
Single Commercially Available IC-Based Electronically Controllable Voltage-Mode First-Order Multifunction Filter with Complete Standard Functions and Low Output Impedance

 ,
,  , ,
, ,
Abstract
:1. Introduction
- Most of the proposed universal first-order filters are emphasized for the on-chip realization of both CMOS [21,22,23,24,25,26,27,28,29,30,31,32,34,35,36,40,41,45] or BJT [33,37,39] technology. As stated above, the implementation of an on-chip circuit is quite costly. Although the CMOS-based filters in [21,30,31,32,45] can be realized using the commercially available ICs, they require a lot of ICs. The commercial IC based first-order filters are reported in [38,42,43,44]. However, the filters in [38,42,44] used five, three, and two commercially available ICs, respectively. Additionally, the filter in [42] requires four passive resistors and that in [43] uses six passive resistors.
- The realization of a current-mode circuit is a compact structure and can avoid the use of additional summing or subtracting circuits at the output node. However, the current-mode universal filters in [21,23] (Figure 2) [24,26,29,30,31,34,35,36,37,38,39,41] use the active building block, which has multiple output current terminals. These filters will provide high performances when they are implemented into an integrated circuit, which is quite costly.
- Most of the universal first-order filters shown in Table 1 can provide three responses: low-pass, high-pass, and all-pass functions (except in [22], which gives only two filtering responses). However, the lagging and leading phase responses of the all-pass filters in [21,22,23,24,25,26,27,28,29,30,31,33,36,38,40,41,42,43] are not given in the same circuit structure.
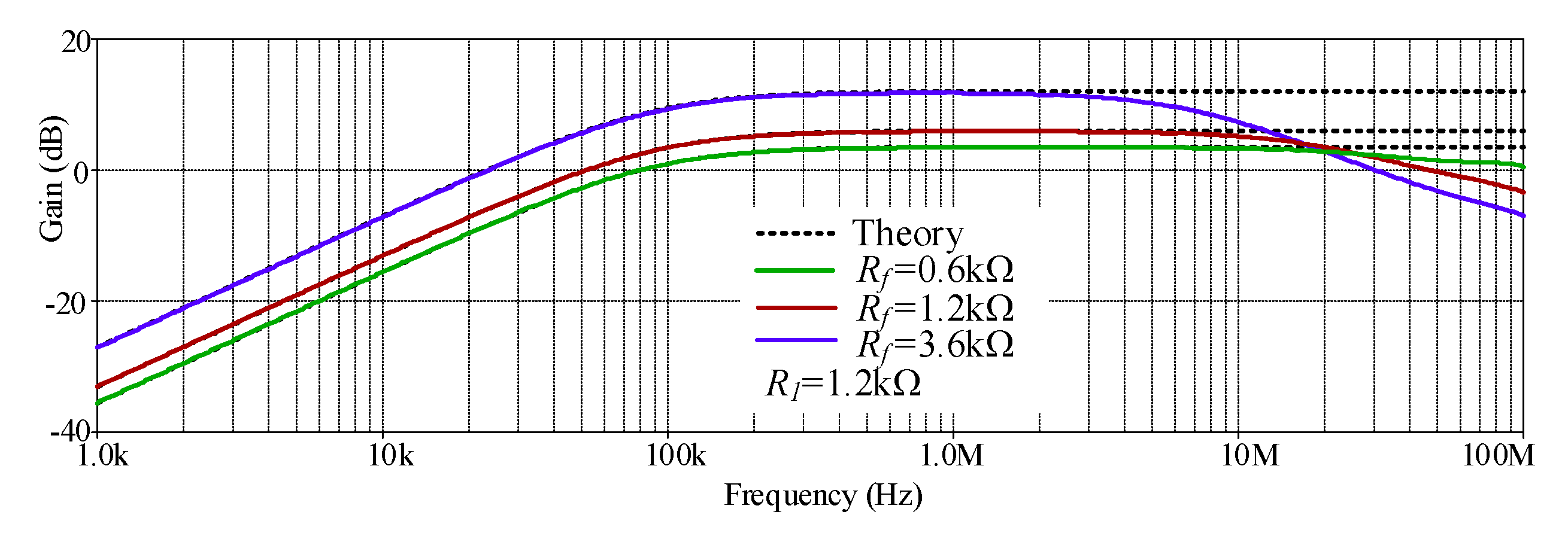
- In practice, if the input signal magnitude of the filter is low, the pass-band gain of the filters should be tunable. Therefore, the gain controllable active filter is needed to avoid using an additional amplifier. However, the pass-band gain of the filters in [21,23,24,26,29,30,31] (Figure 1) [32,34,35,36,38,39,40,41] are not controllable.
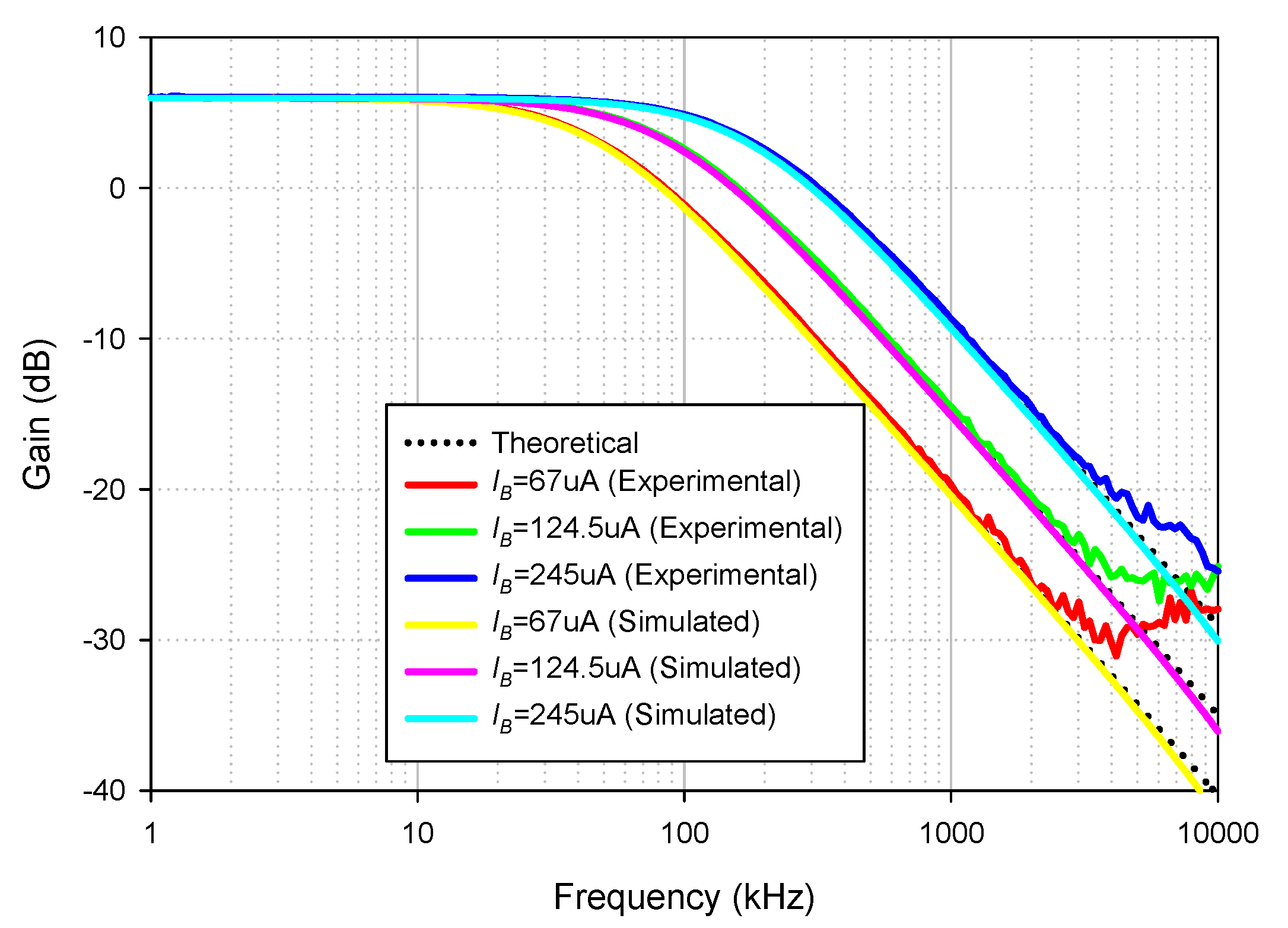
- The pole frequency and phase shift angle of the filters in [23,25,29,32,34,40,41,42] are not electronically controlled. Although the filters in [21,24,35] are electronically controllable, the passive resistor was replaced by the MOS transistor to achieve electronic controllability, which provides a narrow tuning range.
- To avoid the use of additional buffer devices at the output node of the filter, the voltage output node should be low impedance and the current output node should be high impedance.
2. Principle of Operation
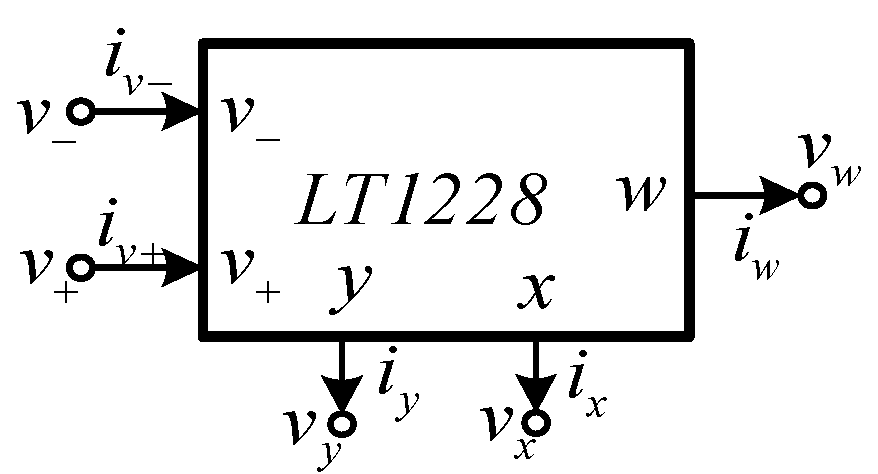
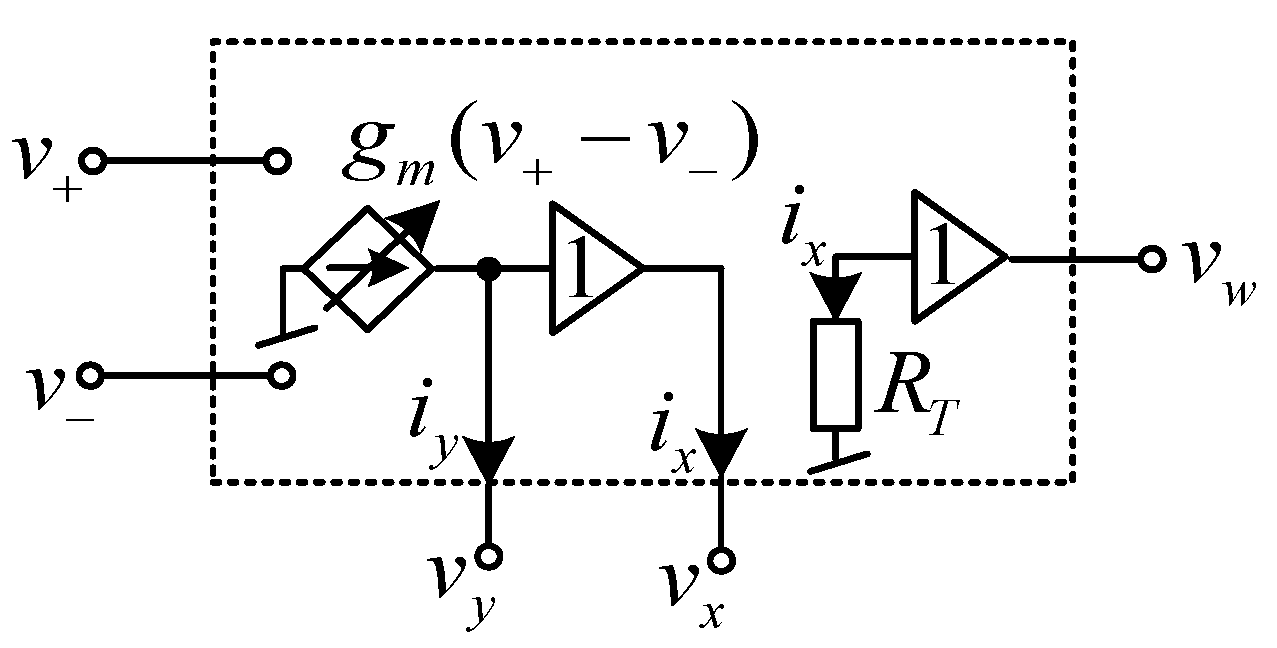
2.1. Overview of LT1228
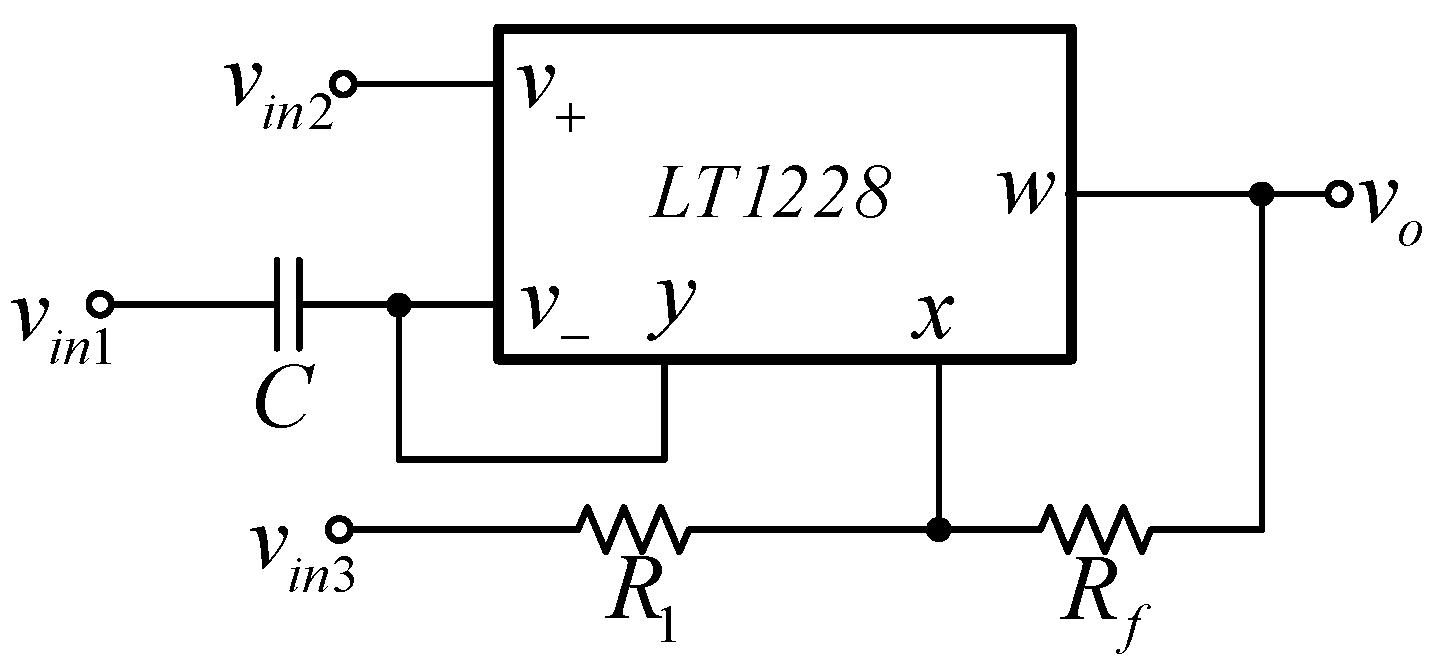
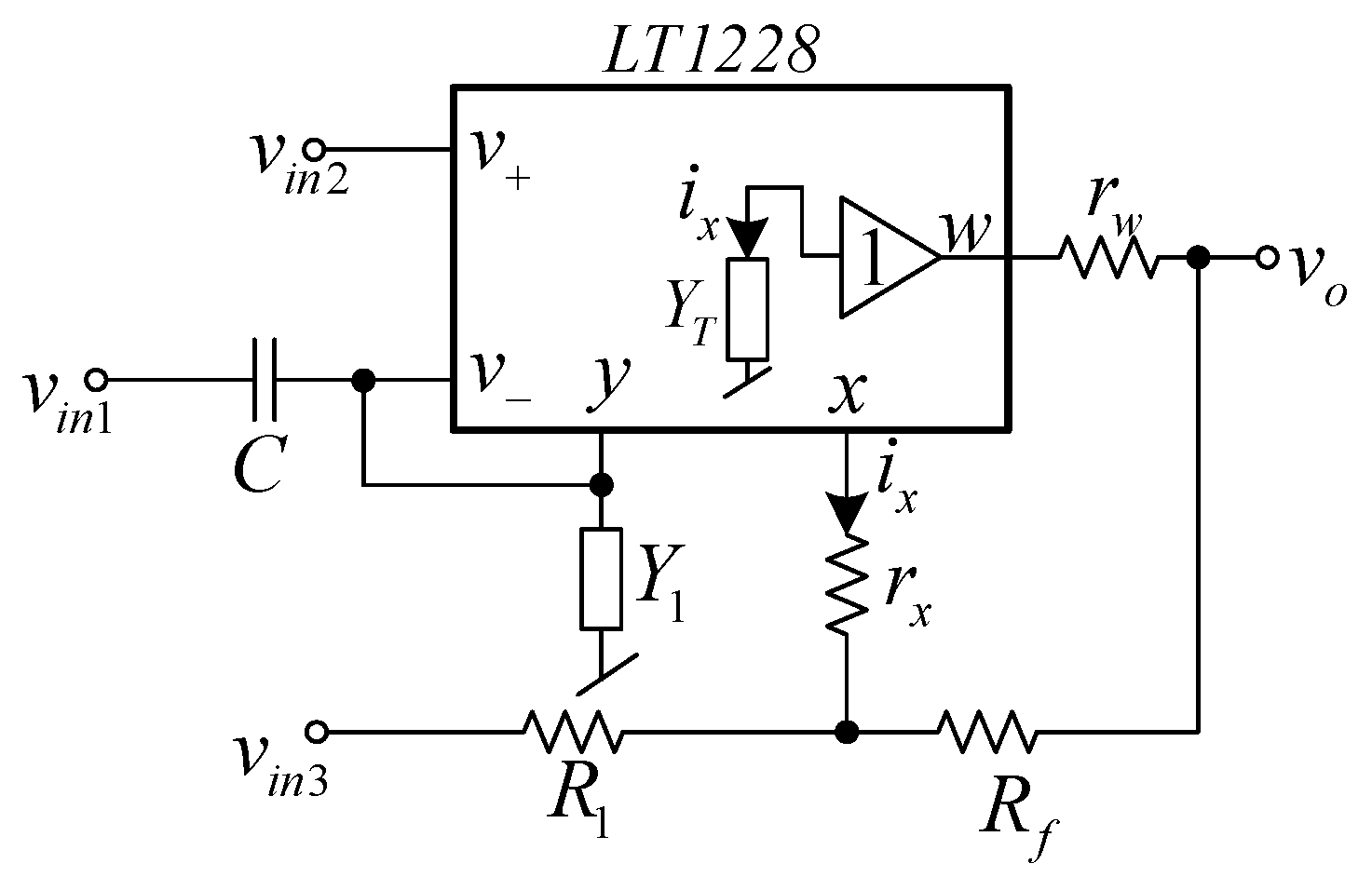
2.2. Proposed First Order Multifunction Filter Using Single LT1228
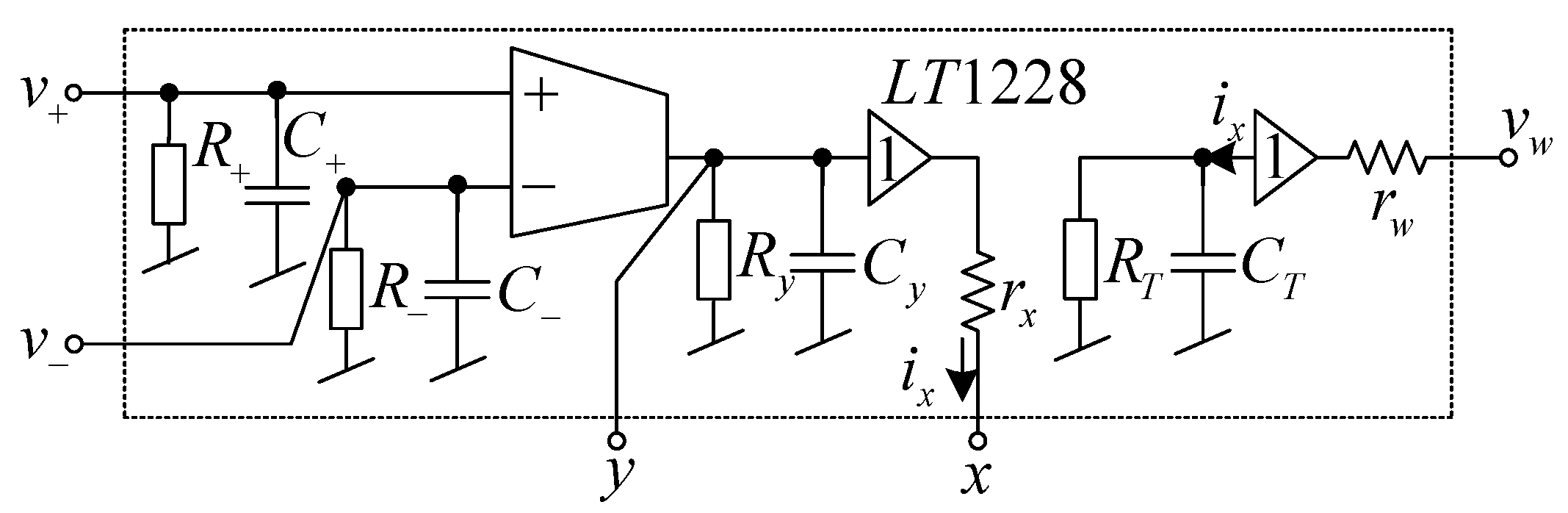
2.3. Study of Parasitic Effects
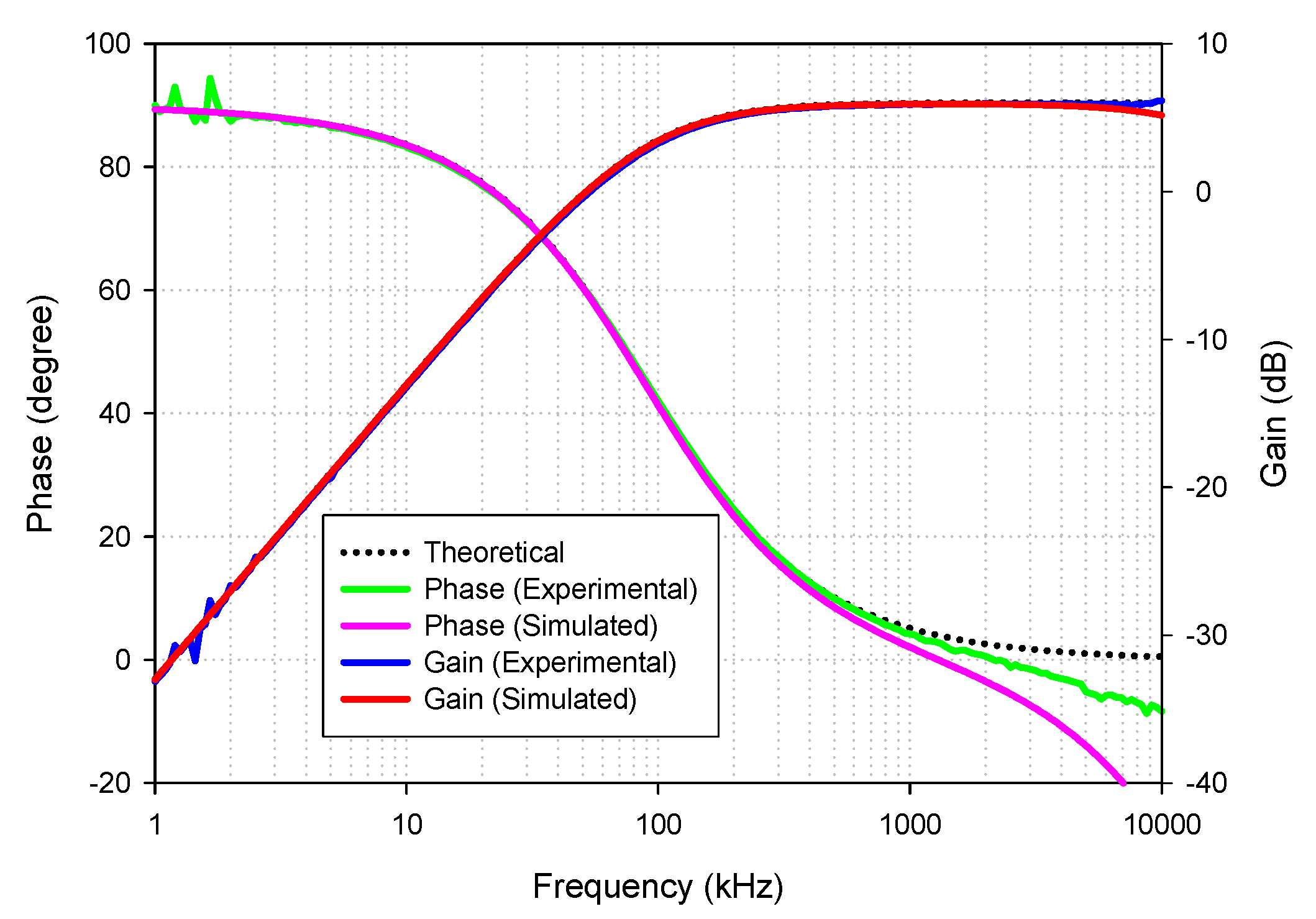
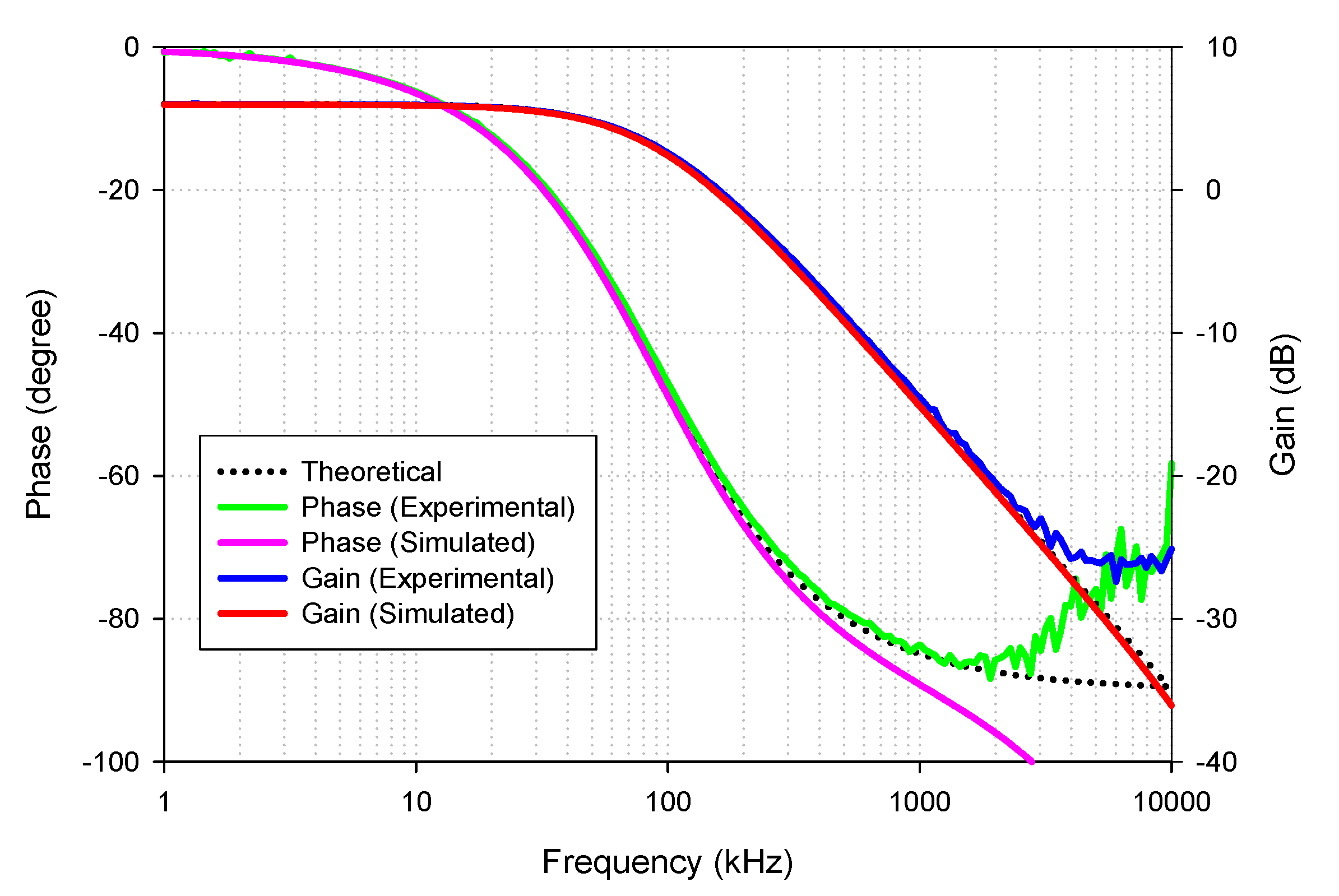
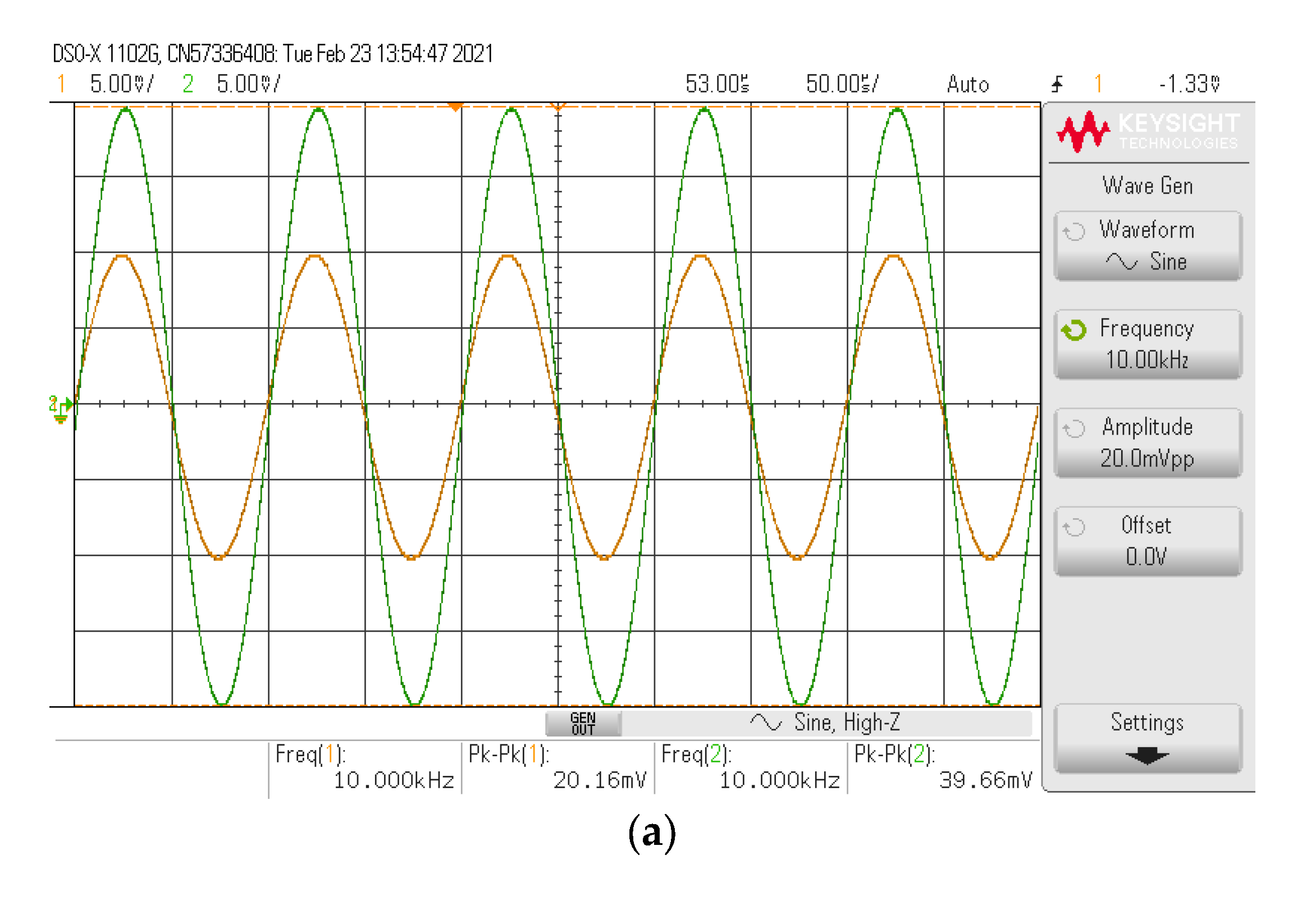
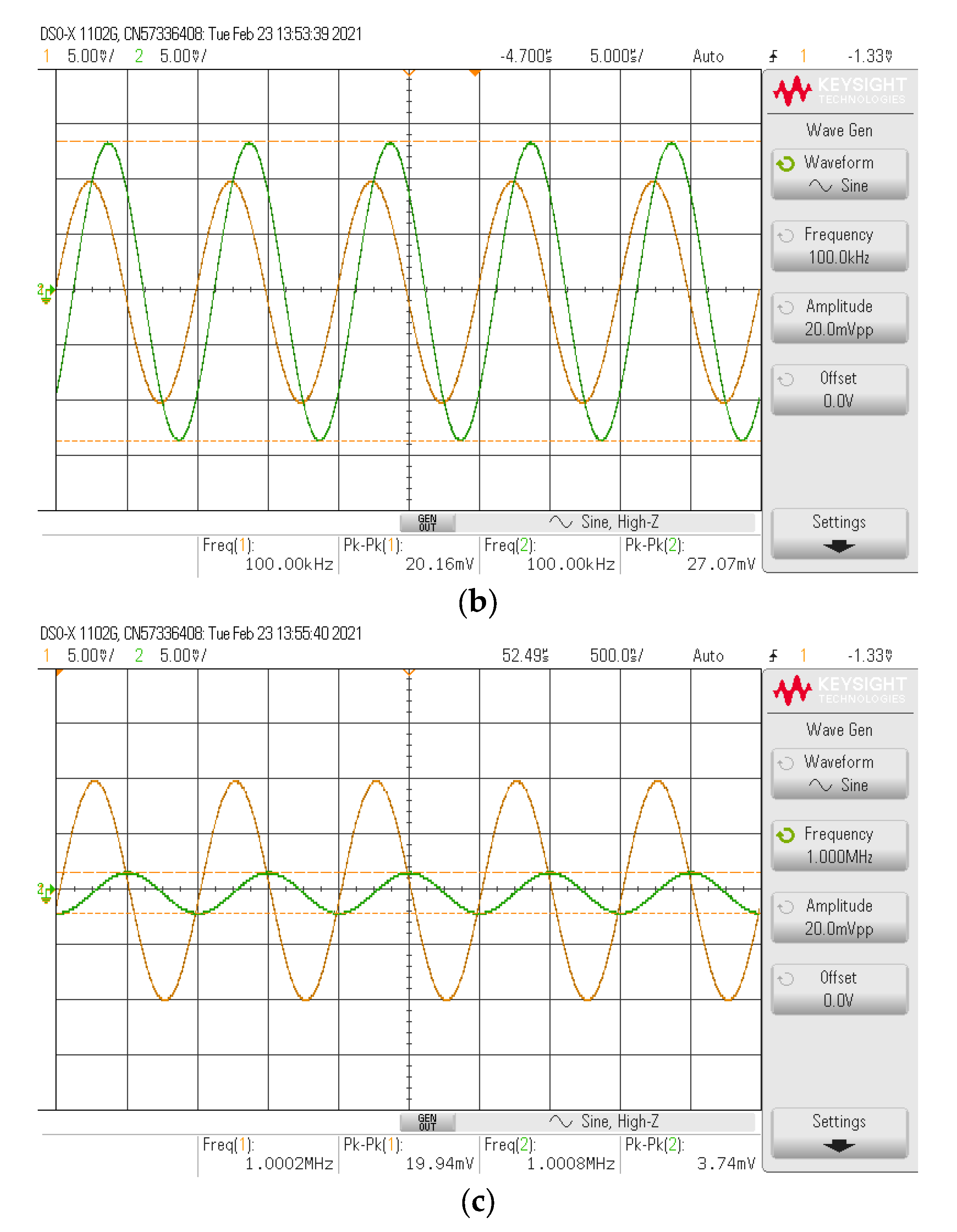
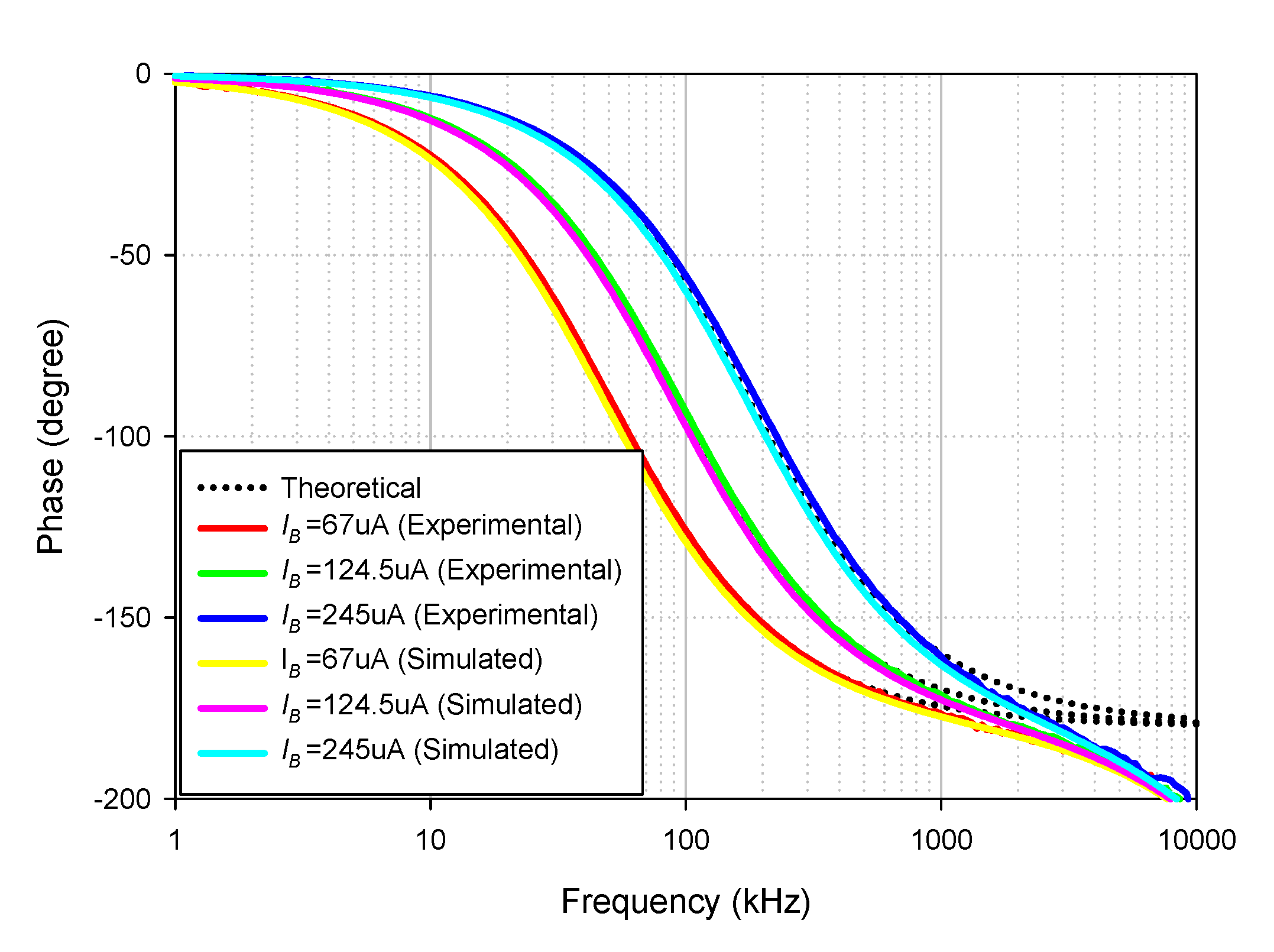
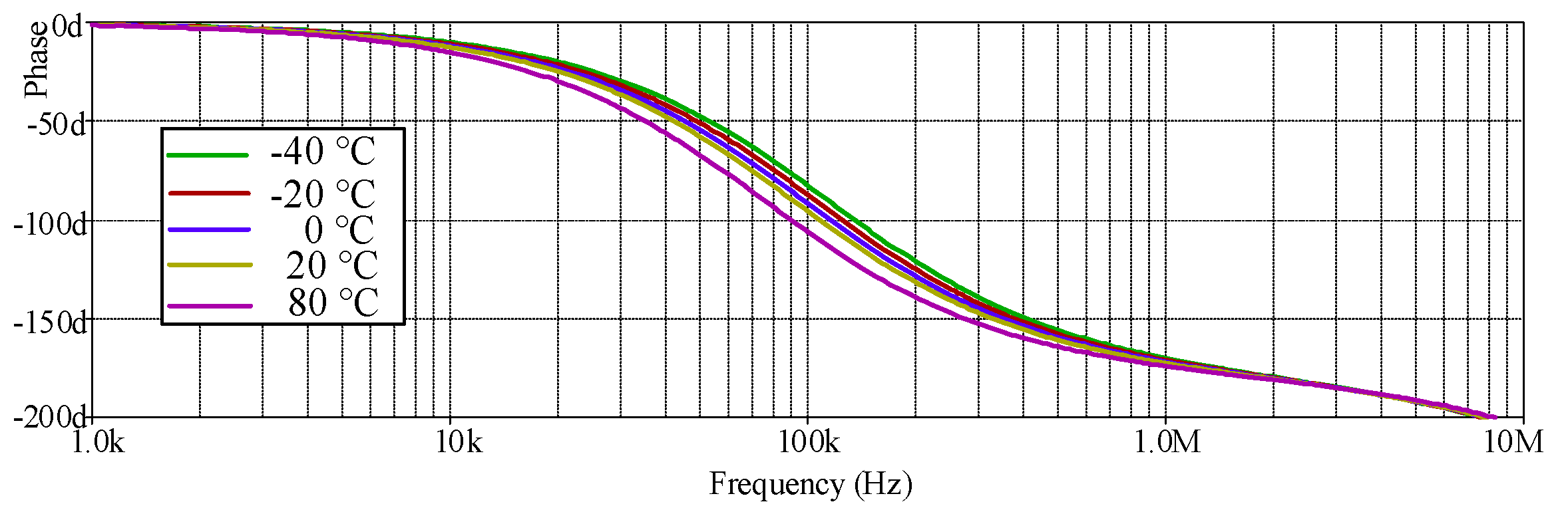
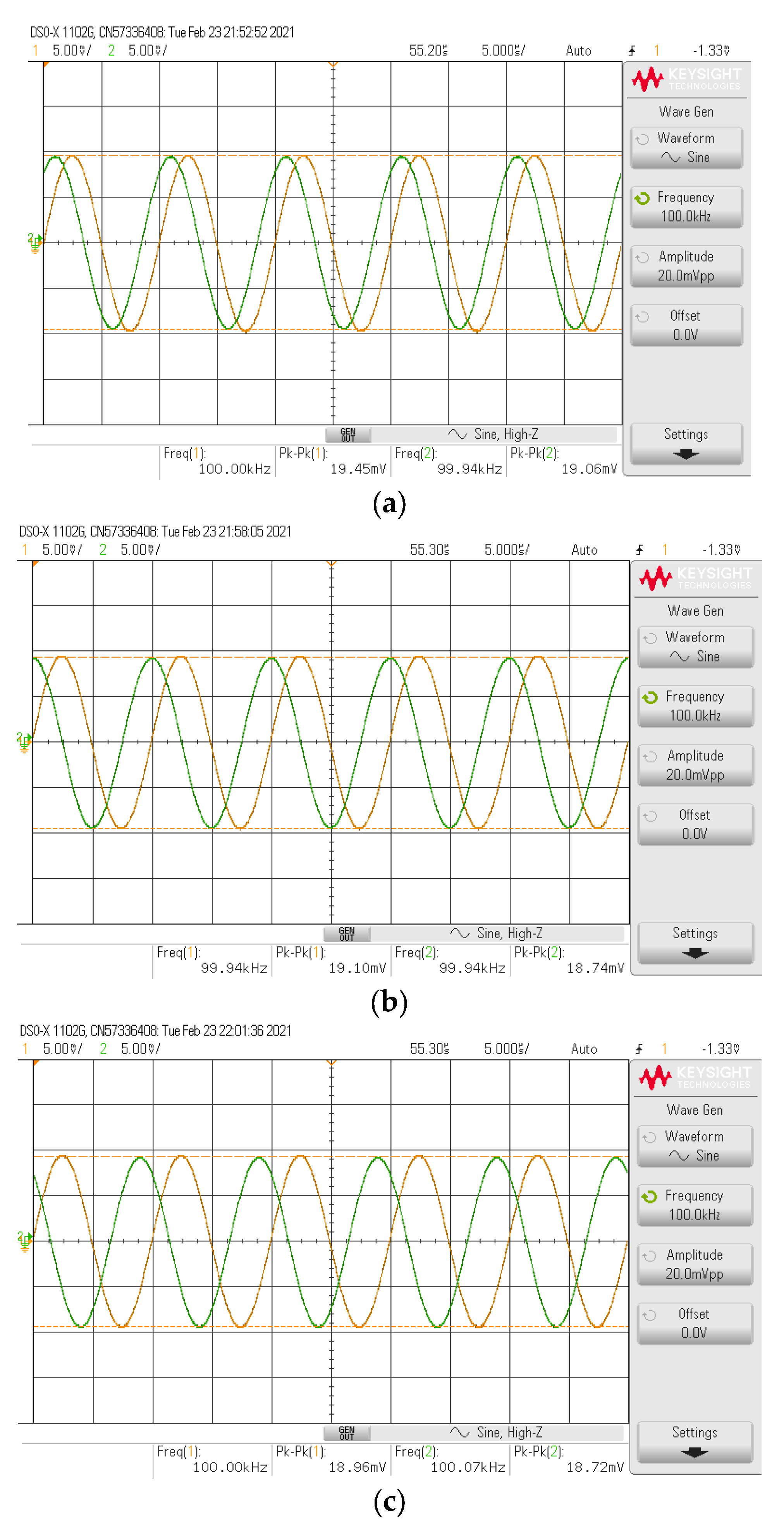
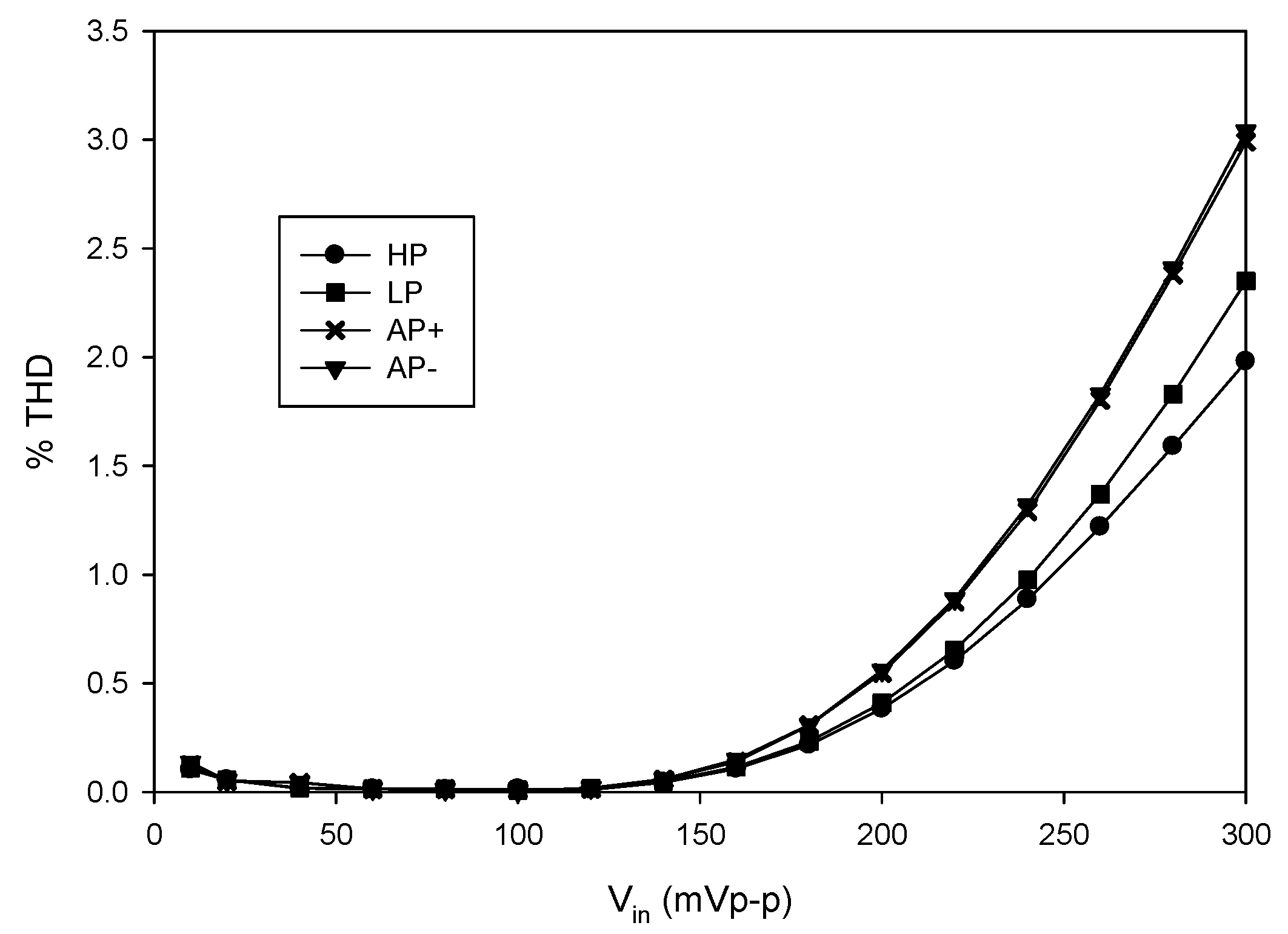
3. Simulation and Experimental Results
4. Quadrature Sinusoidal Oscillator Based on the Proposed AP− Filter
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Kumngern, M.; Aupithak, N.; Khateb, F.; Kulej, T. 0.5 V Fifth-Order Butterworth Low-Pass Filter Using Multiple-Input OTA for ECG Applications. Sensors 2020, 20, 7343. [Google Scholar] [CrossRef]
- Wang, S.F.; Chen, H.P.; Ku, Y.; Zhong, M.X. Voltage-mode multifunction biquad filter and its application as fully-uncoupled quadrature oscillator based on current-feedback operational amplifiers. Sensors 2020, 20, 6681. [Google Scholar]
- Prommee, P.; Wongprommoon, N.; Kumngern, M.; Jaikla, W. Low-voltage low-pass and band-pass elliptic filters based on log-domain approach suitable for biosensors. Sensors 2019, 19, 5581. [Google Scholar] [CrossRef] [Green Version]
- Myderrizi, I.; Minaei, M.; Yuce, E. An Electronically Fine-Tunable Multi-Input-Single-Output Universal Filter. IEEE Trans. Biomed. Circuits Syst. II Express Briefs 2011, 58, 356–360. [Google Scholar] [CrossRef]
- Jaikla, W.; Khateb, F.; Kulej, T.; Pitaksuttayaprot, K. Universal Filter Based on Compact CMOS Structure of VDDDA. Sensors 2021, 21, 1683. [Google Scholar] [CrossRef] [PubMed]
- Wang, S.-F.; Chen, H.-P.; Ku, Y.; Li, Y.-F. High-Input Impedance Voltage-Mode Multifunction Filter. Appl. Sci. 2021, 11, 387. [Google Scholar] [CrossRef]
- Yuce, E.; Tez, S. A Novel Voltage-Mode Universal Filter Composed of Two Terminal Active Devices. AEU Int. J. Electron. Commun. 2018, 86, 202–209. [Google Scholar] [CrossRef]
- Wang, S.-F.; Chen, H.-P.; Ku, Y.; Yang, C.-M. Independently tunable voltage-mode OTA-C biquadratic filter with five inputs and three outputs and its fully-uncoupled quadrature sinusoidal oscillator application. AEU Int. J. Electron. Commun. 2019, 110, 152822. [Google Scholar] [CrossRef]
- Faseehuddin, M.; Herencsar, N.; Albrni, M.A.; Sampe, J. Electronically Tunable Mixed-Mode Universal Filter Employing a Single Active Block and a Minimum Number of Passive Components. Appl. Sci. 2021, 11, 55. [Google Scholar] [CrossRef]
- Chen, H.P.; Yang, W.S. Electronically Tunable Current Controlled Current Conveyor Transconductance Amplifier-Based Mixed-Mode Biquadratic Filter with Resistorless and Grounded Capacitors. Appl. Sci. 2017, 7, 244. [Google Scholar] [CrossRef] [Green Version]
- Jaikla, W.; Adhan, S.; Suwanjan, P.; Kumngern, M. Current/voltage controlled quadrature sinusoidal oscillators for phase sensitive detection using commercially available IC. Sensors 2020, 20, 1319. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Maheshwari, S.; Ansari, M.S. Catalog of Realizations for DXCCII using Commercially Available ICs and Applications. Radioengineering 2012, 21, 281–289. [Google Scholar]
- Dogan, M.; Yuce, E. A new CFOA based grounded capacitance multiplier. AEU Int. J. Electron. Commun. 2020, 115, 153034. [Google Scholar] [CrossRef]
- Yuce, E.; Minaei, S. Commercially Available Active Device Based Grounded Inductor Simulator and Universal Filter with Improved Low Frequency Performances. J. Circuits Syst. Comput. 2017, 26, 1750052. [Google Scholar] [CrossRef]
- Senani, R.; Bhaskar, D.R.; Kumar, P. Two-CFOA-Grounded-Capacitor First-order All-pass Filter Configurations with Ideally Infinite Input Impedance. AEU Int. J. Electron. Commun. 2021, 137, 153742. [Google Scholar] [CrossRef]
- Herencsar, N.; Koton, J.; Hanak, P. Universal Voltage Conveyor and its Novel Dual-Output Fully-Cascadable VM APF Application. Appl. Sci. 2017, 7, 307. [Google Scholar] [CrossRef]
- Kartci, A.; Sotner, R.; Jerabek, J.; Herencsar, N.; Petrzela, J. Phase shift keying modulator design employing electronically controllable all-pass sections. Analog. Integr. Circuits Signal Process. 2016, 89, 781–800. [Google Scholar] [CrossRef]
- Chaichana, A.; Siripongdee, S.; Jaikla, W. In Electronically Adjustable Voltage-mode First-order Allpass Filter Using Single Commercially Available IC. In Proceedings of the 2nd International Conference on Smart Materials Applications (ICSMA), Tokyo, Japan, 19–22 January 2019. [Google Scholar]
- Yuce, E.; Verma, R.; Pandey, N.; Minaei, S. New CFOA-based first-order all-pass filters and their applications. AEU Int. J. Electron. Commun. 2019, 103, 57–63. [Google Scholar] [CrossRef]
- Jitender; Mohan, J.; Chaturvedi, B. All-Pass Frequency Selective Structures: Application for Analog Domain. J. Circuits Syst. Comput. 2021, 30, 2150150. [Google Scholar] [CrossRef]
- Yuce, E.; Minaei, S. A New First-Order Universal Filter Consisting of Two ICCII+s and a Grounded Capacitor. AEU Int. J. Electron. Commun. 2021, 137, 153802. [Google Scholar] [CrossRef]
- Barile, G.; Safari, L.; Pantoli, L.; Stornelli, V.; Ferri, G. Electronically Tunable First Order AP/LP and LP/HP Filter Topologies Using Electronically Controllable Second Generation Voltage Conveyor (CVCII). Electronics 2021, 10, 822. [Google Scholar] [CrossRef]
- Chaturvedi, B.; Mohan, J.; Kumar, A.; Pal, K. Current-Mode First-Order Universal Filter and its Voltage-Mode Transformation. J. Circuits Syst. Comput. 2020, 29, 2050149. [Google Scholar] [CrossRef]
- Chaturvedi, B.; Mohan, J.; Jitender; Kumar, A. Resistorless Realization of First-Order Current Mode Universal Filter. Radio Sci. 2020, 55, e2019RS006932. [Google Scholar] [CrossRef]
- Banerjee, K.; Bnadopadhyaya, P.K.; Sarkar, B.; Biswas, A. Multi Input Single Output using Operational Transresistance Amplifier as First Order Filter. In Proceedings of the 2nd International Conference on VLSI Device, Circuit and System (VLSI DCS), Kolkata, India, 18–19 July 2020. [Google Scholar]
- Agrawal, D.; Maheshwari, S. An active-C current-mode universal first-order filter and oscillator. J. Circuits Syst. Comput. 2019, 28, 1950219. [Google Scholar] [CrossRef]
- Jaikla, W.; Talabthong, P.; Siripongdee, S.; Supavarasuwat, P.; Suwanjan, P.; Chaichana, A. Electronically controlled voltage mode first order multifunction filter using low-voltage low-power bulk-driven OTAs. Microelectron. J. 2019, 91, 22–35. [Google Scholar] [CrossRef]
- Singh, P.; Varshney, V.; Kumar, A.; Nagaria, R.K. Electronically tunable first order universal filter based on CCDDCCTA. In Proceedings of the 2019 IEEE Conference on Information and Communication Technology (CICT), Allahabad, India, 6–8 December 2019. [Google Scholar]
- Chaturvedi, B.; Mohan, J.; Jitender; Kumar, A. A Novel Realization of Current-Mode First Order Universal Filter. In Proceedings of the 6th International Conference on Signal Processing and Integrated Networks (SPIN), Noida, India, 7–8 March 2019; pp. 623–627. [Google Scholar]
- Chaturvedi, B.; Kumar, A.; Mohan, J. Low Voltage Operated Current-Mode First-Order Universal Filter and Sinusoidal Oscillator Suitable for Signal Processing Applications. AEU Int. J. Electron. Commun. 2019, 99, 110–118. [Google Scholar] [CrossRef]
- Chaturvedi, B.; Kumar, A. Electronically Tunable First-Order Filters and Dual-Mode Multiphase Oscillator. Circuits Syst. Signal Process. 2019, 38, 2–25. [Google Scholar] [CrossRef]
- Abaci, A.; Yuce, E. Voltage-mode first-order universal filter realizations based on subtractors. AEU Int. J. Electron. Commun. 2018, 90, 140–146. [Google Scholar] [CrossRef]
- Chinpark, K.; Jaikla, W.; Siripongdee, S.; Suwanjan, P. Electronically controllable first-order multifuntion filter with using single active building block. In Proceedings of the 3rd International Conference on Control and Robotics Engineering (ICCRE), Nagoya, Japan, 20–23 April 2018; pp. 192–195. [Google Scholar]
- Kumar, A.; Paul, S.K. Current mode first order universal filter and multiphase sinusoidal oscillator. AEU Int. J. Electron. Commun. 2017, 81, 37–49. [Google Scholar] [CrossRef]
- Safari, L.; Yuce, E.; Minaei, S. A new ICCII based resistor-less current-mode first-order universal filter with electronic tuning capability. Microelectron. J. 2017, 67, 101–110. [Google Scholar] [CrossRef]
- Yuce, E.; Minaei, S. A First-Order Fully Cascadable Current-Mode Universal Filter Composed of Dual Output CCIIs and a Grounded Capacitor. J. Circuit Syst. Comp. 2016, 25, 1650042. [Google Scholar] [CrossRef]
- Herencsar, N.; Lahiri, A.; Koton, J.; Vrba, K. First-order multifunction filter design using current amplifiers. In Proceedings of the 39th International Conference on Telecommunications and Signal Processing (TSP), Vienna, Austria, 27–29 June 2016; pp. 279–282. [Google Scholar]
- Sotner, R.; Jerabek, J.; Herencsar, N.; Prokop, R.; Lahiri, A.; Dostal, T.; Vrba, K. First-Order Transfer Sections with Reconnection-Less Electronically Reconfigurable High-Pass, All-Pass and Direct Transfer Character. J. Electr. Eng. 2016, 67, 12–20. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.A. A series of new circuits based on CFTAs. AEU Int. J. Electron. Commun. 2012, 66, 587–592. [Google Scholar] [CrossRef]
- Banerjee, K.; Ranjan, A.; Paul, S.K. New first order multifunction filter employing operational transresistance amplifier. In Proceedings of the 5th International Conference on Computers and Devices for Communication (CODEC), Kolkata, India, 17–19 December 2012. [Google Scholar]
- Horng, J.W.; Hou, C.L.; Tseng, C.Y.; Chang, R.; Yang, D.Y. Cascadable current-mode first-order and second-order multifunction filters employing grounded capacitors. Act. Passiv. Electron. 2012, 2012, 261075. [Google Scholar] [CrossRef]
- Shah, N.A.; Iqbal, S.Z.; Parveen, B. Simple first-order multifunction filter. Indian J. Pure Appl. Phys. 2004, 42, 854–856. [Google Scholar]
- 100 MHz Current Feedback Amplifier with DC Gain Control. Available online: https://www.analog.com/media/en/technical-documentation/data-sheets/1228fd.pdf (accessed on 15 February 2021).
- Duangmalai, D.; Suwanjan, P. The Voltage-Mode first order universal filter using single VD-DIBA with electronic controllability. Int. J. Electr. Comput. Eng. 2022, in press. [Google Scholar]
- Yucel, F. A DVCC-Based Current-Mode First-Order Universal Filter. J. Circuit Syst. Comp. 2021. [Google Scholar] [CrossRef]
- Mahattanakul, J.; Toumazou, C. Af theoretical study of the stability of high frequency current feedback op-amp integrators. IEEE Trans. Syst. I Fundam. Theor. Appl. 1996, 43, 2–12. [Google Scholar]
- Sansen, W. Distortion in elementary transistor circuits. IEEE Trans. Circuits Syst. II Analog. Digit. Signal Process. 1999, 46, 315–325. [Google Scholar] [CrossRef]





























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. | Mode | Number of ABB | Commercially Available IC | R + C | No use of Multiple Output ABB | Functions | Gain Controllability | Electronic Controllable | Voltage Supplies & Power Dissipation | Zero/Pole Frequency Adjustable Simultaneously by Single Parameter | Pole Frequency (Hz) | Cascade-Able at Output Node |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| [21] | CM | 2 ICCII & 1 MOS | Yes (7 AD844) | 0 + 1 | No | LP, HP, AP− | No | Yes * | ±0.75 V & 3.29 mW | Yes | 7.96 M | Yes |
| [22] Figure 2 | RM | 2 CVCII | No | 2 + 1 | Yes | LP, AP− | LP, AP | Yes | ±0.9 V & 0.385 mW to 1.057 mW | Yes | 89 k–1 M | Yes |
| [22] Figure 3 | RM | 2 CVCII | No | 2 + 1 | Yes | LP, HP | LP, HP | Yes | Yes | 89 k–1 M | Yes | |
| [23] Figure 2 | CM | 2 CCII | No | 1 + 1 | No | LP, HP, AP+ | No | No | ±1.25 V & 3.71 mW | Yes | 15.9 M | Yes |
| [23] | VM | 2 DDCC | No | 1 + 1 | Yes | LP, HP, AP+ | No | No | ±1.25 V & NA | Yes | 15.9 M | Yes |
| [24] | CM | 1 DDDXCCII & 4 MOS | No | 0 + 1 | No | LP, HP, AP− | No | Yes * | ±1.25 V & 2 mW | No | 3 M | Yes |
| [25] | VM | 1 OTRA | No | 2 + 2 | Yes | LP, HP, AP− | LP, HP | No | ±1.5 V & NA | No | 100 k | Yes |
| [26] | CM | 1 EX-CCCII | No | 0 + 1 | No | LP, HP, AP+ | No | Yes | ±1.25 V & 0.44 mW to 4.4 mW | Yes | 3.93 M | Yes |
| [27] | VM | 2 OTA | Yes | 1 + 1 | Yes | LP, HP, AP− | HP | Yes | ±0.4 V & 47.2 μW | Yes | 8.05 k | No |
| [28] | TM | 1 CCDDCCTA | No | 0 + 1 | Yes | LP, HP, AP+ | LP, HP, AP+ | Yes | ±0.9 V & NA | Yes | 1.24 M | Yes |
| [29] | CM | 1 DDDXCCII | No | 3 + 1 | No | LP, HP, AP− | No | No | ±1.2 V & NA | No | 6.43 M | Yes |
| [30] | CM | 1 DXCCTA | Yes (4 AD844, 1 LM13700) | 0 + 2 | No | LP, HP, AP− | No | Yes | ±1.25 V & 1.75 mW | No | 10 M | Yes |
| [31] Figure 1 | CM | 1 MO-DXCCTA | Yes (4 AD844, 2 LM13700) | 0 + 2 | No | LP, HP, AP− | No | Yes | ±1.25 V & 1.38 mW | Yes | 11.7 M | Yes |
| [31] Figure 2 | TM | 1 MO-DXCCTA | Yes (4 AD844, 2 LM13700) | 0 + 2 | No | LP, HP, AP− | LP, HP, AP | Yes | ±1.25 V & 1.4 mW | Yes | 11.7 M | Yes |
| [32] | VM | 2 subtractor | Yes (4 AD844) | 1 + 1 | Yes | LP, HP, AP+, AP− | No | No | ±0.75 V & 1.77 mW | Yes | 6.37 M | Yes (HP & AP) |
| [33] | VM | 1 M-CCCCTA | No | 1 + 1 | Yes | LP, HP, AP− | HP | Yes | ±2.5 V & NA | Yes | 286.21 k | No |
| [34] | CM | 1 DX-MOCCII | No | 1 + 1 | No | LP, HP, AP+, AP− | No | No | ±0.75 V & 2.75 mW | Yes | 7.96 M | Yes |
| [35] | CM | 2 ICCII & 1 MOS | No | 0 + 1 | No | LP, HP, AP−, AP+ | No | Yes * | ±0.75 V & 4.08 mW | Yes | 2.6 M | Yes |
| [36] | CM | 2 DO-CCII | No | 1 + 1 | No | LP, HP, AP+ | No | Yes | ±5 V & 25.7 mW | Yes | 6.36 M | Yes |
| [37] | CM | 3 PCA | No | 1 + 1 | No | LP, HP, AP+, AP− | LP, HP, AP+, AP− | Yes | ±5 V & NA | Yes | 100 k | Yes |
| [38] | VM | 1 ZC-CCCFDTA & 1 CA | Yes (1 AD830, 1 VCA610, 1 EL4083, 2 OPA660) | 1 + 1 | No | HP, AP+, AP− | No | Yes | ±1.5 V & NA | Yes | 339 k | No |
| [39] | CM | 1 CFTA | No | 0 + 1 | No | LP, HP, AP+, AP− | No | Yes | ±1.5 V & NA | Yes | NA | Yes |
| [40] | VM | 3 OTRA | No | 6 + 3 | Yes | LP, HP, AP+ | No | No | ±1.25 V & NA | No | 100 k | Yes |
| [41] | CM | 2 CCII | No | 2 + 1 | No | LP, HP, AP+ | No | No | NA | No | 1.326 M | Yes |
| [42] | VM | 2 CCII | Yes (3 AD844) | 4 + 1 | Yes | LP, HP, AP+ | LP | No | NA | Yes | 200 k | No |
| [43] | VM | 1 LT1228 | Yes | 6 + 1 | Yes | LP, HP, AP− | LP, HP | Yes | NA | Yes | 100 k | Yes |
| [44] | VM | 1 VD-DIBA | Yes (1 LT1228, 1 AD830 | 2 + 1 | Yes | LP, HP, AP−, AP+ | LP, HP | Yes | ±5 V & NA | Yes | 159.15 k | Yes |
| [45] | CM | 2 DVCC | Yes (10 AD844) | 1 + 1 | LP, HP, AP−, AP+ | No | No | ±1.25 V & 3.65 mW | Yes | 1.99 M | Yes | |
| This work | VM | 1 LT1228 | Yes | 2 + 1 | Yes | LP, HP, AP−, AP+ | LP, HP | Yes | ±5 V & 57.6 mW | Yes | 90 k | Yes |
| Input | Transfer Function | Filtering Function | Pass-Band Gain | Phase Response | Pole Frequency | ||
|---|---|---|---|---|---|---|---|
| vin1 | vin2 | vin3 | |||||
| 1 | 0 | 0 | High-pass (HP) | ||||
| 0 | 1 | 0 | Low-pass (LP) | ||||
| 1 | 0 | 1 | Non-inverting all-pass (AP+) | 1 | |||
| 0 | 1 | 1 | Inverting all-pass (AP−) | 1 | |||
| Filtering Function | Transfer Function | Pass-Band Gain | Phase Response | Pole Frequency |
|---|---|---|---|---|
| High-pass | ||||
| Low-pass | ||||
| Non-inverting all-pass | where | |||
| Inverting all-pass | where |
| Filtering Function | Pole Frequency (kHz) | Pass-Band Gain (dB) | Phase Response (Degree) | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Expect | Simulation | Experiment | Expect | Simulation | Experiment | Expect | Simulation | Experiment | |
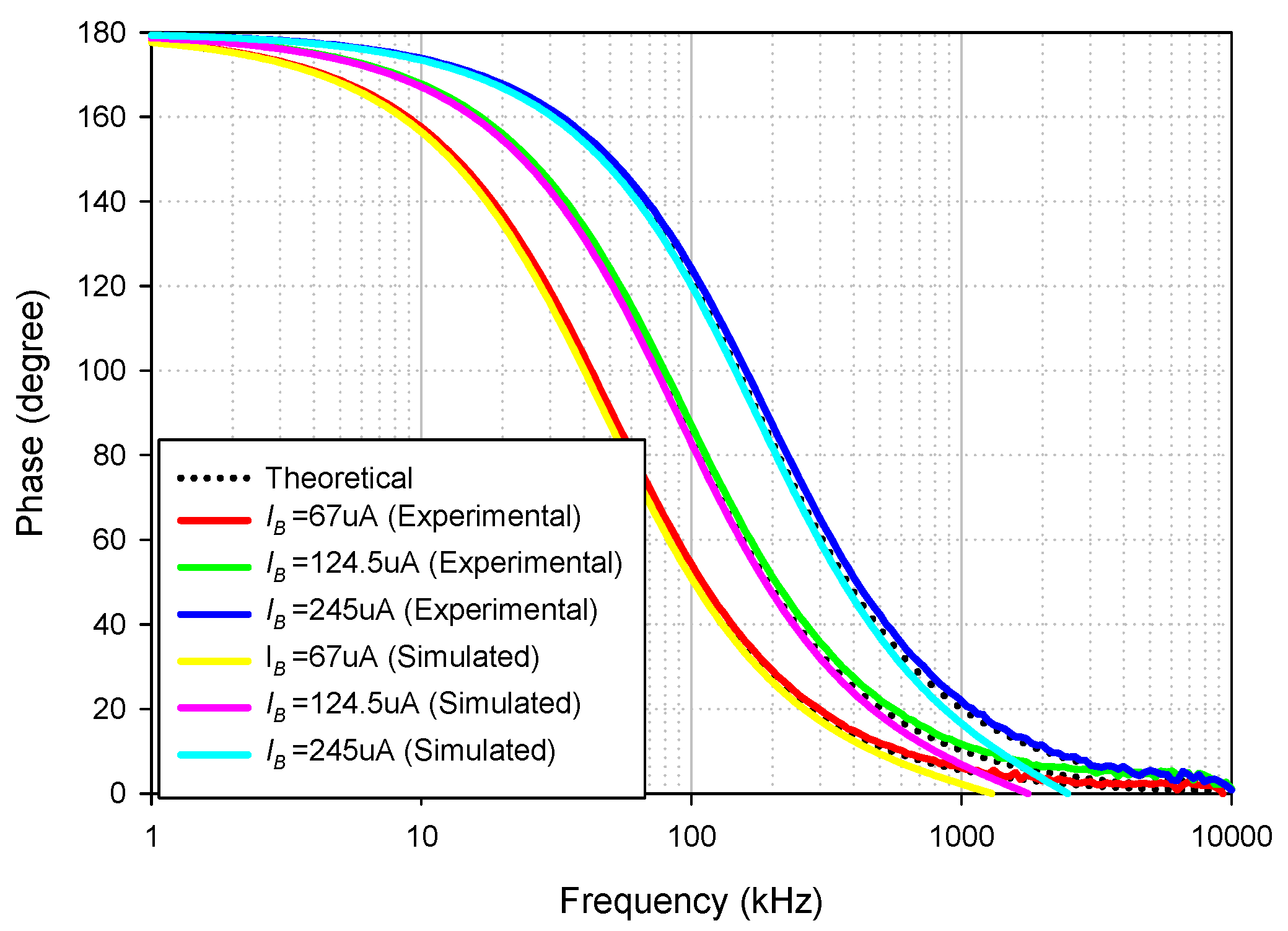
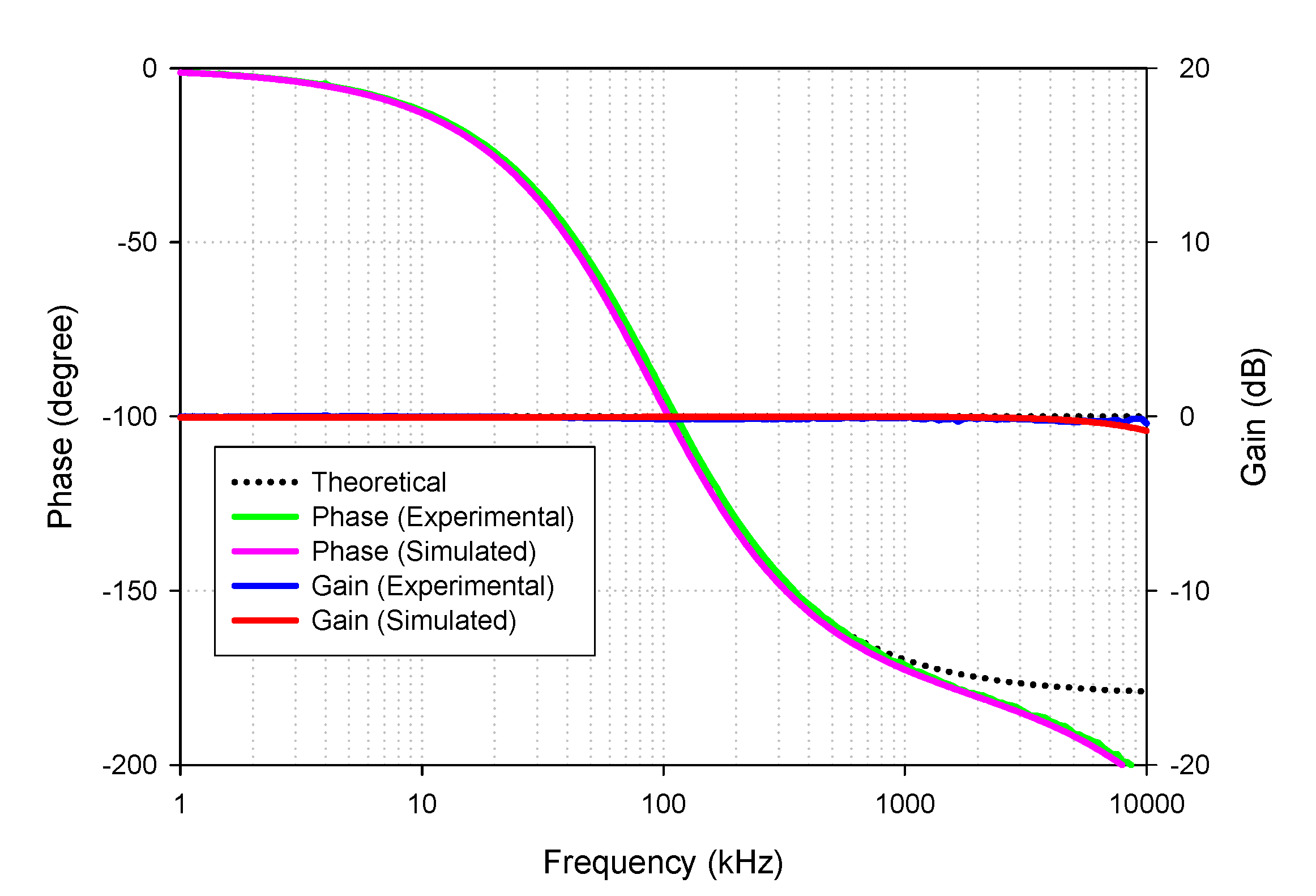
| High-pass | 90 | 87.98 | 91.20 | 6.02 | 5.89 | 5.97 | 45 | 44.37° | 44.59° |
| Low-pass | 90 | 87.63 | 91.20 | 6.02 | 5.92 | 6.01 | −45 | −45.76° | −44.34° |
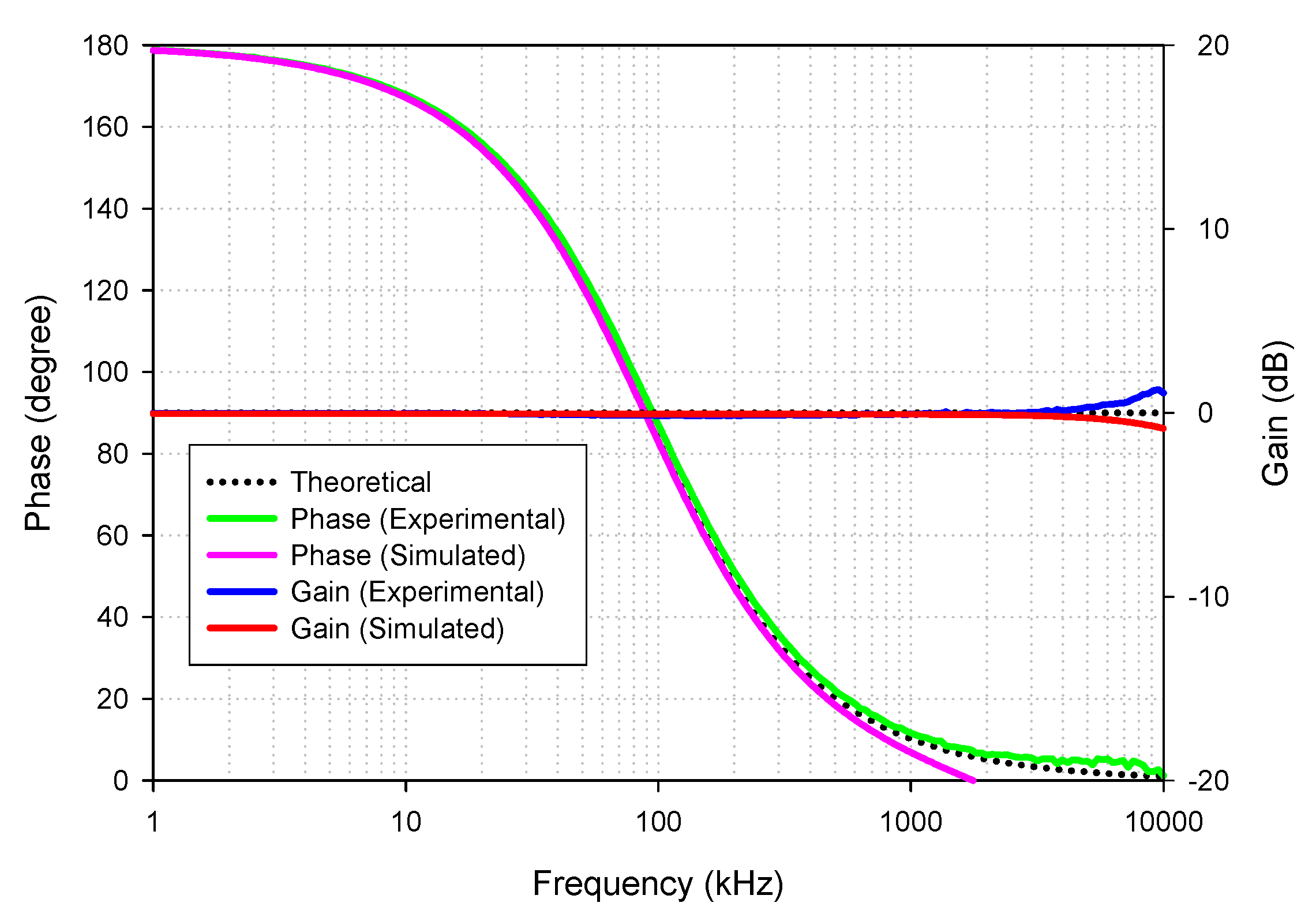
| Non-Inverting all-pass | 90 | 88.73 | 95.45 | 0 | −0.065 | −0.15 | 90 | 88.95° | 92.28° |
| Inverting all-pass | 90 | 88.57 | 95.45 | 0 | −0.037 | −0.15 | −90 | −91.18° | −87.97° |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jaikla, W.; Buakhong, U.; Siripongdee, S.; Khateb, F.; Sotner, R.; Silapan, P.; Suwanjan, P.; Chaichana, A. Single Commercially Available IC-Based Electronically Controllable Voltage-Mode First-Order Multifunction Filter with Complete Standard Functions and Low Output Impedance. Sensors 2021, 21, 7376. https://doi.org/10.3390/s21217376
Jaikla W, Buakhong U, Siripongdee S, Khateb F, Sotner R, Silapan P, Suwanjan P, Chaichana A. Single Commercially Available IC-Based Electronically Controllable Voltage-Mode First-Order Multifunction Filter with Complete Standard Functions and Low Output Impedance. Sensors. 2021; 21(21):7376. https://doi.org/10.3390/s21217376
Chicago/Turabian StyleJaikla, Winai, Unchittha Buakhong, Surapong Siripongdee, Fabian Khateb, Roman Sotner, Phamorn Silapan, Peerawut Suwanjan, and Amornchai Chaichana. 2021. "Single Commercially Available IC-Based Electronically Controllable Voltage-Mode First-Order Multifunction Filter with Complete Standard Functions and Low Output Impedance" Sensors 21, no. 21: 7376. https://doi.org/10.3390/s21217376