| Plate Compactor | [91300] | Compacting | 22.4 | 39.5 | ||||||||
| Recognized Class | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Big Excavator | Small Excavator | Pneumatic Hammer | Plate Compactor | |||||||||
| Moving | Hitting | Scrapping | Moving | Hitting | Scrapping | Compacting | Compacting | |||||
| Real class | Big excavator | [275145] | Moving | 55.7 | 22.1 |  | ||||||
| [21995] | Hitting | 23.5 | 31.9 | |||||||||
| [67230] | Scrapping | 17.5 | 21.1 | 19.7 | 16.3 | |||||||
| Small excavator | [126575] | Moving | 14.5 | 57.5 | ||||||||
| [23655] | Hitting | 15.8 | 12.7 | 26.0 | 16.8 | |||||||
| [53950] | Scrapping | 14.5 | 27.4 | 17.2 | ||||||||
| Pneumatic hammer | [80510] | Compacting | 72.6 | |||||||||
| Plate Compactor | [91300] | Compacting | 24.4 | 37.1 | ||||||||
| System Mode | Feat. Ext. + Norm. | Pattern Classification | Total |
|---|---|---|---|
| MAC | 140 | 80 (8 models) | 220 |
| TD | 140 | 20 (2 models) | 160 |
| Big Excavator | Small Excavator | Pneumatic Hammer | Plate Compactor | Accuracy | |||||
|---|---|---|---|---|---|---|---|---|---|
| Moving | Hitting | Scrapping | Moving | Hitting | Scrapping | Compacting | Compacting | ||
| [27] | |||||||||
| [28] | |||||||||
| [29] | |||||||||
| Baseline [26] | |||||||||
| This work | |||||||||
| Threat Detection | |||
|---|---|---|---|
| TDR | FAR | Accuracy | |
| [27] | |||
| [28] | |||
| [29] | |||
| [30] | |||
| Baseline [26] | |||
| This work | |||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tejedor, J.; Macias-Guarasa, J.; Martins, H.F.; Martin-Lopez, S.; Gonzalez-Herraez, M. A Multi-Position Approach in a Smart Fiber-Optic Surveillance System for Pipeline Integrity Threat Detection. Electronics 2021, 10, 712. https://doi.org/10.3390/electronics10060712
Tejedor J, Macias-Guarasa J, Martins HF, Martin-Lopez S, Gonzalez-Herraez M. A Multi-Position Approach in a Smart Fiber-Optic Surveillance System for Pipeline Integrity Threat Detection. Electronics. 2021; 10(6):712. https://doi.org/10.3390/electronics10060712
Chicago/Turabian StyleTejedor, Javier, Javier Macias-Guarasa, Hugo F. Martins, Sonia Martin-Lopez, and Miguel Gonzalez-Herraez. 2021. "A Multi-Position Approach in a Smart Fiber-Optic Surveillance System for Pipeline Integrity Threat Detection" Electronics 10, no. 6: 712. https://doi.org/10.3390/electronics10060712