Cherry Tomato Production in Intelligent Greenhouses—Sensors and AI for Control of Climate, Irrigation, Crop Yield, and Quality


Abstract
:
1. Introduction
2. Materials and Methods
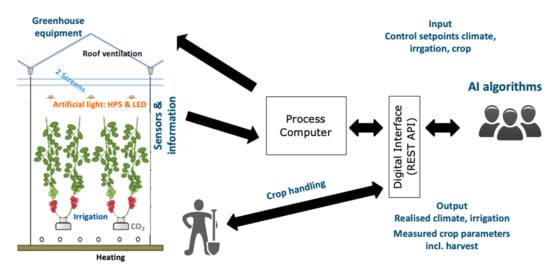
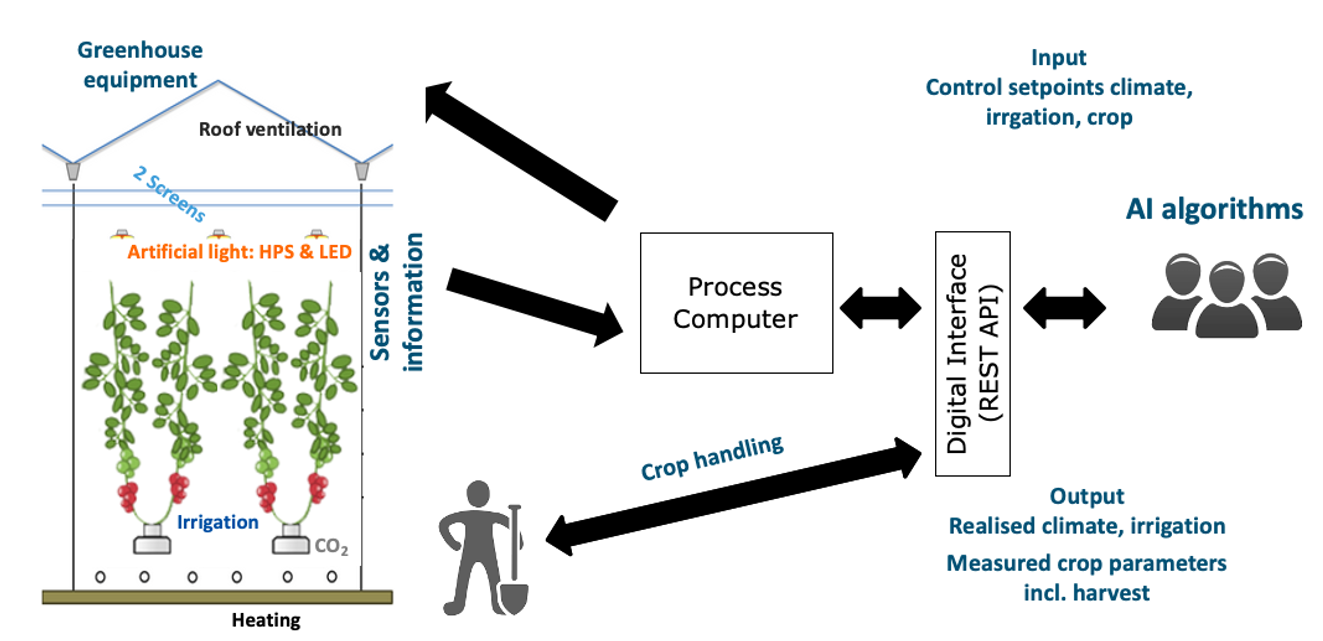
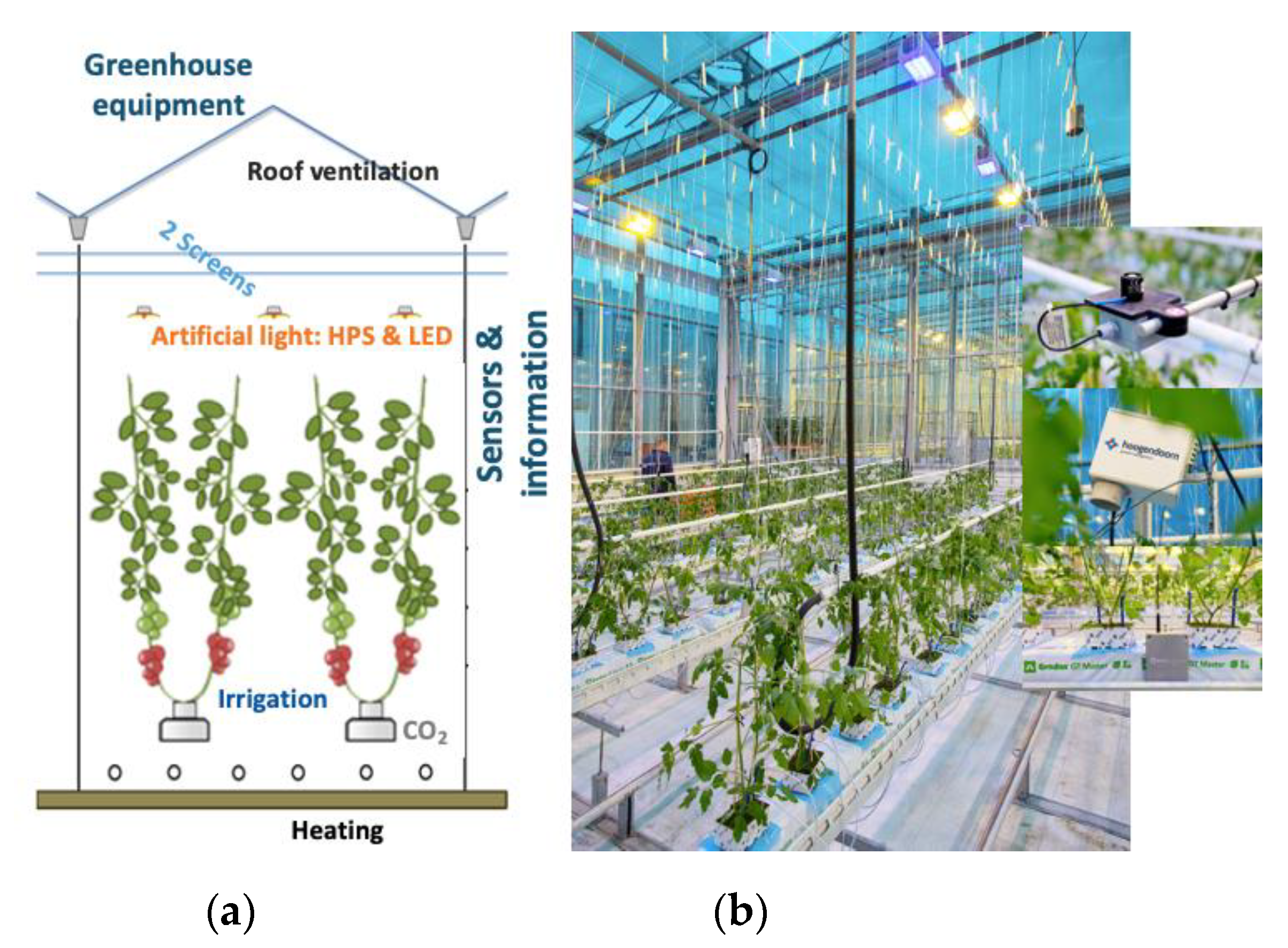
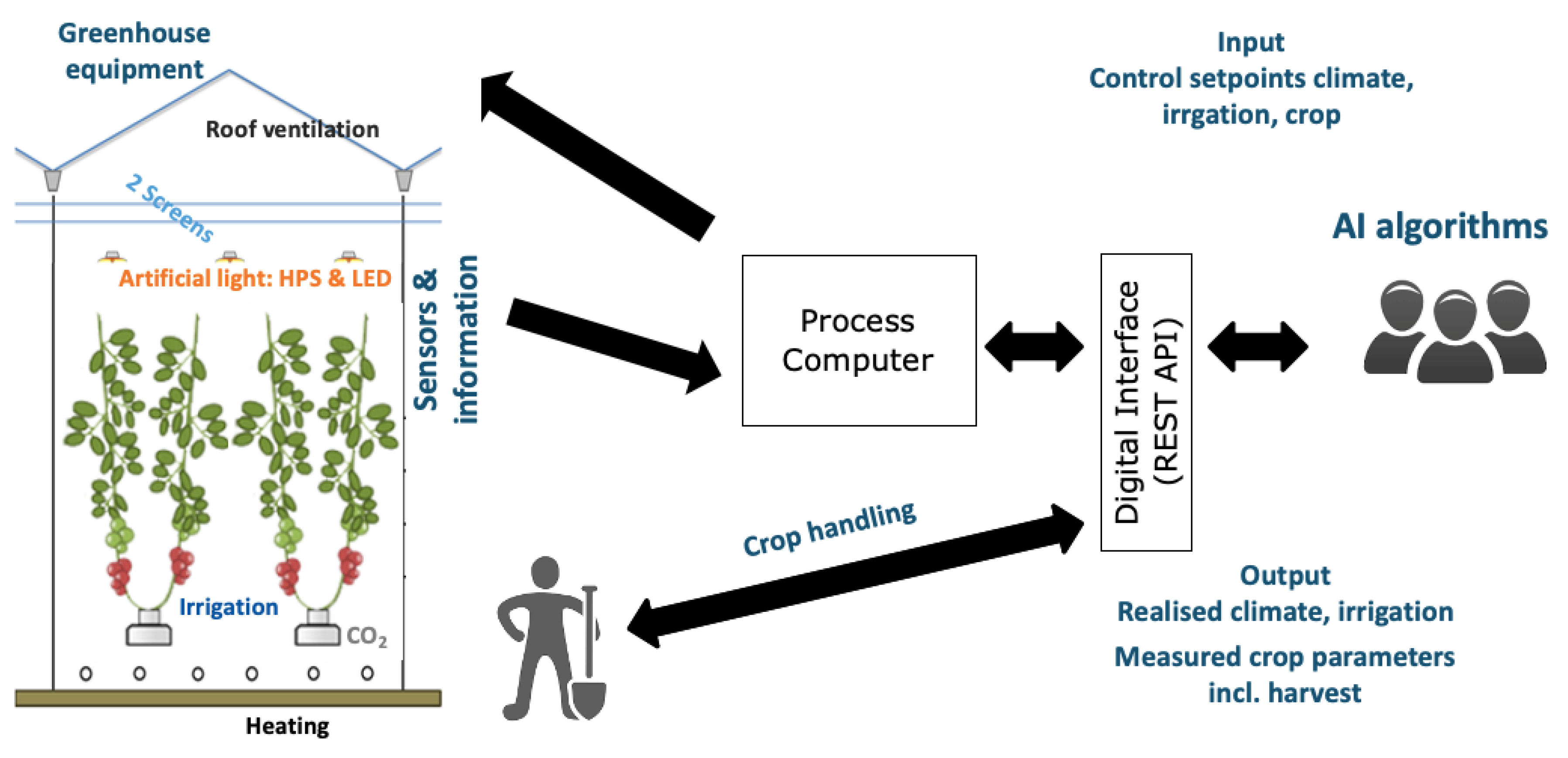
2.1. Greenhouse Compartments and Equipment
2.2. Greenhouse Control
2.3. Sensors
- Sensors monitoring outside weather parameters: cumulative outside global radiation (J/cm2/d), outside photosynthetically active radiation PAR (μmol/m2/s), air temperature outside (°C), outside relative humidity (%), and wind speed (m/s);
- Outside weather forecast parameters: outside global radiation forecast (W/m2), outside air temperature forecast (°C), outside relative humidity forecast (%), and wind speed forecast (m/s);
- Sensors monitoring inside climate parameters and equipment status: lamp status (on/off) of both lighting systems (HPS and LED) and intensity of the four channels of LED lighting (0–100%), energy and black-out screen position (%), air temperature inside (°C), heating pipe temperature (°C), heating power used (W/m2) for both heating systems, air absolute humidity inside (g/m3), CO2 dosage (kg/ha/h);
- Sensors monitoring fertigation parameters and equipment status: irrigation supply amount (L/m2), drain amount (L/m2), drain EC (dS/m), and drain pH (−), EC in slab (dS/m), pH in slab (-), and temperature in slab (°C).
2.4. Crop
2.5. Resource Use Efficiency
2.6. Economics
2.7. Performance Analysis
3. Results
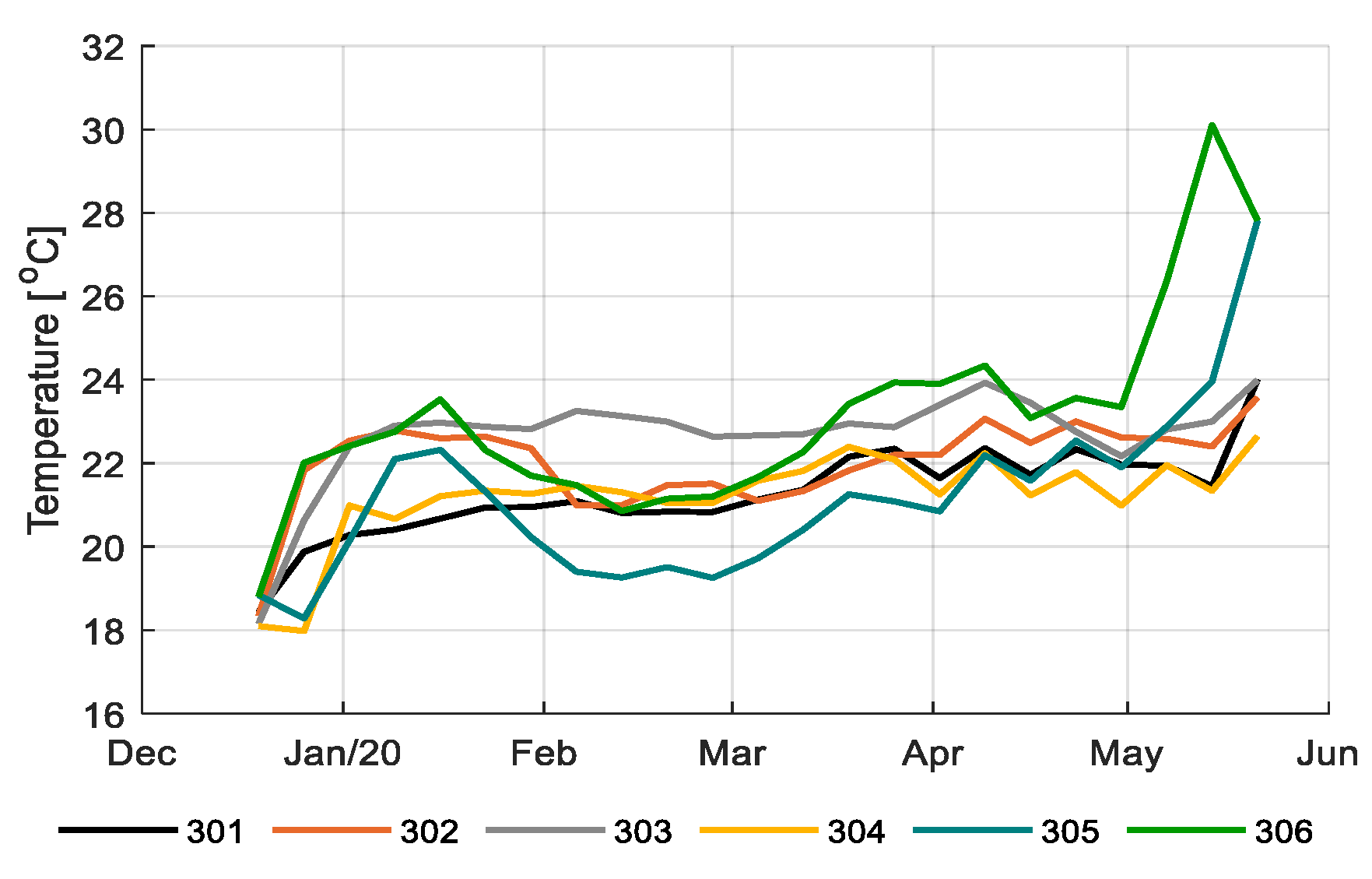
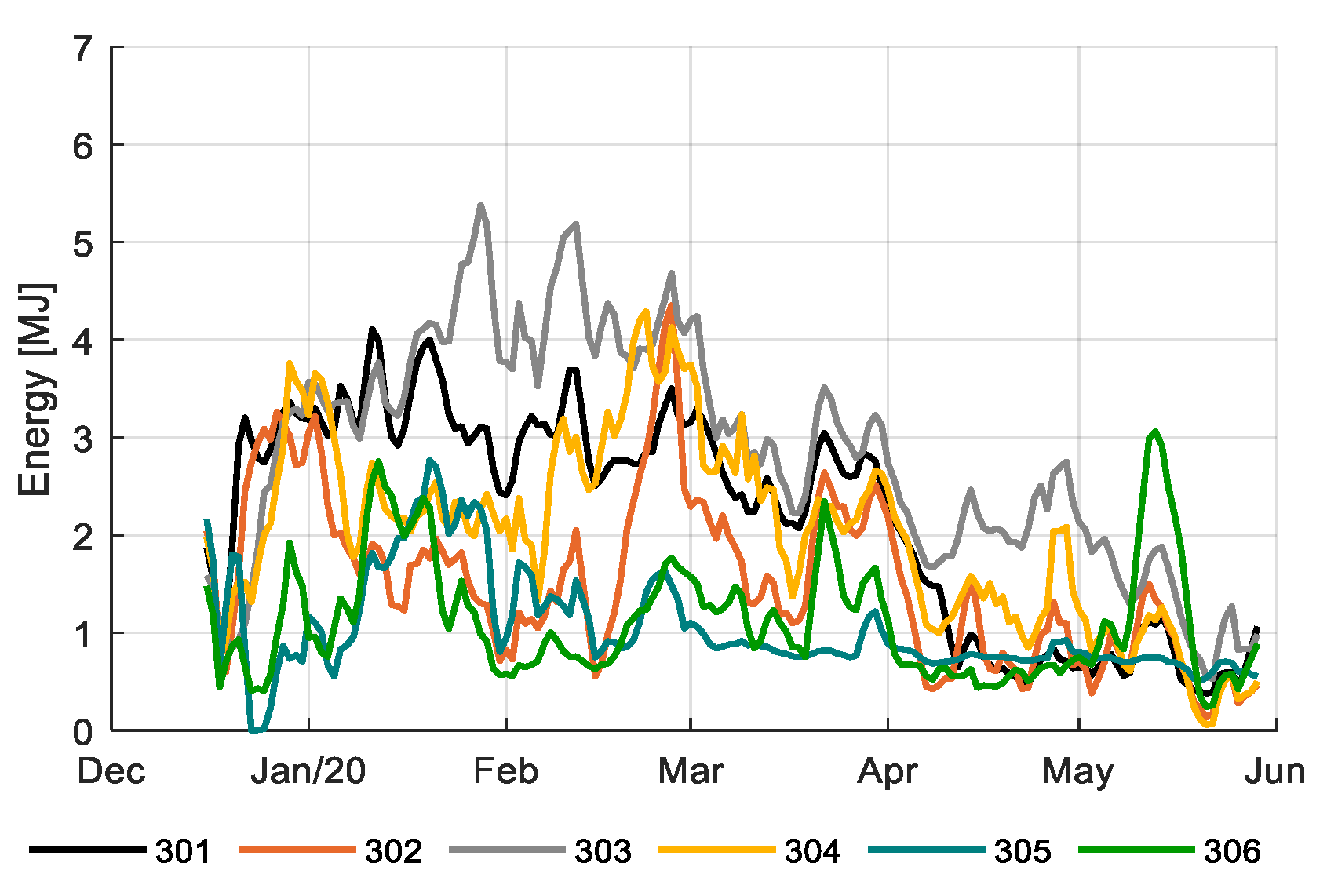
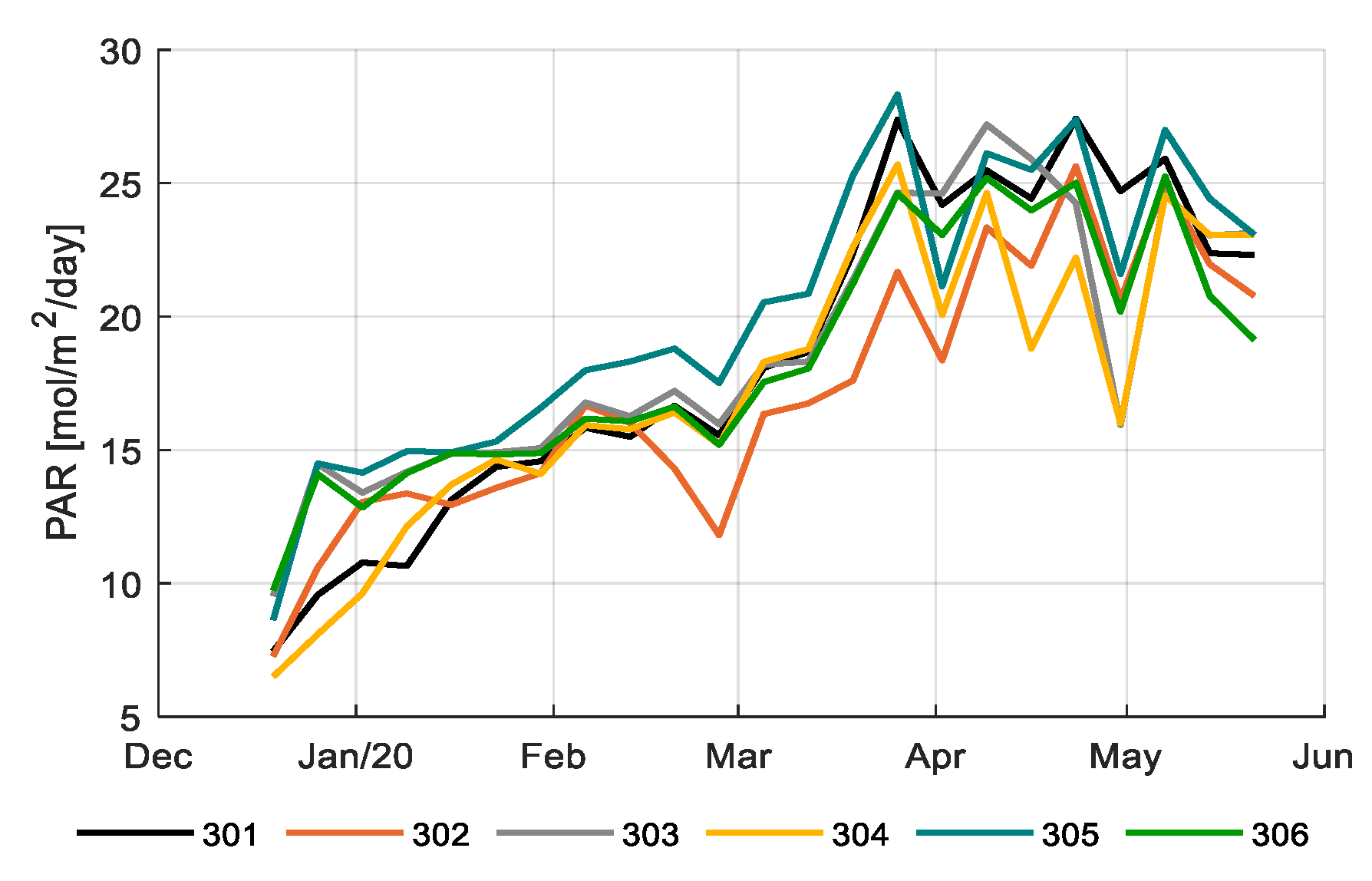
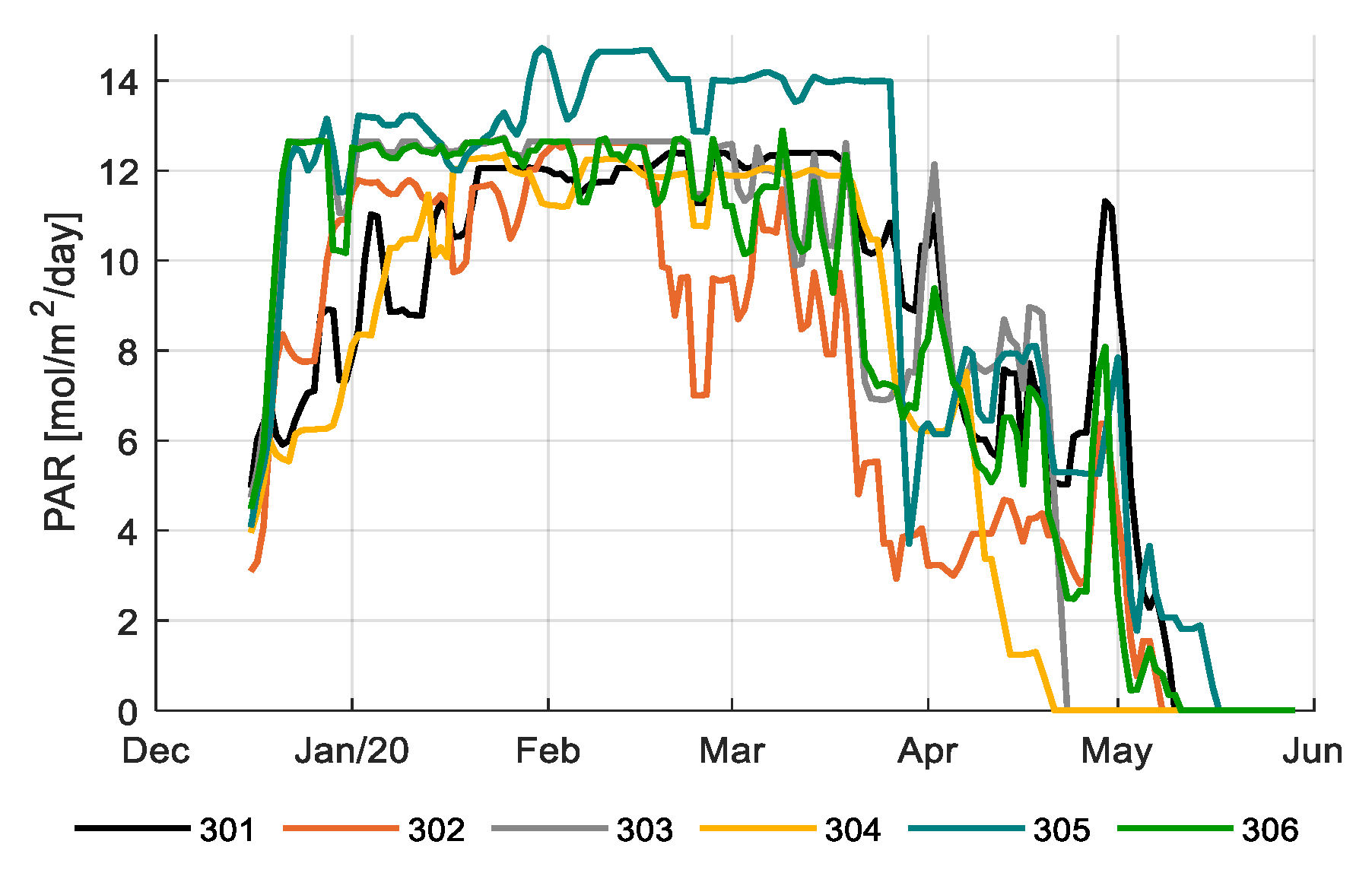
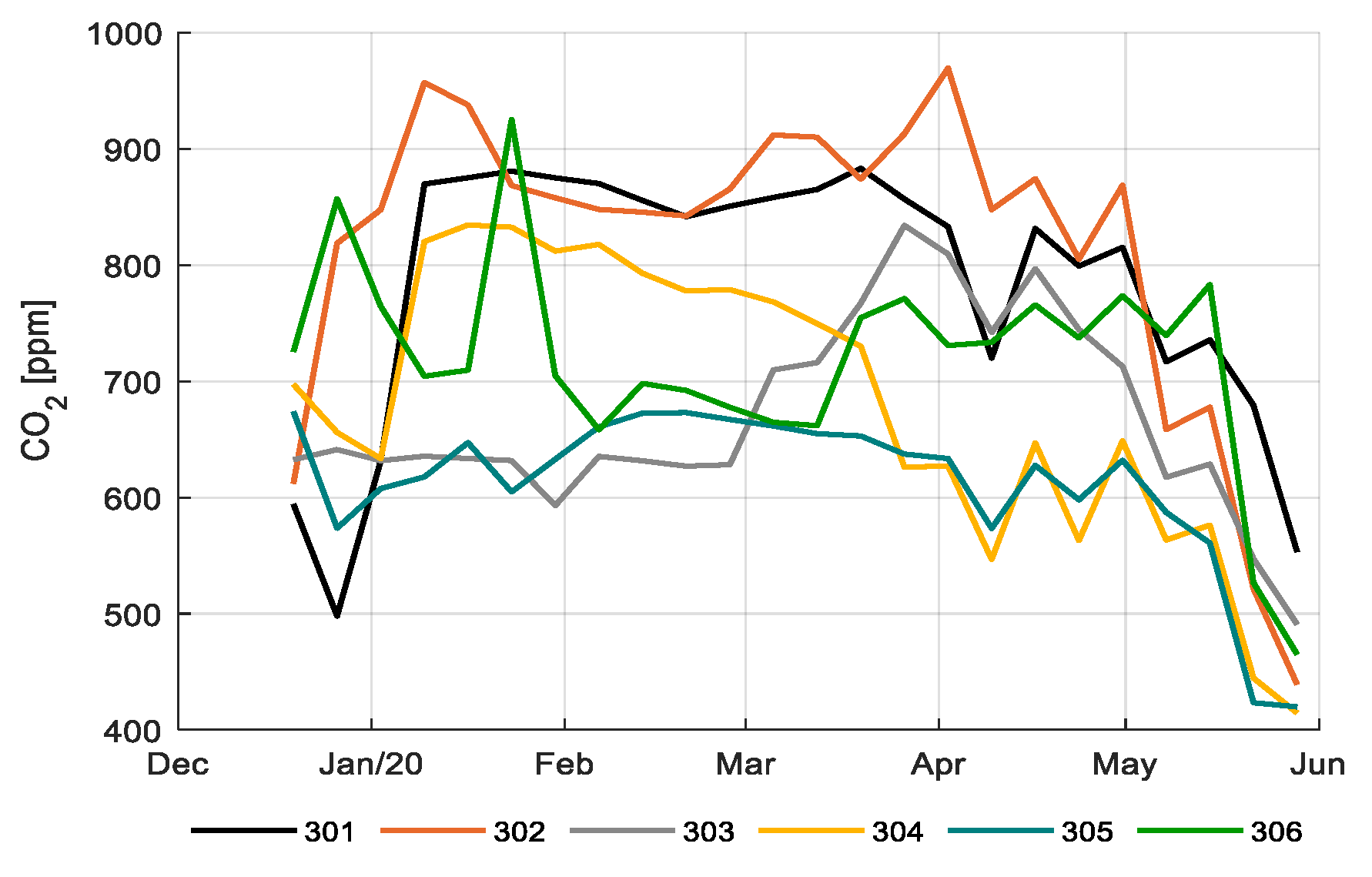
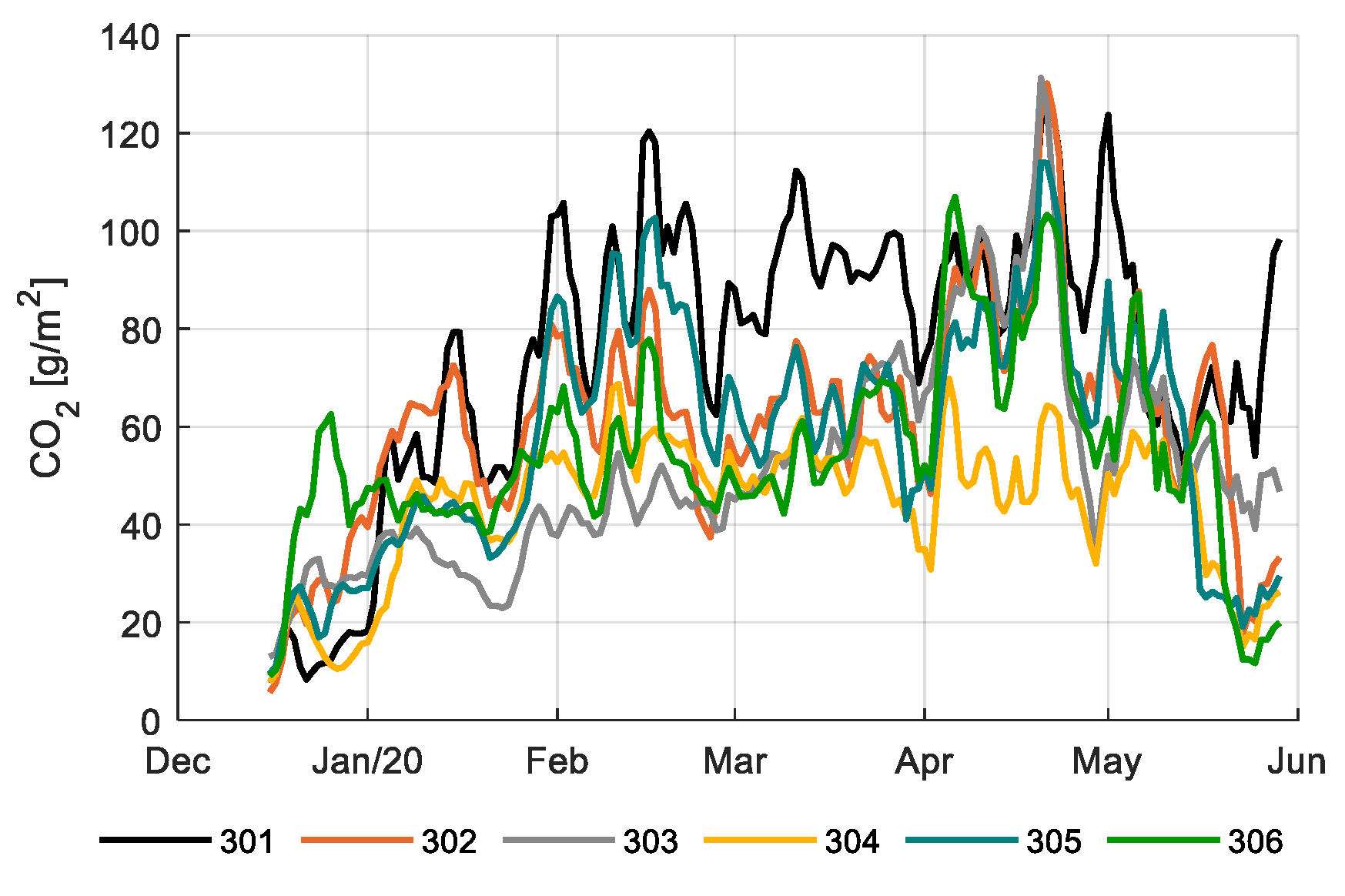
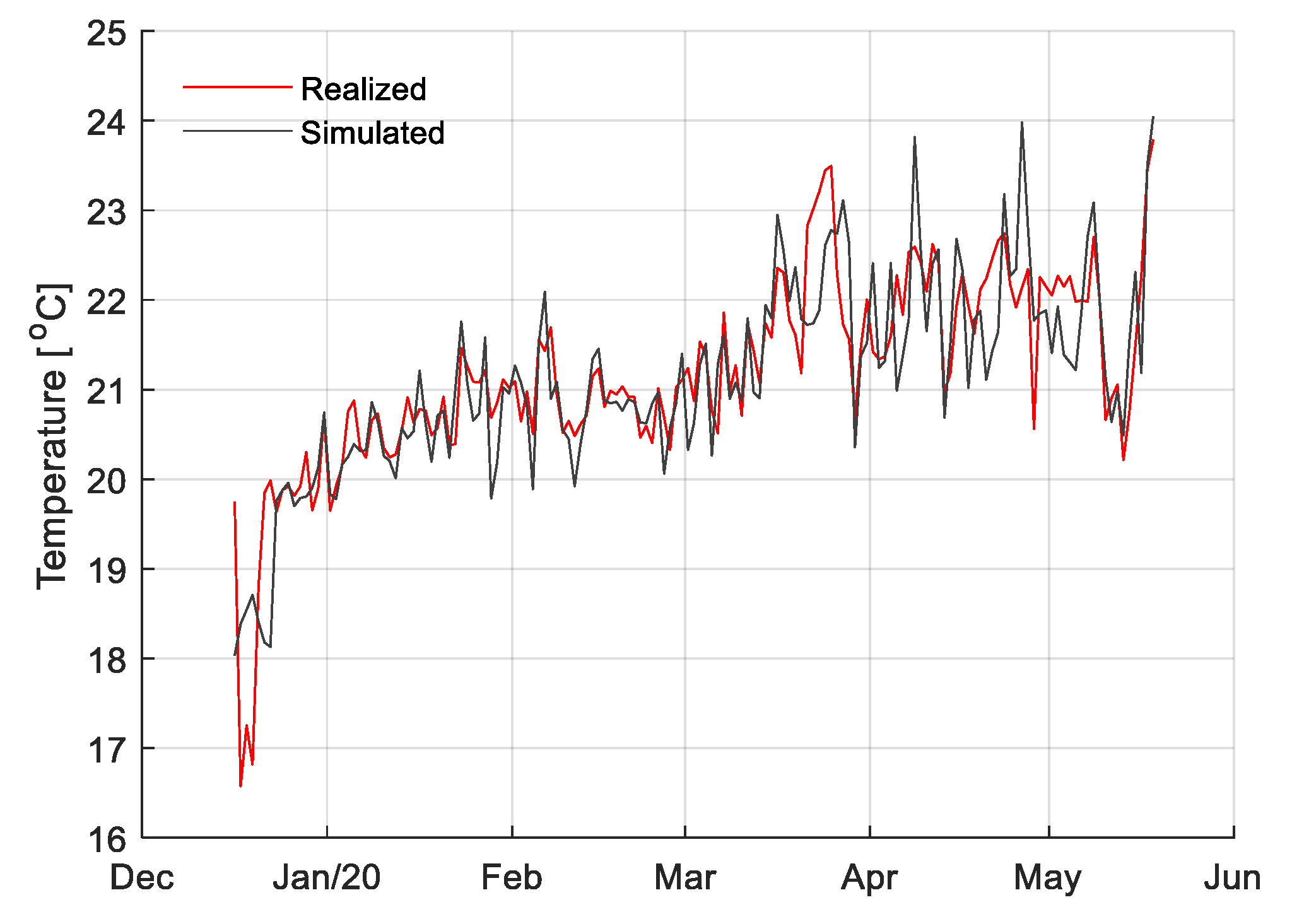
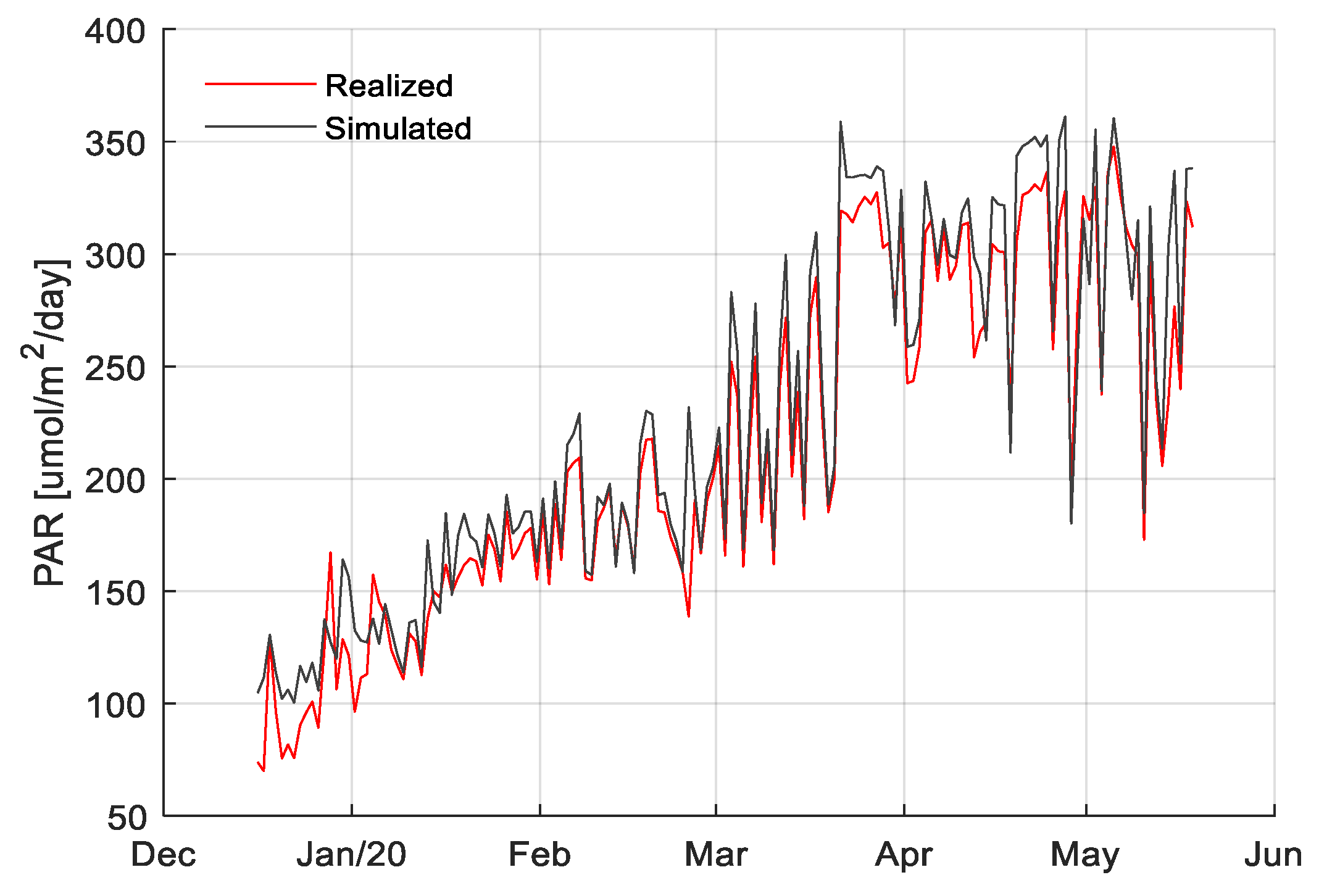
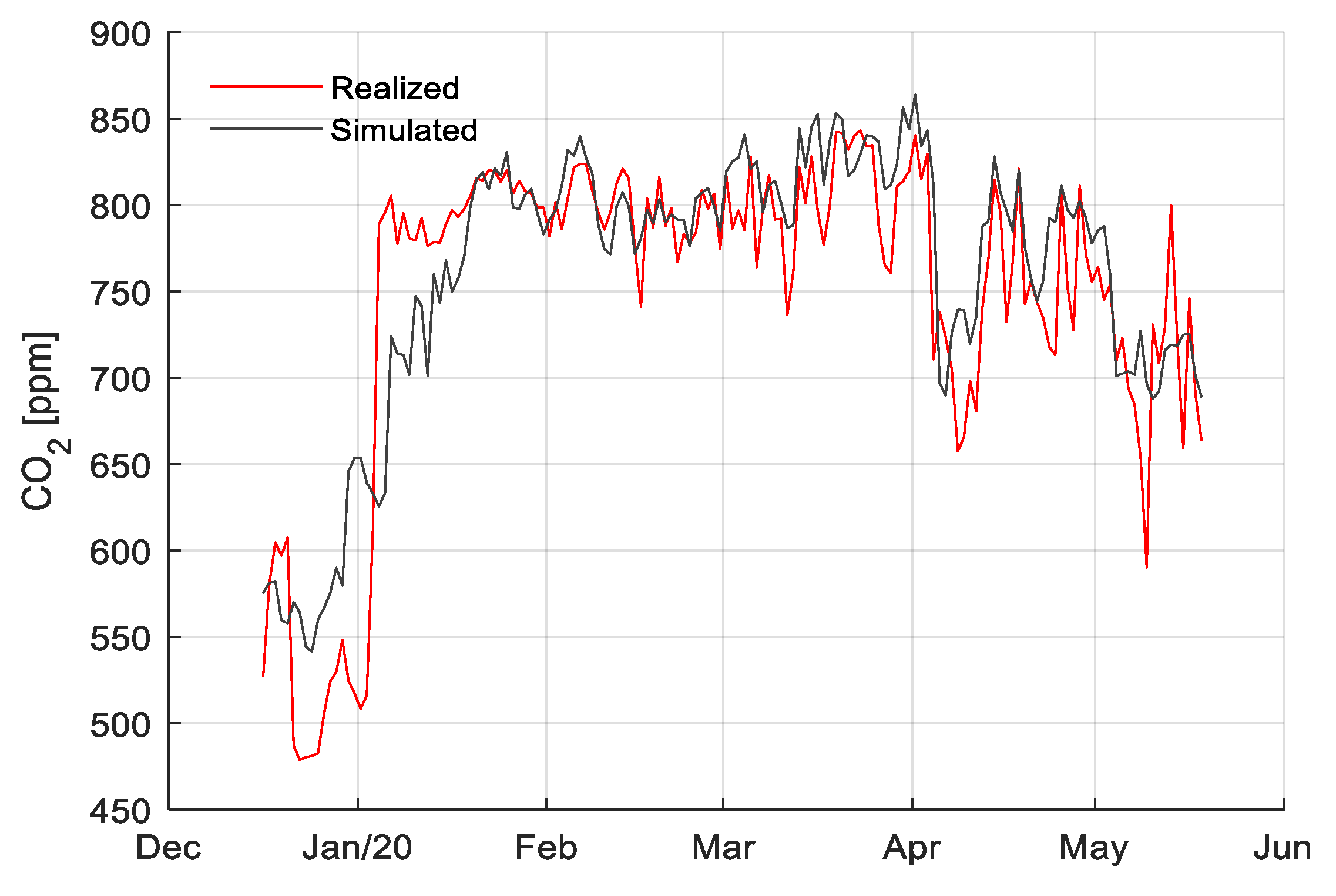
3.1. Climate Strategies
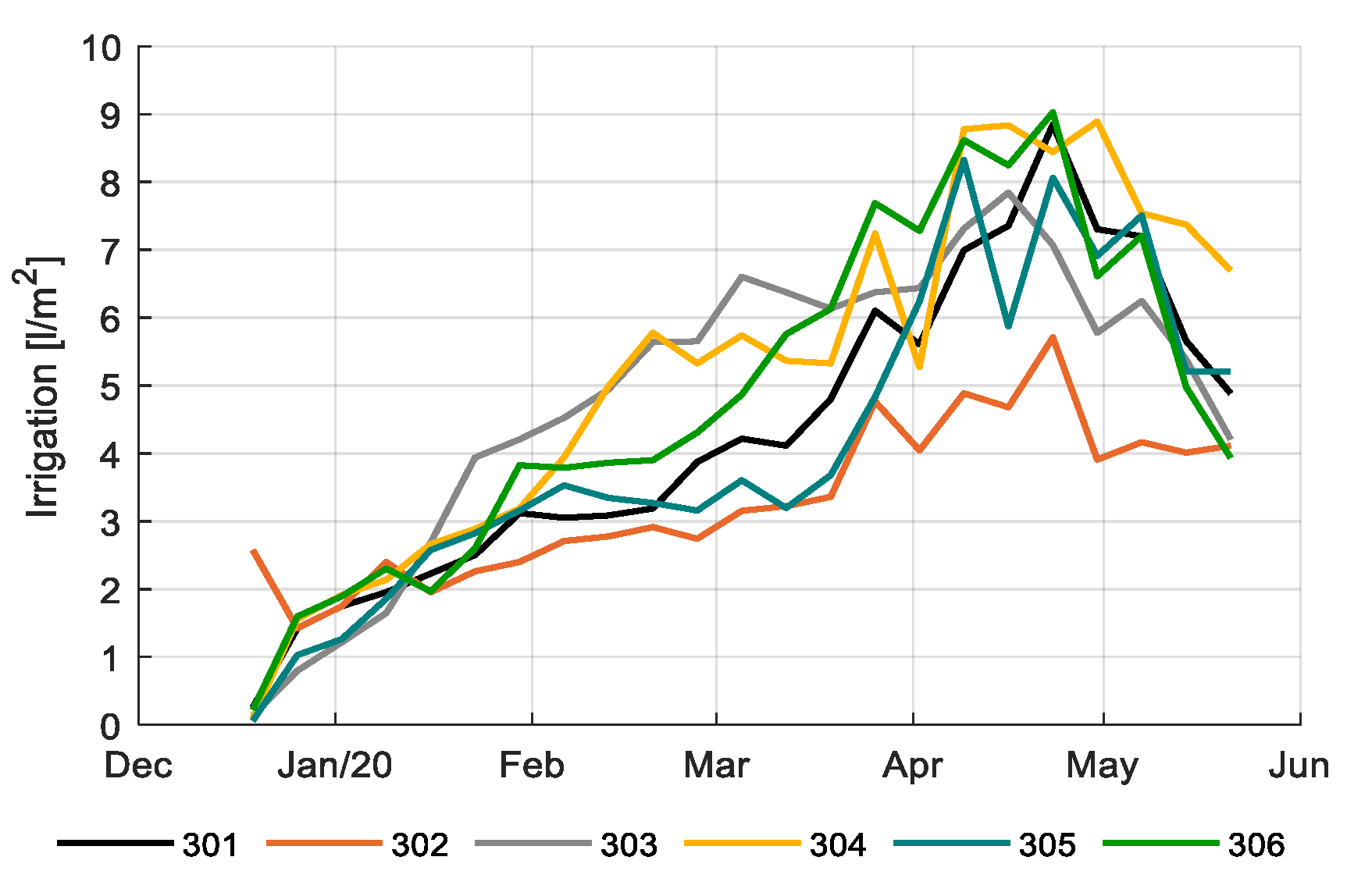
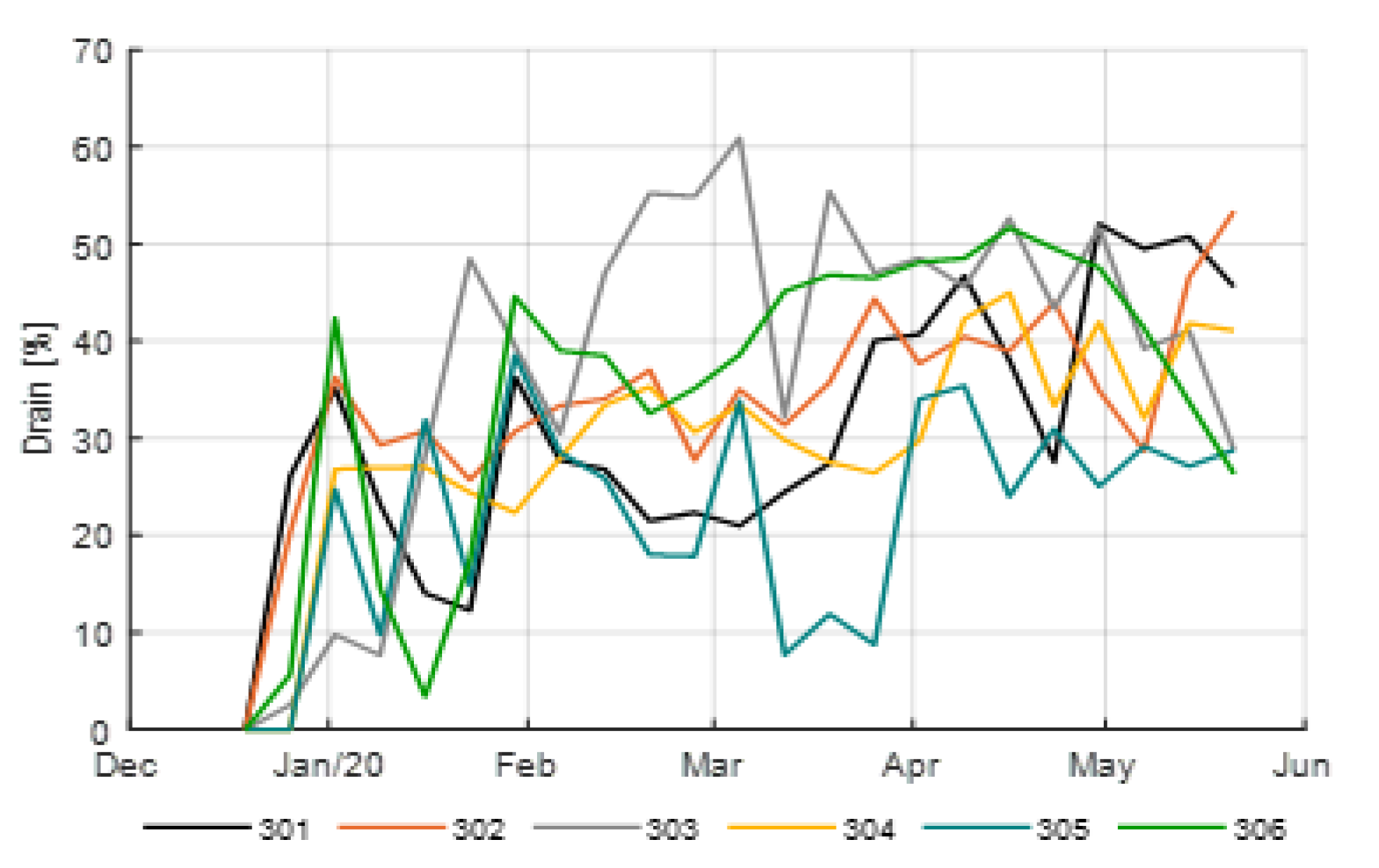
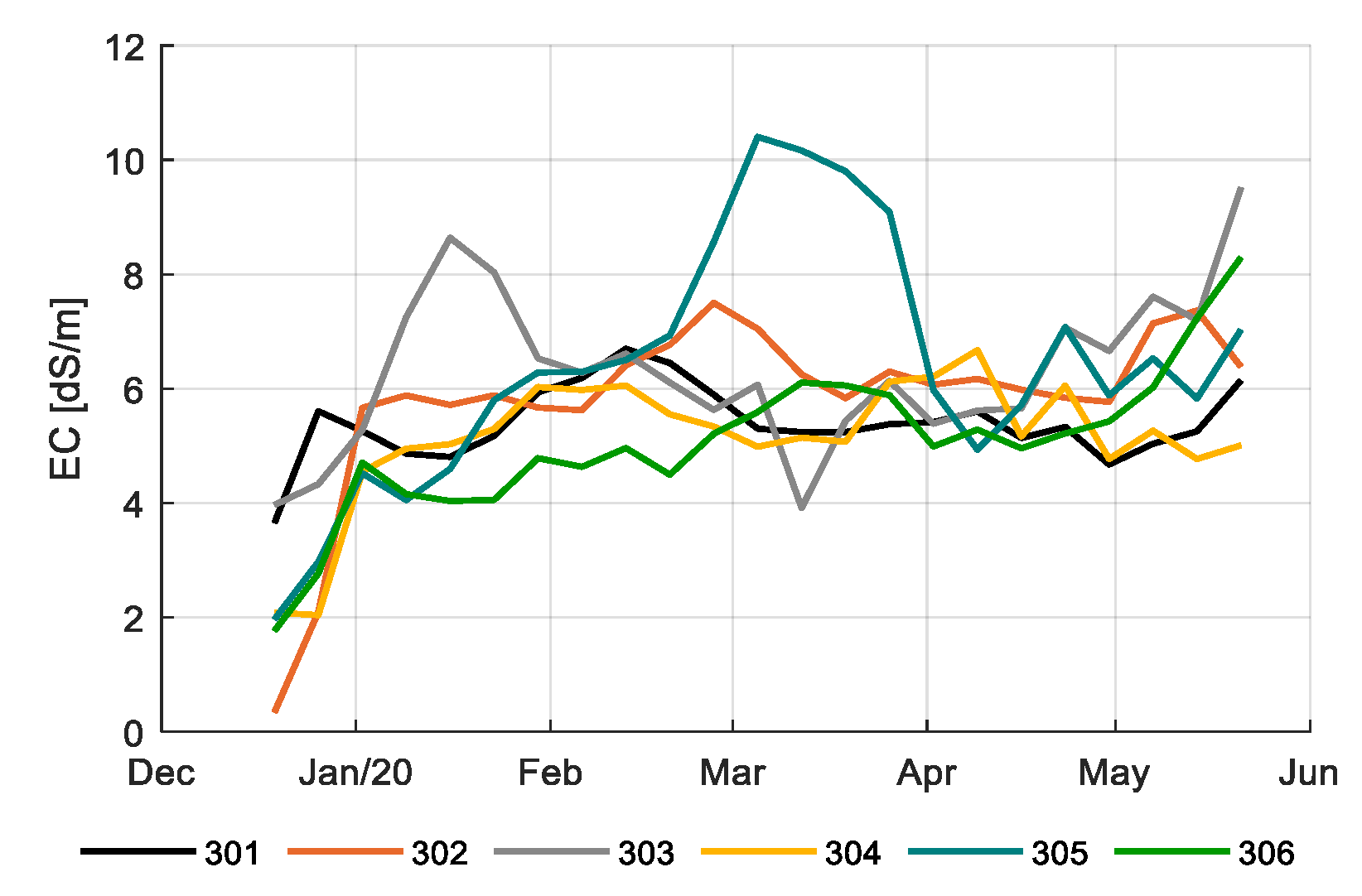
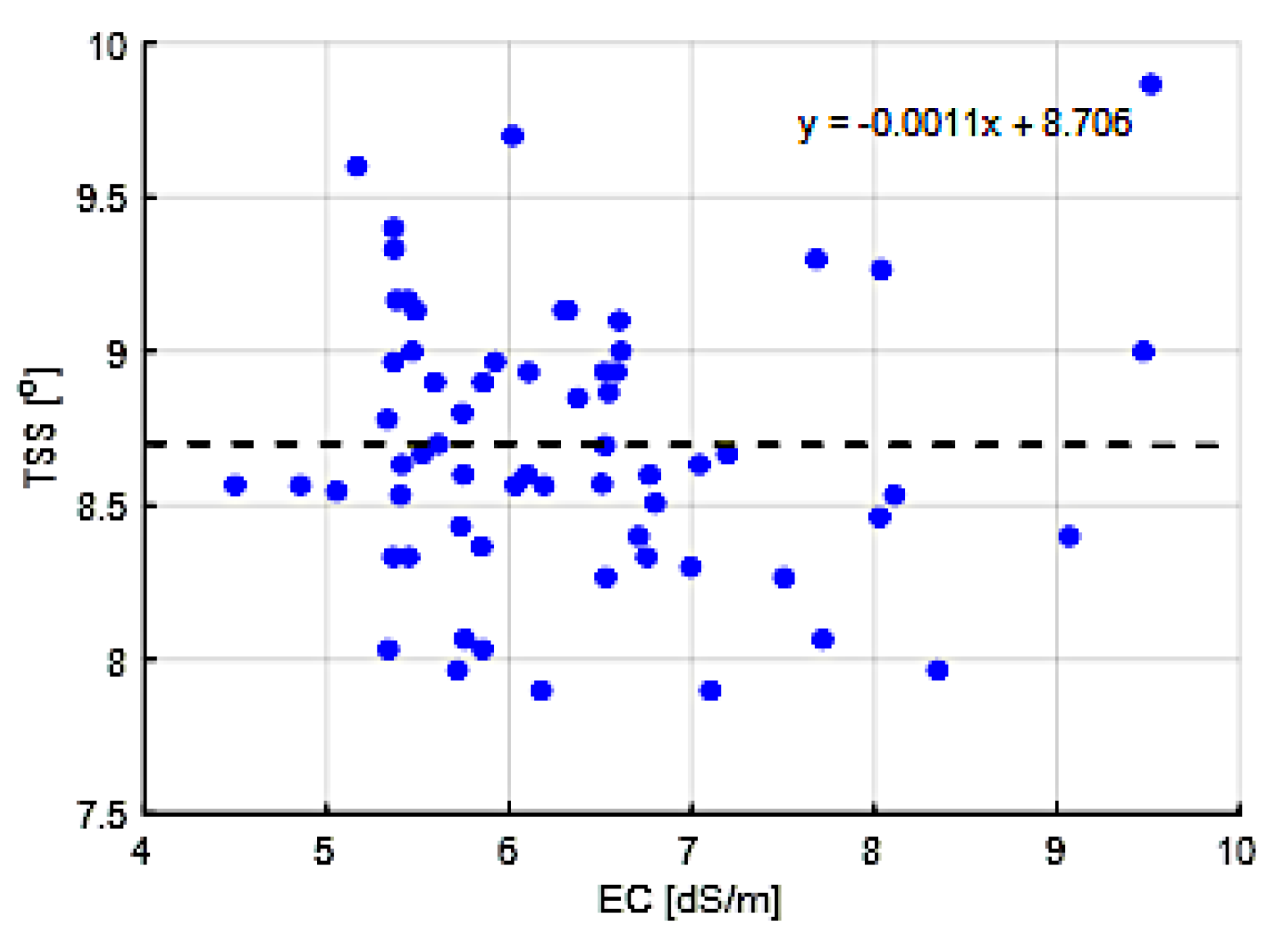
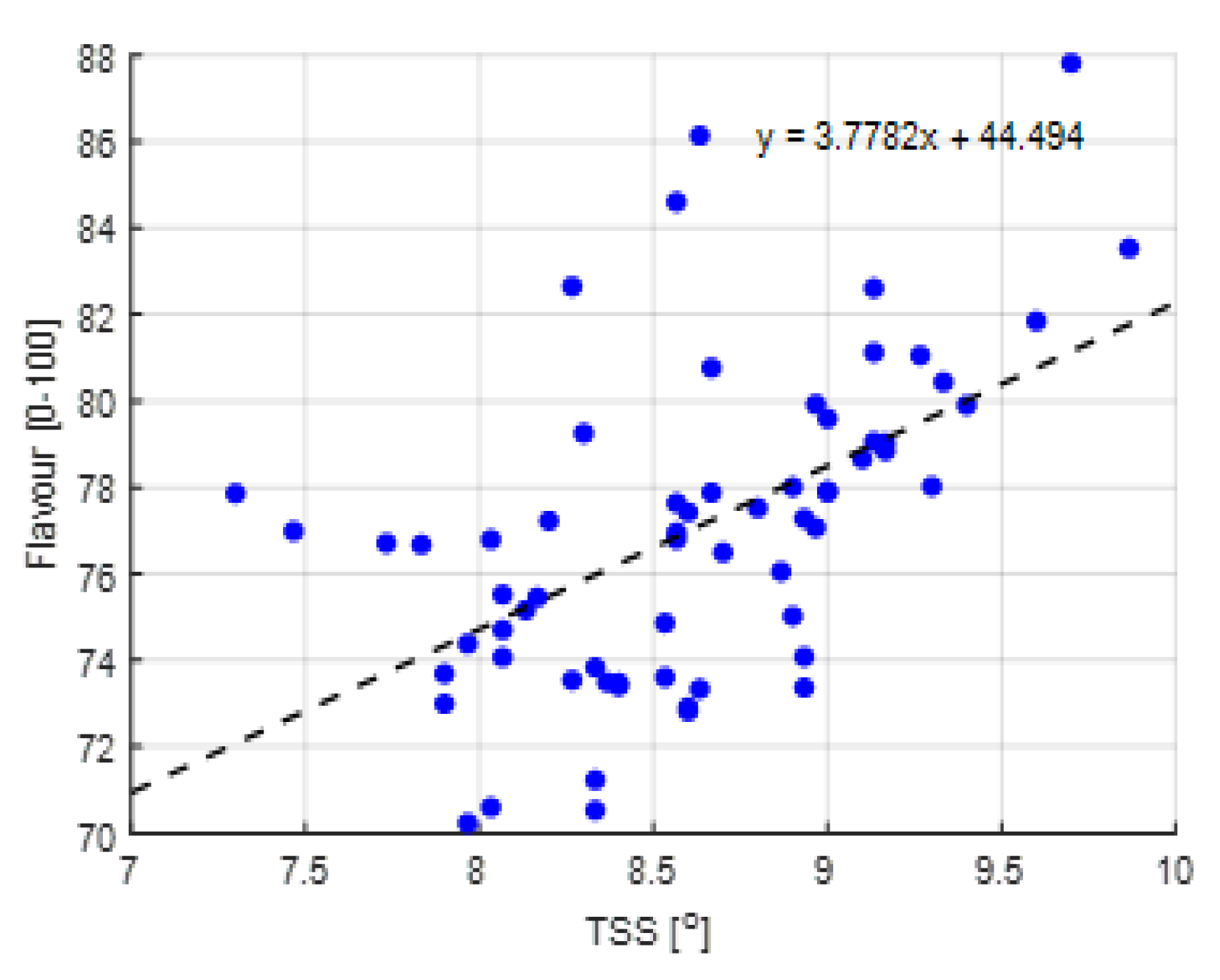
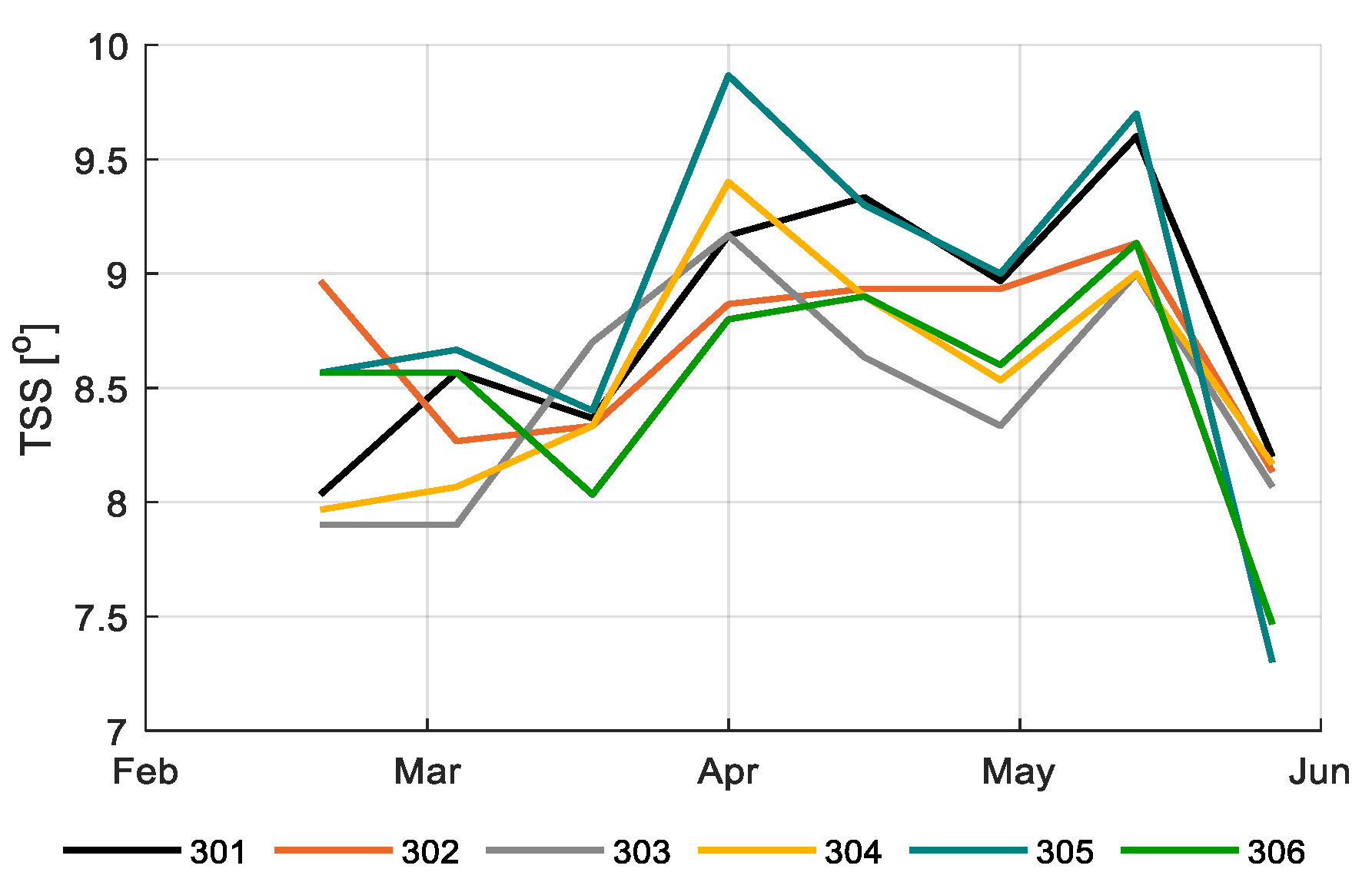
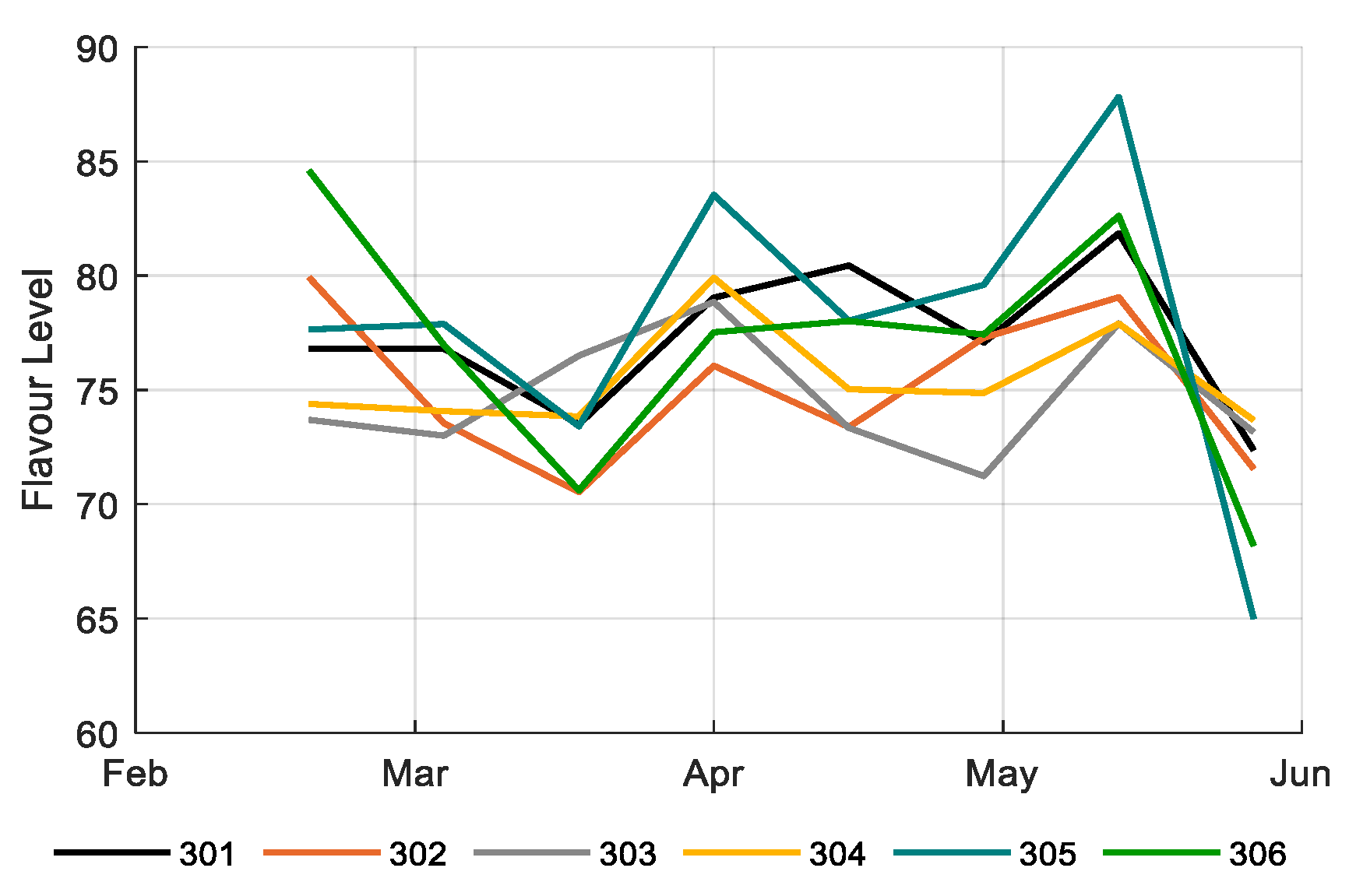
3.2. Irrigation Strategies and Fruit Quality
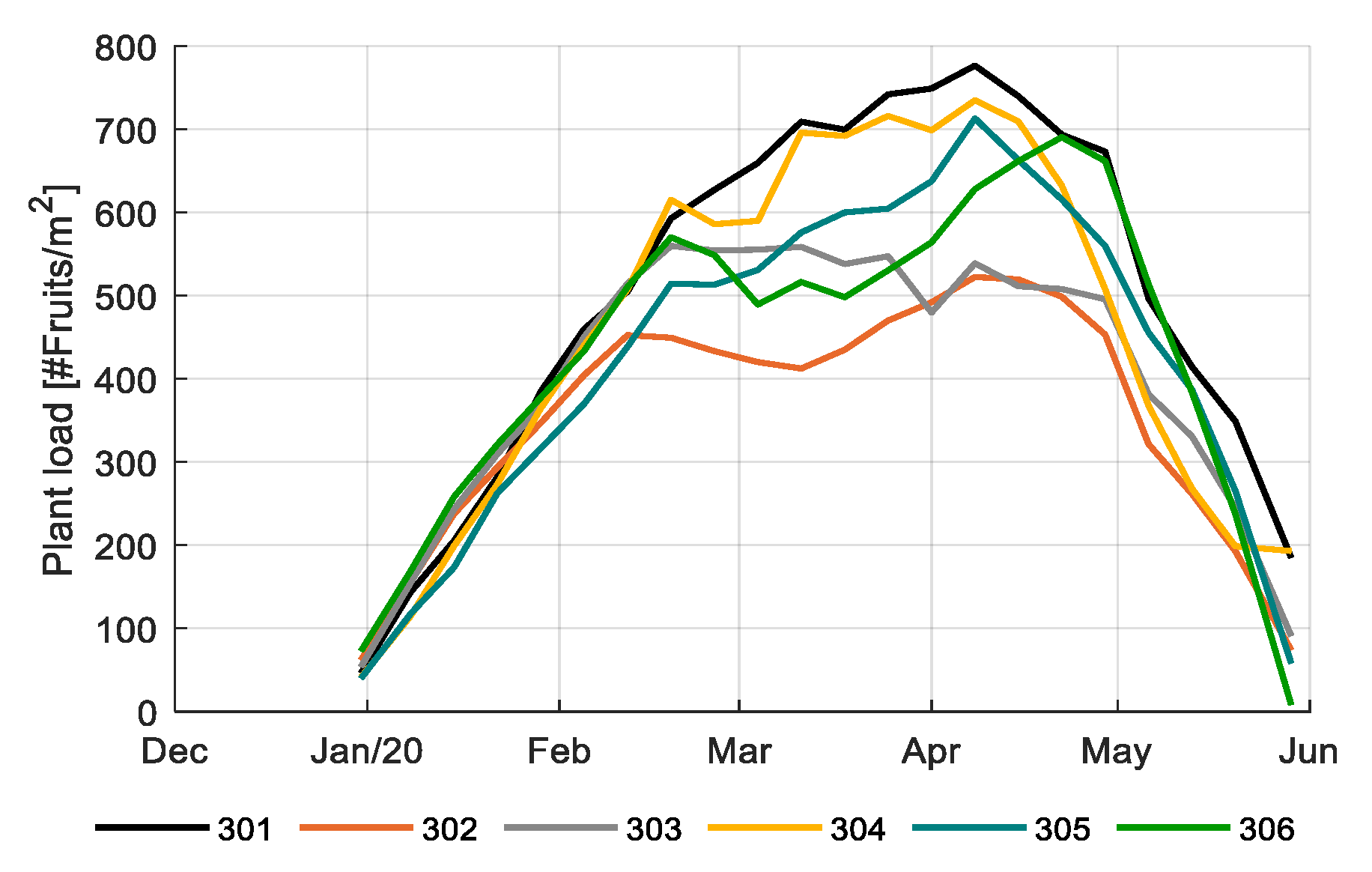
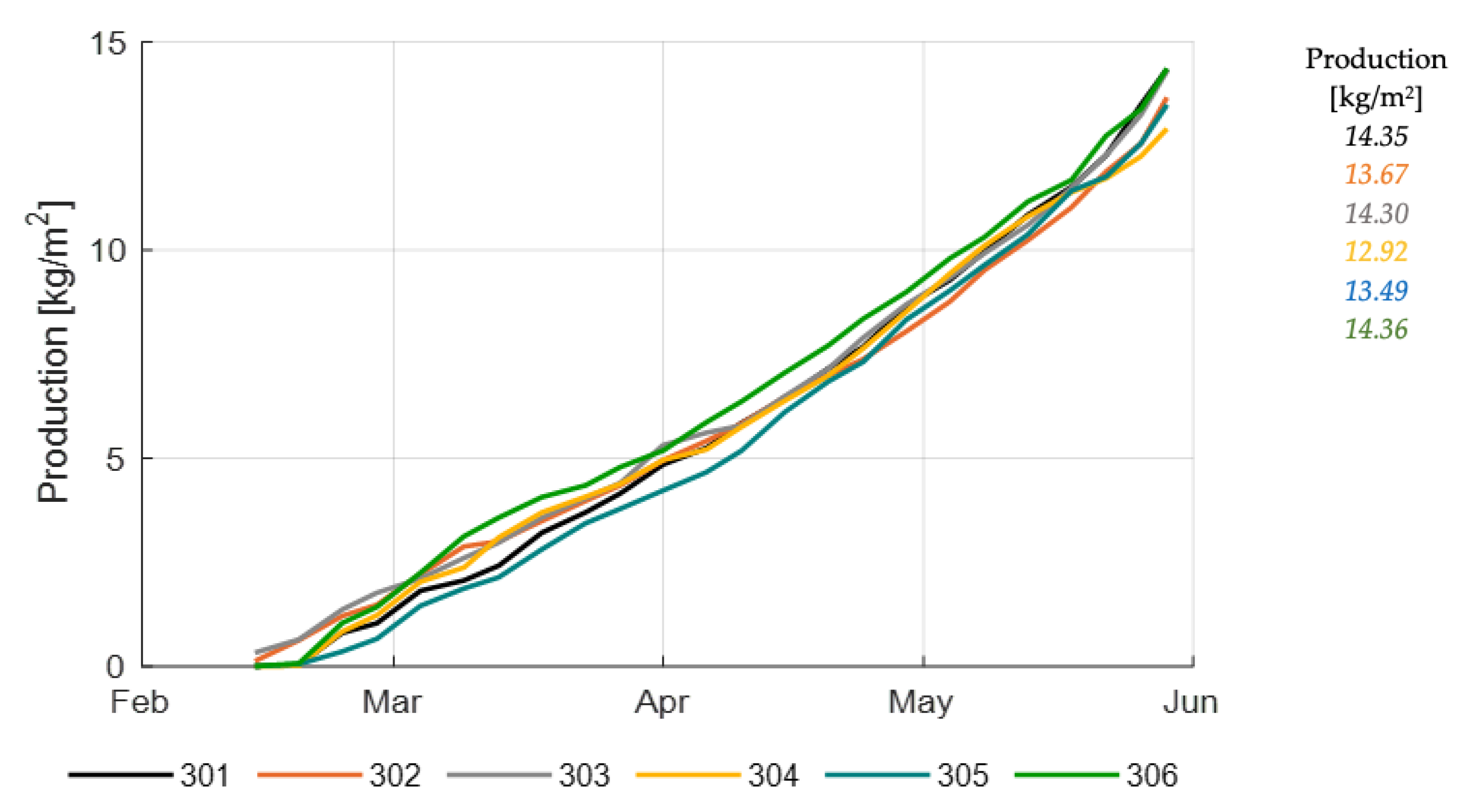
3.3. Crop Strategies and Production
3.4. Resource Use Efficiency
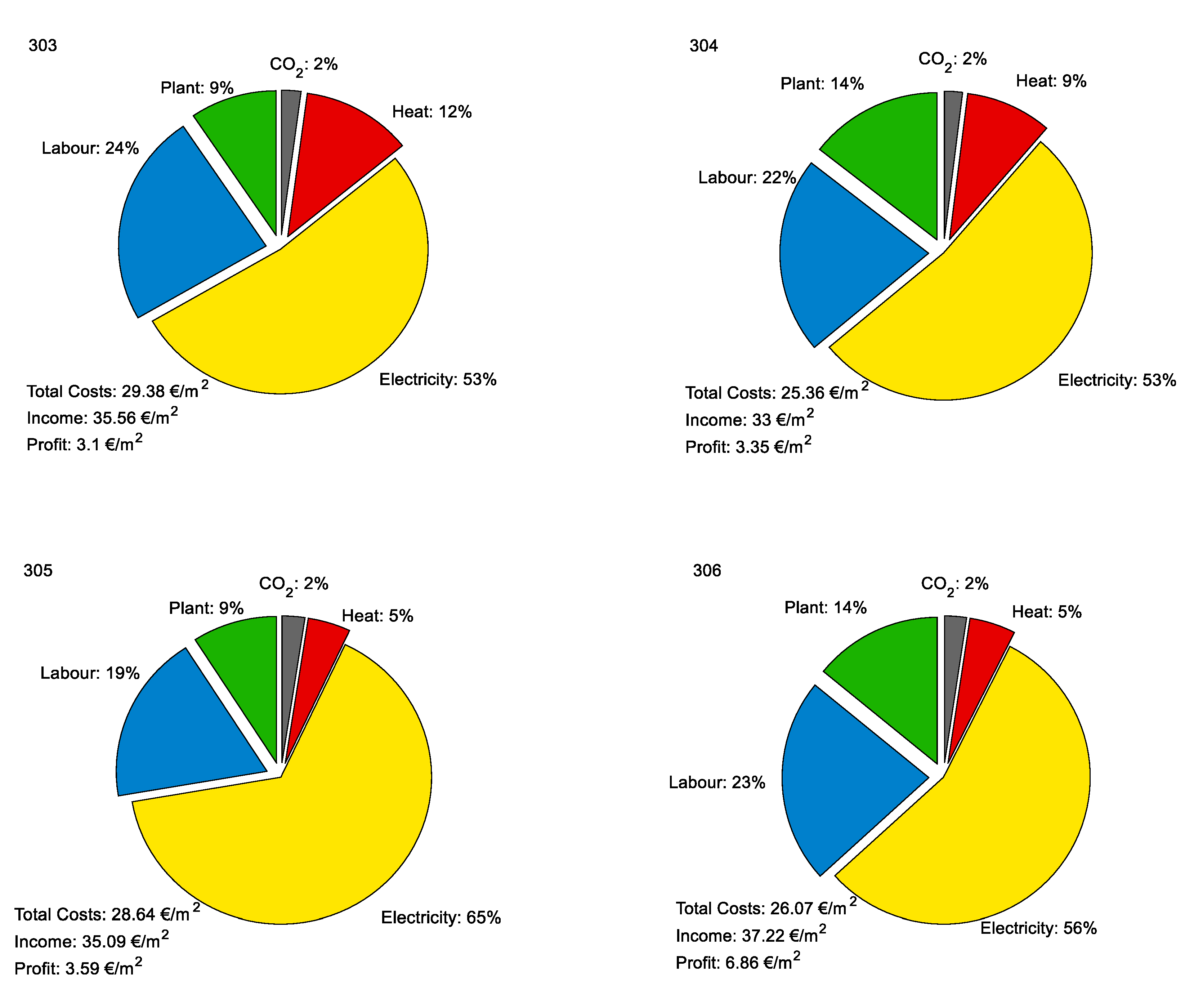
3.5. Economic Result
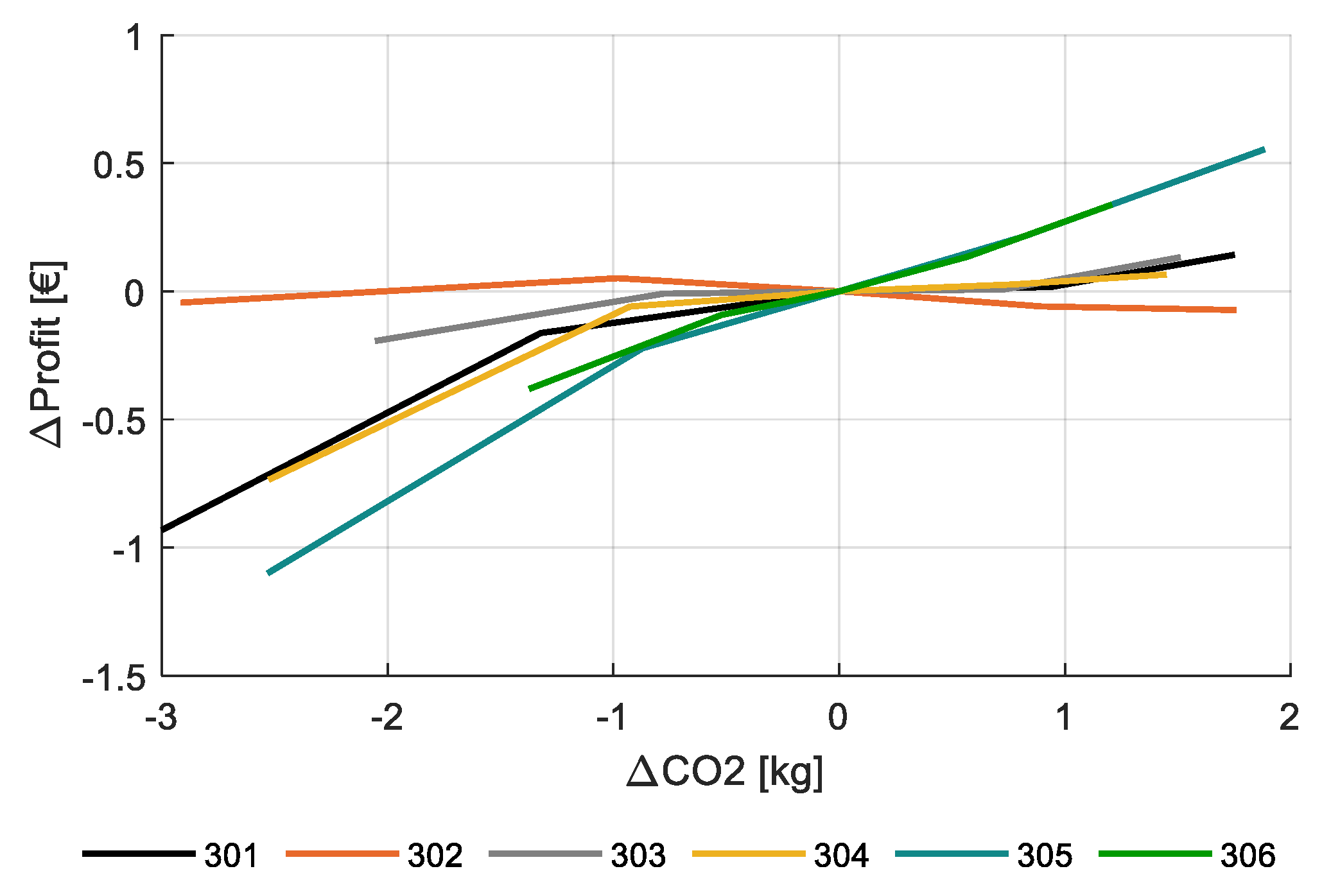
3.6. Performance Analysis
4. Discussion
4.1. Cropping Strategy
4.2. Sensors, Algorithms, and Control
5. Conclusions
- In the experiment described here all teams remotely controlling the greenhouse tomato crop production by AI outperformed the human reference growers.
- Crop management has been shown to be important for high (quality) production.
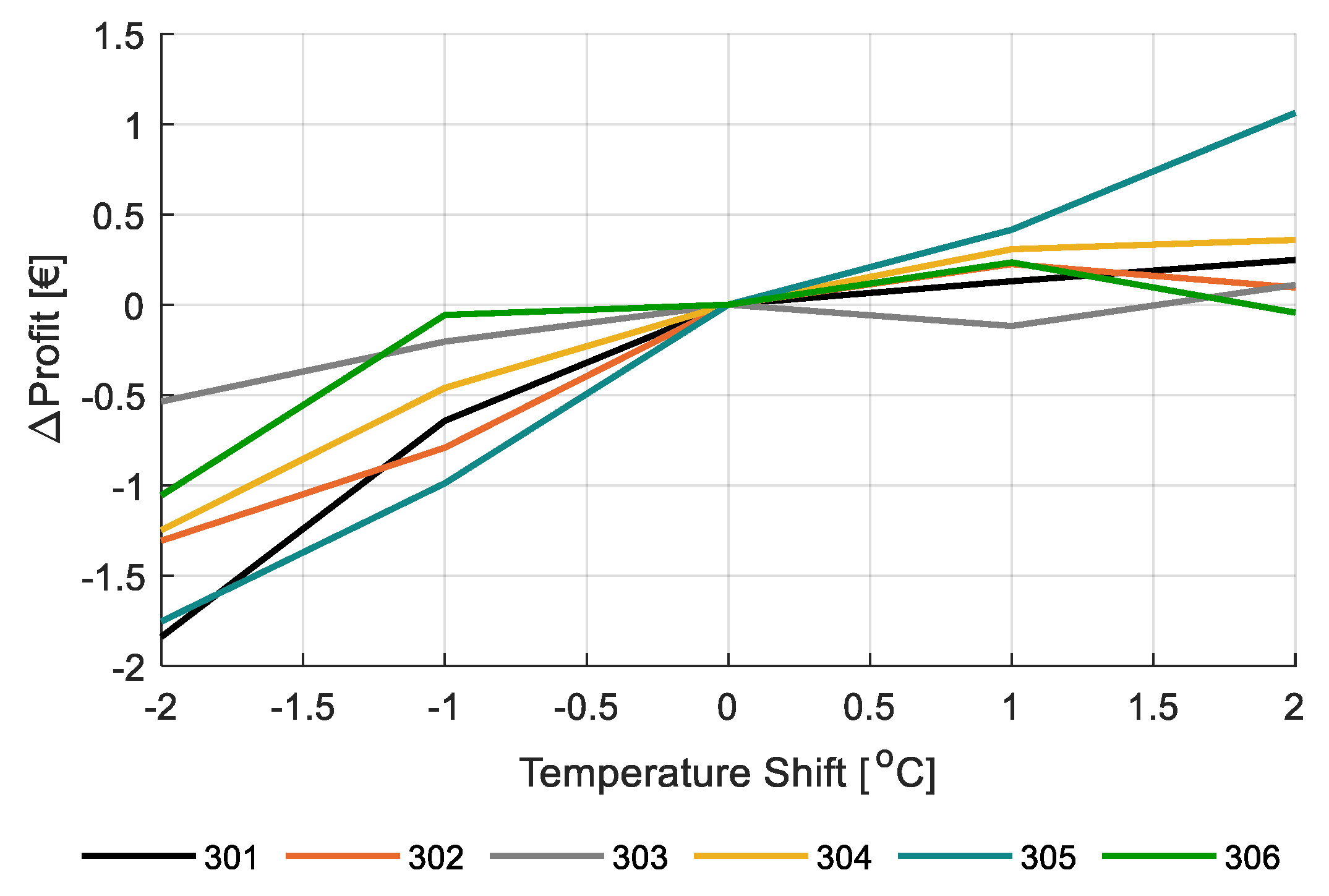
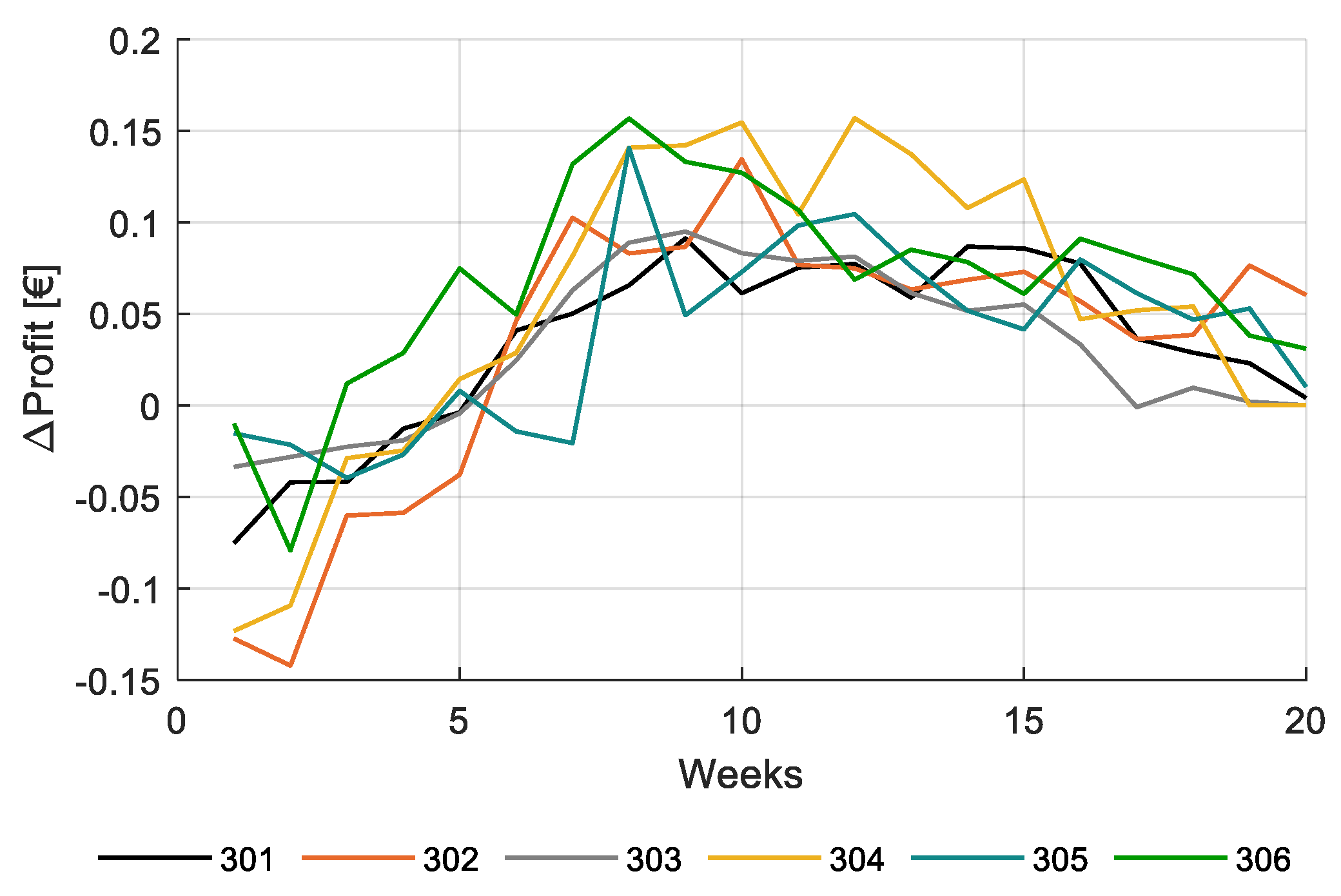
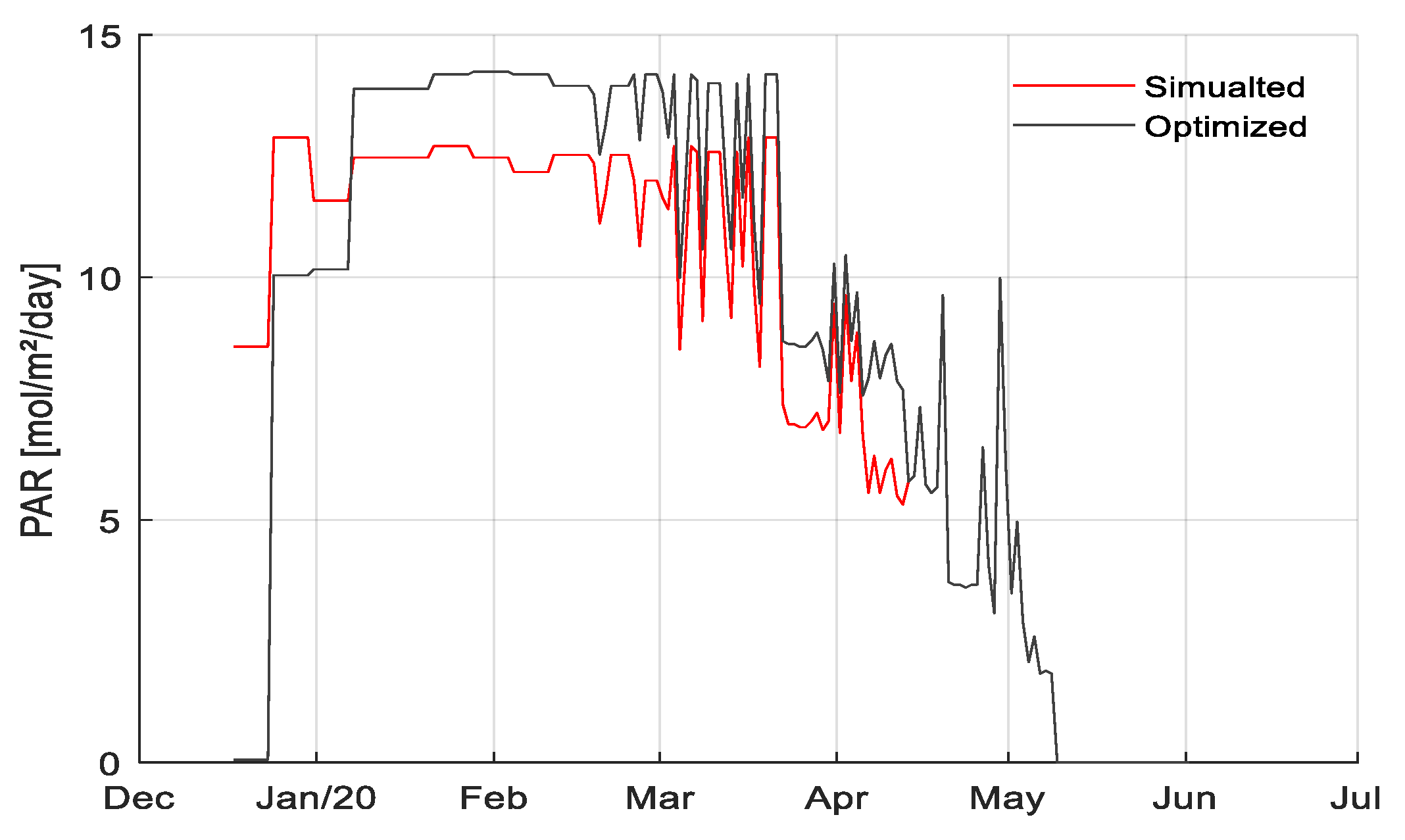
- Optimizing lighting strategies would have improved the production and net profit of the team with the best strategy more than optimizing CO2 or temperature.
- There are clear opportunities for autonomously control crop growth based on automated control of lighting, CO2, temperature, and source-sink balance of the crop.
- Objective is data needed on all aspects of growing since the lack of data hampers further development of AI and/or optimum control strategies.
- Objective data can be obtained by specific crop sensors, especially the further development of robust camera’s and computer vision algorithms to detect crop specific parameters (e.g., plant load) seem to be interesting to improve in the future for fully autonomous growing.
- The last step towards fully autonomous growing would be to automate also all crop handling, more development on robotics would be needed for that (not part of this research).
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A










References
- Stanghellini, C. Horticultural production in greenhouses: Efficient use of water. Acta Hortic. 2014, 1034, 25–32. [Google Scholar] [CrossRef]
- Graamans, L.; Baeza, E.; Dobbelsteen, A.; van den Tsafaras, I.; Stanghellini, C. Plant factories versus greenhouses: Comparison of resource use efficiency. Agric. Syst. 2018, 160, 31–43. [Google Scholar] [CrossRef]
- Rabobank. World Vegetable Map 2018. RaboResearch Food & Agribusiness. Available online: https://research.rabobank.com/far/en/sectors/regional-food-agri/world_vegetable_map_2018.html (accessed on 11 March 2019).
- CBI. Which Trends Offer Opportunities or Pose Threads on the European Fresh Fruit and Vegetables Market? Available online: https://www.cbi.eu/market-information/fresh-fruit-vegetables/trends (accessed on 19 August 2020).
- Brain, D. What Is the Current State of Labor in the Greenhouse Industry? Greenhouse Grower. Available online: https://www.greenhousegrower.com/management/what-is-the-current-state-of-labor-in-the-greenhouse-industry/ (accessed on 15 November 2018).
- Wageningen Centre for Development Innovation and SNV Netherlands Development Organization. Rapid Assessment of the Horticulture Sector. Rapid Assessment of The Horticultural Sector. Introductory Brief. Available online: https://www.wur.nl/upload_mm/0/e/a/9eb7eb86-cbfc-4f4c-bc3d-fdb7303681bc_Rapid%20Assessment%20Horticulture%20Introductory%20Brief.pdf (accessed on 1 July 2020).
- Mortensen, L.M.; Ringsevjen, F. Semi-closed greenhouse photosynthesis measurements—A future standard in intelligent climate control. Eur. J. Hortic. Sci. 2020, 85, 219–225. [Google Scholar] [CrossRef]
- Steppe, K.; Vandegehuchte, M.W.; Tognetti, R.; Mencuccini, M. Sap flow as a key trait in the understanding of plant hydraulic functioning. Tree Physiol. 2015, 35, 341–345. [Google Scholar] [CrossRef]
- Yu, L.; Wang, W.; Zhang, X.; Zheng, W. A Review on Leaf Temperature Sensor: Measurement Methods and Application. In Computer and Computing Technologies in Agriculture IX. CCTA 2015. IFIP Advances in Information and Communication Technology; Li, D., Li, Z., Eds.; Springer: Cham, Switzerland, 2016. [Google Scholar]
- Bot, G.P.A. Greenhouse Climate: From Physical Processes to a Dynamic Model. Ph.D. Thesis, Wageningen Agricultural University, Wageningen, The Netherlands, 1983. [Google Scholar]
- Challa, H.; Bot, G.P.A.; Nederhof, E.M.; van de Braak, N.J. Greenhouse climate control in the nineties. Acta Hortic. 1988, 230, 459–470. [Google Scholar] [CrossRef]
- Udink ten Cate, A.J. Modelling and (Adaptive) Control of Greenhouse Climates. Ph.D. Thesis, Wageningen Agricultural University, Wageningen, The Netherlands, 1983. [Google Scholar]
- Tantau, H.J. Climate control algorithms. Acta Hortic. 1980, 106, 49–54. [Google Scholar] [CrossRef]
- Van Straten, G.; van Willgenburg, G.; van Henten, E.; van Ooteghem, R. Optimal Control of Greenhouse Cultivation; CRC Press: Boca Raton, FL, USA, 2010; ISBN 9781420059618. [Google Scholar]
- Seginer, I. Optimizing greenhouse operation for best aerial environment. Acta Hortic. 1980, 106, 169–174. [Google Scholar] [CrossRef]
- Hashimoto, Y. Computer control of short term plant growth by monitoring leaf temperature. Acta Hortic. 1980, 106, 139–146. [Google Scholar] [CrossRef]
- Van Henten, E.J. Greenhouse Climate Management: An Optimal Control Approach. Ph.D. Thesis, Wageningen University, Wageningen, The Netherlands, 1994. [Google Scholar]
- Tap, F. Economics-based Optimal Control of Greenhouse Tomato Crop Production. Ph.D. Thesis, Wageningen University, Wageningen, The Netherlands, 2000. [Google Scholar]
- Van Beveren, P.J.M.; Bontsema, J.; van Straten, G.; van Henten, E.J. Optimal control of greenhouse climate using minimal energy and grower defined bounds. Appl. Energy 2015, 159, 509–519. [Google Scholar] [CrossRef]
- Van Ooteghem, R.J.C. Optimal Control Design for a Solar Greenhouse. Ph.D. Thesis, Wageningen University, Wageningen, The Netherlands, 2007. [Google Scholar]
- Speetjens, S.L. Towards Model Based Adaptive Control for the Watergy Greenhouse. Design and Implementation. Ph.D. Thesis, Wageningen University, Wageningen, The Netherlands, 2008. [Google Scholar]
- Trigui, M.; Barrington, S.; Gauthier, L. A strategy for greenhouse climate control, Part I: Model development. J. Agric. Eng. Res. 2001, 78, 407–413. [Google Scholar] [CrossRef]
- Takakura, T.; Jordan, K.A.; Boyd, L.L. Dynamic simulation of plant growth and environment in the greenhouse. Trans. ASABE 1971, 14, 964–971. [Google Scholar] [CrossRef]
- de Zwart, H.F. Analyzing Energy-Saving Potentials in Greenhouse Cultivation Using a simulation Model. Ph.D. Thesis, Wageningen University, Wageningen, The Netherlands, 1996. [Google Scholar]
- Vanthoor, B.H.E. A Model-Based Greenhouse Design Method. Ph.D. Thesis, Wageningen University, Wageningen, The Netherlands, 2011. [Google Scholar]
- Takakura, T. Climate under Cover. Digital Dynamic Simulation in Plan Bio-Engineering; Kluwer Academic Publishers: Dordrecht, The Netherlands, 1993. [Google Scholar]
- López-Cruz, I.L.; Fitz-Rodríguez, E.; Torres-Monsivais, J.C.; Trejo- Zúñiga, E.C.; Ruíz-García, A.; Ramírez-Arias, A. Control strategies of greenhouse climate for vegetables production. In Biosystems Engineering: Biofactories and Food Production in the Century XXI; Guevara-González, R., Torres-Pacheco, I., Eds.; Springer International Publishing: Cham, Switzerland, 2014; pp. 401–421. [Google Scholar]
- Baptista, F.J.; Litago, J.; Navas, L.M.; Meneses, J.F. Validation and comparison of a physical and statistical dynamic climatic model for a Mediterranean greenhouse in Portugal. Acta Hortic. 2001, 559, 479–486. [Google Scholar] [CrossRef]
- López-Cruz, I.L.; Fitz-Rodríguez, E.; Salazar-Moreno, R.; Rojano-Aguilar, A.; Kacira, M. Development and analysis of dynamical mathematical models of greenhouse climate: A review. Eur. J. Hortic. Sci. 2018, 83, 269–280. [Google Scholar] [CrossRef]
- Ramírez-Arias, A.; Rodríguez, F.; Guzmán, J.L.; Berengue, M. Multiobjective hierarchical control architecture for greenhouse crop growth. Automatica 2012, 48, 490–498. [Google Scholar] [CrossRef]
- Elings, A.; Heinen, M.; Werner, B.E.; de Visser, P.; van den Boogaard, H.A.G.M.; Gieling, T.H.; Marcelis, L.F.M. Feed-forward control of water and nutrient supply in greenhouse horticulture: Development of a system. Acta Hortic. 2004, 654, 195–202. [Google Scholar] [CrossRef] [Green Version]
- Buwalda, F.; van Henten, E.J.; de Gelder, A.; Bontsema, J.; Hemming, J. Toward an optimal control strategy for sweet pepper cultivation—1. A dynamic crop model. Acta Hortic. 2006, 718, 367–374. [Google Scholar] [CrossRef]
- van Henten, E.J.; Buwalda, F.; de Zwart, H.F.; de Gelder, A.; Hemming, J.; Bontsema, J. Toward an optimal control strategy for sweet pepper cultivation—2. Optimization of the yield pattern and energy efficiency. Acta Hortic. 2006, 718, 391–398. [Google Scholar] [CrossRef]
- Sørensen, J.C.; Kjaer, K.H.; Ottosen, C.O.; Jørgensen, B.N. DynaGrow: Next Generation Software for Multi-Objective and Energy Cost-Efficient Control of Supplemental Light in Greenhouses. In Computational Intelligence. Studies in Computational Intelligence; Merelo, J., Melicio, F., Cadenas, J.M., Dourado, A., Madani, K., Ruano, A., Filipe, J., Eds.; Springer: Cham, Switzerland, 2019; p. 792. [Google Scholar]
- Gary, C.; Jones, J.W.; Tchamitchian, M. Crop modelling in horticulture: State of the art. Sci. Hortic. 1998, 74, 3–20. [Google Scholar] [CrossRef]
- Heuvelink, E. Tomato Growth and Yield: Quantitative Analysis and Synthesis. Ph.D. Thesis, Wageningen University, Wageningen, The Netherlands, 1996. [Google Scholar]
- Jones, J.W.; Dayan, E.; Allen, L.H.; van Keulen, H.; Challa, H.A. Dynamic tomato growth and yield model (TOMGRO). Trans. ASAE 1991, 34, 0663–0672. [Google Scholar] [CrossRef]
- Bertin, N.; Heuvelink, E. Dry-matter production in a tomato crop: Comparison of two simulation models. J. Hortic. Sci. 1993, 68, 905–1011. [Google Scholar] [CrossRef]
- Kuijpers, W.J.P.; van de Molengraft, M.J.; van Mourik, S.; van ’t Ooster, A.; Hemming, S.; Henten, E.J. Model selection with a common structure: Tomato crop growth models. Biosyst. Eng. 2019, 187, 247–257. [Google Scholar] [CrossRef]
- Sarlikioti, V.; Visser, P.H.B.; de Buck-Sorlin, G.H.; Marcelis, L.F.M. How plant architecture affects light absorption and photosynthesis in tomato: Towards an ideotype for plant architecture using a functional-structural plant model. Ann. Bot. 2011, 108, 1065–1073. [Google Scholar] [CrossRef] [Green Version]
- Visser, P.H.B.; de Buck-Sorlin, G.H.; van der Heijden, G.W.A.M. Optimizing illumination in the greenhouse using a 3D model of tomato and a ray tracer. Front. Plant. Sci. 2014. [Google Scholar] [CrossRef] [Green Version]
- Vanthoor, B.H.E.; de Visser, P.H.B.; Stanghellini, C.; van Henten, E.J. A methodology for model-based greenhouse design: Part 2, description and validation of a tomato yield model. Biosyst. Eng. 2011, 110, 378–395. [Google Scholar] [CrossRef]
- Marcelis, L.F.M.; Elings, A.; de Visser, P.H.B.; Heuvelink, E. Simulating growth and development of tomato crop. Acta Hortic. 2009, 821, 101–110. [Google Scholar] [CrossRef] [Green Version]
- Marshall-Colon, A.; Long, S.P.; Allen, D.K.; Allen, G.; Beard, D.A.; Benes, B.; von Caemmerer, S.; Christensen, A.J.; Cox, D.J.; Hart, J.C.; et al. Crops in silico: Generating virtual crops using an integrative and multi-scale modeling platform. Front. Plant. Sci. 2017, 8, 786. [Google Scholar] [CrossRef]
- Nishina, H. Development of speaking plant approach technique for intelligent greenhouse. Agric. Agric. Sci. Proc. 2015, 3, 9–13. [Google Scholar] [CrossRef] [Green Version]
- Rahnemoonfar, M.; Sheppard, C. Deep count: Fruit counting based on deep simulated learning. Sensors 2017, 17, 905. [Google Scholar] [CrossRef] [Green Version]
- Mishra, P.; Polder, G.; Vilfan, N. Close range spectral imaging for disease detection in plants using autonomous platforms: A Review on recent studies. Curr. Rob. Rep. 2020, 1, 43–48. [Google Scholar] [CrossRef] [Green Version]
- Nieuwenhuizen, A.T.; Kool, J.; Suh, H.K.; Hemming, J. Automated spider mite damage detection on tomato leaves in greenhouses. Acta Hortic. 2020, 1268, 165–172. [Google Scholar] [CrossRef]
- Suh, H.K.; IJsselmuiden, J.; Hofstee, J.W.; van Henten, E.J. Transfer learning for the classification of sugar beet and volunteer potato under field conditions. Biosyst. Eng. 2018, 174, 50–65. [Google Scholar] [CrossRef]
- Bac, W. Improving Obstacle Awareness for Robotic Harvesting of Sweet-Pepper. Ph.D. Thesis, Wageningen University, Wageningen, The Netherlands, 2015. [Google Scholar]
- Barth, R. Vision Principles for Harvest Robotics. Sowing Artificial Intelligence in Agriculture. Ph.D. Thesis, Wageningen University, Wageningen, The Netherlands, 2018. [Google Scholar]
- Martin-Clouaire, R.; Boulard, T.; Cros, M.J.; Jeannequin, B. Using empirical knowledge for the determination of climatic setpoints: An artificial intelligence approach. In The Computerized Greenhouse: Automated Control Application in Plant Production; Hashimoto, Y., Bot, G.P.A., Day, W., Tantau, H.J., Nonami, H., Eds.; Academic Press: Cambridge, MA, USA, 1993; pp. 197–224. [Google Scholar]
- Kurata, K. Greenhouse control by machine learning. Acta Hortic. 1988, 230, 195–200. [Google Scholar] [CrossRef]
- Seginer, I. Some artificial neural network applications to greenhouse environmental control. Comput. Electron. Agric. 1997, 18, 167–186. [Google Scholar] [CrossRef]
- Blasco, X.; Martínez, M.; Herrero, J.M.; Ramos, C.; Sanchis, J. Model-based predictive control of greenhouse climate for reducing energy and water consumption. Comput. Electron. Agric. 2007, 5, 49–70. [Google Scholar] [CrossRef]
- Morimoto, T.; Hashimoto, Y. AI approaches to identification and control of total plant production systems. Control Eng. Pract. 2000, 8, 555–567. [Google Scholar] [CrossRef]
- Caponetto, R.; Fortuna, L.; Nunnari, G.; Occhipinti, L.; Xibilia, M.G. Soft computing for greenhouse climate control. IEEE Trans. Fuzzy Syst. 2000, 8, 753–760. [Google Scholar]
- Hemming, S.; de Zwart, H.F.; Elings, A.; Righini, I.; Petropoulou, A. Remote control of greenhouse vegetable production with artificial intelligence—Greenhouse climate, irrigation, and crop production. Sensors 2019, 19, 1807. [Google Scholar] [CrossRef] [Green Version]
- Verkerke, W.; Janse, J.; Kersten, M. Practical Application of a model for tomato fruit taste. Acta Hort. 1998, 456, 199–205. [Google Scholar] [CrossRef]
- Elings, A.; Broekhuijsen, A.G.M.; Harkema, H.; Dieleman, J.A. The relation between physiological maturity and colour of tomato fruits. Acta Hort. 2004, 654, 37–43. [Google Scholar] [CrossRef]
- Li, Y.L.; Stanghellini, C.; Challa, H. Effect of electrical conductivity and transpiration on production of greenhouse tomato (Lycopersicon esculentum L.). Scientia Hort. 2001, 88, 11–29. [Google Scholar] [CrossRef]
- Qian, T.; Elings, A.; Dieleman, J.A.; Gort, G.; Marcelis, L.F.M. Estimation of photosynthesis parameters for a modified Farquhar-von Caemmerer-Berry model using the simultaneous estimation method and the nonlinear mixed effects model. Environ. Exp. Bot. 2012, 82, 66–73. [Google Scholar] [CrossRef]
- Penning de Vries, F.W.T. The cost of maintenance processes in plant cells. Ann. Bot. 2015, 39, 77–92. [Google Scholar] [CrossRef]
- Iddio, E.; Wang, L.; Thomas, Y.; McMorrow, G.; Denzer, A. Energy efficient operation and modelling for greenhouses: A literature review. Renew. Sust. Energ. Rev. 2020, 117, 109480. [Google Scholar] [CrossRef]
- Hyontai, S.U.G. Performance of machine learning algorithms and diversity in data. In MATEC Web of Conferences, Proceedings of the 22nd International Conference on Circuits, Systems, Communications and Computers (CSCC 2018), Majorca, Spain, 14–17 July 2018; EDP Sciences: Les Ulis, France, 2018. [Google Scholar]
- Olatunji, J.R.; Redding, G.P.; Rowe, C.L.; East, A.R. Reconstruction of kiwifruit fruit geometry using a CGAN trained on a synthetic dataset. Comput. Electron. Agric. 2020, 177, 105699. [Google Scholar] [CrossRef]
- Sang-Yeon, L.; In-bok, L.; Uk-hyeon, Y.; Rack-woo, K.; Jun-gyu, K. Optimal sensor placement for monitoring and controlling greenhouse internal environments. Biosyst. Eng. 2019, 188, 190–206. [Google Scholar]
- Liu, X.; Zhao, D.; Jia, W.; Ji, W.; Ruan, C.; Sun, Y. Cucumber fruits detection in greenhouses based on instance segmentation. IEEE Access 2019, 7, 139635–139642. [Google Scholar] [CrossRef]
- Huang, Y.H.; Te Lin, T. High-throughput image analysis framework for fruit detection, localization and measurement from video streams. In Proceedings of the ASABE Annual International Meeting, American Society of Agricultural and Biological Engineers, Boston, MA, USA, 7 July 2019. [Google Scholar]
- Li, H.; Zhang, M.; Gao, Y.; Li, M.; Ji, Y. Green ripe tomato detection method based on machine vision in greenhouse. Trans. Chinese Soc. Agric. Eng. 2017, 33, 328–334. [Google Scholar]
- Zhao, Y.; Gong, L.; Zhou, B.; Huang, Y.; Liu, C. Detecting tomatoes in greenhouse scenes by combining AdaBoost classifier and colour analysis. Biosyst. Eng. 2016, 148, 127–137. [Google Scholar] [CrossRef]
- Yuan, T.; Li, W.; Feng, Q.; Zhang, J. Spectral imaging for greenhouse cucumber fruit detection based on binocular stereovision. In Proceedings of the American Society of Agricultural and Biological Engineers, Pittsburgh, PA, USA, 20–23 June 2010. [Google Scholar]
- Vermeulen, K.; Steppe, K.; Linh, N.S.; Lemeur, R.; De Backer, L.; Bleyaert, P.; Berckmans, D. Simultaneous response of stem diameter, sap flow rate and leaf temperature of tomato plants to drought stress. Acta Hort. 2007, 801, 1259–1266. [Google Scholar] [CrossRef]
- Kerkhof, L. Optimal Control of Autonomous Greenhouses: A Data-Driven Approach. Master’s Thesis, University of Techology, Delft, The Netherlands, 12 July 2020. [Google Scholar]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Greenhouse Compartment | Number of Trusses (#/stem) | Average Temperature (°C) | Number of Fruits (#/stem) | Number of Fruits (#/m2) | Topping Dates |
|---|---|---|---|---|---|
| 301 | 23.8 | 21.34 | 332 | 1577 | 30 April 2020 |
| 302 | 22.0 | 22.04 | 292 | 1165 | 16 April 2020 |
| 303 | 23.2 | 22.70 | 302 | 1323 | 17 April 2020 |
| 304 | 21.7 | 21.37 | 325 | 1373 | 23 April 2020 |
| 305 | 22.0 | 21.40 | 351 | 1340 | 24 April 2020 |
| 306 | 22.6 | 23.25 | 315 | 1459 | 21 April 2020 |
| Greenhouse Compartment | Heat (MJ/kg) | Electricity (kWh/kg) | CO2 (kg/kg) | Water (L/kg) | Nutrients (g/kg) |
|---|---|---|---|---|---|
| 306 | 12.9 | 18.7 | 0.63 | 25.0 | 83.0 |
| 302 | 18.5 | 17.6 | 0.74 | 25.2 | 81.0 |
| 301 | 25.3 | 19.9 | 0.87 | 25.9 | 78.0 |
| 304 | 25.9 | 17.7 | 0.56 | 26.9 | 90.0 |
| 305 | 12.8 | 24.0 | 0.72 | 27.9 | 100.0 |
| 303 | 33.0 | 19.0 | 0.60 | 27.4 | 99.0 |
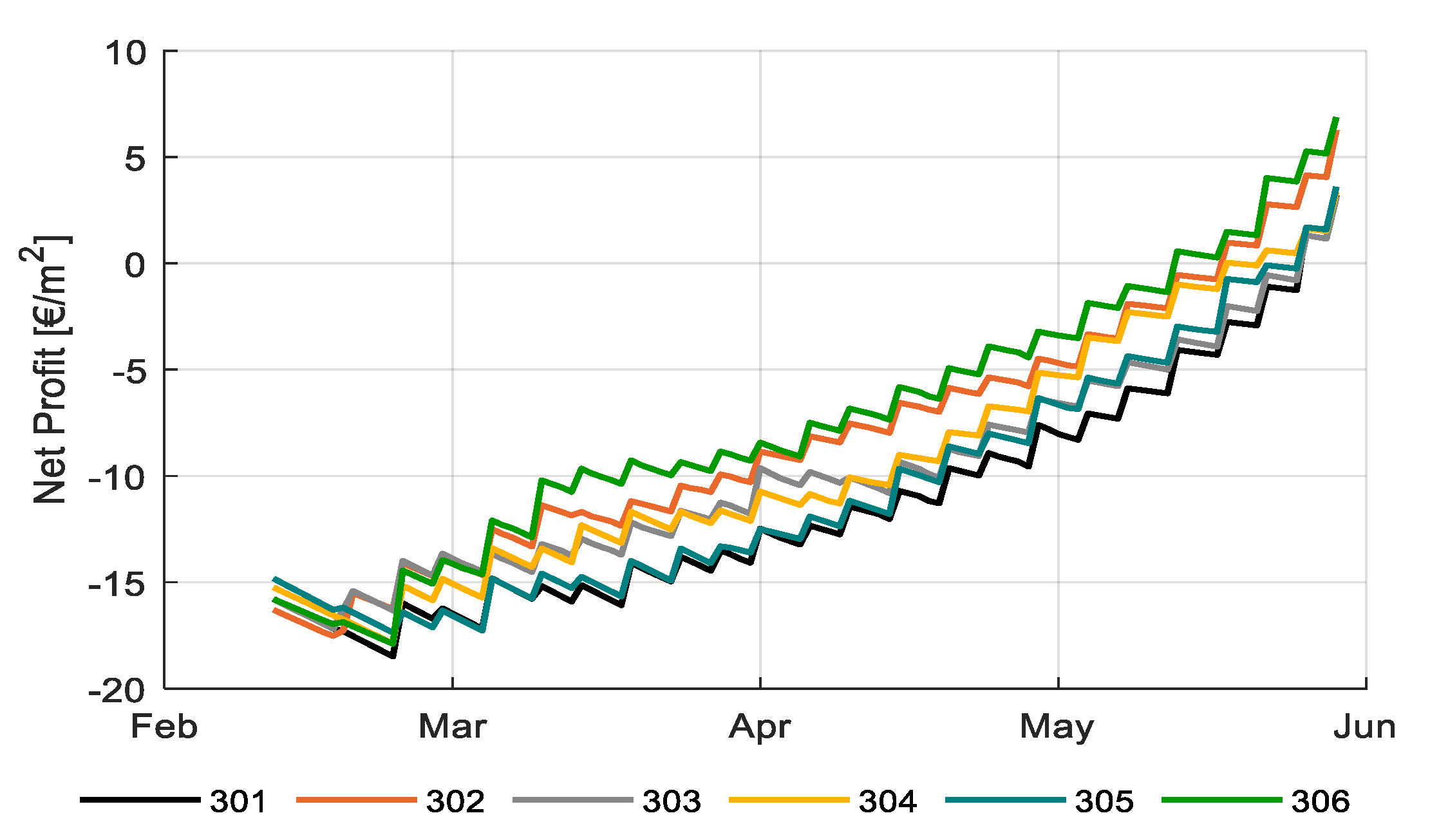
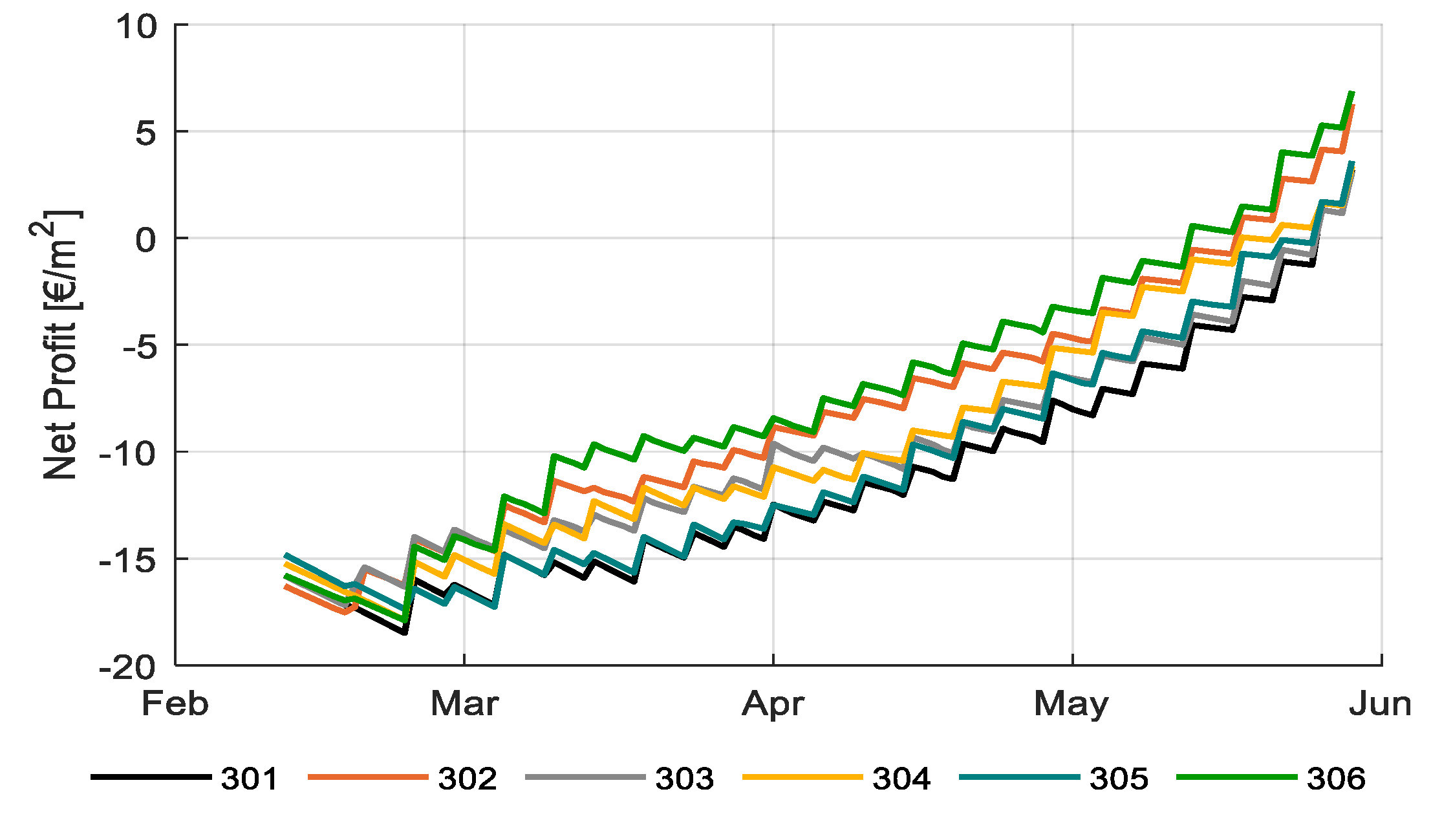
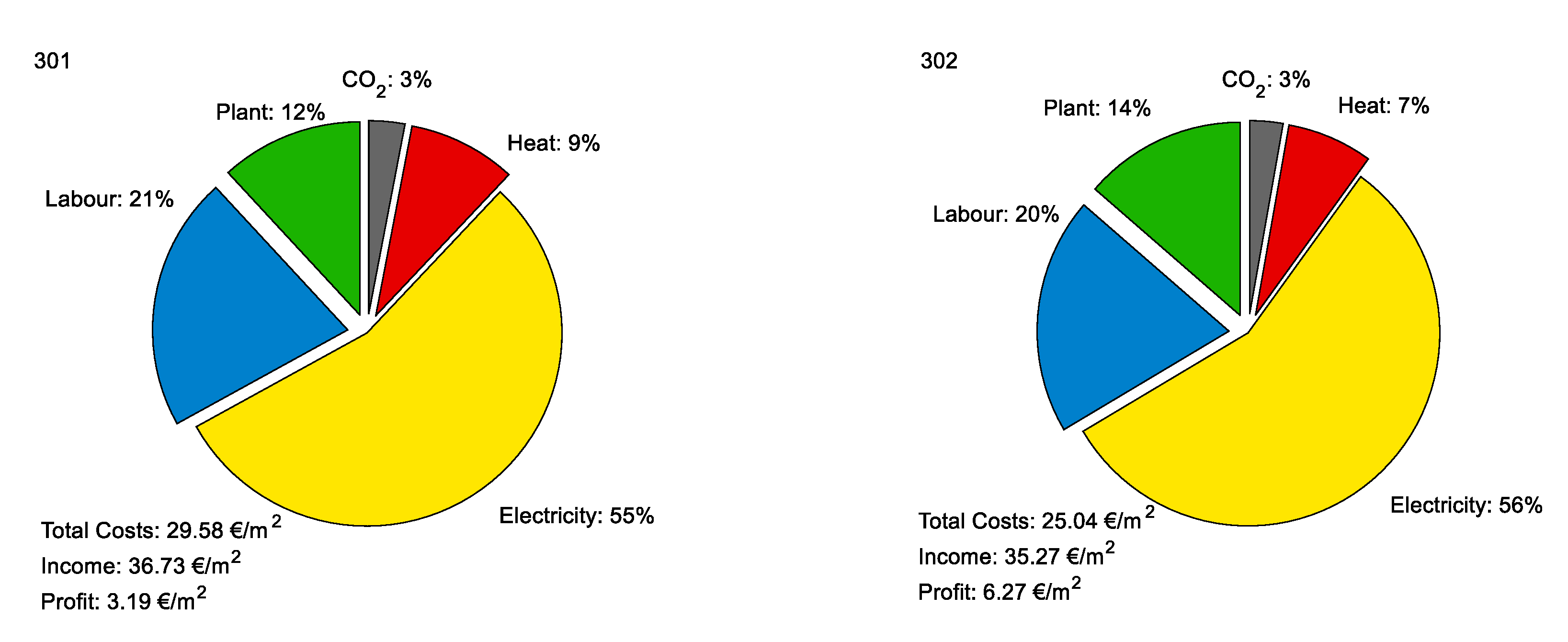
| Greenhouse Compartment | Total Costs (€/m2) | Total Income (€/m2) | Net Profit (€/m2) |
|---|---|---|---|
| 306 | 26.07 | 37.22 | 6.86 |
| 302 | 25.04 | 35.27 | 6.27 |
| 305 | 28.64 | 35.09 | 3.59 |
| 304 | 25.36 | 33.00 | 3.35 |
| 301 | 29.58 | 36.73 | 3.19 |
| 303 | 29.38 | 35.56 | 3.10 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hemming, S.; Zwart, F.d.; Elings, A.; Petropoulou, A.; Righini, I. Cherry Tomato Production in Intelligent Greenhouses—Sensors and AI for Control of Climate, Irrigation, Crop Yield, and Quality. Sensors 2020, 20, 6430. https://doi.org/10.3390/s20226430
Hemming S, Zwart Fd, Elings A, Petropoulou A, Righini I. Cherry Tomato Production in Intelligent Greenhouses—Sensors and AI for Control of Climate, Irrigation, Crop Yield, and Quality. Sensors. 2020; 20(22):6430. https://doi.org/10.3390/s20226430
Chicago/Turabian StyleHemming, Silke, Feije de Zwart, Anne Elings, Anna Petropoulou, and Isabella Righini. 2020. "Cherry Tomato Production in Intelligent Greenhouses—Sensors and AI for Control of Climate, Irrigation, Crop Yield, and Quality" Sensors 20, no. 22: 6430. https://doi.org/10.3390/s20226430