Hybrid Ćirić Type Graphic Υ,Λ-Contraction Mappings with Applications to Electric Circuit and Fractional Differential Equations



1
Department of Mathematics, International Islamic University, H-10, Islamabad 44000, Pakistan
2
Department of Mathematics, Taiz University, Taiz P.O.Box 6803, Yemen
3
Nonlinear Analysis Research Group, Ton Duc Thang University, Ho Chi Minh City 758307, Vietnam
4
Faculty of Mathematics and Statistics, Ton Duc Thang University, Ho Chi Minh City 758307, Vietnam
5
Institute of Research and Development of Processes, University of the Basque Country, Leioa (Bizkaia), 48940 Leioa, Spain
*
Authors to whom correspondence should be addressed.
Symmetry 2020, 12(3), 467; https://doi.org/10.3390/sym12030467
Submission received: 19 January 2020
/
Revised: 5 March 2020
/
Accepted: 8 March 2020
/
Published: 16 March 2020
(This article belongs to the Special Issue Advances in Nonlinear, Discrete, Continuous and Hamiltonian Systems)
{kind=link}
{kind=link}
{kind=link}
Abstract
:In this paper, we initiate the notion of Ćirić type rational graphic -contraction pair mappings and provide some new related common fixed point results on partial b-metric spaces endowed with a directed graph G. We also give examples to illustrate our main results. Moreover, we present some applications on electric circuit equations and fractional differential equations.
1. Introduction and Preliminaries
The Banach principle [1] has been improved and generalized by several researchers for different kinds of contractions in various spaces. One of these generalizations corresponding to an -contraction, has been established by [2]. Recently, Ameer et al. [3] introduced common fixed point results for generalized multivalued -contractions in -complete partial b-metric spaces. Ameer et al. [4,5] introduced common fixed point results for generalized multivalued - contractions in complete metric, b-metric spaces. Ameer et al. [6] initiated the notion of rational -contractive pair of mappings (where ℜ is a binary relation) and established new common fixed point results for these mappings in complete metric spaces. On the other hand, Bakhtin [7] investigated the concept of b-metric spaces. Subsequently, Czerwik [8] initiated the study of fixed point results in b-metric spaces and proved an analogue of Banach’s fixed point theorem. Matthews [9] gave the concept of a partial metric space and proved and Banach fixed point result. Shukla [10] extended the notion of a partial metric to a partial b-metric. Afterwards, numerous research articles have been dealt with fixed point theorems for various classes of single-valued and multi-valued operators in b-metric and partial b-metric spaces (see, for example, [3,11,12,13,14,15,16,17,18,19,20,21,22,23,24,25,26]). In this article, we shall investigate fixed points of Ćirić type rational graphic -contraction pair mappings on partial b-metric spaces endowed with a directed graph G.
Matthews [9] generalized the notion of a metric as follows:
Definition 2
([9]). Let M be a nonempty set. A mapping is said to be a partial metric if for all , P satisfies following axioms;
- if and only if ;
- ;
- ;
- .
The pair is called a partial metric space.
Shukla [10] generalized the notion of a partial metric as follows:
Definition 3
([10]). Let M be a nonempty set and a real number. A mapping is said to be a partial b-metric if for all , satisfies the following axioms:
- if and only if ;
- ;
- ;
- .
The pair is called a partial b-metric space (with coefficient s).
Remark 1.
The self distance , referring to the size or weight of , is a feature used to describe the amount of information contained in M.
Remark 2.
Obviously, every partial metric space is a partial b-metric space with coefficient , and every b-metric space is a partial b-metric space with zero self-distance. However, the converse of this fact need not hold.
Definition 4
([10]). Let be a partial b-metric space with coefficient . Let be a sequence in M and . Then
- (i)
- is said to be convergent to if .
- (ii)
- is said to be Cauchy sequence if exists and is finite.
- (iii)
- is said to be complete if every Cauchy sequence is convergent in M.
Lemma 1
([10]). Let be a partial b-metric space.
- (1)
- Every Cauchy sequence in is also Cauchy in and vice versa;
- (2)
- is complete if and only if is a complete metric space;
- (3)
- The sequence is convergent to some if and only ifDenote a metric space by MS.
Definition 5
([27]). Let be a MS. is called an F-contraction self-mapping, if there exist and so that
where ϝ is the family of functions such that
(F1) F is strictly increasing;
(F2) For each sequence ,
(F3) There exists such that .
Theorem 1
([27]). Let be a complete MS and be an F- contraction mapping. Then T possesses a unique fixed point .
Piri and Kumam [28] modified the set of functions .
Definition 6
([28]). Let be a MS. is said to be a F-contraction self-mapping if there exist and such that
where is the set of functions satisfying the following conditions:
(F1) F is strictly increasing, i.e., for all with , ;
(F2) For each positive real sequence ,
(F3) F is continuous.
Definition 7.
Let be a MS. A mapping is said to be a θ-contraction, if there exist and a real constant such that
where Θ is the set of functions such that:
() θ is non-decreasing;
() for each positive sequence ,
() there exist and such that
() θ is continuous.
The main result of Jleli and Samet [29] is
Theorem 2
([29]). Let be a complete MS. Let be a θ-contraction mapping. Then there exists a unique fixed point of T.
As in [2], the family of functions verifies:
() is non-decreasing;
() for each positive sequence
() is continuous, is denoted by .
Theorem 3
([2]). Let be a self-mapping on the complete MS . The following statements are equivalent:
(i) T is a θ-contraction mapping with
() T is an F-contraction mapping with
As in [31], a function satisfies:
(i) is monotone increasing, that is, ;
() for all , where stands for the nth iterate of is called a comparison function. Clearly, if is a comparison function, then for each .
Lemma 2
Example 1
([31]). The following functions are comparison functions:
(i) with , for each ;
() , for each
Denote by the set of functions verifying:
() is non-decreasing;
() for each positive sequence ,
() is continuous. Liu et al. [2] initiated the concept of ()-Suzuki contractions.
Definition 8.
Let be a MS. A mapping is said to be a -Suzuki contraction, if there exist comparison functions Υ and such that, for all with ,
where
Moreover, let be a partial metric space, and denotes the diagonal of . Let G be a directed graph, which has no parallel edges such that the set of its vertices coincides with M, and contains all loops (i.e., ). Hence, G is identify by the pair (). Denote by the graph obtained from G by reversing the direction of its edges. That is,
It is more adaptable to treat a directed graph for which the set of its edges is symmetric. Under this convention, we have that
In , we define the relation R in the following way: for , we have if and only if there is a path in G from to . If G is such that is symmetric, then for , the equivalence class in defined by the relation R is . Recall that if : is an operator; then, by we denote the set of all fixed points of . Let
Property: A graph is said to satisfy property if for any sequence in with as , for implies that there is a subsequence of with an edge between and for . Throughout this paper, G is a weighted graph such that the weight of each vertex is , and the weight of each edge is . Since is a partial b-metric space, the weight assigned to each vertex need not to be zero, and whenever a zero weight is assigned to some edge , it reduces to a loop .
2. Main Results
We start with the following definition.
Definition 9.
Let be a partial b-metric space endowed with a directed graph and be self-mappings of M. We say that the pair is a Ćirić type rational graphic -contraction pair, if:
(1) For every vertex , we have
(2) There exists a comparison function Υ and such that for all with and we have
where,
Remark 3.
If , then we say that ϕ is a Ćirić type rational graphic -contraction.
Our first main result is the following.
Theorem 4.
Let be a complete partial b-metric space endowed with a directed graph G. Let be maps such that is a Ćirić type rational graphic -contraction pair. If Υ is continuous, then the following assertions hold:
(a) or if and only if ;
(b) If then the weight assigned to the vertex is 0;
(c) , provided that G satisfies property
(d) is a complete set if and only if is a singleton set.
Proof.
(a) Let , so there exists . Then there is an edge between and , so . Now, we shall prove that ; that is, the weight assigned to the edge is zero. Assume, on the contrary, that a non zero weight is assigned to the edge . As and is a Ćirić type rational graphic -contraction pair, from (1), we have
where
Thus,
It is a contradiction. Hence, the weight assigned to the edge is zero; that is, Thus,
Therefore,
Conversely, let . So there exists such that and then and Thus, the proof of (a) is ended.
(b) Let Suppose on the contrary that the weight assigned to the vertex is nonzero. As and is a Ćirić type rational graphic -contraction pair, we get
where
It implies that
which is a contradiction. Therefore, the weight assigned to the edge is zero. The proof of (b) is completed.
(c) Let . If or , then from (a) the proof is finished. Assume that ; then . Since there is an edge between and , that is, , this implies that there is such that . Similarly, implies . Continuing this process, we can construct the sequence such that is defined by
If the weight assigned to the edge is zero for some then , which implies , and from (a), . Then there is nothing to prove. Assume that the weight assigned to the edge is non zero for all ; that is, for all . By (1), we get
It yields that
Due to property (), we get
Analogously, one can find that
Similarly, one gets
From and Lemma 2, we get
Further, from () we have
We will prove that is -Cauchy. We argue by contradiction. Assume that there exist and a sequence and of natural numbers such for all with Therefore,
Letting in (10), we get
From triangular inequality, we have
and
Again, by taking the upper limit as in (13), we get
Thus
Similarly,
By triangular inequality, we have
Following the above process, we find
Thus,
It is a contradiction. Therefore, is Cauchy. Since ( is a complete partial b-metric space, by Lemma 1, is a complete b-metric space. Therefore, the sequence converges to some . Again, by Lemma 1, there exists such that
if and only if
Now, we show that , so the weight assigned to the edge is zero. Suppose that . If , , then we get . By property (), there is a subsequence of with an edge between and for . Using (1), one gets
Taking the upper limit as in (22) and using the continuity of , we have
a contradiction. Therefore, the assigned weight of the edge is zero; that is, Similarly, . Hence, The proof of (c) is completed.
(d) First, we assume that is complete. We shall prove that is a singleton. On the contrary, suppose that there exists such that As so from (1), we have
It is a contradiction. Thus,
Conversely, assume that is a singleton; then, is complete. □
Example 2.
Let and defined by , for all Then is a complete partial b-metric space with . Set
Define by
and by
It is easy to show that, for every vertex , we have . Now, for all with
If in Theorem 4, we obtain the following result.
Corollary 1.
Let be a complete partial b-metric space endowed with a directed graph G and the map such that ϕ is a Ćirić type rational graphic -contraction. If Υ is continuous, then the following assertions hold:
(a) If then the weight assigned to the vertex is 0;
(b) , provided that G satisfies property
(c) is a complete set if and only if is a singleton set.
If in Theorem 4, we obtain the following result.
Theorem 5.
Let be a complete partial metric space endowed with a directed graph G. Let be maps such that:
(1) For every vertex , we have
(2) There exist a comparison function Υ and such that for all with and we have
where
If Υ is continuous, then the following assertions hold:
(a) or if and only if ;
(b) If then the weight assigned to the vertex is 0;
(c) , provided that G satisfies the property
(d) is complete set if and only if is a singleton set.
Example 3.
Let and be defined by , for all Then, is a complete partial metric space. Set
Define by
and by
It is easy to show that, for every vertex , we have . Now, for all with
Therefore, is a Ćirić type rational graphic -contraction pair. Hence, the conditions of Theorem 5 hold. Moreover, 0 is a common fixed point of and .
3. Some Consequences
Corollary 2.
Let be a complete partial b-metric space () endowed with a directed graph G. Let be maps such that:
(1) For every vertex , we have
(2) There exist and such that for all with and we have
where
Then the following assertions hold:
(a) or if and only if ;
(b) If then the weight assigned to the vertex is 0;
(c) , provided that G satisfies property
(d) is a complete set if and only if is a singleton set.
Proof.
It suffices to take in Theorem 4, and □
Corollary 3.
Let be a complete partial b-metric space ) endowed with a directed graph G. Let be maps such that:
(1) For every vertex , we have
(2) There exist and such that for all with and we have
where
Then the following assertions hold:
(a) or if and only if ;
(b) If then the weight assigned to the vertex is 0;
(c) , provided that G satisfies property
(d) is a complete set if and only if is a singleton set.
Proof.
The result follows from Theorem 4 by taking and □
Corollary 4.
Let be a complete partial b-metric space () endowed with a directed graph G. Let be maps such that:
(1) For every vertex , we have
(2) If for all with ,
where
and is such that for each .
Then the following assertions hold:
(a) or if and only if ;
(b) If then the weight assigned to the vertex is 0;
(c) , provided that G satisfies property
(d) is a complete set if and only if is a singleton set.
Proof.
It follows from Theorem 4 by taking and □
4. Applications
4.1. Application to Electric Circuit Equations
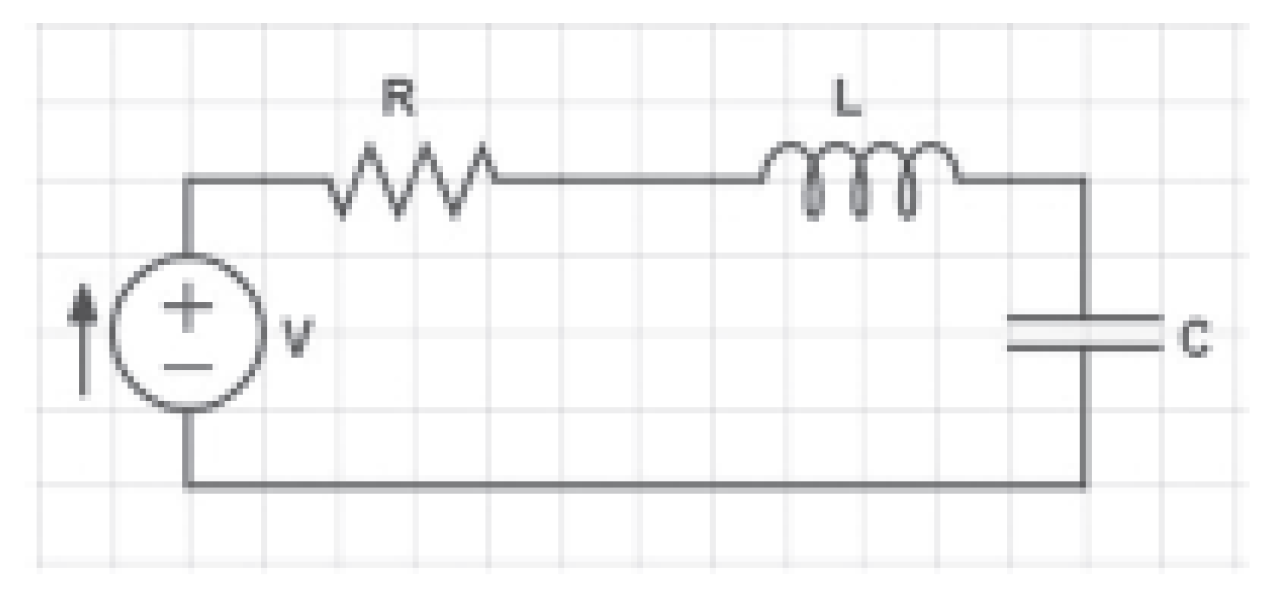
In this section, we study the solution of the electric circuit equation (see [32]), which is in the second-order differential equation form. The electric circuit (as in Figure 3):
Contains an electromotive force E, a resistor R, an inductor L, a capacitor C, and a voltage V in series. If the current I is the rate of change of charge q with respect to time t, we have and
By law of Kirchhoffs voltage, the sum of these voltage drops is equal to the supplied voltage; i.e,
or
The Green function associated to (23) is given by
where the constant is calculated in terms of R and L.
Let be the set of all continuous functions defined on . The partial b-metric on M is defined by
Moreover, we define the graph G with the partial ordered relation:
for all Let Note that is a complete partial b-metric space with coefficient , including a directed graph G. Clearly, , and has property .
Theorem 6.
Let of a partial b-metric space . Suppose that the following assumptions hold:
(1) There exists a continuous and non decreasing function K: such that for all , with
where
where , and
Proof.
The above problem is equivalent to the integral equation:
where . Consider a mapping defined by
where . Then, is a solution of (24) if and only if is a fixed point of . From Condition (2), it is easy to show that for every , we have ; i.e., . It follows from Condition (2) that . Let ; then, from Condition (1), we have
Thus,
This implies that
Since , we get that
Hence,
Taking and with , one gets
or
Therefore, from Corollary 1, has a fixed point. Consequently, the differential equation arising in the electric circuit Equation (23) has a solution. □
4.2. Application to Fractional Differential Equations
We apply the result given by Theorem 4 to study the existence of a solution for a system of nonlinear fractional differential equations (see [33]). Let be the space of all continuous functions on . The partial b-metric on M is defined by
Moreover, we define the graph G with the partial ordered relation:
for all Let Note that is a complete partial b-metric space with coefficient , including a directed graph G. Clearly, and has property .
Consider the following system of fractional differential equations:
with boundary conditions
Note that denotes the Caputo fractional derivative of order defined by
where
and and denote the Riemann–Liouville fractional integral of order of continuous functions and , given by
The system (23) can be written in the following integral form:
Theorem 7.
Assume that the following conditions hold:
(i) are continuous functions;
(ii) are increasing functions,
(iii) For all , with we have
where,
(iv) There exist such that for all , we have
Then the system (23) has a solution.
Proof.
Define the mappings by
Following assumptions (iii) and (iv), we have
where is the beta function. From the inequality (27), we obtain that
Hence,
This implies that
where and , Since the above inequality holds for all with , it is true for any Hence, we have
Therefore, all hypotheses of Theorem 4 are satisfied. Hence, and have a common fixed point; that is, the system (26) has at least one solution. □
5. Conclusions
In this paper, we introduced the concept of a Ćirić type rational graphic -contraction pair of mappings and established some new results for such contractions in the context of complete partial b-metric spaces endowed with a directed graph. Moreover, we give some examples in support of main theorems. At the end, we applied our main results to provide solutions of electric circuit equations and also of fractional differential equations. The obtained results generalize several corresponding results in metric spaces.
Author Contributions
All authors contributed equally and read and agreed to the published version of the manuscript.
Funding
Basque Government through grant IT1207/19.
Acknowledgments
The authors are grateful to the Basque Government for its support of this work through grant IT1207/19.
Conflicts of Interest
The authors declare that they have no competing interests.
Availability of Data and Material
Not applicable.
References
- Banach, S. Sur les opérations dans les ensembles abstraits et leur application aux equations itegrales. Fund. Math. 1922, 3, 133–181. [Google Scholar] [CrossRef]
- Liu, X.D.; Chang, S.S.; Xiao, Y.; Zhao, L.C. Some fixed point theorems concerning ψ,φ-type contraction in complete metric spaces. J. Nonlinear Sci. Appl. 2016, 9, 4127–4136. [Google Scholar] [CrossRef]
- Ameer, E.; Aydi, H.; Arshad, M.; Alsamir, H.; Noorani, M.S. Hybrid multivalued type contraction mappings in αK-complete partial b-metric spaces and applications. Symmetry 2019, 11, 86. [Google Scholar] [CrossRef] [Green Version]
- Ameer, E.; Arshad, M.; Shin, D.Y.; Yun, S. Common fixed point theorems of generalized multivalued (ψ,φ)-contractions in complete metric spaces with application. Mathematics 2019, 7, 194. [Google Scholar] [CrossRef] [Green Version]
- Ameer, E.; Arshad, M.; Hussain, N. On new common fixed points of multivalued (Υ,Λ)-contractions in complete b-metric spaces and related application. Math. Sci. 2019, 13, 307–316. [Google Scholar] [CrossRef] [Green Version]
- Ameer, E.; Nazam, M.; Aydi, H.; Arshad, M.; Mlaiki, N. On (Λ,Υ,ℜ)-contractions and applications to nonlinear matrix equations. Mathematics 2019, 7, 443. [Google Scholar] [CrossRef] [Green Version]
- Bakhtin, I.A. The contraction mapping principle in almost metric spaces. Funct. Anal. 1989, 30, 26–37. [Google Scholar]
- Czerwik, S. Nonlinear set-valued contraction mappings in b-metric spaces. Atti Semin. Mat. Fis. Univ. Modena 1998, 46, 263–276. [Google Scholar]
- Matthews, S.G. Partial Metric Topology. Ann. N. Y. Acad. Sci. 1994, 728, 183–197. [Google Scholar] [CrossRef]
- Shukla, S. Partial b-metric spaces and fixed point theorems. Mediterr. J. Math. 2014, 11, 703–711. [Google Scholar] [CrossRef]
- Aydi, H.; Barakat, M.A.; Mitrovć, Z.D.; Cavic, V.S. A Suzuki type multi-valued contraction on weak partial metric spaces and applications. J. Inequal. Appl. 2018, 2018, 270. [Google Scholar] [CrossRef] [PubMed]
- Wardowski, D.; Dung, N.V. Fixed points of F-weak contractions on complete metric spaces. Demonstr. Math. 2014, 47, 146–155. [Google Scholar] [CrossRef]
- Aydi, H.; Felhi, A.; Karapinar, E.; Sahmim, S. A Nadler-type fixed point theorem in dislocated spaces and applications. Miscolc Math. Notes 2018, 19, 111–124. [Google Scholar] [CrossRef] [Green Version]
- Alamgir, N.; Kiran, Q.; Isik, H.; Aydi, H. Fixed point results via a Hausdorff controlled type metric. Adv. Differ. 2020, 2020, 24. [Google Scholar] [CrossRef] [Green Version]
- Huang, H.; Vujakovic, J.; Radenovic, S. A note on common fixed point theorems for isotone increasing mappings in ordered b-metric spaces. J. Nonlinear Sci. Appl. 2015, 8, 808–815. [Google Scholar] [CrossRef]
- Hussain, N.; Doric, D.; Kadelburg, Z.; Radenovic, S. Suzuki-type fixed point results in metric type spaces. Fixed Point Theory Appl. 2012, 2012, 126. [Google Scholar] [CrossRef] [Green Version]
- Jovanovic, M.; Kadelburg, Z.; Radenovic, S. Common fixed point results in metric-type spaces. Fixed Point Theory Appl. 2010, 2010, 978121. [Google Scholar] [CrossRef] [Green Version]
- Afshari, H.; Aydi, H.; Karapinar, E. On generalized α-ψ-Geraghty contractions on b-metric spaces. Georg. J. 2020, 27, 9–21. [Google Scholar] [CrossRef] [Green Version]
- Parvaneh, V.; Roshan, J.R.; Radenovic, S. Existence of tripled coincidence points in ordered b-metric spaces and an application to a system of integral equations. Fixed Point Theory Appl. 2013, 2013, 130. [Google Scholar] [CrossRef] [Green Version]
- Roshan, J.R.; Parvaneh, V.; Shobkolaei, N.; Sedghi, S.; Shatanawi, W. Common fixed points of almost generalized (ψ,ϕ)s-contractive mappings in ordered b-metric spaces. Fixed Point Theory Appl. 2013, 2013, 159. [Google Scholar] [CrossRef] [Green Version]
- Abdeljawad, T.; Mlaiki, N.; Aydi, H.; Souayah, N. Double controlled metric type spaces and some fixed point results. Mathematics 2018, 6, 320. [Google Scholar] [CrossRef] [Green Version]
- Mlaiki, N.; Aydi, H.; Souayah, N.; Abdeljawad, T. Controlled metric type spaces and the related contraction principle. Mathematics 2018, 6, 194. [Google Scholar] [CrossRef] [Green Version]
- Qawaqneh, H.; Noorani, M.S.M.; Shatanawi, W.; Aydi, H.; Alsamir, H. Fixed point results for multi-valued contractions in b-metric spaces and an application. Mathematics 2018, 7, 132. [Google Scholar] [CrossRef] [Green Version]
- Karapinar, E.; Czerwik, S.; Aydi, H. (α,ψ)-Meir-Keeler contraction mappings in generalized b-metric spaces. Funct. Spaces 2018, 2018, 3264620. [Google Scholar] [CrossRef] [Green Version]
- Kamran, T.; Postolache, M.; Ali, M.U.; Kiran, Q. Feng and Liu type F-contraction in b-metric spaces with application to integral equations. J. Math. Anal. 2016, 7, 18–27. [Google Scholar]
- Vujakovic, J.; Aydi, H.; Radenovic, S.; Mukheimer, A. Some remarks and new results in ordered partial b-metric spaces. Mathematics 2019, 7, 334. [Google Scholar] [CrossRef] [Green Version]
- Wardowski, D. Fixed points of a new type of contractive mappings in complete metric spaces. Fixed Point Theory Appl. 2012, 2012, 6. [Google Scholar] [CrossRef] [Green Version]
- Piri, H.; Kumam, P. Some fixed point theorems concerning F-contraction in complete metric spaces. Fixed Point Theory Appl. 2014, 2014, 210. [Google Scholar] [CrossRef] [Green Version]
- Jleli, M.; Samet, B. A new generalization of the Banach contraction principle. J. Inequal. Appl. 2014, 2014, 34. [Google Scholar] [CrossRef] [Green Version]
- Jleli, M.; Karapinar, E.; Samet, B. Further generalizations of the Banach contraction principle. J. Inequal. Appl. 2014, 2014, 439. [Google Scholar] [CrossRef] [Green Version]
- Berinde, V. Generalized Contractions and Applications; Editura Cub Press 22: Baia Mare, Romania, 1997. [Google Scholar]
- Ali, M.U.; Kamran, T. Multivalued F-contractions and related fixed point theorems with an application. Filomat 2016, 30, 3779–3793. [Google Scholar] [CrossRef] [Green Version]
- Aydi, H.; Jleli, M.; Samet, B. On positive solutions for a fractional thermostat model with a convex-concave source term via ψ-Caputo fractional derivative. Mediterr. J. Math. 2020, 17, 16. [Google Scholar] [CrossRef]
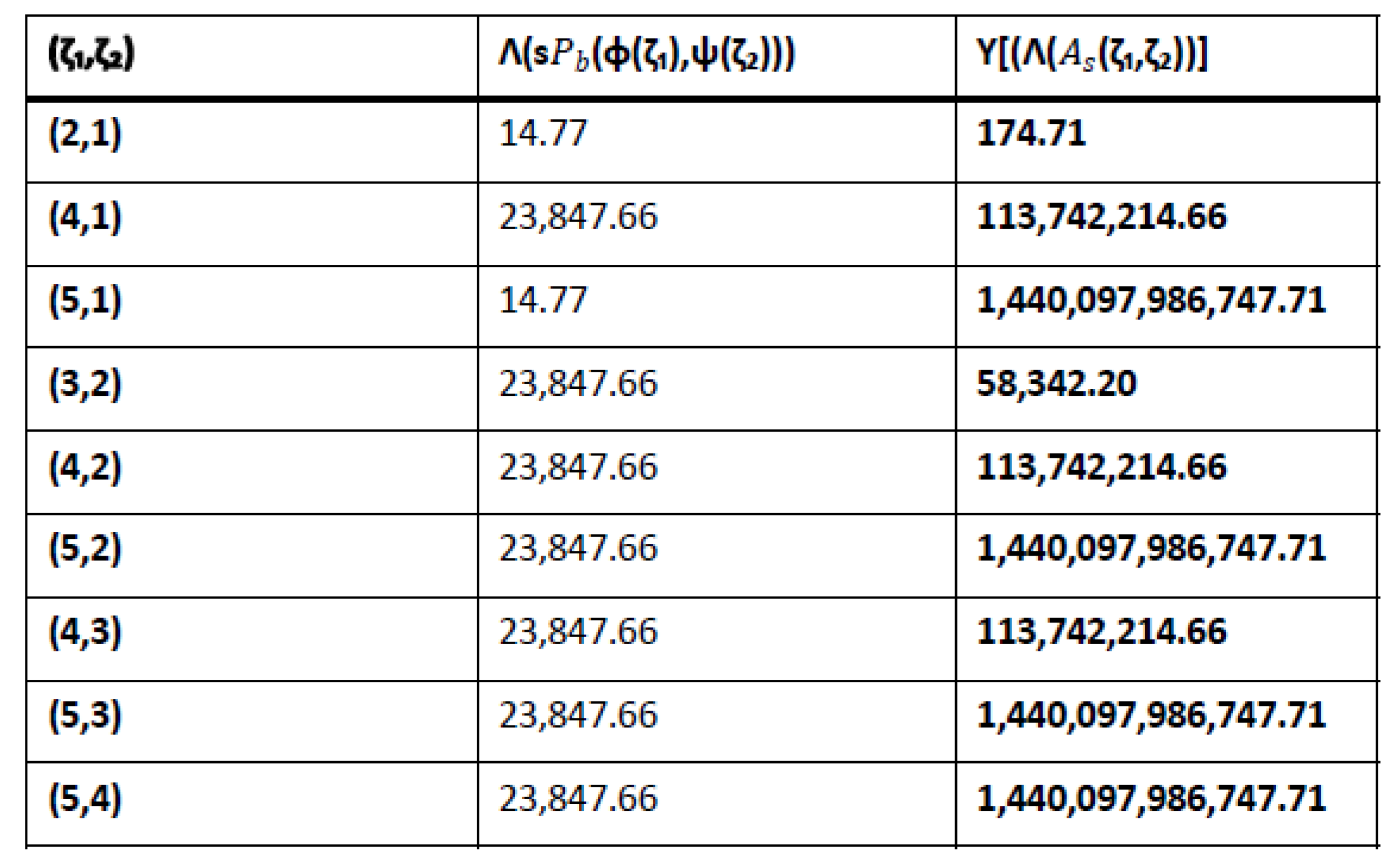
Figure 1.
Verification of the contraction (1).
Figure 1.
Verification of the contraction (1).

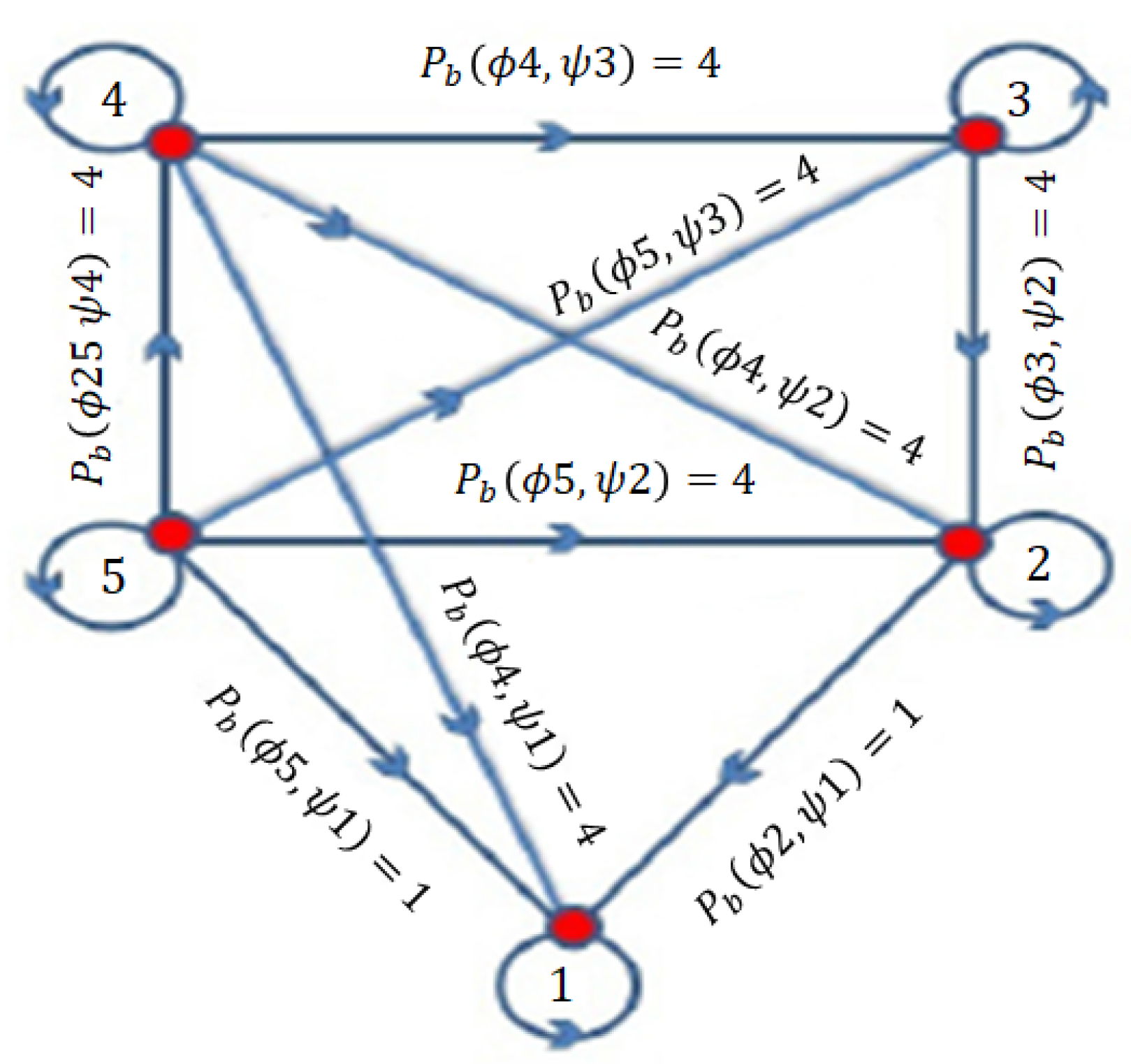
Figure 2.
The graph defined in Example 2.

Figure 3.
Electric Circuit.

© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Ameer, E.; Aydi, H.; Arshad, M.; De la Sen, M. Hybrid Ćirić Type Graphic Υ,Λ-Contraction Mappings with Applications to Electric Circuit and Fractional Differential Equations. Symmetry 2020, 12, 467. https://doi.org/10.3390/sym12030467
AMA Style
Ameer E, Aydi H, Arshad M, De la Sen M. Hybrid Ćirić Type Graphic Υ,Λ-Contraction Mappings with Applications to Electric Circuit and Fractional Differential Equations. Symmetry. 2020; 12(3):467. https://doi.org/10.3390/sym12030467
Chicago/Turabian StyleAmeer, Eskandar, Hassen Aydi, Muhammad Arshad, and Manuel De la Sen. 2020. "Hybrid Ćirić Type Graphic Υ,Λ-Contraction Mappings with Applications to Electric Circuit and Fractional Differential Equations" Symmetry 12, no. 3: 467. https://doi.org/10.3390/sym12030467
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.