
A Novel Phonology- and Radical-Coded Chinese Sign Language Recognition Framework Using Accelerometer and Surface Electromyography Sensors

Abstract
:1. Introduction





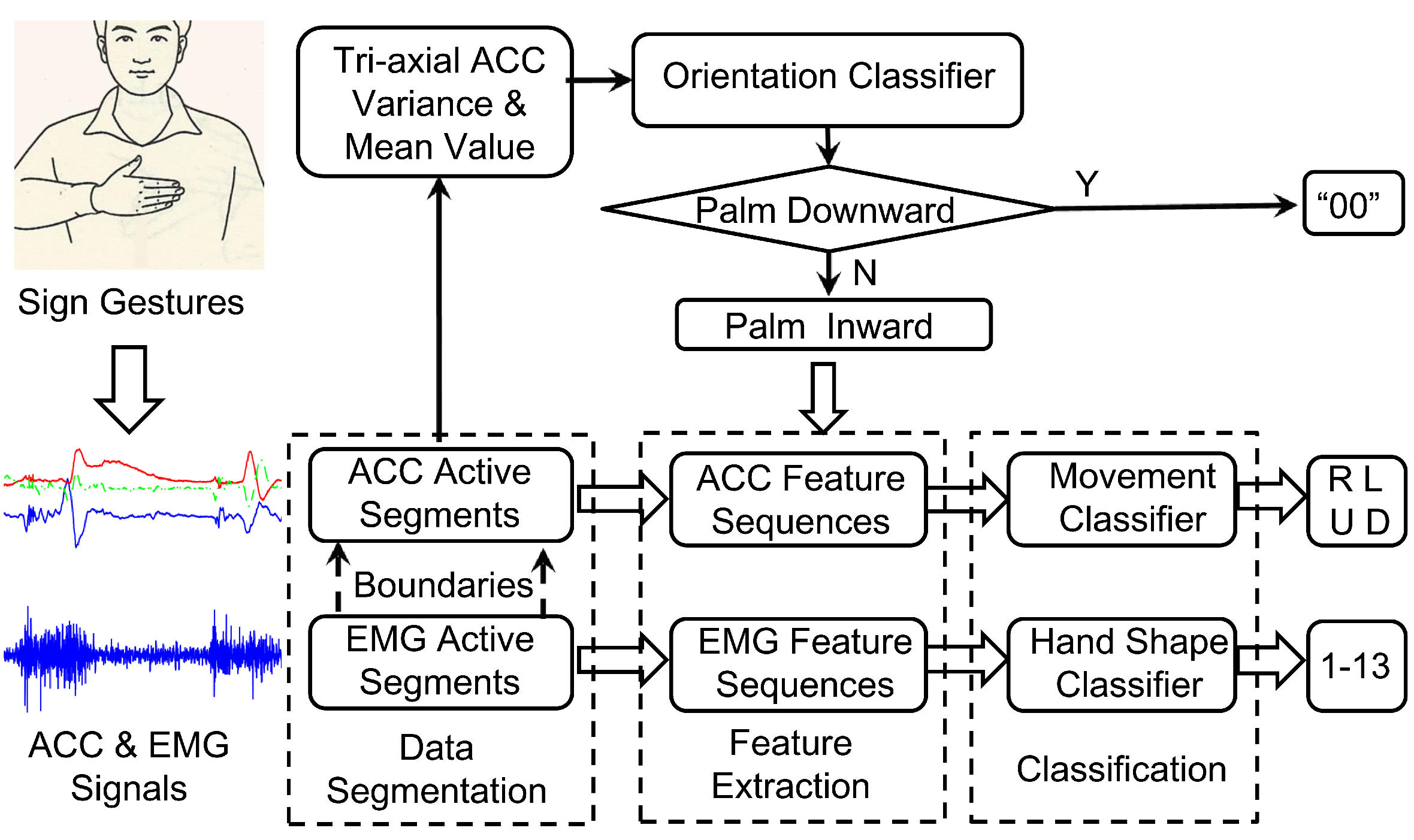
2. Methods

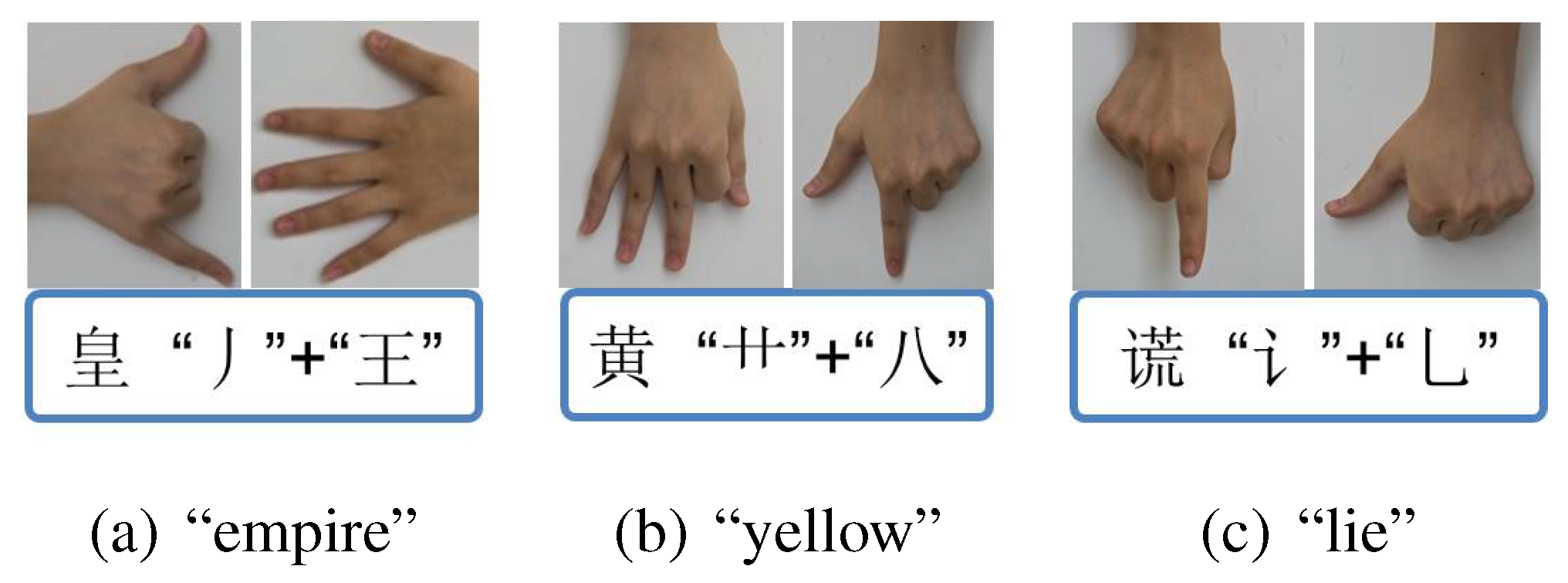
2.1. Sign Gesture Definition & Data Acquisition


2.2. Data Segmentation

2.3. Component-Level Classification
2.3.1. Hand Orientation Classifier
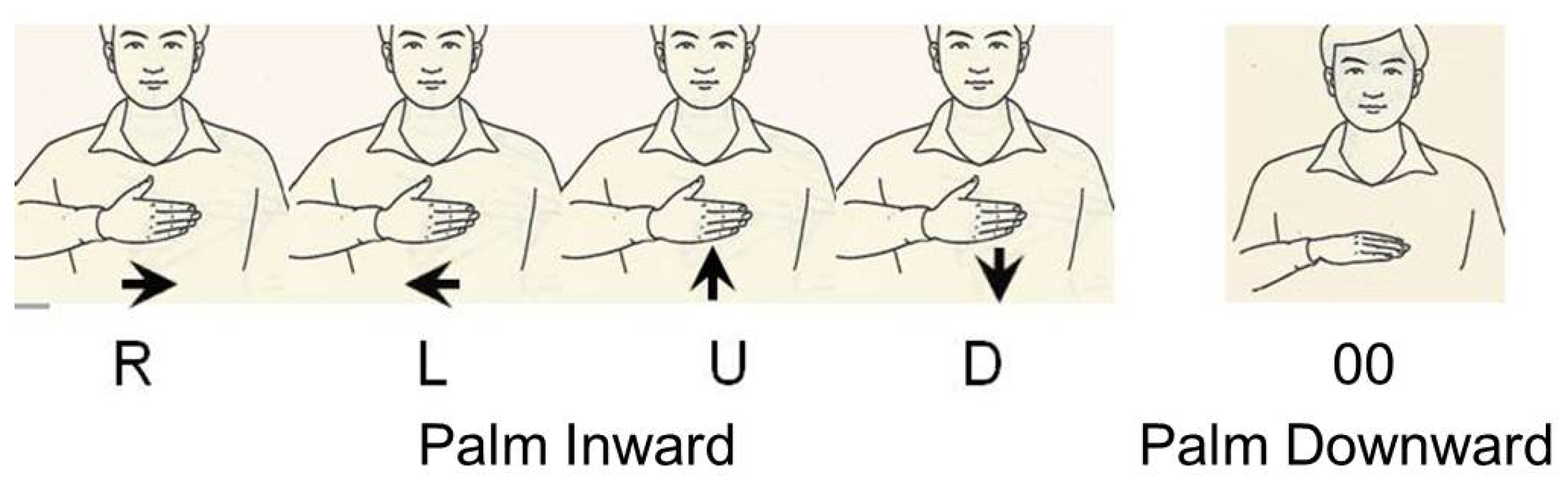
2.3.2. Hand Movement Classifier

2.3.3. Hand Shape Classifier
3. Experiments
Data Set Construction

4. Results
4.1. CSL Coded Gesture Classification Results
4.1.1. Palm Orientation Classification Results
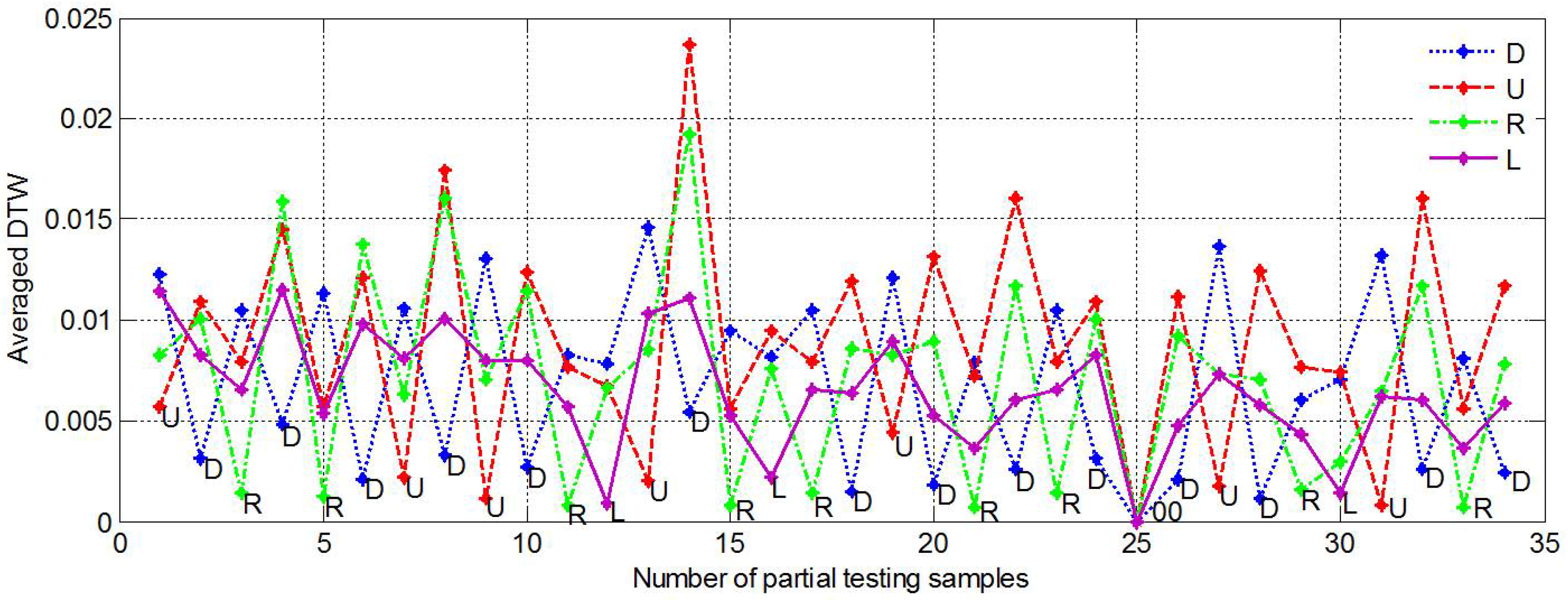
4.1.2. Hand Movement Classification Results

4.1.3. Hand Shape Classification Results

4.2. Continuous Chinese Character Classification Results

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Subjects | Real Number | Identified Number | Accuracies (%) | |||
|---|---|---|---|---|---|---|
| Gestures | Characters | Gestures | Characters | Gestures | Characters | |
| S1 | 446 | 223 | 433 | 210 | 97.09 | 94.17 |
| S2 | 446 | 223 | 430 | 208 | 96.41 | 93.72 |
| S3 | 446 | 223 | 428 | 205 | 95.96 | 91.93 |
| S4 | 446 | 223 | 427 | 204 | 95.74 | 93.27 |
| S5 | 446 | 223 | 423 | 202 | 94.84 | 90.58 |
| Overall | 2230 | 1115 | 2141 | 1029 | 96.01 | 92.73 |
5. Discussions and Conclusions
| Author | Sensor Types | Language | Isolated/ | Basic Units | Vocabulary | Accuracy (%) |
|---|---|---|---|---|---|---|
| per Hand | Continuous | |||||
| Fang [37] | 1 CyberGloves | Chinese SL | Continuous | Phonemes | 5113 Phonemes | 91.9 |
| 3D tracker | ||||||
| Losmidou [16] | 1 3-axis ACC | Greek SL | Isolated | Word | 60 words | >93 |
| 5 bipolar EMG | ||||||
| Zhang [40] | 1 3-axis ACC | Chinese SL | Continuous | Word | 72 words | >95 |
| 5 bipolar EMG | 40 sentences | 72.5 | ||||
| Li [21] | 1 3-axis ACC | Chinese SL | Continuous | Component | 121 subwords | 96.5 |
| 4 bipolar EMG | 200 sentences | 86.7 | ||||
| The proposed | 1 3-axis ACC | Chinese SL | Continuous | Phonology | 53 basic units | >95 |
| 4 bipolar EMG | & Component | 223 characters | >92 |
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Ong, S.C.W.; Ranganath, S. Automatic sign language analysis: A survey and the future beyond lexical meaning. IEEE Trans. Pattern Anal. Mach. Intell. 2005, 27, 873–891. [Google Scholar] [CrossRef] [PubMed]
- Kong, W.W.; Ranganath, S. Towards subject independent continuous sign language recognition: A segment and merge approach. Pattern Recognit. 2014, 47, 1294–1308. [Google Scholar] [CrossRef]
- Fagiani, S.S.M.; Principi, E.; Piazza, F. Signer independent isolated Italian sign recognition based on hidden Markov models. Pattern Anal. Appl. 2015, 18, 385–402. [Google Scholar] [CrossRef]
- Regina, E.; Chuan, C.; Guardino, C. American sign language recognition using leap motion sensor. In Proceedings of the 13th International Conference on Machine Learning and Applications (ICMLA), Detroit, MI, USA, 3–5 December 2014; pp. 541–544.
- Ding, L.; Martinez, A.M. Modelling and recognition of the linguistic components in American sign language. Image Vis. Comput. 2009, 27, 1826–1844. [Google Scholar] [CrossRef] [PubMed]
- Oz, C.; Leu, M.C. American sign language word recognition with a sensory glove using artificial neural networks. Eng. Appl. Artif. Intell. 2011, 24, 1204–1213. [Google Scholar] [CrossRef]
- Starner, T.; Pentland, A. Real-time American sign language recognition from video using hidden Markov models. In Proceedings of the International Symposium on Computer Vision, Coral Gables, FL, USA, 19–21 November 1995; pp. 265–270.
- Weaver, J.; Starner, T.; Pentland, A. Real-time American sign language recognition using desk and wearable computer based video. IEEE Trans. Pattern Anal. Mach. Intell. 1998, 20, 1371–1375. [Google Scholar]
- Vogler, C.; Metaxes, D. A framework for recognizing the simultaneous aspects of American sign language. Comput. Vis. Image Underst. 2001, 81, 358–384. [Google Scholar] [CrossRef]
- Vogler, C.; Goldenstein, S. Facial movement analysis in ASL. Univers. Access Inf. Soc. 2008, 6, 363–374. [Google Scholar] [CrossRef]
- Deriche, M.; Mohandes, M.; Liu, J. Image-based and sensor-based approaches to Arabic sign language recognition. IEEE Trans. Hum. Mach. Syst. 2014, 44, 551–557. [Google Scholar]
- Fanaswala, M.; Amin, F.; Assaleh, K.; Shanableh, T.; Bajaj, H. Continuous Arabic sign language recognition in user dependent mode. J. Intell. Learn. Syst. Appl. 2010, 2, 19–27. [Google Scholar]
- Assaleh, K.; Shanableh, T.; Al-Rousan, M. Spatio-temporal feature-extraction techniques for isolated gesture recognition in Arabic sign language. IEEE Trans. Syst. Man Cybern. Part B Cybern. 2007, 37, 641–650. [Google Scholar]
- Kosmidou, V.E.; Hadjileontiadis, L.J. Intrinsic mode entropy: An enhanced classification means for automated Greek sign language gesture recognition. In Proceedings of the 30th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Vancouver, BC, USA, 20–25 August 2008; pp. 5057–5060.
- Kosmidou, V.E.; Hadjileontiadis, L.J. Sign language recognition using intrinsic-mode sample entropy on sEMG and accelerometer data. IEEE Trans. Biomed. Eng. 2009, 56, 2879–2890. [Google Scholar] [CrossRef] [PubMed]
- Petrantonakis, P.C.; Kosmidou, V.E.; Hadjileontiadis, L.J. Enhanced sign language recognition using weighted intrinsic-mode entropy and signer’s level of deafness. IEEE Trans. Syst. Man Cybern. Part B Cybern. 2011, 41, 1531–1543. [Google Scholar]
- Kim, J.S.; Jang, W.; Bien, Z. A dynamic gesture recognition system for the Korean sign language (KSL). IEEE Trans. Syst. Man Cybern. Part B Cybern. 1996, 26, 354–359. [Google Scholar]
- Park, G.; Jang, W.; Kim, J.; Lee, C.; Bien, Z.; Kim, S. Real-time recognition system of Korean sign language based on elementary components. In Proceedings of the Sixth IEEE International Conference on Fuzzy Systems, Barcelona, Spain, 1–5 July 1997; Volume 3, pp. 1463–1468.
- Bang, W.; Kim, J.; Park, K.; Bien, Z.Z. Continuous gesture recognition system for Korean sign language based on fuzzy logic and hidden Markov model. In Proceedings of the 2002 IEEE International Conference on Fuzzy Systems, Honolulu, HI, USA, 12–17 May 2002.
- Wang, C.; Gao, W.; Shan, S. An approach based on phonemes to large vocabulary Chinese sign language recognition. In Proceedings of Fifth IEEE International Conference on Automatic Face Gesture Recognition, Washington, DC, USA, 21–21 May 2002.
- Zhang, X.; Wang, K.; Li, Y.; Chen, X.; Wang, Z.J. A sign-component-based framework for Chinese sign language recognition using accelerometer and sEMG data. IEEE Trans. Biomed. Eng. 2012, 59, 2695–2704. [Google Scholar]
- Wang, C.; Kong, D.; Wang, R.; Yin, B. Similarity assessment model for Chinese sign language videos. IEEE Trans. Multimed. 2014, 16, 751–761. [Google Scholar] [CrossRef]
- China Disabled Persons’ Federation. The Number of Persons with Disabilities in the End of 2010. Available online: http://www.cdpf.org.cn/sjzx/cjrgk/201206/t20120626_387581.shtml (accessed on 4 May 2015).
- China Association of the Deaf. Chinese Sign Language (Revised Edition); Hua Xia Press: Beijing, China, 2003. (In Chinese) [Google Scholar]
- Katsamanis, A.; Theodorakis, S.; Maragos, P. Product-HMMs for automatic sign language recognition. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing, Taipei, Taiwan, 19–24 April 2009; pp. 1601–1604.
- Fang, G.; Gao, W. A SRN/HMM system for signer-independent continuous sign language recognition. In Proceedings of the Fifth IEEE International Conference on Automatic Face and Gesture Recognition, Washington, DC, USA, 21–21 May 2002; pp. 312–317.
- Zhang, T.; Sun, C.; Xu, C. Latent support vector machine modeling for sign language recognition with Kinect. Acm Trans. Intell. Syst. Technol. 2015, 6. [Google Scholar] [CrossRef]
- Tang, A.; Huang, J.; Lu, K.; Wang, Y.F.; Li, H. A real-time hand posture recognition system using deep neural networks. Acm Trans. Intell. Syst. Technol. 2015, 6. [Google Scholar] [CrossRef]
- China Disabled Persons’ Federation. Graphic Book of Phonology- and Radical-Coded Getures. Available online: http://club.china.com/data/thread/1011/2717/35/28/5_1.html (accessed on 5 April 2015).
- Silanon, K.; Suvonvorn, N. Finger-spelling recognition system using fuzzy finger shape and hand appearance features. In Proceedings of the Fourth International Conference on Digital Information and Communication Technology and It’s Applications (DICTAP), Bangkok, Thailand, 6–8 May 2014; pp. 419–424.
- Dahmani, D.; Larabi, S. User-independent system for sign language finger spelling recognition. J. Vis. Commun. Image Represent. 2014, 25, 1240–1250. [Google Scholar] [CrossRef]
- Asselin, P.K.; Allen, J.M.; Foulds, R. American sign language finger spelling recognition system. In Proceedings of the IEEE 29th Annual Bioengineering Conference, Newark, NJ, USA, 22–23 March 2003; pp. 285–286.
- Grobel, K.; Assan, M. Isolated sign language recognition using hidden Markov models. In Proceedings of the IEEE International Conference on Systems, Man, and Cybernetics, Computational Cybernetics and Simulation, Orlando, FL, USA, 12–15 October 1997; Volume 1, pp. 162–167.
- Shanableh, T.; Tubaiz, N.; Assaleh, K. Glove-based continuous Arabic sign language recognition in user-dependent mode. IEEE Trans. Hum. Mach. Syst. 2015, 45, 526–533. [Google Scholar]
- Fang, G.; Gao, W.; Zhao, D. Large vocabulary sign language recognition based on fuzzy decision trees. IEEE Trans. Syst. Man Cybern. Part A Syst. Hum. 2004, 34, 305–314. [Google Scholar] [CrossRef]
- Sarkar, S.; Yang, R.; Loeding, B. Handling movement epenthesis and hand segmentation ambiguities in continuous sign language recognition using nested dynamic programming. IEEE Trans. Pattern Anal. Mach. Intell. 2010, 32, 462–477. [Google Scholar]
- Fang, G.; Gao, W.; Zhao, D. Large-vocabulary continuous sign language recognition based on transition-movement models. IEEE Trans. Syst. Man Cybern. Part A Syst. Hum. 2007, 37, 1–9. [Google Scholar] [CrossRef]
- McDonald, J.; Kell, D.; Markham, C. Weakly supervised training of a sign language recognition system using multiple instance learning density matrices. IEEE Trans. Syst. Man Cybern. Part B Cybern. 2011, 41, 526–541. [Google Scholar]
- Roy, S.H.; Moore, J.; de Luca, G.; Nawab, S.H.; de Luca, C.J.; Cheng, M.S.; Chang, S. A combined sEMG and accelerometer system for monitoring functional activity in stroke. IEEE Trans. Neural Syst. Rehabil. Eng. 2009, 17, 585–594. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Lantz, V.; Wang, K.; Zhang, X.; Chen, X.; Yang, J. A framework for hand gesture recognition based on accelerometer and EMG sensors. IEEE Trans. Syst. Man Cybern. Part A Syst. Hum. 2011, 41, 1064–1076. [Google Scholar]
- Morris, D.; Saponas, T.S.; Tan, D.S.; Balakrishnan, R. Demonstrating the Feasibility of Using Forearm Electromyography for Muscle-Computer Interfaces. In Proceedings of the SIGCHI Conference on Human Factors in Computing Systems, Boston, MA, USA, 15–17 March 2008; pp. 515–524.
- Liang, R.H.; Ouhyoung, M. A real-time continuous gesture recognition system for sign language. In Proceedings of the International Conference Automatic Face and Gesture Recognition, Nara, Japan, 14–16 April 1998; pp. 558–565.
- Zhou, P.; Li, X.; Aruin, A.S. Teager-kaiser energy operation of surface EMG improves muscle activity onset detection. Ann. Biomed. Eng. 2007, 35, 1532–1538. [Google Scholar]
- Zhang, X.; Zhou, P. Sample entropy analysis of surface EMG for improved muscle activity onset detection against spurious background spikes. J. Electromyogr. Kinesiol. 2012, 22, 901–907. [Google Scholar] [CrossRef] [PubMed]
- Xu, Q.; Quan, Y.; Yang, L.; He, J. An adaptive algorithm for the determination of the onset and offset of muscle contraction by emg signal processing. IEEE Trans. Neural Syst. Rehabil. Eng. 2013, 21, 65–73. [Google Scholar] [CrossRef] [PubMed]
- Ying, D.; Liu, J.; Rymer, W.Z. EMG burst presence probability: A joint time-frequency representation of muscle activity and its application to onset detection. J. Biomech. 2015, 48, 1193–1197. [Google Scholar]
- Cheng, J.; Chen, X.; Lu, Z. Key-press gestures recognition and interaction based on sEMG signals. In Proceedings of the 1st International Conference on Multimodal Interfaces and the Workshop on Machine Learning for Multimodal Interaction, ICMI-MLMI 2010, Beijing, China, 8–12 November 2010.
- Chen, X.; Wang, Z.J. Pattern recognition of number gestures based on a wireless surface EMG system. Biomed. Signal Proc. Control 2013, 8, 184–192. [Google Scholar] [CrossRef]
- Oskoei, M.A.; Hu, H. Myoelectric control systems: A survey. Biomed. Signal Proc. Control 2007, 2, 275–294. [Google Scholar] [CrossRef]
- Liu, C.; Wechsler, H. Robust coding schemes for indexing and retrieval from large face databases. IEEE Trans. Image Proc. Publ. IEEE Signal Proc. Soc. 2000, 9, 132–137. [Google Scholar]
- Xu, P.; Sun, Q.; Liu, R.; Jiang, L. Dynamic-time-warping-based measurement data alignment model for condition-based railroad track maintenance. IEEE Trans. Intell. Transp. Syst. 2015, 16, 799–812. [Google Scholar] [CrossRef]
- Deng, J.J.; Leung, C.H.C. Dynamic time warping for music retrieval using time series modeling of musical emotions. IEEE Trans. Affect. Comput. 2015, 6, 137–151. [Google Scholar] [CrossRef]
- Salvador, S.; Chan, P. Toward accurate dynamic time warping in linear time and space. Intell. Data Anal. 2007, 11, 561–580. [Google Scholar]
- Coelho, A.L.V.; Lima, C.A.M. Assessing fractal dimension methods as feature extractors for EMG signal classification. Eng. Appl. Artif. Intell. 2014, 36, 81–98. [Google Scholar] [CrossRef]
- Chen, J.J.; Shiavi, R. Temporal feature extraction and clustering analysis of electromyographic linear envelopes in gait studies. IEEE Trans. Bio-Med. Eng. 1990, 37, 295–302. [Google Scholar] [CrossRef] [PubMed]
- Parker, P.A.; Englehart, K.; Hudgins, B.; Stevenson, M. Classification of the myoelectric signal using time-frequency based representations. Med. Eng. Phys. 1999, 21, 431–438. [Google Scholar]
- Kuzborskij, I.; Elsig, S.; Mittaz, H.A.G.; Deriaz, O.; Castellini, C.; Muller, H.; Atzori, M.; Gijsberts, A.; Caputo, B. Characterization of a benchmark database for myoelectric movement classification. IEEE Trans. Neural Syst. Rehabil. Eng. 2015, 23, 73–83. [Google Scholar]
- Rabiner, L. A tutorial on hidden Markov models and selected applications in speech recognition. Proc. IEEE 1989, 77, 257–286. [Google Scholar] [CrossRef]
- Lee, K.S. EMG-based speech recognition using hidden Markov models with global control variables. IEEE Trans. Biomed. Eng. 2008, 55, 930–940. [Google Scholar] [CrossRef] [PubMed]
- Chan, A.D.C.; Englehart, K.B. Continuous myoelectric control for powered prostheses using hidden Markov models. IEEE Trans. Biomed. Eng. 2005, 52, 121–124. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Zhang, X.; Zhao, Z. A hybrid speech recognition training method for HMM based on genetic algorithm and Baum Welch algorithm. In Proceedings of the Second International Conference on Innovative Computing, Information and Control, Kumamoto, Japan, 5–7 September 2007; p. 572.
- Wickramasuriya, J.; Liu, J.; Zhong, L.; Vasudevan, V. uWave: Accelerometer-based personalized gesture recognition and its applications. Pervasive Mob. Comput. 2009, 5, 657–675. [Google Scholar]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cheng, J.; Chen, X.; Liu, A.; Peng, H. A Novel Phonology- and Radical-Coded Chinese Sign Language Recognition Framework Using Accelerometer and Surface Electromyography Sensors. Sensors 2015, 15, 23303-23324. https://doi.org/10.3390/s150923303
Cheng J, Chen X, Liu A, Peng H. A Novel Phonology- and Radical-Coded Chinese Sign Language Recognition Framework Using Accelerometer and Surface Electromyography Sensors. Sensors. 2015; 15(9):23303-23324. https://doi.org/10.3390/s150923303
Chicago/Turabian StyleCheng, Juan, Xun Chen, Aiping Liu, and Hu Peng. 2015. "A Novel Phonology- and Radical-Coded Chinese Sign Language Recognition Framework Using Accelerometer and Surface Electromyography Sensors" Sensors 15, no. 9: 23303-23324. https://doi.org/10.3390/s150923303