
Evaluating Gyratory Compaction Characteristics of Unbound Permeable Aggregate Base Materials from Meso-Scale Particle Movement Measured by Smart Sensing Technology

 , ,
, ,
Abstract
:1. Introduction
2. Experimental Materials, Equipment, and Testing Program
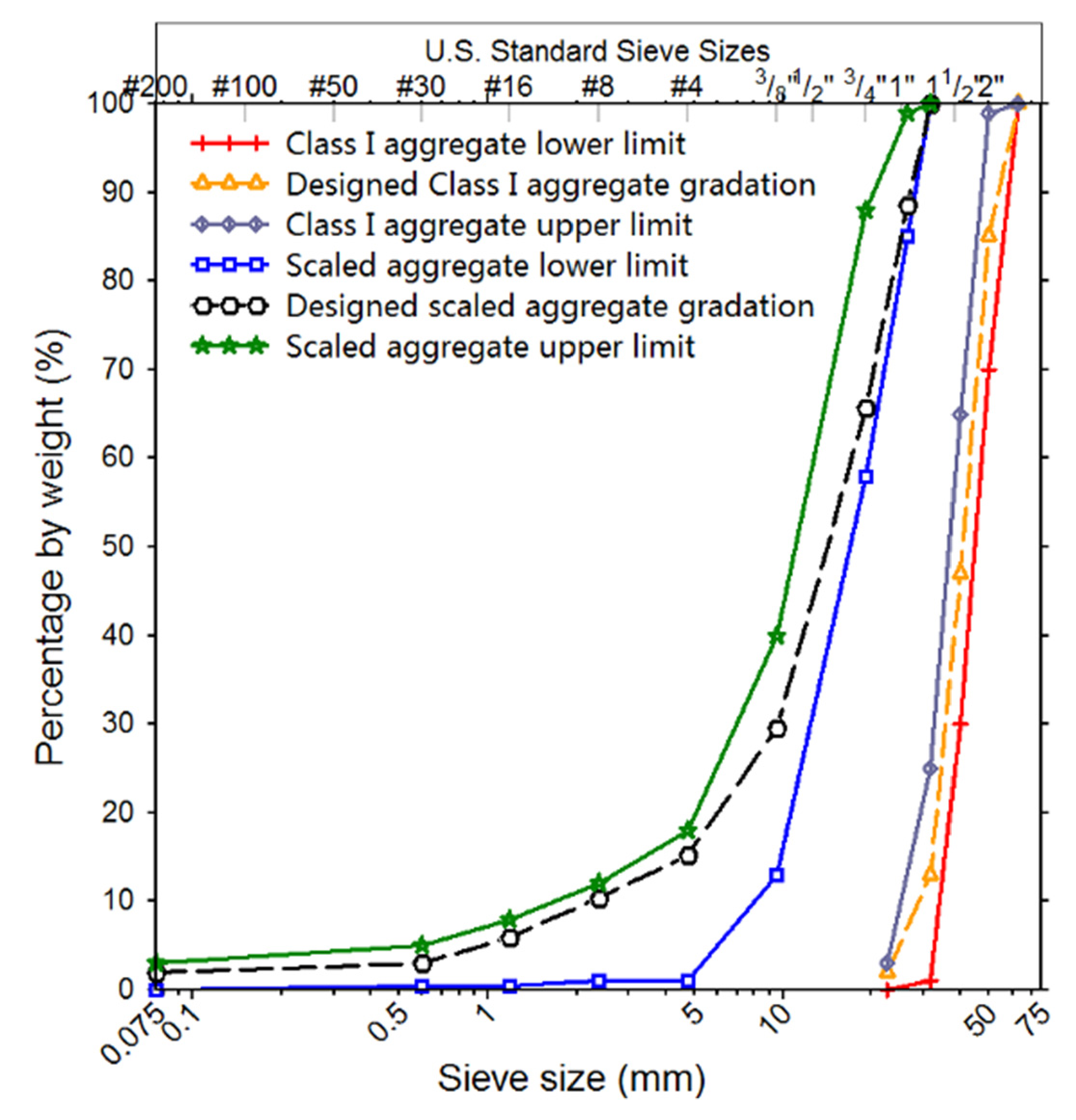
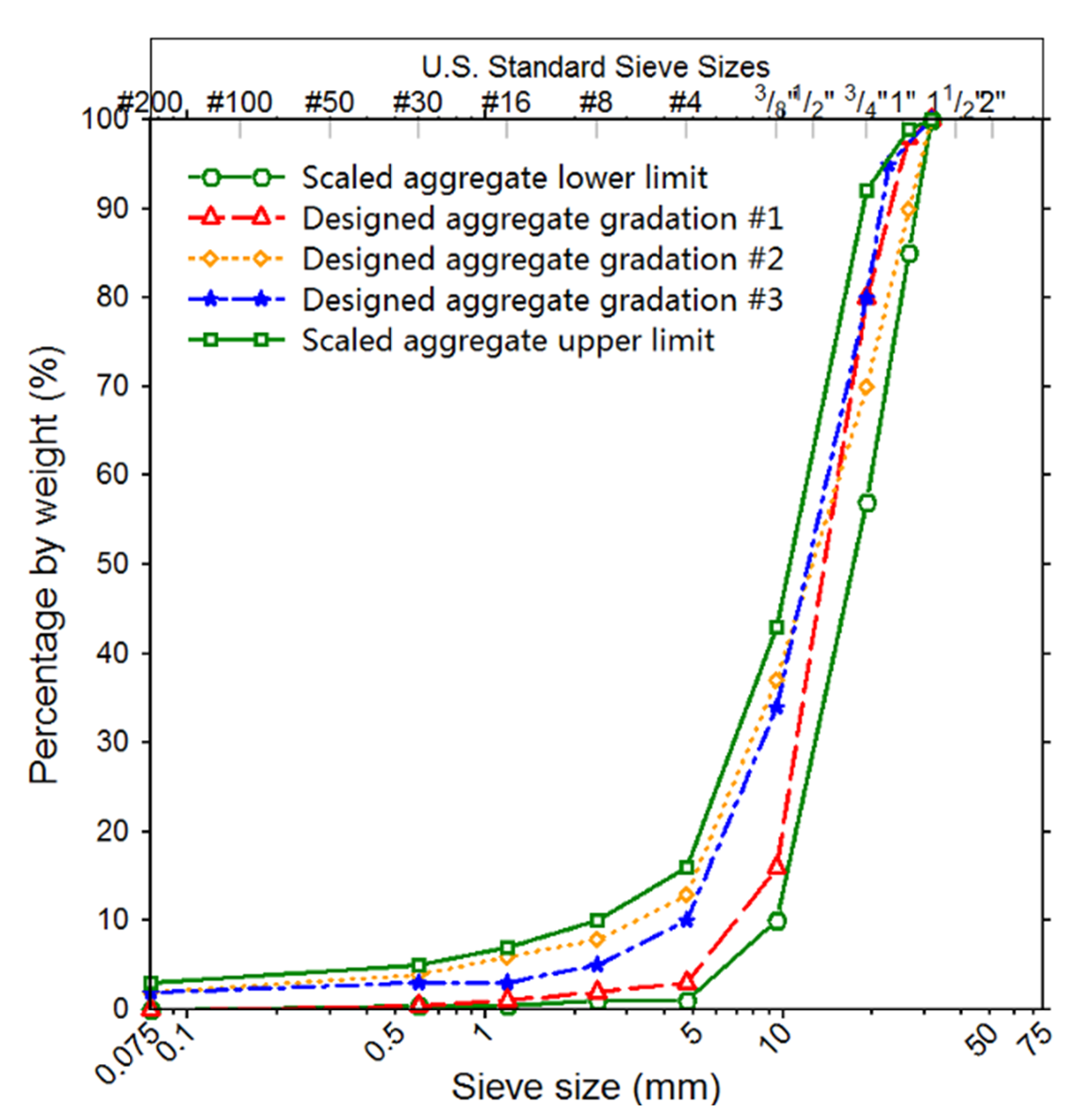
2.1. Materials
2.2. Orthogonal Array Test Design
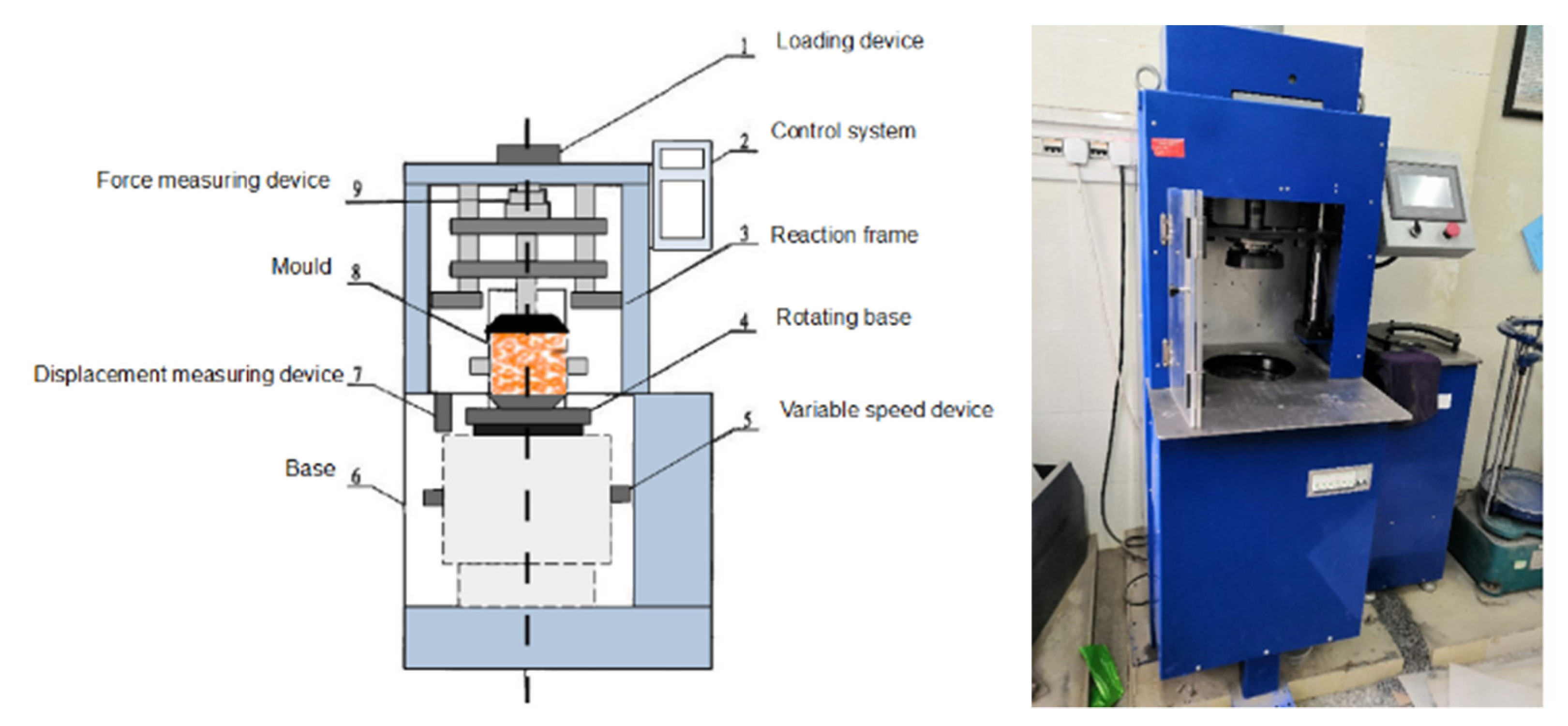
2.3. Gyratory Compaction
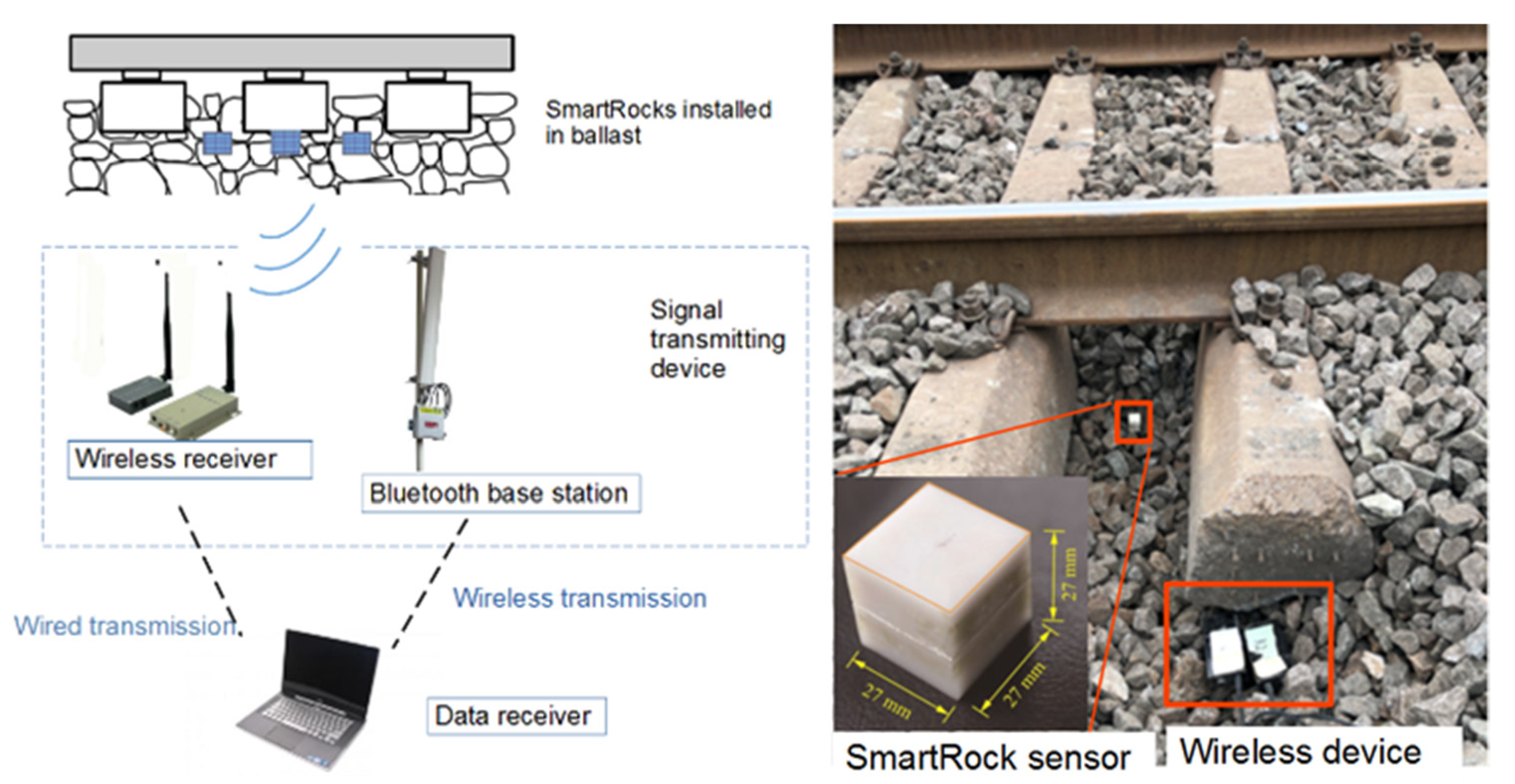
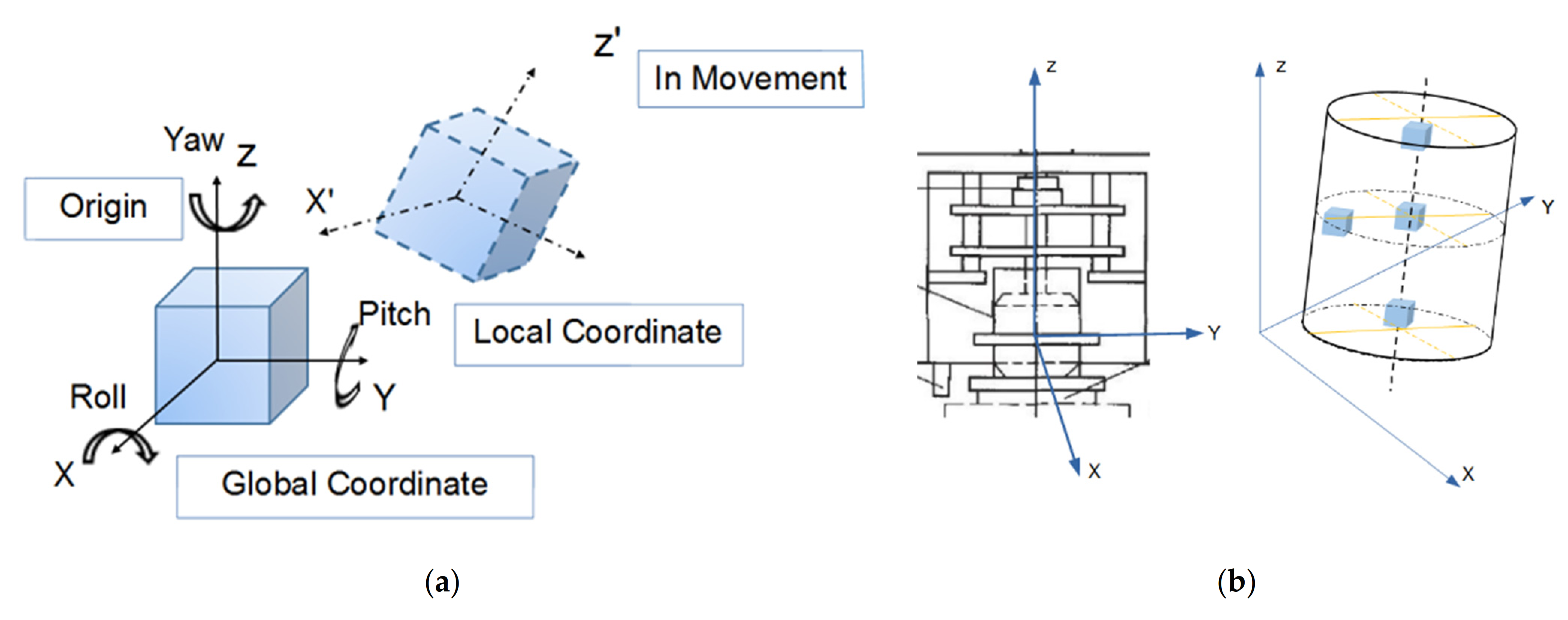
2.4. Smart Sensors for Monitoring Particle Movement
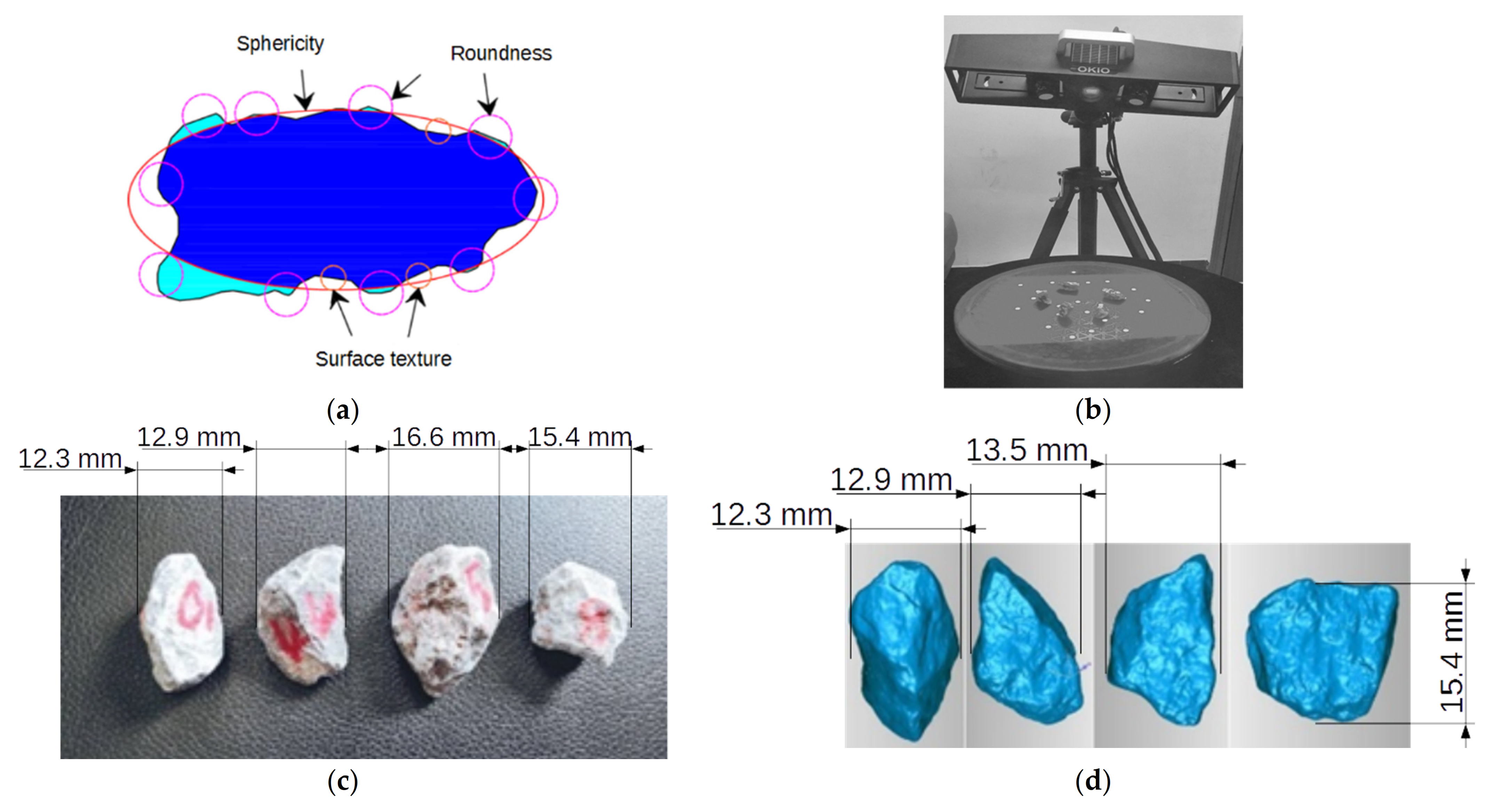
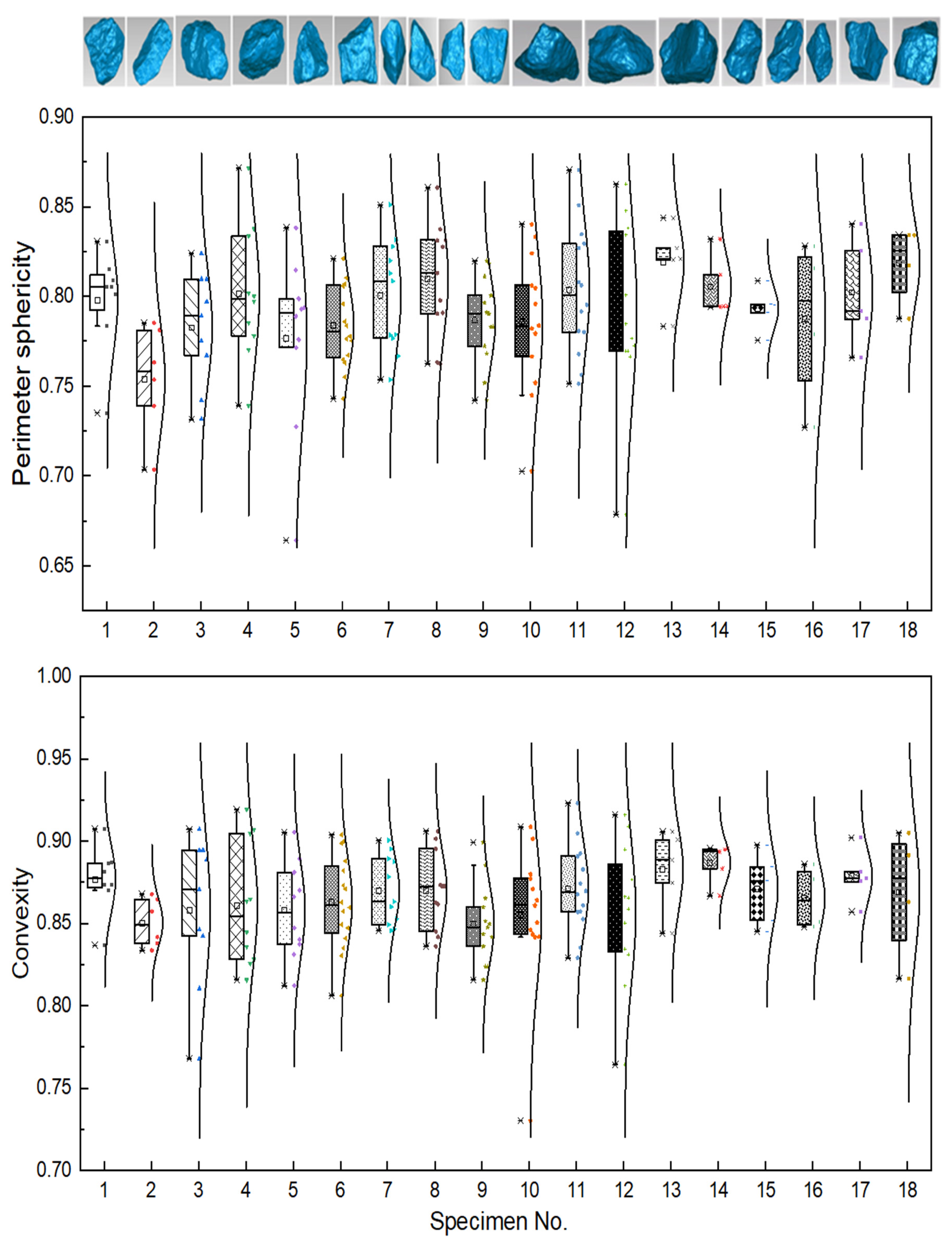
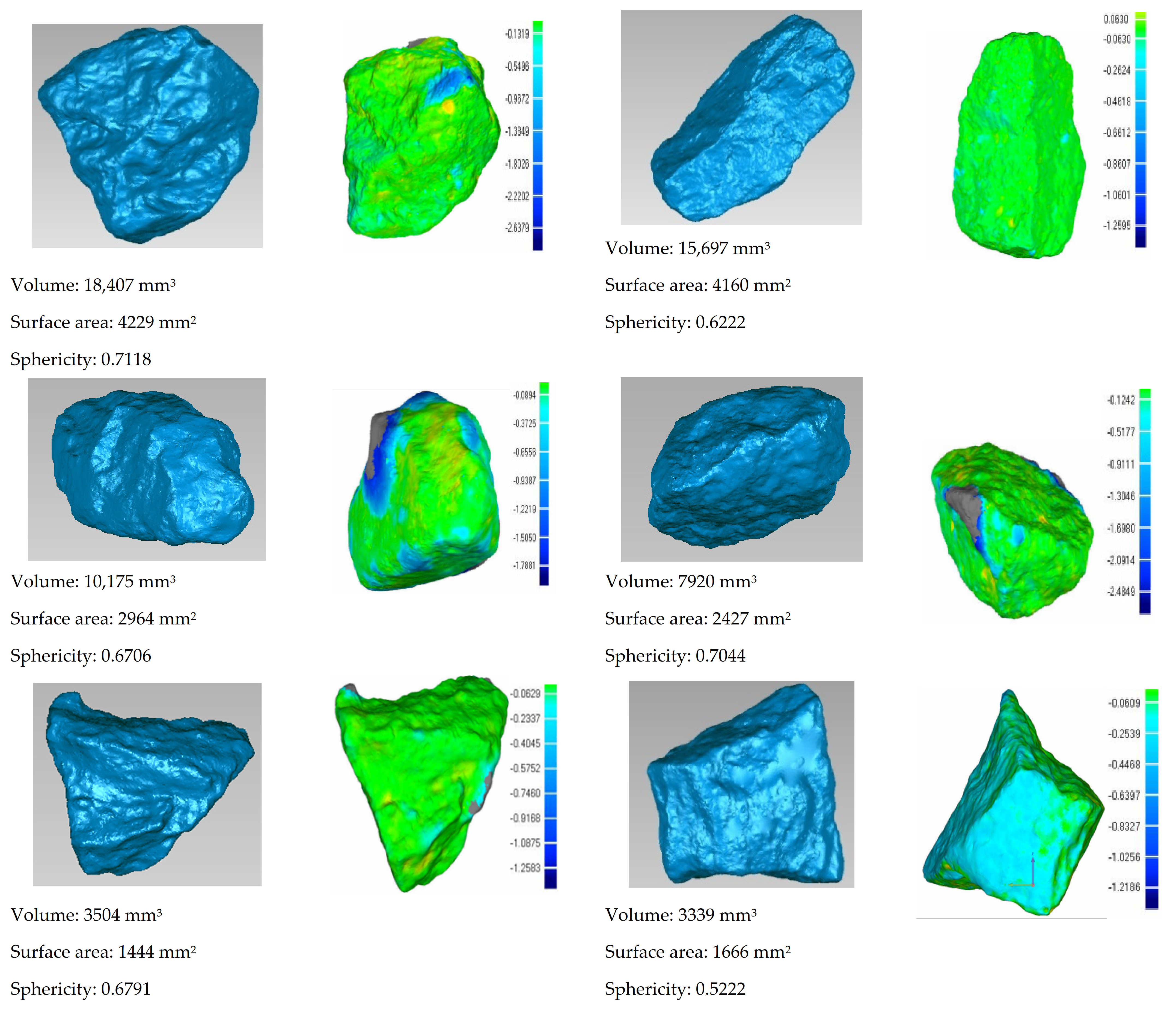
2.5. Particle Shape Quantification
3. Results and Analysis
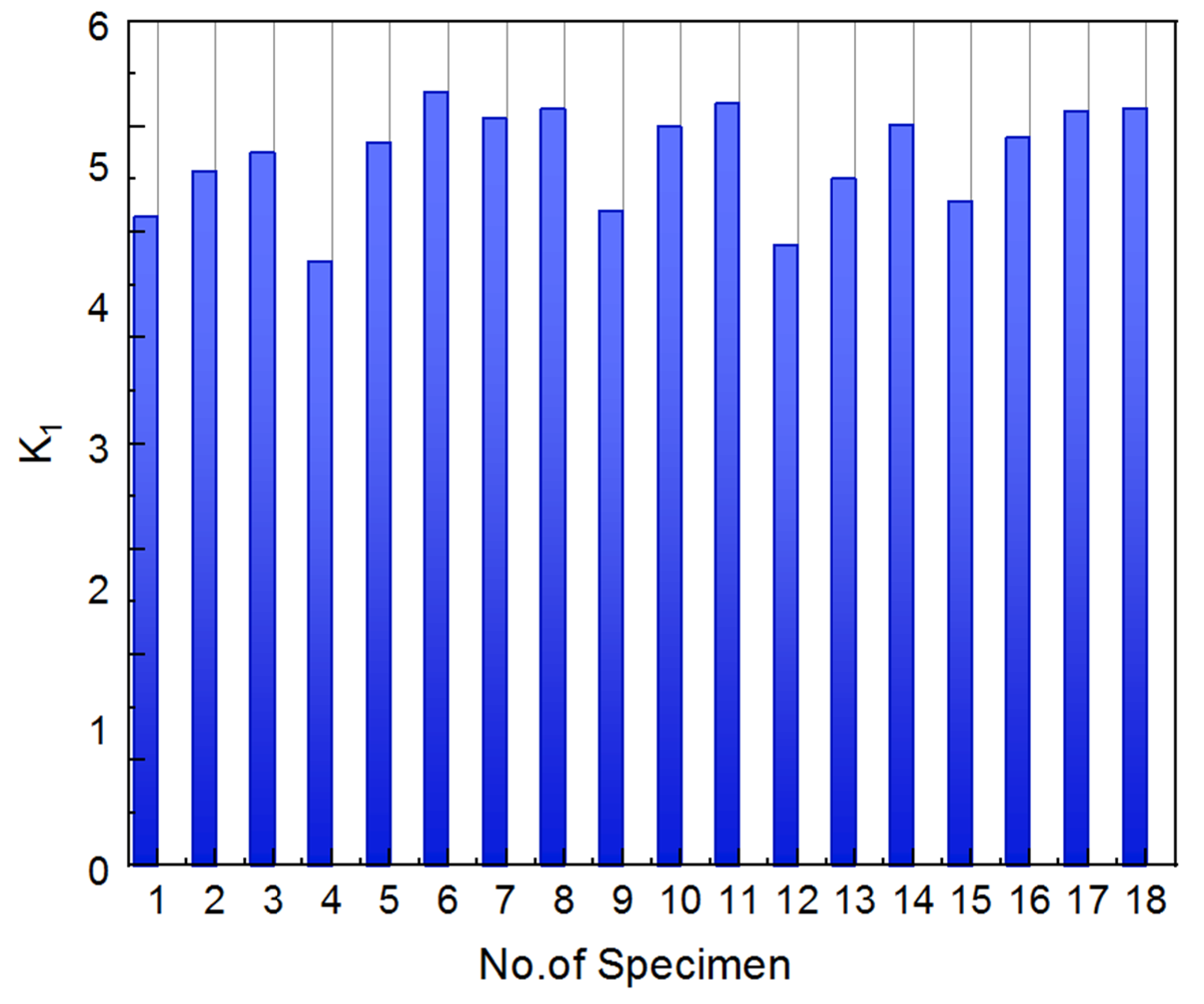
3.1. The Determination of the Optimal Combination of Gyratory Compaction Parameters
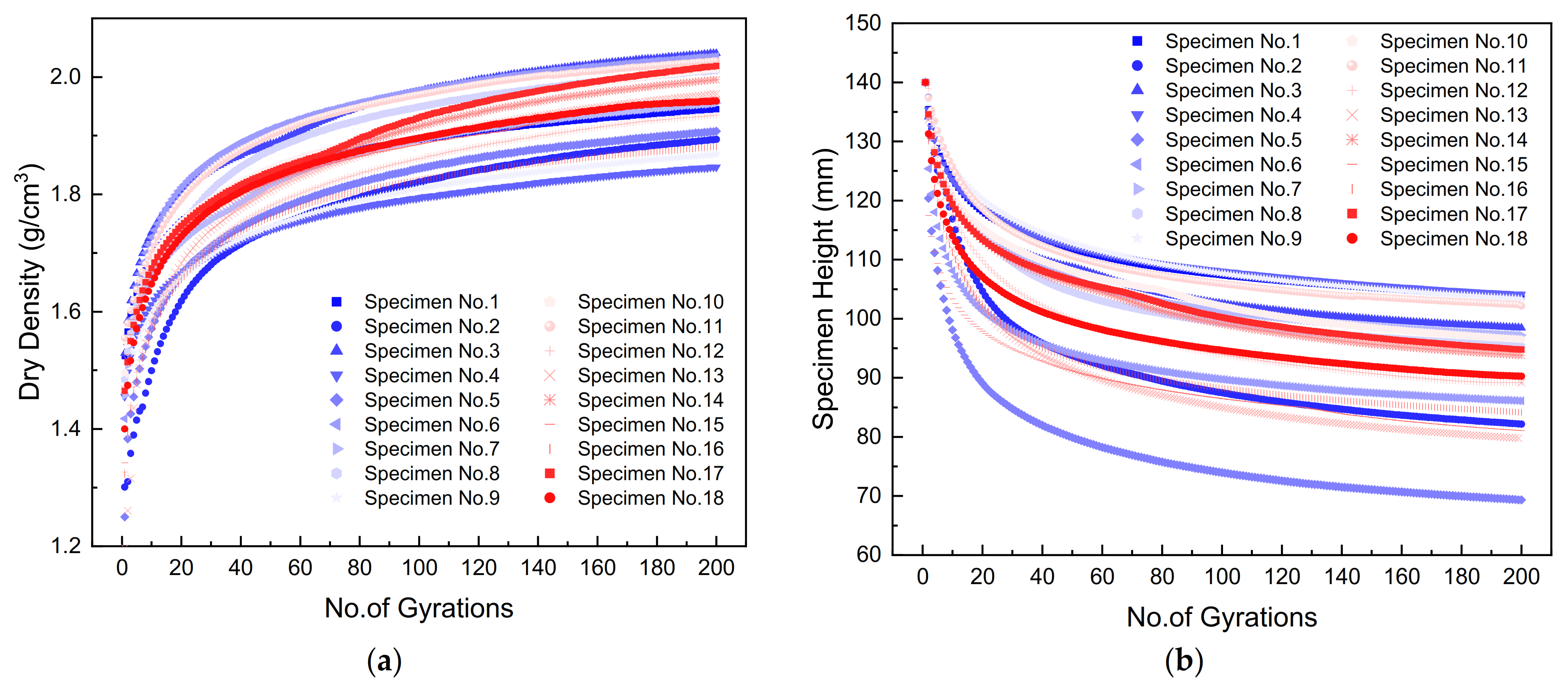
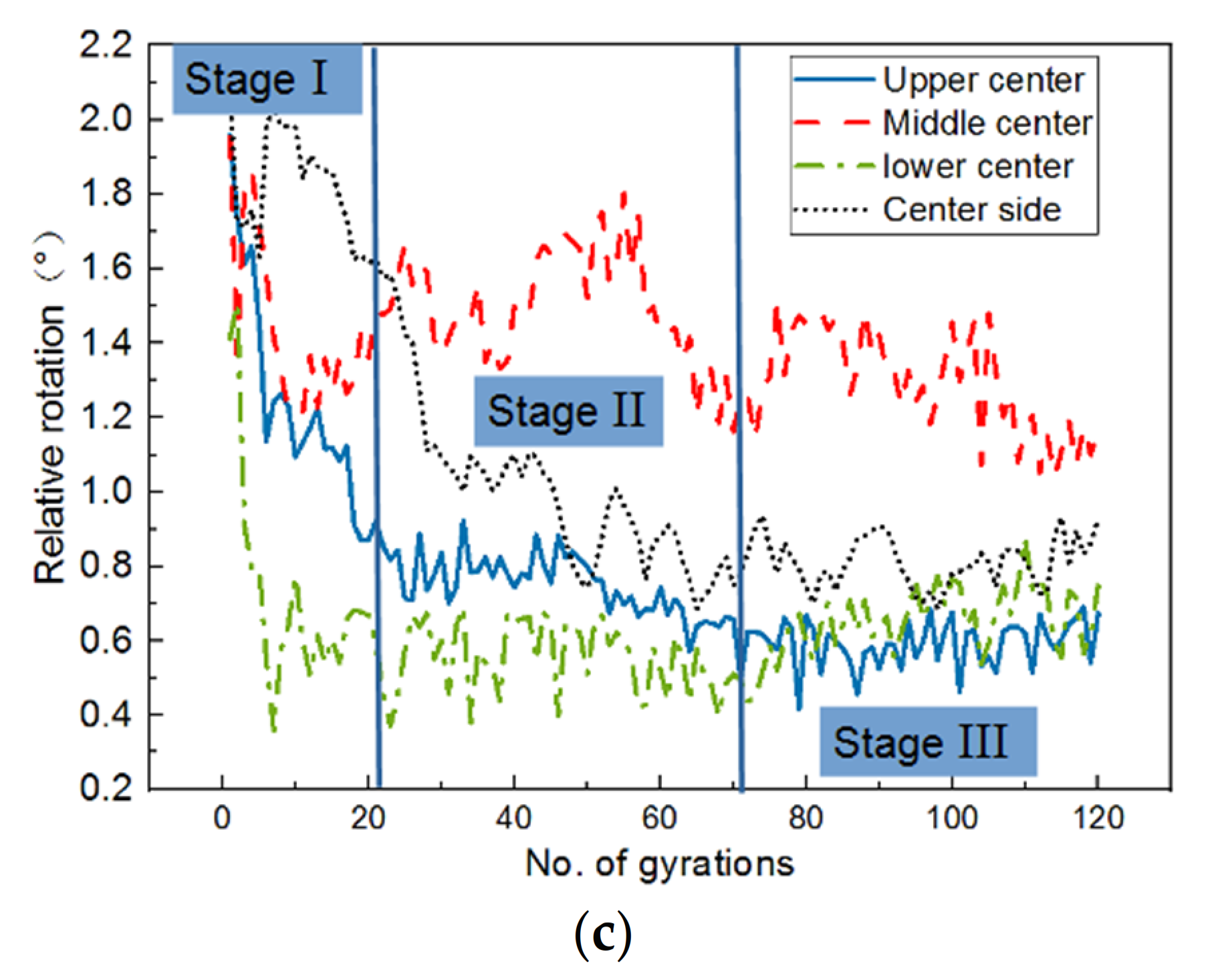
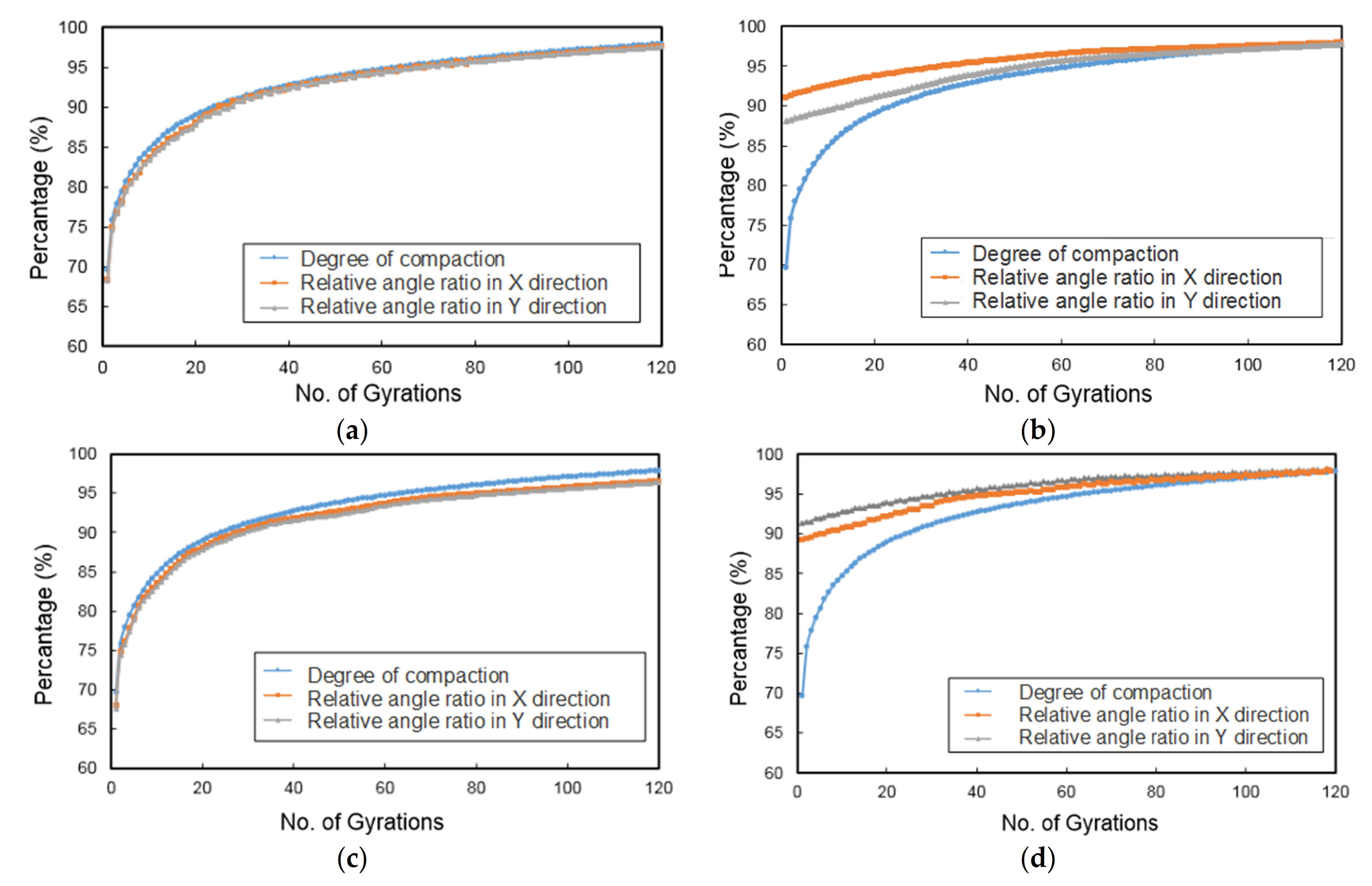
3.2. Distinct Stages of Gyratory Compaction
3.3. Characteristics of Gyratory Compaction
4. The Characteristics of Meso-Scale Particle Movement
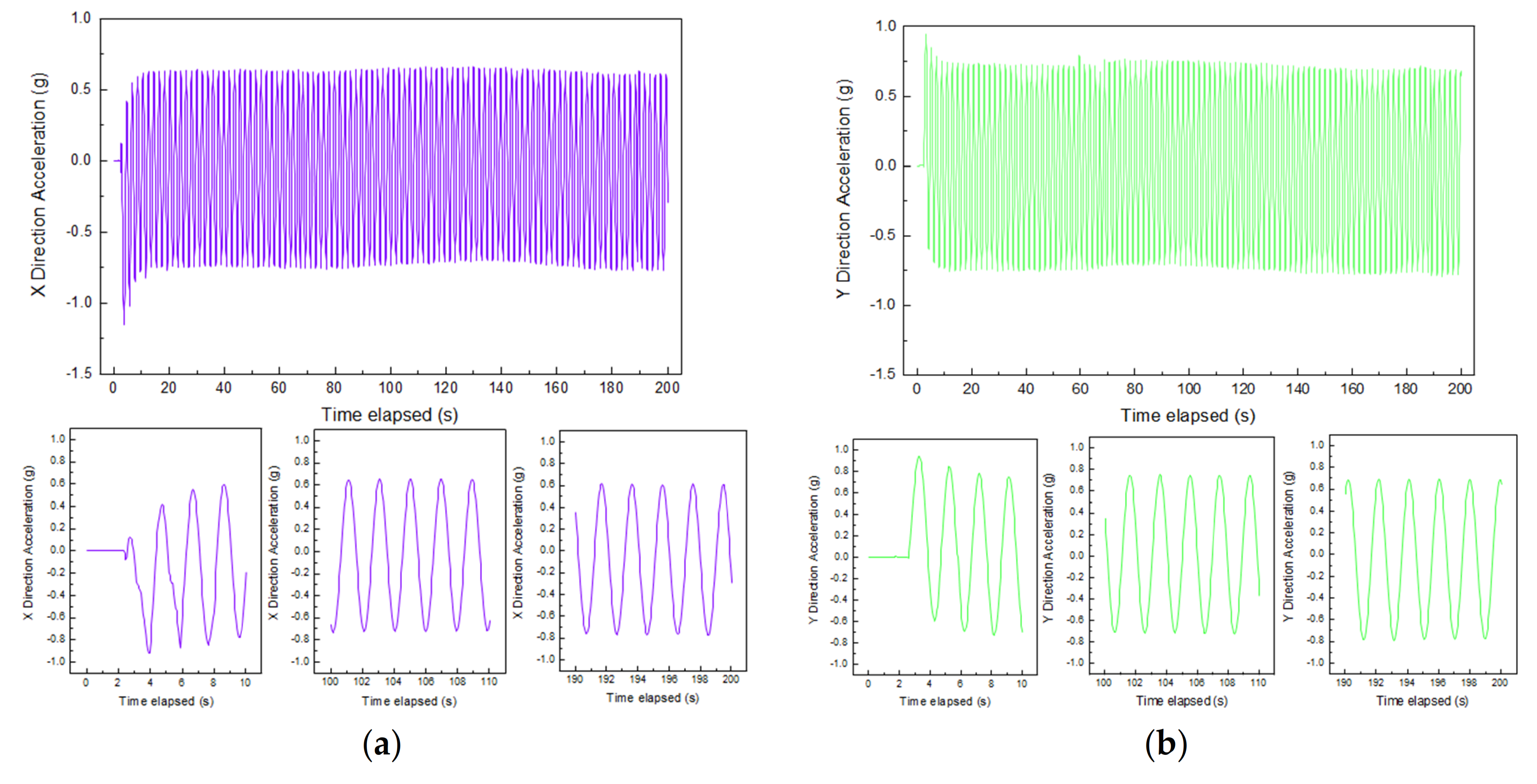
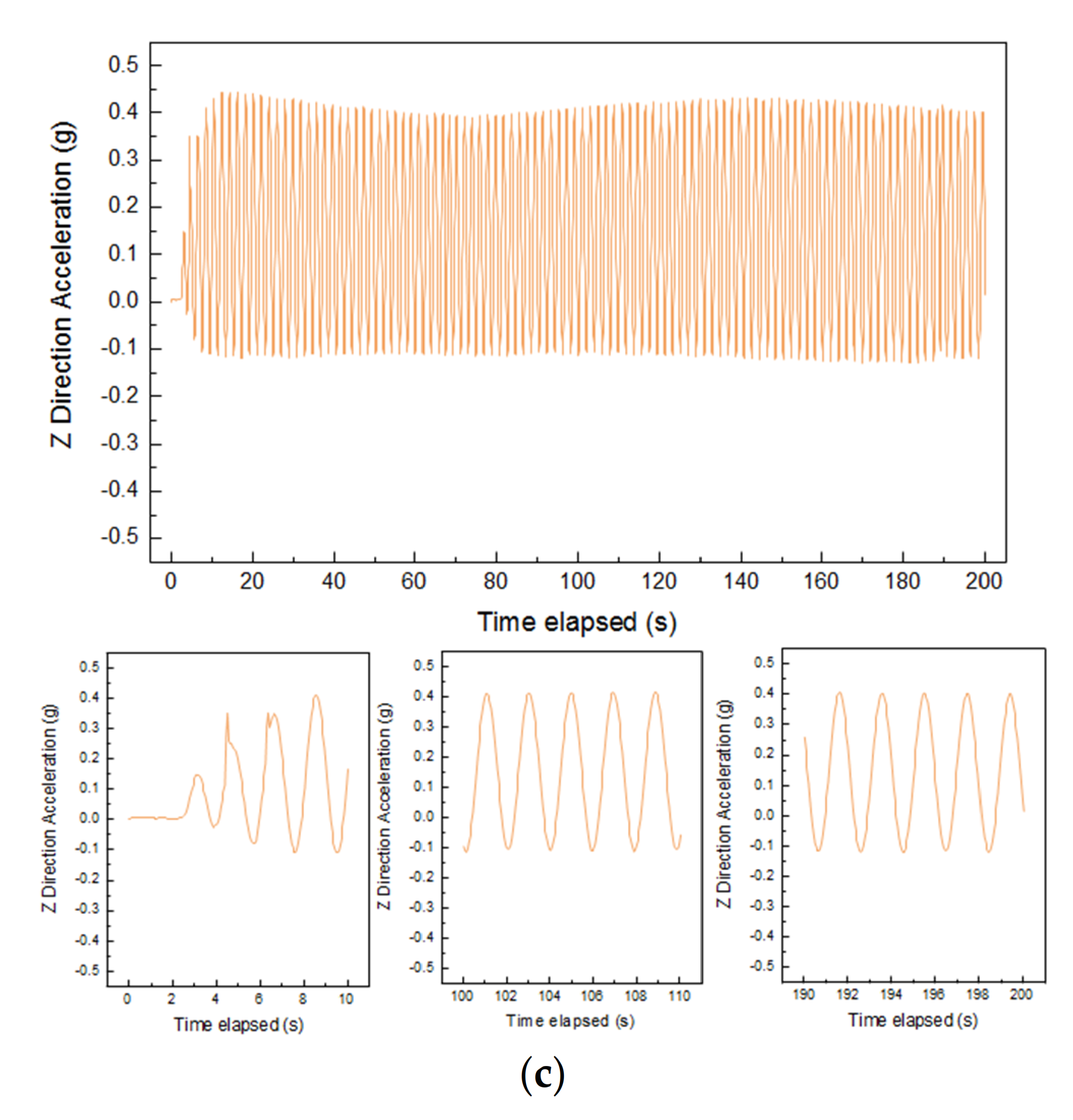
4.1. Acceleration of Particles at Different Locations
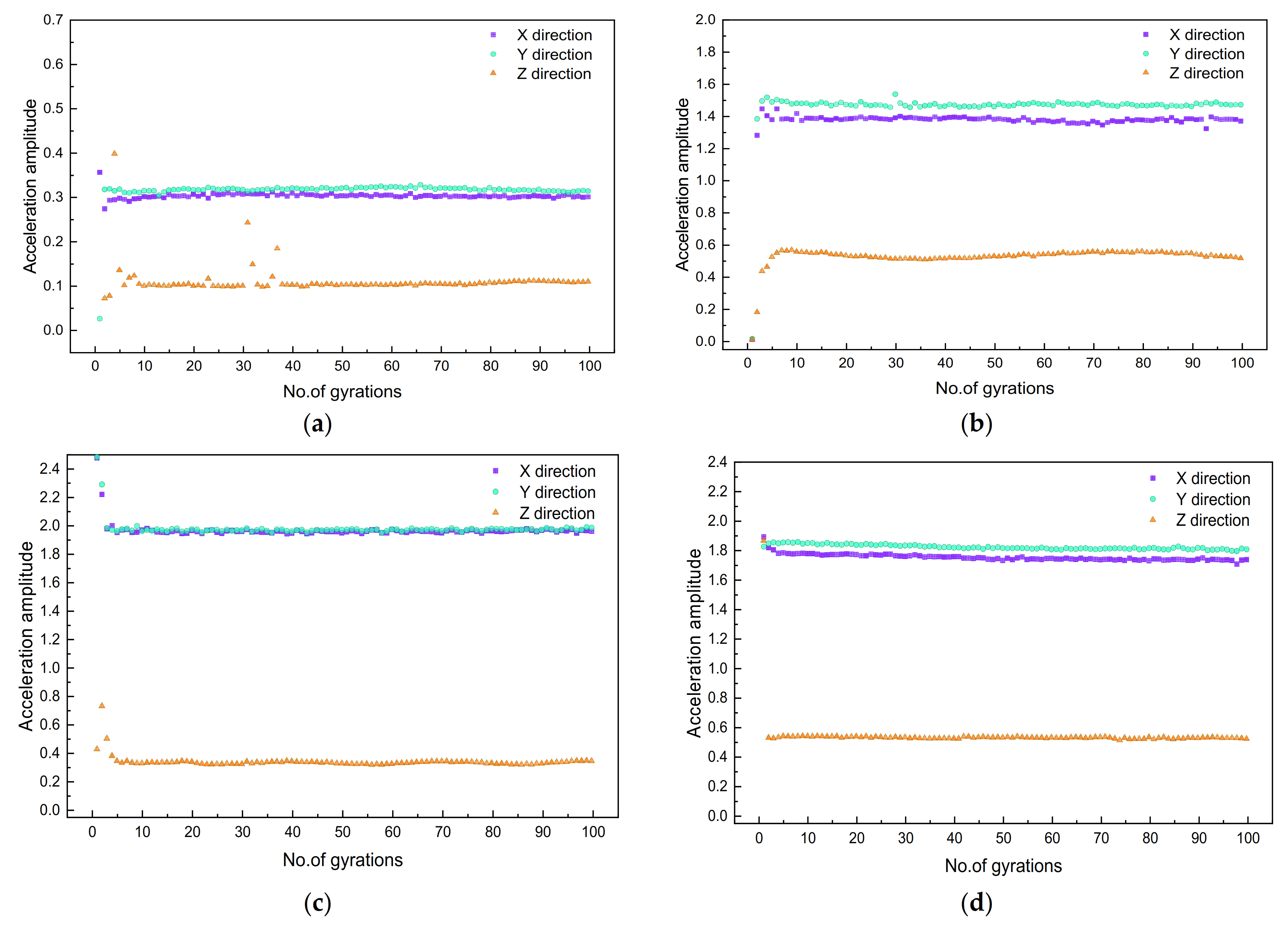
4.2. Characteristic Acceleration Value of Particles at Different Locations
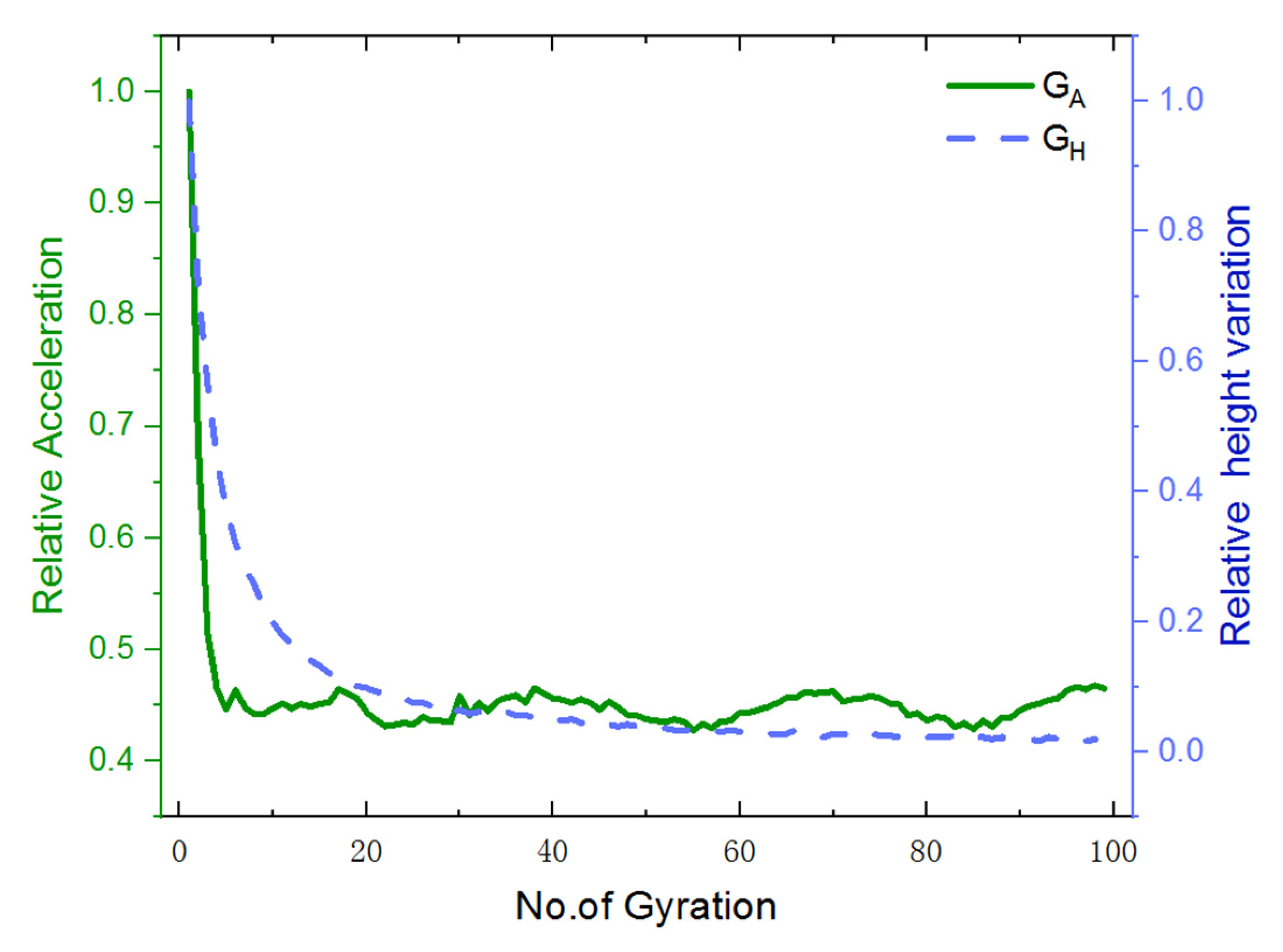
4.3. Relationship between Particle Acceleration and Rate of Change in Specimen Height
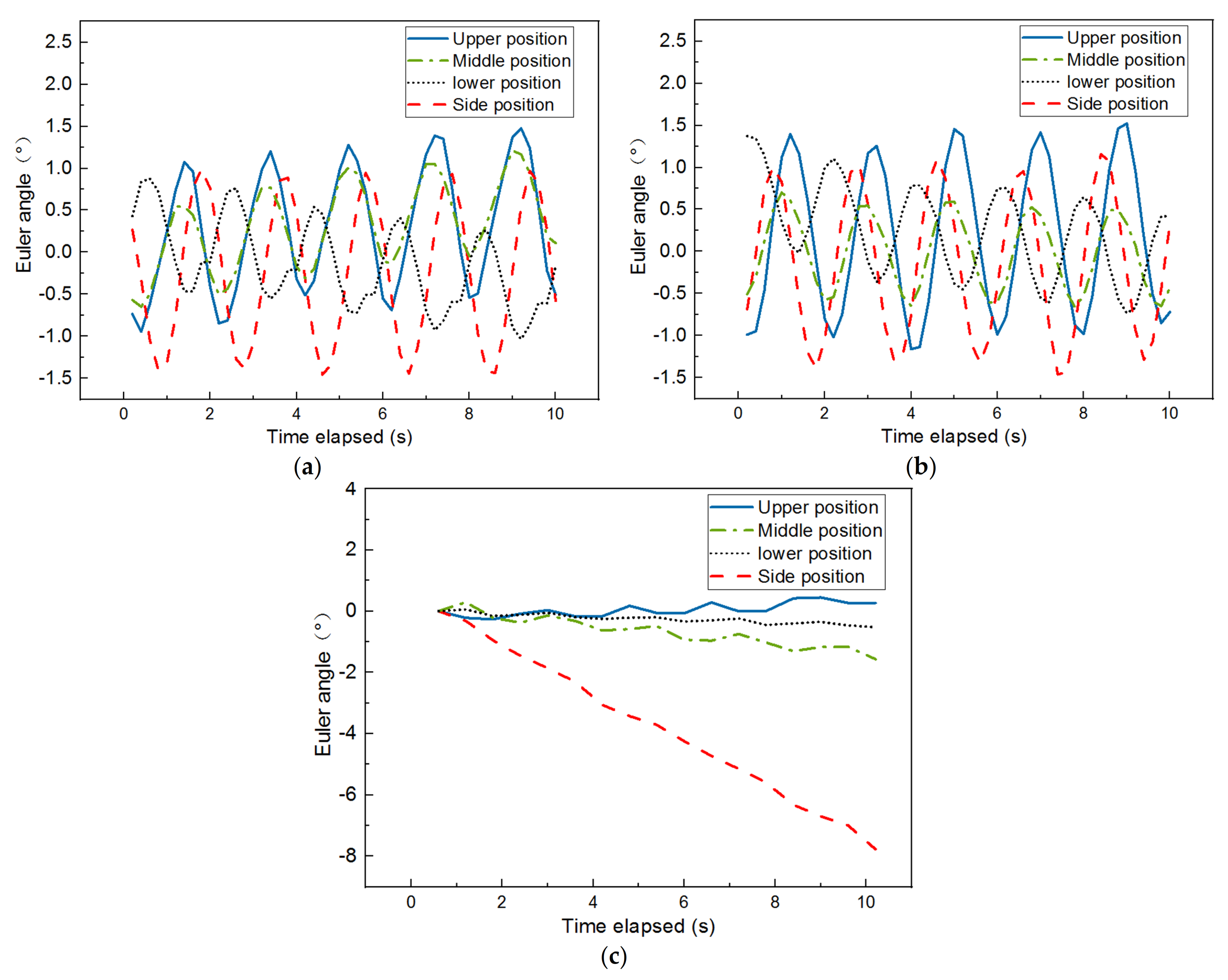
4.4. Euler Angle of Particles at Different Locations
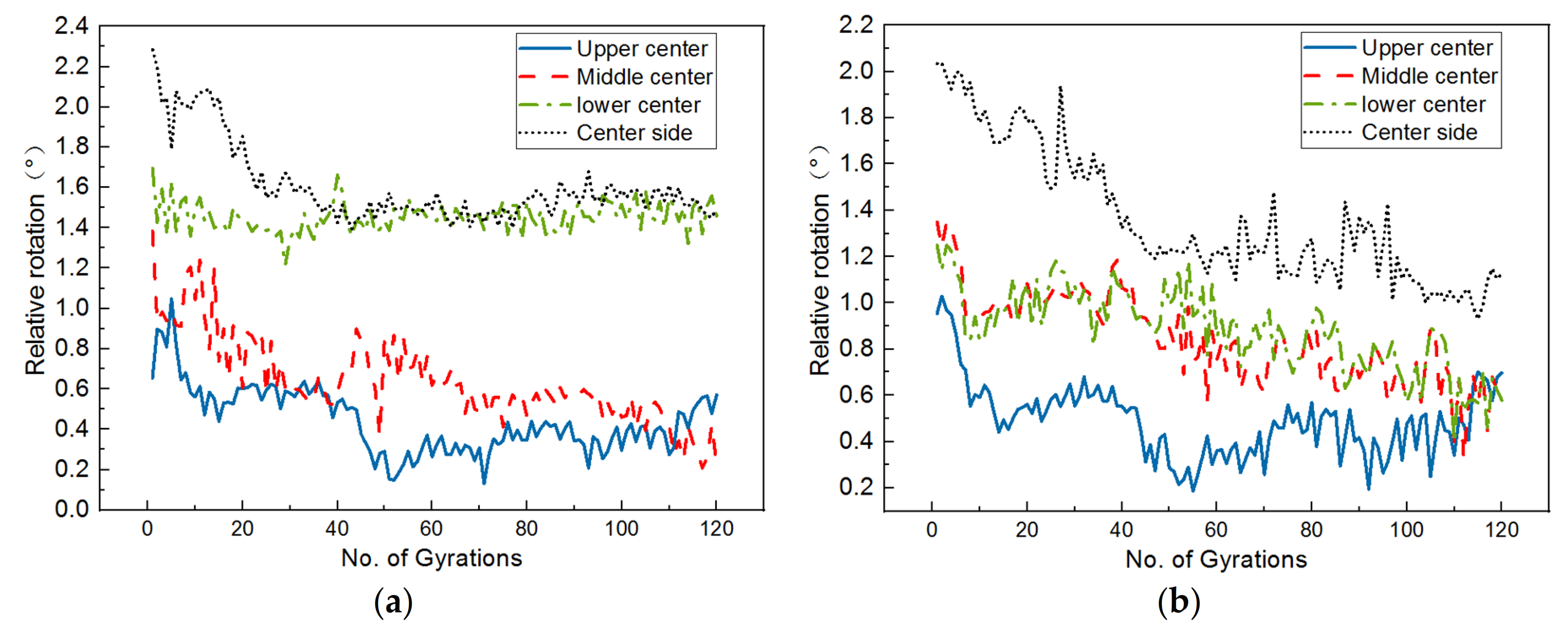
4.5. Relative Rotation of Particles at Different Locations
4.6. Relationship between Relative Rotation and Dry Density Change
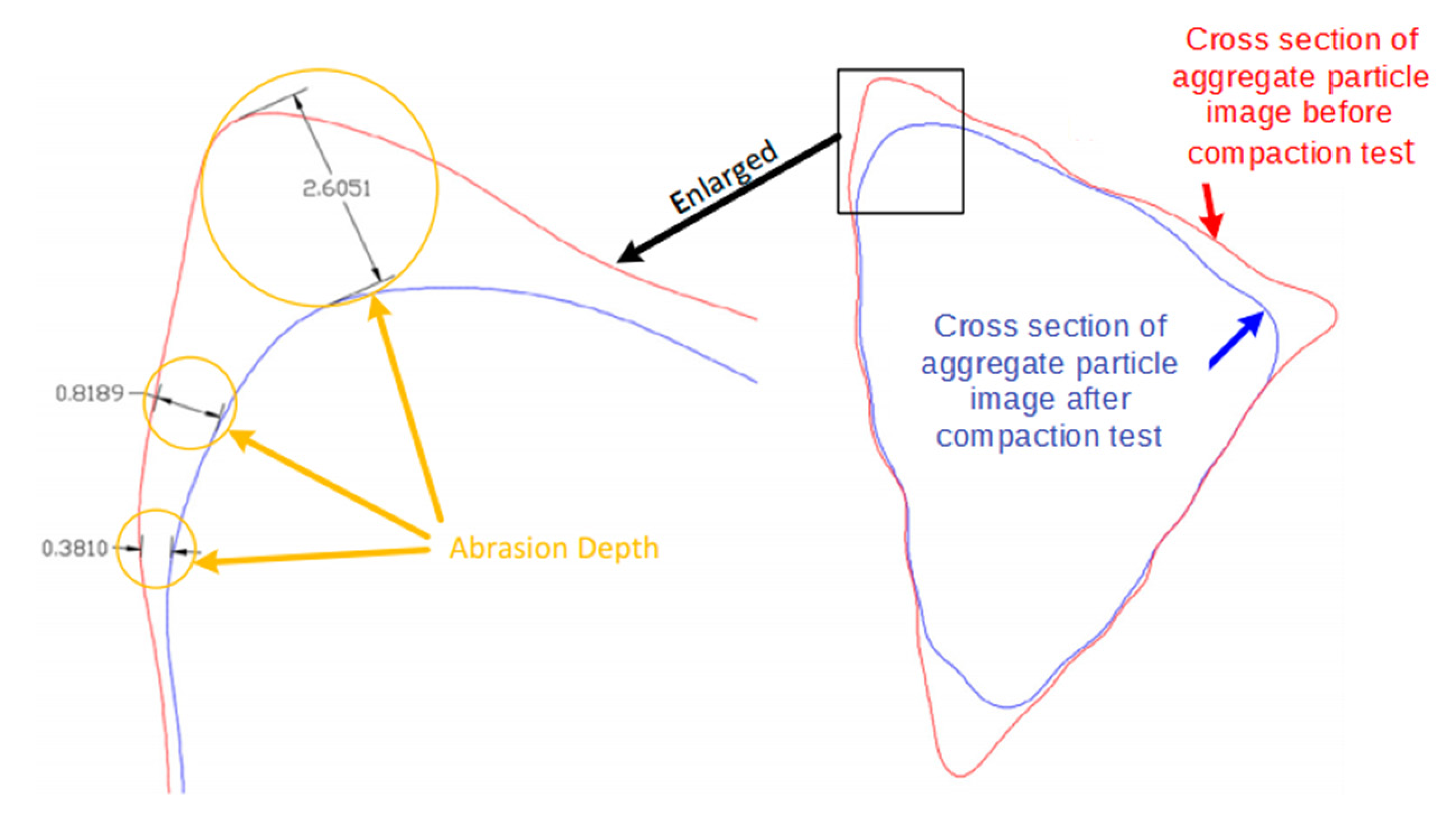
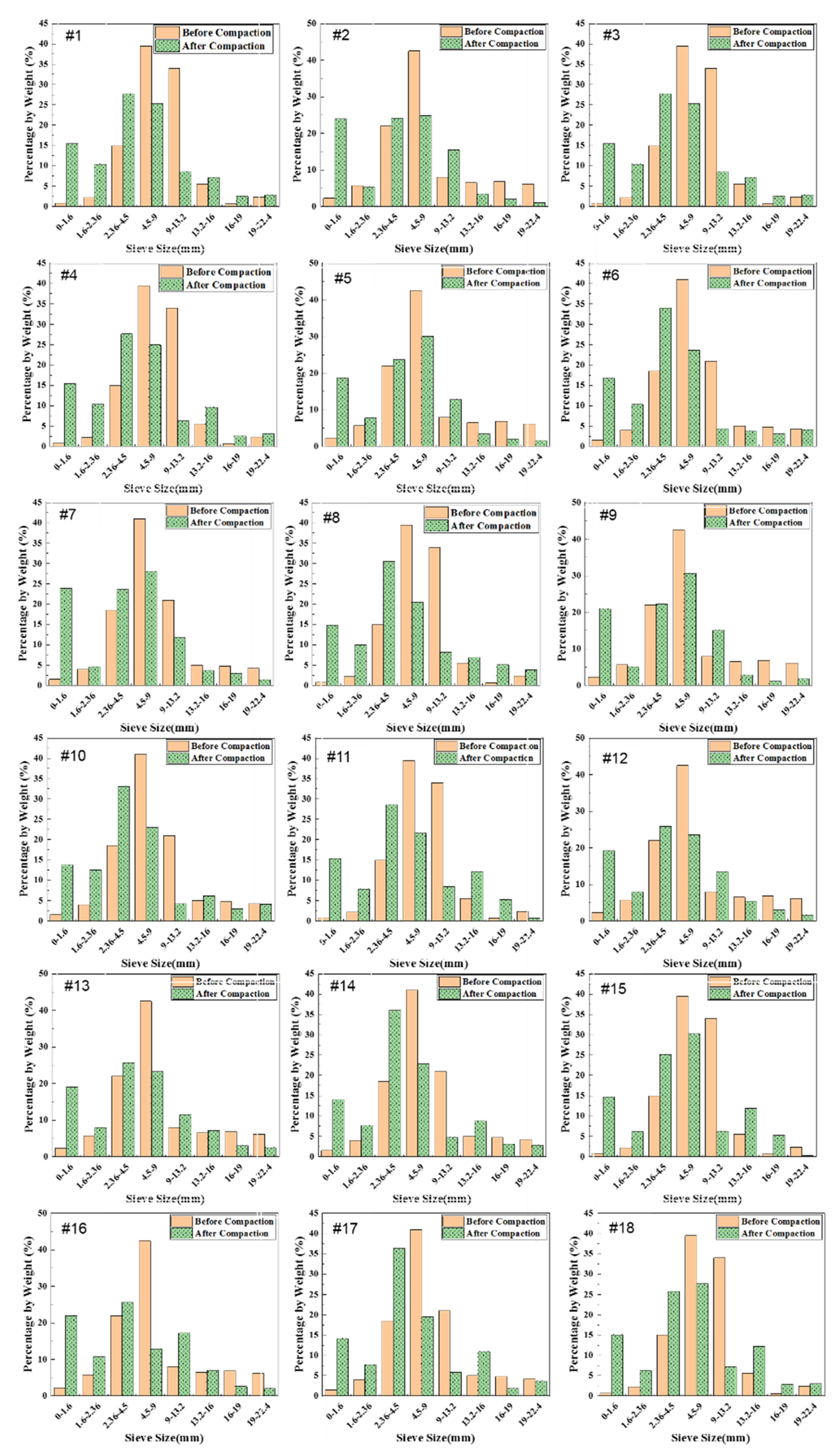
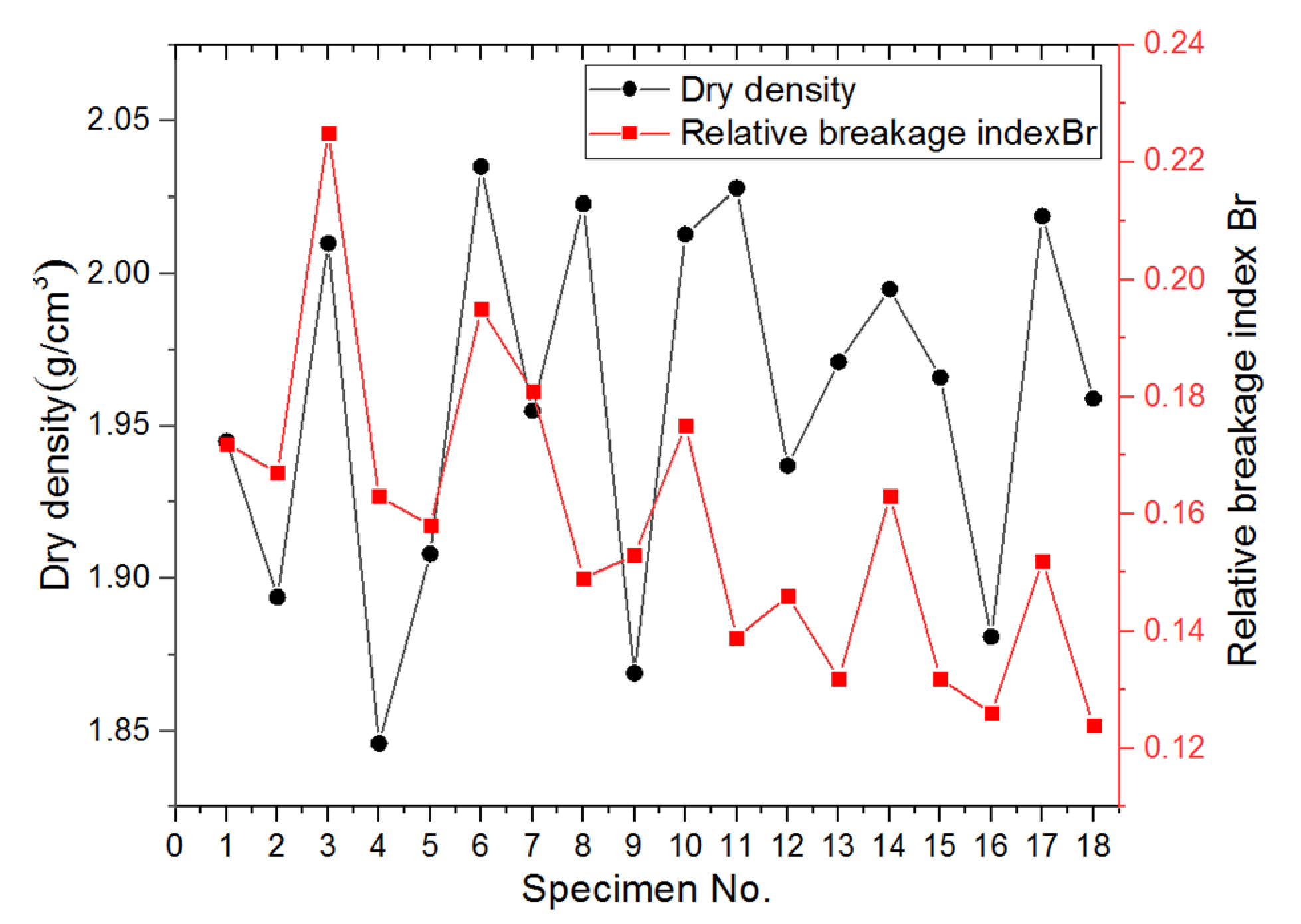
4.7. Quantification of Particle Abrasion and Breakage
5. Discussion
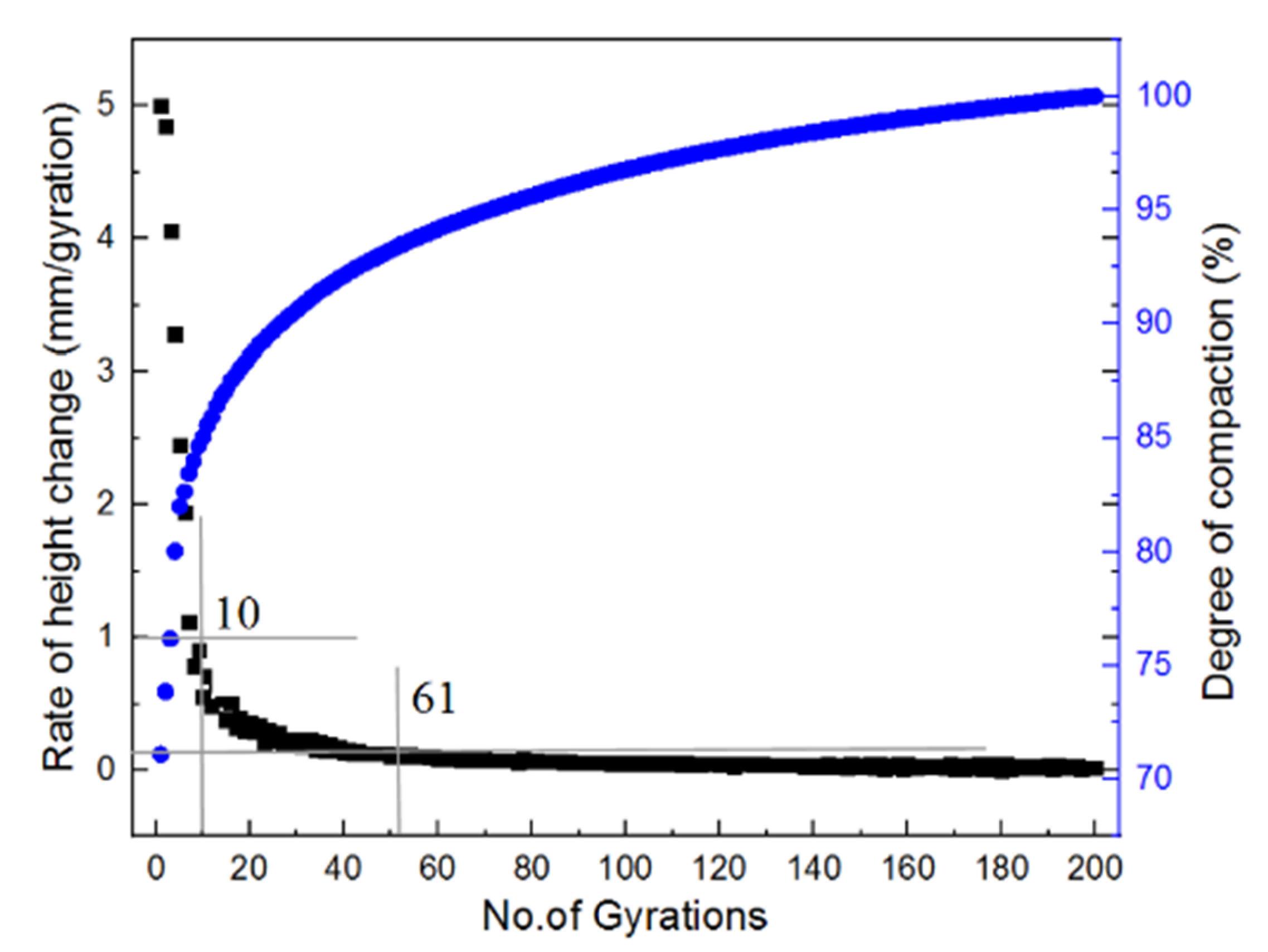
- Stage I, self-compaction stage. During this stage, particles exhibit large relative rotation with a nearly linear decrease rate, resulting in significant height reduction (or density increase).
- Stage II, transition stage. During this stage, particle movement is restricted as represented by the reduced relative rotation. However, compaction still continues as represented by the stable acceleration, resulting in further reduction in specimen height.
- Stage III, stable stage. During this stage, particle movement is significantly restricted by the compaction-induced packing structure, and very minimal height (or density) change is further achieved.
6. Summary and Conclusions
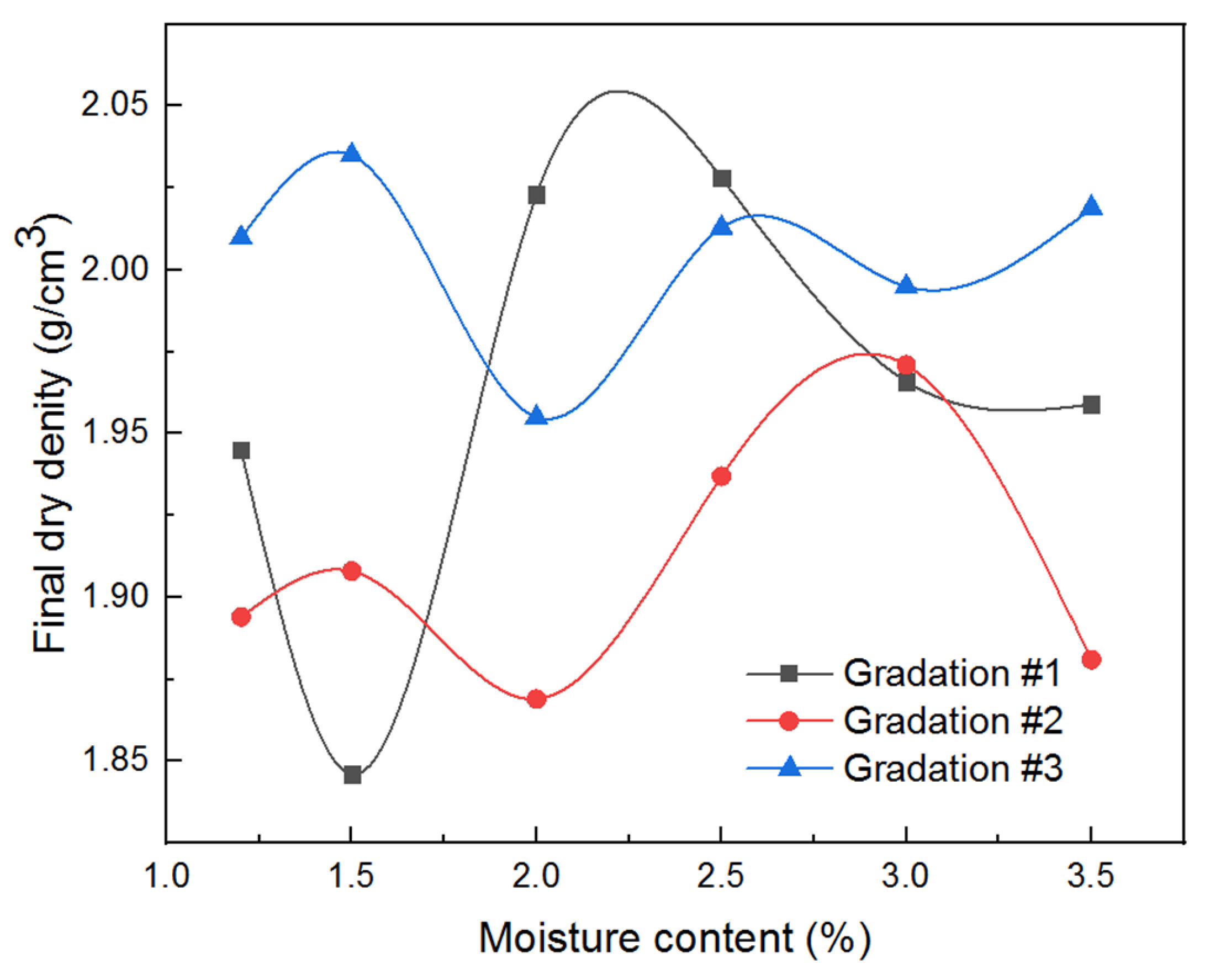
- The best compaction performance was achieved for the gyratory specimen with the scaled aggregate gradation #3, a moisture content of 1.5%, and a vertical pressure of 800 kPa.
- Among the influential parameters studied, gradation was found to have the greatest influence on gyratory compaction quality, followed sequentially by vertical pressure and moisture content.
- The gyratory compaction process can be consistently divided into three distinct stages according to both macro-scale performance indicators and meso-scale particle movement characteristics.
- Meso-scale particle movement characteristics at the upper center of the specimen are promising indicators of compaction quality.
- Extreme caution is needed when compacting unbound permeable aggregates in order to reach a cost-effective balance between the quality of compaction and the extent of particle breakage.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Cho, S.D.; Lee, D.Y.; Kim, N.H. Effect of the Crack Prevention of Asphalt Pavement Using Geosynthetics. GeoCongress 2006, 11, 1–6. [Google Scholar] [CrossRef]
- Nurmikolu, A. Degradation and Frost Susceptibility of Crushed Rock Aggregates Used in Structural Layers of Railway Track. Ph.D. Dissertation, Tampere University of Technology, Tampere, Finland, 2015. [Google Scholar]
- Vallejo, L.E.; Lobo, G.S.; Hammer, K. Degradation of a Granular Base under a Flexible Pavement: DEM Simulation. Int. J. Geomech. 2006, 6, 435–439. [Google Scholar] [CrossRef]
- Ziauddin, A.K.; Hamad, I.A.W.; Ibrahim, A.; Rezqallah, R. Comparative study of asphalt concrete laboratory compaction methods to simulate field compaction. Constr. Build. Mater. 1998, 12, 373–384. [Google Scholar] [CrossRef]
- Mohammed, M.M.; Hashim, R.; Salman, A. Effective improvement depth for ground treated with rapid impact compaction. Sci. Res. Essays 2010, 5, 2686–2693. [Google Scholar]
- Teresa, K.; Lin, Y.; Rowan, P. Static and vibration compaction and microstructure analysis on plain-woven textile fabrics. Compos. Part A Appl. Sci. Manuf. 2008, 39, 488–502. [Google Scholar] [CrossRef]
- Polaczyk, P.; Han, B.Y.; Huang, B.S.; Jia, X.Y.; Shu, X. Evaluation of the hot mix asphalt compactability utilizing the impact compaction method. Constr. Build. Mater. 2018, 187, 131–137. [Google Scholar] [CrossRef]
- Du, Y.F.; Liu, P.S.; Tian, J.; Zhang, J.; Zheng, Y. Preliminary Investigation of the Feasibility of Using a Superpave Gyratory Compactor to Design Cement-Treated Aggregate Mixture. Appl. Sci. 2018, 8, 946. [Google Scholar] [CrossRef] [Green Version]
- Hu, W.; Jia, X.Y.; Huang, B.S.; Park, H. Evaluation of compactability of asphalt mixture utilizing asphalt vibratory compactor. Constr. Build. Mater. 2017, 139, 419–429. [Google Scholar] [CrossRef]
- Coyle, H.M.; West, E.C. Laboratory Compaction of a Silty Clay to Simulate Field Density Curves. Master’s Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 1986. [Google Scholar]
- McRae, J.L. Gyratory Testing Machine Technical Manual for Bituminous Mixtures, Soils, and Base Course Materials; Engineering Developments Company Inc.: Vicksburg, MA, USA, 1965. [Google Scholar]
- Kim, W.; Labuz, J. Resilient Modulus and Strength of Base Course with Recycled Bituminous Material; Final Rep. MN/RC 2007-05; Minnesota Department of Transportation: St. Paul, MN, USA, 2007.
- Gupta, S.; Kang, D.H.; Ranaivoson, A. Hydraulic, Mechanical, and Leaching Characteristics of Recycled Materials; Final Rep. MnDOT 2009-32; Minnesota Department of Transportation: St. Paul, MN, USA, 2009.
- White, G.; Gnanendran, C.T. The influence of compaction method and relative density on the strength and modulus of cementitiously stabilized pavement materials. Int. J. Pavement Eng. 2005, 6, 97–110. [Google Scholar] [CrossRef]
- Ping, W.V.; Xing, G.; Leonard, M.; Yang, Z. Evaluation of Laboratory Compaction Techniques for Simulating Field Soil Compaction—Phase II; Research Rep. No. FL/DOT/RMC/BB—890(F); Florida State University: Tallahassee, FL, USA, 2003. [Google Scholar]
- Williams, S.G. Comparison of the Superpave gyratory and proctor compaction methods for the design of roller-compacted concrete pavements. Transp. Res. Rec. 2013, 2342, 106–112. [Google Scholar] [CrossRef]
- Li, C.; Zheng, J.; Zhang, Z.; Sha, A.; Li, J. Morphology-based indices and recommended sampling sizes for using image-based methods to quantify degradations of compacted aggregate materials. Constr. Build. Mater. 2020, 230, 116970. [Google Scholar] [CrossRef]
- Bian, X.C.; Huang, H.; Tutumluer, E.; Gao, Y. “Critical Particle Size” and Ballast Gradation Studied by Discrete Element Modeling. Transp. Geotech. 2016, S2214391216000040. [Google Scholar] [CrossRef]
- Sevi, A.; Louis, G. Cyclic behaviors of railroad ballast within the parallel gradation scaling framework. J. Mater. Civ. Eng. 2015, 24, 797–804. [Google Scholar] [CrossRef]
- Huang, H. Discrete Element Modeling of Railroad Ballast Using Imaging Based Aggregate Morphology Characterization; University of Illinois at Urbana-Champaign: Champaign, IL, USA, 2010. [Google Scholar]
- Tutumluer, E.; Huang, H.; Hashash, Y.; Ghaboussi, J. Aggregate shape effects on ballast tamping and railroad track lateral stability. In Proceedings of the AREMA Annual Conference, Louisville, KY, USA, 17–20 September 2006; pp. 17–20. [Google Scholar]
- Lo, K.W.; Peng, L.O.; Seng, L.L. Unified approach to ground improvement by heavy tamping. J. Geotech. Eng. 1990, 116, 514–527. [Google Scholar] [CrossRef]
- Ying, L.J.; Li, Y.Z. Research on a new type tamping device integrating tamper and stabilizer. Constr. Mach. Equip. 2008, 39, 20–23. [Google Scholar]
- Li, P.; Ding, Z.; Rao, W. Evaluation of deformation properties of asphalt mixture using aggregate slip test. Int. J. Pavement Eng. 2016, 17, 542–549. [Google Scholar] [CrossRef]
- Guo, H.; Zhao, Y.; Zhang, D.; Hang, M. Study of movement of coarse aggregates in the formation process of asphalt mixture in the laboratory. Constr. Build. Mater. 2016, 111, 743–750. [Google Scholar] [CrossRef] [Green Version]
- Li, J. Effect of aggregate contact characteristics on densification properties of asphalt mixture. Constr. Build. Mater. 2019, 204, 691–702. [Google Scholar] [CrossRef]
- Liu, S.S.; Huang, H.; Qiu, T.; Kerchof, B. Characterization of Ballast Particle Movement at Mud Spot. J. Mater. Civ. Eng. 2019, 31, 04018339. [Google Scholar] [CrossRef]
- Liu, S.S.; Huang, H.; Qiu, T.; Gao, L. Comparison of Laboratory Testing Using SmartRock and Discrete Element Modeling of Ballast Particle Movement. J. Mater. Civ. Eng. 2016, D6016001. [Google Scholar] [CrossRef]
- Wang, X.; Shen, S.H.; Huang, H.; Luiz, C.A. Characterization of particle movement in superpave gyratory compactor at meso-scale using SmartRock sensors. Constr. Build. Mater. 2018, 175, 206–214. [Google Scholar] [CrossRef]
- TB10625-2017, Code for Design of Heavy Haul Railway [S]. Available online: https://www.doc88.com/p-7075038806340.html?r=1 (accessed on 27 July 2021).
- Trinh, V.N.; Tang, A.M.; Cui, Y.J.; Dupla, J.C.; Canou, J.; Calon, N.; Lambert, L.; Robinet, A.; Schoen, O. Mechanical characterisation of the fouled ballast in ancient trail way track sub-structure by large-scale triaxial tests. Soils Found 2012, 52, 511–523. [Google Scholar] [CrossRef]
- Zhang, T.W.; Cui, Y.J.; Lamas-Lopez, F.; Calon, N.; Costa D’Aguiar, S. Modelling stress distribution in substructure of French conventional railway tracks. Constr. Build. Mater. 2016, 116, 326–334. [Google Scholar] [CrossRef]
- Ebrahimi, A.; Tinjum, J.M.; Edil, T.B. Deformational behavior of fouled railway ballast. Can. Geotech. J. 2015, 52, 344–355. [Google Scholar] [CrossRef]
- Wang, H.L.; Cui, Y.J.; Lamas-Lopez, F.; Calon, N.; Saussine, G.; Dupla, J.C.; Canou, J.; Aimedieu, P.; Chen, R.P. Investigation on the mechanical behavior of track-bed materials at various contents of coarse grains. Constr. Build. Mater. 2018, 164, 228–237. [Google Scholar] [CrossRef]
- Wang, H.L.; Cui, Y.J.; Lamas-Lopez, F.; Dupla, J.C.; Canou, J.; Calon, N.; Saussine, G.; Aimedieu, P.; Chen, R.P. Effects of inclusion contents on the resilient modulus and damping ratio of unsaturated track-bed materials. Can. Geotech. J. 2017, 54, 1672–1681. [Google Scholar] [CrossRef]
- Anagnosti, P. Les propriétés de déformation et de résistance des matériaux àgros grains. Rev. Fr. Géotech. 1982, 18, 5–19. [Google Scholar] [CrossRef] [Green Version]
- Indraratna, B.; Wijewardena, L.S.S.; Balasubramaniam, A.S. Large scale triaxial testing of greywacke rock fill. Géotechnique 1993, 43, 37–51. [Google Scholar] [CrossRef]
- Pedro, L. De l’étude du Comportement Mécanique de sols Hétérogènes Modèlesà son Application au cas des sols Naturels. Ph.D. Thesis, Ecole Nationale desPonts et Chaussées, Champs-sur-Marne, France, 2004. [Google Scholar]
- Xiao, Y.J.; Wang, M.; Chang, Z.; Zheng, K.; Chen, L.; Chen, X. Evaluating meso-scale particle movement in gyratory compaction tests of railroad ballasts. In Proceedings of the 16th Asian Regional Conference on Soil Mechanics and Geotechnical Engineering, Taipei, Taiwan, 21–25 October 2019. [Google Scholar]
- Kumara, J.J.; Hayano, K. Deformation characteristics of fresh and fouled ballasts subjected to tamping maintenance. Soils Found. 2016, 56, 652–663. [Google Scholar] [CrossRef]
- Martey, E.N.; Attoh-Okine, N. Modeling tamping recovery of track geometry using the copula-based approach. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2018, 232, 2079–2096. [Google Scholar] [CrossRef]
- Kim, D.S.; Hwang, S.H.; Kono, A.; Matsushima, T. Evaluation of ballast compactness during the tamping process by using an image-based 3D discrete element method. Proc. Inst. Mech. 2018, 232, 1951–1964. [Google Scholar] [CrossRef]
- Cominsky, R.; Leahy, R.B.; Harrigan, E.T. “Level One Mix Design: Materials Selection, Compaction, and Conditioning,” SHRP-A-408 Strategic Highway Research Program; National Research Council: Washington, DC, USA, 1994. [Google Scholar]
- Zheng, J.; Hryciw, R.D. Traditional soil particle sphericity, roundness and surface roughness by computational geometry. Géotechnique 2015, 65, 494–506. [Google Scholar] [CrossRef]
- Zheng, J.; He, H.; Alimohammadi, H. Three-dimensional Wadell roundness for particle angularity characterization of granular soils. Acta Geotech. 2021, 16, 133–149. [Google Scholar] [CrossRef]
- Zhang, C.; Wang, H.N.; You, Z.P. Compaction characteristics of asphalt mixture with different gradation type through superpave gyratory compaction and X-ray CT scanning. Constr. Build. Mater. 2016, 129, 243–255. [Google Scholar] [CrossRef]
- Bobby, O.H. Crushing of Soil Particles. J. Geotech. Eng. 1985, 111, 1177–1192. [Google Scholar]


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Specimen Number | Moisture Content (A, %) | Vertical Pressure (B, kPa) | Gradation Type (C) | Combination Code |
|---|---|---|---|---|
| 1 | 1.2 (1) | 400 (1) | #1 (1) | A1B1C1 |
| 2 | 1.2 (1) | 600 (2) | #2 (2) | A1B2C2 |
| 3 | 1.2 (1) | 800 (3) | #3 (3) | A1B3C3 |
| 4 | 1.5 (2) | 400 (1) | #1 (1) | A2B1C1 |
| 5 | 1.5 (2) | 600 (2) | #2 (2) | A2B2C2 |
| 6 | 1.5 (2) | 800 (3) | #3 (3) | A2B3C3 |
| 7 | 2.0 (3) | 600 (2) | #3 (3) | A3B2C3 |
| 8 | 2.0 (3) | 800 (3) | #1 (1) | A3B3C1 |
| 9 | 2.0 (3) | 400 (1) | #2 (2) | A3B1C2 |
| 10 | 2.5 (4) | 600 (2) | #3 (3) | A4B2C3 |
| 11 | 2.5 (4) | 800 (3) | #1 (1) | A4B3C1 |
| 12 | 2.5 (4) | 400 (1) | #2 (2) | A4B1C2 |
| 13 | 3.0 (5) | 800 (3) | #2 (2) | A5B3C2 |
| 14 | 3.0 (5) | 400 (1) | #3 (3) | A5B1C3 |
| 15 | 3.0 (5) | 600 (2) | #1 (1) | A5B2C1 |
| 16 | 3.5 (6) | 800 (3) | #2 (2) | A6B3C2 |
| 17 | 3.5 (6) | 400 (1) | #3 (3) | A6B1C3 |
| 18 | 3.5 (6) | 600 (2) | #1 (1) | A6B2C1 |
| Specimen Number | Moisture Content (A, %) | / | Vertical Pressure (B, kPa) | Gradation Type (C) | Final Achieved Dry Density (g/cm3) |
|---|---|---|---|---|---|
| 1 | 1.2 (1) | 1 | 400 (1) | #1 (1) | 1.945 |
| 2 | 1.2 (1) | 2 | 600 (2) | #2 (2) | 1.894 |
| 3 | 1.2 (1) | 3 | 800 (3) | #3 (3) | 2.010 |
| 4 | 1.5 (2) | 1 | 400 (1) | #1 (1) | 1.846 |
| 5 | 1.5 (2) | 2 | 600 (2) | #2 (2) | 1.908 |
| 6 | 1.5 (2) | 3 | 800 (3) | #3 (3) | 2.035 |
| 7 | 2.0 (3) | 1 | 600 (2) | #3 (3) | 1.955 |
| 8 | 2.0 (3) | 2 | 800 (3) | #1 (1) | 2.023 |
| 9 | 2.0 (3) | 3 | 400 (1) | #2 (2) | 1.869 |
| 10 | 2.5 (4) | 1 | 600 (2) | #3 (3) | 2.013 |
| 11 | 2.5 (4) | 2 | 800 (3) | #1 (1) | 2.028 |
| 12 | 2.5 (4) | 3 | 400 (1) | #2 (2) | 1.937 |
| 13 | 3.0 (5) | 1 | 800 (3) | #2 (2) | 1.971 |
| 14 | 3.0 (5) | 2 | 400 (1) | #3 (3) | 1.995 |
| 15 | 3.0 (5) | 3 | 600 (2) | #1 (1) | 1.966 |
| 16 | 3.5 (6) | 1 | 800 (3) | #2 (2) | 1.881 |
| 17 | 3.5 (6) | 2 | 400 (1) | #3 (3) | 2.019 |
| 18 | 3.5 (6) | 3 | 600 (2) | #1 (1) | 1.959 |
| 5.879 | 11.611 | 11.611 | 11.767 | M = 35.254 | |
| 5.789 | 11.867 | 11.695 | 11.46 | ||
| 5.847 | 11.776 | 11.948 | 12.027 | ||
| 5.978 | / | / | / | ||
| 5.932 | / | / | / | ||
| 5.859 | / | / | / | ||
| Rj | 0.189 | 0.256 | 0.337 | 0.567 |
| Factors | Sum of Squares | Degree of Freedom | Mean Square | F | Significance |
|---|---|---|---|---|---|
| Moisture content | 0.0077 | 5 | 0.0015 | 0.9845 | 0.4964 |
| Gradation | 0.0269 | 2 | 0.0134 | 8.6326 | 0.0172 |
| Gyratory pressure | 0.0103 | 2 | 0.0051 | 3.2976 | 0.1081 |
| Specimen Number | The Staged Point (i.e., Thresholding Number of Gyrations) of Particle Accelerations | |||
|---|---|---|---|---|
| Lower Center | Middle Center | Upper Center | Center Side | |
| 1 | 8 | 11 | 9 | 13 |
| 2 | 8 | 7 | 6 | 11 |
| 3 | 8 | 4 | 6 | 12 |
| 4 | 3 | 3 | 3 | 4 |
| 5 | 8 | 7 | 5 | 14 |
| 6 | 7 | 6 | 5 | 8 |
| 7 | 7 | 7 | 6 | 15 |
| 8 | 7 | 6 | 6 | 10 |
| 9 | 8 | 6 | 6 | 16 |
| 10 | 7 | 7 | 9 | 9 |
| 11 | 7 | 5 | 3 | 8 |
| 12 | 7 | 5 | 1 | 9 |
| 13 | 7 | 6 | 5 | 10 |
| 14 | 7 | 6 | 4 | 9 |
| 15 | 8 | 6 | 3 | 12 |
| 16 | 7 | 6 | 5 | 10 |
| 17 | 8 | 6 | 5 | 11 |
| 18 | 8 | 6 | 6 | 14 |
| Average | 7 | 6 | 5 | 11 |
| Position | Factor | Sum of Squares | Degree of Freedom | Mean Square | F | Significance |
|---|---|---|---|---|---|---|
| Upper center | Moisture content | 0.00 | 2 | 0.00 | 0.57 | 0.59 |
| Gradation | 0.01 | 5 | 0.00 | 1.05 | 0.47 | |
| Vertical pressure | 7.61 | 2 | 3.81 | 1589.56 | 0.00 | |
| Middle center | Moisture content | 0.66 | 2 | 0.33 | 148.00 | 0.00 |
| Gradation | 0.28 | 5 | 0.06 | 24.85 | 0.00 | |
| Vertical pressure | 0.12 | 2 | 0.06 | 28.00 | 0.00 | |
| Lower center | Moisture content | 0.00 | 2 | 0.00 | 1.00 | 0.42 |
| Gradation | 0.11 | 5 | 0.02 | 28.56 | 0.00 | |
| Vertical pressure | 0.00 | 2 | 0.00 | 1.00 | 0.42 | |
| Center side | Moisture content | 23.80 | 2 | 11.90 | 1.46 | 0.30 |
| Gradation | 57.01 | 5 | 11.40 | 1.40 | 0.34 | |
| Vertical pressure | 12.21 | 2 | 6.11 | 0.75 | 0.51 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiao, Y.; Wang, M.; Wang, X.; Ren, J.; Wang, W.; Chen, X. Evaluating Gyratory Compaction Characteristics of Unbound Permeable Aggregate Base Materials from Meso-Scale Particle Movement Measured by Smart Sensing Technology. Materials 2021, 14, 4287. https://doi.org/10.3390/ma14154287
Xiao Y, Wang M, Wang X, Ren J, Wang W, Chen X. Evaluating Gyratory Compaction Characteristics of Unbound Permeable Aggregate Base Materials from Meso-Scale Particle Movement Measured by Smart Sensing Technology. Materials. 2021; 14(15):4287. https://doi.org/10.3390/ma14154287
Chicago/Turabian StyleXiao, Yuanjie, Meng Wang, Xiaoming Wang, Juanjuan Ren, Weidong Wang, and Xiaobin Chen. 2021. "Evaluating Gyratory Compaction Characteristics of Unbound Permeable Aggregate Base Materials from Meso-Scale Particle Movement Measured by Smart Sensing Technology" Materials 14, no. 15: 4287. https://doi.org/10.3390/ma14154287