Direct Space Vector Modulation with Novel DC-Link Voltage Balancing Algorithm for Easy Software Implementation of Three-Phase Three-Level Converter


Abstract
:1. Introduction
2. Algorithm Analysis
2.1. The Conventional SVM Algorithm
2.2. The Proposed DSVM Algorithm
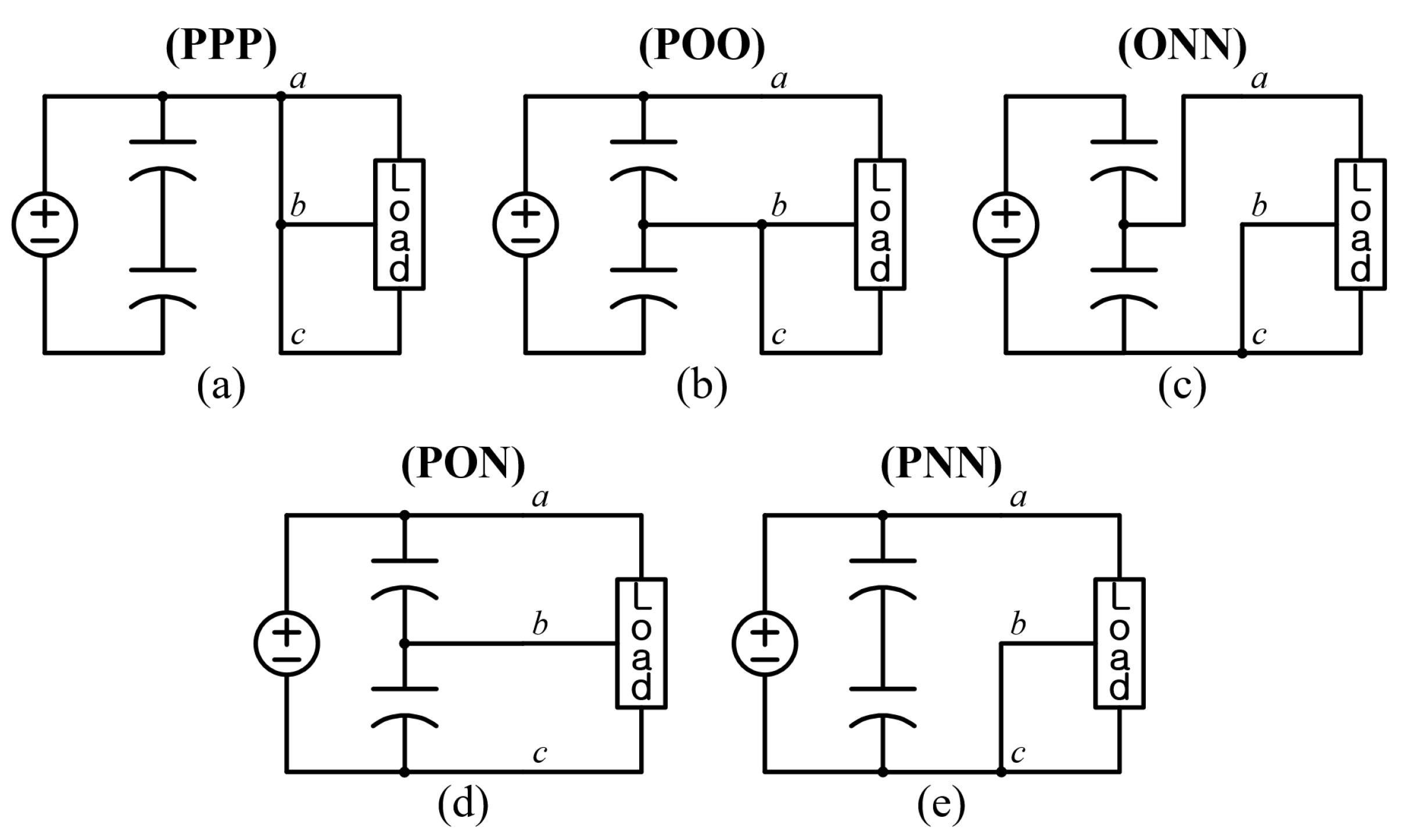
2.3. The Proposed Balancing Algorithm of the DC-Link Voltage
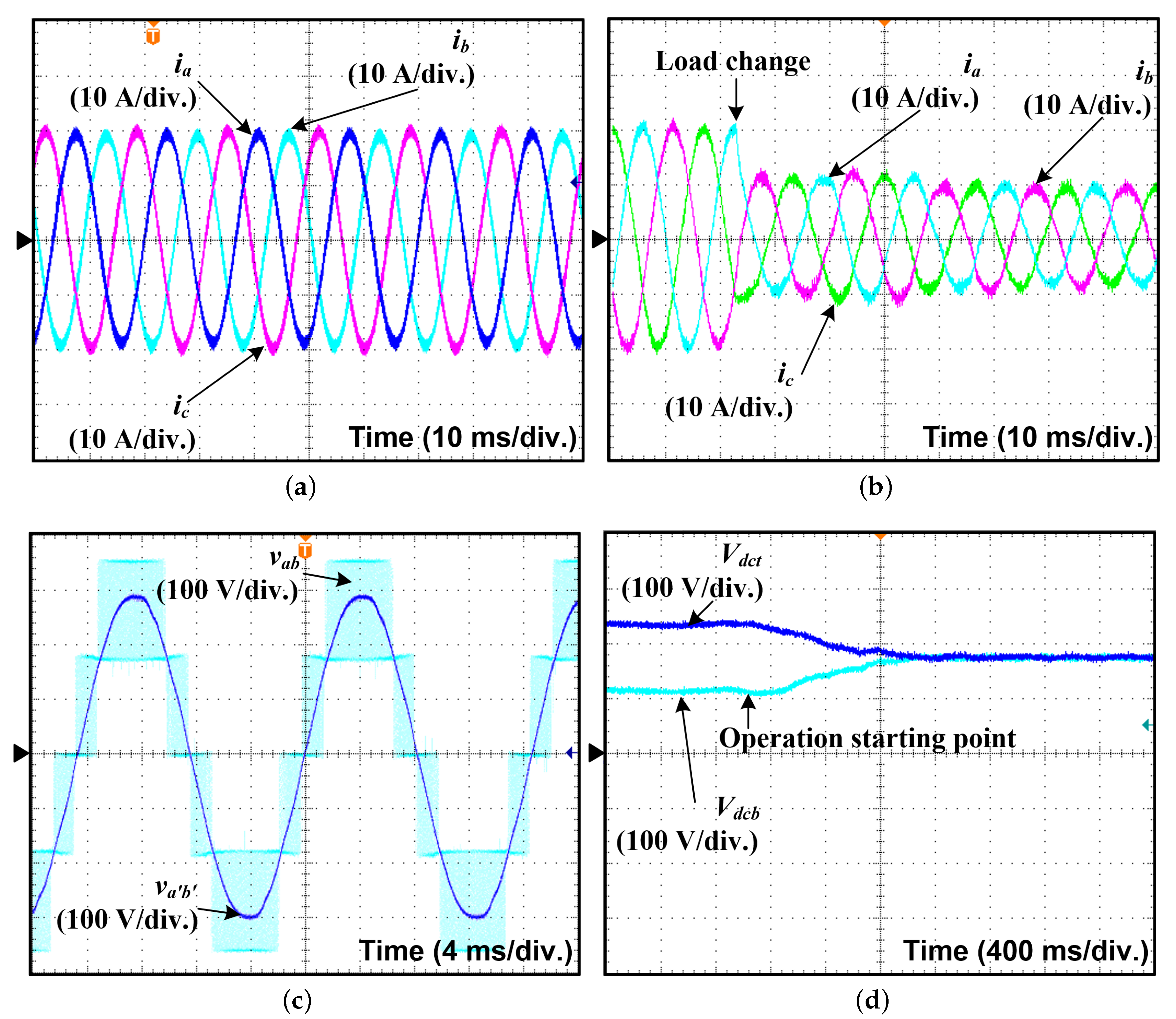
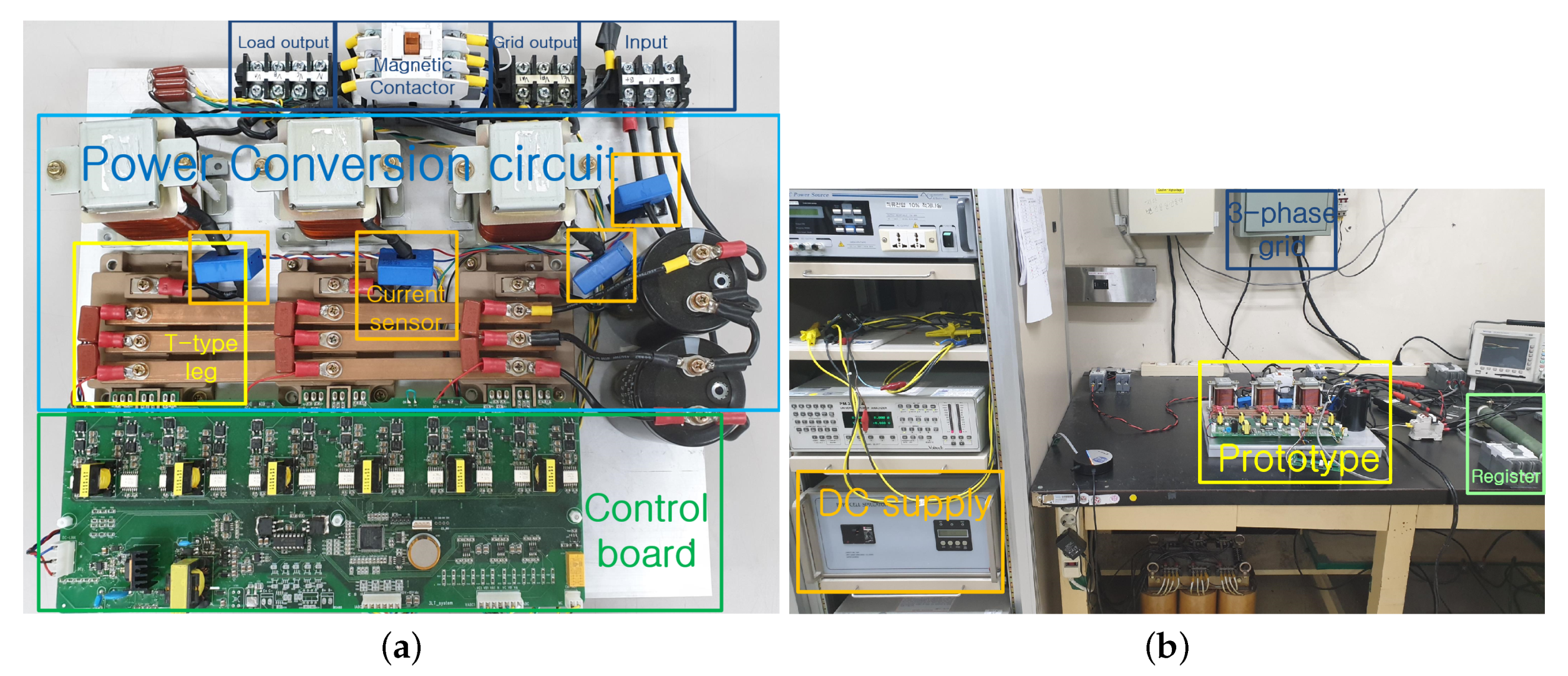
3. Experimental Result
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Alberto, F.; Batista, B.; Barbi, I. Space Vector Modulation Applied to Three-Phase Three-Switch Two-Level Unidirectional PWM Rectifier. IEEE Trans. Power Electron. 2007, 22, 2245–2252. [Google Scholar]
- Li, Y.; Yang, X.; Chen, W. Circulating Current Analysis and Suppression for Configured Three-Limb Inductors in Paralleled Three-Level T-Type Converters With Space-Vector Modulation. IEEE Trans. Power Electron. 2017, 32, 338–3354. [Google Scholar] [CrossRef]
- Youm, J.H.; Kwon, B.H. An effective software implementation of the space-vector modulation. IEEE Trans. Ind. Electron. 1999, 46, 866–868. [Google Scholar] [CrossRef]
- Kwon, J.M.; Kwon, B.H.; Nam, K.H. Three-phase photovoltaic system with three-level boosting MPPT control. IEEE Trans. Power Electron. 2008, 23, 2319–2327. [Google Scholar] [CrossRef] [Green Version]
- Bhat, A.H.; Langer, N. Capacitor Voltage Balancing of Three-Phase Neutral-Point-Clamped Rectifier Using Modified Reference Vector. IEEE Trans. Power Electron. 2014, 29, 561–568. [Google Scholar] [CrossRef]
- Hasan, M.; Mekhilef, S.; Ahmed, M. Three-phase hybrid multilevel inverter with less power electronic components using space vector modulation. IET Power Electron. 2014, 7, 1256–1265. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z.; Wang, Y.; Chen, J.; Hu, Y. Decoupled Vector Space Decomposition Based Space Vector Modulation for Dual Three-Phase Three-Level Motor Drives. IEEE Trans. Power Electron. 2018, 33, 10683–10697. [Google Scholar] [CrossRef]
- Beig, A.R.; Kanukollu, S.; Al Hosani, K.; Dekka, A. Space-Vector-Based Synchronized Three-Level Discontinuous PWM for Medium-Voltage High-Power VSI. IEEE Trans. Ind. Electron. 2014, 61, 3891–3901. [Google Scholar] [CrossRef]
- Li, B.; Li, L.; Li, L.; Jin, S. Multidimensional Space-Vector PWM Algorithm Using Branch Space Voltage Vector. IEEE Trans. Power Electron. 2016, 31, 8517–8527. [Google Scholar] [CrossRef]
- Kim, J.S.; Kwon, J.M.; Kwon, B.H. High-efficiency two-stage three-level grid-connected photovoltaic inverter. IEEE Trans. Ind. Electron. 2018, 65, 2368–2377. [Google Scholar] [CrossRef]
- Ding, W.; Zhang, C.; Gao, F.; Duan, B.; Qiu, H. A zero-sequence component injection modulation method with compensation for current harmonic mitigation of a vienna rectifier. IEEE Trans. Power Electron. 2019, 34, 801–814. [Google Scholar] [CrossRef]
- Ding, L.; Li, Y. Simultaneous DC Current Balance and CMV Reduction for Parallel CSC System With Interleaved Carrier-Based SPWM. IEEE Trans. Ind. Electron. 2020, 67, 8495–8505. [Google Scholar] [CrossRef]
- Hatti, N.; Hasegawa, K.; Akagi, H. A 6.6-kV transformerless motor drive using a five-level diode-clamped PWM inverter for energy savings of pumps and blowers. IEEE Trans. Power Electron. 2009, 24, 796–803. [Google Scholar] [CrossRef]
- Shukla, A.; Ghosh, A.; Joshi, A. Flying-capacitor-based chopper circuit for dc capacitor voltage balancing in diode-clamped multilevel inverter. IEEE Trans. Ind. Electron. 2010, 57, 2249–2261. [Google Scholar] [CrossRef] [Green Version]
- Zhao, J.; Han, Y.; He, X.; Tan, C.; Cheng, J.; Zhao, R. Multilevel circuit topologies based on the switched-capacitor converter and diode-clamped converter. IEEE Trans. Power Electron. 2011, 26, 2127–2136. [Google Scholar] [CrossRef]
- Kim, J.S.; Lee, S.H.; Cha, W.J.; Kwon, B.H. High-efficiency bridgeless three-level power factor correction rectifier. IEEE Trans. Ind. Electron. 2017, 64, 1130–1136. [Google Scholar] [CrossRef]
- Xiang, C.Q.; Shu, C.; Han, D.; Mao, B.K.; Wu, X.; Yu, T.J. Improved virtual space vector modulation for three-level neutral-point-clamped converter with feedback of neutral-point voltage. IEEE Trans. Power Electron. 2018, 33, 5452–5464. [Google Scholar] [CrossRef]
- Shukla, S.; Singh, B. Solar powered sensorless induction motor drive with improved efficiency for water pumping. IET Power Electron. 2018, 11, 416–426. [Google Scholar] [CrossRef]
- Xing, X.; Zhang, Z.; Zhang, C.; He, J.; Chen, A. Space vector modulation for circulating current suppression using deadbeat control strategy in parallel three-level neutral-clamped inverters. IEEE Trans. Ind. Electron. 2017, 64, 977–987. [Google Scholar] [CrossRef]
- Qin, C.; Zhang, C.; Xing, X.; Li, X.; Chen, A.; Zhang, G. Simultaneous common-mode voltage reduction and neutral-point voltage balance scheme for the quasi-Z-source three-level T-type inverter. IEEE Trans. Ind. Electron. 2020, 67, 1956–1967. [Google Scholar] [CrossRef]
- Rivera, S.; Wu, B.; Kouro, S.; Yaramasu, V.; Wang, J. Electric vehicle charging station using a neutral point clamped converter with bipolar dc bus. IEEE Trans. Ind. Electron. 2011, 58, 2293–2303. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
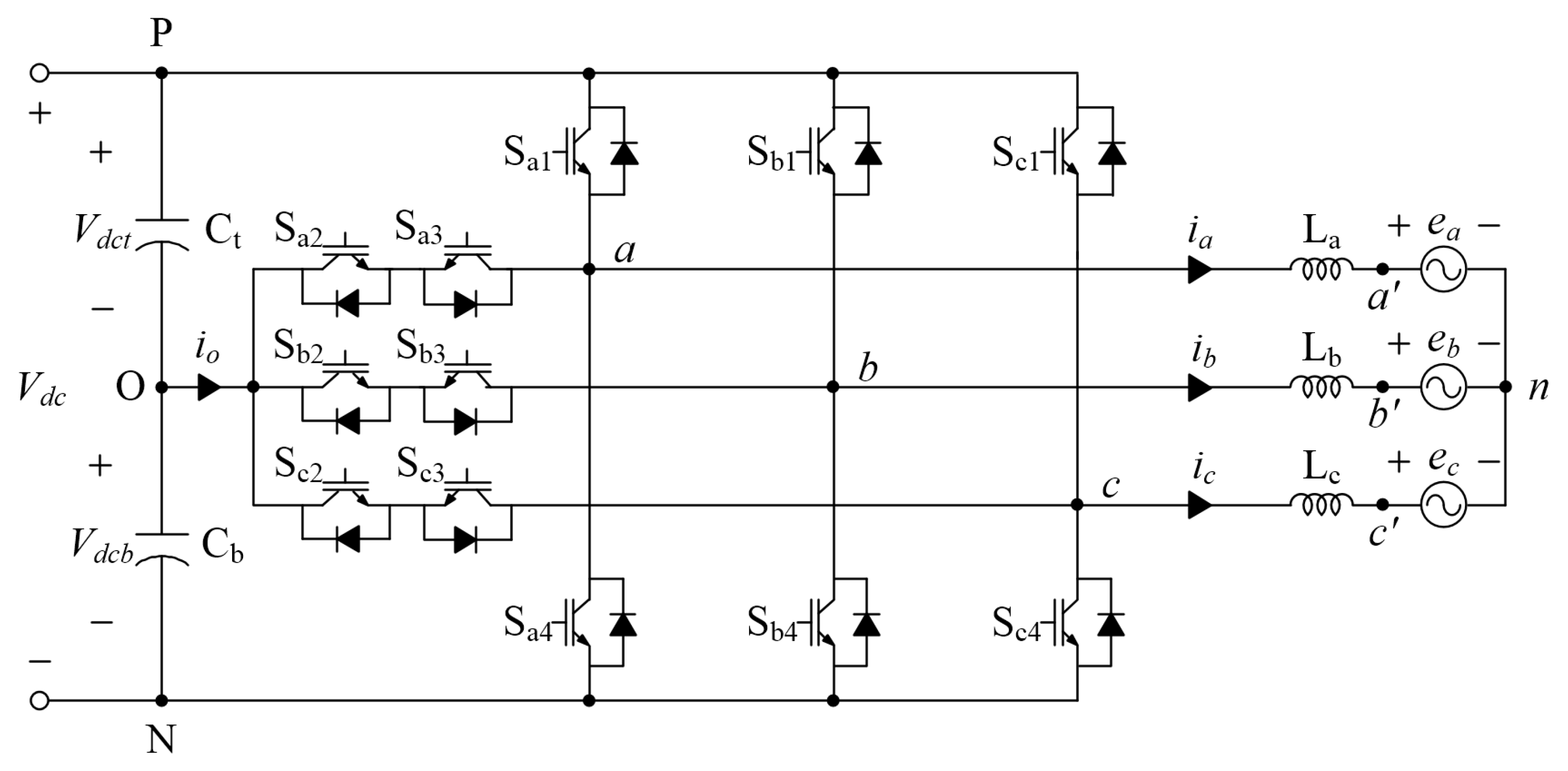
| Switching State | Switch Status (x ) | Terminal Voltage () | |||
|---|---|---|---|---|---|
| S | S | S | S | ||
| (P) | ON | ON | OFF | OFF | /2 |
| (O) | OFF | ON | ON | OFF | 0 |
| (N) | OFF | OFF | ON | ON | /2 |
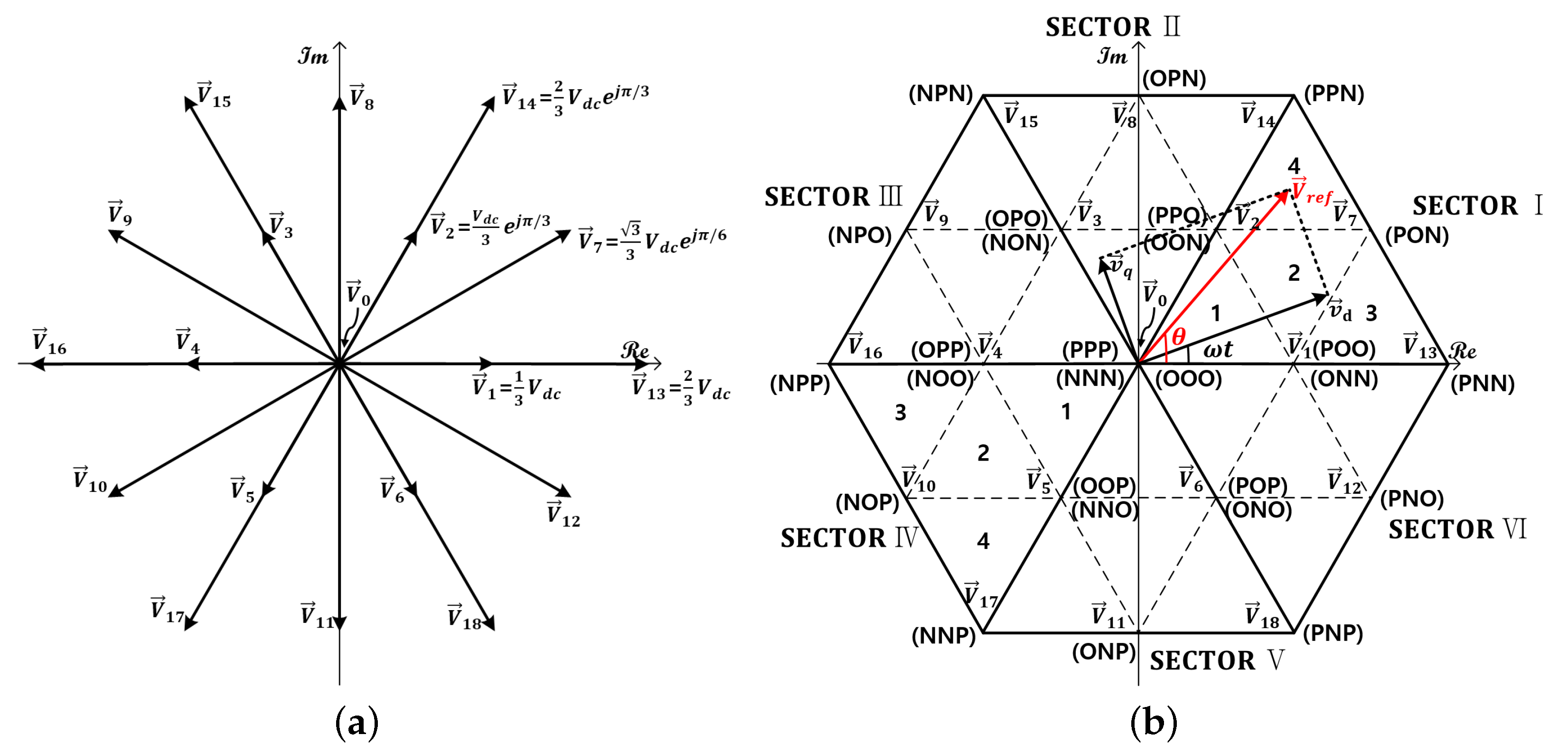
| Region | |||
|---|---|---|---|
| 1 | |||
| 2 | |||
| 3 | |||
| 4 |
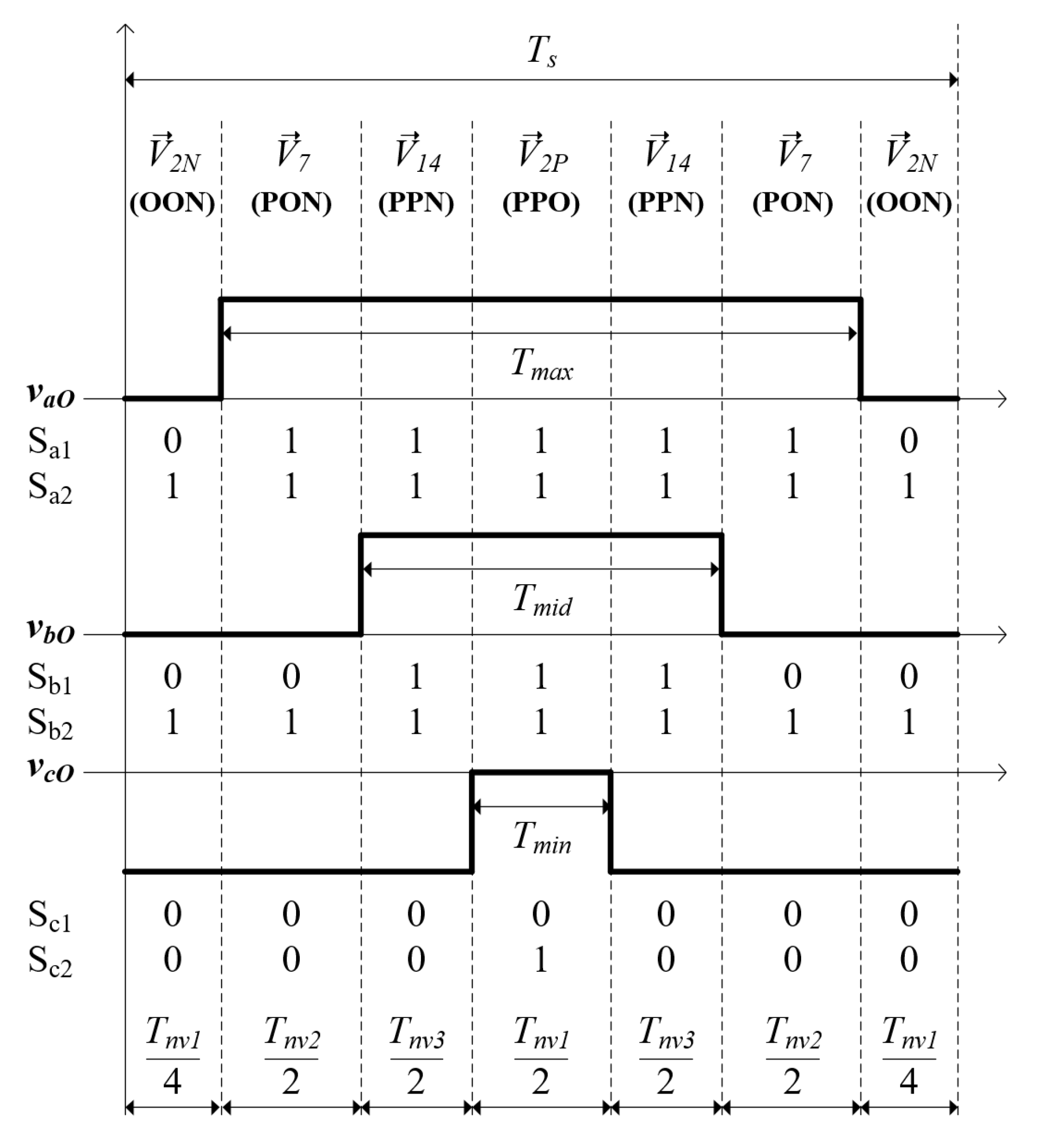
| Condition | On-State Times (x ) | |
|---|---|---|
| 0 | ||
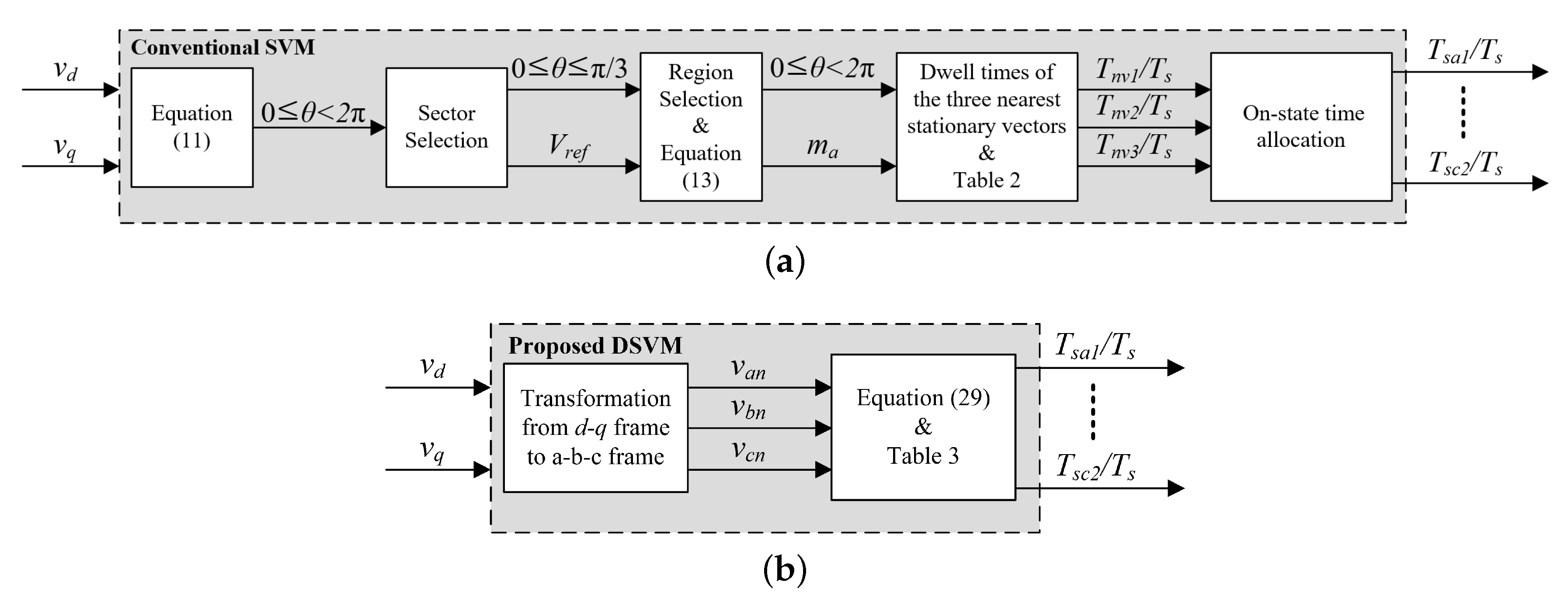
| Ref. | The Number of | The Number of | Generalized Equations |
|---|---|---|---|
| Switching Sequence | Total Regions | for Gate Signal | |
| [11] | Not required | 12 | Each sector has |
| different equations | |||
| [17] | 25 | 18 | Not provided |
| [18] | 12 | 6 | Not provided |
| [19] | 36 | 36 | Not provided |
| [20] | 24 | 12 | Not provided |
| [21] | 36 | 36 | Not provided |
| SSVM | Not required | Not required | Only one |
| generalized equation |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, J.-S.; Kwon, J.-M. Direct Space Vector Modulation with Novel DC-Link Voltage Balancing Algorithm for Easy Software Implementation of Three-Phase Three-Level Converter. Electronics 2020, 9, 1841. https://doi.org/10.3390/electronics9111841
Kim J-S, Kwon J-M. Direct Space Vector Modulation with Novel DC-Link Voltage Balancing Algorithm for Easy Software Implementation of Three-Phase Three-Level Converter. Electronics. 2020; 9(11):1841. https://doi.org/10.3390/electronics9111841
Chicago/Turabian StyleKim, Jun-Seok, and Jung-Min Kwon. 2020. "Direct Space Vector Modulation with Novel DC-Link Voltage Balancing Algorithm for Easy Software Implementation of Three-Phase Three-Level Converter" Electronics 9, no. 11: 1841. https://doi.org/10.3390/electronics9111841