Combined Harmonic Reduction and DC Voltage Regulation of A Single DC Source Five-Level Multilevel Inverter for Wind Electric System

 , , ,
, , ,  ,
,  and
and 
Abstract
:1. Introduction
2. Modeling of Wind PMSG System
2.1. Wind Turbine Model
2.2. PMSG
2.3. Diode Rectifier
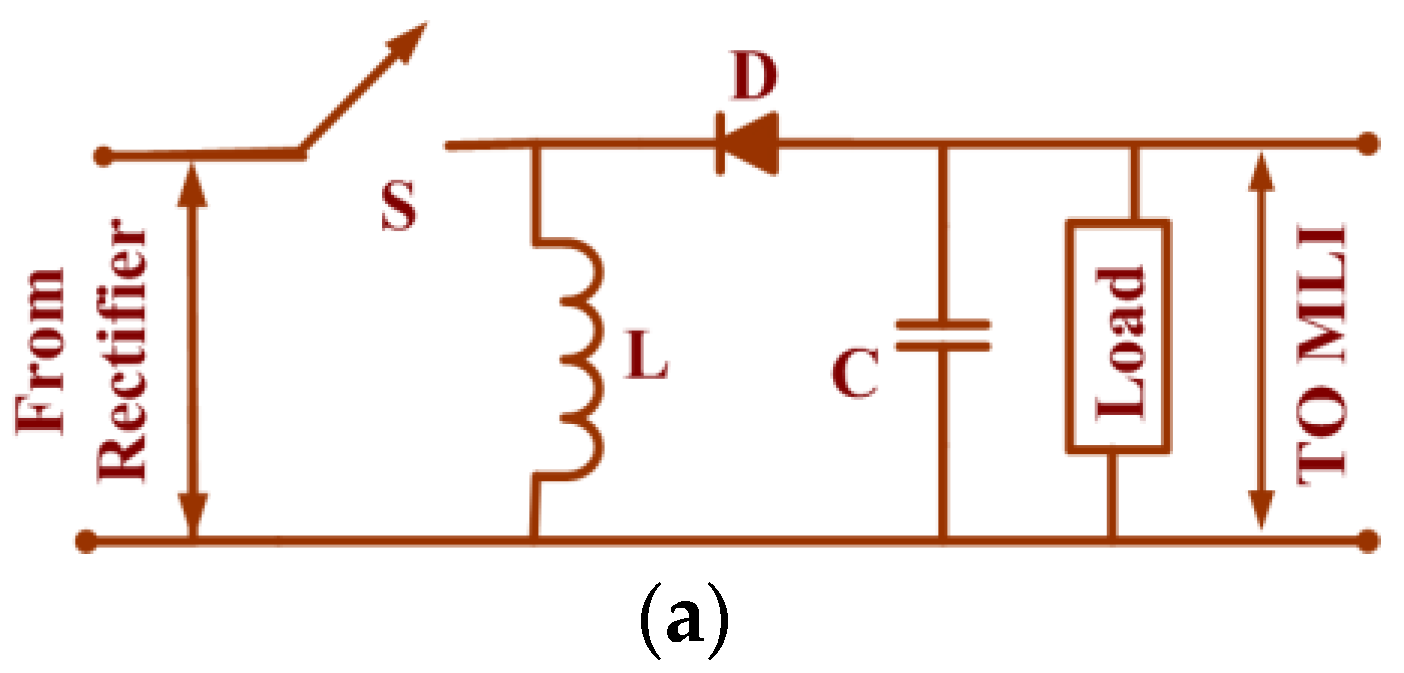
2.4. DC-DC Converter
2.4.1. Case (i) with a Buck-Boost Converter
2.4.2. Case (ii) with the Cuk Converter
2.5. PI Controller
- The system is run by keeping the integral gain (I) as zero. The value of proportional gain (P) is increased from zero to a value Pcr(critical)from zero until a constant magnitude oscillation is produced.
- This value of the P(Pcr) and the period of oscillation Tcr are calculated.
- The gains of the controller are found using Equations (26)–(28):
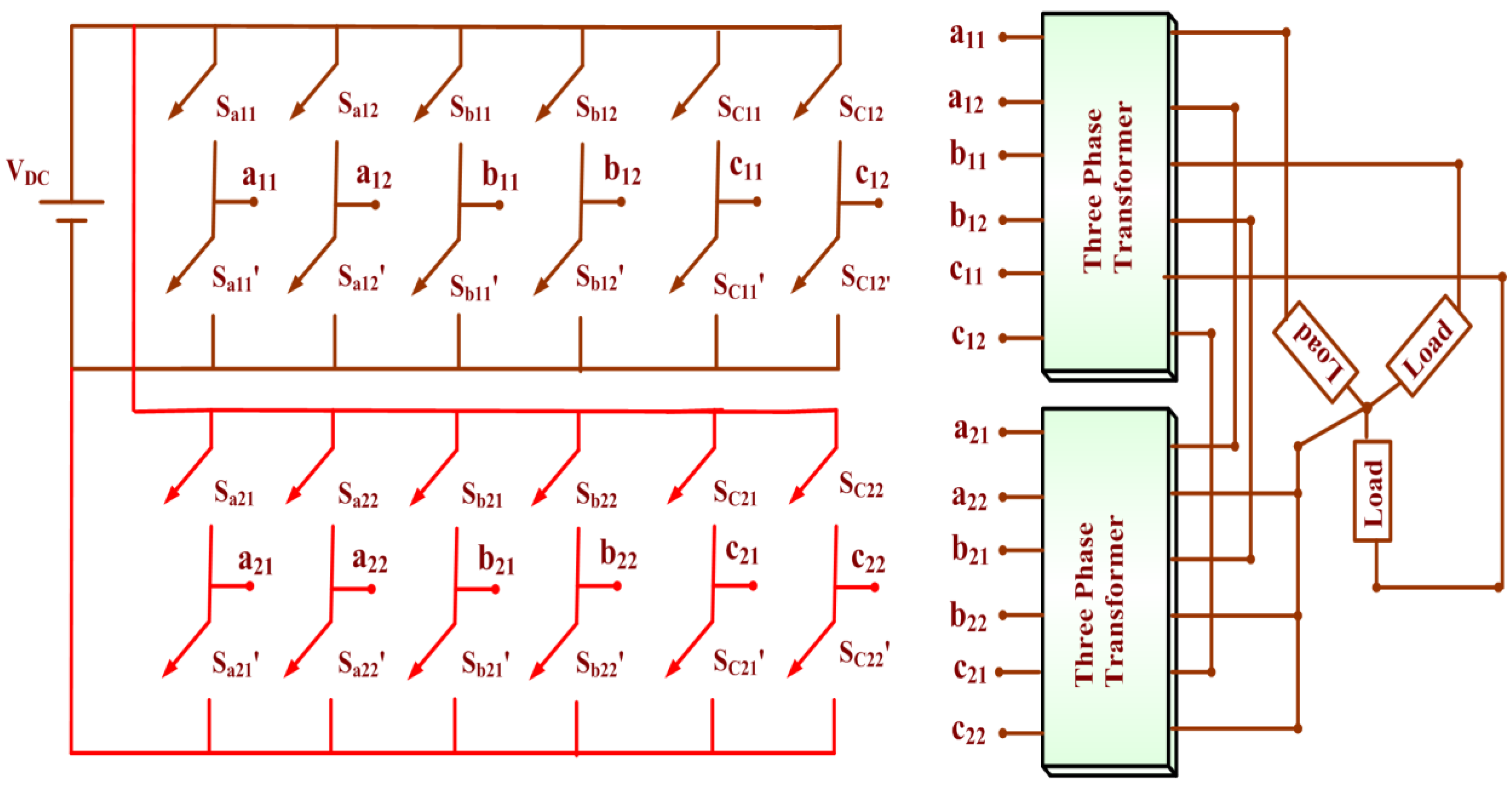
2.6. Five Level Converter
2.7. New Selective Harmonic Elimination
- Set initial values for ;
- Obtain the Fundamental and harmonic equations as ;
- Obtain ;
- Linearize the function ;
- Obtain the Jacobian matrix ;
- Obtain the new switching angle and repeat the procedure until the precise value is obtained;
- .
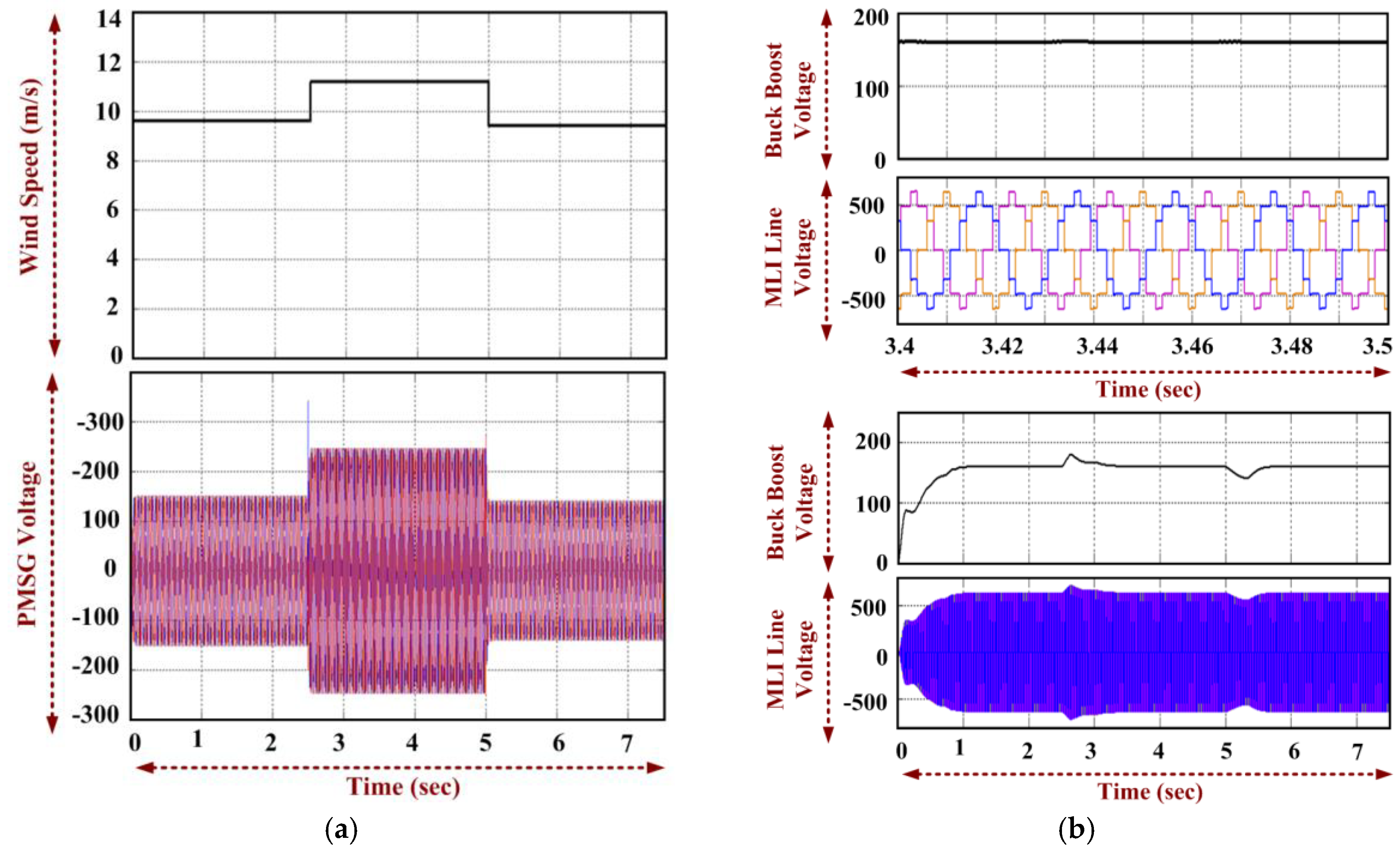
3. Simulation of the WES with DC-DC Converters and the Proposed CHB MLI
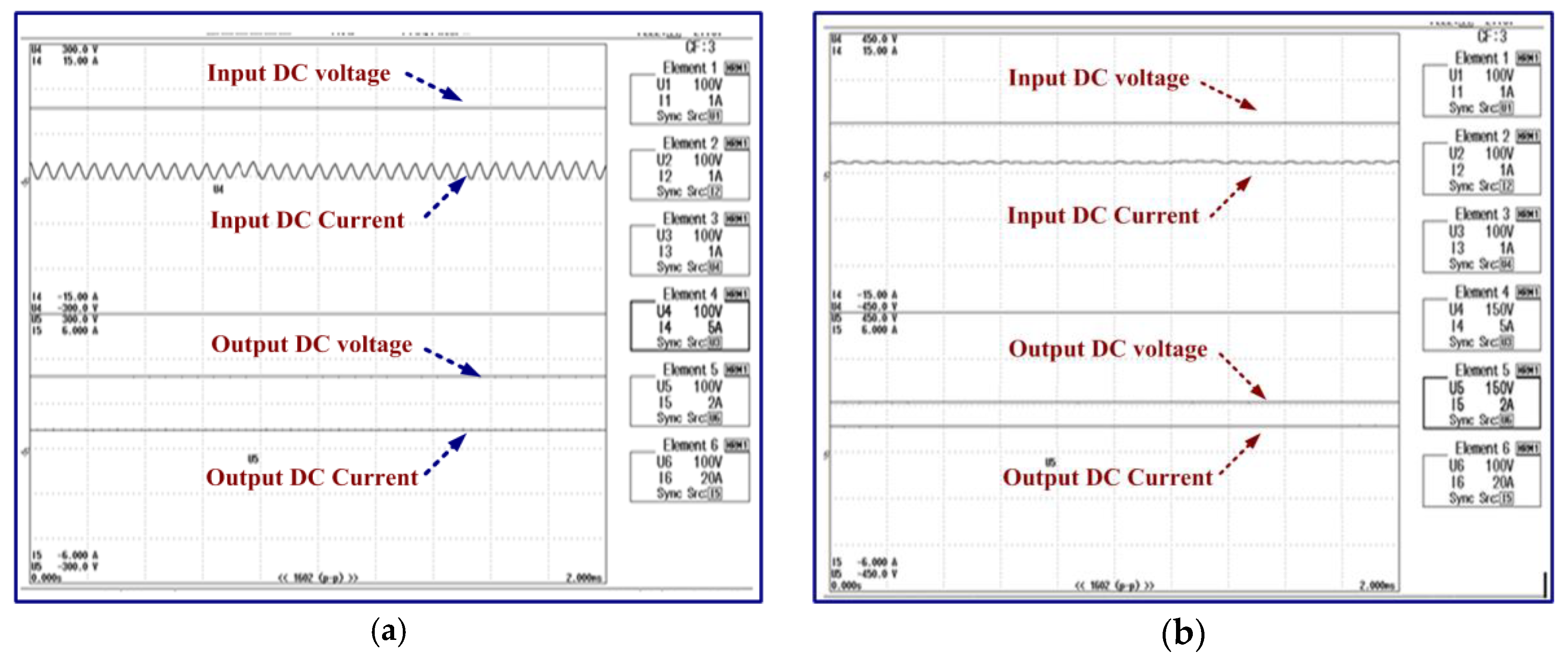
4. Hardware Implementation and Experimental Results
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclature
| PT | Power captured by the turbine |
| A | Swept area of the rotor blades |
| Ρ | Density of air |
| vw | velocity of wind |
| Cp s | Co-efficient of power |
| Pair | Total power in the wind |
| γ | Pitch angle |
| R | Radius of the turbine rotor |
| ωw | Rotor speed |
| f | Frequency of voltage induced |
| Nph | Per phase number of turns |
| φp | Flux per pole |
| Kw1 | Winding factor of the fundamental harmonic component |
| D and l | Diameter and length of the stator core |
| P | Number of pole pairs |
| Ia | Phase current |
| Xs | Synchronous reactance |
| Pem | Electrical output power |
| Pm | Mechanical input power |
| Pcu | Copper loss of stator |
| Prot | Rotational losses |
| Pcore | Core losses of the machine |
| ωe | Electrical speed |
| ψd, and ψq | d and q-axes flux linkages |
| vds, and vqs | Stator d and q axes voltages in the synchronously rotating reference frame |
| ids, and iqs | d and q axes stator currents in the synchronously rotating reference frame |
| Ld, and Lq | d and q-axes inductances |
| ψm | Permanent magnet flux linkage |
| p | Number of pairs of the pole |
| ωm | Mechanical speed of the rotor |
| Vs | Average output voltage of the diode rectifier |
| Vm | Peak value of the phase voltage of the PMSG |
| F | Switching frequency |
| ΔI | Inductor ripple current |
| ΔVo | Ripple voltage of the capacitor |
| Is | Input current (current from diode rectifier) |
| ΔVc1 and ΔVc2 | Ripple voltages of the capacitors C1 and C2 |
| ΔIL1 and ΔIL2 | Ripple currents of the inductors L1 and L2 |
| Tcr | The period of the oscillation |
| θ1 and θ2 | Switching angles |
Appendix A
| Simulation Parameter | Value | |
| Buck-boost converter | L, C | 50 mH, 330 μF |
| Switching frequency, duty cycle range | 18 kHz, 10–90% | |
| Cuk converter | L1, L2, C1, C2 | 50 mH, 1500 μH, 330 μF, 660 μF |
| Switching frequency, duty cycle range | 18 kHz, 10–90% | |
| Transformer ratings | kVA rating, turns ratio, voltage rating, current rating, frequency | 0.5 kVA, 1:1, 230 V/230 V, 2 A/2 A, 50 Hz |
| PI controller | kp, ki | 0.00045, 0.0035 |
| Time delay for PI action, sampling time | 5 ms, 0.05 s | |
| Load parameters | RLloads | 750 + j75.36 Ω |
References
- Sartika, L.; Rosyadi, M.; Umemura, A.; Takahashi, R.; Tamura, J. Stabilization of PMSG based Wind Turbine under Network Disturbance by using New Buck Controller System for DC-Link Protection. In Proceedings of the 5th IET International Conference on Renewable Power Generation, IET Digital Library, London, UK, 21–23 September 2016; pp. 1–6. [Google Scholar]
- Barote, L. Modeling and Operational Testing of an Isolated Variable Speed PMSG Wind Turbine with Battery Energy Storage. Adv. Electr. Comput. Eng. 2012, 12, 81–88. [Google Scholar] [CrossRef]
- Kumar, V.; Joshi, R.R.; Bansal, R.C. Optimal Control of Matrix-Converter-Based WECS for Performance Enhancement and Efficiency Optimization. IEEE Trans. Energy Convers. 2009, 24, 264–273. [Google Scholar] [CrossRef]
- Rodriguez, J.; Jih-Sheng, L.; Fang, Z.P. Multilevel inverters: A survey of topologies, controls, and applications. IEEE Trans. Ind. Electron. 2002, 49, 724–738. [Google Scholar] [CrossRef] [Green Version]
- Rodriguez, J.; Bernet, S.; Pontt, J.O.; Kouro, S. Multilevel Voltage-Source-Converter Topologies for Industrial Medium-Voltage Drives. IEEE Trans. Ind. Electron. 2007, 54, 2930–2945. [Google Scholar] [CrossRef]
- Zambra, D.A.B.; Rech, C.; Pinheiro, J.R. Comparison of Neutral-Point-Clamped, Symmetrical, and Hybrid Asymmetrical Multilevel Inverters. IEEE Trans. Ind. Electron. 2010, 57, 2297–2306. [Google Scholar] [CrossRef]
- Tudorache, T. Optimal Design Solutions for Permanent Magnet Synchronous Machines. Adv. Electr. Comput. Eng. 2011, 11, 77–82. [Google Scholar] [CrossRef]
- Ozcira, S.; Bekiroglu, N.; Oner, Y. Dynamic Analysis of Permanent Magnet Synchronous Generator with Power Electronics. Adv. Electr. Comput. Eng. 2010, 10, 11–15. [Google Scholar]
- Samuel, P.; Chandrashekhar, N.; Gupta, R. Wind energy conversion based on seven-level cascaded H-bridge inverter using LabVIEW FPGA. In Proceedings of the International Conference on Power, Control and Embedded Systems, Allahabad, India, 29 November–1 Decmber 2010; pp. 1–6. [Google Scholar]
- Boldea, I. The Electric Generator Hand Book Synchronous Generators; CRC Press, Taylor & Francis Group: New York, NY, USA, 2005. [Google Scholar]
- Porselvi, T.; Muthu, R. The PMSG based Wind Energy Conversion System with CUK Converter and CHB MLI with a Single DC Input. Int. Energy J. 2014, 14, 43–56. [Google Scholar]
- Sebastian, T.; Slemon, G.R. Transient modeling and performance of variable-speed permanent-magnet motors. IEEE Trans. Ind. Appl. 1989, 25, 101–106. [Google Scholar] [CrossRef]
- Porselvi, T.; Muthu, R. Seven level three phase Cascaded H-Bridge inverter with single DC source. ARPN J. Eng. Appl. Sci. 2012, 7, 1546–1554. [Google Scholar]
- Rashid, M.H. Power Electronics: Circuits, Devices, and Applications; Dorling Kindersley (India) Private Limited: Noida, India, 2007. [Google Scholar]
- Williums, B.W. Power Electronics: Devices, Drivers, Applications and Passive Components, 2nd ed.; McGraw Hill Higher Education: Burr Ridge, IL, USA, 1992. [Google Scholar]
- Basilio, J.C.; Matos, S.R. Design of PI and PID controllers with transient performance specification. IEEE Trans. Educ. 2002, 45, 364–370. [Google Scholar] [CrossRef]
- Urmila, B.; Subbarayudu, D. Multilevel Inverters-A Comparative Study of Pulse Width Modulation Techniques. Int. J. Sci. Eng. Res. 2010, 1, 5–11. [Google Scholar]
- Peng, F.Z.; McKeever, J.W.; Adams, D.J. Cascade multilevel inverters for utility applications. In Proceedings of the 23rd International Conference on Industrial Electronics, Control, and Instrumentation, New Orleans, LA, USA, 14 November 1997; pp. 437–442. [Google Scholar]
- Porselvi, T.; Muthu, R. Modeling and Control of the PMSG for the Wind Energy Conversion System with the CHB Inverter with the New Selective Harmonic Elimination Technique. Int. Rev. Model. Simul. IREMOS 2013, 6, 767–773. [Google Scholar]
- Jain, A.; Shankar, S.; Vanitha, V. Power Generation Using Permanent Magnet Synchronous Generator (PMSG) Based Variable Speed Wind Energy Conversion System (WECS): An Overview. J. Green Eng. 2017, 7, 477–504. [Google Scholar] [CrossRef] [Green Version]
- Smith, C.J.; Crabtree, C.J.; Matthews, P.C. Impact of wind conditions on thermal loading of PMSG wind turbine power converters. In Proceedings of the 8th IET International Conference on Power Electronics, Machines and Drives (PEMD-2016), Glasgow, UK, 19–21 April 2016; Volume 10, pp. 1–6. [Google Scholar]
- Carrara, G.; Gardella, S.; Marchesoni, S.; Sciutto, G. A new multilevel PWM method: A theoretical analysis. IEEE Trans. Power Electron. 1992, 7, 497–505. [Google Scholar] [CrossRef]
- Porselvi, T.; Deepa, K.; Muthu, R. FPGA Based Selective Harmonic Elimination Technique for Multilevel Inverter. Int. J. Power Electron. Drive Syst. 2018, 9, 166–173. [Google Scholar] [CrossRef]
- Prathiba, T.; Renuga, P. A comparative study of Total Harmonic Distortion in Multi level inverter topologies. J. Inf. Eng. Appl. 2012, 2, 26–36. [Google Scholar]
- Porselvi, T.; Deepa, K.; Muthu, R. Hardware Implementation of Three Phase Five-level Inverter with Reduced Number of Switches for PV Based Supply. J. Green Eng. 2017, 7, 527–546. [Google Scholar] [CrossRef] [Green Version]
- Rolan, A.; Luna, A.; Vazquez, G.; Aguilar, D.; Azevedo, G. Modeling of a variable speed wind turbine with a Permanent Magnet Synchronous Generator. In Proceedings of the IEEE International Symposium on Industrial Electronics, Seoul, Korea, 5–8 July 2009; pp. 734–739. [Google Scholar]
- Jih-Sheng, L.; Fang, Z.P. Multilevel converters-a new breed of power converters. IEEE Trans. Ind. Appl. 1996, 32, 509–517. [Google Scholar] [CrossRef]
- Deepa, K.; Savitha, P.; Vinodhini, B. Harmonic analysis of a modified cascaded multilevel inverter. In Proceedings of the1st International Conference on Electrical Energy Systems, Newport Beach, CA, USA; 2011; pp. 92–97. [Google Scholar]
- Woodford, C.; Phillips, C. Numerical Methods with Worked Examples, 1st ed.; Chapman and Hall: London, UK, 1997; pp. 45–57. [Google Scholar]
- Athira, S.; Deepa, K. Modified Bidirectional Converter with Current Fed Inverter. Int. J. Power Electron. Drive Syst. 2015, 6, 387–395. [Google Scholar]
- Savitha, K.P.; Kanakasabapathy, P. Multi-port DC-DC converter for DC microgrid applications. In Proceedings of the IEEE 6th International Conference on Power Systems, New Delhi, India, 28–29 November 2016; pp. 1–6. [Google Scholar]
- Nair, P.; Deepa, K. Two-port DC-DC converter with flyback inverter for rural lighting applications. In Proceedings of the 2015 International Conference on Technological Advancements in Power and Energy (TAP Energy), Kollam, India, 24–26 June 2015; pp. 249–253. [Google Scholar]
- Vijayakumari, A.; Anusha, K.V. Subharmonics detection in regular sampled Space Vector PWM and its mitigation with low computational dynamic sampling. In Proceedings of the IEEE International Conference on Power Electronics, Drives and Energy Systems, PEDES, Trivandrum, India, 14–17 December 2016; pp. 1–6. [Google Scholar]
- Sandhu, M.; Thakur, T. Reduction of Harmonics In a Hybrid PV/Wind Microgrid Using a Modified Multilevel Inverter. In Proceedings of the 2019 IEEE Electrical Power and Energy Conference (EPEC), Montreal, QC, Canada, 16–18 October 2019; pp. 1–6. [Google Scholar]
- Jayabalan, M.; Jeevarathinam, B.; Sandirasegarane, T. Reduced switch count pulse width modulated multilevel inverter. IET Power Electron. 2017, 10, 10–17. [Google Scholar] [CrossRef]
- Zerouali, M.; Boutouba, M.; Ougli, A.E.; Tidhaf, B. Control of variable speed wind energy conversion systems by fuzzy logic and conventional P&O. In Proceedings of the 2019 International Conference on Intelligent Systems and Advanced Computing Sciences (ISACS), Taza, Morocco, 26–27 December 2019; pp. 1–5. [Google Scholar]
- Soliman, M.A.; Hasanien, H.M.; Al-Durra, A. High-Performance Frequency Converter Controlled Variable-Speed Wind Generator Using Linear-Quadratic Regulator Controller. In Proceedings of the 2019 IEEE Industry Applications Society Annual Meeting, Piscataway, NJ, USA, 29 September–3 October 2019; pp. 1–7. [Google Scholar]
- Shrivastava, S.; Tripathi, A.; Verma, K.S. Reduction in total harmonic distortion by implementing multi-level inverter technology in grid integrated DFIG. In Proceedings of the 2015 Communication, Control and Intelligent Systems (CCIS), Mathura, India, 7–8 November 2015; pp. 491–495. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Voltage THD | |
|---|---|
| Conventional five-level inverter | 20.92% |
| Proposed five-level inverter with New SHEPWM | 17.48% |
| Converter | Time to Settle with an Increase in PMSG Voltage | Time to Settle with the Decrease in PMSG Voltage |
|---|---|---|
| Buck-boost | 0.9 s | 0.8 s |
| Cuk | 0.9 s | 1 s |
| Hardware Items | Specifications |
|---|---|
| Switching devices | CT60AM-18F |
| Microcontroller | PIC 4011 (dsPIC00F4011) |
| FPGA | Spartan 3E |
| Opto-coupler | 6N137 |
| Gate driver | IR2110 |
| Transformers | Toroidal core, turns ratio: 1:1, 230 V, 2 A, 50 Hz |
| Buck-boost | L = 50 mH, C = 330 μF |
| Cuk | L1 = 50 mH, L2 = 1500 μH, C1 = 330 μF, C2 = 660 μF |
| Load | 750 Ω, 240 mH |
| Controller | P = 0.00045, I = 0.0035 |
| Line Voltage THD | % |
|---|---|
| Simulation | 12.35 |
| Experimental | 12.116 |
| Converter | Input DC Voltage (VDCI) (V) | Input DC Current (IDCI) (A) | Output DC Voltage (VDCO) (V) | Output DC Current (IDCO) (A) | Efficiency |
|---|---|---|---|---|---|
| Buck-boost | 159.61 | 1.102 | 160.36 | 0.9 | 82.05% |
| Cuk converter | 161.63 | 1.203 | 160.4 | 1.1289 | 93.12% |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Thayumanavan, P.; Kaliyaperumal, D.; Subramaniam, U.; Bhaskar, M.S.; Padmanaban, S.; Leonowicz, Z.; Mitolo, M. Combined Harmonic Reduction and DC Voltage Regulation of A Single DC Source Five-Level Multilevel Inverter for Wind Electric System. Electronics 2020, 9, 979. https://doi.org/10.3390/electronics9060979
Thayumanavan P, Kaliyaperumal D, Subramaniam U, Bhaskar MS, Padmanaban S, Leonowicz Z, Mitolo M. Combined Harmonic Reduction and DC Voltage Regulation of A Single DC Source Five-Level Multilevel Inverter for Wind Electric System. Electronics. 2020; 9(6):979. https://doi.org/10.3390/electronics9060979
Chicago/Turabian StyleThayumanavan, Porselvi, Deepa Kaliyaperumal, Umashankar Subramaniam, Mahajan Sagar Bhaskar, Sanjeevikumar Padmanaban, Zbigniew Leonowicz, and Massimo Mitolo. 2020. "Combined Harmonic Reduction and DC Voltage Regulation of A Single DC Source Five-Level Multilevel Inverter for Wind Electric System" Electronics 9, no. 6: 979. https://doi.org/10.3390/electronics9060979