
Improved Accuracy of Riparian Zone Mapping Using Near Ground Unmanned Aerial Vehicle and Photogrammetry Method

Abstract
:1. Introduction
2. Materials and Methods
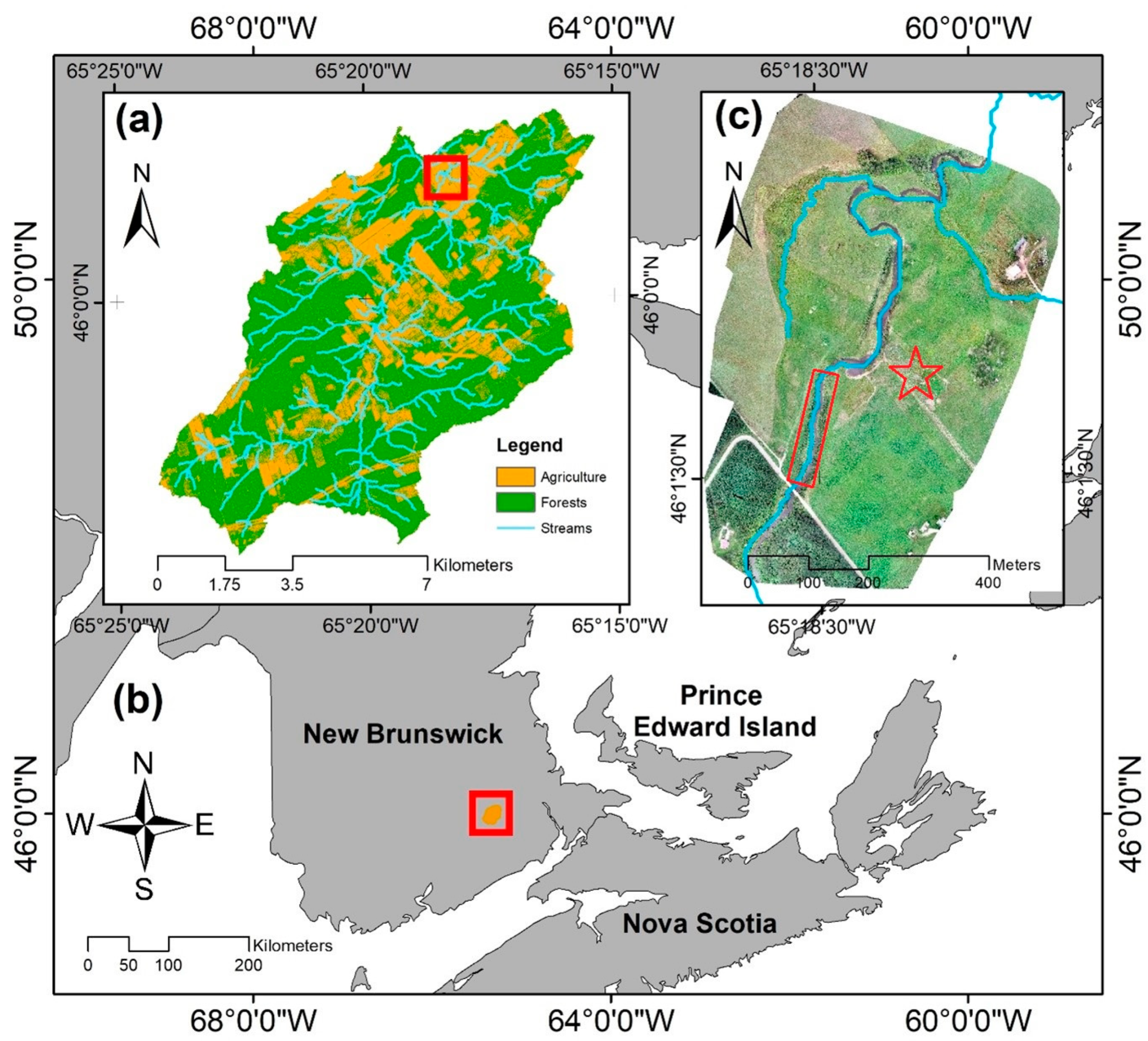
2.1. Study Area
2.2. Functional Riparian Zone Delineation
2.2.1. Online Available Data Interpolation
2.2.2. UAV and Sensor Description
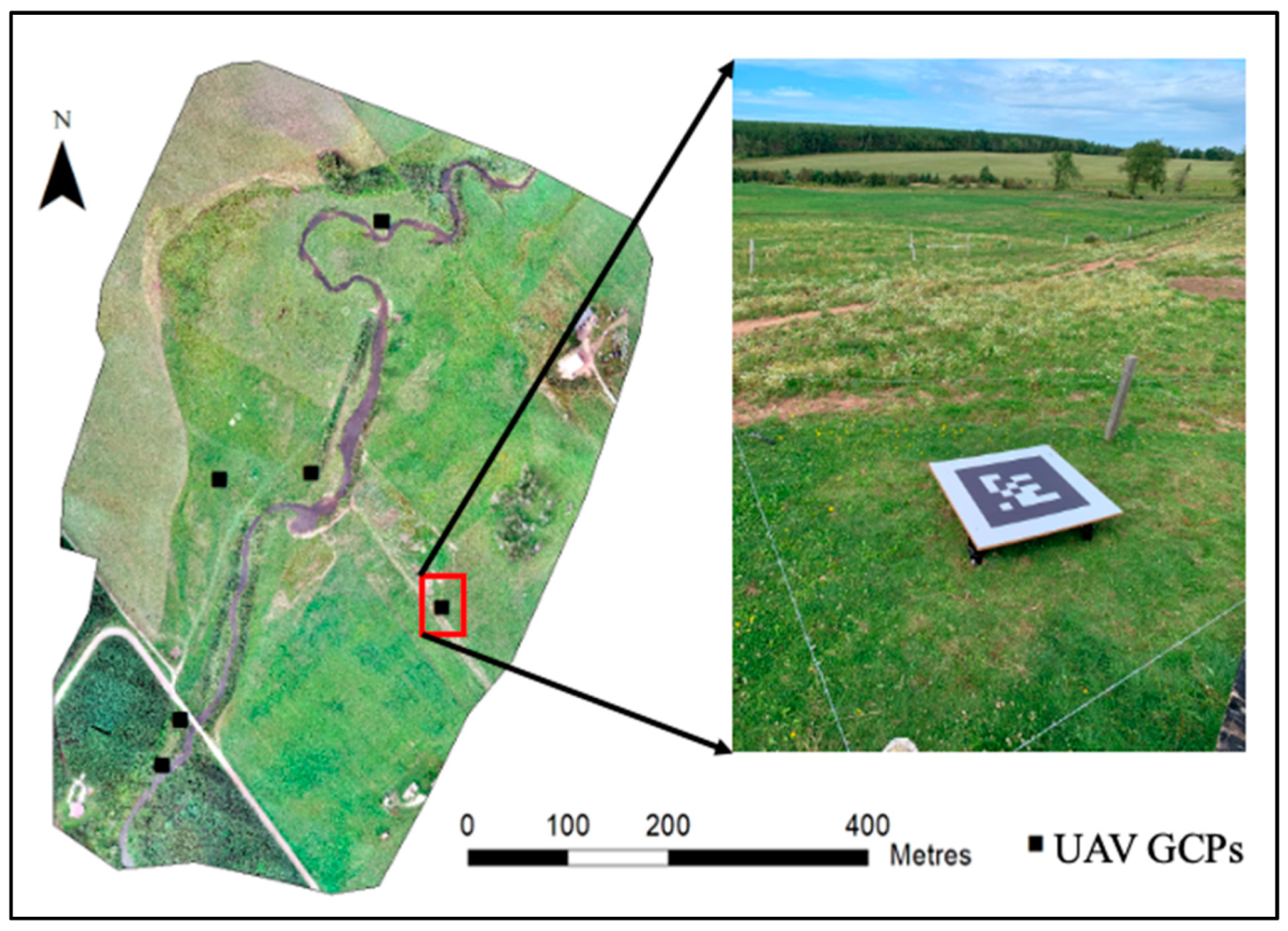
2.2.3. UAV Data Collection
2.2.4. Point Cloud Cleaning
2.2.5. Stream Network and Flow Initiation Thresholds
2.2.6. Functional Riparian Prediction
2.2.7. Field Validation
2.2.8. Statistical Analysis
3. Results
3.1. Interpolated DEMs and Geolocation Precision
3.2. The Optimal Parameter for Riparian Zone Delineation
3.3. Impacts of DEM Resolution on Prediction Accuracy
4. Discussion
4.1. Impact of the DEM Resolution
4.2. VDTCN Raster Performance in Each DEM
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Hill, A.R.; Cardaci, M. Denitrification and organic carbon availability in riparian wetland soils and subsurface sediments. Soil Sci. Soc. Am. J. 2004, 68, 320–325. [Google Scholar] [CrossRef]
- Naiman, R.J.; Decamps, H. The ecology of interfaces: Riparian zones. Annu. Rev. Ecol. Syst. 1997, 28, 621–658. [Google Scholar] [CrossRef] [Green Version]
- Swanson, S.; Miles, R.; Leonard, S.; Genz, K. Classifying rangeland riparian areas: The Nevada task force approach. J. Soil Water Conserv. 1988, 43, 259–263. [Google Scholar]
- Cooper, J.; Gilliam, J.; Daniels, R.; Robarge, W. Riparian areas as filters for agricultural sediment. Soil Sci. Soc. Am. J. 1987, 51, 416–420. [Google Scholar] [CrossRef]
- Meehan, W.R.; Swanson, F.J.; Sedell, J.R. Influences of riparian vegetation on aquatic ecosystems with particular reference to salmonid fishes and their food supply. In Proceedings of the Importance, Preservation and Management of Riparian Habitat: A Symposium, Tucson, Arizona, 9 July 1977; p. 137. [Google Scholar]
- Peterson, B.J.; Wollheim, W.M.; Mulholland, P.J.; Webster, J.R.; Meyer, J.L.; Tank, J.L.; Martí, E.; Bowden, W.B.; Valett, H.M.; Hershey, A.E. Control of nitrogen export from watersheds by headwater streams. Science 2001, 292, 86–90. [Google Scholar] [CrossRef]
- Swanson, F.; Gregory, S.; Sedell, J.; Campbell, A. Land-Water Interactions: The Riparian Zone. 1982. Available online: https://www.researchgate.net/publication/265105931_9_Land-Water_Interactions_The_Riparian_Zone (accessed on 1 April 2021).
- Likens, G.E. Lake Ecosystem Ecology: A Global Perspective; Academic Press: Cambridge, MA, USA, 2010. [Google Scholar]
- Sedell, J.R.; Beschta, R.L. Bringing Back the ’Bio’ in Bioengineering. In Fisheries Bioengineering Symposium: American Fisheries Society Symposium 10; American Fisheries Society: Bethesda, MD, USA, 1991; p. 160. [Google Scholar]
- Johansen, K.; Phinn, S.; Dixon, I.; Douglas, M.; Lowry, J. Comparison of image and rapid field assessments of riparian zone condition in Australian tropical savannas. For. Ecol. Manag. 2007, 240, 42–60. [Google Scholar] [CrossRef]
- Rivenbark, B.L.; Jackson, C.R. Concentrated flow breakthroughs moving through silvicultural streamside management zones: Southeastern piedmont, USA 1. JAWRA J. Am. Water Resour. Assoc. 2004, 40, 1043–1052. [Google Scholar] [CrossRef]
- Werren, G.; Arthington, A. The assessment of riparian vegetation as an indicator of stream condition, with particular emphasis on the rapid assessment of flow-related impacts. In Landscape Health of Queensland; Royal Society of Queenland: Brisbane, Australia, 2002; pp. 194–222. [Google Scholar]
- Fu, B.; Li, Y.; Wang, Y.; Campbell, A.; Zhang, B.; Yin, S.; Zhu, H.; Xing, Z.; Jin, X. Evaluation of riparian condition of Songhua River by integration of remote sensing and field measurements. Sci. Rep. 2017, 7, 2565. [Google Scholar] [CrossRef] [Green Version]
- Congalton, R.G.; Birch, K.; Jones, R.; Schriever, J. Evaluating remotely sensed techniques for mapping riparian vegetation. Comput. Electron. Agric. 2002, 37, 113–126. [Google Scholar] [CrossRef]
- Johansen, K.; Phinn, S. Mapping structural parameters and species composition of riparian vegetation using IKONOS and Landsat ETM+ data in Australian tropical savannahs. Photogramm. Eng. Remote Sens. 2006, 72, 71–80. [Google Scholar] [CrossRef]
- Chaplot, V.; Walter, C.; Curmi, P. Improving soil hydromorphy prediction according to DEM resolution and available pedological data. Geoderma 2000, 97, 405–422. [Google Scholar] [CrossRef]
- Ilhardt, B.L.; Verry, E.S.; Palik, B.J. Defining riparian areas. For. Riparian Zone Orono Maine 2000, 26, 7–14. [Google Scholar]
- Abood, S.A.; Maclean, A.L.; Mason, L.A. Modeling riparian zones utilizing DEMS and flood height data. Photogramm. Eng. Remote Sens. 2012, 78, 259–269. [Google Scholar] [CrossRef]
- Gallant, J.C.; Dowling, T.I. A multiresolution index of valley bottom flatness for mapping depositional areas. Water Resour. Res. 2003, 39. [Google Scholar] [CrossRef]
- Murphy, P.; Ogilvie, J.; Arp, P. Topographic modelling of soil moisture conditions: A comparison and verification of two models. Eur. J. Soil Sci. 2009, 60, 94–109. [Google Scholar] [CrossRef]
- Johansen, K.; Grove, J.; Denham, R.; Phinn, S.R. Assessing stream bank condition using airborne LiDAR and high spatial resolution image data in temperate semirural areas in Victoria, Australia. J. Appl. Remote Sens. 2013, 7, 073492. [Google Scholar] [CrossRef] [Green Version]
- Vaze, J.; Teng, J.; Spencer, G. Impact of DEM accuracy and resolution on topographic indices. Environ. Model. Softw. 2010, 25, 1086–1098. [Google Scholar] [CrossRef]
- Holmes, K.L.; Goebel, P.C.; Morris, A.E. Characteristics of downed wood across headwater riparian ecotones: Integrating the stream with the riparian area. Can. J. For. Res. 2010, 40, 1604–1614. [Google Scholar] [CrossRef]
- Smith, M.P.; Schiff, R.; Olivero, A.; MacBroom, J. The Active River Area: A Conservation Framework for Protecting Rivers and Streams; The Nature Conservancy: Boston, MA, USA, 2008. [Google Scholar]
- Buchanan, B.; Fleming, M.; Schneider, R.; Richards, B.; Archibald, J.; Qiu, Z.; Walter, M. Evaluating topographic wetness indices across central New York agricultural landscapes. Hydrol. Earth Syst. Sci. 2014, 18, 3279–3299. [Google Scholar] [CrossRef] [Green Version]
- Bock, M.; Köthe, R. Predicting the depth of hydromorphic soil characteristics influenced by ground water. SAGA Second. Out 2008, 19, 13–22. [Google Scholar]
- Kokulan, V.; Akinremi, O.; Moulin, A.P.; Kumaragamage, D. Importance of terrain attributes in relation to the spatial distribution of soil properties at the micro scale: A case study. Can. J. Soil Sci. 2018, 98, 292–305. [Google Scholar] [CrossRef] [Green Version]
- Malone, B.P.; Odgers, N.P.; Stockmann, U.; Minasny, B.; McBratney, A.B. Digital mapping of soil classes and continuous soil properties. In Pedometrics; Springer: Berlin/Heidelberg, Germany, 2018; pp. 373–413. [Google Scholar]
- Carrivick, J.L.; Smith, M.W.; Quincey, D.J.; Carver, S.J. Developments in budget remote sensing for the geosciences. Geol. Today 2013, 29, 138–143. [Google Scholar] [CrossRef]
- Villanueva, J.R.E.; Martínez, L.I.; Montiel, J.I.P. DEM generation from fixed-wing UAV imaging and LiDAR-derived ground control points for flood estimations. Sensors 2019, 19, 3205. [Google Scholar] [CrossRef] [Green Version]
- Fonstad, M.A.; Dietrich, J.T.; Courville, B.C.; Jensen, J.L.; Carbonneau, P.E. Topographic structure from motion: A new development in photogrammetric measurement. Earth Surf. Process. Landf. 2013, 38, 421–430. [Google Scholar] [CrossRef] [Green Version]
- Jeziorska, J. UAS for wetland mapping and hydrological modeling. Remote Sens. 2019, 11, 1997. [Google Scholar] [CrossRef] [Green Version]
- Rahman, M.M.; McDermid, G.J.; Strack, M.; Lovitt, J. A new method to map groundwater table in peatlands using unmanned aerial vehicles. Remote Sens. 2017, 9, 1057. [Google Scholar] [CrossRef] [Green Version]
- Shamshiri, R.R.; Hameed, I.A.; Balasundram, S.K.; Ahmad, D.; Weltzien, C.; Yamin, M. Fundamental research on unmanned aerial vehicles to support precision agriculture in oil palm plantations. Agric. Robot. Fundam. Appl. 2018, 6, 91–116. [Google Scholar]
- Kuželka, K.; Surový, P. Mapping forest structure using UAS inside flight capabilities. Sensors 2018, 18, 2245. [Google Scholar] [CrossRef] [Green Version]
- Krisanski, S.; Taskhiri, M.S.; Turner, P. Enhancing methods for under-canopy unmanned aircraft system based photogrammetry in complex forests for tree diameter measurement. Remote Sens. 2020, 12, 1652. [Google Scholar] [CrossRef]
- Rogers, S.R.; Manning, I.; Livingstone, W. Comparing the spatial accuracy of Digital Surface Models from four unoccupied aerial systems: Photogrammetry versus LiDAR. Remote Sens. 2020, 12, 2806. [Google Scholar] [CrossRef]
- White, B.; Ogilvie, J.; Campbell, D.M.; Hiltz, D.; Gauthier, B.; Chisholm, H.K.H.; Wen, H.K.; Murphy, P.N.; Arp, P.A. Using the cartographic depth-to-water index to locate small streams and associated wet areas across landscapes. Can. Water Resour. J. Rev. Can. Ressour. Hydr. 2012, 37, 333–347. [Google Scholar] [CrossRef]
- Elmore, A.J.; Julian, J.P.; Guinn, S.M.; Fitzpatrick, M.C. Potential stream density in Mid-Atlantic US watersheds. PLoS ONE 2013, 8, e74819. [Google Scholar] [CrossRef] [Green Version]
- Wolf, R.; Dewitt, A. Elements of Photogrammetry with Application in GIS, 3rd ed.; The University of Wisconsin: Madison, WI, USA, 2000. [Google Scholar]
- Beni, L.H.; Jones, J.; Thompson, G.; Johnson, C.; Gebrehiwot, A. Challenges and Opportunities for UAV-Based Digital Elevation Model Generation for Flood-Risk Management: A Case of Princeville, North Carolina. Sensors 2018, 18, 3843. [Google Scholar] [CrossRef] [Green Version]
- Poppenga, S.K.; Worstell, B.B.; Stoker, J.M.; Greenlee, S.K. Using Selective Drainage Methods to Extract Continuous Surface Flow from 1-Meter Lidar-Derived Digital Elevation Data; U. S. Geological Survey: Reston, VA, USA, 2010.
- Zhang, W.; Montgomery, D.R. Digital elevation model grid size, landscape representation, and hydrologic simulations. Water Resour. Res. 1994, 30, 1019–1028. [Google Scholar] [CrossRef]
- Hancock, G.R. The use of digital elevation models in the identification and characterization of catchments over different grid scales. Hydrol. Process. Int. J. 2005, 19, 1727–1749. [Google Scholar] [CrossRef]
- O’Callaghan, J.F.; Mark, D.M. The extraction of drainage networks from digital elevation data. Comput. Vis. Graph. Image Process. 1984, 28, 323–344. [Google Scholar] [CrossRef]
- Brander, L.; Schuyt, K. The Economic Values of the World’s Wetlands. 2004. Available online: https://www.cbd.int/financial/values/g-value-wetlands.pdf (accessed on 1 April 2021).
- Wilson, A.M.; Evans, T.; Moore, W.; Schutte, C.A.; Joye, S.B.; Hughes, A.H.; Anderson, J.L. Groundwater controls ecological zonation of salt marsh macrophytes. Ecology 2015, 96, 840–849. [Google Scholar] [CrossRef]
- Londo, G. The decimal scale for releves of permanent quadrats. Vegetatio 1976, 33, 61–64. [Google Scholar] [CrossRef]
- Bouma, J.T. Hydrology and soil genesis of soils with aquic moisture regimes. In Pedogenesis and Soil Taxonomy; Wilding, L.P., Smeck, N.E., Hall, G.F., Eds.; Elsevier: Amsterdam, The Netherlands, 1983. [Google Scholar]
- Jacobs, P.M.; West, L.T.; Shaw, J.N. Redoximorphic features as indicators of seasonal saturation, Lowndes County, Georgia. Soil Sci. Soc. Am. J. 2002, 66, 315–323. [Google Scholar] [CrossRef]
- Congalton, R.G.; Mead, R.A. A quantitative method to test for consistency and correctness in photointerpretation. Photogramm. Eng. Remote Sens. 1983, 49, 69–74. [Google Scholar]
- Fabian, A.J.; Klenke, R.; Truslow, P. Improving UAV-Based Target Geolocation Accuracy through Automatic Camera Parameter Discovery. In AIAA Scitech 2020 Forum; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2020; p. 2201. [Google Scholar]
- Chang, K.-T.; Tsai, B.-W. The effect of DEM resolution on slope and aspect mapping. Cartogr. Geogr. Inf. Syst. 1991, 18, 69–77. [Google Scholar] [CrossRef]
- Thompson, J.A.; Bell, J.C.; Butler, C.A. Digital elevation model resolution: Effects on terrain attribute calculation and quantitative soil-landscape modeling. Geoderma 2001, 100, 67–89. [Google Scholar] [CrossRef]
- Eltner, A.; Kaiser, A.; Castillo, C.; Rock, G.; Neugirg, F.; Abellán, A. Image-based surface reconstruction in geomorphometry–merits, limits and developments. Earth Surf. Dyn. 2016, 4, 359–389. [Google Scholar] [CrossRef] [Green Version]
- Grabs, T.; Seibert, J.; Bishop, K.; Laudon, H. Modeling spatial patterns of saturated areas: A comparison of the topographic wetness index and a dynamic distributed model. J. Hydrol. 2009, 373, 15–23. [Google Scholar] [CrossRef] [Green Version]
- Nobre, A.D.; Cuartas, L.A.; Hodnett, M.; Rennó, C.D.; Rodrigues, G.; Silveira, A.; Saleska, S. Height Above the Nearest Drainage–a hydrologically relevant new terrain model. J. Hydrol. 2011, 404, 13–29. [Google Scholar] [CrossRef] [Green Version]
- Schmid, K.A.; Hadley, B.C.; Wijekoon, N. Vertical accuracy and use of topographic LIDAR data in coastal marshes. J. Coast. Res. 2011, 27, 116–132. [Google Scholar] [CrossRef]
- Sonneveld, M.; Schoorl, J.; Veldkamp, A. Mapping hydrological pathways of phosphorus transfer in apparently homogeneous landscapes using a high-resolution DEM. Geoderma 2006, 133, 32–42. [Google Scholar] [CrossRef]
- Gillin, C.P.; Bailey, S.W.; McGuire, K.J.; Prisley, S.P. Evaluation of LiDAR-derived DEMs through terrain analysis and field comparison. Photogramm. Eng. Remote Sens. 2015, 81, 387–396. [Google Scholar] [CrossRef] [Green Version]
- Sørensen, R.; Seibert, J. Effects of DEM resolution on the calculation of topographical indices: TWI and its components. J. Hydrol. 2007, 347, 79–89. [Google Scholar] [CrossRef]
- Wolock, D.M.; Price, C.V. Effects of digital elevation model map scale and data resolution on a topography-based watershed model. Water Resour. Res. 1994, 30, 3041–3052. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| DEM | Interpolation | F. I. (ha) | VDTCN Threshold (m) | Overall Accuracy (%) | Kappa Coefficient |
|---|---|---|---|---|---|
| Coarse | 2 m | 1.5 | 14.2 | 75 | 0.25 |
| LiDAR 1.2 | 30 cm | 1.5 | 14.2 | 27 | 0.04 |
| LiDAR 6.0 | 30 cm | 1.5 | 14.2 | 26 | 0.03 |
| UAV | 30 cm | 1.5 | 14.2 | 26 | 0.03 |
| LiDAR 1.2 | 30 cm | 0.75 | 0.40 | 88 | 0.63 |
| LiDAR 6.0 | 30 cm | 0.75 | 0.40 | 89 | 0.63 |
| UAV | 30 cm | 0.75 | 0.40 | 88 | 0.56 |
| LiDAR 6.0 | 30 cm | 0.75 | 0.48 | 88 | 0.64 |
| UAV | 30 cm | 0.75 | 0.48 | 87 | 0.59 |
| UAV | 30 cm | 0.5 | 0.48 | 88 | 0.63 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Grau, J.; Liang, K.; Ogilvie, J.; Arp, P.; Li, S.; Robertson, B.; Meng, F.-R. Improved Accuracy of Riparian Zone Mapping Using Near Ground Unmanned Aerial Vehicle and Photogrammetry Method. Remote Sens. 2021, 13, 1997. https://doi.org/10.3390/rs13101997
Grau J, Liang K, Ogilvie J, Arp P, Li S, Robertson B, Meng F-R. Improved Accuracy of Riparian Zone Mapping Using Near Ground Unmanned Aerial Vehicle and Photogrammetry Method. Remote Sensing. 2021; 13(10):1997. https://doi.org/10.3390/rs13101997
Chicago/Turabian StyleGrau, Joan, Kang Liang, Jae Ogilvie, Paul Arp, Sheng Li, Bonnie Robertson, and Fan-Rui Meng. 2021. "Improved Accuracy of Riparian Zone Mapping Using Near Ground Unmanned Aerial Vehicle and Photogrammetry Method" Remote Sensing 13, no. 10: 1997. https://doi.org/10.3390/rs13101997