A Review of Low-Cost Particulate Matter Sensors from the Developers’ Perspectives

 ,
,  ,
,  ,
,  , and
, and
Abstract
:1. Introduction
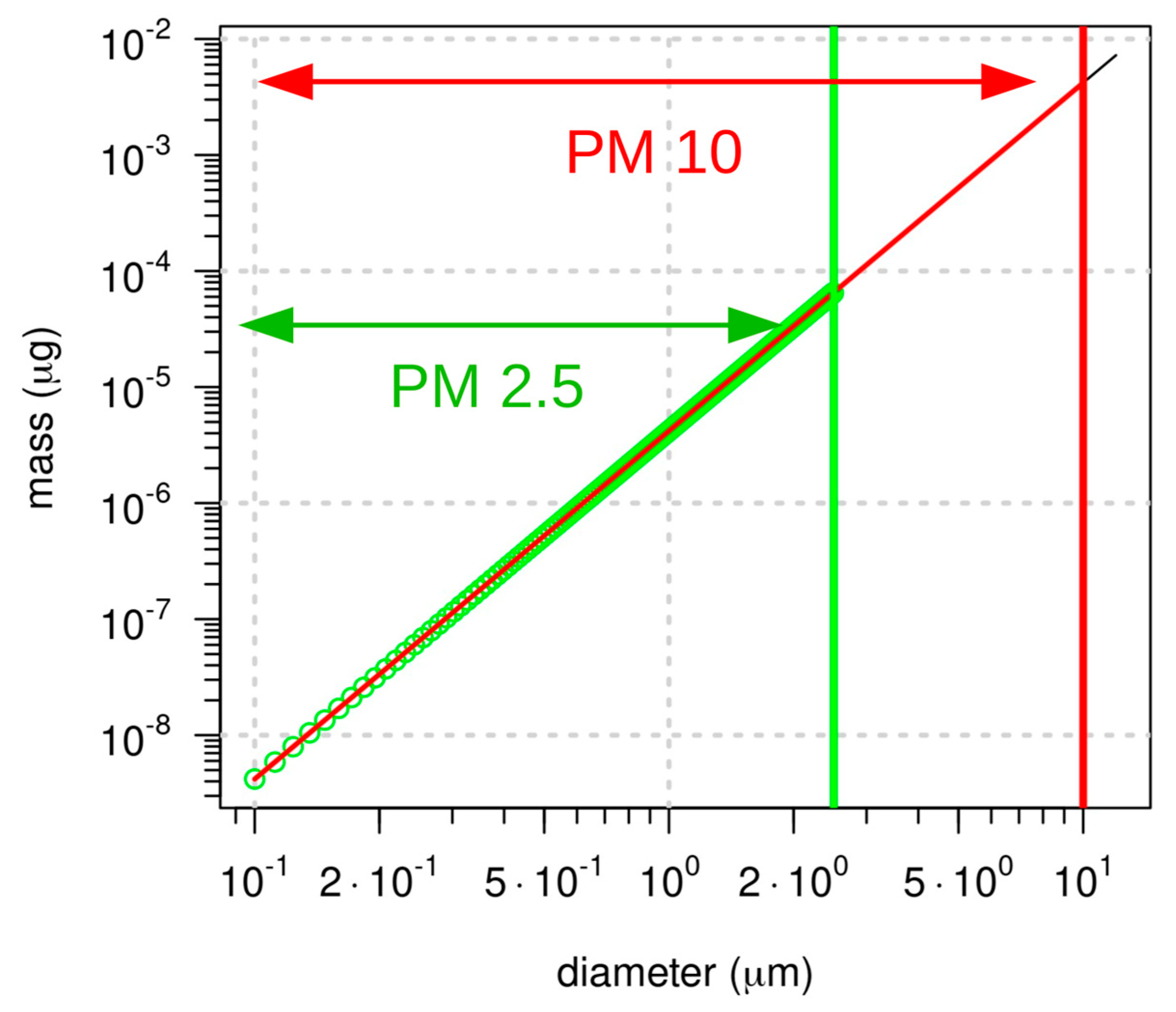
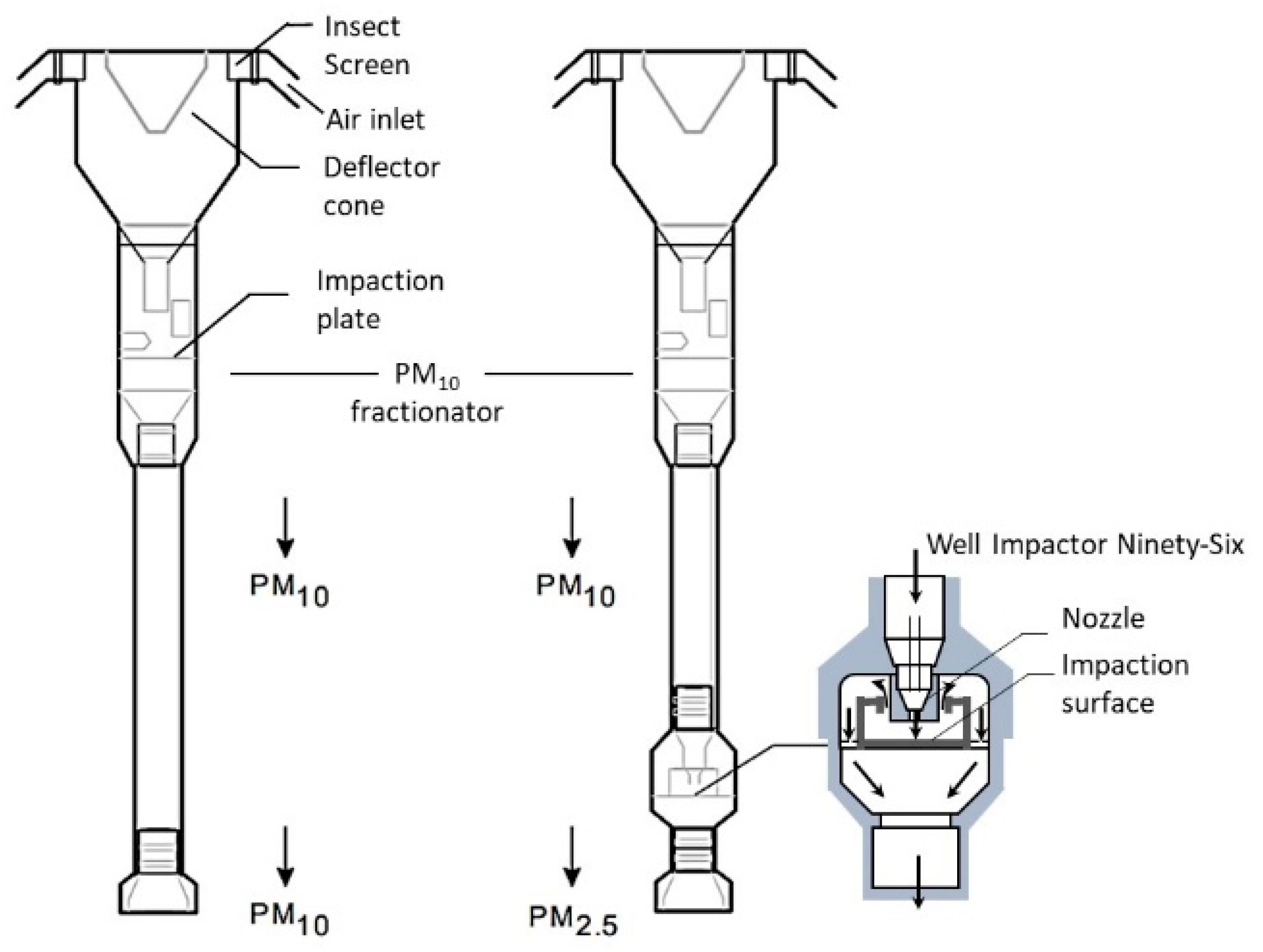
2. Particulate Matter Basics and Measurement Parameters
Measurement Techniques
3. Low Cost PM Sensors (LCPMS)
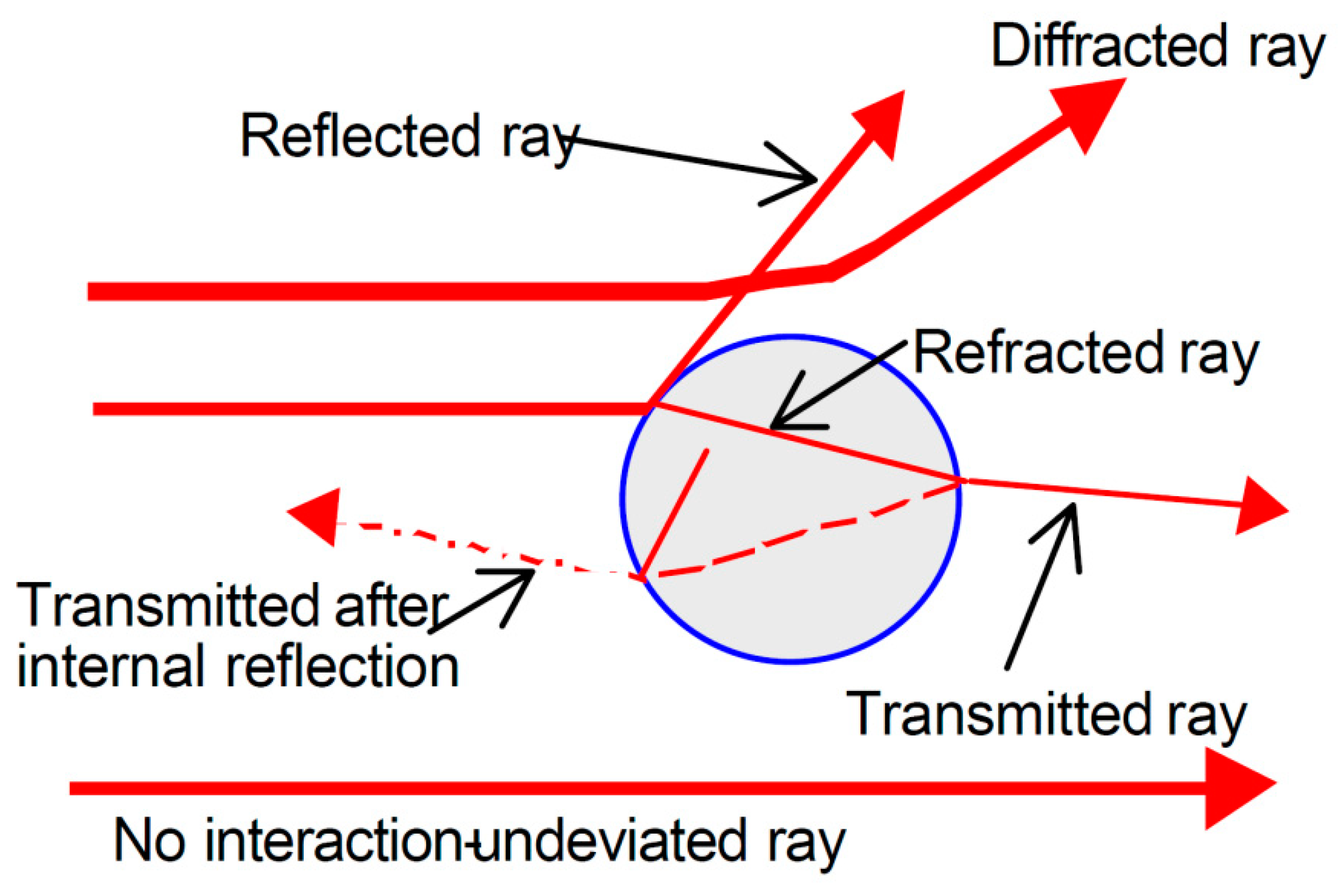
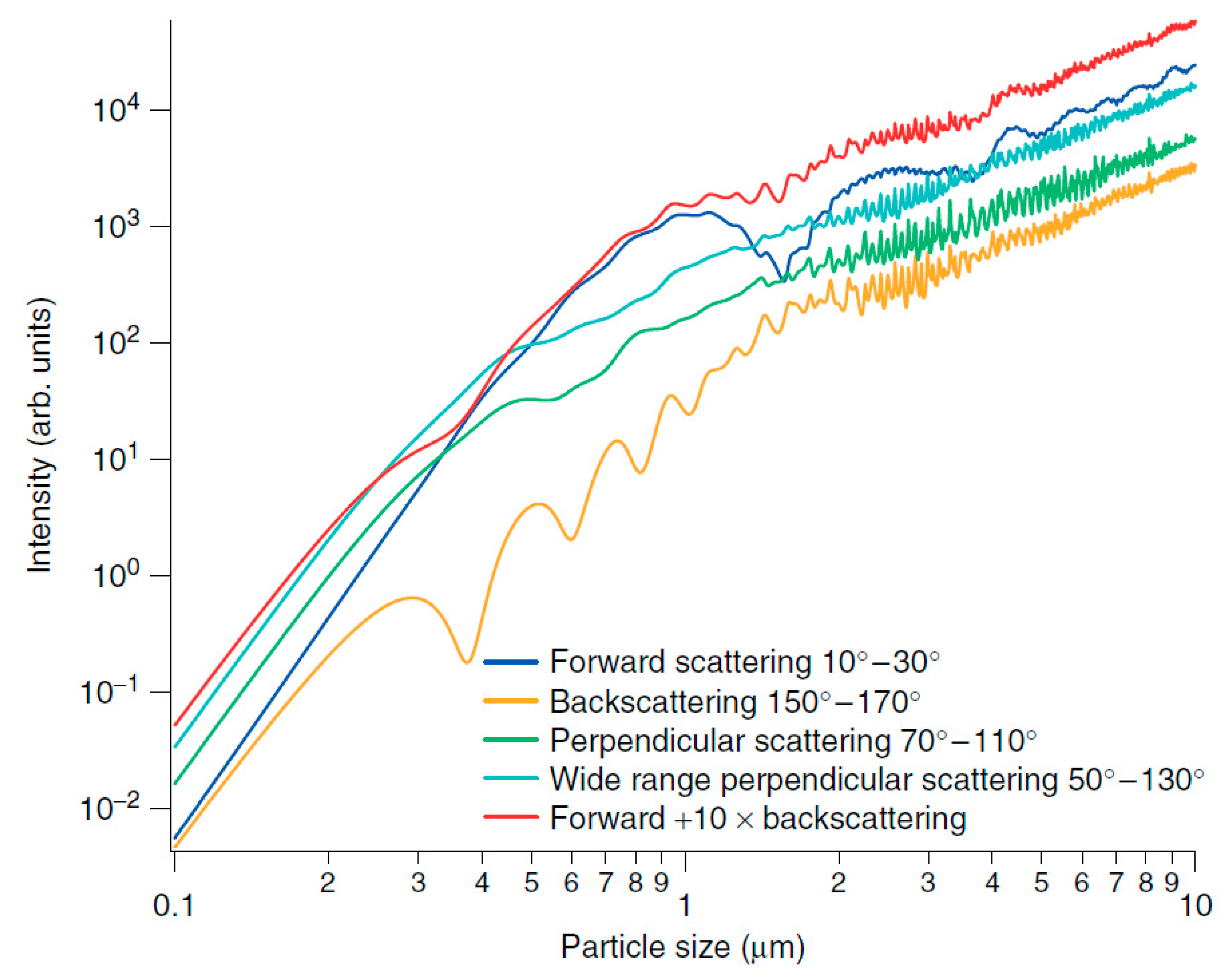
3.1. Light Scattering: Mie Theory
- Light is assumed to be monochromatic and composed of plane waves.
- The particle is spherical and isotropic.
- Both scattering and absorption are considered.
- Light scattered from one particle to another is negligible: this is undoubtedly true if the particle concentration is low.
- The scattering characteristics under consideration are independent of the motion of the particle.
- No quantum effects are considered.
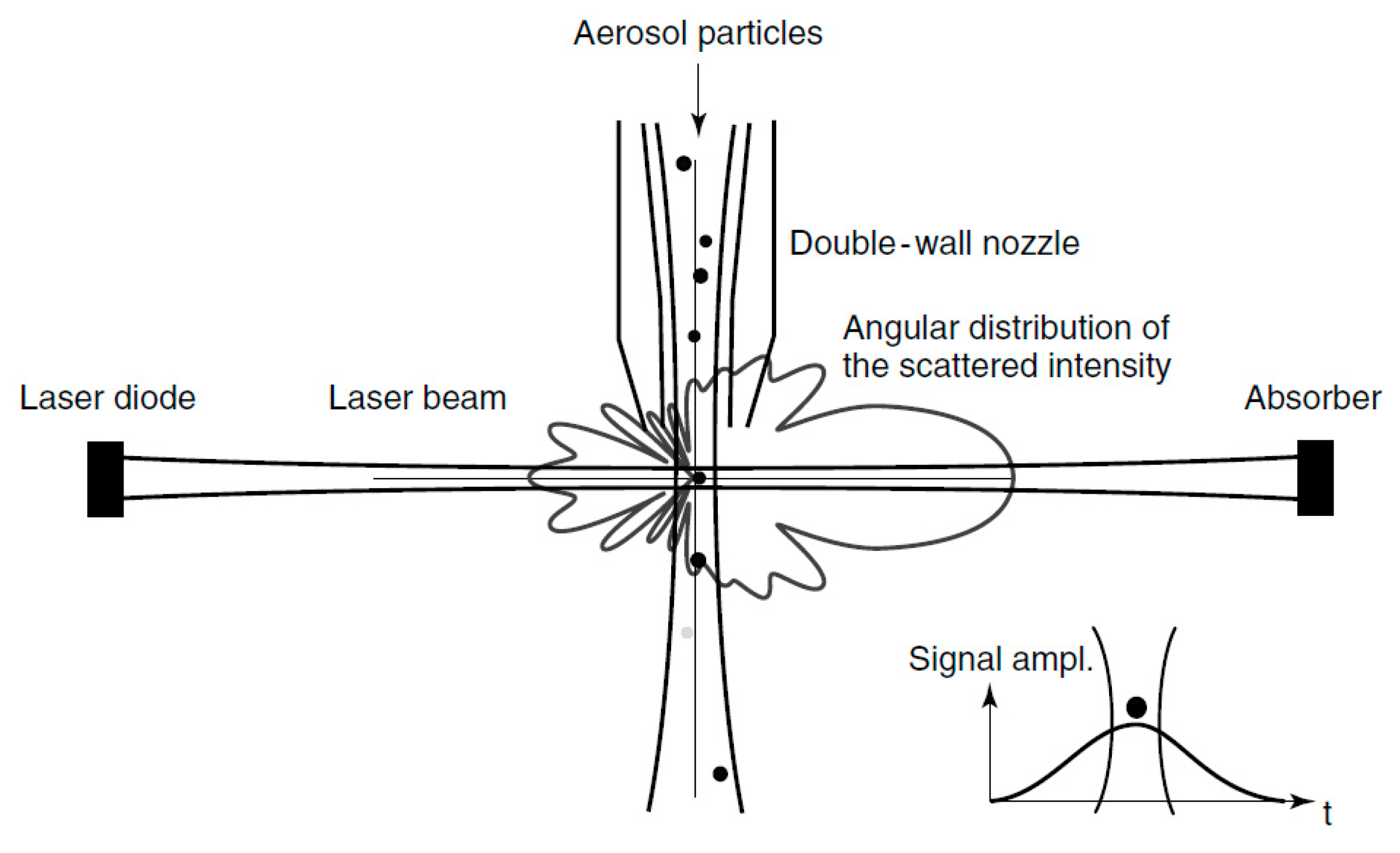
3.2. OPC
4. LCPMS Characterization and Calibration
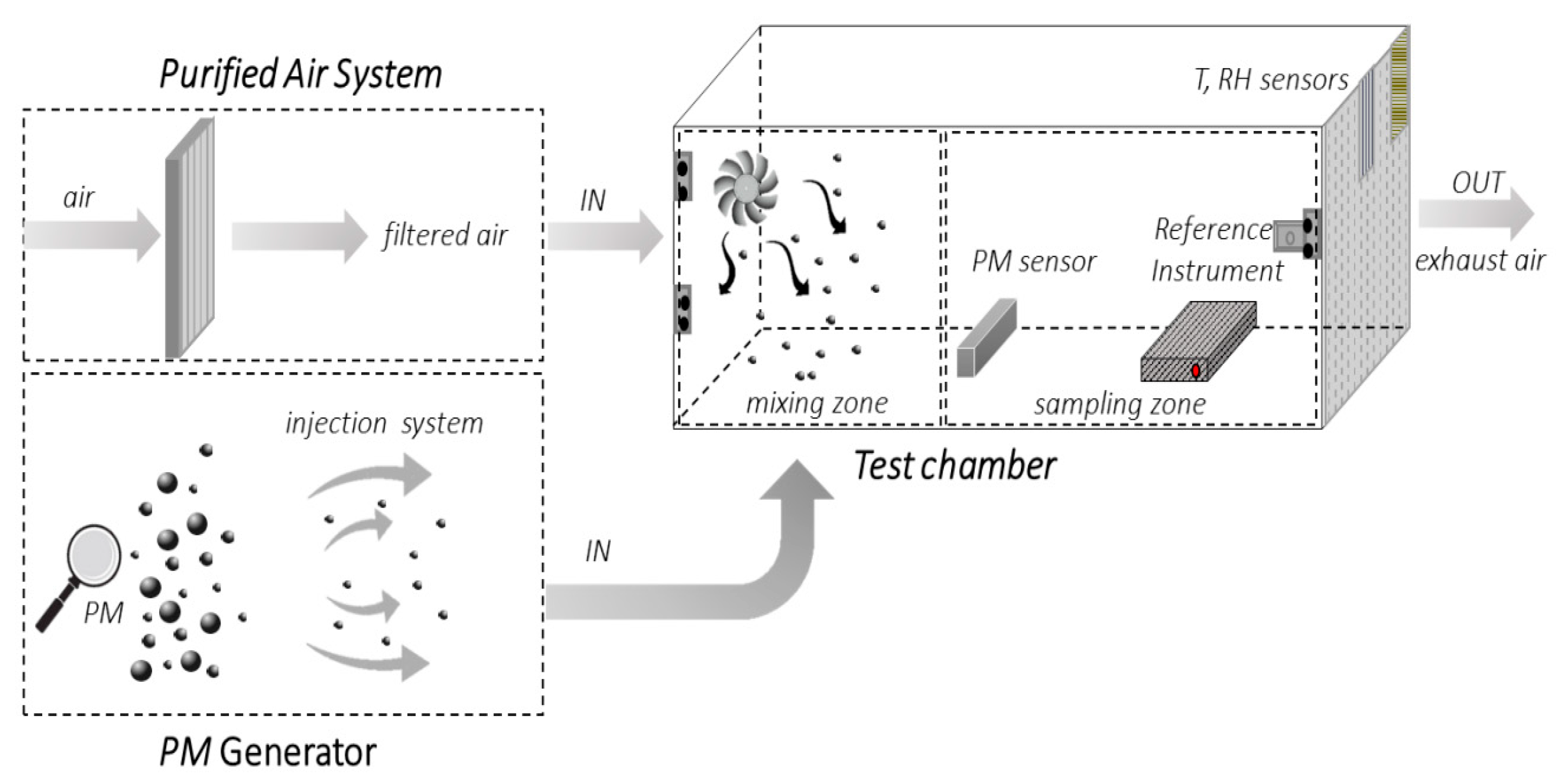
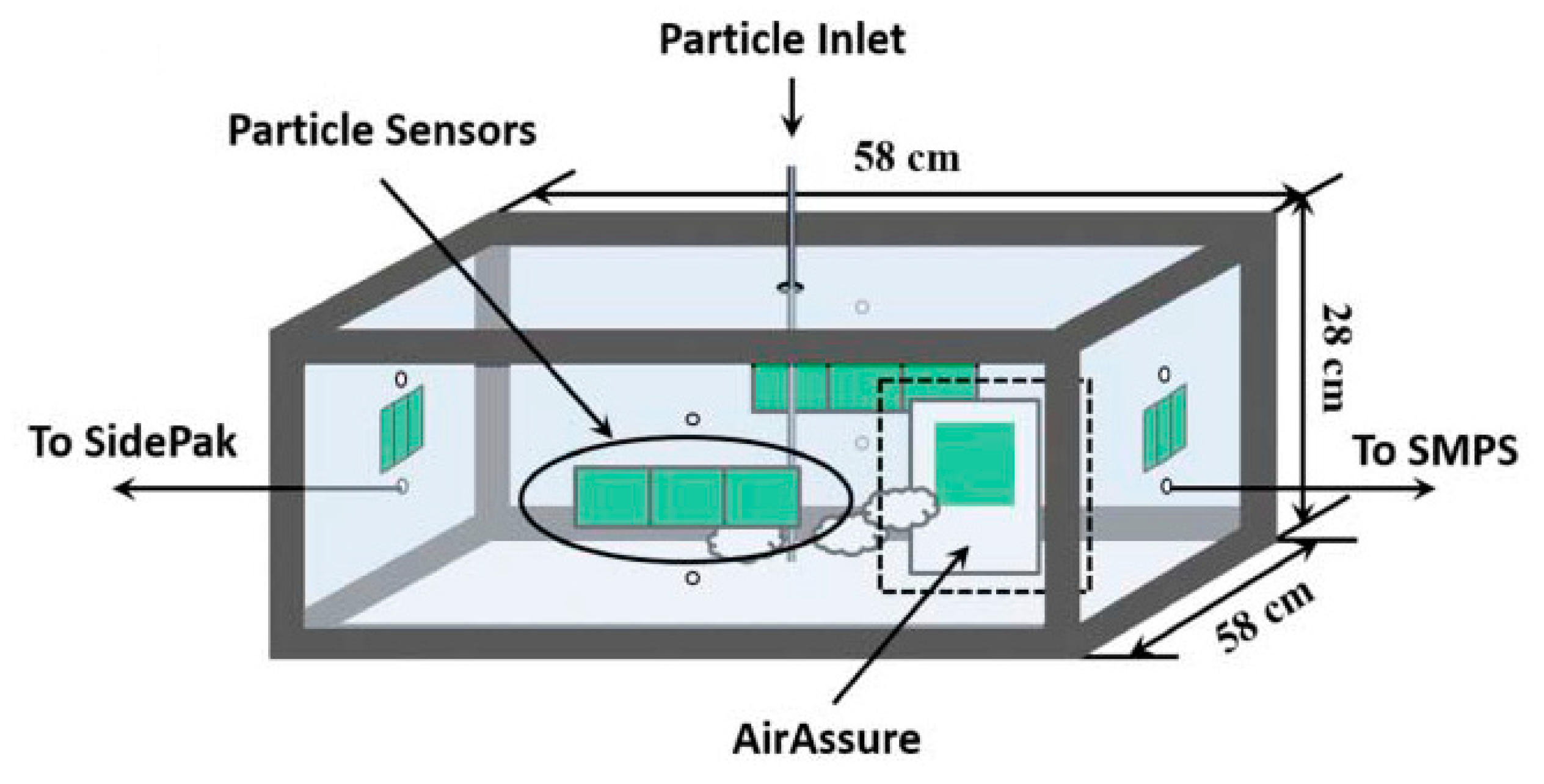
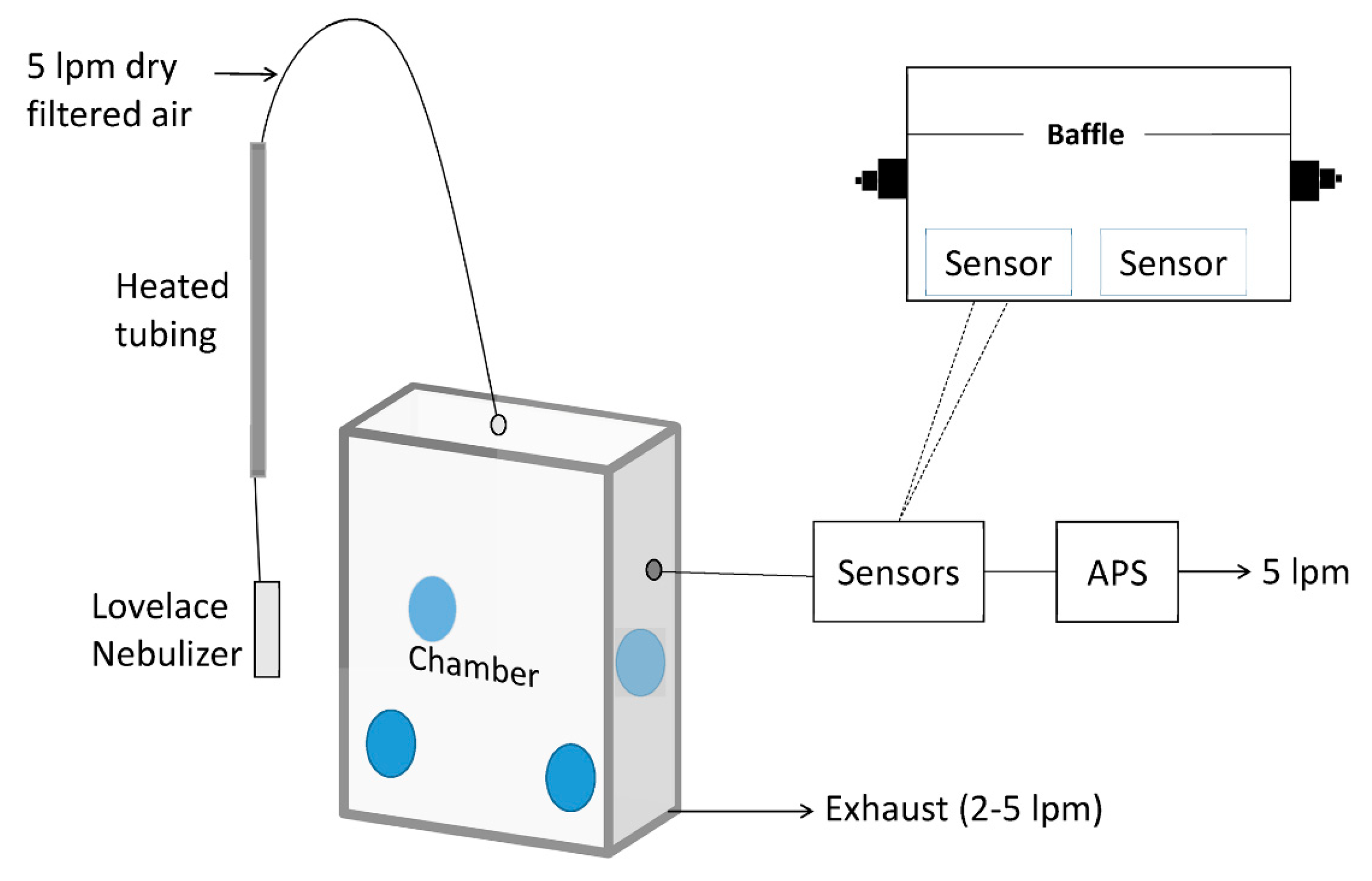
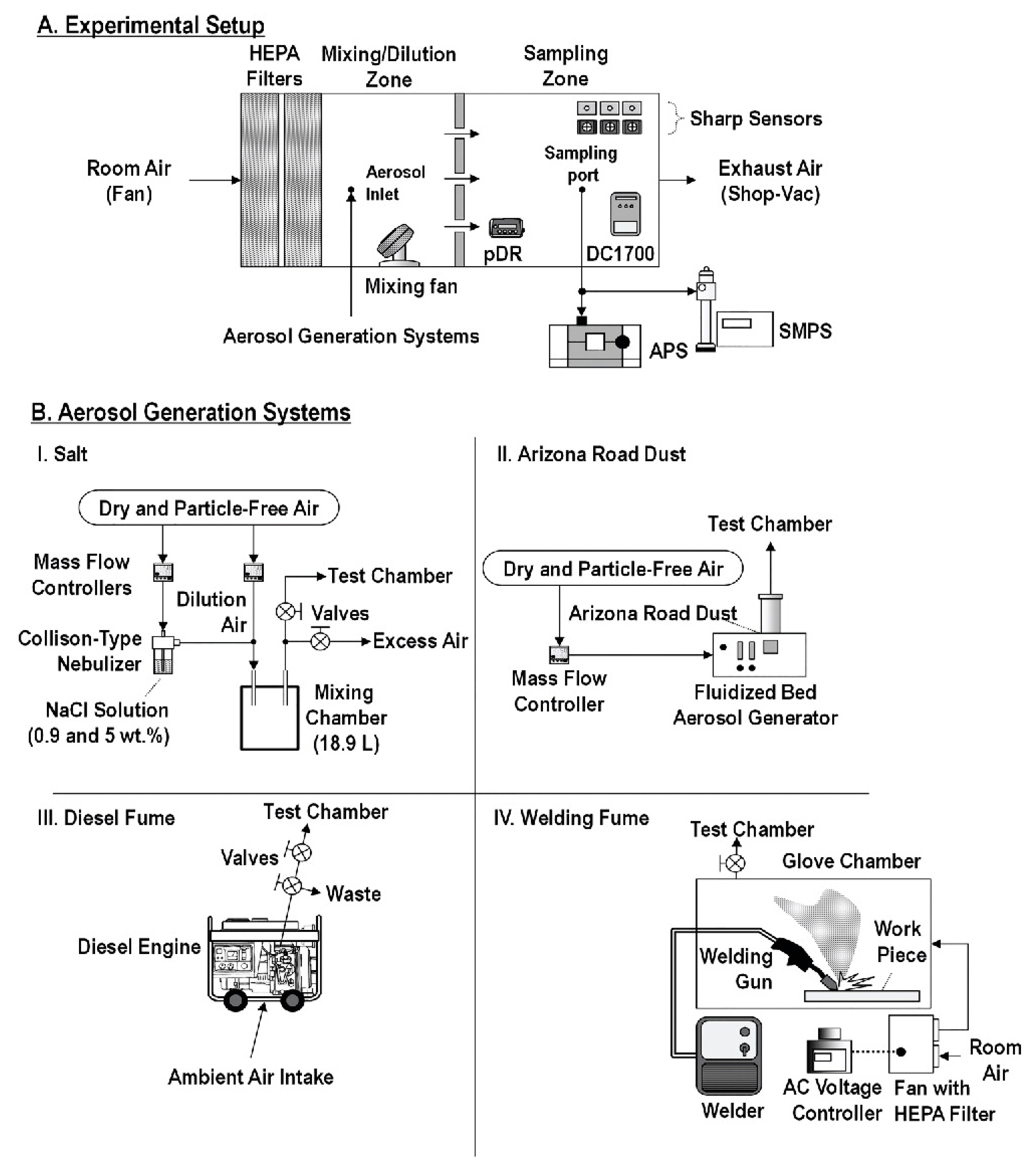
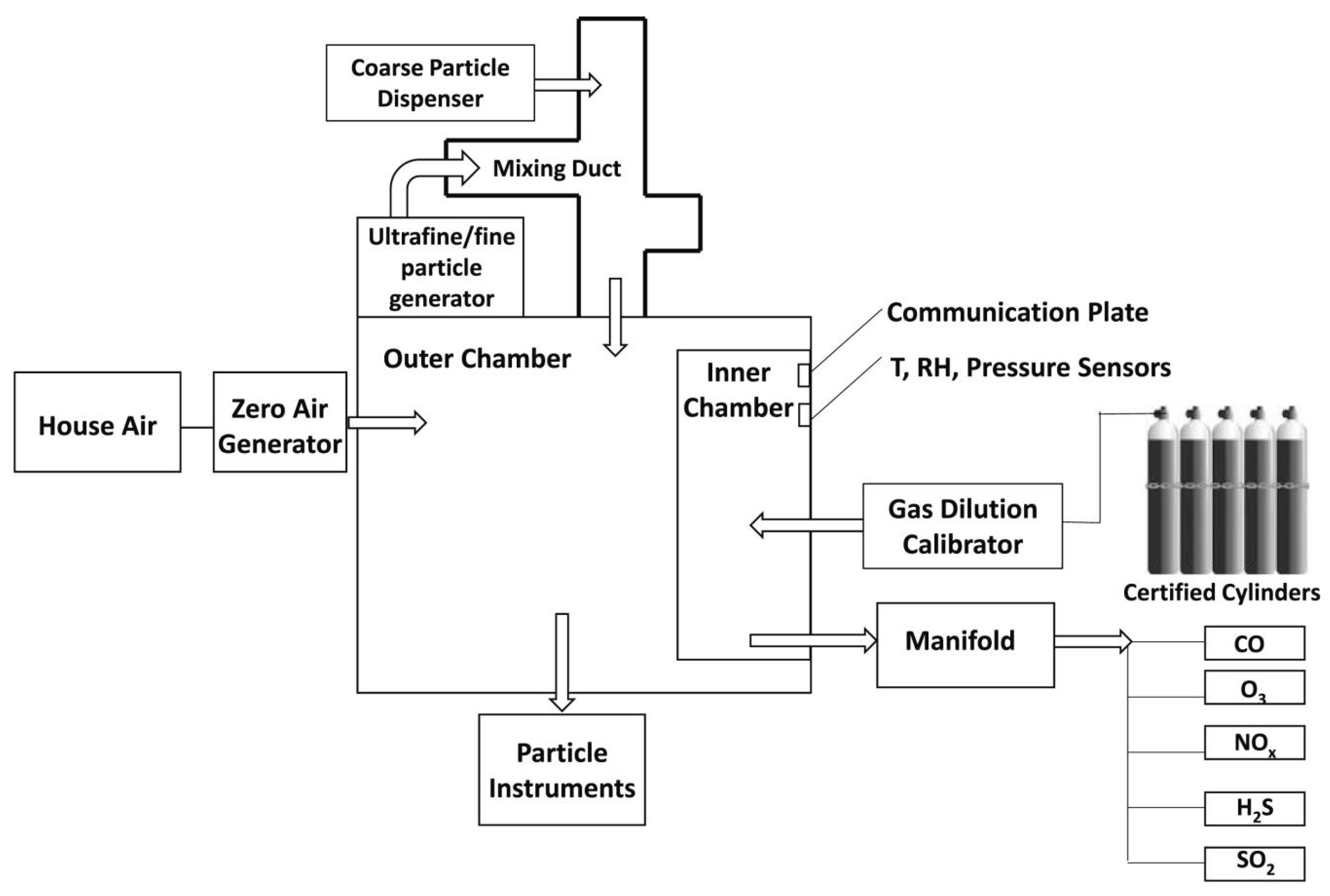
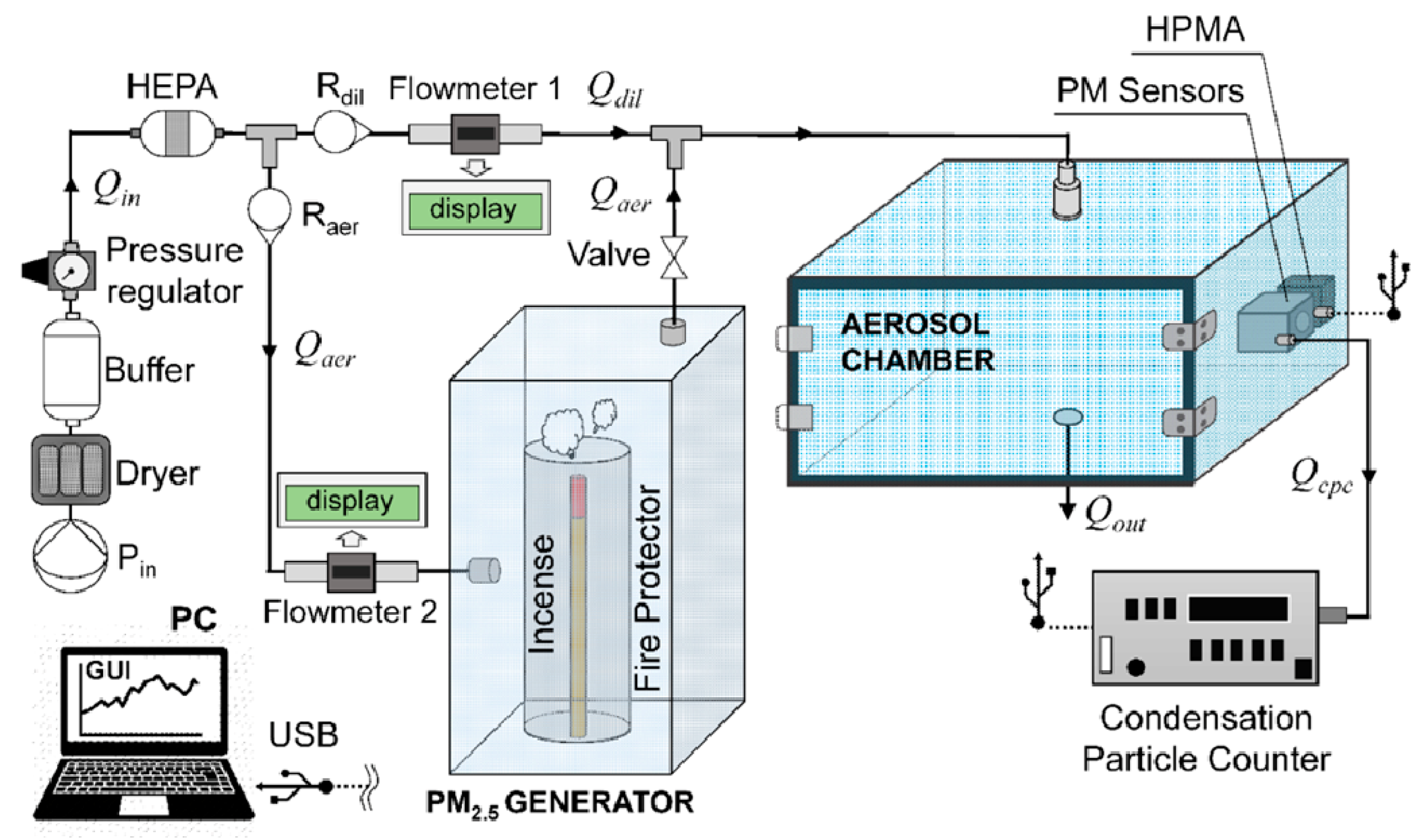
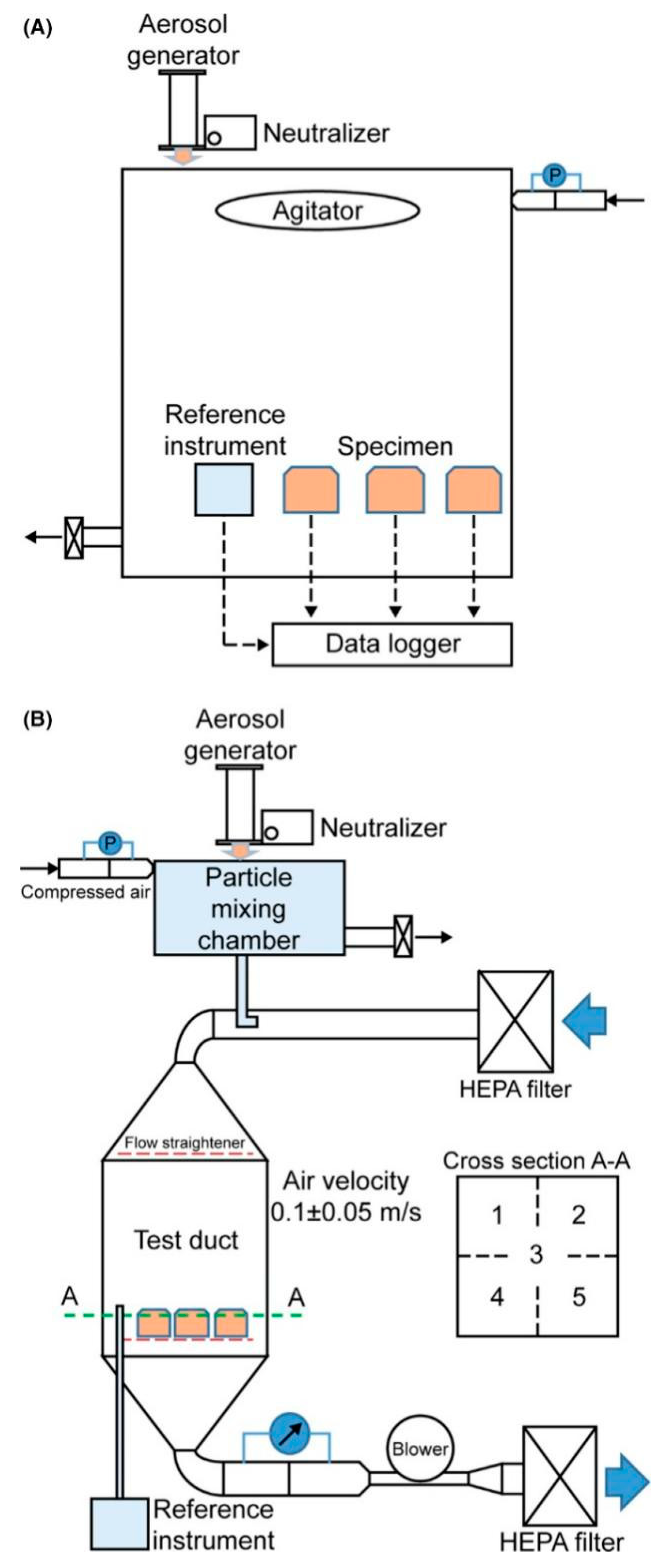
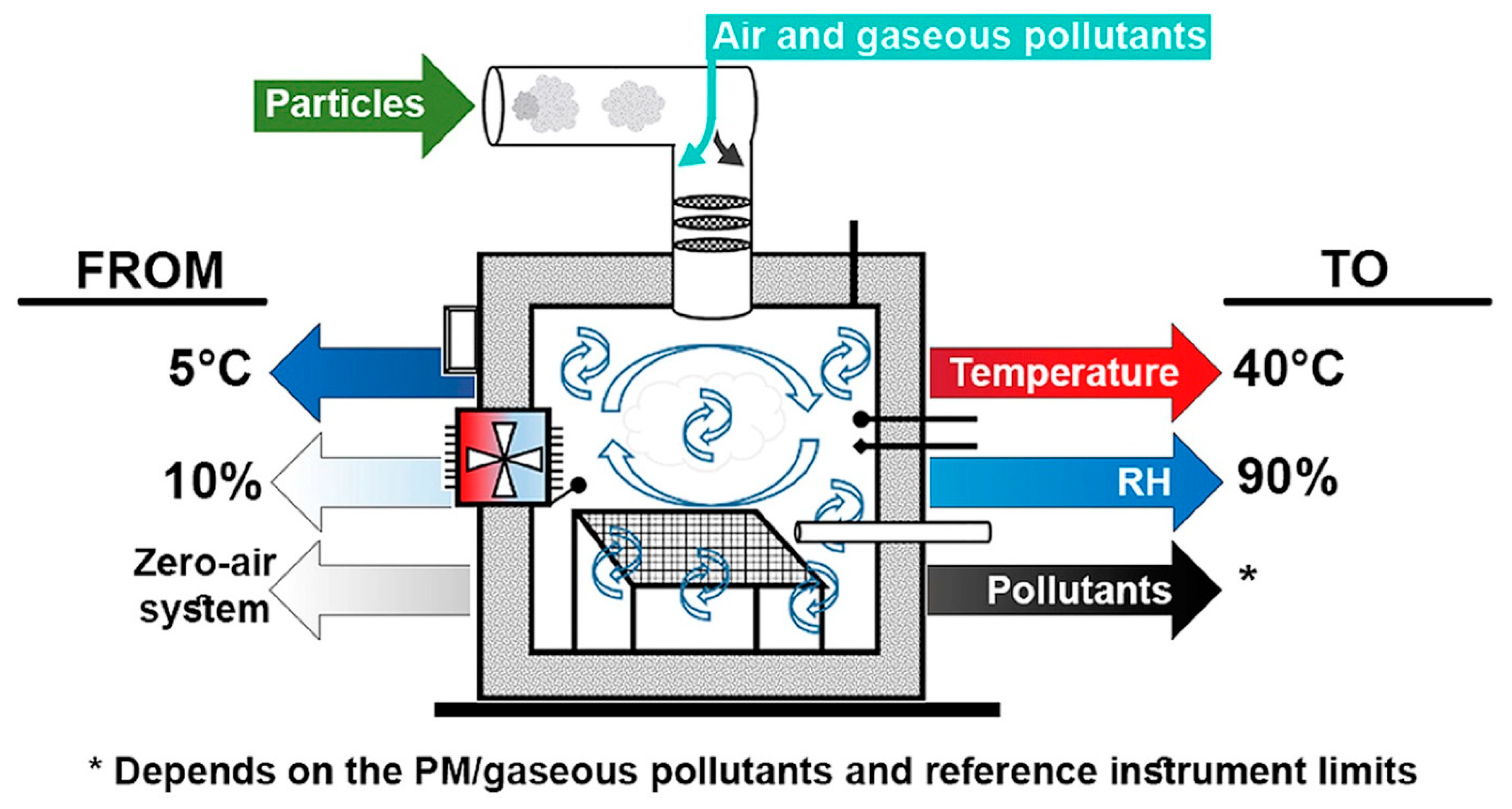
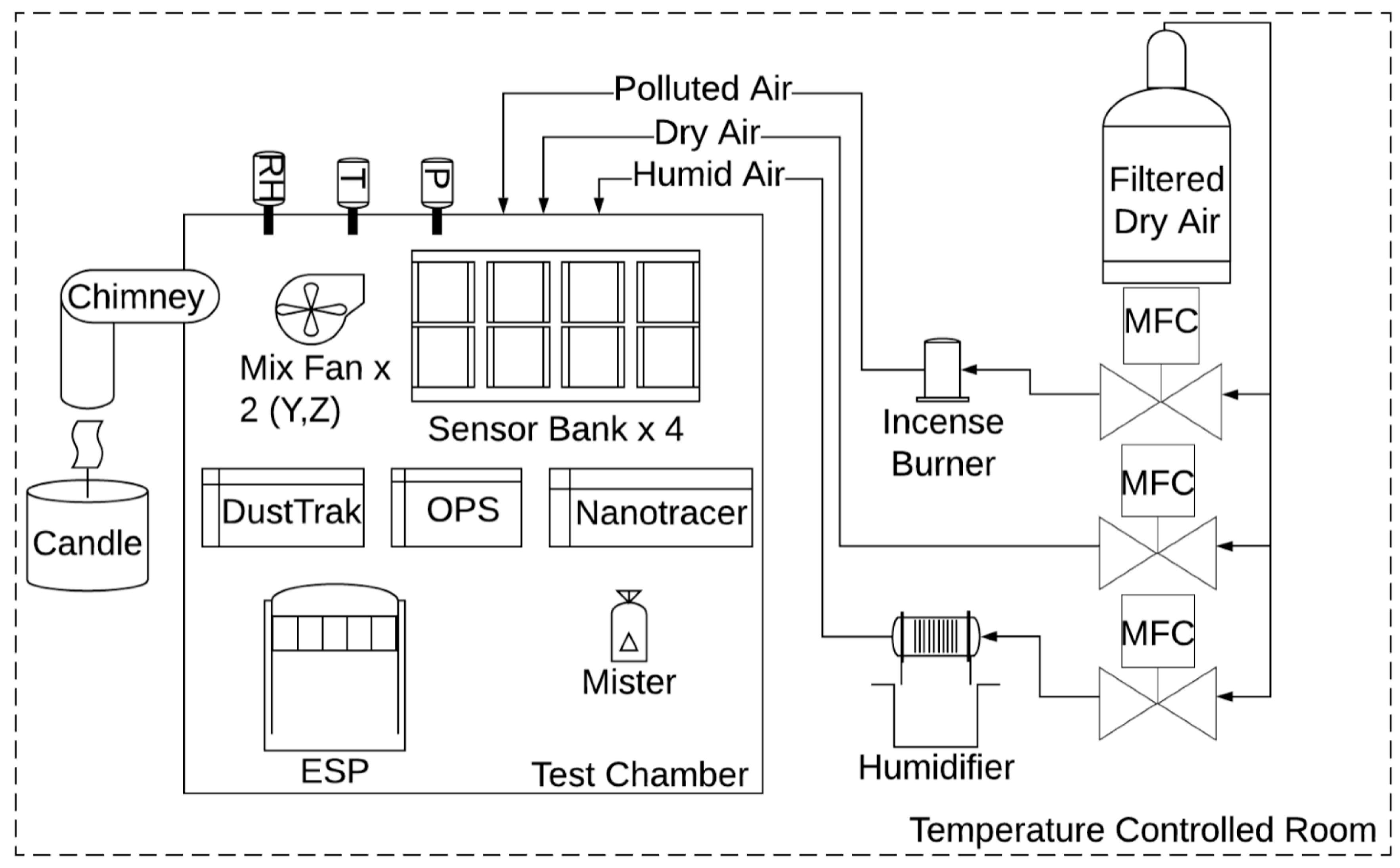
4.1. Laboratory Characterization
4.2. Field Characterization
4.3. Calibration of a Low-Cost PMS
5. LCPMS Basic Device Characteristics and Electronic Interfaces
5.1. Metrological Characteristics

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Manufacturer/Model/Ref | Type/Main Application | Main Measured Output Data | Measurement Range (µg/m3) | Concentration Resolution (µg/m3) | Working Temperature Range (°C) | Working Humidity Range (%RH Noncondensing) | Error | Particle Diameter Resolution or Range (µm) | Manufacturer Calibration (or Other Laboratory Tests) | Raw Data Availability |
|---|---|---|---|---|---|---|---|---|---|---|
| Alphasense/OPC/N2/ [81,82,93,94,97,98,114,126,127,128] | Particulate monitor/outdoor | PM1, PM2.5, and PM10 | 10000 (particles/second) | 0.01 | −20 to +50 | 0–95% | NA | 0.38–17 | Method defined by European Standard EN 481/TSI3330-GRIMM1.108 comparison | 16 bins/1.4 to 10 μm/modifiable particle density value |
| Honeywell/HPMA115S0-XXX/ [67,122,129,130] | Laser-based light scattering particle sensing/indoor-automotive | PM2.5 PM10 | 0–1000 | 1 | −20 to +50 | 0–95% | PM2.5: 0–100 ± 15 µg/m3 PM2.5: 100–1000 µg/m3 ± 15% | NA | NA | Customer adjustment coefficient |
| Inovafitness/SDS011/ [57,67,82,113] | Laser based PM2.5;10 sensor/indoor | PM2.5, PM10 | 0–1000 | 0.3 | −10 to +50 | 0–70% | Maximum between ± 15% and ± 10 μg/m3 | 0.3–10 | NA | NO |
| Plantower/PMS 1003/ [80,131] | Laser based particle concentration sensor/indoor | PM 1, PM2.5, PM10 | 0–500 | 1 | −10 to +60 | 0–99% | 100-500 μg/m3 ± 10% 0–100 ± 10 μg/m3 | 0.3 | Standard particles/atmospheric environment | 6 bin particle number; standard particles concentration atmospheric environment concentration |
| Plantower/PMS 7003/ [55,81,82,124,129] | Laser based particle concentration sensor/indoor | PM 1, PM2.5, PM10 | 0–500 | 1 | −10 to +60 | 0–99% | 100–500 μg/m3 ± 10% 0–100 ± 10 μg/m3 | 0.3 | Standard particles/atmospheric environment | 6 bins particle number; standard particles conc/atmospheric environment conc |
| Plantower/PMS A003/ [76,125] | Laser based particle concentration sensor/indoor | PM 1, PM2.5, PM10 | 0–500 | 1 | −10 to +60 | 0–99% | 100–500 μg/m3 ± 10% 0–100 ± 10 μg/m3 | 0.3 | Standard particles/atmospheric environment | 6 bin particle number; standard particles conc/atmospheric environment conc |
| Sensirion/SPS30/ [118,132] | Particulate matter sensor/indoor–outdoor | PM1.0, PM2.5, PM4, PM10 | 0–1000 | 1 | 10 to +40 | 20–80% | PM1, PM2.5: 0–100 ± 10 μg/m3 100–1000 μg/m3 ± 10% PM4, PM10: 0–100 ± 25 μg/m3 100–1000 μg/m3 ± 25% | 0.3 | PM2.5 mass concentration calibrated to TSI DustTrak™ DRX 8533 Ambient Mode PM2.5 number concentration calibrated to TSI OPS 3330 | 5 bin particle number |
| Sharp/GP2Y1010AU0F/ [63,65,67,83,133,134,135,136] | Led based dust sensor/indoor | PM10 | 0–500 | Noise lim | −10 to +65 | NA | NA | NA | Cigarette smoke reference: dust monitor (P-5L2: manufactured by SHIBATA SCIENTIFIC TECHNOLOGY LTD) | NA |
| Shinyei/PMS1/ [98,137] | Particulate sensor/- | PM 2.5 | 0–200 | NA | −10 to +45 | 20–85% | NA | 0.3 | NA | NA |
| Shinyei/PPD20V/ [138,139] | /indoor | PM10 (pcs/liter) | 0–30,000 (pcs/l) | NA | 0 to +40 | 0–95% | NA | 1 | Cigarette smoke, concentration reference: Rion Kc01/drop test, vibration, high temperature and humidity endurance | Yes |
| Shinyei/PPD42NJ/ [63,138,140] | Particle sensor unit/indoor | PM2.5, PM10 | 0–8000 (pcs/283 ml = 0.01cf) | NA | 0 to +45 | 0–95% | NA | 1 | Cigarette smoke, weight concentration reference: sibata LD5 reference, concentration reference: Rion Kc01/drop test, vibration, high temperature and humidity endurance, | NA |
| Shinyei/PPD60PV-T2/ [139,141] | Particulate sensor/indoor | PM10 (pcs/l) detects air borne particles from cleanliness class 100000–1000000 | 0–20000 (pcs/283 mL(0.01 cf) (0.5 um range particle)) | NA | 0 to +45 | 0–95% | NA | 0.5 | Cigarette smoke, concentration reference: Rion Kc01/drop test, vibration, high temperature and humidity endurance | Yes |
| Winsen/ZH03/ZH03A/ZH03B/ [67,82,142] | Particle sensor PM2.5 dust sensor/indoor | PM1.0, PM2.5, PM10 | 0-1000 | NA | −10 to +50 | 0–85% | NA | 0.3 | NA | NA |
5.2. Technical Characteristics
5.3. Applications
- IoT distributed applications. These applications require the use of devices that have low average consumption during the acquisition phase, can be placed into a low power state, and allow the regulation of the intensity of the laser. Depending on the application, the devices in this group can match the low power requirements if properly managed.
- Sensor flexibility. Some applications require the device to operate under conditions that could differ from those used to calibrate the sensor. This group includes devices that are claimed to be endowed with one or more of the following characteristics: high quality factory calibration, the ability to regulate the calibration, the availability of raw data, and a number of bins for the output data.
- On board integration complexity. This parameter is related to the complexity of the integration process of the sensor on a custom acquisition board or equipment. For example, some sensors require the output signal to be conditioned by custom hardware, while others are provided with embedded signal conditioning hardware. In the former case, the designer has more flexibility, but additional hardware is required; in the latter, less effort is required for the integration of the device on the acquisition board. It is also important to choose a proper sensor while considering the environment in which it will be deployed since some factors can negatively affect the measurements, such as droplets, fog, vibrations, wind, direct light, dew, temperature, humidity, soot, grit, air-flow rate obstruction, the mounting environment, the mounting position, and orientation. In this area, the availability of advanced sensor cases is often a key issue. In general, the main parameters required to choose a sensor in this group are the presence of a fan, the presence of signal conditioning hardware, case completeness, factory calibration, and additional onboard sensors (e.g., temperature/humidity sensors and a fan tachometer).
- Applications that require advanced metrological properties. This group includes sensors that can provide thorough information on measurement errors, resolution, and the range of concentrations that can be detected.
6. LCPMS Performance Literary Review
6.1. Methodology
- Accuracy: A measure of the overall agreement of a measurement with a known value (i.e., an accepted reference value). Along with bias, the R2 coefficient of a regression model predictions, hereby listed, is a generally accepted measure of the calibrated instrument potential accuracy. Its value may range from -∞ to 1.
- Precision: A measure of the agreement among repeated measurements of the same property under identical or substantially similar conditions, calculated either as the range or as the standard deviation.
- Bias: The systematic or persistent distortion of a measurement process that causes errors in one direction.
- Completeness: A measure of the amount of the valid data that needs to be obtained from a measurement system.
- Detection limit: The lowest analyte level that can be confidently identified.
- Measurement range: The minimum to maximum concentration range that the instrument is capable of measuring.
6.2. Performance Review Results
6.2.1. Alphasense N2
6.2.2. Plantower Family
6.2.3. Novasense SDS011
6.2.4. Sharp GPD2y1010AU0F
6.2.5. Shinyei Family
6.2.6. Other Sensors
- Relative humidity is a crucial environmental parameter, and keeping the humidity lower than 85% is important to avoid a rapid degradation in accuracy
- Using high sampling times and averaging the data increase the accuracy of PM measurements, especially at low PM concentrations ( 30 μg for PM2.5), where LCPMS suffers from the worst accuracy.
- All LCPMS sensors showed the best performance with PM 2.5.
- The default calibration for an LCPMS is only a recommendation and provides good accuracy only under restricted conditions.
- Within the same brand and model of LCPMS, the quality parameters can vary. Therefore, a laboratory test is mandatory to verify the quality parameters for each sensor.
- Specific seasonal calibrations in the field are necessary to achieve the best performance, despite changes in PM typology and humidity interference.
7. Discussion and Conclusions
Supplementary Materials
Funding
Conflicts of Interest
Abbreviations
| AQ | Air quality |
| DQO | Data quality objective |
| LCPMS | Low-cost PM (PM1, PM2.5, PM10) sensors |
| MMAD | Mass median aerodynamic diameter |
| MNB | Mean normalized bias |
| MNE | Mean normalized error |
| MLP | Multilayer perceptron |
| OPCs | Optical particle counters |
| PM | Particulate matters |
| RSs | Regulatory stations |
| RH | Relative humidity |
| TSP | Total suspended particles |
| HVAC | Heating ventilation air conditioning |
| IoT | Internet of Things |
References
- Haklay, M.; Eleta, I. On the front line of community-led air quality monitoring. In Integrating Human Health into Urban and Transport Planning; Springer: Cham, Switzeland, 2019; pp. 563–580. [Google Scholar]
- Dowthwaite, L.; Sprinks, J. Citizen science and the professional-amateur divide: Lessons from differing online practices. J. Sci. Commun. 2019, 18. [Google Scholar] [CrossRef]
- EPA. Criteria Air Pollutants. Available online: https://www.epa.gov/criteria-air-pollutants (accessed on 30 September 2019).
- Searched Topics: PM Pollution, NO2 Pollution, CO Pollution, PM Pollution, O3 Pollution. Available online: https://trends.google.com/trends (accessed on 30 September 2019).
- Kim, K.-H.; Kabir, E.; Kabir, S. A review on the human health impact of airborne particulate matter. Environ. Int. 2015, 74, 136–143. [Google Scholar] [CrossRef] [PubMed]
- Fattorini, D.; Regoli, F. Role of the chronic air pollution levels in the Covid-19 outbreak risk in Italy. Environ. Pollut. 2020, 264, 114732. [Google Scholar] [CrossRef] [PubMed]
- Yongjian, Z.; Jingu, X.; Fengming, H.; Liqing, C. Association between short-term exposure to air pollution and COVID-19 infection: Evidence from China. Sci. Total Environ. 2020, 727, 138704. [Google Scholar] [CrossRef]
- Wu, X.; Nethery, R.C.; Sabath, M.B.; Braun, D.; Dominici, F. Exposure to air pollution and COVID-19 mortality in the United States: A nationwide cross-sectional study. MedRxiv 2020. [Google Scholar] [CrossRef] [Green Version]
- EPA. Clean Air Act Text. Available online: https://www.epa.gov/clean-air-act-overview/clean-air-act-text (accessed on 30 September 2019).
- EEA. Environmental Policy Document Catalogue. Available online: https://www.eea.europa.eu/policy-documents/directive-2008–50-ec-of (accessed on 30 September 2019).
- EEA. Air Quality in Europe. Available online: https://www.eea.europa.eu/publications/air-quality-in-europe-2018 (accessed on 30 September 2019).
- Committee on Environment, Natural Resources, and Sustainability of the National Science and Technology Council. Air Quality Observation Systems in the United States. Available online: https://obamawhitehouse.archives.gov/sites/default/files/microsites/ostp/NSTC/air_quality_obs_2013.pdf (accessed on 30 September 2019).
- Xie, X.; Semanjski, I.; Gautama, S.; Tsiligianni, E.; Deligiannis, N.; Rajan, R.T.; Pasveer, F.; Philips, W. A review of urban air pollution monitoring and exposure assessment methods. ISPRS Int. J. Geo Inf. 2017, 6, 389. [Google Scholar] [CrossRef] [Green Version]
- Wroblewski, A.; Mathe, F. Theme Modelisation et Traitements Numeriques-Etude N 6/5 2011 Bilan du Parc de Stations de Mesure D’aasqa Impliquees dans la Modelisation. France, 2011. Available online: https://www.lcsqa.org/system/files/rf_bilan_parc_stations_modelisation_annexes_2011.pdf (accessed on 25 November 2020).
- De Vries, J.; Loenen, E.; Mijling, B.; van der Meulen, W.; van der Meer, A. Satellite and local measurements based services for air quality improvement. Asian J. Atmos. Environ. 2019, 13, 39–44. [Google Scholar] [CrossRef]
- Singh, K. Air pollution modeling. Int. J. Adv. Res. Ideas Innov. Technol. 2018, 4, 208–214. [Google Scholar]
- Di Sabatino, S.; Buccolieri, R.; Kumar, P. Spatial distribution of air pollutants in cities. In Clinical Handbook of Air Pollution-Related Diseases; Springer: Cham, Switzeland, 2018; pp. 75–95. [Google Scholar]
- Kumar, P.; Morawska, L.; Martani, C.; Biskos, G.; Neophytou, M.; Di Sabatino, S.; Bell, M.; Norford, L.; Britter, R. The rise of low-cost sensing for managing air pollution in cities. Environ. Int. 2015, 75, 199–205. [Google Scholar] [CrossRef] [Green Version]
- EPA. List of Designated Reference and Equivalent Methods. 15 June 2020. Available online: https://www.epa.gov/sites/production/files/2019-08/documents/designated_reference_and-equivalent_methods.pdf (accessed on 23 November 2020).
- Morawska, L.; Thai, P.K.; Liu, X.; Asumadu-Sakyi, A.; Ayoko, G.; Bartonova, A.; Bedini, A.; Chai, F.; Christensen, B.; Dunbabin, M.; et al. Applications of low-cost sensing technologies for air quality monitoring and exposure assessment: How far have they gone? Environ. Int. 2018, 116, 286–299. [Google Scholar] [CrossRef]
- UIA. Air Quality. Available online: https://www.uia-initiative.eu/en/air-quality (accessed on 30 September 2019).
- EPA. Deliberating Performance Targets for Air Quality Sensors Workshops. Available online: https://www.epa.gov/air-research/deliberating-performance-targets-air-quality-sensors-workshops (accessed on 23 November 2020).
- Castell, N.; Dauge, F.R.; Schneider, P.; Vogt, M.; Lerner, U.; Fishbain, B.; Broday, D.; Bartonova, A. Can commercial low-cost sensor platforms contribute to air quality monitoring and exposure estimates? Environ. Int. 2017, 99, 293–302. [Google Scholar] [CrossRef] [PubMed]
- Ahern, D.M. Regulatory arbitrage in a fintech world: Devising an optimal; EU regulatory response to crowdlending. Eur. Bank. Inst. Res. Paper Ser. 2018. [Google Scholar] [CrossRef]
- Clements, A.L.; Reece, S.; Conner, T.; Williams, R. Observed data quality concerns involving low-cost air sensors. Atmos. Environ. X 2019, 3, 100034. [Google Scholar] [CrossRef]
- Hasenfratz, D.; Saukh, O.; Walser, C.; Hueglin, C.; Fierz, M.; Arn, T.; Beutel, J.; Thiele, L. Deriving high-resolution urban air pollution maps using mobile sensor nodes. Pervasive Mob. Comput. 2015, 16, 268–285. [Google Scholar] [CrossRef]
- Rai, A.C.; Kumar, P.; Pilla, F.; Skouloudis, A.N.; Di Sabatino, S.; Ratti, C.; Yasar, A.; Rickerby, D. End-user perspective of low-cost sensors for outdoor air pollution monitoring. Sci. Total Environ. 2017, 607, 691–705. [Google Scholar] [CrossRef] [Green Version]
- Madou, M.J.; Morrison, S.R. Chemical Sensing with Solid State Devices; Elsevier: New York, NY, USA, 2012. [Google Scholar]
- Hunter, G.W.; Akbar, S.; Bhansali, S.; Daniele, M.; Erb, P.D.; Johnson, K.; Manickam, P. Choice—Critical review—A Critical review of solid state gas sensors. J. Electr. Soc. 2020, 167, 037570. [Google Scholar] [CrossRef]
- Dai, Z.; Liang, T.; Lee, J.H. Gas sensors using ordered macroporous oxide nanostructures. Nanoscale Adv. 2019, 1, 1626–1639. [Google Scholar] [CrossRef] [Green Version]
- Budde, M.; Busse, M.; Beigl, M. Investigating the Use of Commodity Dust Sensors for the Embedded Measurement of Particulate Matter. In Proceedings of the 2012 Ninth International Conference on Networked Sensing (INSS) US, Antwerp, Belgium, 11–14 June 2012; pp. 1–4. [Google Scholar]
- McKercher, G.R.; Salmond, J.A.; Vanos, J.K. Characteristics and applications of small, portable gaseous air pollution monitors. Environ. Pollut. 2017, 223, 102–110. [Google Scholar] [CrossRef] [Green Version]
- Kuklinska, K.; Wolska, L.; Namiesnik, J. Air quality policy in the US and the EU–A review. Atmos. Pollut. Res. 2015, 6, 129–137. [Google Scholar] [CrossRef]
- EPA. Table of Historical Particulate Matter (PM) National Ambient Air Quality Standards (NAAQS). Available online: https://www.epa.gov/pm-pollution/table-historical-particulate-matter-pm-national-ambient-air-quality-standards-naaqs (accessed on 23 November 2019).
- Environmental Protection Agency (EPA). Revisions to the National Ambient Air Quality Standards for Particulate Matter. Federal Regist. 1987, 52, 24634–24669. [Google Scholar]
- Environmental Protection Agency (EPA). National Ambient Air Quality Standards for Particulate Matter. Federal Regist. 1997, 62, 25998–26040. [Google Scholar]
- McClellan, R.O. Setting ambient air quality standards for particulate matter. Toxicology 2002, 181, 329–347. [Google Scholar] [CrossRef]
- Snider, G.; Weagle, C.L.; Murdymootoo, K.K.; Ring, A.; Ritchie, Y.; Stone, E.; Walsh, A.; Akoshile, C.; Anh, N.X.; Balasubramanian, R.; et al. Variation in global chemical composition of PM2.5: Emerging results from SPARTAN. Atmos. Chem. Phys. Discuss 2016. [Google Scholar] [CrossRef] [Green Version]
- Mauderly, J.L.; Chow, J.C. Health effects of organic aerosols. Inhal. Toxicol. 2008, 20, 257–288. [Google Scholar] [CrossRef] [PubMed]
- Mauderly, J.L. Diesel emissions: Is more health research still needed? Toxicol. Sci. 2001, 62, 6–9. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wiseman, C.L.; Zereini, F. Airborne particulate matter, platinum group elements and human health: A review of recent evidence. Sci. Total Environ. 2009, 407, 2493–2500. [Google Scholar] [CrossRef] [PubMed]
- Li, Z.; Wen, Q.; Zhang, R. Sources, health effects and control strategies of indoor fine particulate matter (PM2.5): A review. Sci. Total Environ. 2017, 586, 610–622. [Google Scholar] [CrossRef]
- Dacunto, P.J.; Cheng, K.-C.; Acevedo-Bolton, V.; Jiang, R.-T.; Klepeis, N.E.; Repace, J.L.; Ott, W.R.; Hildemann, L.M. Real-time particle monitor calibration factors and PM2.5 emission factors for multiple indoor sources. Environ. Sci. Proc. Impacts 2013, 15, 1511–1519. [Google Scholar] [CrossRef]
- Taner, S.; Pekey, B.; Pekey, H. Fine particulate matter in the indoor air of barbeque restaurants: Elemental compositions, sources and health risks. Sci. Environ. 2013, 454, 79–87. [Google Scholar] [CrossRef]
- Gao, J.; Cao, C.; Wang, L.; Song, T.; Zhou, X.; Yang, J.; Zhang, X. Determination of size-dependent source emission rate of cooking-generated aerosol particles at the oil-heating stage in an experimental kitchen. Aerosol Air Q. Res. 2012, 13, 488–496. [Google Scholar] [CrossRef] [Green Version]
- Park, J.; Ham, S.; Jang, M.; Lee, J.; Kim, S.; Kim, S.; Lee, K.; Park, D.; Kwon, J.; Kim, H.; et al. Spatial–temporal dispersion of aerosolized nanoparticles during the use of consumer spray products and estimates of inhalation exposure. Environ. Sci. Technol. 2017, 51, 7624–7638. [Google Scholar] [CrossRef] [PubMed]
- Source Profiles for Europe Database. Available online: https://source-apportionment.jrc.ec.europa.eu/Specieurope/sources.aspx (accessed on 30 September 2019).
- GUIDANCE ON PM2.5 MEASUREMENT UNDER DIRECTIVE 1999/30/EC. Available online: https://ec.europa.eu/environment/archives/cafe/pdf/steering_technical_group/guidancepm.pdf (accessed on 23 November 2020).
- Gilliam, J.; Hall, E. Reference and Equivalent Methods Used to Measure National Ambient Air Quality Standards (NAAQS) Criteria Air Pollutants—Volume, I.; US. Environmental Protection Agency: Washington, DC, USA, 2016.
- Hall, E.S.; Kaushik, S.M.; Vanderpool, R.W.; Duvall, R.M.; Beaver, M.R.; Long, R.W.; Solomon, P.A. Integrating sensor monitoring technology into the current air pollution regulatory support paradigm: Practical considerations. Am. J. Environ. Eng. 2014, 4, 147–154. [Google Scholar] [CrossRef]
- Sorensen, C.M.; Gebhart, J.; O’Hern, T.J.; Rader, D.J. Optical Measurement Techniques: Fundamentals and Applications in Aerosol Measurement: Principles, Techniques and Applications, 3rd ed.; Kulkarni, P., Baron, P.A., Willeke, K., Eds.; John Wiley & Sons: Hoboken, NJ, USA, 2011; pp. 269–312. [Google Scholar]
- Webb, P.A. Particle Sizing by Static Laser Light Scattering, Technical Workshop Series Micromeritics; Micromeritics Instrument Corp: Norcross, GA, USA, 2000. [Google Scholar]
- Friedlander, S.K. Smoke, Dust, and Haze; Oxford University Press: New York, NY, USA, 2000; p. 198. [Google Scholar]
- Mie, G. Beiträge zur optik trüber medien, speziell kolloidaler metallösungen. Ann. Phys. 1908, 330, 377–445. [Google Scholar] [CrossRef]
- Wang, K.; Chen, F.-E.; Au, W.; Zhao, Z.; Xia, Z.-L. Evaluating the feasibility of a personal particle exposure monitor in outdoor and indoor microenvironments in Shanghai, China. Int. J. Environ. Health Res. 2019, 29, 209–220. [Google Scholar] [CrossRef] [PubMed]
- Papapostolou, V.; Zhang, H.; Feenstra, B.J.; Polidori, A. Development of an environmental chamber for evaluating the performance of low-cost air quality sensors under controlled conditions. Atmos. Environ. 2017, 171, 8290. [Google Scholar] [CrossRef]
- Cavaliere, A.; Carotenuto, F.; Di Gennaro, F.; Gioli, B.; Gualtieri, G.; Martelli, F.; Matese, A.; Toscano, P.; Vagnoli, C.; Zaldei, A. Development of low-cost air quality stations for next generation monitoring networks: Calibration and validation of PM2.5 and PM10 sensors. Sensors 2018, 18, 2843. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chigier, N.; Stewart, G. Guest Editorial Particle Sizing and Spray Analysis. Opt. Eng. 1984, 23, 235554. [Google Scholar] [CrossRef] [Green Version]
- Agranovski, I. Aerosols: Science and Technology; John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar]
- Janka, K.; Kivistö, T.; Mäkynen, J. Pulse interval and pulse width measurements in determining the flow characteristics in the viewing volume of single particle optical counters. J. Aerosol Sci. 1982, 13, 451–457. [Google Scholar] [CrossRef]
- Saputra, C.; Munir, M.M.; Waris, A. Digital pulse analyzer for simultaneous measurement of pulse height, pulse width, and interval time on an optical particle counter. Meas. Sci. Technol. 2020, 31, 065901. [Google Scholar] [CrossRef]
- Carratù, M.; Ferro, M.; Paciello, V.; Sommella, P.; Lundgren, J.; O’Nils, M. Wireless Sensor Network Calibration for PM10 Measurement. In Proceedings of the IEEE International Conference on Computational Intelligence and Virtual Environments for Measurement Systems and Applications (CIVEMSA), Tunis, Tunisia, 22–24 June 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Wang, Y.; Li, J.; Jing, H.; Zhang, Q.; Jiang, J.; Biswas, P. Laboratory evaluation and calibration of three low-cost particle sensors for particulate matter measurement. Aerosol Sci. Technol. 2015, 49, 1063–1077. [Google Scholar] [CrossRef]
- Austin, E.; Novosselov, I.; Seto, E.; Yost, M.G. Laboratory evaluation of the Shinyei PPD42NS low-cost particulate matter sensor. PLoS ONE 2015, 10, e0137789. [Google Scholar] [CrossRef] [Green Version]
- Sousan, S.; Koehler, K.; Thomas, G.; Park, J.H.; Hillman, M.; Halterman, A.; Peters, T.M. Inter-comparison of low-cost sensors for measuring the mass concentration of occupational aerosols. Aerosol Sci. Technol. 2016, 50, 462–473. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- AQSPEC Field Evaluation. Available online: http://www.aqmd.gov/aq-spec/evaluations/field (accessed on 10 November 2020).
- Hapidin, D.A.; Saputra, C.; Maulana, D.S.; Munir, M.M.; Khairurrijal, K. Aerosol chamber characterization for commercial particulate matter (pm) sensor evaluation. Aerosol Air Q. Res. 2019, 19, 181–194. [Google Scholar] [CrossRef] [Green Version]
- Ahn, K.H.; Lee, H.; Lee, H.D.; Kim, S.C. Extensive evaluation and classification of low-cost dust sensors in laboratory using a newly developed test method. Indoor Air 2020, 30, 137–146. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Omidvarborna, H.; Kumar, P.; Tiwari, A. Envilution™’chamber for performance evaluation of low-cost sensors. Atmos. Environ. 2020, 223, 117264. [Google Scholar] [CrossRef]
- Bulot, F.M.J.; Russell, H.S.; Rezaei, M.; Johnson, M.S.; Ossont, S.J.J.; Morris, A.K.R.; Cox, S.J. Laboratory comparison of low-cost particulate matter sensors to measure transient events of pollution. Sensors 2020, 20, 2219. [Google Scholar] [CrossRef] [Green Version]
- Vercellino, R.J.; Sleeth, D.K.; Handy, R.G.; Min, K.T.; Collingwood, S.C. Laboratory evaluation of a low-cost, real-time, aerosol multi-sensor. J. Occup. Environ. Hyg. 2018, 15, 559–567. [Google Scholar] [CrossRef]
- Jovašević-Stojanović, M.; Bartonova, A.; Topalović, D.; Lazović, I.; Pokrić, B.; Ristovski, Z. On the use of small and cheaper sensors and devices for indicative citizen-based monitoring of respirable particulate matter. Environ. Pollut. 2015, 206, 696–704. [Google Scholar] [CrossRef]
- Mikheev, V.B.; Ivanov, A.; Lucas, E.A.; South, P.L.; Colijn, H.O.; Clark, P.I. Aerosol size distribution measurement of electronic cigarette emissions using combined differential mobility and inertial impaction methods: Smoking machine and puff topography influence. Aerosol Sci. Technol. 2018, 52, 1233–1248. [Google Scholar] [CrossRef]
- Bertholon, J.F.; Becquemin, M.H.; Roy, M.; Roy, F.; Ledur, D.; Annesi-Maesano, I.; Dautzenberg, B. Particle sizes of aerosols produced by nine indoor perfumes and deodorants. Int. J. Environ. Monit. Anal. 2015, 3, 377–381. [Google Scholar] [CrossRef] [Green Version]
- Johnson, K.K.; Bergin, M.H.; Russell, A.G.; Hagler, G.S. Using low cost sensors to measure ambient particulate matter concentrations and on-road emissions factors. Atmos. Meas. Tech. Dis. 2016, 1–22. [Google Scholar] [CrossRef] [Green Version]
- Levy Zamora, M.; Xiong, F.; Gentner, D.; Kerkez, B.; Kohrman-Glaser, J.; Koehler, K. Field and laboratory evaluations of the low-cost Plantower particulate matter sensor. Environ. Sci. Technol. 2018, 53, 838–849. [Google Scholar] [CrossRef] [PubMed]
- Mainelis, G.; Berry, D.; An, H.R.; Yao, M.; DeVoe, K.; Fennell, D.E.; Jaeger, R. Design and performance of a single-pass bubbling bioaerosol generator. Atmos. Environ. 2005, 39, 3521–3533. [Google Scholar] [CrossRef]
- Terzano, C. Metered dose inhalers and spacer devices. Eur. Rev. Med. Pharmacol. Sci. 1999, 3, 159–170. [Google Scholar] [PubMed]
- Zhang, R.; Song, X.; Zhan, S.; Hu, J.; Tan, W. Investigation of influence factors on particle size measurement with pMDI. In Biomedical Research; Allied Academies: London, UK, 2017. [Google Scholar]
- Sayahi, T.; Butterfield, A.; Kelly, K. Long-term field evaluation of the Plantower PMS low-cost particulate matter sensors. Environ. Pollut. 2019, 245, 932–940. [Google Scholar] [CrossRef] [PubMed]
- Bulot, F.M.; Johnston, S.J.; Basford, P.J.; Easton, N.H.; Apetroaie-Cristea, M.; Foster, G.L.; Morris, A.K.; Cox, S.J.; Loxham, M. Long-term field comparison of multiple low-cost particulate matter sensors in an outdoor urban environment. Sci. Rep. 2019, 9, 1–13. [Google Scholar] [CrossRef]
- Badura, M.; Batog, P.; Drzeniecka-Osiadacz, A.; Modzel, P. Evaluation of low-cost sensors for ambient PM2.5 monitoring. J. Sensors 2018, 2018. [Google Scholar] [CrossRef] [Green Version]
- Alvarado, M.; Gonzalez, F.; Fletcher, A.; Doshi, A. Towards the development of a low cost airborne sensing system to monitor dust particles after blasting at open-pit mine sites. Sensors 2015, 15, 19667–19687. [Google Scholar] [CrossRef] [Green Version]
- AQSPEC Field Test Protocols. Available online: http://www.aqmd.gov/docs/default-source/aq-spec/protocols/sensors-field-testing-protocol.pdf?sfvrsn=0 (accessed on 10 November 2020).
- AQSPEC PM Sensing Performance Report. Available online: http://www.aqmd.gov/aq-spec/evaluations/summary-pm (accessed on 10 November 2020).
- Rai, P.K. Multifaceted health impacts of particulate matter (pm) and its management: An overview. Environ. Skept. Critic 2015, 4, 1–26. [Google Scholar]
- EPA. Air Sensor Toolbox. Available online: https://www.epa.gov/air-sensor-toolbox (accessed on 10 November 2020).
- Ferlito, S.; Bosso, F.; De Vito, S.; Esposito, E.; Di Francia, G. LSTM Networks for Particulate Matter Concentration Forecasting in AISEM Annual Conference on Sensors and Microsystems; Springer: Cham, Switzeland, 2019; pp. 409–415. [Google Scholar]
- Lewis, A.; Peltier, W.R.; von Schneidemesser, E. Low-Cost Sensors for the Measurement of Atmospheric Composition: Overview of Topic and Future Applications; World Meteorological Organization (WMO): Geneva, Switzeland, 2018. [Google Scholar]
- Holstius, D.M.; Pillarisetti, A.; Smith, K.; Seto, E. Field calibrations of a low-cost aerosol sensor at a regulatory monitoring site in California. Atmos. Meas. Tech. Dis. 2014, 7, 605–632. [Google Scholar] [CrossRef]
- Reece, S.; Williams, R.; Colón, M.; Huertas, E.; O’Shea, M.; Sheridan, P.; Wyrzykowska, B. Low Cost Air Quality Sensor Deployment and Citizen Science: The Peñuelas Project. In Proceedings of the 4th International Electronic Conference on Sensors and Applications, Basel, Switzerland, 15–30 November 2017. [Google Scholar]
- Gao, M.; Cao, J.; Seto, E. A distributed network of low-cost continuous reading sensors to measure spatiotemporal variations of PM2.5 in Xi’an, China. Environ. Pollut. 2015, 199, 56–65. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Crilley, L.R.; Shaw, M.; Pound, R.; Kramer, L.J.; Price, R.; Young, S.; Lewis, A.C.; Pope, F.D. Evaluation of a low-cost optical particle counter (Alphasense OPC-N2) for ambient air monitoring. Atmos. Meas. Tech. 2018, 709–720. [Google Scholar] [CrossRef] [Green Version]
- Di Antonio, A.; Popoola, O.A.; Ouyang, B.; Saffell, J.; Jones, R.L. Developing a relative humidity correction for low-cost sensors measuring ambient particulate matter. Sensors 2018, 18, 2790. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gysel, M.; Crosier, J.; Topping, D.; Whitehead, J.; Bower, K.; Cubison, M.; Williams, P.; Flynn, M.; McFiggans, G.; Coe, H. Closure study between chemical composition and hygroscopic growth of aerosol particles during TORCH2. In Nucleation and Atmospheric Aerosols; Springer: Cham, Switzeland, 2007. [Google Scholar]
- Zheng, T. Field evaluation of low-cost particulate matter sensors in high and low concentration environments. Ph.D. Thesis, Duke University, Durham, NC, USA, 2018. [Google Scholar]
- Feinberg, S.N.; Williams, R.; Hagler, G.; Low, J.; Smith, L.; Brown, R.; Garver, D.; Davis, M.; Morton, M.; Schaefer, J.; et al. Examining spatiotemporal variability of urban particulate matter and application of high-time resolution data from a network of low-cost air pollution sensors. Atmos. Environ. 2019, 213, 579–584. [Google Scholar] [CrossRef]
- Feinberg, S.; Williams, R.; Hagler, G.S.; Rickard, J.; Brown, R.; Garver, D.; Harshfield, G.; Stauffer, P.; Mattson, E.; Judge, R.; et al. Long-term evaluation of air sensor technology under ambient conditions in Denver, Colorado. Atmos. Meas. Tech. 2018, 11, 4605. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tittarelli, A.; Borgini, A.; Bertoldi, M.; De Saeger, E.; Ruprecht, A.; Stefanoni, R.; Tagliabue, G.; Contiero, P.; Crosignani, P. Estimation of particle mass concentration in ambient air using a particle counter. Atmos. Environ. 2008, 42, 8543–8548. [Google Scholar] [CrossRef]
- Hojaiji, H.; Kalantarian, H.; Bui, A.A.; King, C.E.; Sarrafzadeh, M. Temperature and humidity calibration of a low-cost wireless dust sensor for real-time monitoring. In Proceedings of the 2017 IEEE Sensors Applications Symposium (SAS), Glassboro, NJ, USA, 13–15 March 2017; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Borrego, C.; Ginja, J.; Coutinho, M.; Ribeiro, C.; Karatzas, K.; Sioumis, T.; Katsifarakis, N.; Konstantinidis, K.; De Vito, S.; Esposito, E.; et al. Assessment of air quality microsensors versus reference methods: The EuNetAir Joint Exercise–Part II. Atmos. Environ. 2018, 193, 127–142. [Google Scholar] [CrossRef]
- Chen, C.C.; Kuo, C.T.; Chen, S.Y.; Lin, C.H.; Chue, J.J.; Hsieh, Y.J.; Cheng, C.W.; Wu, C.M.; Huang, C.M. Calibration of low-cost particle sensors by using machine-learning method. In Proceedings of the 2018 IEEE Asia Pacific Conference on Circuits and Systems (APCCAS), Chengdu, China, 26–30 October 2018; pp. 111–114. [Google Scholar] [CrossRef]
- Budde, M.; El Masri, R.; Riedel, T.; Beigl, M. Enabling low-cost particulate matter measurement for participatory sensing scenarios. In Proceedings of the 12th International Conference on Mobile and Ubiquitous Multimedia, Luleå, Sweden, 2–5 December 2013; pp. 1–10. [Google Scholar] [CrossRef] [Green Version]
- Kizel, F.; Etzion, Y.; Shafran-Nathan, R.; Levy, I.; Fishbain, B.; Bartonova, A.; Broday, D.M. Node-to-node field calibration of wireless distributed air pollution sensor network. Environ. Pollut. 2018, 233, 900–909. [Google Scholar] [CrossRef]
- Hasenfratz, D.; Saukh, O.; Thiele, L. On-the-Fly Calibration of Low-Cost Gas Sensors in European Conference on Wireless Sensor Networks; Springer: Cham, Switzeland, 2012; pp. 228–244. [Google Scholar]
- De Vito, S.; Esposito, E.; Castell, N.; Schneider, P.; Bartonova, A. On the robustness of field calibration for smart air quality monitors. Sensors Actuators B Chem. 2020, 310, 127869. [Google Scholar] [CrossRef]
- Zheng, T.; Bergin, M.H.; Sutaria, R.; Tripathi, S.N.; Caldow, R.; Carlson, D.E. Gaussian process regression model for dynamically calibrating a wireless low-cost particulate matter sensor network in Delhi. Atmos. Meas. Tech. Dis. 2019. [Google Scholar] [CrossRef] [Green Version]
- Bai, L.; Huang, L.; Wang, Z.; Ying, Q.; Zheng, J.; Shi, X.; Hu, J. Long-term Field Evaluation of Low-cost Particulate Matter Sensors in Nanjing. Aerosol Air Q. Res. 2020, 20, 242–253. [Google Scholar] [CrossRef]
- Lee, H.; Kang, J.; Kim, S.; Im, Y.; Yoo, S.; Lee, D. Long-Term Evaluation and Calibration of Low-Cost Particulate Matter (PM) Sensor. Sensors 2020, 20, 3617. [Google Scholar] [CrossRef] [PubMed]
- Zaidan, M.A.; Motlagh, N.H.; Fung, P.L.; Lu, D.; Timonen, H.; Kuula, J.; Niemi, J.V.; Tarkoma, S.; Petaja, T.; Kulmala, M.; et al. Intelligent Calibration and Virtual Sensing for Integrated Low-Cost Air Quality Sensors. IEEE Sensors J. 2020, 20, 13638–13652. [Google Scholar] [CrossRef]
- Si, M.; Xiong, Y.; Du, S.; Du, K. Evaluation and calibration of a low-cost particle sensor in ambient conditions using machine-learning methods. Atmos. Meas. Tech. 2020, 13, 1693–1707. [Google Scholar] [CrossRef] [Green Version]
- Wang, W.V.; Lung, S.C.; Liu, C. Application of Machine Learning for the in-Field Correction of a PM2.5 Low-Cost Sensor Network. Sensors 2020, 20, 5002. [Google Scholar] [CrossRef]
- Nova Sensor SDS011 Sensor Specification. Available online: https://www-sd-nf.oss-cn-beijing.aliyuncs. com/%E5%AE%98%E7%BD%91%E4%B8%8B%E8%BD%BD/SDS011%20laser%20PM2.5%20sensor%20specification-V1.4.pdf (accessed on 1 October 2019).
- Alphasense OPC-N2 Sensor Specification. Available online: https://stg-uneplive.unep.org/media/aqm_ document_v1/Blue%20Print/Components/Microcomputer%20and%20sensors/B.%20Dust%20Sensor%20Specifications/B.1%20Alphasense%20OPC%20N1/OPC-N2.pdf (accessed on 1 October 2019).
- Alphasense OPC-R1 Sensor Specification. Available online: http://www.alphasense.com/WEB1213/wpcontent/uploads/2019/08/OPC-R1.pdf (accessed on 1 October 2019).
- Alphasense OPC-N3 Sensor Specification. Available online: http://www.alphasense.com/WEB1213/wpcontent/uploads/2019/03/OPC-N3.pdf (accessed on 1 October 2019).
- Available online: https://tera-sensor.com/technology/ (accessed on 1 October 2020).
- Sensirion SPS30 Sensor Specification. Available online: https://www.sensirion.com/en/download-center/particulate-matter-sensors-pm/particulate-matter-sensor-sps30/ (accessed on 1 October 2019).
- Cubic. Laser Particle Sensor PM2008. Available online: http://en.gassensor.com.cn/ParticulateMatterSensor/ indoor/19/7/194/ (accessed on 1 October 2019).
- Cubic. Dust Sensor PM2009. Available online: http://en.gassensor.com.cn/ParticulateMatterSensor/indoor/19/7/196/ (accessed on 1 October 2019).
- Cubic. Outdoor Particulate Matter Measurement Technology. Available online: http://en.gassensor.com.cn/uploadfiles/2020/03/20200302112209222.pdf (accessed on 1 October 2019).
- Honeywell. HPM Series Particulate Matter Sensors. Available online: https://sensing.honeywell.com/honeywell-sensing-particulate-hpm-series-datasheet-32322550 (accessed on 1 October 2019).
- Cubic. Dust Sensor PM3006T. Available online: http://en.gassensor.com.cn/ParticulateMatterSensor/outdoor/19/9/208/ (accessed on 1 October 2019).
- Plantower PMS7003 Sensor Specification. Available online: https://download.kamami.com/p564008-p564008-PMS7003%20series%20data%20manua_English_V2.5.pdf (accessed on 21 November 2020).
- Plantower PMSA003 Sensor Specification. Available online: https://datasheet.lcsc.com/szlcsc/1810311017_Beijing-Plantower-PMSA003-A_C132744.pdf (accessed on 21 November 2020).
- Mukherjee, A.; Stanton, L.G.; Graham, A.R.; Roberts, P.T. Assessing the utility of low-cost particulate matter sensors over a 12-week period in the Cuyama valley of California. Sensors 2017, 17, 1805. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sousan, S.; Koehler, K.; Hallett, L.; Peters, T.M. Evaluation of the Alphasense optical particle counter (OPC-N2) and the Grimm portable aerosol spectrometer (PAS-1.108). Aerosol Sci. Technol. 2016, 50, 1352–1365. [Google Scholar] [CrossRef] [PubMed]
- Available online: http://www.alphasense.com/WEB1213/wp-content/uploads/2018/12/AAN-701-01.pdf (accessed on 29 November 2020).
- Johnston, S.J.; Basford, P.J.; Bulot, F.M.; Apetroaie-Cristea, M.; Easton, N.H.; Davenport, C.; Foster, G.L.; Loxham, M.; Morris, A.K.; Cox, S.J. City scale particulate matter monitoring using LoRaWAN based air quality IoT devices. Sensors 2019, 19, 209. [Google Scholar] [CrossRef] [Green Version]
- Báthory, C.; Kiss, M.L.; Trohák, A.; Dobó, Z.; Palotás, Á.B. Preliminary research for low-cost particulatematter sensor network in E3S Web of Conferences. EDP Sci. 2019, 100, 00004. [Google Scholar]
- Plantower PMS1003 Sensor Specification. Available online: http://www.aqmd.gov/docs/default-source/aqspec/resources-page/plantower-pms1003-manual_v2-5.pdf (accessed on 21 November 2020).
- Kuula, J.; Mäkelä, T.; Aurela, M.; Teinilä, K.; Varjonen, S.; Gonzales, O.; Timonen, H. Laboratory evaluation of particle size-selectivity of optical low-cost particulate matter sensors. Atmos. Meas. Tech. Dis. 2019, 1–21. [Google Scholar] [CrossRef]
- Li, J.; Li, H.; Ma, Y.; Wang, Y.; Abokifa, A.A.; Lu, C.; Biswas, P. Spatiotemporal distribution of indoor particulate matter concentration with a low-cost sensor network. Build. Environ. 2018, 127, 138–147. [Google Scholar] [CrossRef]
- Marinov, M.B.; Hensel, S.; Ganev, B.; Nikolov, G. Performance evaluation of low-cost particulate matter sensors. In Proceedings of the 2017 XXVI International Scientific Conference Electronics (ET), Sozopol, Bulgaria, 1–4 September 2017. [Google Scholar]
- Olivares, G.; Longley, I.; Coulson, G. Development of a Low-Cost Device for Observing Indoor Particle Levels Associated with Source Activities in the Home; International Society of Exposure Science (ISES): Seattle, WA, USA, 2012. [Google Scholar]
- Sharp GP2Y1010AU0F Sensor Specification. Available online: https://www.sharpsde.com/products/optoelectronic-components/model/GP2Y1010AU0F/#productview (accessed on 21 November 2020).
- Shinyei University. PM Sensor PMS1. Available online: https://www.shinyei.co.jp/stc/eng/optical/main_pm2.html (accessed on 21 November 2020).
- Johnson, K.K.; Bergin, M.H.; Russell, A.G.; Hagler, G.S. Field test of several low-cost particulate matter sensors in high and low concentration urban environments. Aerosol Air Q. Res. 2018, 18, 565–578. [Google Scholar] [CrossRef] [PubMed]
- Shinyei Kaisen PPD20V. Product Specification. Available online: http://c1170156.r56.cf3.rackcdn.com/UK_ SHN_PPD20V_DS.pdf (accessed on 21 November 2020).
- Shinyei PPD42NJ Sensor Specification. Available online: http://www.gvzcomp.it/index.php/it/shinyei?format=raw&task=download&fid=461 (accessed on 21 November 2020).
- Shinyei PPD60PV Sensor Specification. Available online: http://www.gvzcomp.it/index.php/en/shinyei? format=raw&task=download&fid=463 (accessed on 21 November 2020).
- Winsen. Laser Dust Module. Available online: https://www.winsen-sensor.com/d/files/air-quality/zh03- series-laser-dust-module-v2_0.pdf (accessed on 21 November 2020).
- Cubic. LED Particle Sensor PM1006K. Available online: http://en.gassensor.com.cn/ParticulateMatterSensor/ indoor/19/7/206/ (accessed on 1 October 2019).
- Telaire. Smart Dust Sensor SM-PWM-01c. Available online: https://amphenol-sensors.com/en/component/edocman/225-sm-pwm-01c-application-note/download?Itemid=8248%20%27 (accessed on 21 November 2020).
- Telaire. Smart Dust Sensor SM-PWM-01s. Available online: https://amphenol-sensors.com/en/component/edocman/478-telaire-sm-pwm-01s-smart-dust-sensor-datasheet/download?Itemid=8488 (accessed on 21 November 2020).
- Cubic. LED Particle Sensor PM1003. Available online: http://en.gassensor.com.cn/ParticulateMatterSensor/ indoor/19/7/205/ (accessed on 1 October 2019).
- Panasonic. LED Type PM2.5 Sensor Specification. Available online: https://industrial.panasonic.com/ww/products/sensors/built-in-sensors/dust-sensor/pm25_led (accessed on 21 November 2020).
- Samyoung S&G. PM2.5 Sensor. Available online: http://samyoungsnc.com/particle-sensor/ (accessed on 1 October 2019).
- Shinyei Technology. Particle Sensor Unit PPD71. Available online: https://www.shinyei.co.jp/stc/eng/optical/main_ppd71.html (accessed on 21 November 2020).
- Winsen ZPH01 Sensor Specification. Available online: https://www.winsen-sensor.com/d/files/PDF/Gas%20Sensor%20Module/PM2.5%20Detection%20Module/ZPH01%20Particles%20Sensor%20Module%20V1.0.pdf (accessed on 21 November 2020).
- Telaire. SM-UART-01D Dual Channel Dust Sensor. Available online: https://amphenol-sensors.com/en/component/edocman/477-telaire-sm-uart-01d-dual-channel-dust-sensor-datasheet/download?Itemid=8488 (accessed on 21 November 2020).
- Telaire. SM-UART-01L+ Laser Dust Sensor PM2.5. Available online: https://amphenol-sensors.com/en/component/edocman/429-telaire-sm-uart-01l-laser-dust-sensor-datasheet/download?Itemid=8248%20%27 (accessed on 21 November 2020).
- Amphenol SM UART 04l Sensor Specification. Available online: https://amphenol-sensors.com/en/component/edocman/514-telaire-sm-uart-04l-laser-dust-sensor-application-note/download?Itemid=8488%20%27 (accessed on 21 November 2020).
- HK-A5 Laser PM2.5/10 Sensor. Available online: https://github.com/Arduinolibrary/DFRobot_PM2.5_Sensor_module/raw/master/HK-A5%20Laser%20PM2.5%20Sensor%20V1.0.pdf (accessed on 21 November 2020).
- Cubic. Dust Sensor PM2008M-M. Available online: http://en.gassensor.com.cn/ParticulateMatterSensor/indoor/19/7/195/ (accessed on 1 October 2019).
- Cubic. Laser Particle Sensor PM2107. Available online: http://en.gassensor.com.cn/ParticulateMatterSensor/indoor/19/7/193/ (accessed on 1 October 2019).
- Cubic. Laser Particle Sensor PM2105M. Available online: http://en.gassensor.com.cn/ParticulateMatterSensor/indoor/19/7/192/ (accessed on 1 October 2019).
- Cubic. Laser Particle Sensor PM2012. Available online: http://en.gassensor.com.cn/ParticulateMatterSensor/indoor/19/7/198/ (accessed on 1 October 2019).
- Cubic PM3015. Available online: https://drive.google.com/file/d/1fp7BszNmv6NWFFmpkmHPxV8PQcIRfQK8/view (accessed on 1 October 2019).
- Cubic. Dust Sensor PM3006T. Available online: http://en.gassensor.com.cn/uploadfiles/2020/07/20200702111723790.pdf (accessed on 1 October 2019).
- Cubic. Particle Counter PM5000. Available online: http://en.gassensor.com.cn/ParticulateMatterSensor/indoor/19/7/202/ (accessed on 1 October 2019).
- Seeed The Lot Hardware Unabler. Grove—Laser PM2.5 Sensor (HM3301). Available online: https://wiki.seeedstudio.com/Grove-Laser_PM2.5_Sensor-HM3301/ (accessed on 21 November 2020).
- Nanosense.PM2036 Sensor Specification. Available online: http://nano-sense.com/wp-content/uploads/2018/09/PM2036NS-Datasheet-NanoSense-V4.2-20171006.pdf (accessed on 21 November 2020).
- Nova Fitness SDS018 Sensor Specification. Available online: https://www-sd-nf.oss-cn-beijing.aliyuncs.com/%E5%AE%98%E7%BD%91%E4%B8%8B%E8%BD%BD/SDS018%20Laser%20PM2.5%20Product%20Spec%20V1.5.pdf (accessed on 21 November 2020).
- Panasonic.laser type PM Sensor. Available online: https://industrial.panasonic.com/ww/products/sensors/built-in-sensors/dust-sensor/pm_laser (accessed on 21 November 2020).
- Sharp DN7C3CA007 Sensor Specification. Available online: https://www.sharpsde.com/products/optoelectronic-components/model/DN7C3CA007/ (accessed on 1 October 2019).
- Isweek TF-LP01 Sensor Specification. Available online: https://www.isweek.com/Uploads/20180604/5b14bb38b82aa.pdf (accessed on 21 November 2020).
- Winsen ZH06 Sensor Specification. Available online: https://www.winsen-sensor.com/sensors/dust-sensor/245.html (accessed on 21 November 2020).
- Yaguchi Electric Pocket PM2.5 Sensor Specification. Available online: https://cdn.sparkfun.com/assets/parts/1/2/2/7/5/Pocket_PM2.5_sensor_spec.pdf (accessed on 21 November 2020).
- Amphenol Telair Sensor Specification. Available online: https://www.amphenol-sensors.com/en/component/edocman/559-telaire-dsf-series-automotive-pm2-5-in-cabin-sensor-product-datasheet/download?Itemid=8488 (accessed on 21 November 2020).
- Elitech PM900M Sensor Specification. Available online: https://www.elitecheu.com/collections/temtop-euparticle-counter/products/temtop-pm-900m-laser-particle-sensor-for-particulate-matter-pm1-0-pm2-5-pm10 (accessed on 21 November 2020).
- Han, I.; Symanski, E.; Stock, T.H. Feasibility of using low-cost portable particle monitors for measurement of fine and coarse particulate matter in urban ambient air. J. Air Waste Manag. Assoc. 2017, 67, 330–340. [Google Scholar] [CrossRef] [Green Version]
- Jayaratne, R.; Liu, X.; Ahn, K.H.; Asumadu-Sakyi, A.; Fisher, G.; Gao, J.; Mabon, A.; Mazaheri, M.; Mullins, B.; Nyaku, M.; et al. Low-cost PM2.5 Sensors: An Assessment of their Suitability for Various Applications. Aerosol Air Q. Res. 2020, 20, 520–532. [Google Scholar] [CrossRef]
















| Indoor | Outdoor |
|---|---|
| Concentration range up to thousands of μg/m3 | Concentration range of 500 μg/m3 |
|
|
| Averaging Time | EU a | U.S. b | China c | Hong Kong d | Japan e | Taiwan f | Australia g | WHO Guideline Values h | |
|---|---|---|---|---|---|---|---|---|---|
| PM10 μg/m3 | 24 h | 50 | 150 | 150 | 100 | 100 | 125 | 50 | 50 |
| Annual | 40 | - | 70 | 50 | - | 65 | 25 | 20 | |
| PM2.5 μg/m3 | 24 h | - | 35 | 75 | 75 | 35 | 35 | 25 | 25 |
| Annual | 25 | 12 | 35 | 35 | 15 | 15 | 8 | 10 |
| Source | PM Size | |||
|---|---|---|---|---|
| Beech burning | PM10 | TSP | ||
| Hard wood burning | PM10 | TSP | ||
| Larch burning | PM10 | TSP | ||
| Leaves burning | PM10 | TSP | ||
| Biomass burning | Oak burning | PM10 | ||
| Olive oil burning | PM10 | PM2.5 | ||
| Pellet burning | PM10 | TSP | ||
| Natural gas burning | PM10 | TSP | PM2.5 | |
| Wood burning | PM10 | TSP | PM2.5 | |
| Coal burning | PM10 | TSP | PM2.5 | |
| Fossil fuels | Coke burning | PM10 | TSP | PM2.5 |
| Boiler | PM10 | TSP | PM2.5 | |
| Refineries | PM10 | |||
| Ammonium nitrate | PM10 | PM2.5 | ||
| Ammonium sulfate | PM10 | PM2.5 | ||
| Iron and steel prod. | PM10 | TSP | PM2.5 | |
| Industrial | Metal smelting | PM10 | PM2.5 | |
| Fertilizer prod. | PM10 | PM2.5 | ||
| Cement | PM10 | TSP | PM2.5 | |
| Ceramic | PM10 | PM2.5 | ||
| Foundries | PM10 | PM2.5 | ||
| Natural dust | Marine aerosol | PM10 | PM2.5 | |
| Volcanic dust | PM10 | PM50 | ||
| Brake dust | PM10 | TSP | PM2.5 | |
| Deicing salt | PM10 | |||
| Diesel | PM10 | |||
| Road dust | Exhaust | PM10 | PM2.5 | |
| Fuel oil burning | PM10 | TSP | PM2.5 | |
| Gasoline exhaust | PM10 | |||
| Road dust | PM10 | TSP | PM2.5 | |
| Traffic | PM10 | SP | PM2.5 | |
| Petrochemical | PM10 | PM2.5 | ||
| Power plant | PM10 | TSP | PM2.5 |
| Manufacturer | Number of Sensor Models | References in This Review | Manufacturer | Number of Sensor Models | References in This Review | Manufacturer | Number of Sensor Models | References in this Review |
|---|---|---|---|---|---|---|---|---|
| Alphasense | 3 | 12 | Honeywell | 3 | 3 | Sharp | 2 | 10 |
| Amphenol Advanced Sensors | 6 | NA | NanoSense | 1 | NA | Shinyei | 5 | 3 |
| Bjhike | 1 | NA | Inovafitness | 2 | 3 | Tianjin Figaro-isweek | 1 | NA |
| Cubic Sensor and Instrument Co, Ltd. | 11 | NA | Panasonic | 2 | NA | Winsen | 3 | 2 |
| EcologicSense | 1 | NA | Plantower | 3 | 9 | Yaguchi Electr. Corp. | 1 | NA |
| Elitech | 1 | NA | Samyoung S&C | 2 | 1 | |||
| Grove Studio | 1 | NA | Sensirion | 1 | 1 |
| Manufacturer/Model/Ref | Dimension (mm) and Weight(g) | Power Supply (V) | Working Current (mA) | Sleep Current (mA)/Low Power Operating Modalities | Laser Power Regulation | Response/Warm up Time (s) | Output Interface s/Level | Flux Type/Inlet-Outlet Position | Lifetime/Ageing Phenomena | Approximate Cost Range |
|---|---|---|---|---|---|---|---|---|---|---|
| Alphasense/OPC/N2/ [81,82,93,94,97,98,114,126,127,129] | 64 × 75 × 60 /105 | 4.8–5.2 | 175 | 95 mA/laser at minimum power; fan off | Yes | 1.4/10 | SPI/- | FAN/opposite sides | NA | High |
| Honeywell/HPMA115S0- XXX/ [67,122,129,130] | 43 × 3600 × 23.7/- | 5 | 80 | 20 mA | No | 6/- | UART/- | FAN | 10y | Mid |
| Inovafitness/SDS011/ [57,67,82,113] | 71 × 70 × 23/100 | 4.7–5.3 | 70 | 4 mA/laser and fan sleep/low power operating mode | Laser sleep | 1/10 | UART, PWM/3.3V | FAN/opposite side | Service life is up to 8000 h | Mid |
| Plantower/PMS 1003/ [80,131] | 65 × 42 × 23/- | 5–5.5 | 100 | <1 mA/adaptative acquisition frequency | No | 1–10/- | UART/3.3V | FAN/opposite side | MTTF ≥ 3 Year | Mid |
| Plantower/PMS 7003/ [55,81,82,124,129] | 48 × 37 × 12/- | 5–5.5 | 100 | <1 mA/adaptative acquisition frequency | On/off | 1–10/- | UART/3.3V | FAN/same side | MTTF ≥ 3 Year | Mid |
| Plantower/PMS A003/ [76,125] | 35 × 38 × 12/- | 5–5.5 | 100 | <1 mA/adaptative acquisition frequency | No | 1–10/- | UART/3.3V | FAN/same side | MTTF ≥ 3 Year | Mid |
| Sensirion/SPS30/ [118,132] | 40.6 × 40.6 × 12.2/26 | 4.5–5.5 | 80 | <50 μA/Sleep-Mode–Idle-Mode | NA | 1/30 | UART, I2C/- | FAN | >10 y/maximum long-term number concentration precision limit drift 20 to 1000 #/cm3 ± 12.5 #/cm3/year 1000 to 3000 #/cm3 ± 1.25% m.v./year | High |
| Sharp/GP2Y1010AU0F/ [63,65,67,83,134,135,136] | 46 × 30 × 17.6/16 | 5 | 40 | No | EXT | 0.001/- | Analog/- | No/opposite side | Laser diode: 50% degradation/5 years | Low |
| Shinyei/PMS1/ [98,137] | 71.4 × 76.4 × 36.7/130 | 12 | 380 | NA | NA | NA | Ethernet/- | Heater | NA | NA |
| Shinyei/PPD20V/ [138,139] | 88 × 60 × 20/38 | 5 | 160 | NA | No | -/60 | PWM/- | Heater | 7y | NA |
| Shinyei/PPD42NJ/ [63,138,140] | 59 × 45 × 22/24 | 5 | 90 | NA | No | -/60 | PWM/- | Auto suction by a built-in heater resistor | 7y | NA |
| Shinyei/PPD60PV-T2/ [138,141] | 88 × 60 × 22/- | 5 | 140 | NA | No | -/60 | PWM/- | Heater | 3y | NA |
| Winsen/ZH03/ZH03A/ZH03B/ [67,82,142] | 50 × 32.4 × 21/- | 5 | 120 | <10 mA | NA | -/45 | PWM/- | FAN/opposite site | 3y in the air | Mid |
| Sensors | Output Flexibility | Integration Complexity | IoT | Applications that Require Advanced Metrological Properties |
|---|---|---|---|---|
| Alphasense OPC/N2 [114] | ● | ● | ● | |
| Alphasense OPC/N3 [116] | ● | ● | ● | |
| Alphasense OPC/R1 [115] | ● | ● | ||
| Amphenol Telaire SM-PWM-01C [144] | ||||
| Amphenol Telaire SM-PWM-01S [145] | ● | |||
| Amphenol Telaire SM-UART-01D [151] | ● | |||
| Amphenol Telaire SM-UART-01L+ [152] | ● | |||
| Amphenol Telaire SM-UART-04L [153] | ● | ● | ||
| Amphenol Telaire Telaire DSF Series [170] | ● | ● | ||
| bjhike HK-A5 [154] | ● | |||
| Cubic Sensor and Instrument Co,Ltd PM1003 [146] | ● | |||
| Cubic Sensor and Instrument Co,Ltd PM1006K [143] | ● | |||
| Cubic Sensor and Instrument Co,Ltd PM2008 [119] | ● | ● | ● | |
| Cubic Sensor and Instrument Co,Ltd PM2008M [155] | ● | ● | ● | |
| Cubic Sensor and Instrument Co,Ltd PM2009 [120] | ● | ● | ● | |
| Cubic Sensor and Instrument Co,Ltd PM2012 [158] | ● | ● | ● | ● |
| Cubic Sensor and Instrument Co,Ltd PM2105M [157] | ● | ● | ● | |
| Cubic Sensor and Instrument Co,Ltd PM2107 [156] | ● | ● | ● | |
| Cubic Sensor and Instrument Co,Ltd PM3006T [160] | ● | ● | ||
| Cubic Sensor and Instrument Co,Ltd PM3015 [159] | ● | ● | ||
| Cubic Sensor and Instrument Co,Ltd PM5000 [161] | ● | |||
| EcologicSense NEXT-PM [117] | ● | ● | ||
| Elitech PM-900M [171] | ● | |||
| Grove Studio Laser PM2.5 Sensor (HM3301) [162] | ● | ● | ||
| Honeywell HPMA115C0-003 [122] | ● | ● | ● | |
| Honeywell HPMA115C0-004 [122] | ● | ● | ||
| Honeywell HPMA115S0-XXX [122] | ● | ● | ||
| NanoSense PM2036 [163] | ● | ● | ● | |
| Inovafitness SDS011 [113] | ● | ● | ||
| Inovafitness SDS018 [164] | ● | ● | ● | |
| Panasonic LED Type PM2.5 Sensor [147] | ● | |||
| Panasonic SN-GCJA5 Laser Type PM Sensor [165] | ● | |||
| Plantower PMS 1003 [131] | ● | ● | ● | |
| Plantower PMS 7003 [124] | ● | ● | ● | |
| Plantower PMS A003 [125] | ● | ● | ● | |
| SAMYOUNG S&C PSML [148] | ||||
| SAMYOUNG S&C PSMU [148] | ||||
| Sensirion SPS30 [118] | ● | ● | ● | ● |
| Sharp GP2Y1010AU0F [136] | ||||
| Sharp DN7C3CA007 [166] | ||||
| Shinyei PM sensor [137] | ● | |||
| Shinyei PPD20V [139] | ||||
| Shinyei PPD42NJ [140] | ||||
| Shinyei PPD60PV-T2 [141] | ||||
| Shinyei PPD71 [149] | ||||
| tianjinFigaro-isweek TF-LP01 [167] | ● | |||
| Winsen ZPH01 [150] | ||||
| Winsen ZH03/ZH03A/ZH03B [142] | ● | ● | ||
| Winsen ZH06-I [168] | ● | ● | ||
| YaguchiElectric Corp. SDS021 [169] | ● | ● |
| Ref | Test Year | PM Class | Accuracy | Completeness | Detection Limit | Measurement Range | Precision | Reference Instrument | ||
|---|---|---|---|---|---|---|---|---|---|---|
| R2 | Bias μg/m3 | μg/m3 | μg/m3 | % | ||||||
| * Tested in a laboratory setup | ||||||||||
| Plantower PMS A003 | [76] | 2018 | 2.5 | 0.91 | 0–49 | 12 | PDR-1200 | |||
| Plantower PMS 1003 | [80] | 2019 | 10 | 0.91 | Gravimetric FRM | |||||
| Plantower PMS 5003 | [80] | 2019 | 10 | 0.7 | Gravimetric FRM | |||||
| Plantower PMS 1003 | [80] | 2019 | 2.5 | 0.88 | 56.9% | Gravimetric FRM | ||||
| Plantower PMS 5003 | [80] | 2019 | 2.5 | 0.89 | 11.6% | PartisolTM 2025i Sequential Air Sampler) | ||||
| Plantower PMS 7003 | [55] | 2019 | 2.5 | 0.96 | 16–75 | 16 | TEOM SEMC/GRIMM 1.108 | |||
| Plantower PMS 7003 | [55] | 2019 | 10 | 0.97 | 16–75 | 14 | TEOM SEMC/GRIMM 1.109 | |||
| Novasense SDS011 | [57] | 2018 | 2.5 | 0.96 | 3–79 | TSI DustTrak DRX | ||||
| Novasense SDS012 | [57] | 2018 | 10 | 0.91 | 3–90 | TSI DustTrak DRX | ||||
| Alphasense OPCN2 | [93] | 2018 | 2.5 | 0.9 | 0–300 | Grimm1.108 | ||||
| Alphasense OPCN2 | [93] | 2018 | 10 | 0.84 | 0–350 | Grimm1.108 | ||||
| Alphasense OPCN2 | [129] | 2019 | 2.5 | 0.50 | 0–35 | TEOM AURN | ||||
| Honeywell HPMA115S0 | [129] | 2019 | 2.5 | 0.77 | 0–35 | TEOM AURN | ||||
| Plantower PMS 5003 | [129] | 2019 | 2.5 | 0.76 | 0–35 | TEOM AURN | ||||
| Plantower PMS 7003 | [129] | 2019 | 2.5 | 0.73 | 0–35 | TEOM AURN | ||||
| ZH03A (Winsen) | [82] | 2018 | 2.5 | 0.81 | 3.27 | 0–120 | 25 | TEOM 1400a | ||
| Alphasense OPCN2 | [82] | 2018 | 2.5 | 0.61 | 8.36 | 0–120 | 37 | TEOM 1400a | ||
| Plantower PMS 7003 | [82] | 2018 | 2.5 | 0.89 | 3.36 | 0–120 | 11 | TEOM 1400a | ||
| Novasense SDS011 | [82] | 2018 | 2.5 | 0.9 | 4.76 | 0–120 | 12 | TEOM 1400a | ||
| Alphasense OPCN2 | [98] | 2018 | 2.5 | 0.2 | 82.00% | grimm edm 180 | ||||
| Alphasense OPCN2 | [98] | 2018 | 10 | 0.46 | 82.00% | grimm edm 18 | ||||
| Shinyei PMS-SYS-1 | [98] | 2018 | 2.5 | 0.52 | 92.00% | grimm edm 180 | ||||
| Alphasense OPCN2 | [126] | 2017 | 10 | 0.81 | 0.32 | 0–250 | Bam 1020 | |||
| Alphasense OPCN2 | [126] | 2017 | 10 | 0.84 | 2.83 | grimm11R | ||||
| Alphasense OPCN2 | [126] | 2017 | 2.5 | 0.43 | 1.92 | grimm11R | ||||
| Alphasense OPCN2 | [81] | 2019 | 2.5 | 0.45 | 0–100 | TEOM AURN | ||||
| Plantower PMS 5003 | [81] | 2019 | 2.5 | 0.7 | 0–100 | TEOM AURN | ||||
| Plantower PMS 7003 | [81] | 2019 | 2.5 | 0.77 | 0–100 | TEOM AURN | ||||
| Alphasense OPCN2 | [97] | 2019 | 2.5 | 0.81 | 0–146 | teom | ||||
| Honeywell HPMA115S0 | [130] | 2019 | 2.5 | 0.58 | 0–72.9 | grimm edm 180 | ||||
| Honeywell HPMA115S0 | [67] | 2019 | 2.5 | 0.99 | TSI-3025A | |||||
| Novasense SDS011 | [67] | 2019 | 2.5 | 0.90 * | TSI-3025A | |||||
| ZH03A (Winsen) | [67] | 2019 | 2.5 | 0.98 | TSI-3025A | |||||
| sharp GP2y | [67] | 2019 | 2.5 | 0.96 | TSI-3025A | |||||
| Alphasense OPCN2 | [94] | 2018 | 2.5 | 0.78 | 0–70 | Palas Fidas 200 | ||||
| PPD42NS | [138] | 2018 | 2.5 | 0.8 | 9.1 | 0–500 | TSI DustTrak | |||
| PPD20V | [138] | 2018 | 2.5 | 0.98 | 4.6 | 0–500 | TSI DustTrak | |||
| PPD60PV | [138] | 2018 | 2.5 | 0.87 | 29 | 0–500 | TSI DustTrak | |||
| sharp GPD2y1010AU0F | [134] | 2018 | 2.5 | 0.99 | 0–8000 | TSI AM510 ‘Sidepak’ | ||||
| sharp GPD2y1010AU0F | [135] | 2017 | 2.5 | 0.99 * | 10.93 | 0–1000 | Alphasense OPC-N2 | |||
| sharp GPD2y1010AU0F | [63] | 2015 | 2.5 | 0.99 * | 26.9 | 0–5000 | TSI AM510 ‘Sidepak’ | |||
| Shinyei PPD42NS, | [63] | 2015 | 2.5 | 0.95 | 6.44 | 0–300 | TSI SidePak | |||
| Samyoung DSM501A | [63] | 2015 | 2.5 | 0.98 | 11.4 | 0–300 | TSI SidePak | |||
| sharp GPD2y1010AU0 | [136] | 2012 | 10 | 0.99 | 0–3000 | TSI AM510 ‘Sidepak’ | ||||
| sharp GPD2y1010AU0F | [83] | 2015 | 2.5 | 0.98 * | 0–140 | Dusttrak 8520 | ||||
| sharp GPD2y1010AU0F | [83] | 2015 | 10 | 0.91 * | 0–120 | Dusttrak 8520 | ||||
| sharp GPD2y1010AU0F | [65] | 2016 | 2.5 | 0.95 | 30–6300 | <6% | SMPS/CPC(GRIMM)-APS 3321 | |||
| Sensirion SPS30 | [132] | 2019 | 2.5 | 0.83 * | ? | ?% | Grimm1.108 | |||
| Alphasense OPC-N2 | [127] | 2016 | 2.5 | 0.99 * | 10–10,000 | 4.2–16% | SMPS/CPC(GRIMM)-APS 3321 | |||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alfano, B.; Barretta, L.; Del Giudice, A.; De Vito, S.; Di Francia, G.; Esposito, E.; Formisano, F.; Massera, E.; Miglietta, M.L.; Polichetti, T. A Review of Low-Cost Particulate Matter Sensors from the Developers’ Perspectives. Sensors 2020, 20, 6819. https://doi.org/10.3390/s20236819
Alfano B, Barretta L, Del Giudice A, De Vito S, Di Francia G, Esposito E, Formisano F, Massera E, Miglietta ML, Polichetti T. A Review of Low-Cost Particulate Matter Sensors from the Developers’ Perspectives. Sensors. 2020; 20(23):6819. https://doi.org/10.3390/s20236819
Chicago/Turabian StyleAlfano, Brigida, Luigi Barretta, Antonio Del Giudice, Saverio De Vito, Girolamo Di Francia, Elena Esposito, Fabrizio Formisano, Ettore Massera, Maria Lucia Miglietta, and Tiziana Polichetti. 2020. "A Review of Low-Cost Particulate Matter Sensors from the Developers’ Perspectives" Sensors 20, no. 23: 6819. https://doi.org/10.3390/s20236819