Sliding Mode Controller and Lyapunov Redesign Controller to Improve Microgrid Stability: A Comparative Analysis with CPL Power Variation

 ,
,  ,
,  , and
, and
Abstract
:1. Introduction
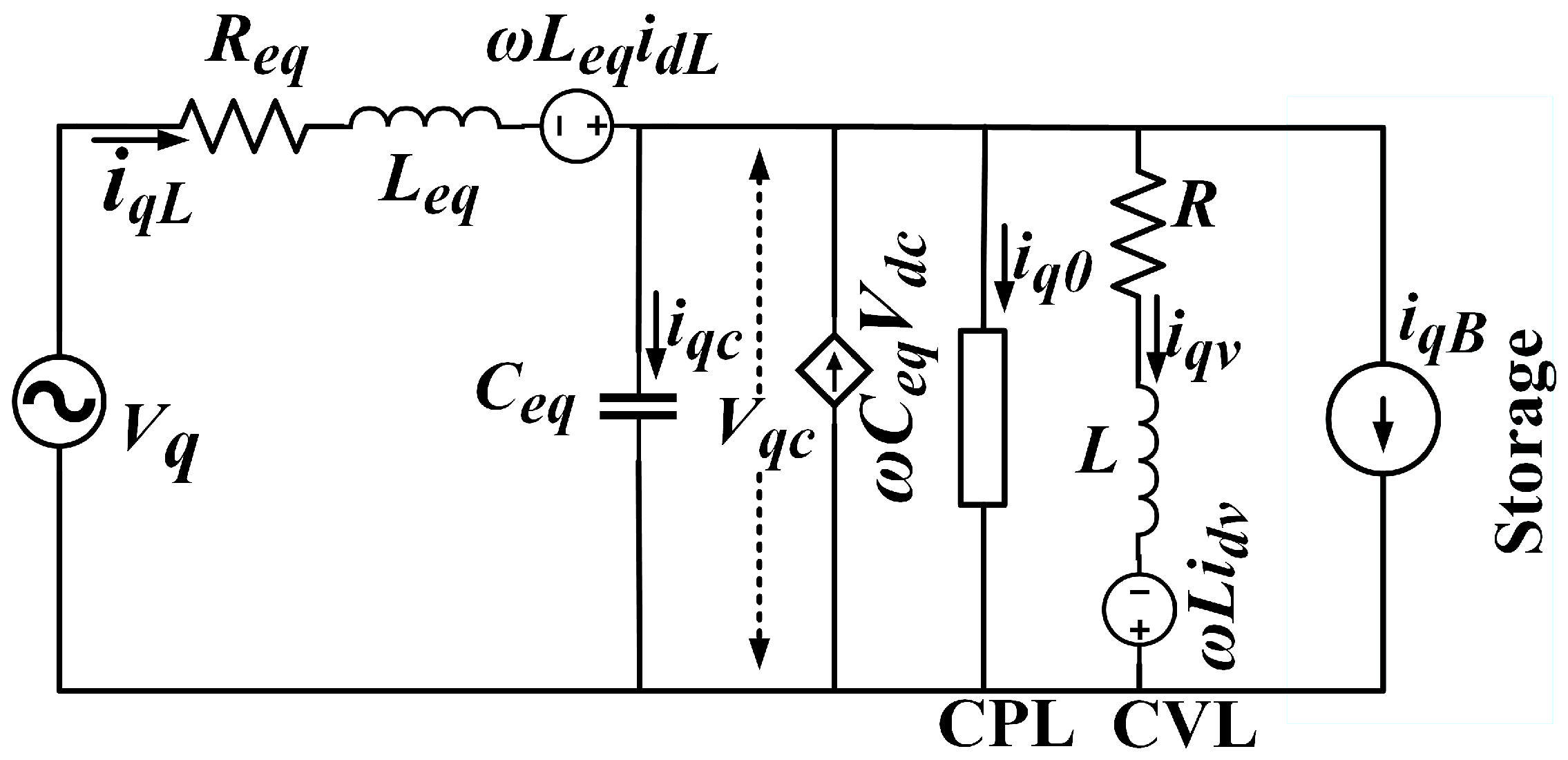
2. Modeling Microgrid with CPL
3. Introduction to SMC and LRC
3.1. Sliding Mode Controller (SMC)
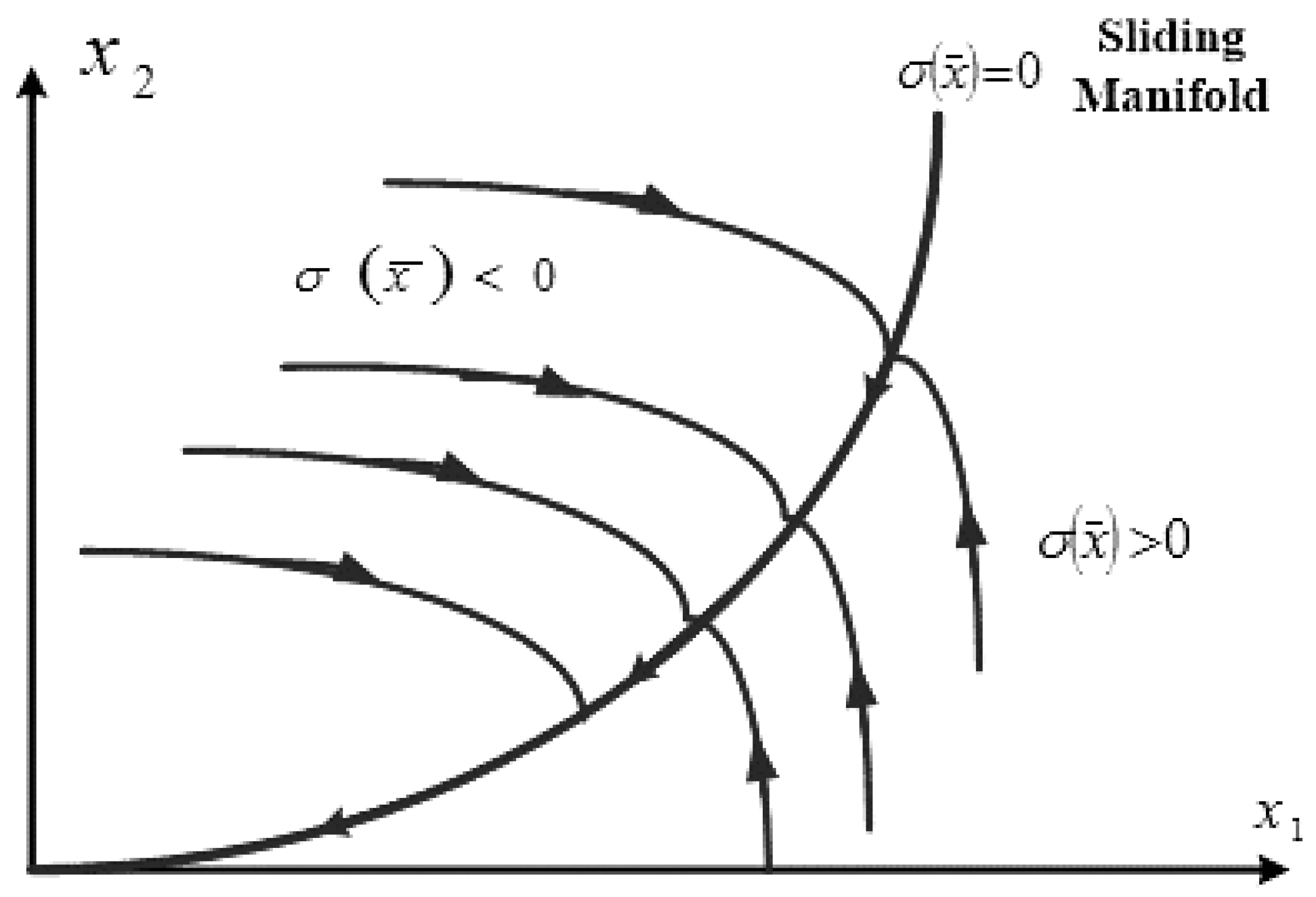
3.1.1. Control Statement of Sliding Mode
3.1.2. Chattering
3.1.3. Chattering Reduction
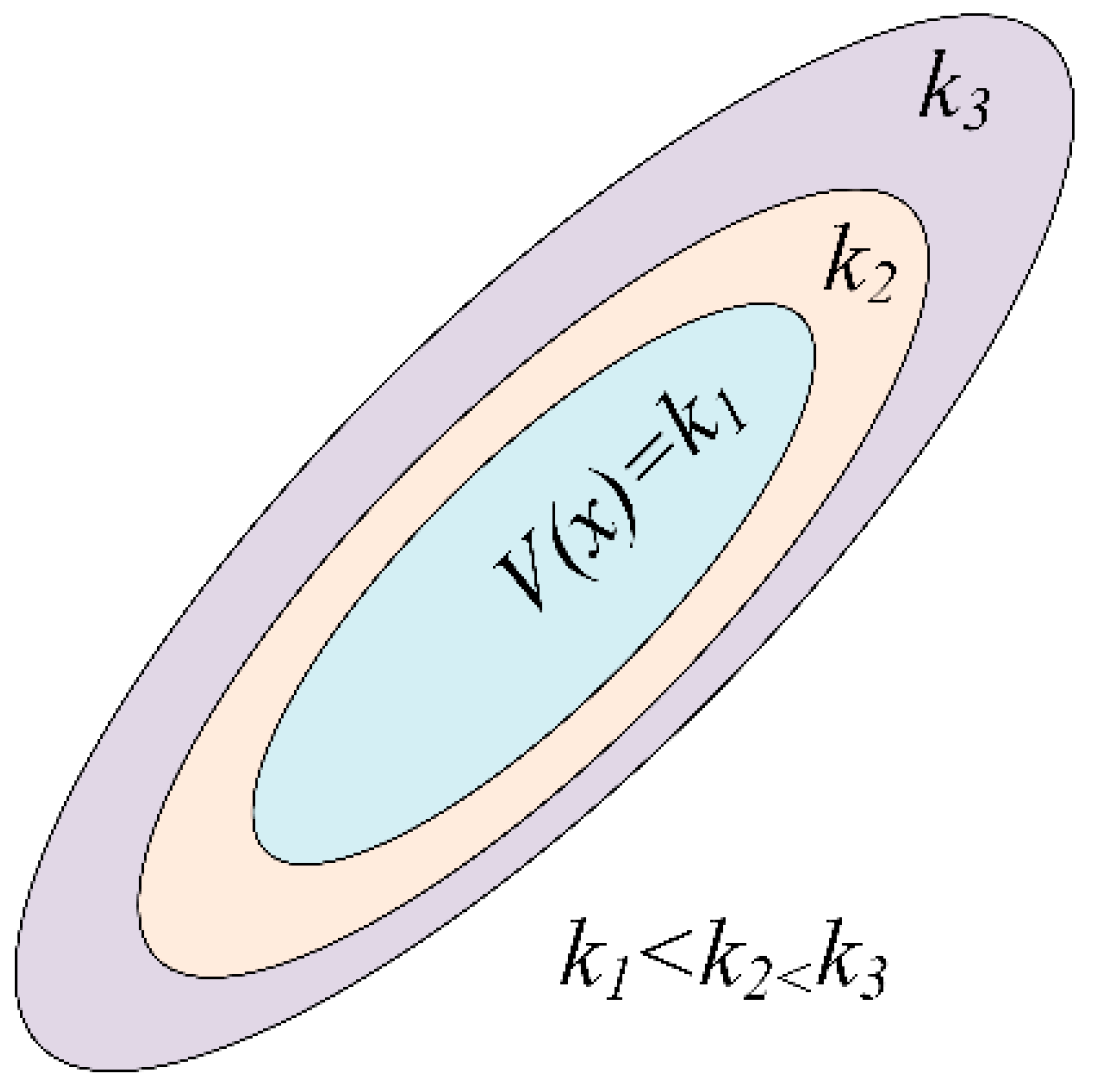
3.2. Lyapunov Redesign Controller (LRC)
4. Implementation and Robustness Analysis of SMC and LRC
4.1. Implementation and Robustness Analysis of Sliding Mode Controller against Parametric Uncertainties Including Uncertainties in Power of CPL
4.2. Implementation and Robustness Analysis of Lyapunov Redesign Controller against Parametric Uncertainties Including Uncertainties in Power of CPL
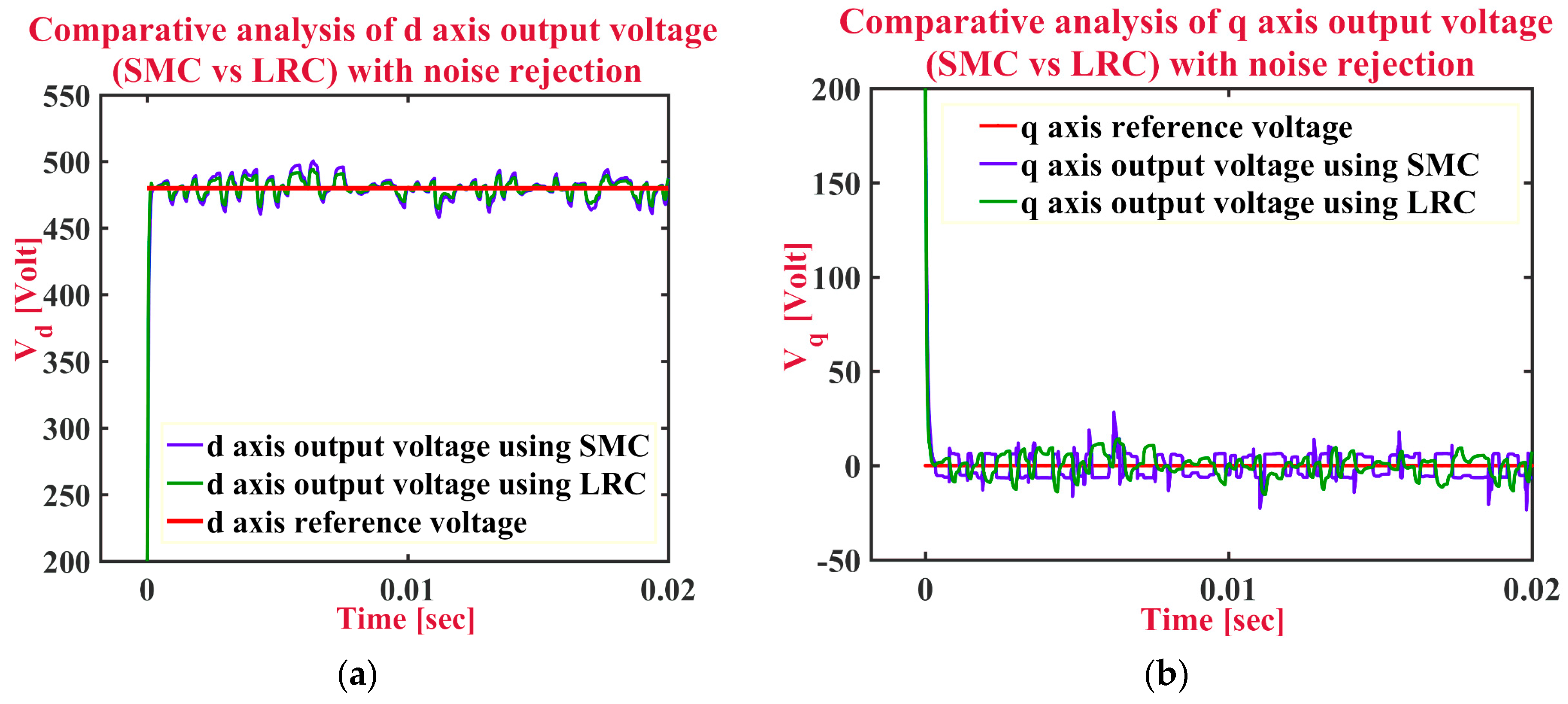
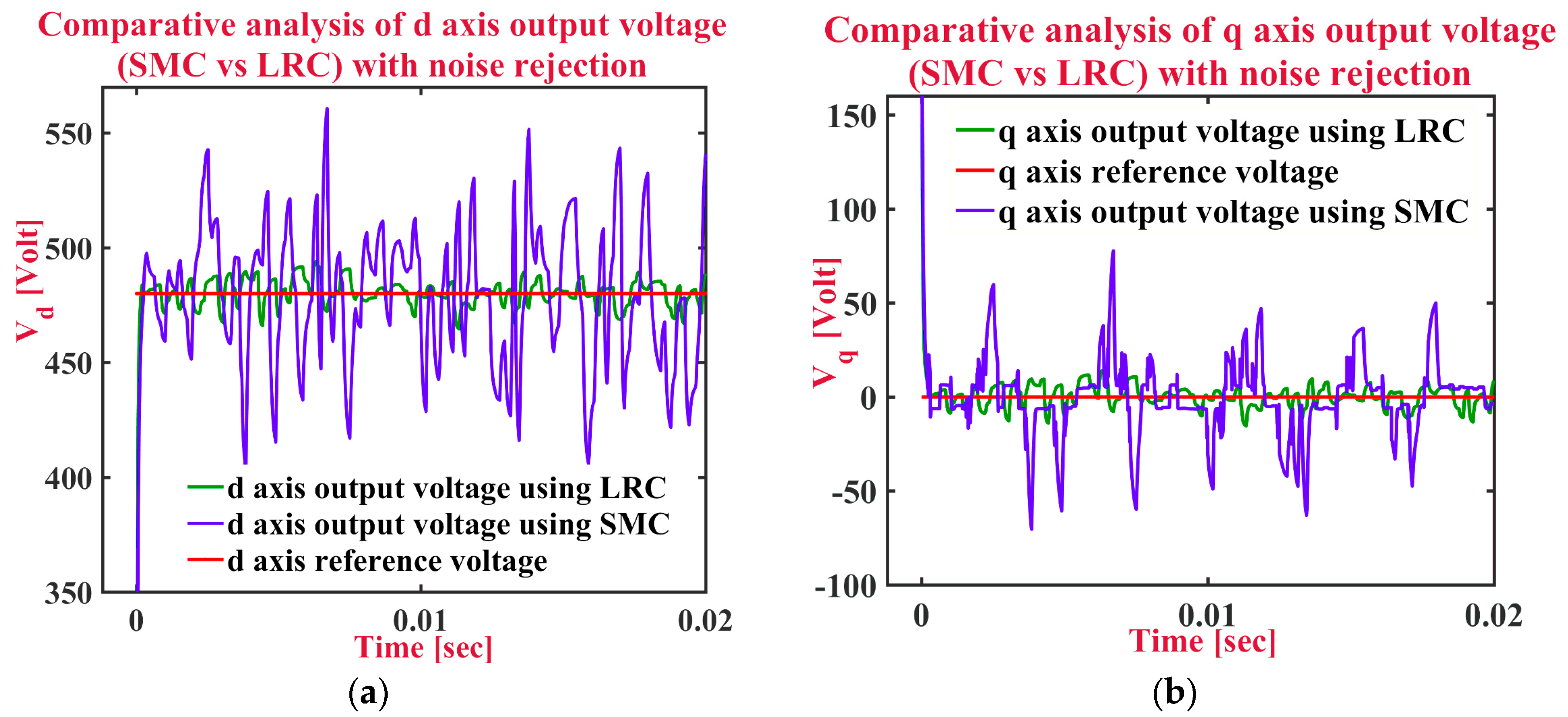
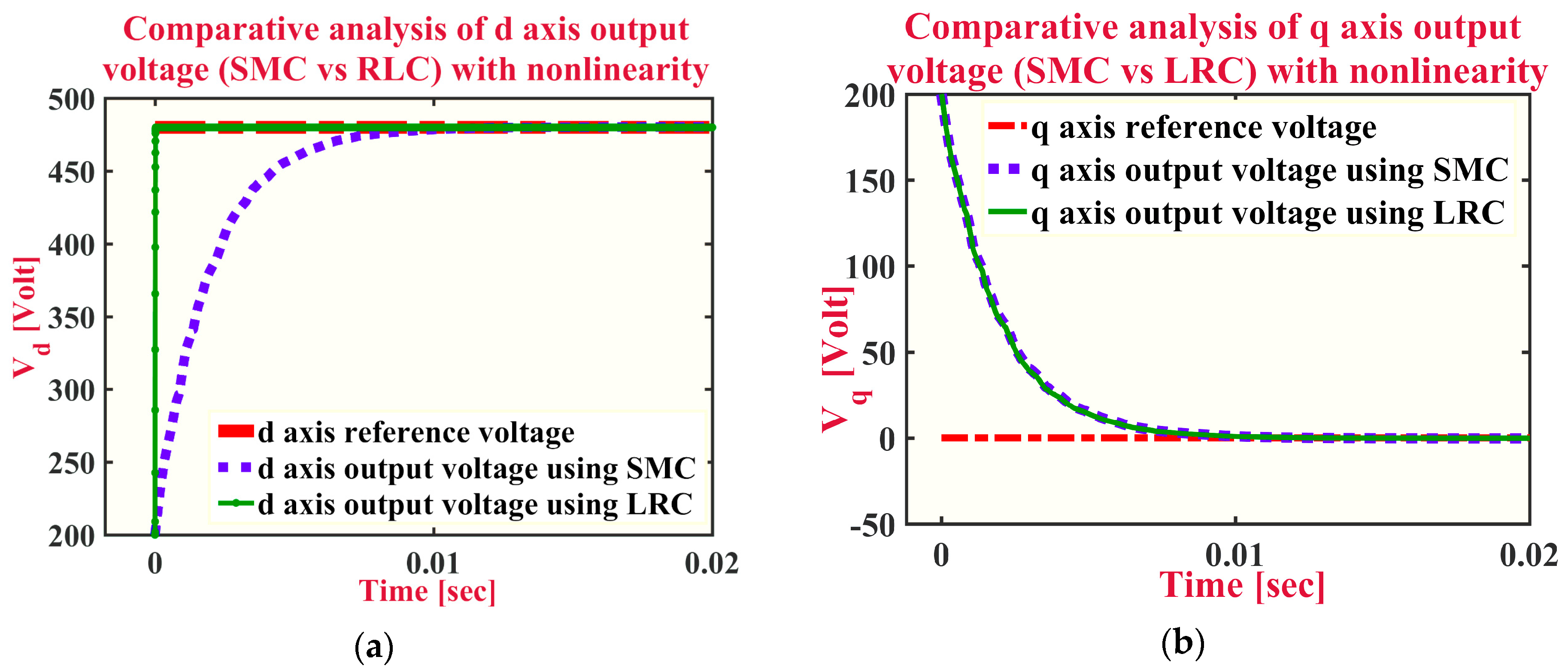
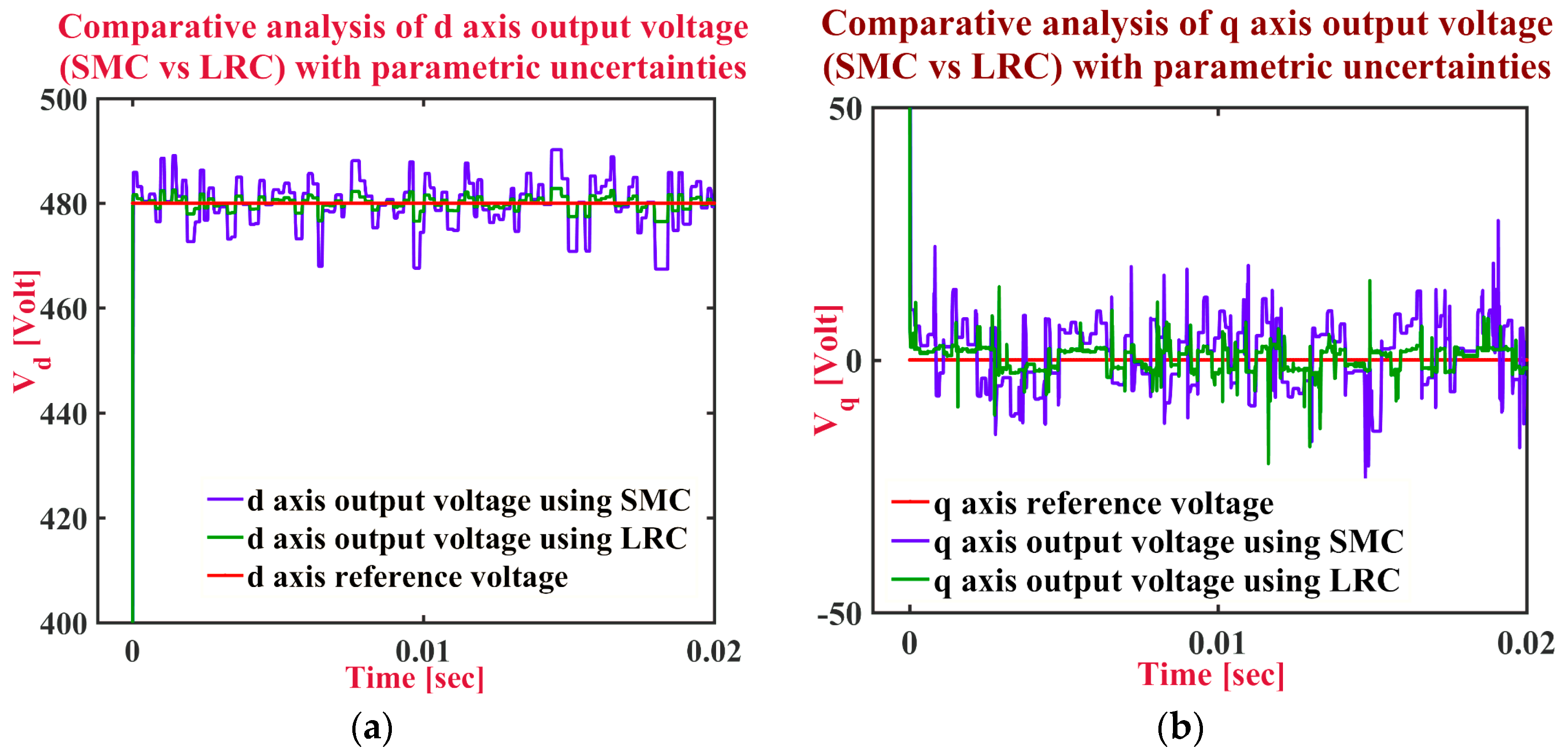
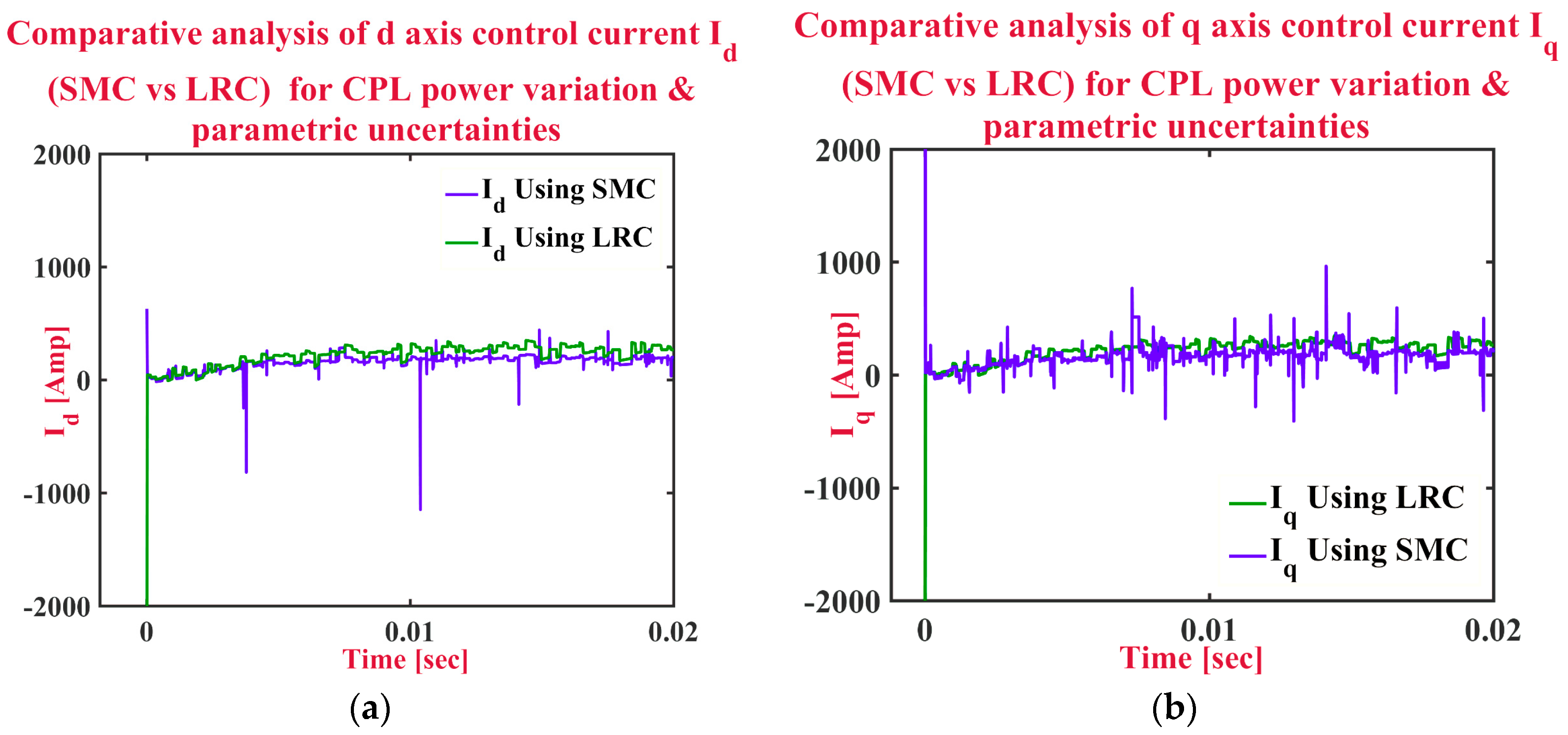
5. Results
6. Reason behind Inferior SMC Performance and Solutions
7. Numerical Verification of Results for Microgrid Application
7.1. SMC Technique
7.2. LRC Technique
8. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Bayindir, R.; Hossain, E.; Kabalci, E.; Perez, R. A comprehensive study on microgrid technology. Int. J. Renew. Energy Res. 2014, 4, 1094–1107. [Google Scholar]
- Hossain, E.; Kabalci, E.; Bayindir, R.; Perez, R. Microgrid testbeds around the world: State of art. Energy Convers. Manag. 2014, 86, 132–153. [Google Scholar] [CrossRef]
- Reddy, K.R.; Babu, N.R.; Sanjeevikumar, P. A review on grid codes and reactive power management in power grids with wecs. In Advances in Smart Grid and Renewable Energy; Springer: Berlin, Germany, 2018; pp. 525–539. [Google Scholar]
- Un-Noor, F.; Padmanaban, S.; Mihet-Popa, L.; Mollah, M.N.; Hossain, E. A comprehensive study of key electric vehicle (ev) components, technologies, challenges, impacts, and future direction of development. Energies 2017, 10, 1217. [Google Scholar] [CrossRef]
- Ganesan, S.; Padmanaban, S.; Varadarajan, R.; Subramaniam, U.; Mihet-Popa, L. Study and analysis of an intelligent microgrid energy management solution with distributed energy sources. Energies 2017, 10, 1419. [Google Scholar] [CrossRef]
- AL-Nussairi, M.K.; Bayindir, R.; Padmanaban, S.; Mihet-Popa, L.; Siano, P. Constant power loads (cpl) with microgrids: Problem definition, stability analysis and compensation techniques. Energies 2017, 10, 1656. [Google Scholar] [CrossRef]
- Mihet-Popa, L.; Isleifsson, F.; Groza, V. Experimental Testing for Stability Analysis of Distributed Energy Resorces Components with Storage Devices and Loads. In Proceedings of the 2012 IEEE International Instrumentation and Measurement Technology Conference, Graz, Austria, 13–16 May 2012; pp. 588–593. [Google Scholar]
- Mihet-Popa, L.; Han, X.; Bindner, H.; Pihl-Andersen, J.; Mehmedalic, J. Development and Modeling of different scenarios for a Smart Distribution Grid. In Proceedings of the 2013 IEEE 8th International Symposium on Applied Computational Intelligence and Informatics, Timisoara, Romania, 23–25 May 2013; pp. 257–261. [Google Scholar]
- Mihet-Popa, L.; Zong, Y.; You, S.; Groza, V. Simulation Platform Developed to Study and Identify Critical Cases in a Future Smart Grid. In Proceedings of the 2016 IEEE Electrical Power and Energy Conference (EPEC), Ottawa, ON, Canada, 12–14 October 2016. [Google Scholar]
- Camacho, O.M.F.; Nørgård, P.B.; Rao, N.; Mihet-Popa, L. Electrical Vehicle Batteries Testing in a Distribution Network using Sustainable Energy. IEEE Trans. Smart Grid 2014, 5, 1033–1042. [Google Scholar] [CrossRef]
- Emadi, A.; Khaligh, A.; Rivetta, C.H.; Williamson, G.A. Constant power loads and negative impedance instability in automotive systems: Definition, modeling, stability, and control of power electronic converters and motor drives. IEEE Trans. Veh. Technol. 2006, 55, 1112–1125. [Google Scholar] [CrossRef]
- Jelani, N.; Molinas, M.; Bolognani, S. Reactive power ancillary service by constant power loads in distributed ac systems. IEEE Trans. Power Deliv. 2013, 28, 920–927. [Google Scholar] [CrossRef]
- Rahimi, A.M.; Williamson, G.A.; Emadi, A. Loop-cancellation technique: A novel nonlinear feedback to overcome the destabilizing effect of constant-power loads. IEEE Trans. Veh. Technol. 2010, 59, 650–661. [Google Scholar] [CrossRef]
- Huddy, S.R.; Skufca, J.D. Amplitude death solutions for stabilization of dc microgrids with instantaneous constant-power loads. IEEE Trans. Power Electron. 2013, 28, 247–253. [Google Scholar] [CrossRef]
- Kwasinski, A.; Onwuchekwa, C.N. Dynamic behavior and stabilization of dc microgrids with instantaneous constant-power loads. IEEE Trans. Power Electron. 2011, 26, 822–834. [Google Scholar] [CrossRef]
- Sanchez, S.; Molinas, M. Large signal stability analysis at the common coupling point of a dc microgrid: A grid impedance estimation approach based on a recursive method. IEEE Trans. Energy Convers. 2015, 30, 122–131. [Google Scholar] [CrossRef]
- Wu, M.; Lu, D.D.-C. A novel stabilization method of lc input filter with constant power loads without load performance compromise in dc microgrids. IEEE Trans. Ind. Electron. 2015, 62, 4552–4562. [Google Scholar] [CrossRef]
- Hossain, E.; Perez, R.; Nasiri, A.; Bayindir, R. Development of lyapunov redesign controller for microgrids with constant power loads. Renew. Energy Focus 2017, 19, 49–62. [Google Scholar] [CrossRef]
- Hossain, E.; Perez, R.; Padmanaban, S.; Siano, P. Investigation on the development of a sliding mode controller for constant power loads in microgrids. Energies 2017, 10, 1086. [Google Scholar] [CrossRef]
- Singh, S.; Fulwani, D.; Kumar, V. Robust sliding-mode control of dc/dc boost converter feeding a constant power load. IET Power Electron. 2015, 8, 1230–1237. [Google Scholar] [CrossRef]
- Padmanaban, S.; Ozsoy, E.; Fedák, V.; Blaabjerg, F. Development of sliding mode controller for a modified boost ćuk converter configuration. Energies 2017, 10, 1513. [Google Scholar] [CrossRef]
- Stramosk, V.; Pagano, D.J. Nonlinear control of a bidirectional dc-dc converter operating with boost-type constant-power loads. In Proceedings of the 2013 Brazilian Power Electronics Conference (COBEP), Gramado, Brazil, 27–31 October 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 305–310. [Google Scholar]
- Gautam, A.R.; Singh, S.; Fulwani, D. DC bus voltage regulation in the presence of constant power load using sliding mode controlled DC-DC bi-directional converter interfaced storage unit. In Proceedings of the 2015 IEEE First International Conference on DC Microgrids (ICDCM), Atlanta, GA, USA, 7–10 June 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 257–262. [Google Scholar]
- Singh, S.; Fulwani, D. On design of a robust controller to mitigate CPL effect—A DC micro-grid application. In Proceedings of the 2014 IEEE International Conference on Industrial Technology (ICIT), Busan, Korea, 26 February–1 March 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 448–454. [Google Scholar]
- Padmanaban, S.; Blaabjerg, F.; Wheeler, P.; Ojo, J.O.; Ertas, A.H. High-voltage dc-dc converter topology for pv energy utilization—Investigation and implementation. Electr. Power Compon. Syst. 2017, 45, 221–232. [Google Scholar] [CrossRef]
- Liu, Z.; Liu, J.; Bao, W.; Zhao, Y. Infinity-norm of impedance-based stability criterion for three-phase ac distributed power systems with constant power loads. IEEE Trans. Power Electron. 2015, 30, 3030–3043. [Google Scholar] [CrossRef]
- Emadi, A. Modeling of power electronic loads in ac distribution systems using the generalized state-space averaging method. IEEE Trans. Ind. Electron. 2004, 51, 992–1000. [Google Scholar] [CrossRef]
- Sun, J. Small-signal methods for ac distributed power systems—A review. IEEE Trans. Power Electron. 2009, 24, 2545–2554. [Google Scholar]
- Karimipour, D.; Salmasi, F.R. Stability analysis of ac microgrids with constant power loads based on popov’s absolute stability criterion. IEEE Trans. Circuits Syst. II Express Briefs 2015, 62, 696–700. [Google Scholar] [CrossRef]
- Vavilapalli, S.; Padmanaban, S.; Subramaniam, U.; Mihet-Popa, L. Power balancing control for grid energy storage system in photovoltaic applications—Real time digital simulation implementation. Energies 2017, 10, 928. [Google Scholar] [CrossRef]
- Swaminathan, G.; Ramesh, V.; Umashankar, S.; Sanjeevikumar, P. Investigations of microgrid stability and optimum power sharing using robust control of grid tie pv inverter. In Advances in Smart Grid and Renewable Energy; Springer: Singapore, 2018; pp. 379–387. [Google Scholar]
- Zheng, Q.; Wu, F. Lyapunov redesign of adaptive controllers for polynomial nonlinear systems. In Proceedings of the American Control Conference (ACC ’09), St. Louis, MO, USA, 10–12 June 2009; IEEE: Piscataway, NJ, USA, 2009; pp. 5144–5149. [Google Scholar]
- Chung, W.-C.; Liaw, D.-C.; Chang, S.-T. The steering control of vehicle dynamics via a lyapunov redesign approach. In Proceedings of the 48th IEEE Conference on Decision and Control, 2009 Held Jointly with the 2009 28th Chinese Control Conference (CDC/CCC 2009), Shanghai, China, 15–18 December 2009; IEEE: Piscataway, NJ, USA, 2009; pp. 6321–6326. [Google Scholar]
- Memon, A.Y.; Khalil, H.K. Lyapunov redesign approach to output regulation of nonlinear systems using conditional servocompensators. In Proceedings of the American Control Conference, Seattle, WA, USA, 11–13 June 2008; IEEE: Piscataway, NJ, USA, 2008; pp. 395–400. [Google Scholar]
- Farrell, J.A.; Polycarpou, M.M. Adaptive Approximation Based Control: Unifying Neural, Fuzzy and Traditional Adaptive Approximation Approaches; John Wiley & Sons: Chichester, UK, 2006; Volume 48. [Google Scholar]
- Khalil, H.K. Noninear Systems; Prentice-Hall: Upper Saddle River, NJ, USA, 1996; Volume 2. [Google Scholar]
- Vilathgamuwa, D.; Zhang, X.; Jayasinghe, S.; Bhangu, B.; Gajanayake, C.; Tseng, K.J. Virtual resistance based active damping solution for constant power instability in ac microgrids. In Proceedings of the IECON 2011—37th Annual Conference on IEEE Industrial Electronics Society, Melbourne, Australia, 7–10 November 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 3646–3651. [Google Scholar]
- Tiwari, R.; Babu, N.R.; Arunkrishna, R.; Sanjeevikumar, P. Comparison between pi controller and fuzzy logic-based control strategies for harmonic reduction in grid-integrated wind energy conversion system. In Advances in Smart Grid and Renewable Energy; Springer: Berlin, Germany, 2018; pp. 297–306. [Google Scholar]
- Padmanaban, S.; Grandi, G.; Blaabjerg, F.; Wheeler, P.W.; Siano, P.; Hammami, M. A comprehensive analysis and hardware implementation of control strategies for high output voltage dc-dc boost power converter. Int. J. Comput. Int. Syst. 2017, 10, 140–152. [Google Scholar] [CrossRef]
- Padmanaban, S.; Daya, F.J.; Blaabjerg, F.; Wheeler, P.W.; Szcześniak, P.; Oleschuk, V.; Ertas, A.H. Wavelet-fuzzy speed indirect field oriented controller for three-phase ac motor drive–investigation and implementation. Eng. Sci. Technol. Int. J. 2016, 19, 1099–1107. [Google Scholar] [CrossRef]
- Febin Daya, J.L.; Subbiah, V.; Iqbal, A.; Padmanaban, S. Novel wavelet-fuzzy based indirect field oriented control of induction motor drives. J. Power Electron. 2013, 13, 656–668. [Google Scholar] [CrossRef]
- Febin Daya, J.; Subbiah, V.; Sanjeevikumar, P. Robust speed control of an induction motor drive using wavelet-fuzzy based self-tuning multiresolution controller. Int. J. Comput. Int. Syst. 2013, 6, 724–738. [Google Scholar] [CrossRef]
- Slotine, J.-J.E.; Li, W. Applied Nonlinear Control; Prentice Hall: Englewood Cliffs, NJ, USA, 1991; Volume 199. [Google Scholar]
- Slotine, J.-J.E. Sliding controller design for non-linear systems. Int. J. Control 1984, 40, 421–434. [Google Scholar] [CrossRef]
- Utkin, V.I. Sliding Modes in Control and Optimization; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Sastry, S.S. Nonlinear Systems: Analysis, Stability, and Control; Springer Science & Business Media: New York, NY, USA, 2013; Volume 10. [Google Scholar]
- Hung, J.Y.; Gao, W.; Hung, J.C. Variable structure control: A survey. IEEE Trans. Ind. Electron. 1993, 40, 2–22. [Google Scholar] [CrossRef]
- Ning-Su, L.; Chun-Bo, F. A new method for suppressing chattering in variable structure feedback control systems. IFAC Proc. Vol. 1989, 22, 279–284. [Google Scholar] [CrossRef]
- Loh, A.M.; Yeung, L. Chattering reduction in sliding mode control: An improvement for nonlinear systems. WSEAS Trans. Circuits Syst. 2004, 3, 2090–2097. [Google Scholar]
- Freeman, R.; Kokotovic, P.V. Robust Nonlinear Control Design: State-Space and Lyapunov Techniques; Springer Science & Business Media: Boston, MA, USA, 2008. [Google Scholar]
- Krishna S, M.; Daya JL, F.; Padmanaban, S.; Mihet-Popa, L. Real-time analysis of a modified state observer for sensorless induction motor drive used in electric vehicle applications. Energies 2017, 10, 1077. [Google Scholar] [CrossRef]
- Sanjeevikumar, P.; Febin Daya, J.L.; Wheeler, P.; Blaabjerg, F.; Fedák, V.; Ojo, J.O. Wavelet Transform with Fuzzy Tuning Based Indirect Field Oriented Speed Control of Three-Phase Induction Motor Drive. In Proceedings of the 2015 International Conference on Electrical Drives and Power Electronics (EDPE), Tatranska Lomnica, Slovakia, 21–23 September 2015; pp. 111–116. [Google Scholar]
- Hosseyni, A.; Trabelsi, R.; Iqbal, A.; Sanjeevikumar, P.; Mimouni, M.F. An Improved Sensorless Sliding Mode Control/Adaptive Observer of a Five-Phase Permanent Magnet Synchronous Motor Drive. Int. J. Adv. Manuf. Technol. 2017, 93, 1–11. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| X3 | |||
| X4 | 50 V | ||
| 50 A | |||
| 20 A | |||
| 0.5 × 10−3 H | 10 × 10−6 F | ||
| RCVL | 15 Ohm | LCVL | 5 × 10−3 H |
| RB | 10 Ohm | CB | 1 × 10−6 F |
| LB | 1 × 10−3 H |
| Conditions | Parameter | Mean Squared Error | Relative Error (SMC-LRC) | |
|---|---|---|---|---|
| SMC | LRC | |||
| Noise Rejection (normal condition) | X3, d-axis voltage | 0.00270320 | 0.00139074 | 1.31246 × 10−3 |
| X4, q-axis voltage | 0.00138790 | 0.00113038 | 2.5752 × 10−4 | |
| Noise Rejection (very noisy condition) | X3, d-axis voltage | 0.03661991 | 0.00139411 | 3.52258 × 10−2 |
| X4, q-axis voltage | 0.00818637 | 0.00112001 | 7.06636 × 10−3 | |
| Nonlinearity | X3, d-axis voltage | 0.00321589 | 0.00002730 | 3.18859 × 10−3 |
| X4, q-axis voltage | 0.00942499 | 0.00924679 | 1.782 × 10−4 | |
| Parameter Uncertainty | X3, d-axis voltage | 0.00116666 | 0.00011259 | 1.04076 × 10−3 |
| X4, q-axis voltage | 0.00126333 | 0.00017554 | 1.08779 × 10−3 | |
| Technique Name | Base of the Technique | Working Principle | Effectiveness |
|---|---|---|---|
| ISMC | Has a equal dimension to the state space | Control signal composed by a linear term with a continuous low excitation of the unmodeled dynamics | ** |
| HOSM | High-gain control with saturations used for overcoming the effect of chattering by approximation of the sign function within a boundary layer around the switching manifold | The order of the mode is determined by the smoothness of tangency of the sliding manifold | ** |
| T2FNNAS | Type-2 Fuzzy Neural Network | Based on the synthesis method Lyapunov, the adaptive FNN’s free parameters are tuned on-line | *** |
| SMESO | Extended state observer with active disturbance rejection control | Dramatically reduced chattering phenomenon on the control input channel with respect to Linear Extended State Observer | ** |
| FSMC | Low pass filter | Estimation of the sliding variable via a disturbance estimator | * |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hossain, E.; Perez, R.; Padmanaban, S.; Mihet-Popa, L.; Blaabjerg, F.; Ramachandaramurthy, V.K. Sliding Mode Controller and Lyapunov Redesign Controller to Improve Microgrid Stability: A Comparative Analysis with CPL Power Variation. Energies 2017, 10, 1959. https://doi.org/10.3390/en10121959
Hossain E, Perez R, Padmanaban S, Mihet-Popa L, Blaabjerg F, Ramachandaramurthy VK. Sliding Mode Controller and Lyapunov Redesign Controller to Improve Microgrid Stability: A Comparative Analysis with CPL Power Variation. Energies. 2017; 10(12):1959. https://doi.org/10.3390/en10121959
Chicago/Turabian StyleHossain, Eklas, Ron Perez, Sanjeevikumar Padmanaban, Lucian Mihet-Popa, Frede Blaabjerg, and Vigna K. Ramachandaramurthy. 2017. "Sliding Mode Controller and Lyapunov Redesign Controller to Improve Microgrid Stability: A Comparative Analysis with CPL Power Variation" Energies 10, no. 12: 1959. https://doi.org/10.3390/en10121959