1. Introduction
Biodiversity in a given area depends on, to a large extent, and supports the most vital natural resources in the soil, which also contribute to the provision of basic human needs such as food, fresh air, and clean water [
1]. Therefore, human survival largely depends on the soil component. Soil erosion in the form of gully erosion is a serious global problem, and it continues to pose a threat to soil and water resources, particularly in arid and semi-arid regions of Iran [
2,
3]. Among the several types of water-induced erosion, gully erosion is a more intense form of soil erosion [
4] and is one of the most complex geomorphic phenomena on the Earth’s surface [
5]. Such erosional activities also change the shape of the Earth’s landform and produce a rugged topography, which is not suitable for production activities, construction of communication networks, etc. Thus, water-induced soil erosion is the main cause of the destruction of agricultural land, vegetation, and ecosystems, and is ultimately responsible for a devastating land degradation phenomenon. It has been estimated that the annual rate of global soil erosion is approximately 75 billion tons [
6]. From an international perspective, Iran ranks second in terms of land losses, and the annual rate of soil erosion is close to 2 to 2.5 billion tons [
7]. It has also been predicted that Iran’s average soil erosion rate is 30–32 tons/ha/year, which is 4.3 times the world average (Food and Agriculture Organization of the United Nations (FAO), 1984). In Iran, soil erosion has been estimated to have caused more than USD 1 billion in economic losses (FAO, 2015) and is a national threat [
8]. Thus, it is necessary to protect the soil from erosion and to avoid the phenomenon of land degradation worldwide. The main cause of intensive water-related gully erosion and its development is a long hot/dry season followed by an extremely wet period. Therefore, extreme rainfall causes a large amount of surface runoff over the infiltration capacity and easily transports loose soil particles onto the downward slope. Thus, soil erosion related to water in Iran is a major barrier to sustainable development in the areas of agriculture, watershed management, and other activities related to resource development [
9]. Hence, the preparation of a gully erosion susceptibility (GES) map is essential for sustainable management, development, and protection of the most vital natural resource on the Earth’s surface, i.e., soil, from intense gully formation and development.
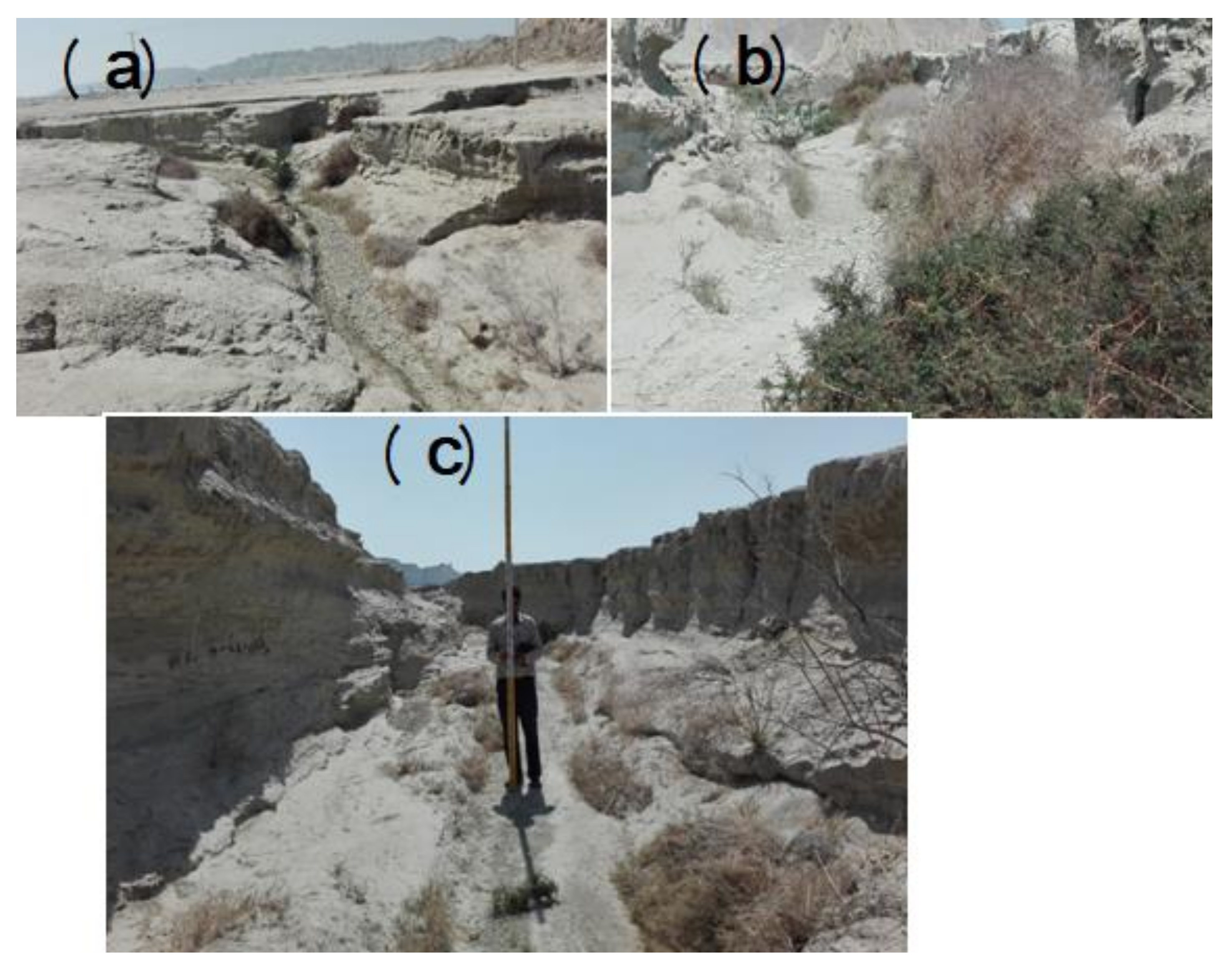
Before preparing a GES map, it is necessary to understand the definition of a gully, its morphological characteristics, causes of occurrences, conditioning factors, and its ultimate impact on the land surface. A gully can be defined as a deep, narrow channel with a depth of more than 30 cm, usually produced by surface and subsurface runoff after a heavy downpour with a temporary flow of water within that channel [
8]. Gullies generally transport a large amount of sediment from the high slope or plateau of the unprotected soil surface, i.e., areas with less vegetation, to the down-slope areas of a watershed. It is also a fact that within 5% of the area of a watershed, between 10% and 94% of sediment moves downwards due to gully erosion [
10]. According to Poesen [
11], different factors affect gully erosion, and these factors are classified into two categories: (a) anthropogenic activities such as excessive use of farm land, overgrazing, unplanned manner of road construction, deforestation, etc., and (b) physical conditions such as topography, climate, vegetation cover, mineral composition in the soil, etc. Depending upon the depth, gullies are classified into three types, i.e., if the depth is <0.3 m then it is called a grove, if the depth is between 0.3 and 2 m it is called a shallow gully, and if the depth is >2 m it is known as a deep gully [
12]. Intensive gully erosion causes many environmental problems, such as accumulation of sediment in rivers and devastating floods, as it removes fertile soils, which has a serious impact on agricultural fields, minimizes soil water storage capacity, destroys roads, and ultimately produces badlands [
13,
14,
15]. It is also a well-known fact that similar factors are not responsible for the occurrence of gullies in several places in the world. Gullies are generally formed and developed based on the local topographical, climatological, and hydrological characteristics. Therefore, different gully-prone areas and associated factors need to be identified by mapping the gully erosion susceptibility. Not only this, but a suitable prediction model along with the identification of respective favorable gully erosion conditioning factors (GECFs) are also essential for an unbiased prediction result. Several methods such as statistical, machine learning (ML), and ensemble algorithms have been used for mapping GES, with the combination of remote sensing and geographic information systems. Thus, GES mapping, using the aforementioned newly developed methods, can help land use planners to maintain soil and water resources sustainably and accurately. Furthermore, the potential of the respective region will ultimately increase when suitable measures are taken.
In recent times, ML algorithms have been widely used for the spatial prediction of several natural hazards such as flooding, landslides [
16], wildfires [
17], etc. Several researchers throughout the world have carried out GES mapping by using statistical as well as ML algorithms. Some of the widely used statistical methods to predict GES mapping are frequency ratio [
7], logistic regression [
18], weight of evidence (WoE) [
19], index of entropy (IoE) [
5], etc. Besides statistical methods, different ML algorithms have also been widely used to predict GES mapping such as artificial neural network (ANN) [
20], support vector machine (SVM) [
20], random forest (RF) (Hosseinalizadeh et al. 2019), multi-layer perception (MLPC) approaches [
21], classification and regression tree (CART) [
22], boosted regression tree (BRT) [
7], particle swarm optimization (PSO) [
23], multi-variate adaptive regression spline (MARS) [
5], and maximum entropy [
24]. Ensemble models have also been widely used for their novelties and capabilities in the comprehensive analysis of GES mapping [
25]. Ensemble models are applied for high precision and predictive analysis of any kind of natural hazard susceptibility mapping. In other words, the presentation of an ML model is significantly enhanced by using an ensemble model. Along with machine learning models, different ensemble models have also been used for gully erosion modeling [
20].
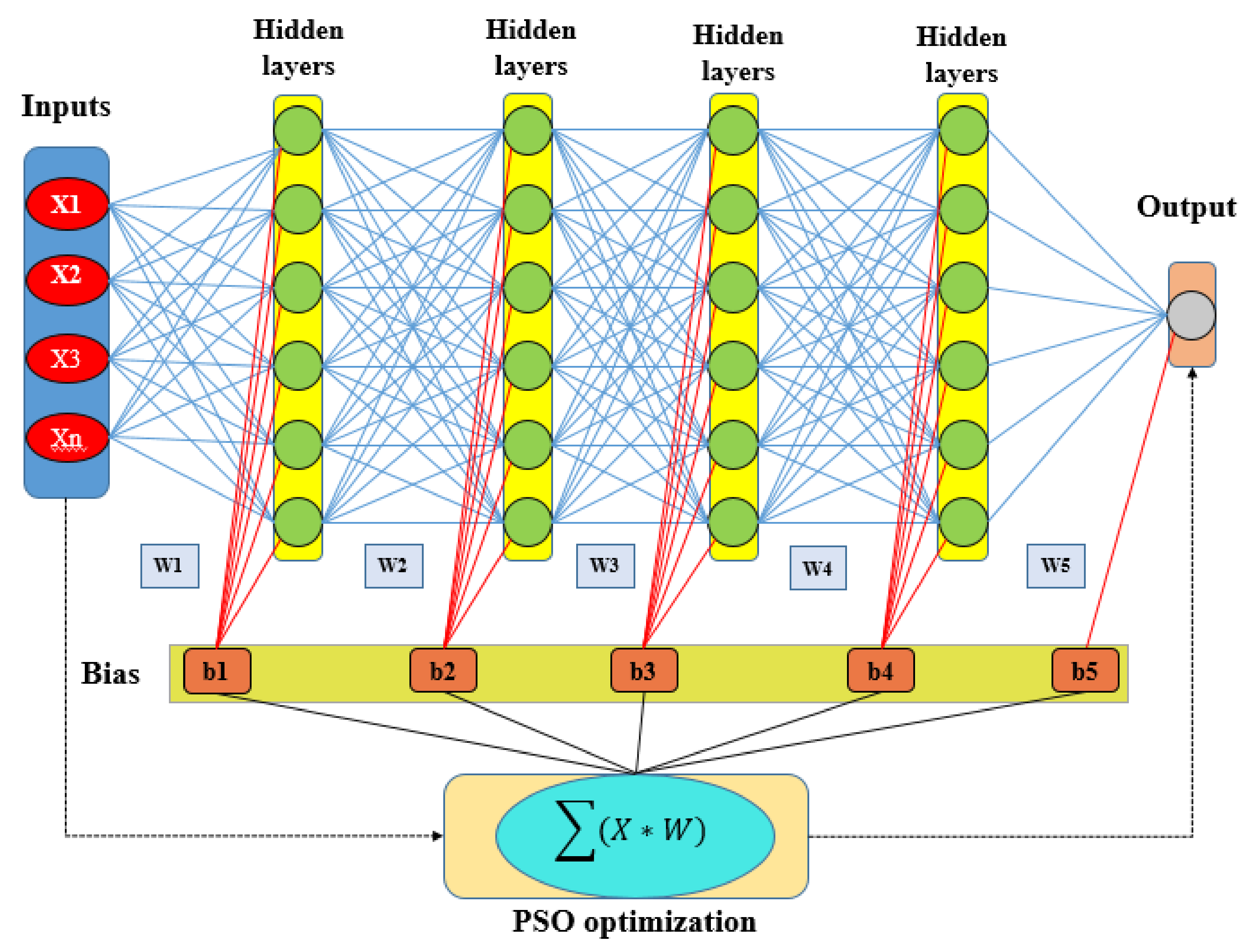
In very recent times, the deep neural learning network (DLNN) is a striking ML algorithm and has been widely used by several research groups. This method was proposed for the first time in 2006 and includes different key features of ML as well as artificial intelligence (AI). The DLNN algorithm consists of fully convolutional neural networks (CNNs), deep belief networks (DBNs), stacked auto-encoder (SAE) networks, etc. [
26]. In addition to this, the Adaptive moment estimation (Adam) and Rectified Linear Unit (ReLU) algorithms were used for training and activation purposes in every learning unit of a DLNN model [
27]. Generally, the DLNN algorithm has been used in different fields such as feature extraction and transformation through supervised and unsupervised processes, recognition of patterns, and classification [
28]. On the other hand, the particle swarm optimization (PSO) algorithm is an extended part of AI and an amalgamation of the conventional ML techniques. The PSO algorithm is based on swarm intelligence, and it is straightforward with efficient universal optimization techniques [
26]. PSO is used for the feature selection of a dataset through optimization techniques.
Deep learning (DL) and traditional ML algorithms have some basic differences, namely that the DL algorithm needs a big data size to perform and analyze successfully, and in the case of ML algorithms, they are performed in a certain way according to established rules. The DL algorithm requires a lot more matrix operation functions than the ML algorithm does to perform well [
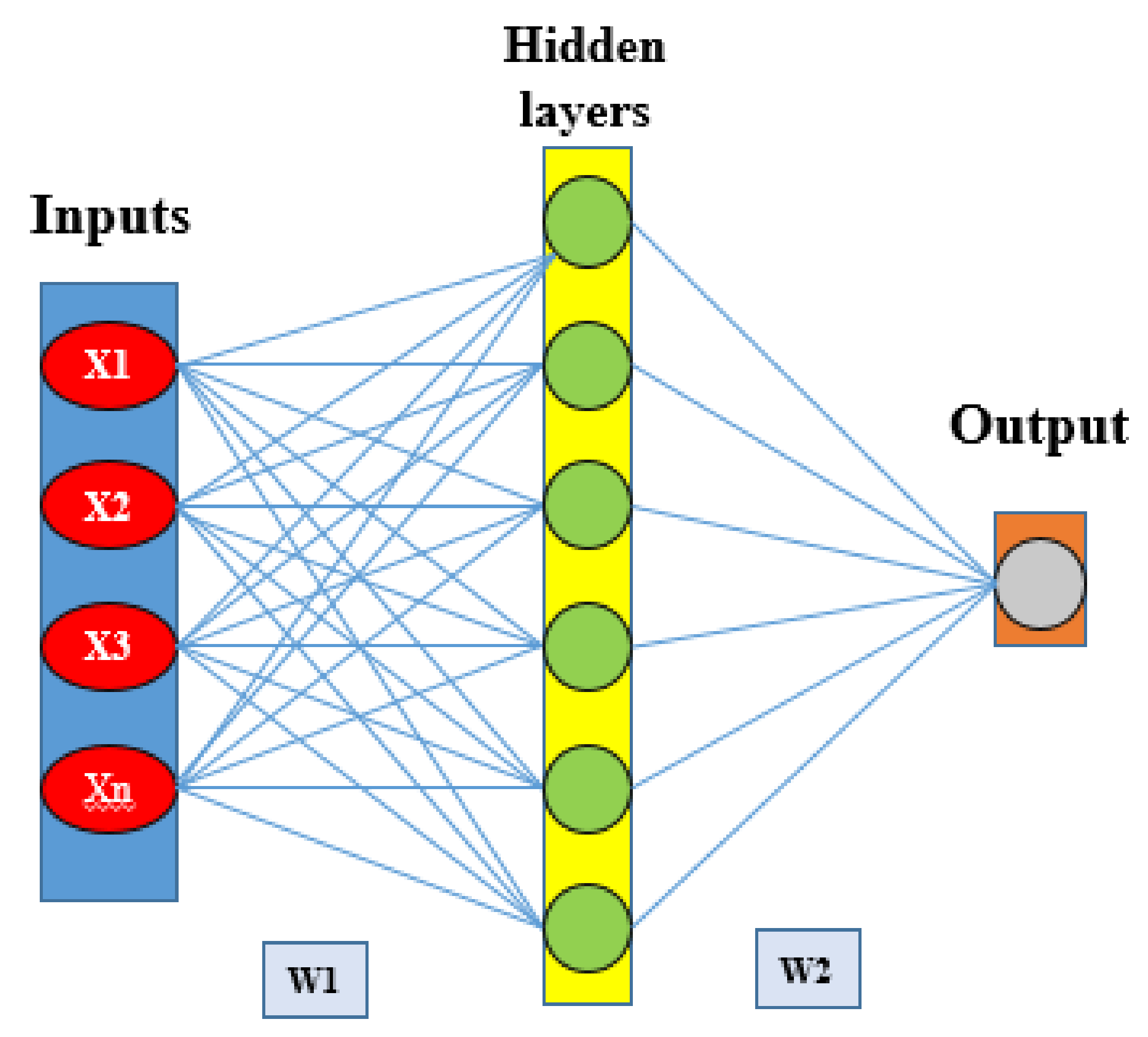
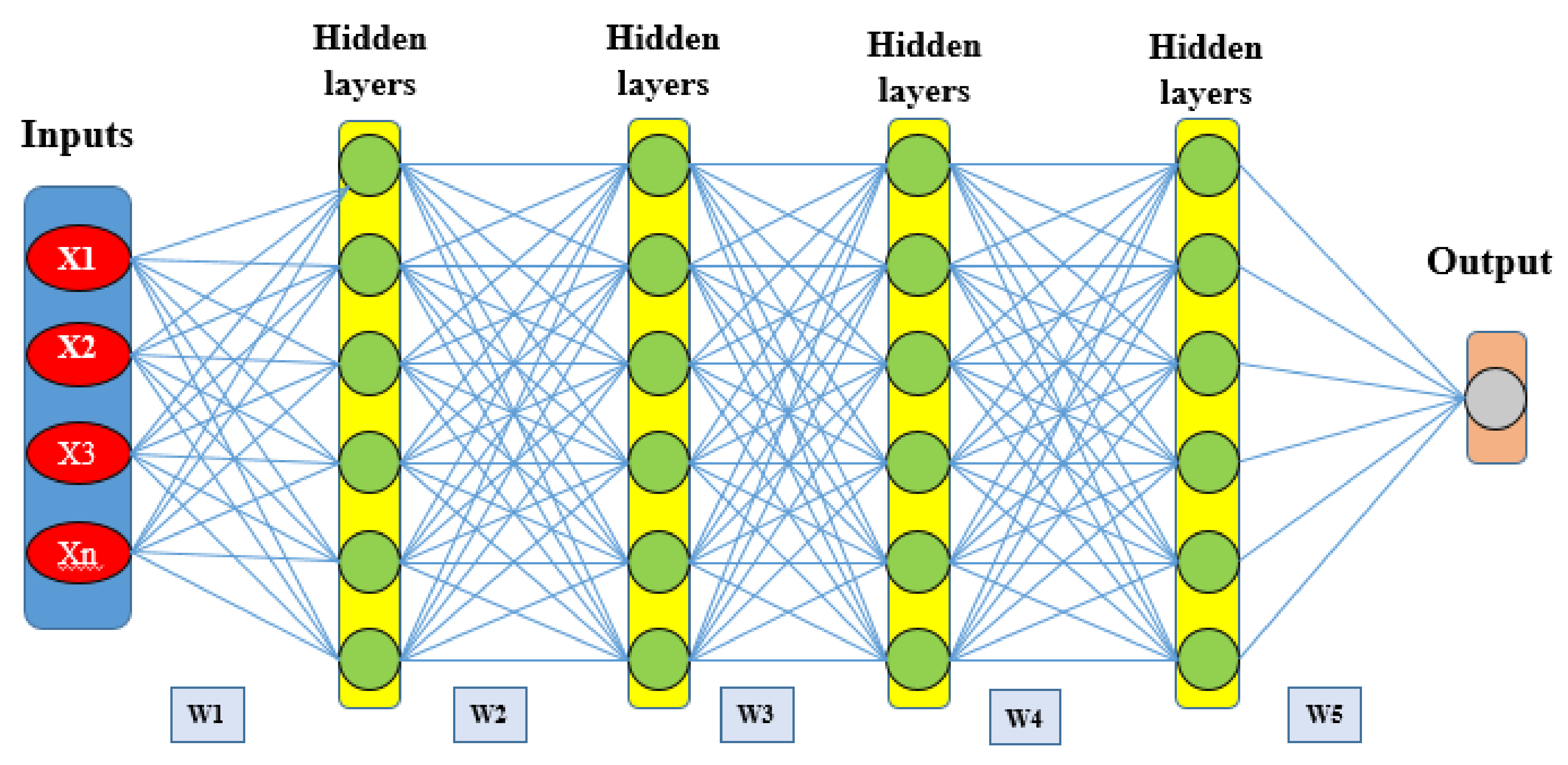
29]. In the case of the problem-solving method, the DL algorithm is done through end-to-end problem solving, whereas in the case of ML, it breaks down into multiple sub-problems. Therefore, the DL algorithm is much better than the traditional ML algorithm for mapping the GES zone. Thus, the greatest advantage of using the DLNN algorithm is that this model is capable of building a high-level feature from a raw dataset scientifically, and is also capable of delivering forecasting results using time series data. In addition to this, DLNN consists of a different topology than the general neural network of a single hidden layer; thus, more than one hidden layer is present in this algorithm. For this reason, in various research areas, the DL algorithm has better performance than the conventional ML algorithm [
30]. In the case of PSO, it is also used to conquer the problems of local optima through feature selection methods. PSO determines the quality of a dataset’s features through a multi-objective fitness function [
31]. As a result, the output layer of different hidden layers is optimized by the PSO algorithm to obtain more accurate predictions [
32].
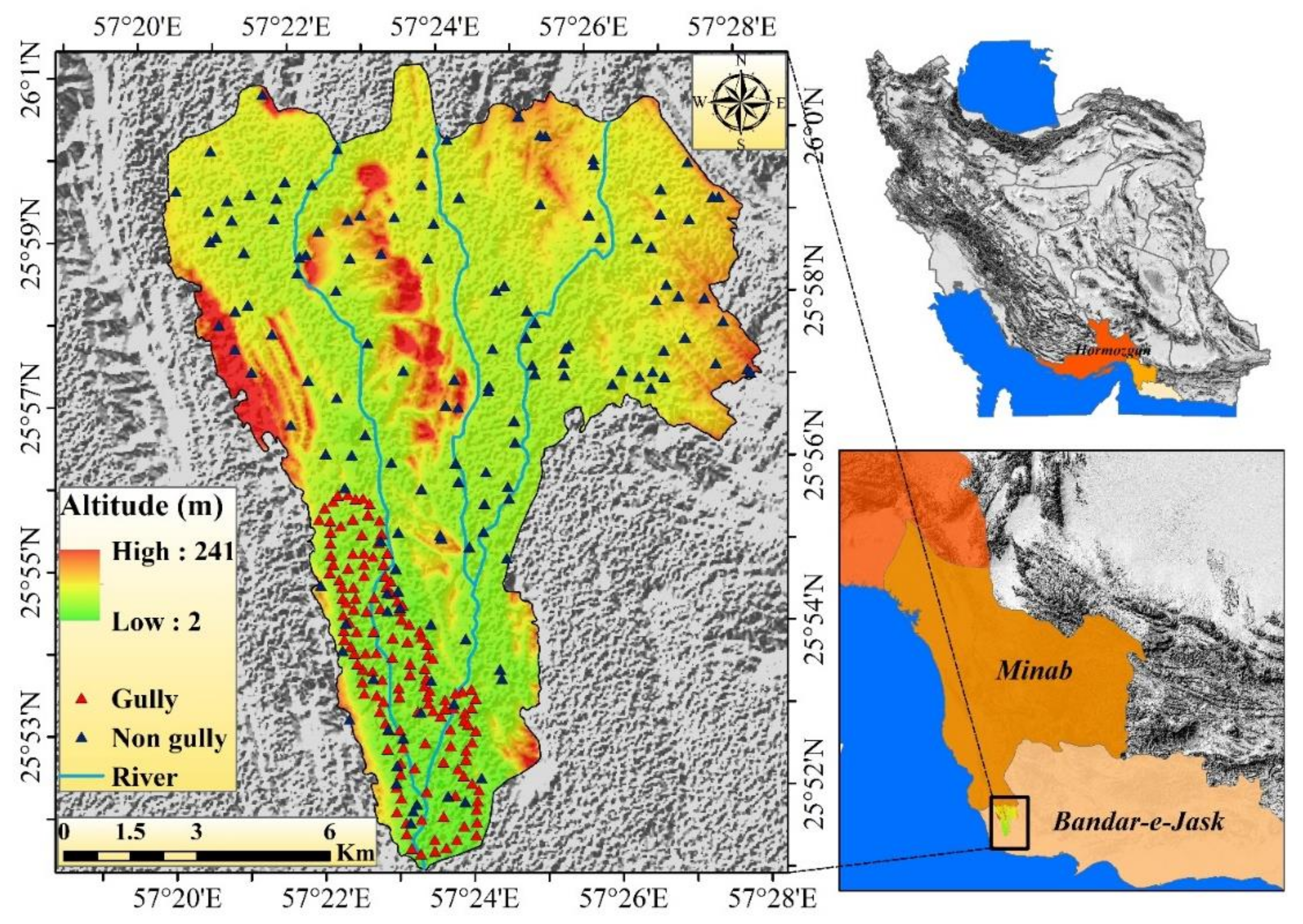
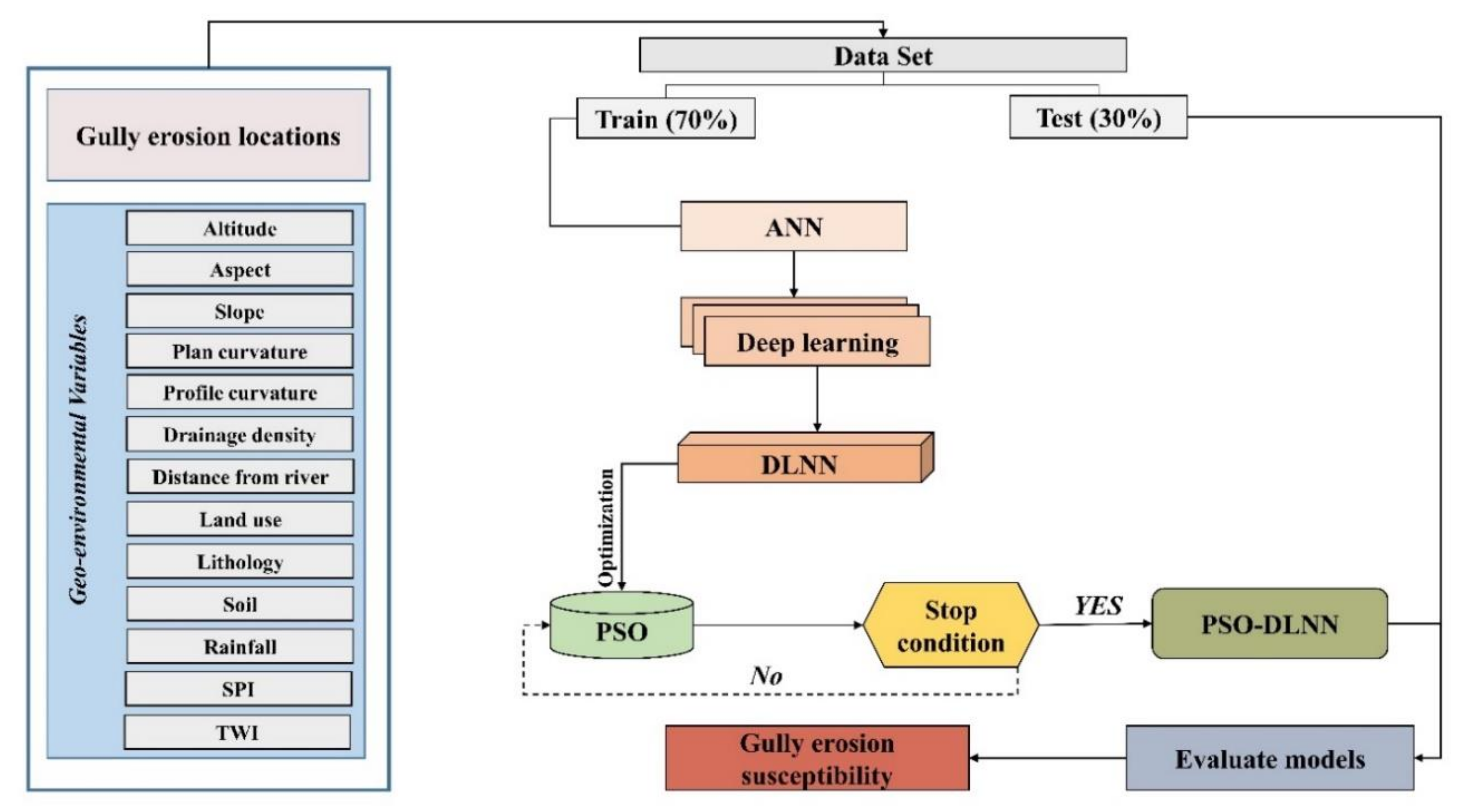
Therefore, the present research work has been carried out to predict GES mapping in Shirahan watershed, which is tremendously affected by water-induced gully erosion. To fulfill our research objective, we used thirteen suitable GECFs with a total of 132 gully head-cut points (each for gully and non-gully), splitting them into a 70/30 ratio for training and testing datasets. Furthermore, to creatively model the GES mapping, we used a DL as well as a conventional ML algorithm. In this study, we used DLNN, PSO, artificial neural network (ANN), and support vector machine (SVM) algorithms. According to several literature surveys on GES mapping and the best of our knowledge, it was noticed that the DLNN model has not been used in GES assessment so far; thus, this study was carried out to investigate the potential application of the DLNN model for GES mapping. In this study, an attempt was also made to use the PSO algorithm to optimize the parameters of the deep learning model (DLNN) in the training phase and to introduce a new approach of an ensemble of PSO and DLNN in GES modeling. Not only this, but a comparison was also made between the ensemble of PSO-DLNN and conventional ANN and SVM algorithms. Thus, the application of DL and the PSO-DLNN ensemble approach for GES mapping is the novelty in this research study, as the result of this approach improved the prediction accuracy compared with any single ML algorithm. Thereafter, all of the output results were validated through sensitivity (SST), specificity (SPF), positive predictive values (PPV), negative predictive values (NPV), receiver operating characteristic-area under the curve (ROC-AUC), likelihood ratio, F-measures, and maximum probability of correct decision (MPCD) statistical analyses. Thus, the DL and PSO-DLNN ensemble methods can help to forecast and control the creation and development of gullies in Shirahan watershed, Iran.
4. Discussion
Land degradation through various forms of soil erosion can cause extensive damage, and it has an adverse impact on society and people’s livelihoods throughout the world [
68]. There are various forms of erosion, i.e., sheet erosion, formation of rills, formation and development of gullies and ravines, etc. [
69]. Of these, the formation and development of gullies and their associated erosion is the most destructive element of land degradation worldwide [
2]. Although it is a natural process of erosion, this process can be greatly accelerated by anthropogenic activities and have a serious impact on the ecosystem [
70]. With this type of erosion, agricultural activities have not only affected it but have also been associated with damage to manmade infrastructure. On the one hand, this erosion is responsible for removing the top soil, but on the other hand, it is responsible for the creation and accumulation of sediment in the lower catchment area [
71]. The life span of the reservoir will cause serious damage to the sediment deposition resulting from this type of erosion [
72,
73].
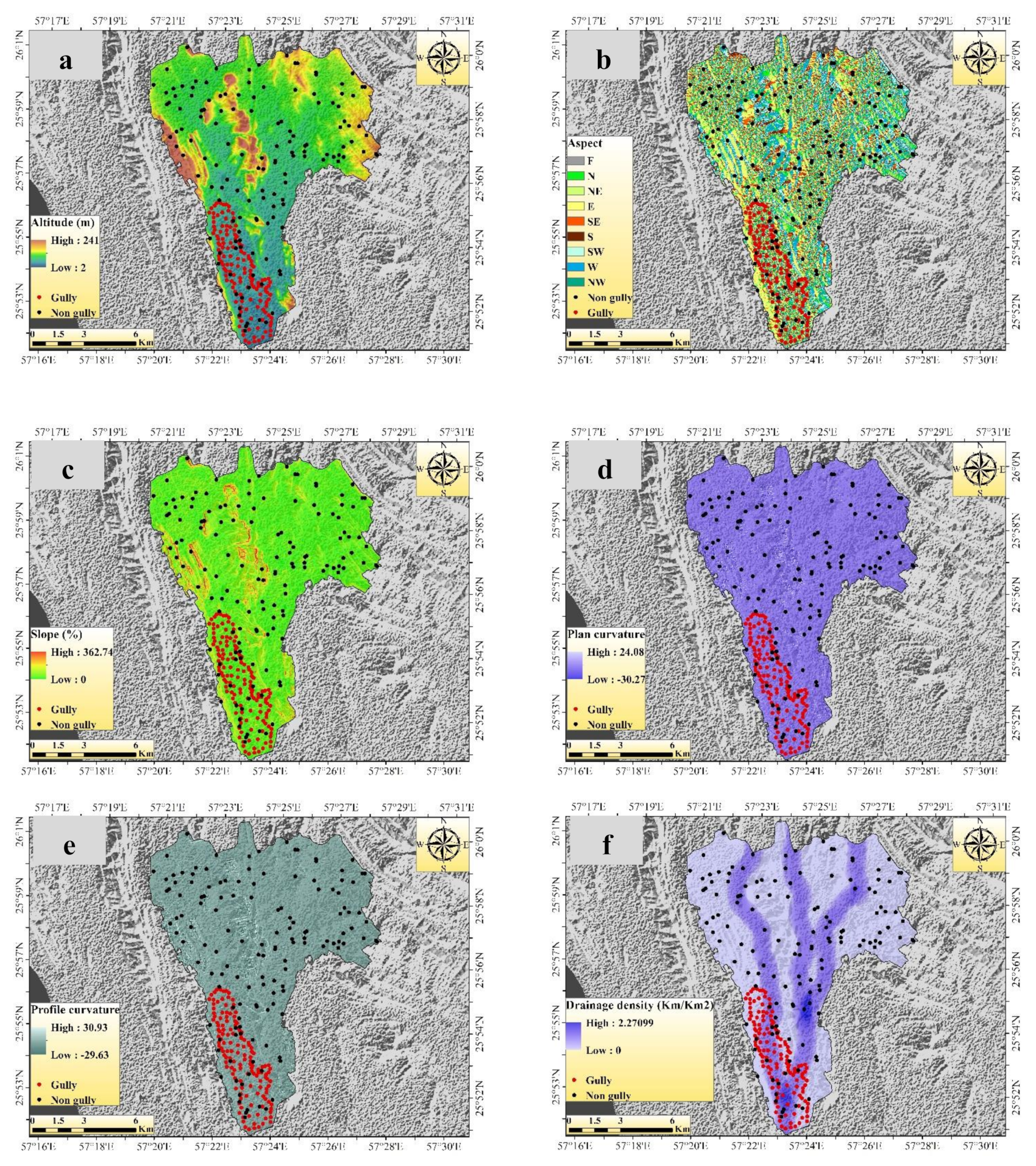
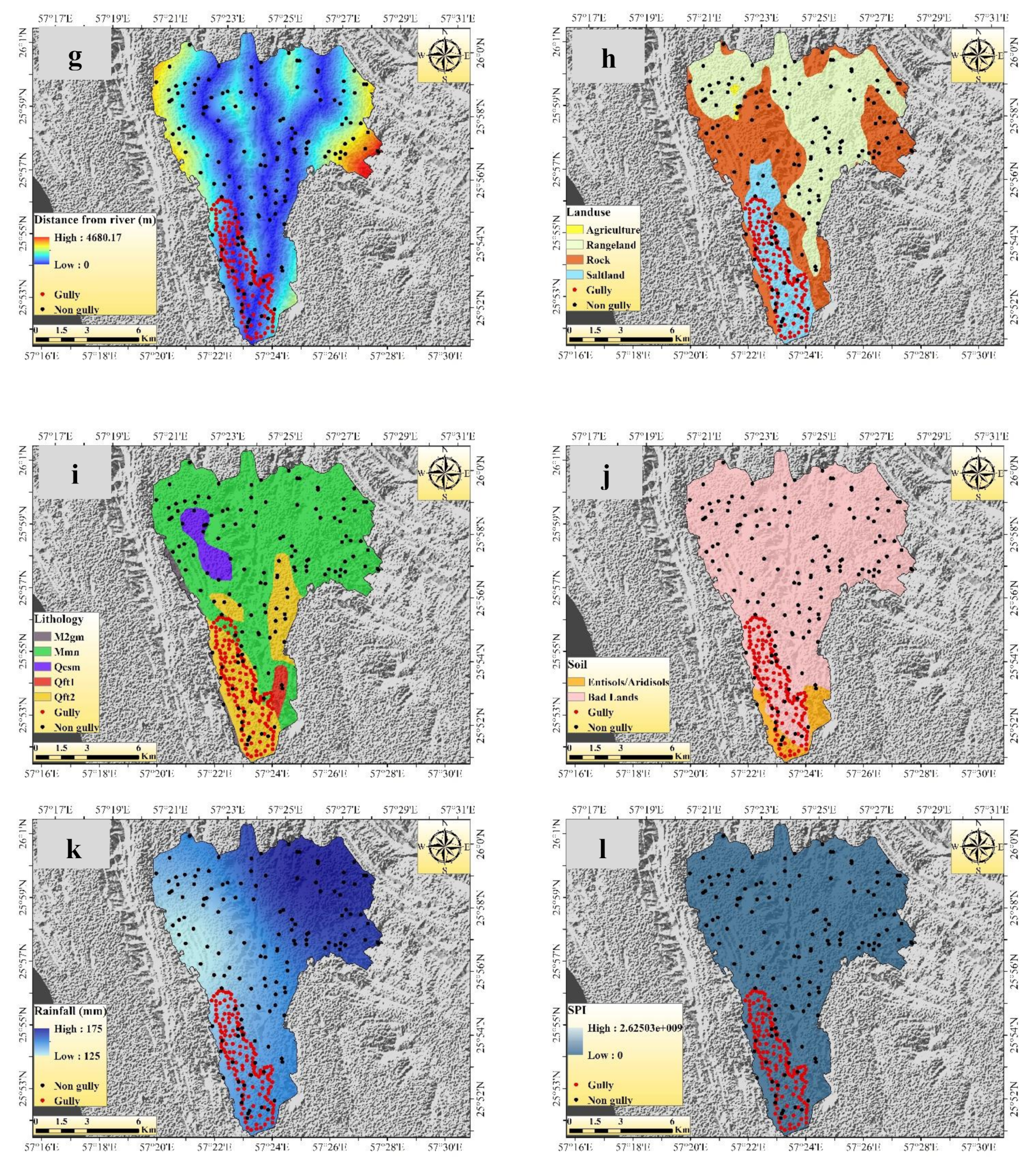
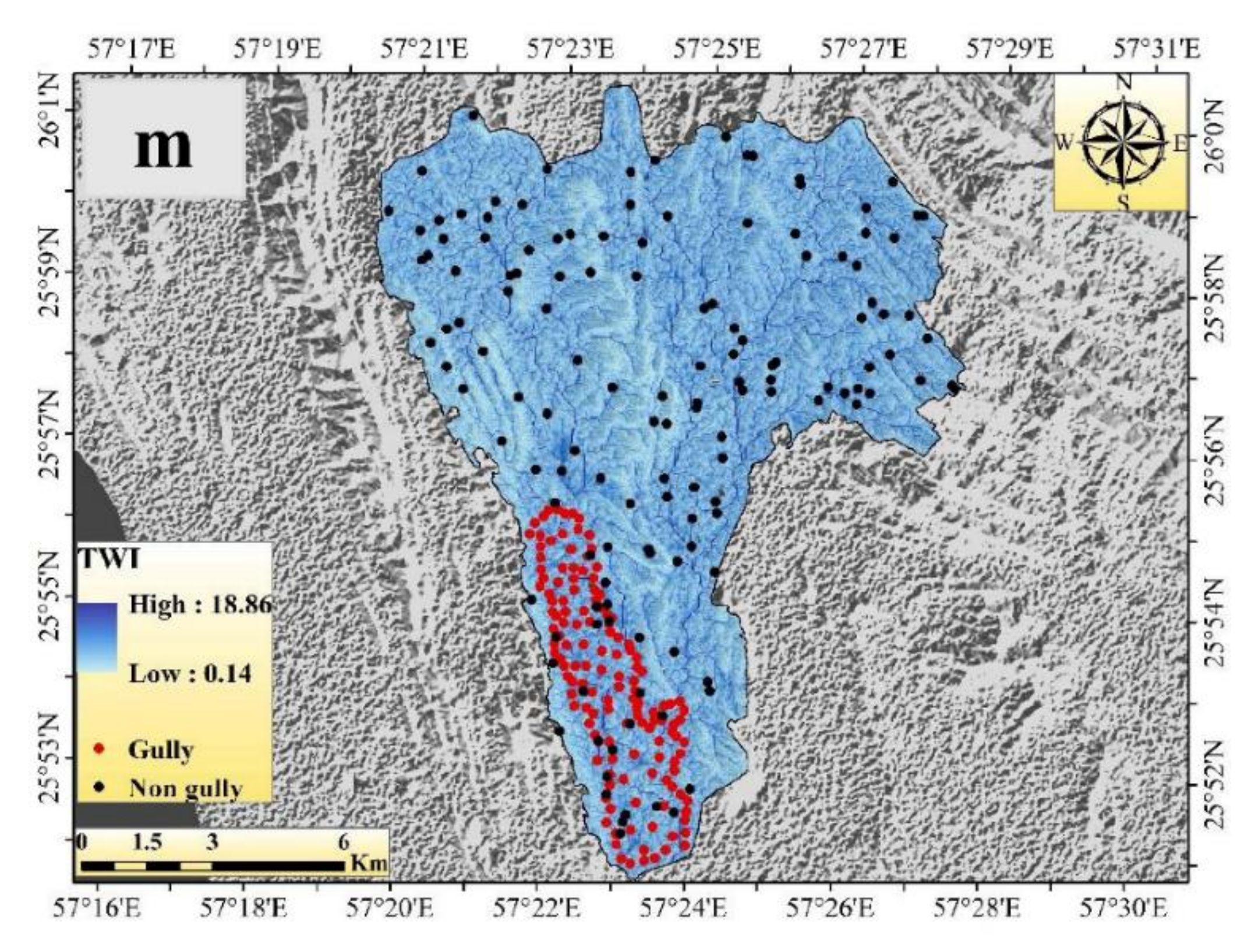
Shirahan watershed in Iran has recently faced severe gully erosion, which is responsible for large-scale erosion and is the main barrier to sustainable land management practices. Therefore, identifying vulnerable regions with the most optimal model is very useful so that appropriate soil and water conservation measures can be put in place. For this purpose, we considered SVM, ANN, DLNN, and PSO-DLNN in order to estimate the GES of this region with the maximum possible accuracy and to suggest the most suitable model. The erosion of a gully is controlled by various causal factors, and we attempted to determine the importance of these factors for gulling. Apart from the topographic and hydrogeomorphic attributes, land use is the most important variable for gully erosion, which indicates the large anthropogenic impact on the development of gullies. Other factors, such as altitude, lithology, rainfall, and the distance from a river, are very influential too on gully erosion and promote gulling. The transformation of land use is a crucial element and is responsible for large-scale erosion [
74]. Alterations in land use influence landscape ecology functions, with far-reaching implications for natural ecosystems and land reclamation [
75]. The character and volume of the surface runoff may change directly with the changing pattern of land use in the region. From this perspective, the nature of erosion in the form of gullies can have a significant effect on the impact of rainfall and its associated runoff characteristics in a changing environment. This type of outcome is similar to some of the findings from the studies of a number of researchers in this diversified discipline. This finding has been highlighted by many other contributions in which morphological and geological properties are assigned as the determinants of the highest possible location of GES [
24,
76]. Other research outcomes suggest that environmental and hydrological parameters are very significant and responsible for gulling.
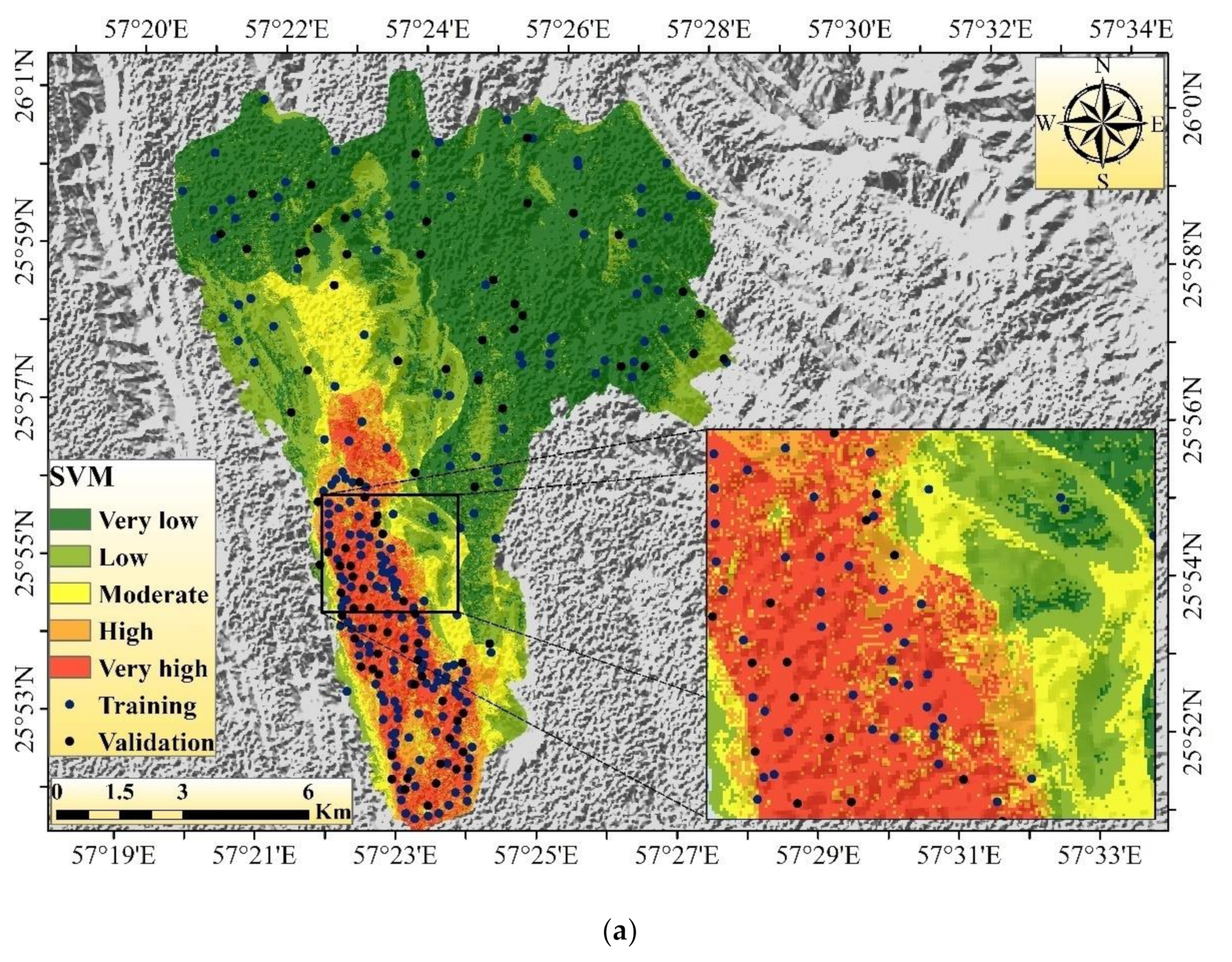
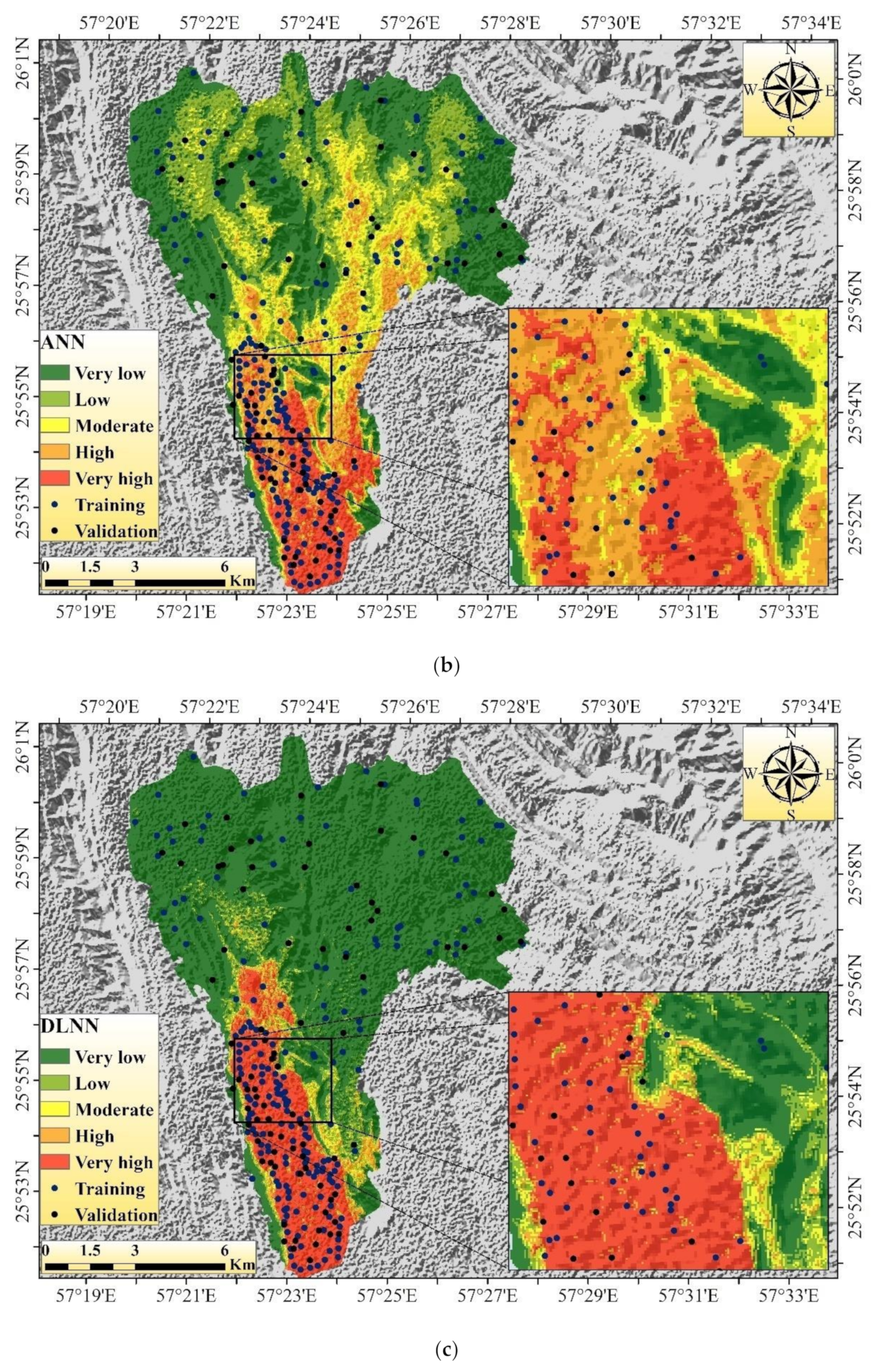
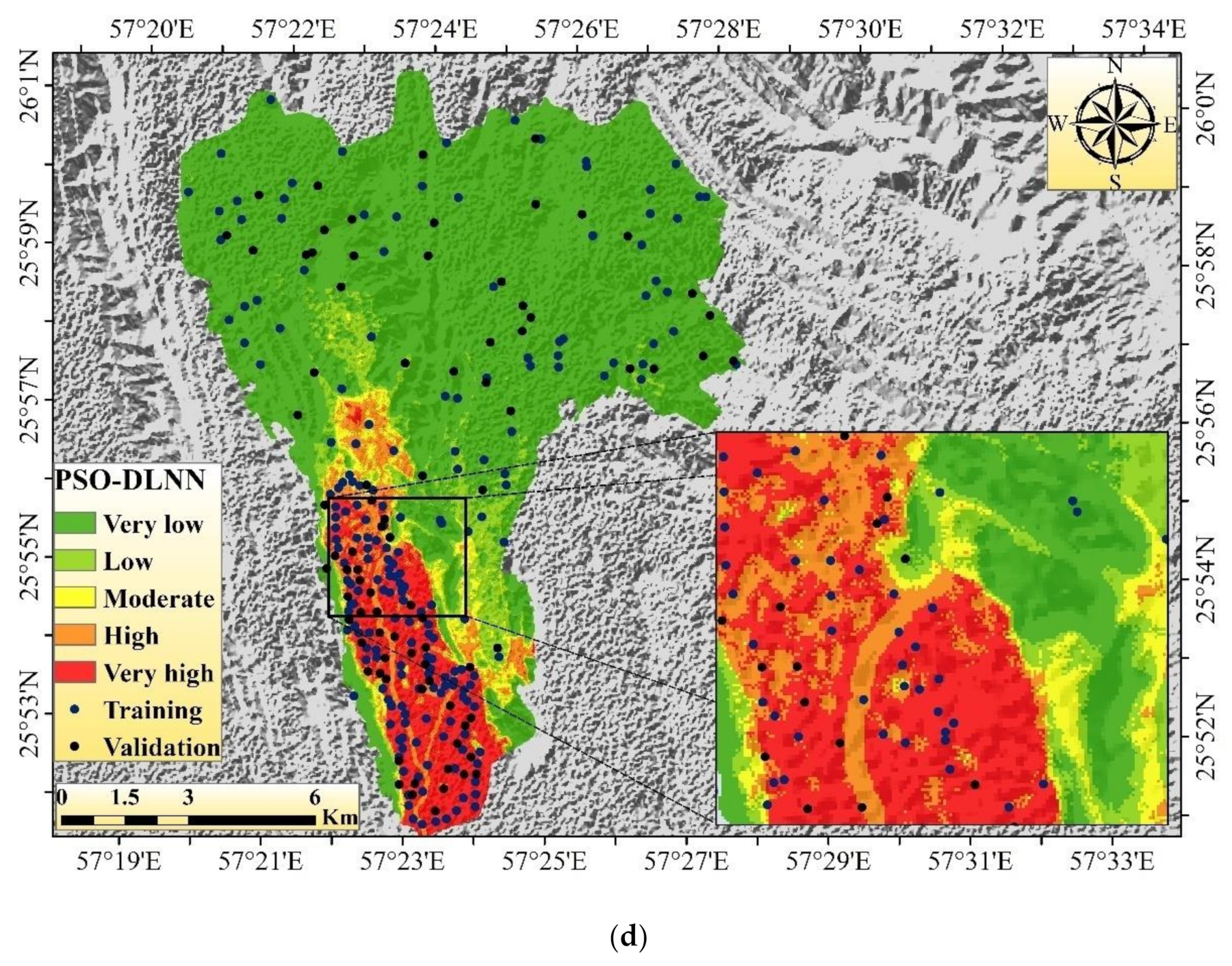
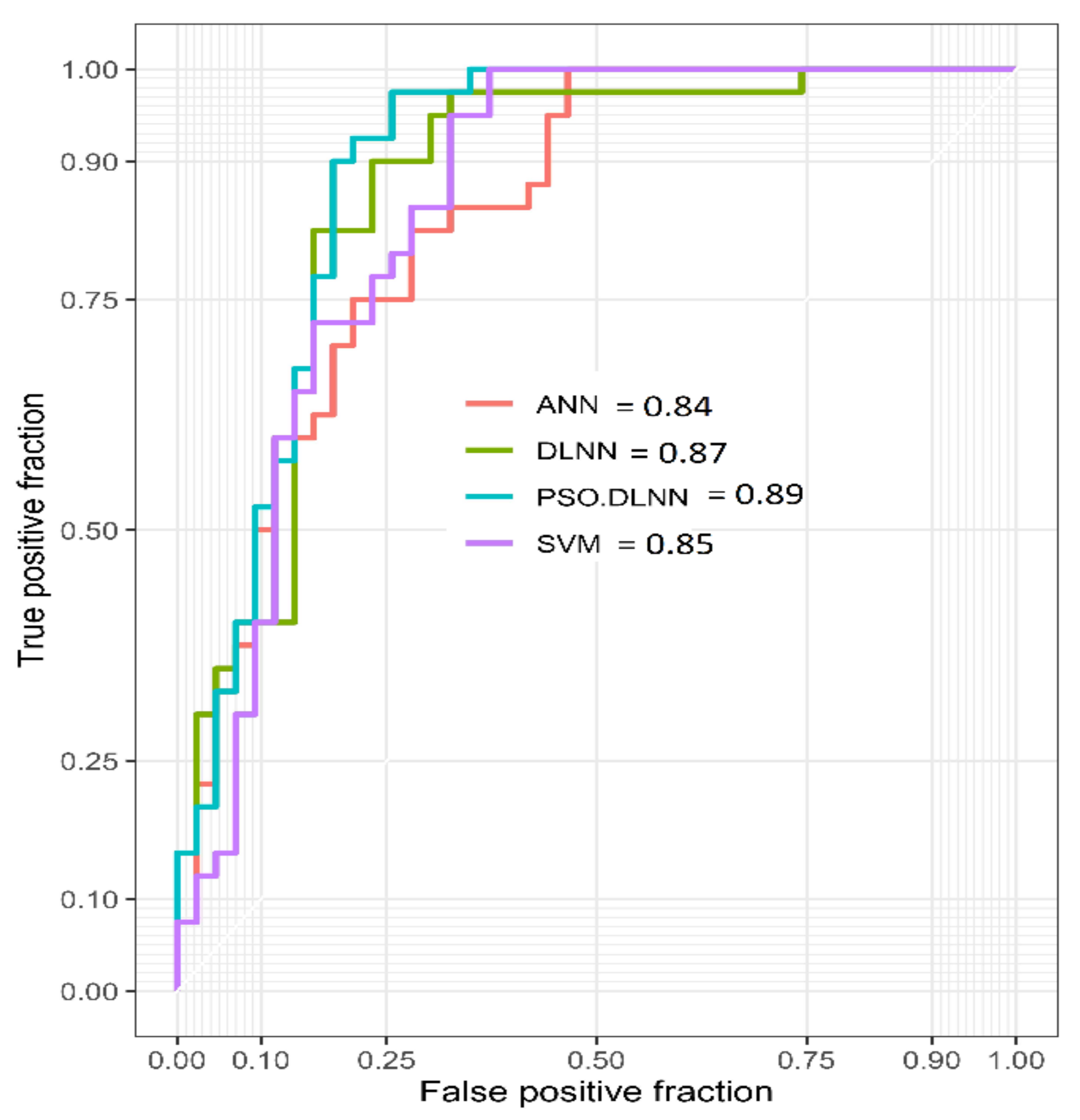
All the predicted models are associated with high accuracy, but PSO-DLNN is the most optimal, with the AUC of this model being 0.89. The efficiency of all predicted models is excellent, with the AUC values for DLNN, SVM, and ANN being 0.87, 0.85, and 0.84, respectively. Apart from this, considering various statistical indices, PSO-DLNN is the best model among the models used in this study. According to the PSO-DLNN model, 18.76% of the total area is associated with a moderate to very high susceptible area of gully erosion. The southern portion of this watershed is mainly associated with higher gully occurrences. The complex geohydrological characteristics of this region are favorable for large-scale erosion in the form of gullies.
A deep learning framework is associated with higher accuracy compared with conventional ANN and SVM ML methods. This model can handle a larger number of samples and even a large amount of big data, and can estimate the results with optimum accuracy. The traditional ML algorithm is not capable of handling this large a number of samples, and the outcome from this perspective is less optimal compared to the deep learning framework. Significant progress in DLNN-dependent deep learning (DL) systems has significantly increased the consistency of machine learning for various purposes. While the standardized features of multi-layer NNs are well-established, the main advantage of DL is its structured method of self-governing the training of DLNN layer organizations. The benefits of structured data and expertise descriptions were recognized before the recent increase in interest in DLNNs. This definition is widespread in the physical sciences where the proposed method is popular for both specific theoretical structures and complicated system implementations in practice.
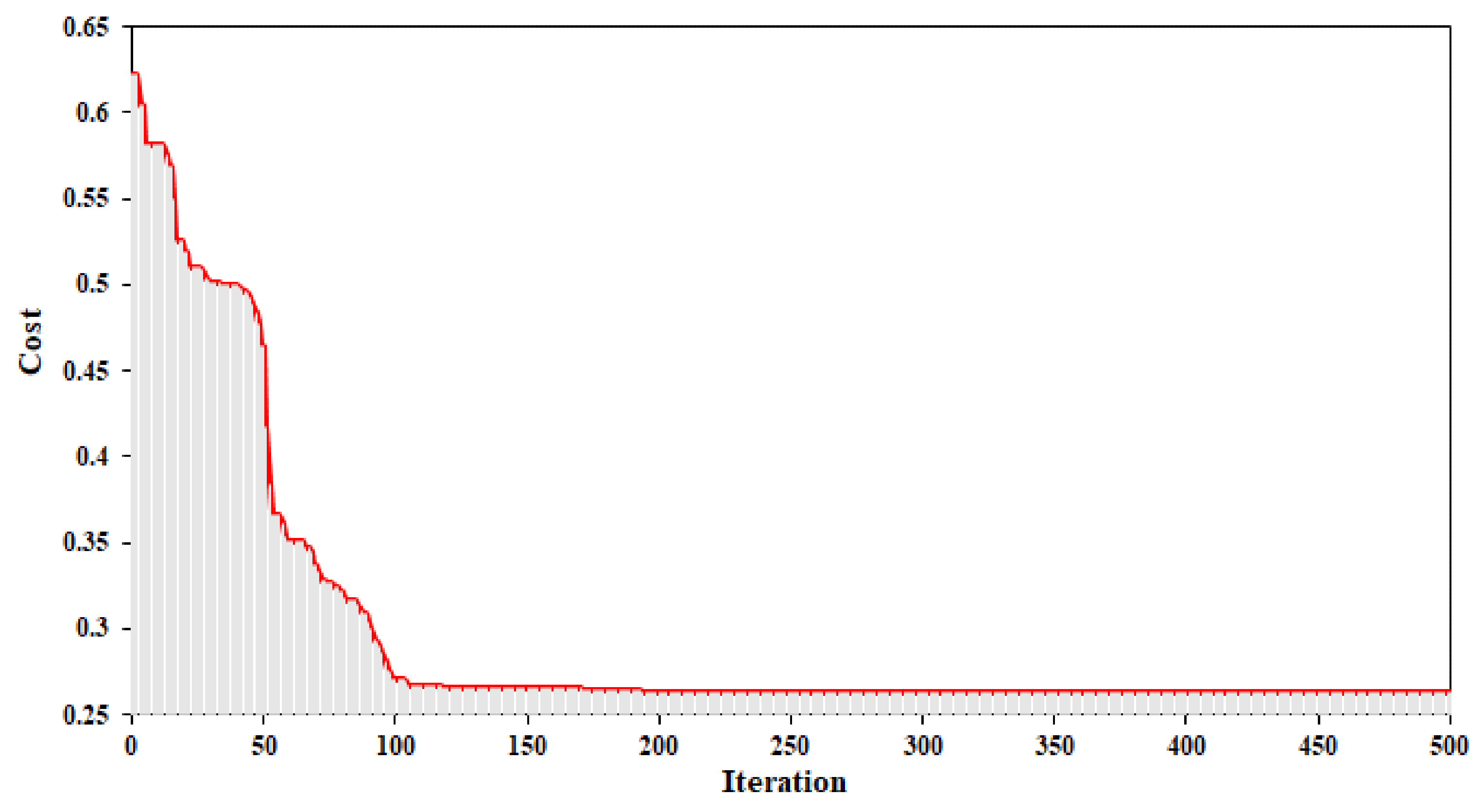
First, PSO produces an arbitrary solution and then discovers accurate solutions with an incremental optimum fitness attribute. This type of methodology has already been used primarily for backpropagation (BP) genetic algorithms, due to the efficiency of simple installation, fast response, and accuracy of predictions. It also demonstrated dominance in the resolution of complex applications and was initially implemented in the context of DL. The best function of the PSO algorithm is to combine various particles that are interlinked to each other to achieve an optimum position. The same technique indicates the position, velocity, and highest accuracy of each particle, which are dictated by the basic concepts used to enhance the problem. Particularly in comparison to other optimization algorithms, the advantage of the PSO algorithm is that the PSO technique usually involves a quick and important search procedure, is easy to perform, and can find the globally optimal path that is closest to the concrete ideas.
 ,
, 

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}