
Cluster-Based Maximum Consensus Time Synchronization for Industrial Wireless Sensor Networks †

Abstract
:1. Introduction
- (1)
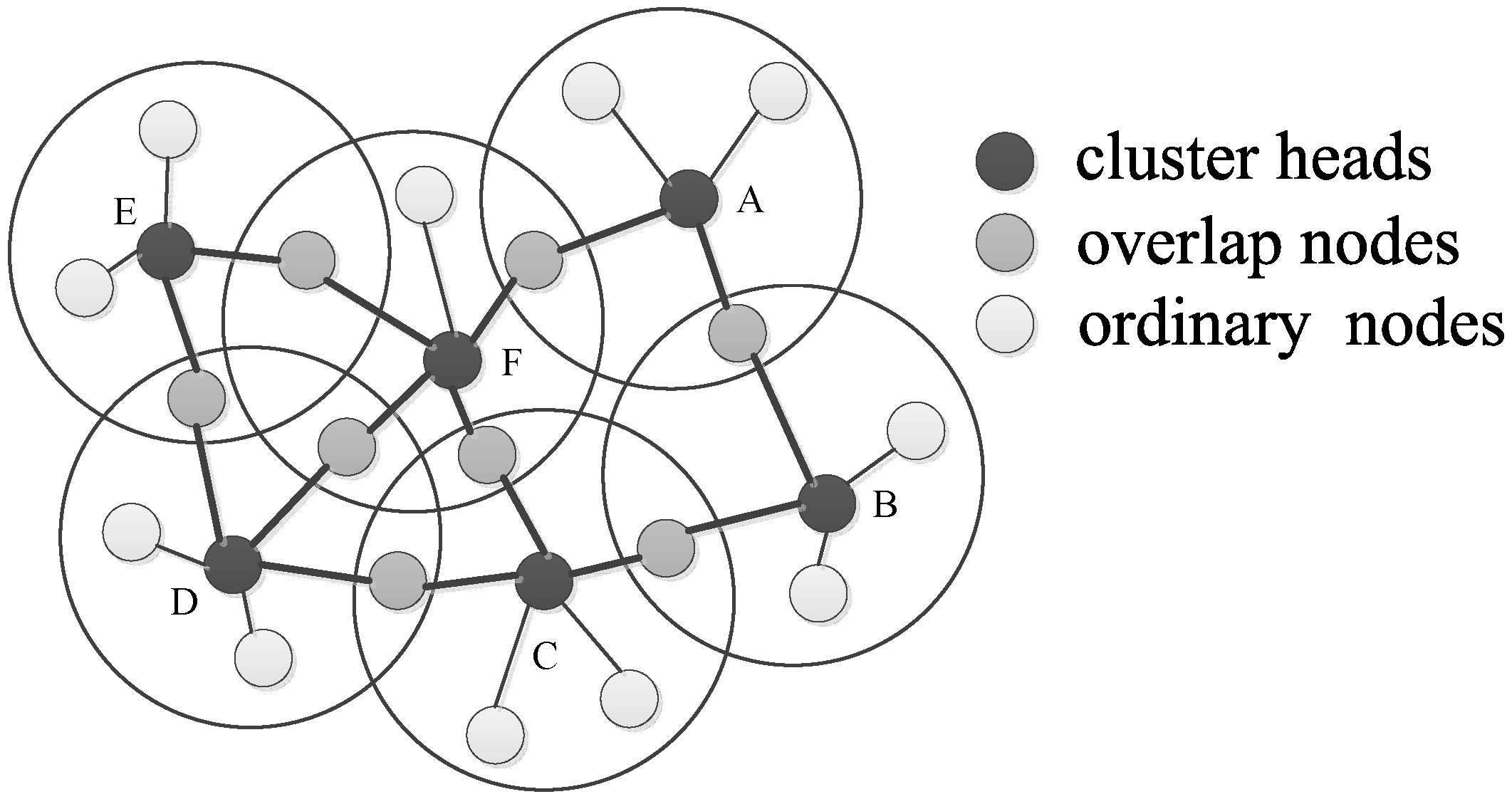
- We first ignore the communication delays and propose a novel Cluster-based Maximum consensus Time Synchronization (CMTS) method in combination with the characteristics of max-consistency theory and overlapping cluster network structure.
- (2)
- (3)
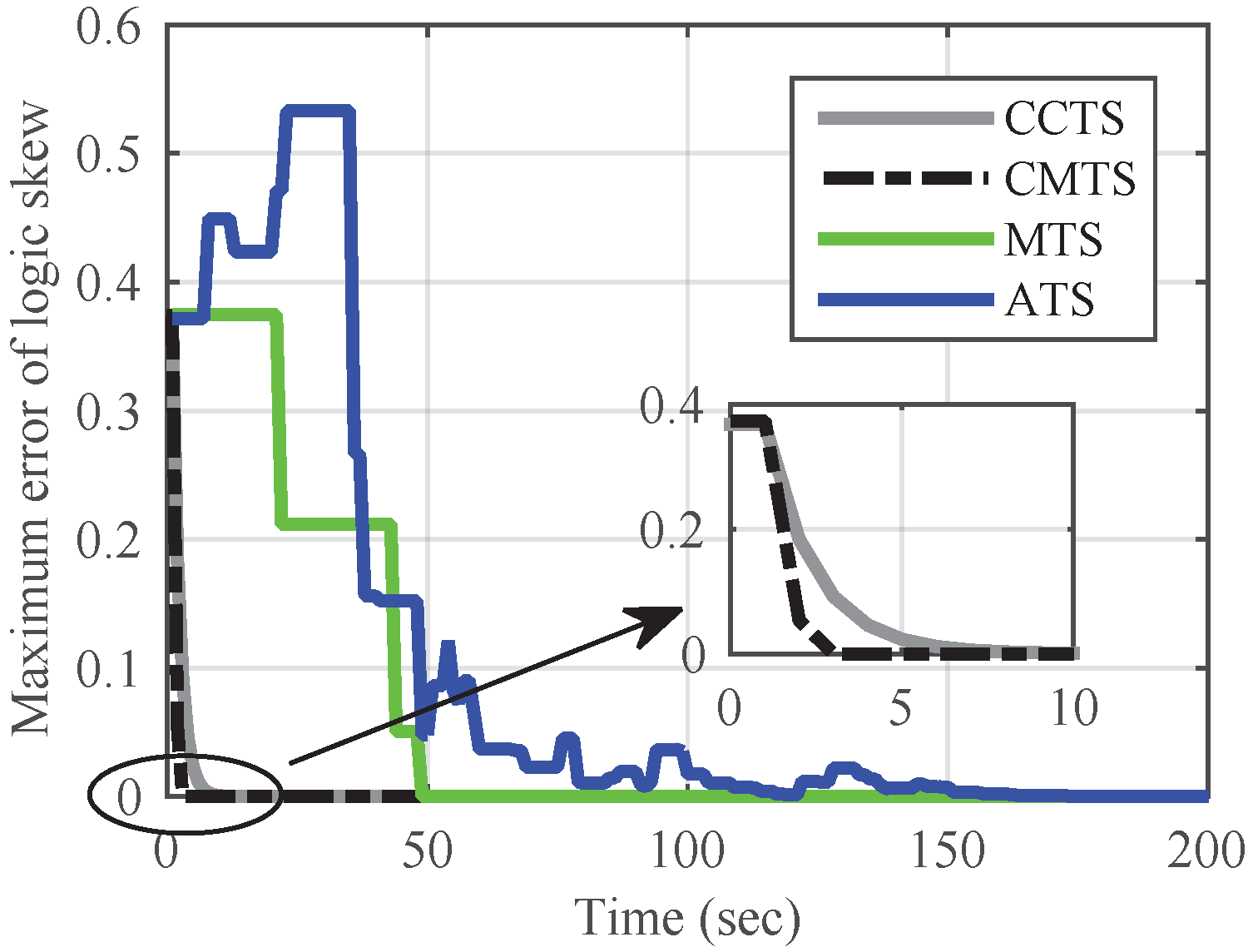
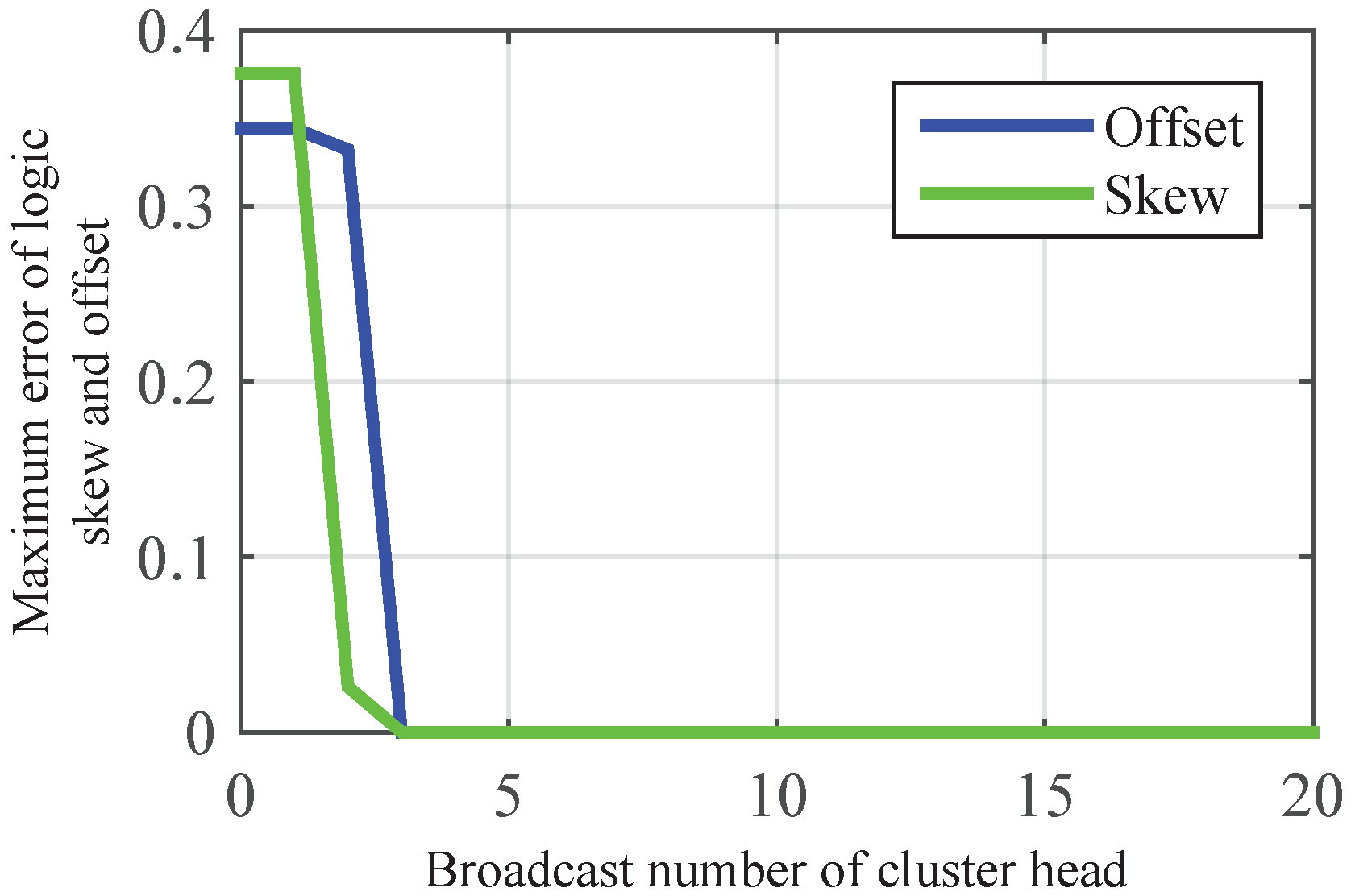
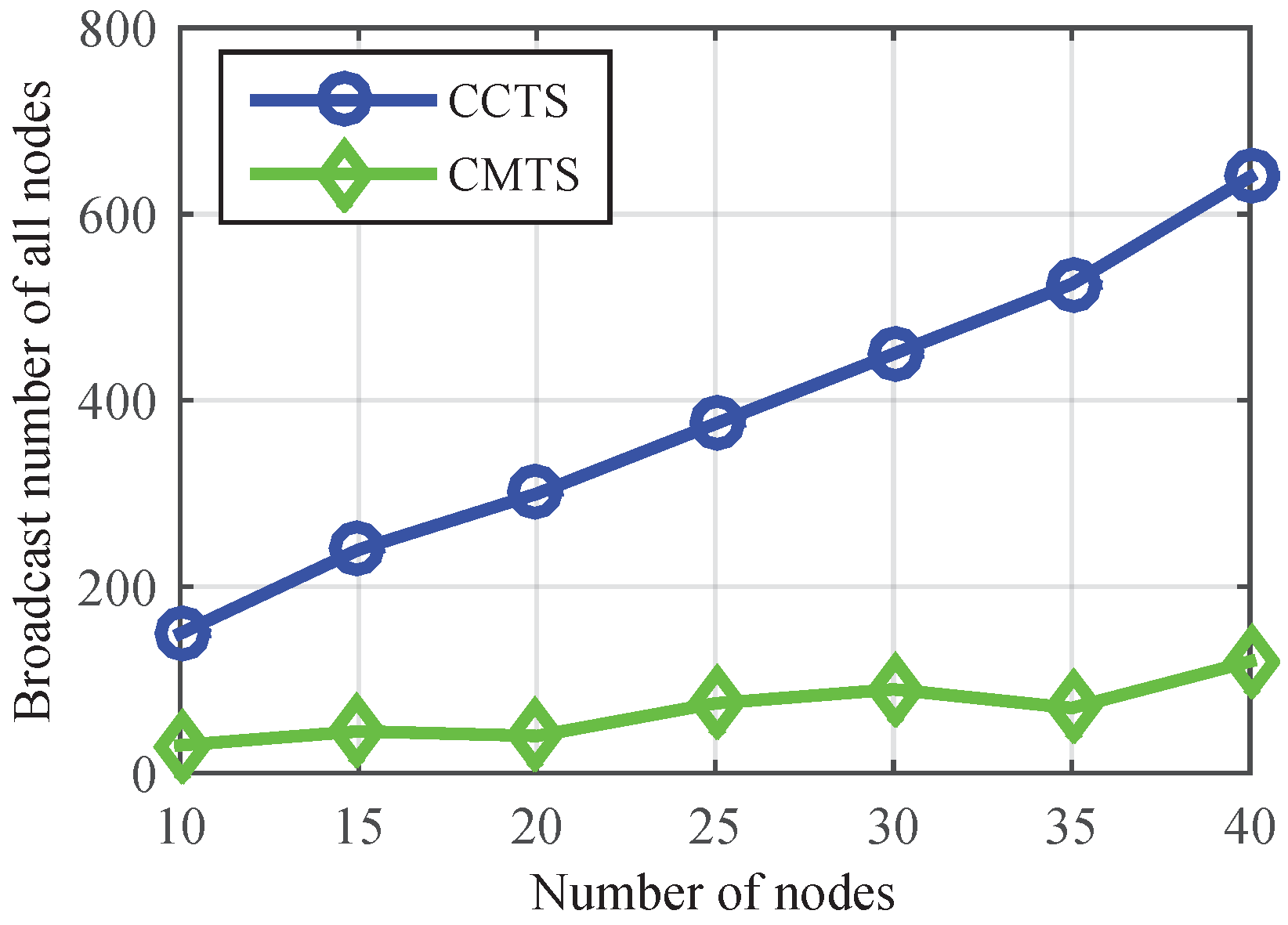
- The performance analysis and simulation results demonstrate that our protocol could effectively reduce the communication overhead, speed up the convergence time, and improve the synchronization precision. Additionally, CMTS needs at most three times send-receive process to achieve intra-cluster synchronization, with linear time to achieve inter-cluster synchronization. The convergence time of Revised-CMTS heavily depends on the probability that the lower bound and upper bound of communication delays appear successively; namely, a higher probability generates a faster convergence speed.
2. Related Work
3. Clock Model
4. CMTS and Revised-CMTS Methods
4.1. CMTS Method
| Algorithm 1 CMTS algorithm |
| (1). In clustered IWSNs, set and for each node, and set the sync interval T for cluster heads. (2). For cluster head h, if , , node h broadcasts < , , > to its cluster members. Upon receiving the time information from cluster head, cluster member i records current information < , , >, and sends it back to cluster head h. (3). When node l—which can be the cluster head or cluster member—receives time information from cluster member or cluster head j, and has a historical record < , , >, then compute Caes1: if , then Case2: if , then Case3: if , then continue with step 4. (4). Node l store the latest time information(, ). |
4.2. Revised-CMTS Method
| Algorithm 2 Revised-CMTS |
| (1). When cluster head i has received two consecutive sync packets from cluster member j, it calculates the reciprocal of revised relative clock skew and updates its clock skew and offset compensation parameters as follows: (2). When cluster member j receives sync packets from cluster head i, it updates its clock skew and offset compensation parameters as follows: |
5. Performance Analysis and Simulation Results
5.1. Performance Analysis
5.1.1. Analysis of CMTS
5.1.2. Analysis of Revised-CMTS
5.2. Simulation Results
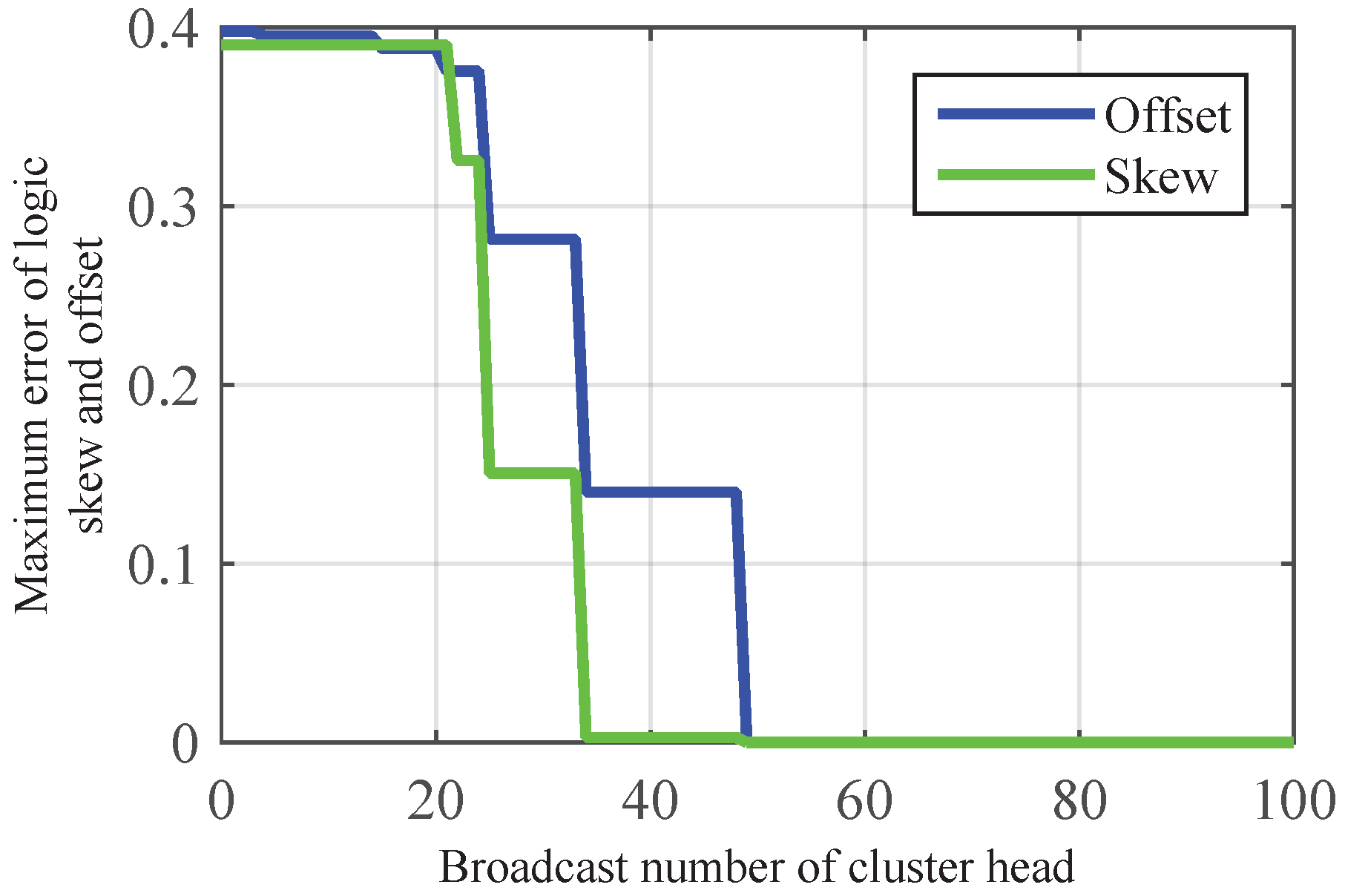
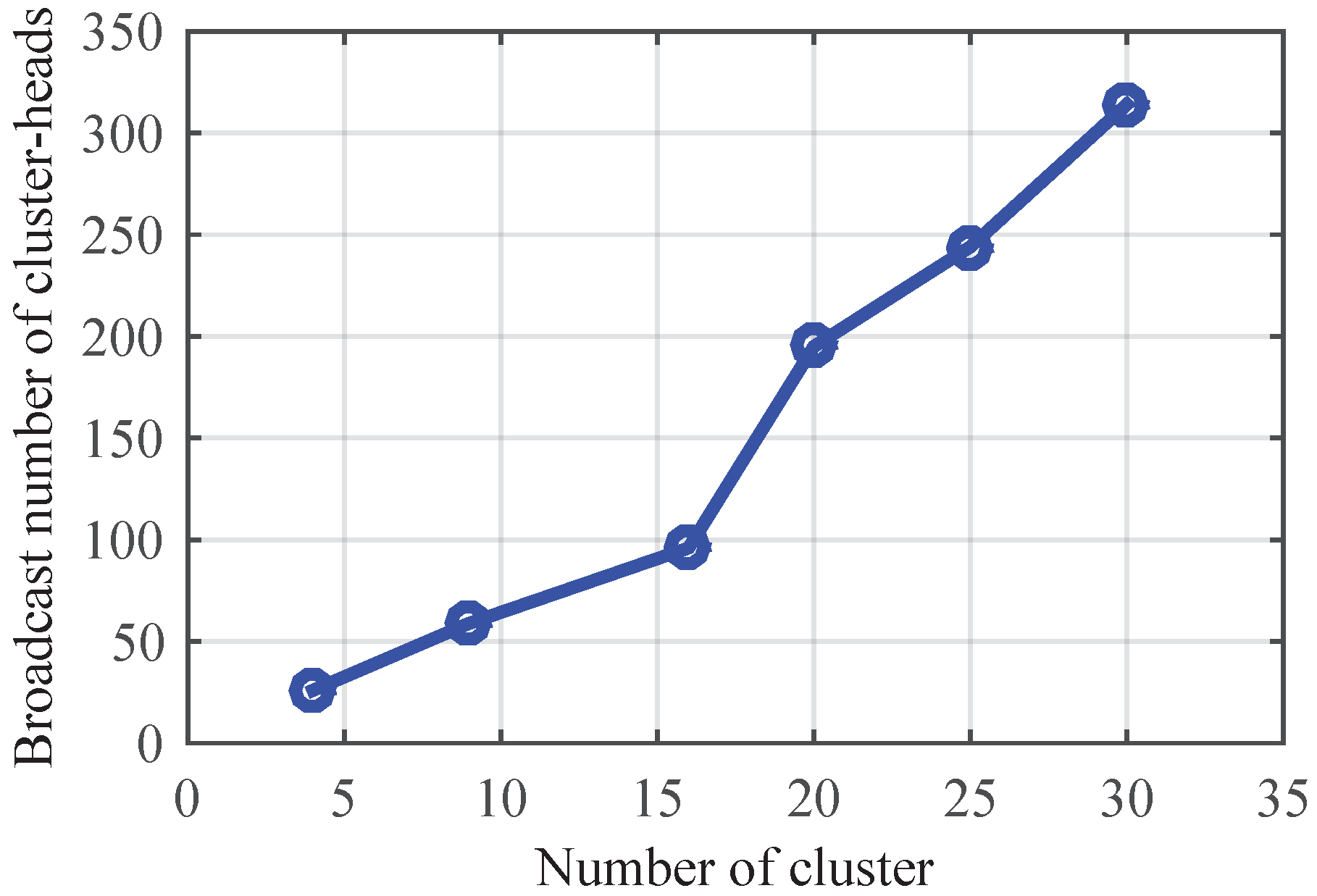
5.2.1. Without Communication Delays
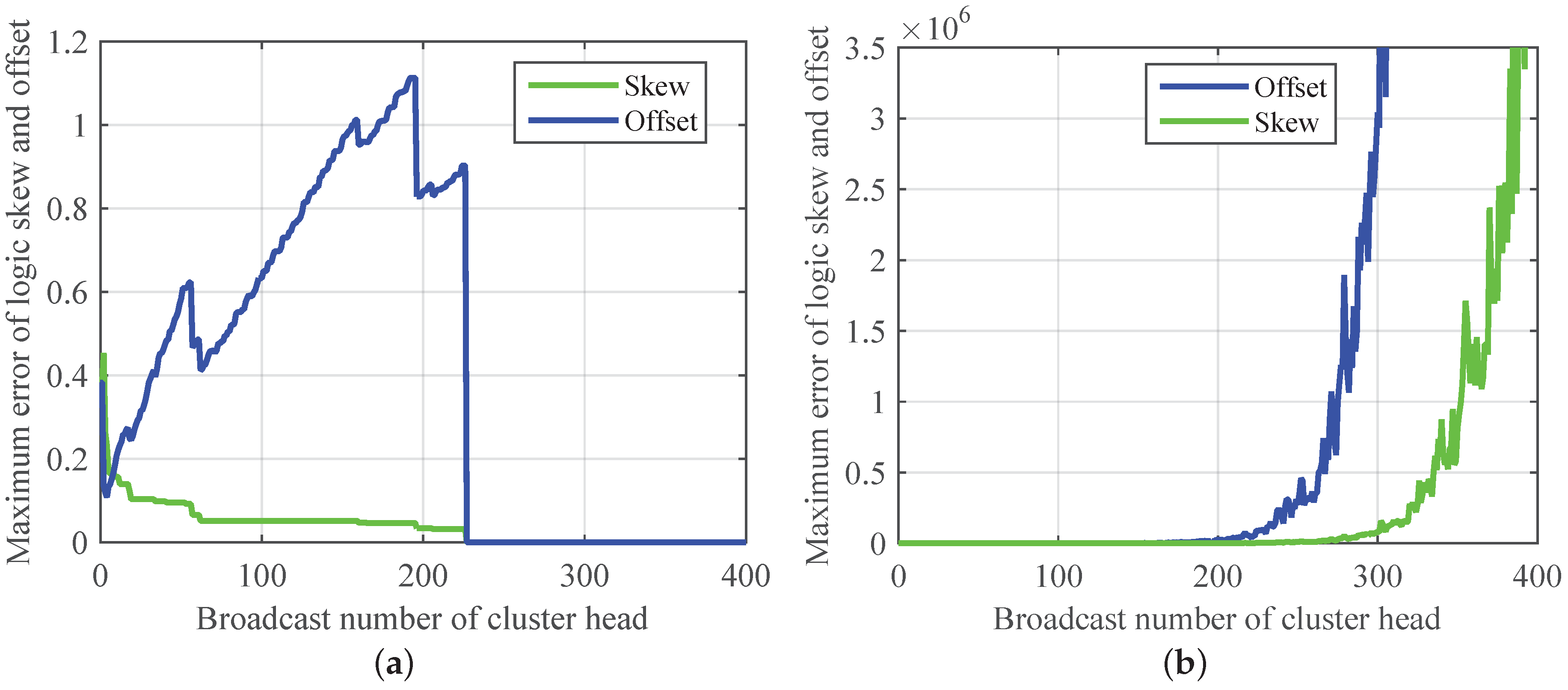
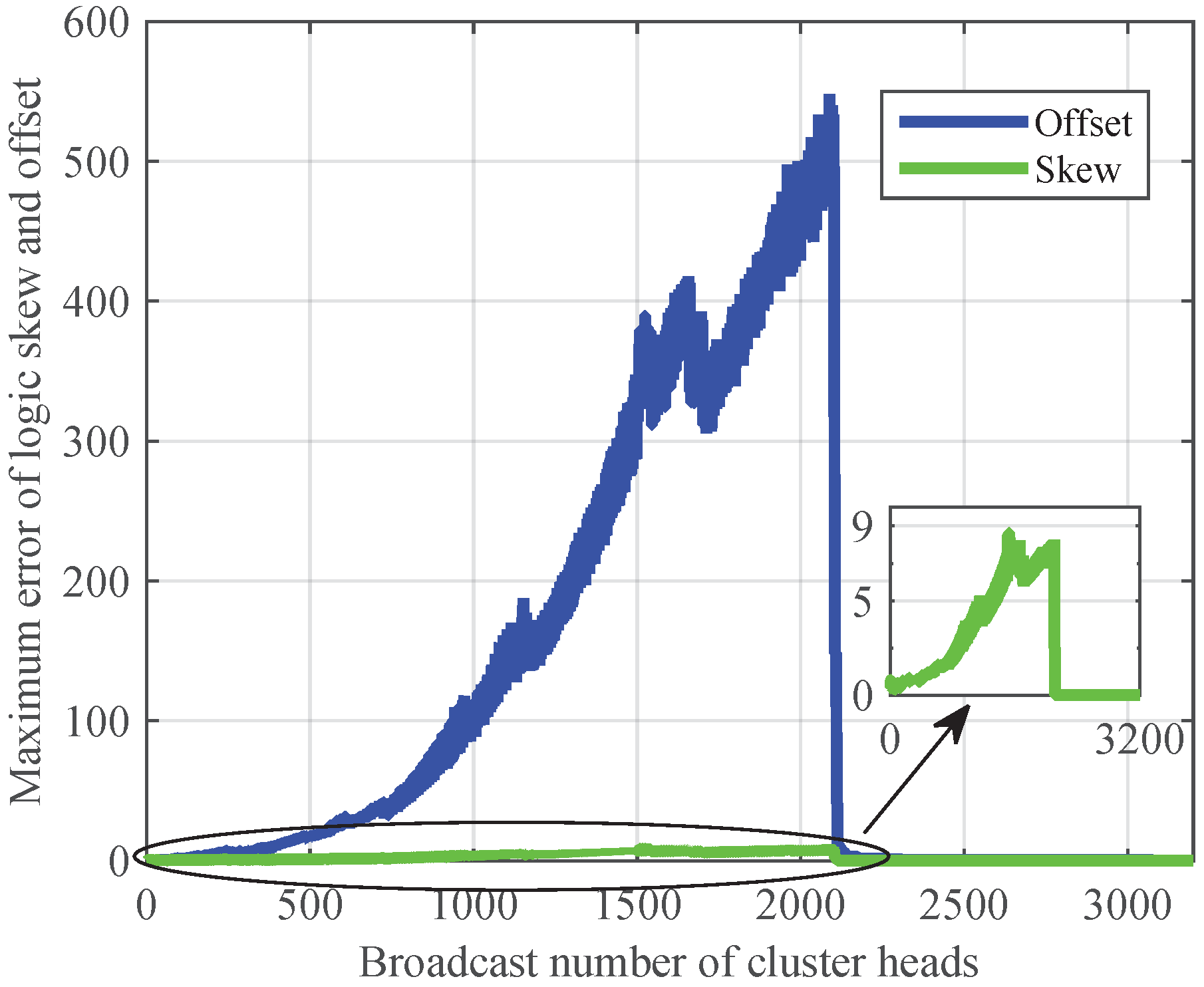
5.2.2. With Communication Delays
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Wang, Z.-W.; Zeng, P.; Zhou, M.-T.; Li, D. Cluster-based maximum consensus time synchronization in IWSNs. In Proceedings of the IEEE 83rd Vehicular Technology Conference-Spring, Nanjing, China, 15–18 May 2016; p. 15.
- Gallloway, B.; Hancke, G.P. Introduction to industrial control networks. IEEE Commun. Surv. Tutor. 2012, 15, 860–880. [Google Scholar] [CrossRef]
- He, Z.-D.; Zhang, W.-N.; Wang, H.-F.; Huang, W.-J. Joint routing and scheduling optimization in industrial wireless networks using an extremal dynamics algorithm. Inf. Control 2014, 43, 152–158. [Google Scholar]
- Xu, C.-N.; Zhao, L.; Xu, Y.-J.; Li, X.-W. Simsync: A time synchronization simulator for sensor networks. Acta Autom. Sin. 2006, 32, 1008–1014. [Google Scholar]
- Chen, J.; Yu, M.; Dou, L.-H.; Gan, M.-G. A fast averaging synchronization algorithm for clock oscillators in nonlinear dynamical network with arbitrary time-delays. Acta Autom. Sin. 2010, 36, 873–880. [Google Scholar] [CrossRef]
- Wang, F.-Q.; Zeng, P.; Yu, H.-B. An energy-efficient time synchronization algorithm for wireless sensor networks. Inf. Control 2011, 40, 753–759. [Google Scholar]
- Elson, J.; Girod, L.; Estrin, D. Fine-grained network time synchronization using reference broadcasts. ACM SIGOPS Oper. Syst. Rev. 2002, 36, 147–163. [Google Scholar] [CrossRef]
- Ganeriwal, S.; Kumar, P.; Srivastava, M.B. Timing-sync protocol for sensor networks. In Proceedings of the 1st International Conference on Embedded Networked Sensor Systems, Los Angeles, CA, USA, 5–7 November 2003; pp. 138–149.
- Maroti, M.; Kusy, B.; Simon, G.; Ledeczi, A. The flooding time synchronization protocol. In Proceedings of the 2nd International Conference on Embedded Networked Sensor Systems, Baltimore, MD, USA, 3–5 November 2004; pp. 39–49.
- Yildirim, K.S.; Kantarci, A. Time synchronization based on slow-flooding in wireless sensor networks. IEEE Trans. Parallel Distrib. Syst. 2014, 25, 244–253. [Google Scholar] [CrossRef]
- Cho, H.; Kim, J.; Baek, Y. Enhanced precision time synchronization for wireless sensor networks. Sensors 2011, 11, 7625–7643. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- He, J.-P.; Cheng, P.; Shi, L.; Chen, J.-M. Time synchronization in WSNs: a maximum-value-based consensus approach. In Proceedings of the 2011 50th IEEE Conference on Decision and Control and European Control Conference, Orlando, FL, USA, 12–15 December 2011; pp. 7882–7887.
- Lin, L.; Ma, S.-W.; Ma, M.-D. A group neighborhood average clock synchronization protocol for wireless sensor networks. Sensors 2014, 14, 14744–14764. [Google Scholar] [CrossRef] [PubMed]
- Wang, H.; Zeng, H.; Wang, P. Clock skew estimation of listening nodes with clock correction upon every synchronization in wireless sensor networks. IEEE Signal Process. Lett. 2015, 22, 2440–2444. [Google Scholar] [CrossRef]
- Sun, W.; Brannstrom, F.; Strom, E.G. On clock offset and skew estimation with exponentially distributed delays. In Proceedings of the IEEE International Conference on Communications, Budapest, Hungary, 9–13 June 2013; pp. 1872–1877.
- Yadav, P.; Yadav, N.; Varma, S. Cluster based hierarchical wireless sensor networks (CHWSN) and time synchronization in CHWSN. In Proceedings of the IEEE International Symposium on Communications and Information Technologies (ISCIT), Sydney, Australia, 17–19 October 2007; pp. 1149–1154.
- Kong, L.; Wang, Q.; Zhao, Y. Time synchronization algorithm based on cluster for wsn. In Proceedings of the 2nd IEEE International Conference on Information Management and Engineering (ICIME), Chengdu, China, 16–18 April 2010; pp. 126–130.
- Wu, J.; Zhang, L.; Bai, Y. Cluster-based consensus time synchronization for wireless sensor networks. IEEE Sens. J. 2015, 15, 1404–1413. [Google Scholar] [CrossRef]
- Garone, E.; Gasparri, A.; Lamonaca, F. Clock synchronization for wireless sensor network with communication delay. In Proceedings of the American Control Conference, Washington, DC, USA, 17–19 June 2013; pp. 771–776.
- Garone, E.; Gasparri, A.; Lamonaca, F. Clock synchronization protocol for wireless sensor networks with bounded communication delays. Automatica 2015, 59, 60–72. [Google Scholar] [CrossRef]
- Schenato, L.; Fiorentin, F. Average timesynch: A consensus-based protocol for clock synchronization in wireless sensor networks. Automatica 2011, 47, 1878–1886. [Google Scholar] [CrossRef]
- Wei, Y.-L.; Qiu, J.-B.; Karimi, H.R.; Wang, M. Model approximation for two-dimensional Markovian jump systems with state-delays and imperfect mode information. Multidimens. Syst. Signal Process. 2015, 26, 575–597. [Google Scholar] [CrossRef] [Green Version]
- Wei, Y.-L.; Qiu, J.-B.; Karimi, H.R.; Wang, M. Filtering design for two-dimensional Markovian jump systems with state-delays and deficient mode information. Inf. Sci. 2014, 269, 316–331. [Google Scholar] [CrossRef]
- Wei, Y.-L.; Qiu, J.-B.; Fu, S.-S. Mode-dependent nonrational output feedback control for continuous-time semi-Markovian jump systems with time-varying delay. Nonlinear Anal. Hybrid Syst. 2015, 16, 52–71. [Google Scholar] [CrossRef]
- Wei, Y.-L.; Qiu, J.-B.; Karimi, H.-R.; Wang, M. New results on dynamic output feedback control for Markovian jump systems with time-varying delay and defective mode information. Optim. Control Appl. Methods 2014, 35, 656–675. [Google Scholar] [CrossRef]
- He, J.-P.; Duan, X.-M.; Cheng, P.; Shi, L.; Cai, L. Distributed time synchronization under bounded noise in wireless sensor networks. In Proceedings of the IEEE 53rd Annual Conference on Decision and Control, Los Angeles, CA, USA, 15–17 December 2014; pp. 6883–6888.
- He, J.-P.; Li, H.; Chen, J.-M.; Cheng, P. Study of consensus-based time synchronization in wireless sensor networks. ISA Trans. 2014, 53, 347–357. [Google Scholar] [CrossRef] [PubMed]
- Maggs, M.K.; O’Keefe, S.G.; Thiel, D.V. Consensus clock synchronization for wirelss sensor networks. IEEE Sens. J. 2012, 12, 2269–2277. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Definitions |
|---|---|
| the local clock reading of node i at time t; | |
| the local clock skew of node i; | |
| the local clock offset of node i; | |
| the logical clock reading of node i at time t; | |
| the skew compensation parameter of node i at time t; | |
| the offset compensation parameter of node i at time t; | |
| n | the number of nodes; |
| m | the number of clusters; |
| the number of nodes in cluster i; | |
| , | the time just after updating at time t, ; |
| the relative clock skew between node i and j; | |
| U | the upper bound on the communication delay; |
| L | the lower bound on the interval between the transmissions of two sync packets. |
| Node | ||||||
|---|---|---|---|---|---|---|
| A | 0.4 | 0.7 | 1 | 0 | 0.4 | 0.7 |
| 1 | 0.8 | 0.9 | 1 | 0 | 0.8 | 0.9 |
| 2 | 0.5 | 0.3 | 1 | 0 | 0.5 | 0.3 |
| 3 | 0.6 | 0.7 | 1 | 0 | 0.6 | 0.7 |
| 4 | 0.3 | 0.5 | 1 | 0 | 0.3 | 0.5 |
| Node | ||||||
|---|---|---|---|---|---|---|
| A | 0.4 | 0.7 | ||||
| 1 | 0.8 | 0.9 | 1 | 0 | 0.8 | 0.9 |
| 2 | 0.5 | 0.3 | ||||
| 3 | 0.6 | 0.7 | ||||
| 4 | 0.3 | 0.5 |
© 2017 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Z.; Zeng, P.; Zhou, M.; Li, D.; Wang, J. Cluster-Based Maximum Consensus Time Synchronization for Industrial Wireless Sensor Networks. Sensors 2017, 17, 141. https://doi.org/10.3390/s17010141
Wang Z, Zeng P, Zhou M, Li D, Wang J. Cluster-Based Maximum Consensus Time Synchronization for Industrial Wireless Sensor Networks. Sensors. 2017; 17(1):141. https://doi.org/10.3390/s17010141
Chicago/Turabian StyleWang, Zhaowei, Peng Zeng, Mingtuo Zhou, Dong Li, and Jintao Wang. 2017. "Cluster-Based Maximum Consensus Time Synchronization for Industrial Wireless Sensor Networks" Sensors 17, no. 1: 141. https://doi.org/10.3390/s17010141