Robust Speed Control of PMSM Using Sliding Mode Control (SMC)—A Review



1
Power Electronics and Renewable Energy Research Laboratory (PEARL), Department of Electrical Engineering, Faculty of Engineering, University of Malaya, Kuala Lumpur 50603, Malaysia
2
Faculty of Technical and Vocational, Sultan Idris Education University, Tanjong Malim 35900, Perak, Malaysia
3
Center of Research Excellence in Renewable Energy and Power Systems, King Abdulaziz University, Jeddah 21589, Saudi Arabia
4
Department of Electrical Engineering, Faculty of Engineering, University of Malaya, Kuala Lumpur 50603, Malaysia
*
Author to whom correspondence should be addressed.
Energies 2019, 12(9), 1669; https://doi.org/10.3390/en12091669
Submission received: 22 November 2018
/
Revised: 13 January 2019
/
Accepted: 18 January 2019
/
Published: 1 May 2019
(This article belongs to the Special Issue Automation, Control and Energy Efficiency in Complex Systems)
Abstract
:Permanent magnet synchronous motors (PMSMs) are known as highly efficient motors and are slowly replacing induction motors in diverse industries. PMSM systems are nonlinear and consist of time-varying parameters with high-order complex dynamics. High performance applications of PMSMs require their speed controllers to provide a fast response, precise tracking, small overshoot and strong disturbance rejection ability. Sliding mode control (SMC) is well known as a robust control method for systems with parameter variations and external disturbances. This paper investigates the current status of implementation of sliding mode control speed control of PMSMs. Our aim is to highlight various designs of sliding surface and composite controller designs with SMC implementation, which purpose is to improve controller’s robustness and/or to reduce SMC chattering. SMC enhancement using fractional order sliding surface design is elaborated and verified by simulation results presented. Remarkable features as well as disadvantages of previous works are summarized. Ideas on possible future works are also discussed, which emphasize on current gaps in this area of research.
1. Introduction
Permanent magnet synchronous motors (PMSMs) are widely used in low- to mid-power applications and high performance drives, e.g., robotics, electric vehicles and machine tools. They are preferred over brush-type motors and are gradually replacing induction motors in various fields of application due to their advantages such as compact structures, high air-gap flux density, high power density, high torque to inertia ratio, and high efficiency. However, PMSM systems are nonlinear and consist of time-varying parameters with high-order complex dynamics [1,2].
In recent years, field oriented control (FOC) of PMSMs has been a focus for many researchers. This technique simplifies the motor modeling, hence resulting in a simplified controller design. The stator current is decoupled into torque and flux producing components to allow independent control of both parameters as in DC motors [3]. FOC is used to achieve smooth starting, good acceleration and fast four-quadrant operation [4,5]. Compared to the direct torque control (DTC) method, the FOC approach results in lower torque and current ripple [6,7]. The FOC approach is the focused in this review.
For speed regulation of PMSMs, control structures usually employ cascaded control loops, which consist of an outer speed control loop and two inner current loops. The advantages of cascaded control architecture lie in better disturbance resistance ability and better set point response performance. In the speed-current cascaded control structure, the relationship between the speed output and the reference quadrature axis current are usually described by a first-order model. However, considering the possibility that the closed-loop performance might degrade due to vanishing relative differences in control periods between both loops, second-order model relationships were also proposed [8]. For high speed applications of PMSMs, integrated speed and current controllers were used to solve the problem of nonlinear coupling between speed and current [9].
High performance PMSM applications require their speed controllers to provide a fast response, precise tracking, small overshoot and strong disturbance rejection ability. Linear control algorithms, e.g., PI controllers, have been widely used for speed control of PMSMs, but the performance was unsatisfactory in terms of tracking ability and robustness [10]. Various nonlinear control methods have been proposed to enhance the speed control performance of PMSMs in different aspects. These methods include sliding mode control [1,4,8,11,12], predictive control [13,14], backstepping control [15], adaptive control [15,16,17,18,19], H∞ control [20], automatic disturbance rejection control [21] and artificial intelligence incorporated controllers [12,22].
Sliding mode control (SMC) is a class of variable structure system (VSS). Its theory was originated in the late 1950s in the former USSR by Prof. V. I. Utkin and Prof. S. V. Emelyanov [23,24]. The key idea of SMC is to reduce the complexity of high order systems to first order state variables, namely the sliding function and its derivative [25]. Sliding mode control is well known as a robust control method, which can guarantee excellent tracking although the system is exposed to internal parameter variations and external disturbances. Other than that, remarkable features of SMC are its high accuracy and simplicity. SMC has been successfully implemented in many fields [26,27,28,29,30,31,32] and applied to many other machine types other than PMSMs, e.g., induction motors [26,33,34,35], linear variable reluctance motors [36] and brushless DC motors [37,38]. SMC is applied to PMSMs directly for speed control, position control and efficiency as well as indirectly for observer design. This literature focuses on the application of SMC for speed control of PMSMs.
Challenges in SMC design are to ensure convergence of system state to sliding surface, to ensure control target achieved on sliding surface (i.e., error converge to zero, ensure robustness), to minimize reaching phase and to reduce chattering during sliding mode. Several sliding surface designs have been introduced for speed control of PMSM.
Lyapunov stability analysis is widely used to analyse the stability of the developed SMC controllers, where the stable convergence property is proven and evaluated. Several Lyapunov functions were chosen by researchers to be employed in the analysis, but typically the function in Equation (1) is chosen [4,39] with the conditions given in Equation (2). Reaching condition is satisfied when the condition in Equation (3) is met:
The main disadvantage of SMC methods is the chattering phenomenon they produce and high frequency switching near the sliding surface caused by the discontinuous control law in SMC design and from parasitic dynamics interactions [1,4,40]. Chattering can affect the system in terms of reducing control accuracy, resulting in high heat losses in electrical power circuits and high wear of moving mechanical parts [41].
This paper is organized as follows: Section 2 elaborates on various methods proposed by previous researchers to enhance SMC for PMSM speed control. The effectiveness of SMC enhancement using fractional order sliding surface design is verified through simulation results in Section 3. Discussion and conclusion are presented in Section 4 and Section 5, respectively.
2. Sliding Mode Controller Enhancement in PMSM Speed Control
Chattering phenomena in sliding mode control are said to be the main obstacle for SMC to become one of the significant discoveries in modern control theory [40]. Researchers have proposed various methods to overcome this issue, whereby in doing so, the controller’s performance in terms of disturbance rejection properties and/or tracking was also affected, either in an advantageous or deteriorative way. Conversely, the proposed controller enhancement methods also determine the resulting chattering phenomena.
2.1. Sliding Surface Design Modification
New sliding surface designs have been proposed in many previous works in order to enhance the performance of SMC instead of using the conventional linear sliding surface. Linear sliding surface as in Equation (4) guarantees sliding mode asymptotic stability with convergence rate depending on the value of c [11]. The remarkable advantage of this design is its simplicity. However, the performance of conventional linear sliding surfaces is proven to be less satisfactory in terms of convergence rate and settling time [1,42]. The dynamic response of a closed loop system can be improved by using nonlinear sliding surfaces. For PMSM speed control, several works have been executed using linear SMC, but the drawbacks of linear SMC were overcame by means of hybridization to develop a composite SMC controller [8,43,44] or modification of the reaching law [11].
2.1.1. Integer Order Integral SMC
In conventional sliding mode control, the robustness of the system against parameters variation and external disturbances is achieved in the sliding phase. Prior to that, i.e., during the reaching phase, the robustness is not guaranteed. Integral sliding mode control (ISMC) (Equation (5)) was introduced by Utkin and Jingxin [45] to overcome this problem by eliminating the reaching phase, therefore, sliding phase is enforced throughout the entire system response. Furthermore, the order of motion equation in integral SMC is not reduced by the control input dimension, but equal to the order of the original system. The control law consists of a continuous nominal control and discontinuous control, which is responsible for the performance of the nominal system without perturbations and for rejecting perturbations respectively. Hence, with this type of SMC, system robustness can be guaranteed from the initial time. In addition, smaller maximum control magnitude is required for ISMC than conventional SMC since the value is usually bigger during the reaching phase [46,47].
In PMSM speed control, constructing a conventional sliding surface requires both speed and acceleration signals. However, acceleration signals are usually immeasurable and difficult to accurately estimate due to noise and parameter uncertainties. Integral sliding mode solves this issue and avoids degradation of the system closed loop performance [48]. As far as speed control of PMSM is concerned, ISMC has proven to result in better speed response compared to conventional PI in terms of overshoot, response time and steady-state error. In their simulation, Song and Jia [49] proved a smaller speed drop by 87.5% under load disturbance when using ISMC, compared to a PI controller. Similarly, an improved speed drop by almost 29% was observed in experiment executed by Zaky [50]. However, a better result of 4% speed drop was obtained when using a tuned ISMC, concluding that good robustness is only ensured when ISMC gain is carefully tuned. The drawback of ISMC is the difficulty of parameter tuning of its gain, which is required to ensure good balance between disturbance rejection property of the controller and the chattering phenomenon. This drawback was overcome using various techniques such as using linear varying gain and extended state observer [48] or using gain tuning methods [50].
2.1.2. Fractional Order SMC
Another nonlinear sliding surface design method is the fractional order sliding surface, which utilizes fractional calculus in constructing its sliding surface. Fractional calculus emerged theoretically over 300 years ago, but in recent decades it has been applied practically in a wide range of science and engineering disciplines [51]. It is a generalization of the traditional integer order integration and differentiation to the non-integer order. Fractional order terms have the property of attenuating old data and storing new data, hence they are more stable or at least as stable as their integer order counterparts [4,52]. Fractional calculus has been extensively integrated with classical PID control theory to come out with fractional PID controllers indicated as PIλDµ [53,54,55]. Other fractional order controller includes fractional adaptive controllers [56,57], fractional order compensators [58,59,60,61], fractional order sliding mode observer [62] and fractional order sliding mode control (FOSMC) [62,63,64,65].
Various hybrid FOSMC methods have been implemented in nonlinear systems. Delavari, et al. [64] compared the performance of their genetic-based Fuzzy FOSMC with integer order SMC in their simulation study. It was proven that the proposed FOSMC resulted in faster tracking response, improved tracking performance, smoother control action, minimized chattering, minimized root mean square errors, robust against model parameter uncertainties and is appropriate for practical application for nonlinear systems with parameter variations. Zhang, et al. [4] have experimentally implemented FOSMC with fuzzy logic tuning for speed control of PMSM. The extra degree of freedom of integral and differential operators can improve the controller’s performance further compared to traditional integer order SMC (IOSMC). Theoretically, fractional order sliding surfaces experience slower energy transfer during switching, hence resulting in smaller chattering compared to integer order sliding surfaces which decay towards zero exponentially (Figure 1). Experimentally, FOSMC has been proven to achieve better control performance with smaller chattering and robust against external load disturbance and parameter variations compared to IOSMC. Similar simulation result was obtained by Huang, et al. [5]. The superior performance of FOSMC for applications in induction motors was elaborated and compared with a few other SMC controllers in Sun, et al. [66].
Taking advantage of both integral SMC and fractional order integral, composite integral SMC was developed for position control of PMSM. The feedforward compensation part that consists of a fractional integral term in the control law ensures timely generation of control output during start-up or load disturbance by eliminating the integral saturation effect without having to increase the switching gain. In addition to the ability to suppress disturbance, the additional term also weakens the chattering phenomenon during sliding mode [52]. Implementation of similar composite controller for speed control of PMSM would also result in a robust, chattering-free system. Implementations of FOSMC in PMSM speed control need to consider the proper selection of the order, which lies between 0 and 1, proper determination of the frequency band for fractional order operator approximation and selection of either fractional integration, fractional differentiation or both as a sliding surface design method.
2.1.3. Terminal SMC
Terminal sliding mode (TSM) control utilizes terminal sliding surfaces in which fractional power is introduced to ensure fast and finite-time states convergence during the sliding mode phase. Near the equilibrium point, rate of convergence will speed up which makes this controller preferred for high precision control. The drawback of conventional terminal SMC Equation (7) is its singularity problem that might occur if the initial conditions are not carefully selected, due to the recursive structure of switching manifolds [1,67,68]. Singularity in TSM was overcame by using two-phase control strategy by inducing the system state into a non-singular region, prior to finite time convergence control [69]. In [70], non-singularity was ensured by switching between TSM and linear hyperplane based sliding mode. However, as the boundary decreases to zero, the singularity effect is not fully eliminated. Furthermore, when the boundary is relatively large, the advantage of TSM is diminished [67].
Non-singular terminal sliding mode controller (NTSM, Equation (8)) was proposed to completely eliminate the singularity problem of conventional terminal sliding mode control and applied to robot manipulators [30,67,71] and other systems [28,72]. Mu and He [73] proposed two new definitions and theorems to specifically characterize the dynamic behavior of TSM and NTSM for nonlinear systems. NTSM was applied for PMSM speed control and resulted in shorter settling time, better anti-disturbance ability, smaller tracking error and smaller chattering compared to conventional SMC [1,74,75]. However, controller enhancement still involves setting the switching gain at higher value as per in SMC. Hence, large chattering cannot be avoided due to discontinuity term in order to improve the controller performance. Another drawback lies in providing good convergence especially when the system state is far from equilibrium [42]. Furthermore, improper parameter selection of NTSM can affect its convergence rate when its performance approaches that of linear SMC [76]. Several works aimed to overcome these drawbacks using composite NTSM controllers [77,78] as well as proposing a design principle of controller variables based on homogeneity analysis [77].
Another type of terminal sliding mode controller proposed in the literature is the non-singular fast terminal sliding mode (NFTSM) controller Equation (9). NFTSM retains the advantages of NTSM but with a faster state convergence. Near equilibrium, the convergence rate of linear sliding mode remains constant while the convergence rate of NFTSM grows exponentially [76]. NFTSM has been applied for various control applications [79,80,81,82,83,84] and has shown not only faster convergence, but also stronger robustness, higher precision and lower chattering compared to conventional SMC.
NFTSM implemented for speed control of PMSM has proven that singularity problem of TSM is successfully avoided and faster convergence is obtained [85]. Thorough research on application of NFTSM for PMSM speed control is still unavailable. However, for position control of PMSM, NFTSM was used to reduce the chattering phenomenon and provide better position tracking and convergence rate compared to a PD controller [42]. Similar result is expected if NFTSM is applied for PMSM speed control. This style of numbering is only for equations and none are given
2.2. Higher Order SMC
Higher order sliding mode control (HOSMC) was first introduced by Levant [86]. In first order SMC, the selected sliding surface has a relative degree one with respect to the control input. The control input acts on the first derivative of the sliding surface. In higher order SMC, the control input acts on higher derivatives of the sliding surface. A sliding mode is defined as n-th order sliding mode when Equation (10) is satisfied [39]. The n-th derivative is predominantly supposed to be discontinuous or nonexistent [87]. The sliding order characterizes the system dynamics in the vicinity of the sliding mode in terms of degree of smoothness [88]. In literatures, various sliding surface types were used in designing their HOSMC. Reset numbering
When compared to first order SMC, HOSMC provides smoother control, better performance in terms of switching delays in control implementation, eliminates the requirement of derivative information for the control and is better in chattering effects suppression while still preserving the main advantages of the conventional SMC approach in terms of robustness and easiness of implementation [86,89,90]. On the other hand, the challenge in HOSMC lies in the usage of differentiators, where their practical behavior requires particular care in real implementation due to measurement noise. The deteriorative effects on overall closed loop performance increase dramatically with the number of differentiation stages [91].
For second order SMC (SOSMC), the main idea is not only to have the sliding surface at zero but also its first order derivative. Its control acts on the first derivative of the sliding surface. Second order sliding mode satisfies Equation (11). Different algorithms were proposed in literature to ensure SOSMC finite time convergence to zero such as suboptimal [92], twisting, super-twisting [93,94], drift and algorithm with a prescribed law of variation of s [88]. Robustness issues of second order SMC, e.g., influences of measurement noise and unmodelled fast actuator dynamics, have been described in details by Levant and Fridman [95] and Bartolini, et al. [91].
Second order SMC has been implemented in many systems [96,97,98,99,100,101] and for many machine types, e.g., DC motors [39,93,102], PMSM [103], induction motors [104] and induction generators [105,106]. For speed control of PMSM, SOSMC resulted in smaller output deviations, smaller convergence time of up to 66% and smaller chattering in comparison with first order SMC [94,107,108]. Chattering reduction property of SOSMC has been detailed by Bartolini, et al. [109]. Chattering analysis approach for systems with second order sliding mode control has been proposed by Boiko, et al. [110], where it can be applied to perform an in depth analysis of chattering for better comparison between SOSMC and first order SMC.
2.3. Reaching Law Method
The reaching law method aims to eliminate the chattering caused by non-ideal reaching at the end of the reaching phase. In sliding mode control, reaching law is the differential equation that specifies the dynamics of a switching function. Several types of reaching law proposed in the literature are constant rate, constant plus proportional rate, power rate, etc., where each has its own merits and demerits [111]. Conventionally, a constant rate signum function is used as reaching law. The boundary layer method is a common approach to alleviate chattering, where a smooth approximation is used to replace the sign function when the state trajectories lie within a certain boundary layer of the switching surface e.g., using saturation function [64] or hyperbolic tangent function [39]. However, this method sacrifices the system’s anti-disturbance performance [1,40] and causes steady-state error depending on boundary layer selection [99].
A novel exponential reaching law was proposed by Ke, et al. [9] for PMSM speed control. Absolute value of system state variable was incorporated in conventional exponential reaching law, so that the speed of convergence depends on how far the state variable is from the sliding surface. When sliding surface is reached, trajectory will become stable and allow the chattering phenomenon to be suppressed during sliding phase. However, the robustness of the controller is reduced and reaching time increases as the state approaches the sliding surface [11].
Chattering can also be minimized by decreasing the switching gain, but then the controller’s reaching time will be jeopardized. To find a balance between these two parameters in different phases of SMC, Xiaoguang, et al. [11] proposed a novel reaching law that still uses the typical signum function as reaching law, but with a modified gain. Instead of a constant gain, the proposed gain adapts to sliding mode surface and system states variations. In the early stage of the reaching phase, a higher gain expedites the reaching time. As the system trajectory approaches the sliding surface, the gain will gradually decrease to zero in order to suppress chattering. The width of sliding mode band decreases as the system state decreases until it reaches an equilibrium point, hence effectively limiting the chattering effect of the SMC (Figure 2). Under disturbance-free conditions, chattering suppression of more than 50% was recorded. Moreover, the convergence rate of the proposed SMC can be improved by about 90%. For a similar purpose, Zhang, et al. [112] eliminated the usage of the signum function in the reaching law and incorporated a terminal attractor term. However, chattering reduction was not clearly quantitatively documented and compared. A modified gain sliding surface was proposed by Jamoussi, et al. [113] for application in induction motors and their experimental results show a significant reduction in chattering.
2.4. Disturbance Compensation
In standard sliding mode control theory, disturbances can be rejected completely when the selected switching gain is larger than the upper bound of disturbances. However, in practical applications, the upper bound of disturbances is hard to obtain. Hence, a high value of the switching gain is normally chosen to ensure disturbance rejection, which case will result in unwanted large chattering [8]. Several methods have been proposed to deal with this issue. An adaptive algorithm was incorporated to SMC for position control of PMSM in order to estimate the bound of disturbances and reduce the control effort [114]. However, the aforementioned proposed solution suffers from chattering problems [8]. Another proposal was by using a boundary layer method [115], which unfortunately sacrifices the disturbance rejection properties of the SMC to some extent.
In addition to the conventional feedback part, a feed-forward compensation part is introduced into the controller to improve the disturbance rejection performance of a system. The compensation part needs to be estimated, since direct measurement of the disturbances in PMSM applications is usually impossible. The estimated disturbance can be conventionally fed to the controller but fast suppression is not guaranteed. Moreover, in cases of severe disturbances, the system’s performance can degrade tremendously [1]. Disturbance compensation allows a smaller value of switching gain to be selected since the gain value needs to be more than the bound of the disturbance compensation error instead of the lumped disturbances, which is usually larger. Hence, the disturbance rejection property of the controller is ensured without worsening the chattering effect [8]. Various disturbance estimation techniques as detailed in Chen, et al. [116] have been proposed in other fields [117,118,119], but for PMSM applications, disturbance observer and extended state observer are widely used.
In extended state observers (ESO), the lumped disturbances of the system (external disturbances and internal dynamics) are regarded as a new state of the system. ESO can estimate the states as well as the disturbances and its order is one magnitude higher than usual state observer. ESO was proposed by Jingqing [120] and has been incorporated in SMC for control in various fields [121]. SMC + ESO for speed control of PMSM has been experimentally proven to result in low speed drop (about 1%) under load disturbance of 2 Nm and lower chattering (by nearly 40%) compared to pure SMC controller [8].
The disturbance observer (DOB) was originated by Ohnishi [122]. Disturbance observer-based SMC has been widely applied in various fields to improve the SMC in terms of disturbance rejection performance and chattering [123,124,125]. Implementing sliding mode theory into the observer, extended sliding mode disturbance observer (ESMDO) was developed by Xiaoguang, et al. [11] to provide the compensation part of their SMC. Estimated disturbance suffers from chattering since the observer is designed based on sliding mode and in this work it was suppressed using a low pass filter. The proposed composite SMC + ESMDO controller has better disturbance rejection ability than PI controller, with smaller overshoot and shorter settling time. Quantitatively, under a load disturbance of 4 Nm, the speed drop of the proposed controller was reduced by 75%, overshoot was reduced by 50% and settling time was 60% shorter. A more relevant comparison was made between SMC with sliding mode-based disturbance observer and SMC without observer, where the composite SMC showed smaller overshoot, better robust stability and reduction in the effect of random load on the system [78]. Similarly, performance of a DOB-based nonsingular terminal SMC controller was compared with a conventional nonsingular terminal SMC by Mu, et al. [77]. Both their simulation and experimental approaches showed that their proposed composite DOB-based SMC controller resulted in faster speed response with a tracking error of less than 0.2% and overshoot reduction by 50%. Furthermore, a remarkable improvement in current chattering was recorded, speed ripple was reduced by 80% as well as better robustness against step load torque compared to a conventional NTSM controller. The success in SMC controller enhancement through observers depends on how exact and quick the estimation can be obtained, which requires the parameters to be selected carefully. Furthermore, the parameters selected must also ensure that the reachability condition of the main SMC controller is satisfied.
2.5. Artificial Intelligence
Integration of artificial intelligence (AI) into SMC provides breakthrough to the sliding mode theory that has been studied for over 50 years. Composite SMC and computational intelligence controllers have been summarized technically by Kaynak, et al. [126], who discussed the possible ways of integration and by Xinghuo and Kaynak [90], who emphasized the individual advantages and disadvantages of integrating various AI methods into SMC. AI was incorporated in sliding mode controllers for various purposes such as combined with SMC to enhance the controller’s performance, utilized the advantage of SMC to enhance main AI controllers, used for online or offline parameter tuning of a SMC controller, as uncertainties estimator and also to eliminate chattering. Several works have combined SMC, AI and adaptive control technique. The main advantages of adaptive control technique that researchers tried to bring to their controllers are their independence from precise prior knowledge of dynamic parameters, ability to effectively suppress errors caused by parameter uncertainties and also the ability to neutralize to some extent the influence of SMC high-frequency switching [127].
2.5.1. Fuzzy Logic
Fuzzy logic was proposed by Zadeh [128]. The main advantage of fuzzy logic is that it uses linguistic information instead of mathematical tools to model complex industrial processes. Memory capacity remains its biggest drawback, especially when high sensitivity of output is required. Composite fuzzy sliding mode controllers have been implemented in various fields [129,130,131,132,133,134,135]. For speed control of PMSM, fuzzy logic inference scheme (FLIS) was implemented to obtain the switching control gain of a fractional order SMC. This online tuning method has proven reliable in resulting a robust controller under various disturbance conditions [4]. Usage of fuzzy logic inference systems to obtain a gain requires the membership function to be sufficiently intensive for precision as well as wide enough to minimize the sensitivity to noise [136]. On the other hand, a composite fuzzy SMC was designed, whereby sliding mode properties can improve the performance of a conventional pure fuzzy controller. The control output was obtained by FLIS, depending on three sliding conditions (approaching, sliding and stable). Since the input variable of the fuzzy inference rules is defined by the sliding surface, the number of fuzzy rules can be minimized [137]. The proposed controller improved the performance of a pure fuzzy controller in terms of eliminating overshoot, settling time, tracking precision and steady-state error elimination [138]. Fuzzy adaptive mechanism was used to tune an integral SMC controller switching gain with respect to load torque. This method resulted in speed output without overshoot, steady-state error and chattering compared to a conventional ISMC without fuzzy [139]. For comparison purposes, similar performance was obtained when applying fuzzy SMC to an induction motor [140].
2.5.2. Neural Network
Neural networks have characteristics of fault tolerance, parallelism and learning [141]. NN-based SMC has been widely used as controller in various applications [142,143,144,145,146]. Wavelet NN (WNN) is developed by combining wavelets with neural networks. It combines online learning ability of artificial NN and identification ability of wavelet decomposition [12]. Its remarkable characteristics are quick convergence and high precision with reduced network size [147]. For speed control of PMSM, uncertain system dynamics was predicted using a WNN bound observer to solve the issue of uncertainty bound in SMC design. This composite WNN-SMC controller allowed a robust speed control for a wide range of operating conditions as compared to a conventional PID controller [12].
2.5.3. Fuzzy Neural Network
Both fuzzy logic and neural networks are universal approximators. However, the different characteristics of each of them are complementary. Fuzzy neural network (FNN) improves fuzzy logic-based controllers in terms of the learning abilities. Hence, it is capable of fuzzy reasoning in handling uncertain information as well as has capability of artificial NN in learning from processes. A combination of fuzzy and neural network theories was also incorporated in SMC controllers in various fields [141,148]. A recurrent fuzzy neural network (RFNN) intelligent observer was designed and combined with a SMC controller to facilitate real-time adjustment of the upper bound of the lumped uncertainty for position control of PMSM. The proposed controller resulted in a robust position control with less chattering and smaller control effort compared with a total SMC without RFNN observer [149]. Elmas and Ustun [43] proposed a hybrid controller that consists of a SMC and a neuro-fuzzy controller (NFC) connected in parallel for PMSM speed control. The error band method is used to determine which controller needs to be activated at a certain time. SMC is active during transient mode to get a fast dynamic response whereas the NFC is active during steady-state mode to get a smooth, less chattering dynamic response. The idea is to use the advantages of both SMC and NFC as well as to eliminate the disadvantageous factors of both. Current chattering of the proposed hybrid controller is reduced by around 92% compared to a conventional SMC. However, speed response of hybrid controller is faster by more than 7% compared to a conventional SMC. The hybrid controller is also less sensitive to parameter variations and external load disturbances compared to a conventional NFC.
The wavelet fuzzy neural network (WFNN) estimator combines fuzzy and wavelet neural network theories to estimate the unknown lumped uncertainties online to enhance the performance of a sliding mode controller. When applied to a six-phase PMSM, experimental results proved that the WFNN can perform a reliable estimation of lumped uncertainty and WFNN-SMC controller resulted in smaller tracking errors compared to a PI controller and SOSMC without WFNN lumped uncertainty estimator [99] and an adaptive backstepping SMC without WFNN [150].
3. Fractional Order SMC for Speed Control of PMSM
This section elaborates on a fractional order sliding mode control with PID sliding surface design (FOSMC-PID) proposed for speed control of PMSM using FOC approach, as illustrated in Figure 3.
3.1. Field Oriented Speed Control of PMSM
In rotor rotating reference frame, the mathematical model of a PMSM is defined as below [4]:
where , are the d,q-axis stator voltages, respectively; , are the d,q-axis stator currents, respectively; , are the d,q-axis stator inductances, respectively; is the electric torque; is the equivalent d-axis magnetizing current; is the d-axis mutual inductance; is the pole pair; is the inverter frequency and is the rotor speed. , are the d,q-axis stator flux linkages, which are defined as:
Motor dynamics is described as:
where is the moment of inertia, is the viscous friction coefficient and is the load torque. In constant torque angle (CTA) control strategy (δ = 90°), d-axis stator current command, id is set to be zero. Electromagnetic torque in Equation (14) can be simplified as in Equations (19) and state equation of the servo drive is obtained as per Equations (20).
In this study, the main control problem is to ensure the motor speed, to track the desired speed command, asymptotically. For this purpose, the main speed controller i.e., the sliding mode controller provides an output in terms of q-axis stator current command, as the control input for the inner q-axis current controller. The speed tracking error, and its derivative are defined in Equations (21) and (22) respectively, where a, b, c, and are defined as in Equations (23)–(26) with as the time-varying value of the system parameters and is lumped uncertainty:
a = Bm/J, b = kt/J, c = TL/J
3.2. Design of FOSMC-PID
The proposed fractional PID sliding surface is defined in Equation (27), where is a fractional integration of order and is a fractional differentiation of order . By selecting , a classical integer order PID sliding surface is obtained. The control law in Equation (28) is adopted in this study. The equivalent control law in Equation (29) is obtained. Stability analysis of the proposed controller is detailed in [151]:
3.3. Simulation Results
The proposed controller is simulated in MATLAB/Simulink environment to evaluate its performance as a speed regulator. The PMSM model used primarily in this simulation is a three-phase Y-connected 1.93 kW motor with parameters as listed in Table 1. Fractional orders α and β of the designed controller was chosen to be 0.35 and 0.3, respectively.
3.3.1. Performance Comparison of Fractional Order SMC with Conventional Integer Order SMC
The performance of the proposed fractional order SMC is compared with the conventional integral SMC. Reference speed of 500 rpm was set and load torque of 2 Nm was applied at t = 0.5 s. Results in Figure 4 show that drive system with SMC speed controller experienced 9.22% overshoot, which was 10 times higher than the overshoot of the FOSMC system.
The recorded settling time for SMC system was more than 30 times longer than FOSMC system. When load torque was applied, SMC system suffered from speed drop of almost the same as those of FOSMC system. However, it took almost 25 times longer time to settle back to the reference speed compared to the FOSMC system. Furthermore, in system with conventional SMC, 10 times higher speed ripple was observed.
3.3.2. Performance Comparison of Fractional Order SMC with Different Sliding Surface Designs (PI, PD and PID)
In this work, a fractional PID sliding surface was proposed to construct the sliding mode controller. The performance of the proposed sliding surface design is compared with PI and PD sliding surface. Similarly, reference speed was set at 500 rpm and load torque of 2 Nm was applied at t = 0.5 s. From Figure 5, it can be seen that FOSMC with PID sliding surface resulted in better speed response with almost 19 times less overshoot than FOSMC with PI sliding surface. When load torque of 2 Nm was applied, FOSMC-PI experienced a speed drop of 4%, which is 2.8% more than the speed drop of a FOSMC-PID system. After the speed drop, the FOSMC-PI system settled back to reference speed after almost 0.01 s, whereas the FOSMC-PID settled faster by one fifth. In terms of torque ripple, the performance of FOSMC-PID was prominent, where the resulting torque ripple was half of the torque ripple of FOSMC-PI. Figure 6 shows that FOSMC-PD resulted in no overshoot compared to FOSMC-PID. However, its settling time was almost nine times longer than FOSMC-PID. In addition to that, FOSMC-PD had a larger steady state error of almost three times higher than FOSMC-PID. Torque ripple of both controllers was almost equal.
In its own fractional order SMC group, the proposed FOSMC-PID has shown its advantages in balancing the individual strength and weaknesses of FOSMC-PI and FOSMC-PD. The proposed FOSMC reduced the overshoot contributed by the integral portion and at the same time reduce the steady state error contributed by the differential portion. The combination of PID also reduces the speed drop when the load torque was applied. Small speed and torque ripple proves that chattering phenomenon has been successfully suppressed. Performance indices of the proposed controller and the controllers in comparison are summarized in Table 2.
3.3.3. Performance of the Proposed FOSMC Speed Controller for Various Conditions
The controller is then tested for various conditions to ensure its robustness. Figure 7 shows the controller performance when reference speeds of 100 to 3000 rpm are given. The reference speed is tracked with settling time not more than 0.2 s and with overshoot not more than 2%. On a different case, various load torque (2–6 Nm) are given to the system at t = 0.5 s and the speed reference is fixed at 500 rpm. Figure 8 shows that the controller is able to track back the reference speed after speed drop of less than 13%. The proposed controller is also tested for a few motor sizes. As shown in Figure 9, the proposed controller ensures successful speed tracking for motors between 1.67 kW and 13.22 kW. The performance of the proposed controller is further validated and compared with performance of SMC under different scenarios. Figure 10 shows the speed response of system when positive loads of 2 Nm (at t = 0.5 s) and 6 Nm (at t = 1.0 s) as well as negative loads of −4 Nm (at t = 1.5 s) are applied. The speed response for both positive and negative reference speeds of 500 rpm, −500 rpm and −1000 rpm at t = 0.0 s, t = 0.5 s and t = 1.0 s respectively is shown in Figure 11. In this case, a load torque of 2 Nm is applied at t = 1.5 s.
Simulation results proved that the proposed FOSMC speed controller performs as a robust and fast anti-disturbance controller to regulate the speed of a PMSM and proven its advantages against SMC controllers. The proposed sliding surface design also improves the FOSMC in terms of torque ripple reduction, chattering reduction and anti-disturbance properties, compared to FOSMC with PI or PD sliding surface. Its robustness is also proven for various conditions such as for various speed references, various load torques and various motor sizes.
4. Discussion
Sliding mode control possesses many remarkable features to be applied in designing a robust and precise speed controller for permanent magnet synchronous motors. Sliding surface design and the chosen reaching law determine the equivalent control law that should result in system state’s convergence to sliding surface and control target achieved on the sliding surface as well as should ensure that reaching phase is minimized and chattering effect is attenuated. In addition to pure SMC controllers, controller’s performance is enhanced in terms of robustness and chattering reduction by many means. The main idea behind composite SMC is to have an adaptive sliding surface design based on uncertainties and disturbances, compared to a sliding surface design with fix values in conventional SMC. State-of-the-art implementation of SMC for speed control of PMSM is summarized in Figure 12 and compared in terms of their remarkable properties and disadvantages in Table 3.
As far as SMC for PMSM speed control is concerned, opportunities of future works are still wide open. The lists of sliding surface designs and composite sliding mode controllers that have been successfully applied to other machines but have not been applied for speed control of PMSM are endless. Similar good results are not guaranteed but they are worth to be researched on. It is also necessary to mention that more research works is required in the area of SMC parameter tuning, since many researchers still based their work on conventional trial and error method. A new promising approach to optimise parameter tuning is by using adaptive SMC to ensure a dynamical adaptation of the control gain in order to be as small as possible whereas sufficient to counteract the uncertainties/perturbations [152,153,154,155,156,157,158]. For PMSM application, disturbance estimation techniques are mostly constraint at either DOB or state observer. This situation opens the opportunity for future researchers to explore the combination of SMC with other estimation techniques.
Many composite SMC controllers have been proposed, but researchers should not compromise one of the remarkable features of SMC namely its simplicity. Integration of artificial intelligence into SMC in order to produce an ‘intelligent’ controller should not jeopardize the controller’s speed. Information on chattering effect is crucial in presenting SMCs. In several literatures, the chattering effect of their proposed controllers was not carefully presented or simply not addressed. It can be concluded that what remains in designing a SMC for speed control of PMSM is to find balance between the robustness and the chattering for wide range of operating conditions.
5. Conclusions
An extensive review of the state-of-the-art implementation of SMC for speed control of PMSMs is presented in this paper. Various sliding surface designs and composite controller designs with SMC implementation have been highlighted. The remarkable properties as well as the disadvantages of previous works are summarized. Ideas on possible future works are also discussed, which emphasize on current gaps in this area of research. Certain areas have not been thoroughly covered in this study and deserve a separate thorough review e.g. the application of sliding mode controllers in sensorless speed control of PMSMs, the application of SMC for DTC control of PMSMs and sliding mode observers in combination with other controllers for speed control of PMSMs.
Author Contributions
Conceptualization, F.M.Z., S.M. and M.M.; Methodology, F.M.Z., S.M. and M.M.; Software, F.M.Z.; Validation, F.M.Z., S.M. and M.M.; Formal Analysis, F.M.Z., S.M. and M.M.; Investigation, F.M.Z., S.M. and M.M.; Resources, F.M.Z., S.M. and M.M.; Data Curation, F.M.Z., S.M. and M.M.; Writing-Original Draft Preparation, F.M.Z.; Writing-Review & Editing, F.M.Z., S.M. and M.M.; Visualization, F.M.Z., S.M. and M.M.; Supervision, S.M. and M.M.; Project Administration, F.M.Z; Funding Acquisition, S.M. and M.M.
Funding
The authors would like to acknowledge the financial support received from the University of Malaya, Malaysia, through FRGS Grant No. FRGS/1/2018/TK07/UM/01/3, Frontier Research Grant No. FG007-17AFR and Postgraduate Research Grant (PPP) No. PG192-2015B.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Shihua, L.; Mingming, Z.; Xinghuo, Y. Design and Implementation of Terminal Sliding Mode Control Method for PMSM Speed Regulation System. IEEE Trans. Ind. Inform. 2013, 9, 1879–1891. [Google Scholar] [CrossRef]
- Pillay, P.; Krishnan, R. Modeling, simulation, and analysis of permanent-magnet motor drives. I. The permanent-magnet synchronous motor drive. IEEE Trans. Ind. Appl. 1989, 25, 265–273. [Google Scholar] [CrossRef]
- Abu-Rub, H.; Iqbal, A.; Guzinski, J. High Performance Control of AC Drives with Matlab/Simulink Models; Wiley: Hoboken, NJ, USA, 2012. [Google Scholar]
- Zhang, B.; Pi, Y.; Luo, Y. Fractional order sliding-mode control based on parameters auto-tuning for velocity control of permanent magnet synchronous motor. ISA Trans. 2012, 51, 649–656. [Google Scholar] [CrossRef] [PubMed]
- Huang, J.; Li, H.; Teng, F.; Liu, D. Fractional order sliding mode controller for the speed control of a permanent magnet synchronous motor. In Proceedings of the 24th Chinese Control and Decision Conference (CCDC), Taiyuan, China, 23–25 May 2012; pp. 1203–1208. [Google Scholar]
- Maleki, N.; Pahlavani, M.R.A.; Soltani, I. A Detailed Comparison Between FOC and DTC Methods of a Permanent Magnet Synchronous Motor Drive. J. Electr. Electron. Eng. 2015, 3, 92–100. [Google Scholar] [CrossRef]
- Garcia, X.D.T.; Zigmund, B.; Terlizzi, A.A.; Pavlanin, R.; Salvatore, L. Comparison between FOC and DTC Strategies for Permanent Magnet Synchronous Motors. Adv. Electr. Electron. Eng. 2011, 5. Available online: http://advances.utc.sk/index.php/AEEE/article/view/179 (accessed on 20 January 2019).
- Li, S.; Zong, K.; Liu, H. A composite speed controller based on a second-order model of permanent magnet synchronous motor system. Trans. Inst. Meas. Control 2011, 33, 522–541. [Google Scholar] [CrossRef]
- Ke, Z.; Xiao-guang, Z.; Li, S.; Chang, C. Sliding mode control of high-speed PMSM based on precision linearization control. In Proceedings of the International Conference on Electrical Machines and Systems (ICEMS), Beijing, China, 20–23 August 2011; pp. 1–4. [Google Scholar]
- Gou-Jen, W.; Chuan-Tzueng, F.; Chang, K.J. Neural-network-based self-tuning PI controller for precise motion control of PMAC motors. IEEE Trans. Ind. Electron. 2001, 48, 408–415. [Google Scholar] [CrossRef]
- Xiaoguang, Z.; Lizhi, S.; Ke, Z.; Li, S. Nonlinear speed control for PMSM system using sliding mode control and disturbance compensation techniques. IEEE Trans. Power Electron. 2013, 28, 1358–1365. [Google Scholar] [CrossRef]
- El-Sousy, F.F.M. Robust wavelet-neural-network sliding-mode control system for permanent magnet synchronous motor drive. IET Electr. Power Appl. 2011, 5, 113–132. [Google Scholar] [CrossRef]
- Huixian, L.; Shihua, L. Speed Control for PMSM Servo System Using Predictive Functional Control and Extended State Observer. IEEE Trans. Ind. Electron. 2012, 59, 1171–1183. [Google Scholar] [CrossRef]
- Errouissi, R.; Ouhrouche, M.; Wen-Hua, C.; Trzynadlowski, A.M. Robust nonlinear predictive controller for permanent magnet synchronous motors with an optimized cost function. IEEE Trans. Ind. Electron. 2012, 59, 2849–2858. [Google Scholar] [CrossRef]
- Zhou, J.; Wang, Y. Adaptive backstepping speed controller design for a permanent magnet synchronous motor. IEE Proc.—Electr. Power Appl. 2002, 149, 165–172. [Google Scholar] [CrossRef]
- Vu, N.T.-T.; Choi, H.H.; Jung, J.-W. Certainty equivalence adaptive speed controller for permanent magnet synchronous motor. Mechatronics 2012, 22, 811–818. [Google Scholar] [CrossRef]
- Shihua, L.; Zhigang, L. Adaptive speed control for permanent magnet synchronous motor system with variations of load inertia. IEEE Trans. Ind. Electron. 2009, 56, 3050–3059. [Google Scholar] [CrossRef]
- Han Ho, C.; Nga Thi-Thuy, V.; Jin-Woo, J. Digital Implementation of an Adaptive Speed Regulator for a PMSM. IEEE Trans. Power Electron. 2011, 26, 3–8. [Google Scholar] [CrossRef]
- Wang, Q.; Yu, H.; Wang, M.; Qi, X. A Novel Adaptive Neuro-Control Approach for Permanent Magnet Synchronous Motor Speed Control. Energies 2018, 11, 2355. [Google Scholar] [CrossRef]
- Hsien, T.L.; Sun, Y.Y.; Tsai, M.C. H∞ control for a sensorless permanent-magnet synchronous drive. IEEE Proc. Electr. Power Appl. 1997, 144, 173–181. [Google Scholar] [CrossRef]
- Su, Y.X.; Zheng, C.H.; Duan, B.Y. Automatic disturbances rejection controller for precise motion control of permanent-magnet synchronous motors. IEEE Trans. Ind. Electron. 2005, 52, 814–823. [Google Scholar] [CrossRef]
- Han Ho, C.; Jin-Woo, J. Discrete-Time Fuzzy Speed Regulator Design for PM Synchronous Motor. IEEE Trans. Ind. Electron. 2013, 60, 600–607. [Google Scholar] [CrossRef]
- Utkin, V. Variable structure systems with sliding modes. IEEE Trans. Autom. Control 1977, 22, 212–222. [Google Scholar] [CrossRef]
- Hung, J.Y.; Gao, W.; Hung, J.C. Variable structure control: A survey. IEEE Trans. Ind. Electron. 1993, 40, 2–22. [Google Scholar] [CrossRef]
- Fallaha, C.J.; Saad, M.; Kanaan, H.Y.; Al-Haddad, K. Sliding mode robot control with exponential reaching law. IEEE Trans. Ind. Electron. 2011, 58, 600–610. [Google Scholar] [CrossRef]
- Rong-Jong, W.; Kun-Lun, C.; Jeng-Dao, L. On-Line Supervisory Control Design for Maglev Transportation System via Total Sliding-Mode Approach and Particle Swarm Optimization. IEEE Trans. Autom. Control 2010, 55, 1544–1559. [Google Scholar] [CrossRef]
- Chih-Lyang, H.; Li-Jui, C.; Yuan-Sheng, Y. Network-Based Fuzzy Decentralized Sliding-Mode Control for Car-Like Mobile Robots. IEEE Trans. Ind. Electron. 2007, 54, 574–585. [Google Scholar] [CrossRef]
- Syuan-Yi, C.; Faa-Jeng, L. Robust nonsingular terminal sliding mode control for nonlinear magnetic bearing system. IEEE Trans. Control Syst. Technol. 2011, 19, 636–643. [Google Scholar] [CrossRef]
- Bao-Lin, Z.; Qing-Long, H.; Xian-Ming, Z.; Xinghuo, Y. Sliding Mode Control With Mixed Current and Delayed States for Offshore Steel Jacket Platforms. IEEE Trans. Control Syst. Technol. 2014, 22, 1769–1783. [Google Scholar] [CrossRef]
- Chuan-Kai, L. Nonsingular Terminal Sliding Mode Control of Robot Manipulators Using Fuzzy Wavelet Networks. IEEE Trans. Fuzzy Syst. 2006, 14, 849–859. [Google Scholar] [CrossRef]
- Jeng-Dao, L.; Suiyang, K.; Zhi-Bin, W. DSP-based sliding mode control for electromagnetic levitation precise position system. IEEE Trans. Ind. Inform. 2013, 9, 817–827. [Google Scholar] [CrossRef]
- Han, S.I.; Lee, J.M. Balancing and Velocity Control of a Unicycle Robot Based on the Dynamic Model. IEEE Trans. Ind. Electron. 2015, 62, 405–413. [Google Scholar] [CrossRef]
- Faa-Jeng, L.; Chih-Kai, C.; Po-Kai, H. FPGA-Based Adaptive Backstepping Sliding-Mode Control for Linear Induction Motor Drive. IEEE Trans. Power Electron. 2007, 22, 1222–1231. [Google Scholar] [CrossRef] [Green Version]
- El-Sousy, F.F.M. Adaptive Dynamic Sliding-Mode Control System Using Recurrent RBFN for High-Performance Induction Motor Servo Drive. IEEE Trans. Ind. Inform. 2013, 9, 1922–1936. [Google Scholar] [CrossRef]
- Veselic, B.; Perunicic-Drazenovic, B.; Milosavljevic, C. Improved Discrete-Time Sliding-Mode Position Control Using Euler Velocity Estimation. IEEE Trans. Ind. Electron. 2010, 57, 3840–3847. [Google Scholar] [CrossRef]
- Pupadubsin, R.; Chayopitak, N.; Taylor, D.G.; Nulek, N.; Kachapornkul, S.; Jitkreeyarn, P.; Somsiri, P.; Tungpimolrut, K. Adaptive Integral Sliding-Mode Position Control of a Coupled-Phase Linear Variable Reluctance Motor for High-Precision Applications. IEEE Trans. Ind. Appl. 2012, 48, 1353–1363. [Google Scholar] [CrossRef]
- Yaonan, W.; Xizheng, Z.; Xiaofang, Y.; Guorong, L. Position-Sensorless Hybrid Sliding-Mode Control of Electric Vehicles With Brushless DC Motor. IEEE Trans. Veh. Technol. 2011, 60, 421–432. [Google Scholar] [CrossRef]
- Jian-Bo, C.; Bing-Gang, C. Fuzzy-Logic-Based Sliding-Mode Controller Design for Position-Sensorless Electric Vehicle. IEEE Trans. Power Electron. 2009, 24, 2368–2378. [Google Scholar] [CrossRef]
- Eker, İ. Second-order sliding mode control with experimental application. ISA Trans. 2010, 49, 394–405. [Google Scholar] [CrossRef] [PubMed]
- Young, K.D.; Utkin, V.I.; Ozguner, U. A control engineer’s guide to sliding mode control. IEEE Trans. Control Syst. Technol. 1999, 7, 328–342. [Google Scholar] [CrossRef]
- Utkin, V.I. Sliding mode control design principles and applications to electric drives. IEEE Trans. Ind. Electron. 1993, 40, 23–36. [Google Scholar] [CrossRef] [Green Version]
- Qi, L.; Shi, H. Adaptive position tracking control of permanent magnet synchronous motor based on RBF fast terminal sliding mode control. Neurocomputing 2013, 115, 23–30. [Google Scholar] [CrossRef]
- Elmas, C.; Ustun, O. A hybrid controller for the speed control of a permanent magnet synchronous motor drive. Control Eng. Pract. 2008, 16, 260–270. [Google Scholar] [CrossRef]
- Yan, L.; Ju-Beom, S.; Jang-myung, L. PMSM speed controller using switching algorithm of PD and Sliding mode control. In Proceedings of the ICCAS-SICE, Fukuoka, Japan, 18–21 August 2009; pp. 1260–1266. [Google Scholar]
- Utkin, V.; Jingxin, S. Integral sliding mode in systems operating under uncertainty conditions. In Proceedings of the 35th IEEE Conference on Decision and Control, Kobe, Japan, 11–13 December 1996; pp. 4591–4596. [Google Scholar]
- Castanos, F.; Fridman, L. Analysis and design of integral sliding manifolds for systems with unmatched perturbations. IEEE Trans. Autom. Control 2006, 51, 853–858. [Google Scholar] [CrossRef]
- Liang, Y.W.; Ting, L.W.; Lin, L.G. Study of Reliable Control Via an Integral-Type Sliding Mode Control Scheme. IEEE Trans. Ind. Electron. 2012, 59, 3062–3068. [Google Scholar] [CrossRef]
- Xia, C.; Wang, X.; Li, S.; Chen, X. Improved integral sliding mode control methods for speed control of PMSM system. Int. J. Innov. Comput. Inf. Control 2011, 7, 1971–1982. [Google Scholar]
- Song, Q.; Jia, C. Robust Speed Controller Design for Permanent Magnet Synchronous Motor Drives Based on Sliding Mode Control. Energy Procedia 2016, 88, 867–873. [Google Scholar] [CrossRef] [Green Version]
- Zaky, M. Adaptive and robust speed control of interior permanent magnet synchronous motor drives. Electr. Eng. 2012, 94, 49–58. [Google Scholar] [CrossRef]
- Efe, M.O. Fractional Order Systems in Industrial Automation—A Survey. IEEE Trans. Ind. Inform. 2011, 7, 582–591. [Google Scholar] [CrossRef]
- Huang, J.; Cui, L.; Shi, X.; Li, H.; Xiang, Z. Composite integral sliding mode control for PMSM. In Proceedings of the 33rd Chinese Control Conference (CCC), Nanjing, China, 28–30 July 2014; pp. 8086–8090. [Google Scholar]
- Hongsheng, L.; Ying, L.; Yang Quan, C. A Fractional Order Proportional and Derivative (FOPD) Motion Controller: Tuning Rule and Experiments. IEEE Trans. Control Syst. Technol. 2010, 18, 516–520. [Google Scholar] [CrossRef]
- Lanusse, P.; Oustaloup, A.; Sabatier, J. Robust factional order PID controllers: The first generation CRONE CSD approach. In Proceedings of the International Conference on Fractional Differentiation and Its Applications 2014 (ICFDA), Catania, Italy, 23–25 June 2014; pp. 1–6. [Google Scholar]
- Zhang, B.T.; Pi, Y. Robust fractional order proportion-plus-differential controller based on fuzzy inference for permanent magnet synchronous motor. IET Control Theory Appl. 2012, 6, 829–837. [Google Scholar] [CrossRef]
- Efe, M.O. Fractional Fuzzy Adaptive Sliding-Mode Control of a 2-DOF Direct-Drive Robot Arm. IEEE Trans. Syst. ManCybern. Part B Cybern. 2008, 38, 1561–1570. [Google Scholar] [CrossRef]
- Ladaci, S.; Charef, A. On Fractional Adaptive Control. Nonlinear Dyn. 2006, 43, 365–378. [Google Scholar] [CrossRef]
- Luo, Y.; Chen, Y.; Ahn, H.-S.; Pi, Y. Fractional order robust control for cogging effect compensation in PMSM position servo systems: Stability analysis and experiments. Control Eng. Pract. 2010, 18, 1022–1036. [Google Scholar] [CrossRef]
- Salehtavazoei, M.; Tavakoli-Kakhki, M. Compensation by fractional-order phase-lead/lag compensators. IET Control Theory Appl. 2014, 8, 319–329. [Google Scholar] [CrossRef]
- Luo, Y.; Chen, Y.Q.; Ahn, H.S.; Pi, Y.G. Fractional Order Periodic Adaptive Learning Compensation for State-Dependent Periodic Disturbance. IEEE Trans. Control Syst. Technol. 2012, 20, 465–472. [Google Scholar] [CrossRef]
- Ying, L.; Yang Quan, C.; Hyo-Sung, A.; Youguo, P. Fractional order periodic adaptive learning compensation for cogging effect in PMSM position servo system. In Proceedings of the American Control Conference (ACC), St. Louis, MO, USA, 10–12 June 2009; pp. 937–942. [Google Scholar]
- Mujumdar, A.; Tamhane, B.; Kurode, S. Observer-Based Sliding Mode Control for a Class of Noncommensurate Fractional-Order Systems. IEEE/ASME Trans. Mechatron. 2015, PP, 1–9. [Google Scholar] [CrossRef]
- Calderón, A.J.; Vinagre, B.M.; Feliu, V. Fractional order control strategies for power electronic buck converters. Signal Process. 2006, 86, 2803–2819. [Google Scholar] [CrossRef]
- Delavari, H.; Ghaderi, R.; Ranjbar, A.; Momani, S. Fuzzy fractional order sliding mode controller for nonlinear systems. Commun. Nonlinear Sci. Numer. Simul. 2010, 15, 963–978. [Google Scholar] [CrossRef]
- Abdelhamid, D.; Bouden, T.; Boulkroune, A. Design of Fractional-order Sliding Mode Controller (FSMC) for a class of Fractional-order Non-linear Commensurate Systems using a Particle Swarm Optimization (PSO) Algorithm. J. Control Eng. Appl. Inform. 2014, 16, 46–55. [Google Scholar]
- Sun, G.; Wu, L.; Kuang, Z.; Ma, Z.; Liu, J. Practical tracking control of linear motor via fractional-order sliding mode. Automatica 2018, 94, 221–235. [Google Scholar] [CrossRef]
- Feng, Y.; Yu, X.; Man, Z. Non-singular terminal sliding mode control of rigid manipulators. Automatica 2002, 38, 2159–2167. [Google Scholar] [CrossRef]
- Liu, J.; Wang, X. Advanced Sliding Mode Control for Mechanical Systems: Design, Analysis and MATLAB Simulation; Springer: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Wu, Y.; Yu, X.; Man, Z. Terminal sliding mode control design for uncertain dynamic systems. Syst. Control Lett. 1998, 34, 281–287. [Google Scholar] [CrossRef]
- Man, Z.; Xing Huo, Y. Terminal sliding mode control of MIMO linear systems. IEEE Trans. Circuits Syst. I Fundam. Theory Appl. 1997, 44, 1065–1070. [Google Scholar] [CrossRef]
- Jin, M.; Lee, J.; Chang, P.H.; Choi, C. Practical Nonsingular Terminal Sliding-Mode Control of Robot Manipulators for High-Accuracy Tracking Control. IEEE Trans. Ind. Electron. 2009, 56, 3593–3601. [Google Scholar] [CrossRef]
- Zhang, R.; Dong, L.; Sun, C. Adaptive nonsingular terminal sliding mode control design for near space hypersonic vehicles. IEEE/CAA J. Autom. Sin. 2014, 1, 155–161. [Google Scholar] [CrossRef]
- Mu, C.; He, H. Dynamic Behavior of Terminal Sliding Mode Control. IEEE Trans. Ind. Electron. 2018, 65, 3480–3490. [Google Scholar] [CrossRef]
- Xu, W.; Jiang, Y.; Mu, C.; Yue, H. Nonsingular terminal sliding mode control for the speed regulation of permanent magnet synchronous motor with parameter uncertainties. In Proceedings of the 41st Annual Conference of the IEEE Industrial Electronics Society, IECON, Pattaya, Thailand, 9–12 November 2015; pp. 001994–001999. [Google Scholar]
- Liu, X.; Yu, H.; Yu, J.; Zhao, L. Combined Speed and Current Terminal Sliding Mode Control With Nonlinear Disturbance Observer for PMSM Drive. IEEE Access 2018, 6, 29594–29601. [Google Scholar] [CrossRef]
- Xinghuo, Y.; Man, Z. Fast terminal sliding-mode control design for nonlinear dynamical systems. IEEE Trans. Circuits Syst. I Fundam. Theory Appl. 2002, 49, 261–264. [Google Scholar] [CrossRef]
- Mu, C.; Xu, W.; Sun, C. On Switching Manifold Design for Terminal Sliding Mode Control. J. Frankl. Inst. 2016, 353. [Google Scholar] [CrossRef]
- Lu, E.; Li, W.; Yang, X.; Xu, S. Composite Sliding Mode Control of a Permanent Magnet Direct-Driven System For a Mining Scraper Conveyor. IEEE Access 2017, 5, 22399–22408. [Google Scholar] [CrossRef]
- Xu, S.S.D.; Chen, C.C.; Wu, Z.L. Study of Nonsingular Fast Terminal Sliding-Mode Fault-Tolerant Control. IEEE Trans. Ind. Electron. 2015, 62, 3906–3913. [Google Scholar] [CrossRef]
- Gudey, S.K.; Gupta, R. Recursive fast terminal sliding mode control in voltage source inverter for a low-voltage microgrid system. IET Gener. Transm. Distrib. 2016, 10, 1536–1543. [Google Scholar] [CrossRef]
- Komurcugil, H. Fast terminal sliding mode control for single-phase UPS inverters. In Proceedings of the IEEE International Symposium on Industrial Electronics, Gdansk, Poland, 27–30 June 2011; pp. 277–282. [Google Scholar]
- Mobayen, S. Fast terminal sliding mode tracking of non-holonomic systems with exponential decay rate. IET Control Theory Appl. 2015, 9, 1294–1301. [Google Scholar] [CrossRef]
- Al-Ghanimi, A.; Zheng, J.; Man, Z. Robust and fast non-singular terminal sliding mode control for piezoelectric actuators. IET Control Theory Appl. 2015, 9, 2678–2687. [Google Scholar] [CrossRef]
- Mu, C.; Sun, C.; Xu, W. Fast sliding mode control on air-breathing hypersonic vehicles with transient response analysis. Proc. Inst. Mech. Eng. Part I J. Sys. Control Eng. 2015, 230, 23–34. [Google Scholar] [CrossRef] [Green Version]
- Shuo, Z. Nonsingular fast terminal sliding mode control method and its application on permanent magnet synchronous motor. In Proceedings of the 34th Chinese Control Conference (CCC), Hangzhou, China, 28–30 July 2015; pp. 3383–3386. [Google Scholar]
- Levant, A. Sliding order and sliding accuracy in sliding mode control. Int. J. Control 1993, 58, 1247–1263. [Google Scholar] [CrossRef]
- Levant, A. Principles of 2-sliding mode design. Automatica 2007, 43, 576–586. [Google Scholar] [CrossRef] [Green Version]
- Bartolini, G.; Ferrara, A.; Levant, A.; Usai, E. On second order sliding mode controllers. In Variable Structure Systems, Sliding Mode and Nonlinear Control; Young, K.D., Özgüner, Ü., Eds.; Springer: London, UK, 1999; pp. 329–350. [Google Scholar]
- Khan, M.K.; Spurgeon, S.K. Robust MIMO water level control in interconnected twin-tanks using second order sliding mode control. Control Eng. Pract. 2006, 14, 375–386. [Google Scholar] [CrossRef]
- Xinghuo, Y.; Kaynak, O. Sliding-Mode Control With Soft Computing: A Survey. IEEE Trans. Ind. Electron. 2009, 56, 3275–3285. [Google Scholar] [CrossRef] [Green Version]
- Bartolini, G.; Pisano, A.; Punta, E.; Usai, E. A survey of applications of second-order sliding mode control to mechanical systems. Int. J. Control 2003, 76, 875–892. [Google Scholar] [CrossRef]
- Matraji, I.; Laghrouche, S.; Jemei, S.; Wack, M. Robust control of the PEM fuel cell air-feed system via sub-optimal second order sliding mode. Appl. Energy 2013, 104, 945–957. [Google Scholar] [CrossRef]
- Damiano, A.; Gatto, G.L.; Marongiu, I.; Pisano, A. Second-order sliding-mode control of DC drives. IEEE Trans. Ind. Electron. 2004, 51, 364–373. [Google Scholar] [CrossRef]
- Bounasla, N.; Hemsas, K.E. Second order sliding mode control of a permanent magnet synchronous motor. In Proceedings of the 14th International Conference on Sciences and Techniques of Automatic Control and Computer Engineering (STA), Sousse, Tunisia, 20–22 December 2013; pp. 535–539. [Google Scholar]
- Levant, A.; Fridman, L. Robustness issues of 2-sliding mode control. In Variable Structure Systems: From Principles to Implementation; Institution of Engineering and Technology: Stevenage, UK, 2004; pp. 131–156. [Google Scholar] [CrossRef]
- Bartolini, G.; Pisano, A.; Usai, E. Second-order sliding-mode control of container cranes. Automatica 2002, 38, 1783–1790. [Google Scholar] [CrossRef]
- Ling, R.; Maksimovic, D.; Leyva, R. Second-Order Sliding-Mode Controlled Synchronous Buck DC-DC Converter. IEEE Trans. Power Electron. 2016, 31, 2539–2549. [Google Scholar] [CrossRef]
- Ferrara, A.; Incremona, G.P. Design of an Integral Suboptimal Second-Order Sliding Mode Controller for the Robust Motion Control of Robot Manipulators. IEEE Trans. Control Syst. Technol. 2015, 23, 2316–2325. [Google Scholar] [CrossRef]
- Lin, F.J.; Hung, Y.C.; Ruan, K.C. An Intelligent Second-Order Sliding-Mode Control for an Electric Power Steering System Using a Wavelet Fuzzy Neural Network. IEEE Trans. Fuzzy Syst. 2014, 22, 1598–1611. [Google Scholar] [CrossRef]
- Ebrahimi, B.; Tafreshi, R.; Mohammadpour, J.; Franchek, M.; Grigoriadis, K.; Masudi, H. Second-Order Sliding Mode Strategy for Air-Fuel Ratio Control of Lean-Burn SI Engines. IEEE Trans. Control Syst. Technol. 2014, 22, 1374–1384. [Google Scholar] [CrossRef]
- Shtessel, Y.B.; Shkolnikov, I.A.; Levant, A. Guidance and Control of Missile Interceptor using Second-Order Sliding Modes. IEEE Trans. Aerosp. Electron. Syst. 2009, 45, 110–124. [Google Scholar] [CrossRef]
- Pisano, A.; Davila, A.; Fridman, L.; Usai, E. Cascade Control of PM DC Drives Via Second-Order Sliding-Mode Technique. IEEE Trans. Ind. Electron. 2008, 55, 3846–3854. [Google Scholar] [CrossRef]
- Laghrouche, S.; Plestan, F.; Glumineau, A.; Boisliveau, R. Robust second order sliding mode control for a permanent magnet synchronous motor. In Proceedings of the American Control Conference, Denver, CO, USA, 4–6 June 2003; pp. 4071–4076. [Google Scholar]
- Kommuri, S.K.; Rath, J.J.; Veluvolu, K.C.; Defoort, M.; Soh, Y.C. Decoupled current control and sensor fault detection with second-order sliding mode for induction motor. IET Control Theory Appl. 2015, 9, 608–617. [Google Scholar] [CrossRef]
- Susperregui, A.; Martinez, M.I.; Tapia, G.; Vechiu, I. Second-order sliding-mode controller design and tuning for grid synchronisation and power control of a wind turbine-driven doubly fed induction generator. IET Renew. Power Gener. 2013, 7, 540–551. [Google Scholar] [CrossRef]
- Beltran, B.; Benbouzid, M.E.H.; Ahmed-Ali, T. Second-Order Sliding Mode Control of a Doubly Fed Induction Generator Driven Wind Turbine. IEEE Trans. Energy Convers. 2012, 27, 261–269. [Google Scholar] [CrossRef] [Green Version]
- Bitao, Z.; Youguo, P. Velocity Control of Permanent Magnet Synchronous Motor Based on Second-Order Sliding-Mode Technology. In Proceedings of the International Conference on Digital Manufacturing & Automation (ICDMA), Changsha, China, 18–20 December 2010; pp. 893–897. [Google Scholar]
- Qi, L.; Shi, H. A Novel Second Order Sliding Mode Control Algorithm for Velocity Control Permanent Magnet Synchronous Motor. In Intelligent Computing for Sustainable Energy and Environment: Second International Conference; Li, K., Li, S., Li, D., Niu, Q., Eds.; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Bartolini, G.; Ferrara, A.; Usani, E. Chattering avoidance by second-order sliding mode control. IEEE Trans. Autom. Control 1998, 43, 241–246. [Google Scholar] [CrossRef]
- Boiko, I.; Fridman, L.; Pisano, A.; Usai, E. Analysis of Chattering in Systems With Second-Order Sliding Modes. IEEE Trans. Autom. Control 2007, 52, 2085–2102. [Google Scholar] [CrossRef]
- Gao, W.; Hung, J.C. Variable structure control of nonlinear systems: A new approach. IEEE Trans. Ind. Electron. 1993, 40, 45–55. [Google Scholar] [CrossRef]
- Zhang, X.; Zhao, K.; Sun, L. A PMSM sliding mode control system based on a novel reaching law. In Proceedings of the International Conference on Electrical Machines and Systems (ICEMS), Beijing, China, 20–23 August 2011; pp. 1–5. [Google Scholar]
- Jamoussi, K.; Ouali, M.; Chrifi-Alaoui, L.; Benderradji, H.; Hajjaji, A.E. Robust Sliding Mode Control Using Adaptive Switching Gain for Induction Motors. Int. J. Autom. Comput. 2013, 10, 303–311. [Google Scholar] [CrossRef] [Green Version]
- Faa-Jeng, L.; Sheng-Lyin, C.; Kuo-Kai, S. Novel sliding mode controller for synchronous motor drive. IEEE Trans. Aerosp. Electron. Syst. 1998, 34, 532–542. [Google Scholar] [CrossRef]
- In-Cheol, B.; Kyeong-Hwa, K.; Myung-Joong, Y. Robust nonlinear speed control of PM synchronous motor using boundary layer integral sliding mode control technique. IEEE Trans. Control Syst. Technol. 2000, 8, 47–54. [Google Scholar] [CrossRef]
- Chen, W.H.; Yang, J.; Guo, L.; Li, S. Disturbance-Observer-Based Control and Related Methods—An Overview. IEEE Trans. Ind. Electron. 2016, 63, 1083–1095. [Google Scholar] [CrossRef] [Green Version]
- Chiang, H.K.; Tseng, C.H. Integral variable structure controller with grey prediction for synchronous reluctance motor drive. IEE Proc.—Electr. Power Appl. 2004, 151, 349–358. [Google Scholar] [CrossRef]
- SangJoo, K.; Wan Kyun, C. A discrete-time design and analysis of perturbation observer for motion control applications. IEEE Trans. Control Syst. Technol. 2003, 11, 399–407. [Google Scholar] [CrossRef]
- She, J.H.; Fang, M.; Ohyama, Y.; Hashimoto, H.; Wu, M. Improving Disturbance-Rejection Performance Based on an Equivalent-Input-Disturbance Approach. IEEE Trans. Ind. Electron. 2008, 55, 380–389. [Google Scholar] [CrossRef]
- Jingqing, H. The Extended State Observer of a Class of Uncertain Systems. Control Decis. 1995, 1. Available online: http://en.cnki.com.cn/Article_en/CJFDTOTAL-KZYC501.019 (accessed on 20 January 2019).
- Wang, J.; Li, S.; Yang, J.; Wu, B.; Li, Q. Extended state observer-based sliding mode control for PWM-based DC-DC buck power converter systems with mismatched disturbances. IET Control Theory Appl. 2015, 9, 579–586. [Google Scholar] [CrossRef]
- Ohnishi, K. A new servo method in mechatronics. Trans. Jpn. Soc. Electr. Eng. 1987, 107, 83–86. [Google Scholar]
- Zhang, J.; Liu, X.; Xia, Y.; Zuo, Z.; Wang, Y. Disturbance Observer-Based Integral Sliding-Mode Control for Systems With Mismatched Disturbances. IEEE Trans. Ind. Electron. 2016, 63, 7040–7048. [Google Scholar] [CrossRef]
- Cao, Y.; Chen, X.B. Disturbance-Observer-Based Sliding-Mode Control for a 3-DOF Nanopositioning Stage. IEEE/ASME Trans. Mechatron. 2014, 19, 924–931. [Google Scholar] [CrossRef]
- Mu, C.; Zong, Q.; Tian, B.; Xu, W. Continuous sliding mode controller with disturbance observer for hypersonic vehicles. IEEE/CAA J. Autom. Sin. 2015, 2, 45–55. [Google Scholar] [CrossRef]
- Kaynak, O.; Erbatur, K.; Ertugnrl, M. The fusion of computationally intelligent methodologies and sliding-mode control-a survey. IEEE Trans. Ind. Electron. 2001, 48, 4–17. [Google Scholar] [CrossRef] [Green Version]
- Chen, Z.; Shan, C.; Zhu, H. Adaptive Fuzzy Sliding Mode Control Algorithm for a Non-Affine Nonlinear System. IEEE Trans. Ind. Inform. 2007, 3, 302–311. [Google Scholar] [CrossRef]
- Zadeh, L.A. Fuzzy sets. Inf. Control 1965, 8, 338–353. [Google Scholar] [CrossRef] [Green Version]
- Mohanty, A.; Patra, S.; Ray, P.K. Robust fuzzy-sliding mode based UPFC controller for transient stability analysis in autonomous wind-diesel-PV hybrid system. IET Gener. Transm. Distrib. 2016, 10, 1248–1257. [Google Scholar] [CrossRef]
- Zhang, X.; Wang, Y.; Liu, G.; Yuan, X. Robust Regenerative Charging Control Based on T-S Fuzzy Sliding-Mode Approach for Advanced Electric Vehicle. IEEE Trans. Transp. Electrif. 2016, 2, 52–65. [Google Scholar] [CrossRef]
- Dasmahapatra, S.; Sarkar, B.K.; Saha, R.; Chatterjee, A.; Mookherjee, S.; Sanyal, D. Design of an Adaptive Fuzzy-Bias SMC and Validation for a Rugged Electrohydraulic System. IEEE/ASME Trans. Mechatron. 2015, 20, 2708–2715. [Google Scholar] [CrossRef]
- Yin, X.X.; Lin, Y.G.; Li, W.; Liu, H.W.; Gu, Y.J. Fuzzy-Logic Sliding-Mode Control Strategy for Extracting Maximum Wind Power. IEEE Trans. Energy Convers. 2015, 30, 1267–1278. [Google Scholar] [CrossRef]
- Saghafinia, A.; Wooi Ping, H.; Nasir Uddin, M. Fuzzy sliding mode control based on boundary layer theory for chattering-free and robust induction motor drive. Int. J. Adv. Manuf. Technol. 2014, 71, 57–68. [Google Scholar] [CrossRef]
- Elsayed, B.A.; Hassan, M.A.; Mekhilef, S. Fuzzy swinging-up with sliding mode control for third order cart-inverted pendulum system. Int. J. Control Autom. 2015, 13, 238–248. [Google Scholar] [CrossRef]
- Elsayed, B.A.; Hassan, M.; Mekhilef, S. Decoupled third-order fuzzy sliding model control for cart-inverted pendulum system. Appl. Math. 2013, 7, 193–201. [Google Scholar] [CrossRef]
- Lee, C.C. Fuzzy logic in control systems: Fuzzy logic controller. I. IEEE Trans. Syst. ManCybern. 1990, 20, 404–418. [Google Scholar] [CrossRef]
- Guo, Y.; Long, H. Self organizing fuzzy sliding mode controller for the position control of a permanent magnet synchronous motor drive. AIN Shams Eng. J. 2011, 2, 109–118. [Google Scholar] [CrossRef] [Green Version]
- Kuo, C.-F.; Hsu, C.-H.; Tsai, C.-C. Control of a permanent magnet synchronous motor with a fuzzy sliding-mode controller. Int. J. Adv. Manuf. Technol. 2007, 32, 757–763. [Google Scholar] [CrossRef]
- Brock, S.; Deskur, J.; Zawirski, K. Robust speed and position control of PMSM. In Proceedings of Proceedings of the IEEE International Symposium on Industrial Electronics (Cat. No.99TH8465) (ISIE), Bled, Slovenia, 12–16 July 1999; pp. 667–672. [Google Scholar]
- Saghafinia, A.; Ping, H.W.; Uddin, M.N.; Gaeid, K.S. Adaptive Fuzzy Sliding-Mode Control Into Chattering-Free IM Drive. IEEE Trans. Ind. Appl. 2015, 51, 692–701. [Google Scholar] [CrossRef]
- Faa-Jeng, L.; Po-Hung, S. Robust Fuzzy Neural Network Sliding-Mode Control for Two-Axis Motion Control System. IEEE Trans. Ind. Electron. 2006, 53, 1209–1225. [Google Scholar] [CrossRef]
- Liangyong, W.; Tianyou, C.; Lianfei, Z. Neural-Network-Based Terminal Sliding-Mode Control of Robotic Manipulators Including Actuator Dynamics. IEEE Trans. Ind. Electron. 2009, 56, 3296–3304. [Google Scholar] [CrossRef]
- Rossomando, F.G.; Soria, C.M. Adaptive Neural Sliding Mode Control in Discrete Time for a SCARA robot arm. IEEE Lat. Am. Trans. 2016, 14, 2556–2564. [Google Scholar] [CrossRef]
- Wiest, J.H.; Buckner, G.D. Indirect Intelligent Sliding Mode Control of Antagonistic Shape Memory Alloy Actuators Using Hysteretic Recurrent Neural Networks. IEEE Trans. Control Syst. Technol. 2014, 22, 921–929. [Google Scholar] [CrossRef]
- Castaneda, C.E.; Loukianov, A.G.; Sanchez, E.N.; Castillo-Toledo, B. Discrete-Time Neural Sliding-Mode Block Control for a DC Motor With Controlled Flux. IEEE Trans. Ind. Electron. 2012, 59, 1194–1207. [Google Scholar] [CrossRef]
- Lin, F.J.; Hung, Y.C.; Chen, S.Y. Field-programmable gate array-based intelligent dynamic sliding-mode control using recurrent wavelet neural network for linear ultrasonic motor. IET Control Theory Appl. 2010, 4, 1511–1532. [Google Scholar] [CrossRef]
- Pan, H.; Xia, L.Z. Efficient Object Recognition Using Boundary Representation and Wavelet Neural Network. IEEE Trans. Neural Netw. 2008, 19, 2132–2149. [Google Scholar] [CrossRef]
- Wai, R.J.; Muthusamy, R. Fuzzy-Neural-Network Inherited Sliding-Mode Control for Robot Manipulator Including Actuator Dynamics. IEEE Trans. Neural Netw. Learn. Syst. 2013, 24, 274–287. [Google Scholar] [CrossRef]
- Wai, R.J. Total sliding-mode controller for PM synchronous servo motor drive using recurrent fuzzy neural network. IEEE Trans. Ind. Electron. 2001, 48, 926–944. [Google Scholar]
- Sheng, L.; Xiaojie, G.; Lanyong, Z. Robust Adaptive Backstepping Sliding Mode Control for Six-Phase Permanent Magnet Synchronous Motor Using Recurrent Wavelet Fuzzy Neural Network. IEEE Access 2017, 5, 14502–14515. [Google Scholar] [CrossRef]
- Zaihidee, F.M.; Mekhilef, S.; Mubin, M. Fractional order SMC for speed control of PMSM. In Proceedings of the 6th International Electrical Engineering Congress (iEECON2018), Krabi, Thailand, 7–9 March 2018. [Google Scholar]
- Plestan, F.; Shtessel, Y.; Brégeault, V.; Poznyak, A. New methodologies for adaptive sliding mode control. Int. J. Control 2010, 83, 1907–1919. [Google Scholar] [CrossRef] [Green Version]
- Chen, Q.; Tao, L.; Nan, Y.; Ren, X. Adaptive Nonlinear Sliding Mode Control of Mechanical Servo System With LuGre Friction Compensation. J. Dyn. Syst. Meas. Control 2015, 138, 021003–021009. [Google Scholar] [CrossRef]
- Roy, S.; Kar, I.N. Adaptive robust tracking control of a class of nonlinear systems with input delay. Nonlinear Dyn. 2016, 85, 1127–1139. [Google Scholar] [CrossRef] [Green Version]
- Roy, S.; Kar, I.N. Adaptive sliding mode control of a class of nonlinear systems with artificial delay. J. Frankl. Inst. 2017, 354, 8156–8179. [Google Scholar] [CrossRef]
- Roy, S.; Kar, I.N.; Lee, J.; Jin, M. Adaptive-Robust Time-Delay Control for a Class of Uncertain Euler–Lagrange Systems. IEEE Trans. Ind. Electron. 2017, 64, 7109–7119. [Google Scholar] [CrossRef]
- Roy, S.; Kar, I.N.; Lee, J.; Tsagarakis, N.G.; Caldwell, D.G. Adaptive-Robust Control of a Class of EL Systems With Parametric Variations Using Artificially Delayed Input and Position Feedback. IEEE Trans. Control Syst. Technol. 2018, 1–13. [Google Scholar] [CrossRef]
- Mobayen, S. An adaptive chattering-free PID sliding mode control based on dynamic sliding manifolds for a class of uncertain nonlinear systems. Nonlinear Dyn. 2015, 82, 53–60. [Google Scholar] [CrossRef]
Figure 1.
Comparison of energy transfer during sliding motion of FOSMC (blue line) and IOSMC (black line) [4].
Figure 1.
Comparison of energy transfer during sliding motion of FOSMC (blue line) and IOSMC (black line) [4].

Figure 2.
Sliding mode band of (a) conventional reaching law and (b) novel reaching law [11]. Reproduced with permission from Xiaoguang et al., Nonlinear speed control for PMSM system using sliding mode control and disturbance compensation techniques; published by IEEE Transactions on Power Electronics, 2013.
Figure 2.
Sliding mode band of (a) conventional reaching law and (b) novel reaching law [11]. Reproduced with permission from Xiaoguang et al., Nonlinear speed control for PMSM system using sliding mode control and disturbance compensation techniques; published by IEEE Transactions on Power Electronics, 2013.

Figure 3.
Typical block diagram of field oriented control of PMSM.

Figure 4.
Speed response of the proposed FOSMC and conventional SMC speed controller.

Figure 5.
Speed response of FOSMC-PID and FOSMC-PI speed controller.

Figure 6.
Speed response of FOSMC-PID and FOSMC-PD speed controller.

Figure 7.
Speed response of FOSMC-PID speed controller for various speed references.

Figure 8.
Speed response of FOSMC-PID speed controller for various load torque.

Figure 9.
Speed response of FOSMC-PID speed controller for motor sizes.

Figure 10.
Comparison of speed response of FOSMC and SMC speed controller when positive and negative loads are applied.
Figure 10.
Comparison of speed response of FOSMC and SMC speed controller when positive and negative loads are applied.

Figure 11.
Comparison of speed response of FOSMC and SMC speed controller when positive and negative reference speeds are given.
Figure 11.
Comparison of speed response of FOSMC and SMC speed controller when positive and negative reference speeds are given.

Figure 12.
Summary of SMC enhancement methods.


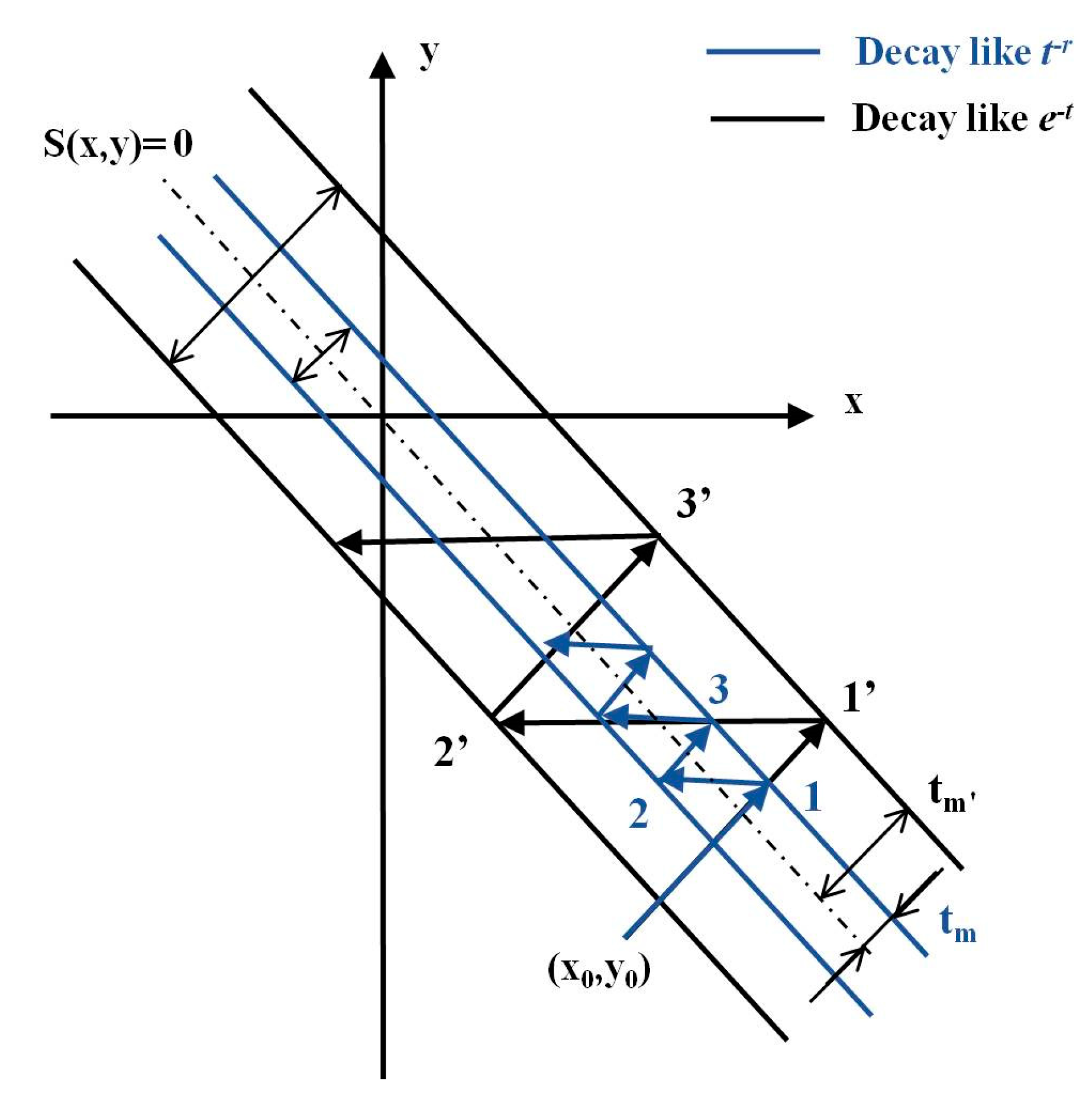{kind=link}
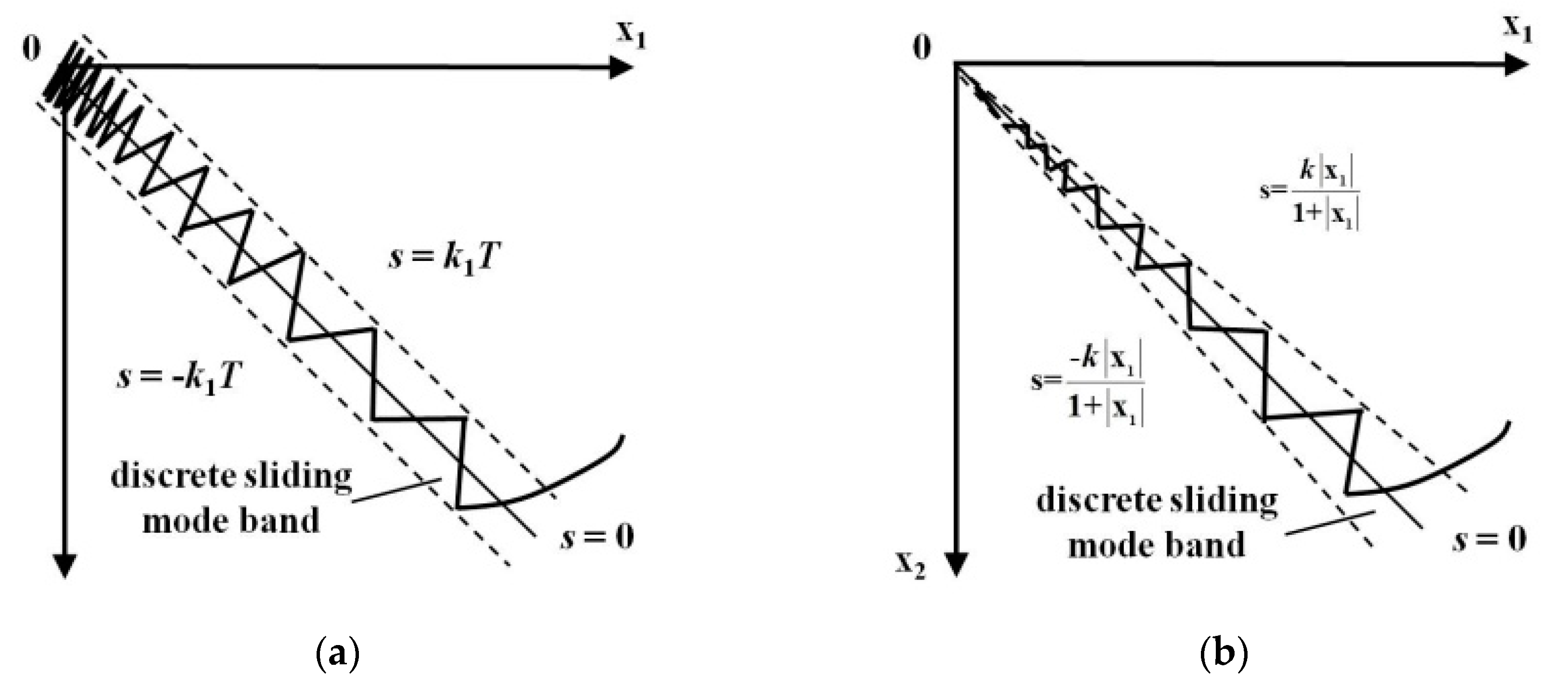{kind=link}
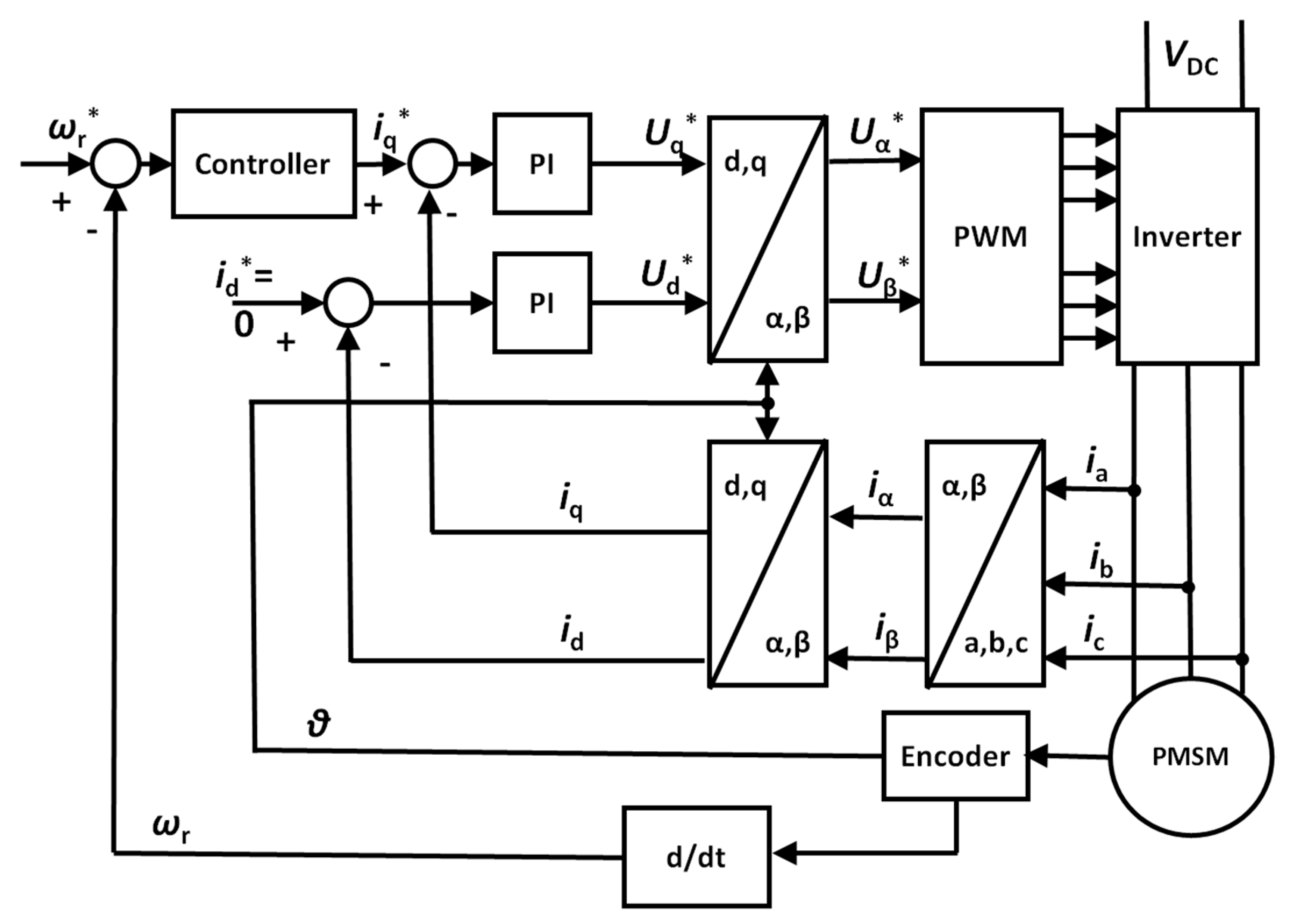{kind=link}
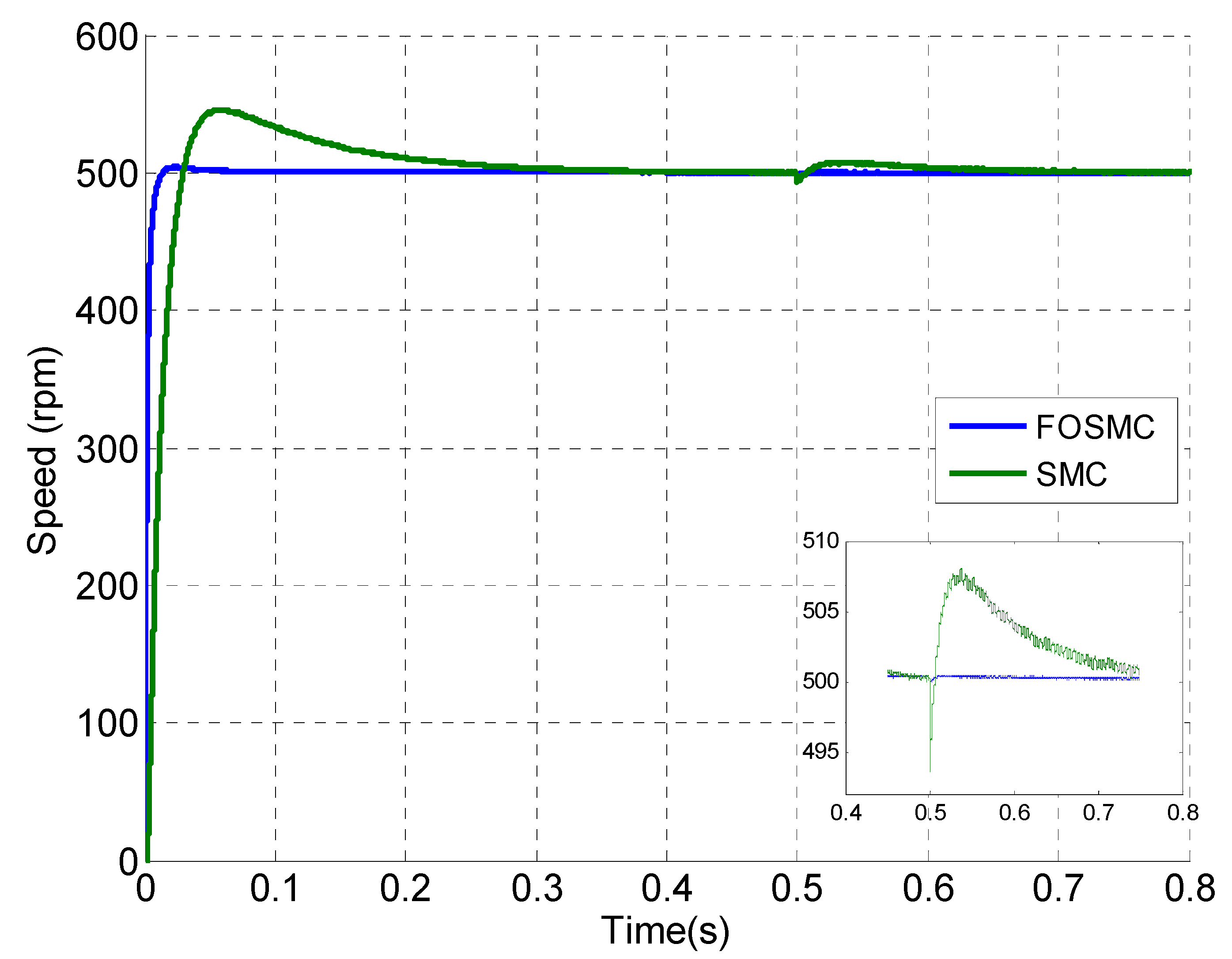{kind=link}
{kind=link}
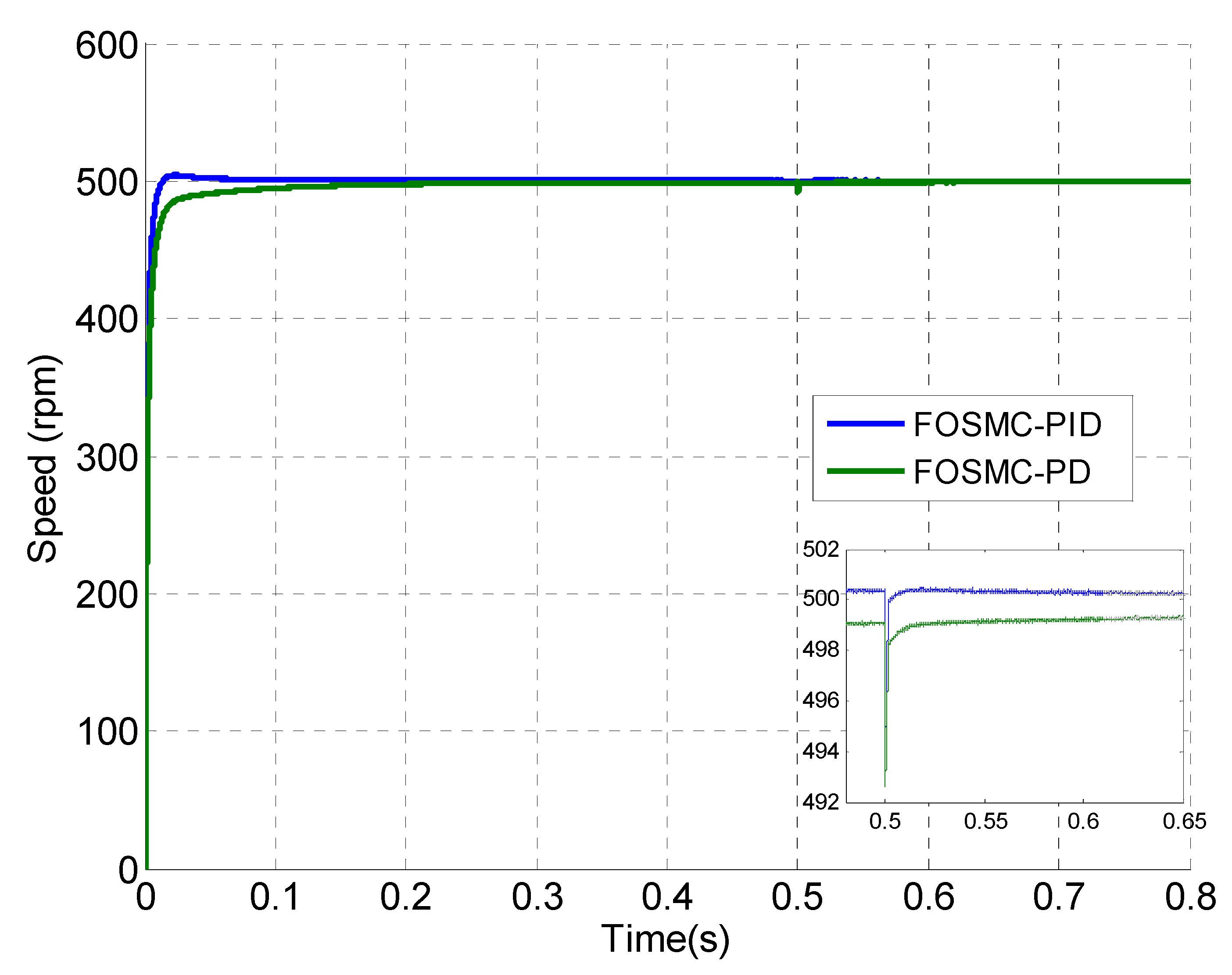{kind=link}
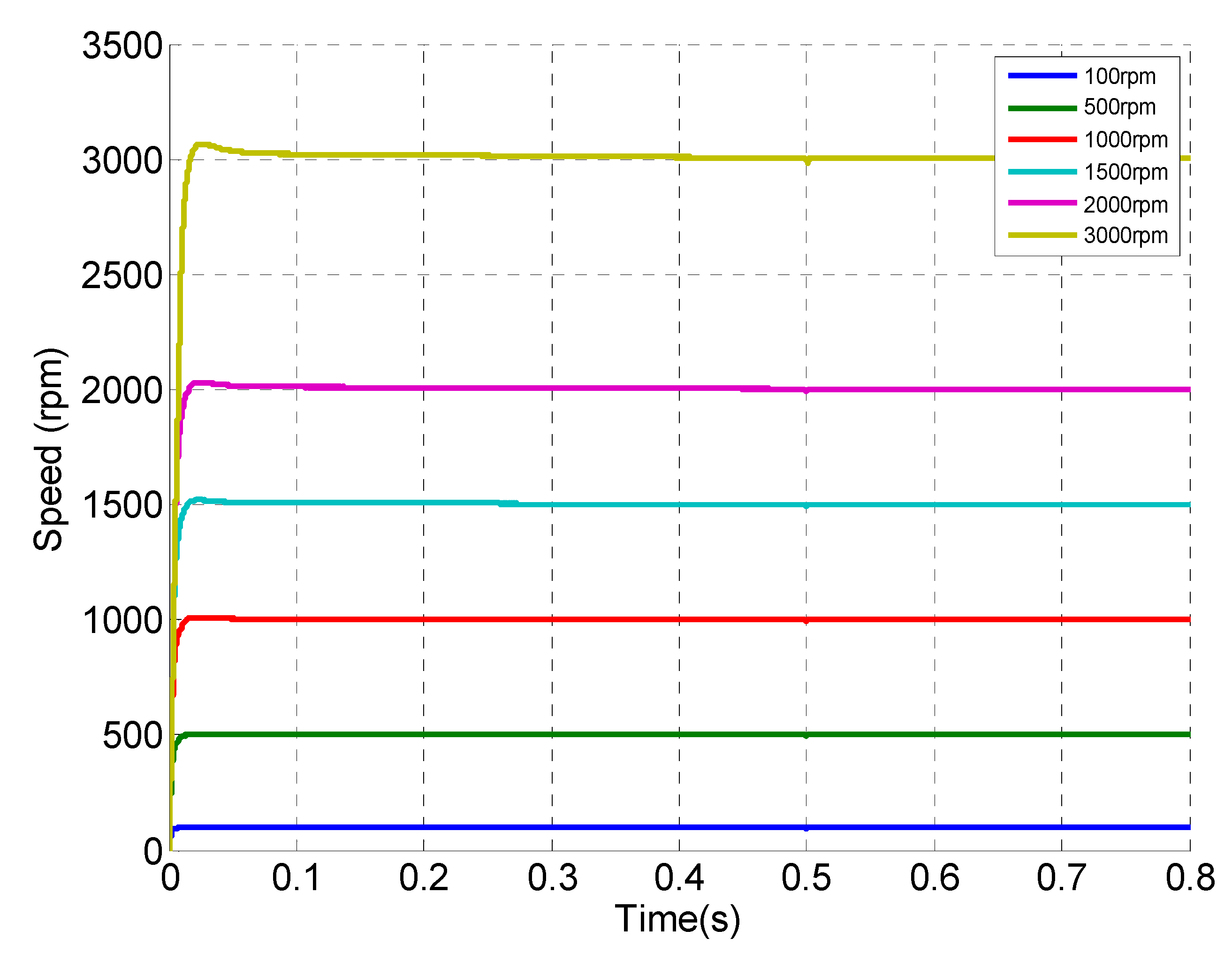{kind=link}
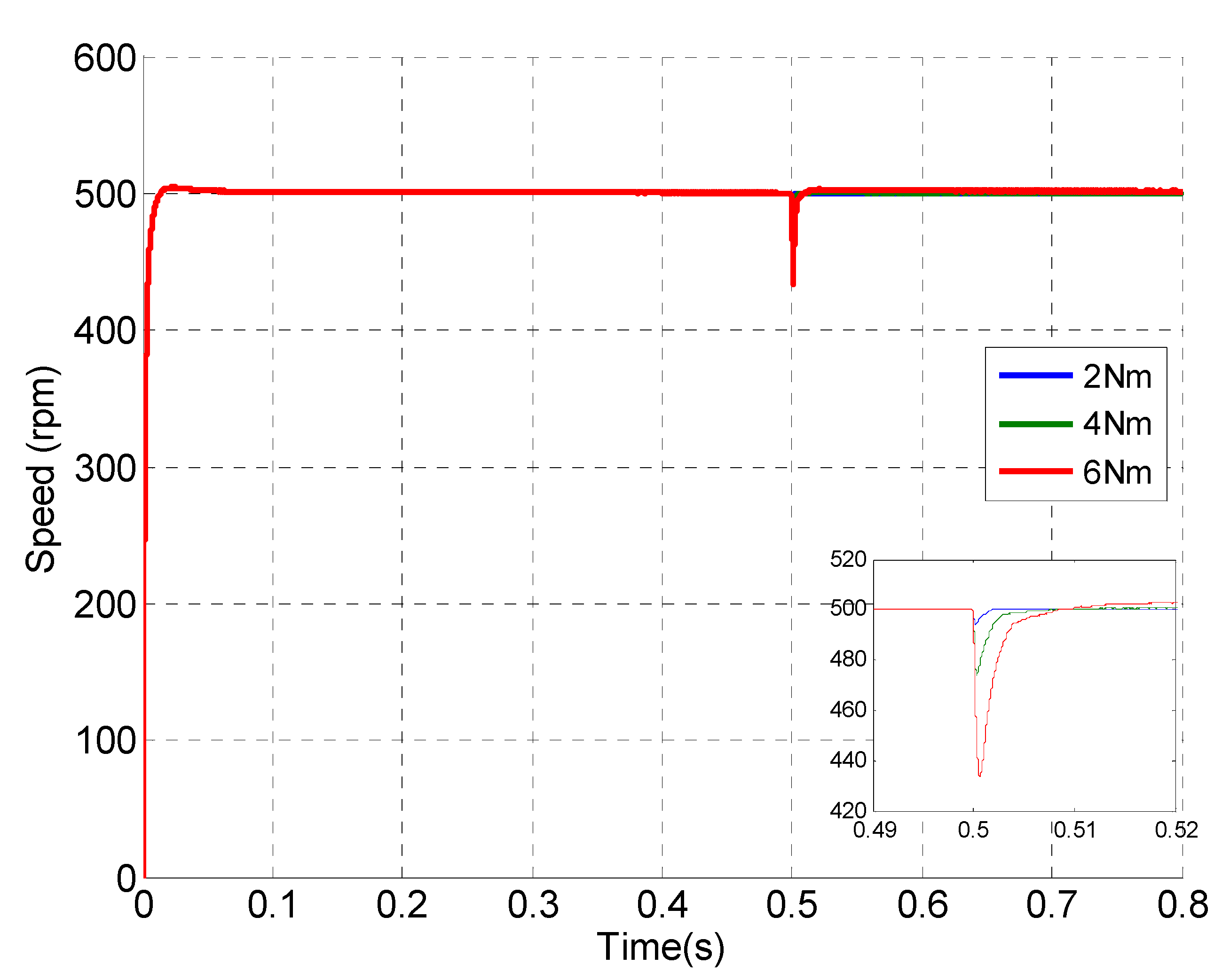{kind=link}
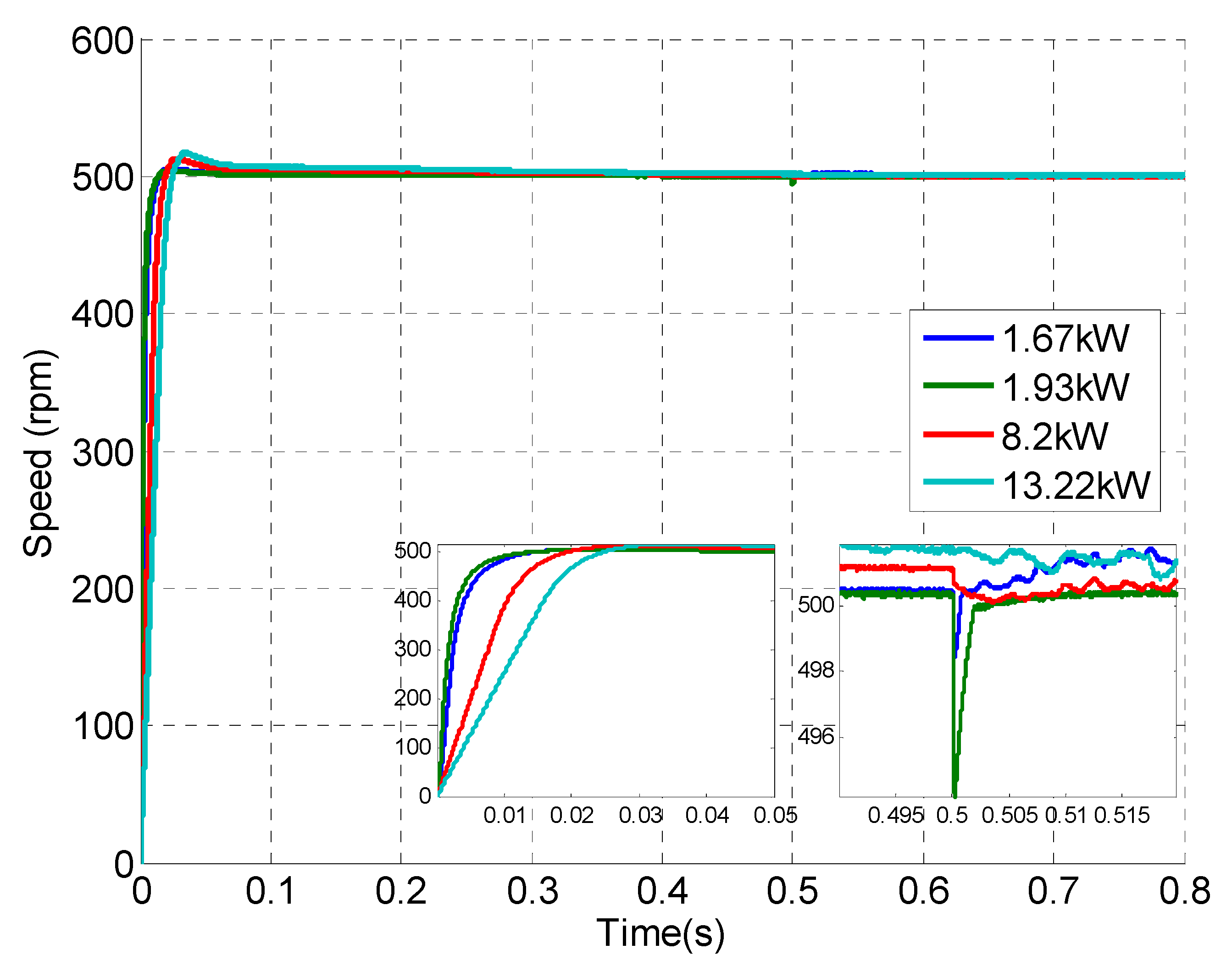{kind=link}
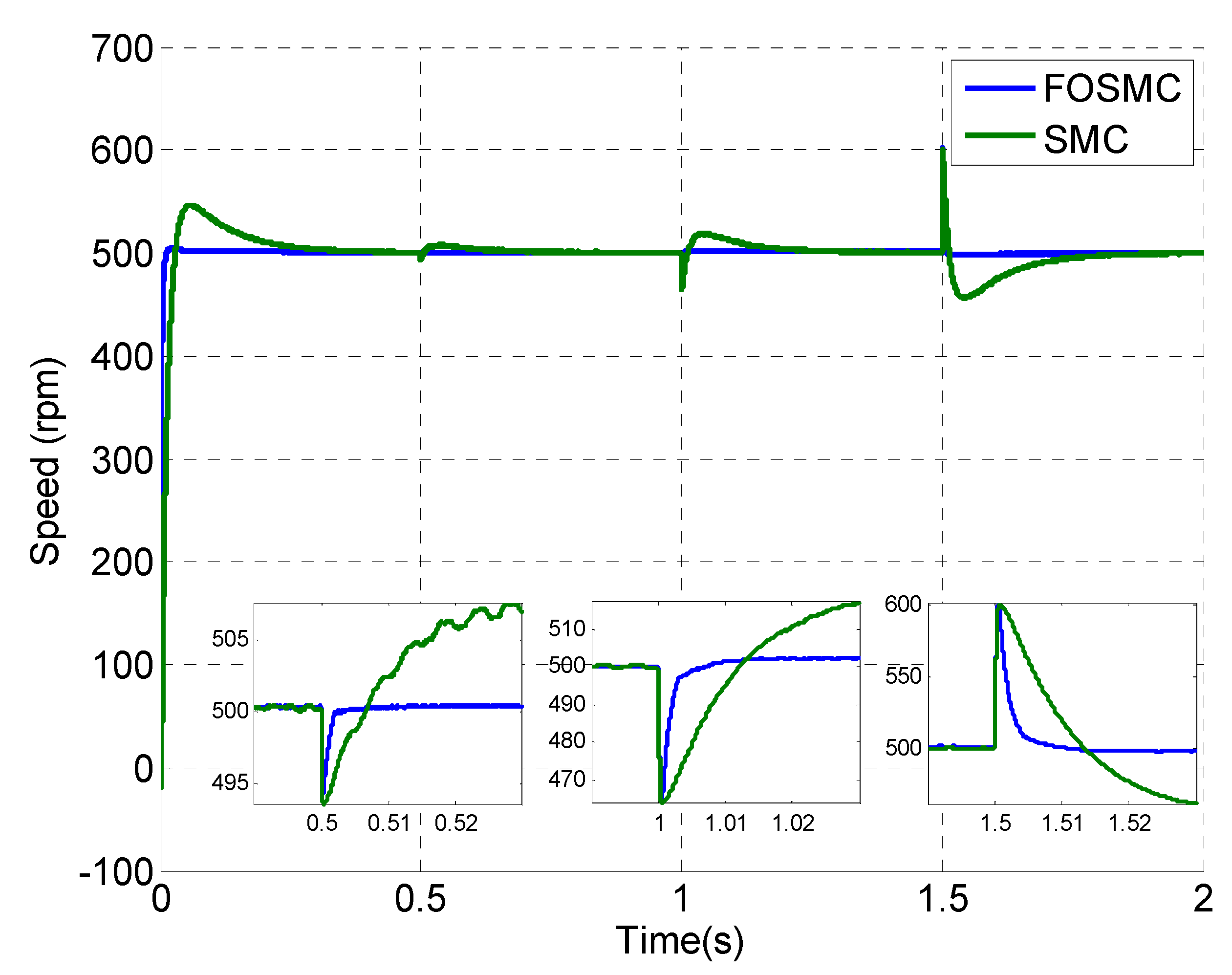{kind=link}
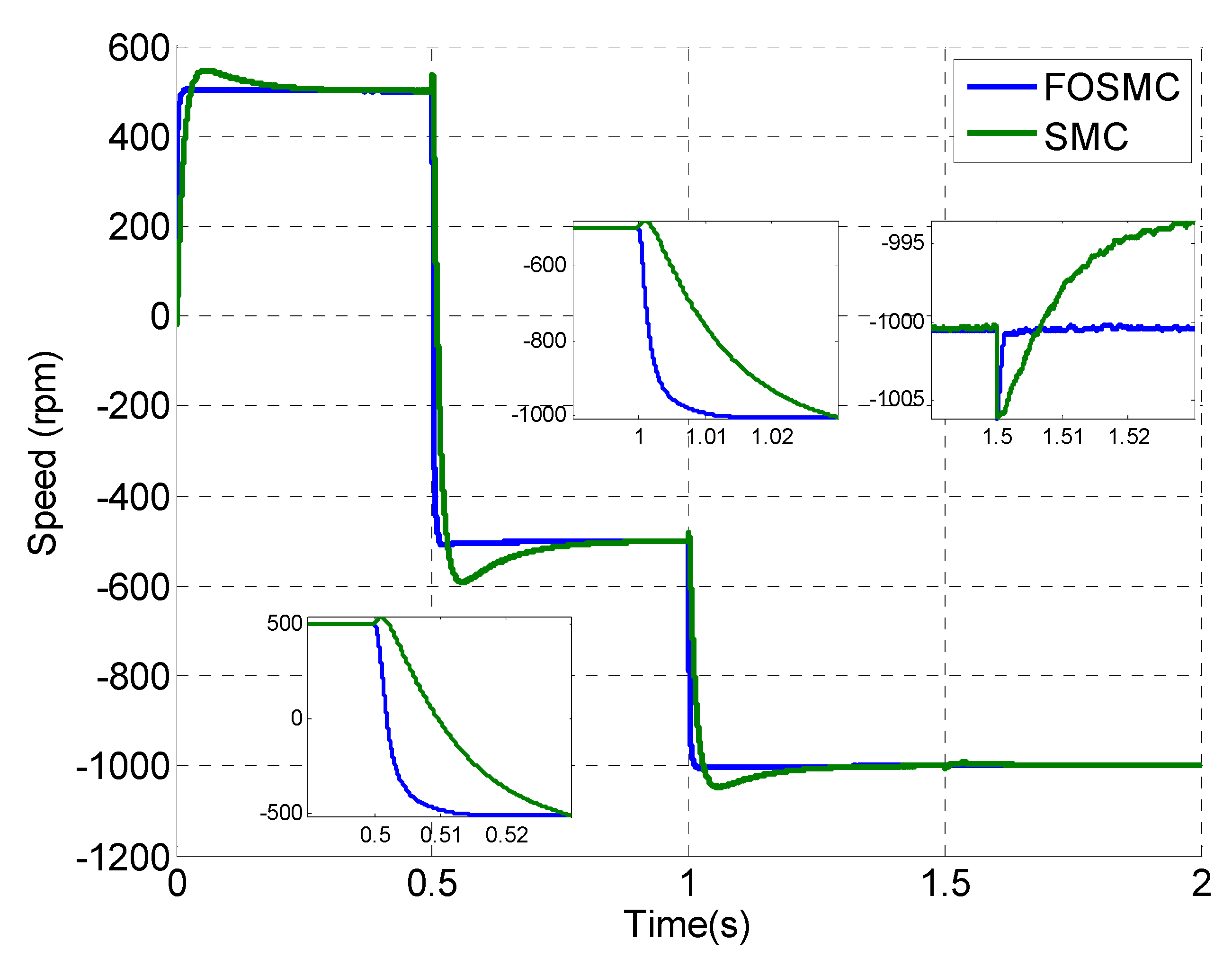{kind=link}
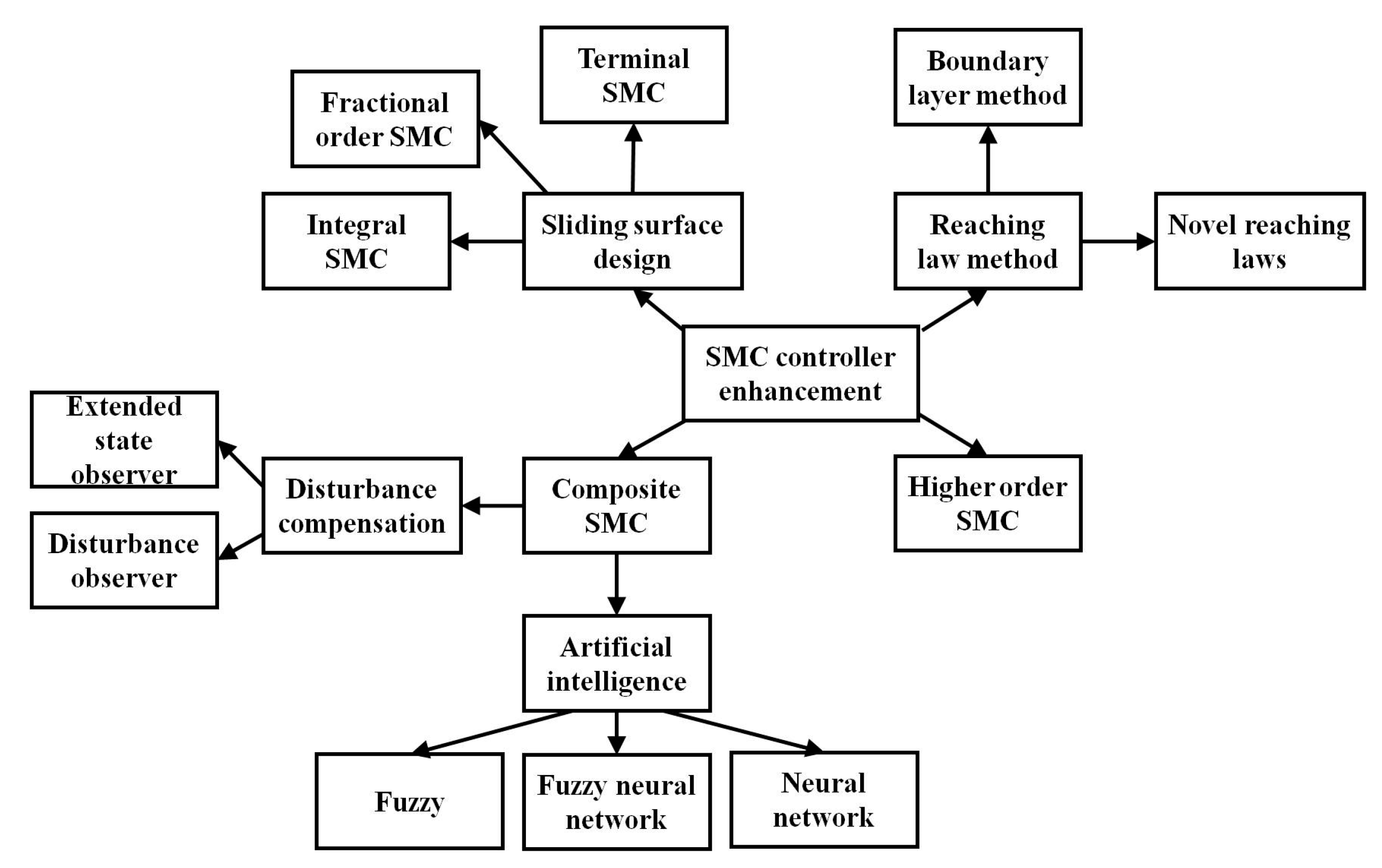{kind=link}
Table 1.
Parameters of PMSM.
| Parameter | Value |
|---|---|
| Stator resistance, | 1.2 Ω |
| d-axis stator inductance, | 6.35 m H |
| q-axis stator inductance, | 6.75 m H |
| Moment of inertia, | 2.31 × 10−4 kg m2 |
| Viscous friction coefficient, | 0.0002 Nm s |
| Flux linkage, | 0.15 Wb |
| Pole pair, | 4 |
Table 2.
Comparison of performance indices of the proposed controller with previous works.
| Performance Indices | SMC | FOSMC-PI | FOSMC-PD | FOSMC-PID (Proposed) |
|---|---|---|---|---|
| Overshoot (%) | 9.22 | 5.52 | 0 | 0.8593 |
| Settling time (s) | 0.288 | 0.0094 | 0.096 | 0.0096 |
| Speed drop (%) | 1.28 | 4.3 | 1.5 | 1.16 |
| Steady state error (%) | 0.02 | 0.04 | 0.06 | 0.02 |
| Torque ripple (%) | 12 | 11 | 10 | 10 |
| Speed ripple (%) | 0.16 | 0.12 | 0.014 | 0.014 |
Table 3.
Comparison of state-of-the-art implementation of SMC for speed control of PMSM.
| Controller Description | Remarkable Properties | Disadvantages |
|---|---|---|
| Linear SMC | Simplicity | Unsatisfactory convergence rate and settling time (can be improved by composite SMC or reaching law modification) |
| Integral SMC |
| Controller gain must be carefully tuned to ensure balance between robustness and chattering |
| Fractional order SMC |
| Careful tuning of fractional operator required |
| Terminal SMC | Fractional power is introduced to ensure fast and finite-time states convergence during sliding mode phase | Singularity problem that might occur if the initial conditions are not carefully selected (can be solved by NTSM, NFTSM) |
| Higher order SMC |
| Usage of differentiators, where their practical behavior requires particular care in real implementation due to measurement noise. |
| Boundary layer SMC | Smooth approximation to replace sign function to alleviate chattering |
|
| SMC with reaching law modification |
|
|
| SMC with feed-forward disturbance compensation |
| Depends on disturbance estimation accuracy |
| SMC with AI | Areas of AI utilization with SMC:
| Computational load |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Mohd Zaihidee, F.; Mekhilef, S.; Mubin, M. Robust Speed Control of PMSM Using Sliding Mode Control (SMC)—A Review. Energies 2019, 12, 1669. https://doi.org/10.3390/en12091669
AMA Style
Mohd Zaihidee F, Mekhilef S, Mubin M. Robust Speed Control of PMSM Using Sliding Mode Control (SMC)—A Review. Energies. 2019; 12(9):1669. https://doi.org/10.3390/en12091669
Chicago/Turabian StyleMohd Zaihidee, Fardila, Saad Mekhilef, and Marizan Mubin. 2019. "Robust Speed Control of PMSM Using Sliding Mode Control (SMC)—A Review" Energies 12, no. 9: 1669. https://doi.org/10.3390/en12091669
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.