
Overvoltage Prevention and Curtailment Reduction Using Adaptive Droop-Based Supplementary Control in Smart Inverters


Abstract
:1. Introduction
2. Control Formulation and Design
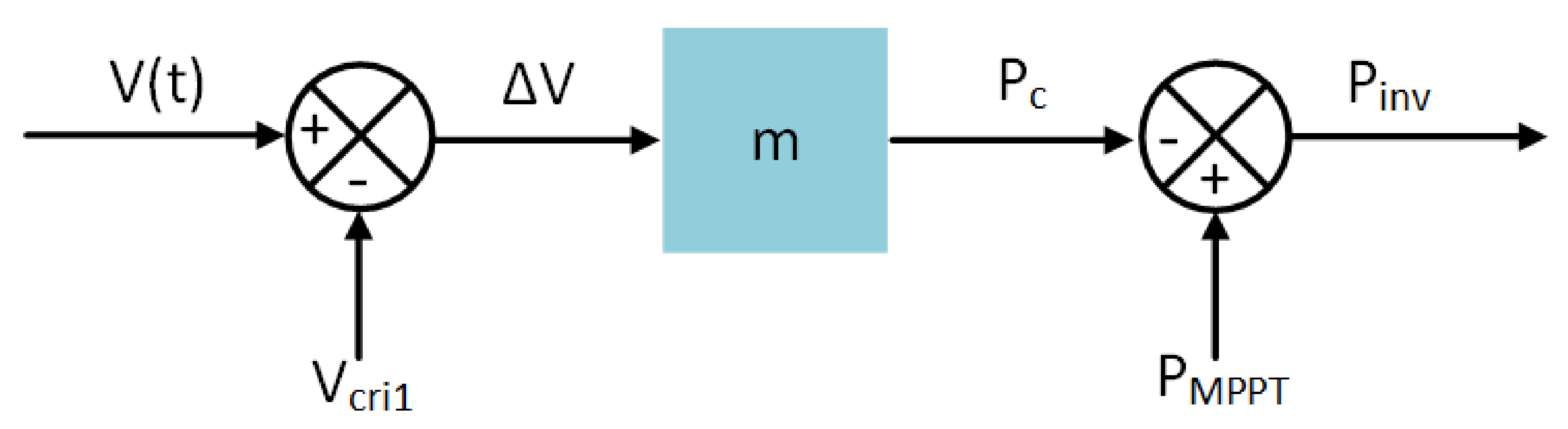
2.1. Droop Control for Active Power Curtailment
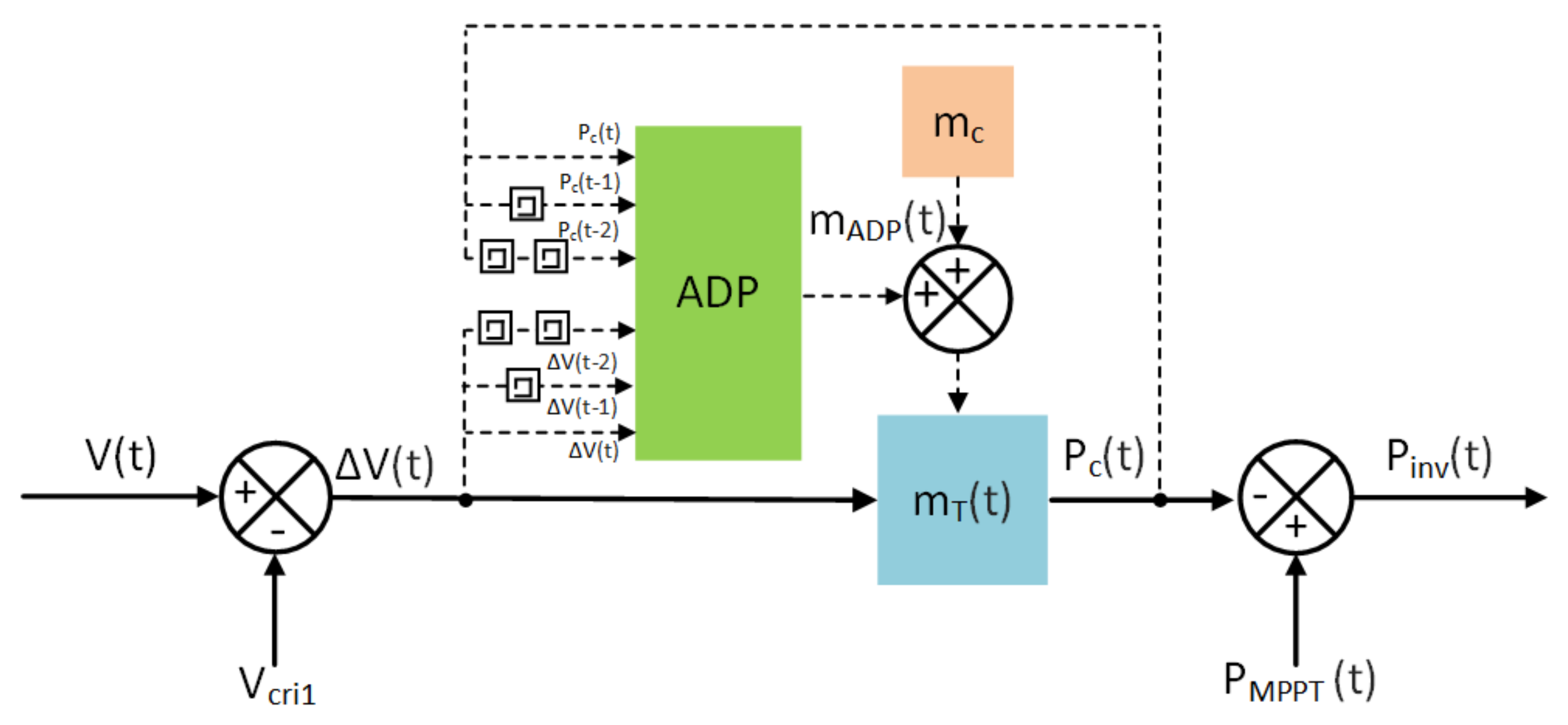
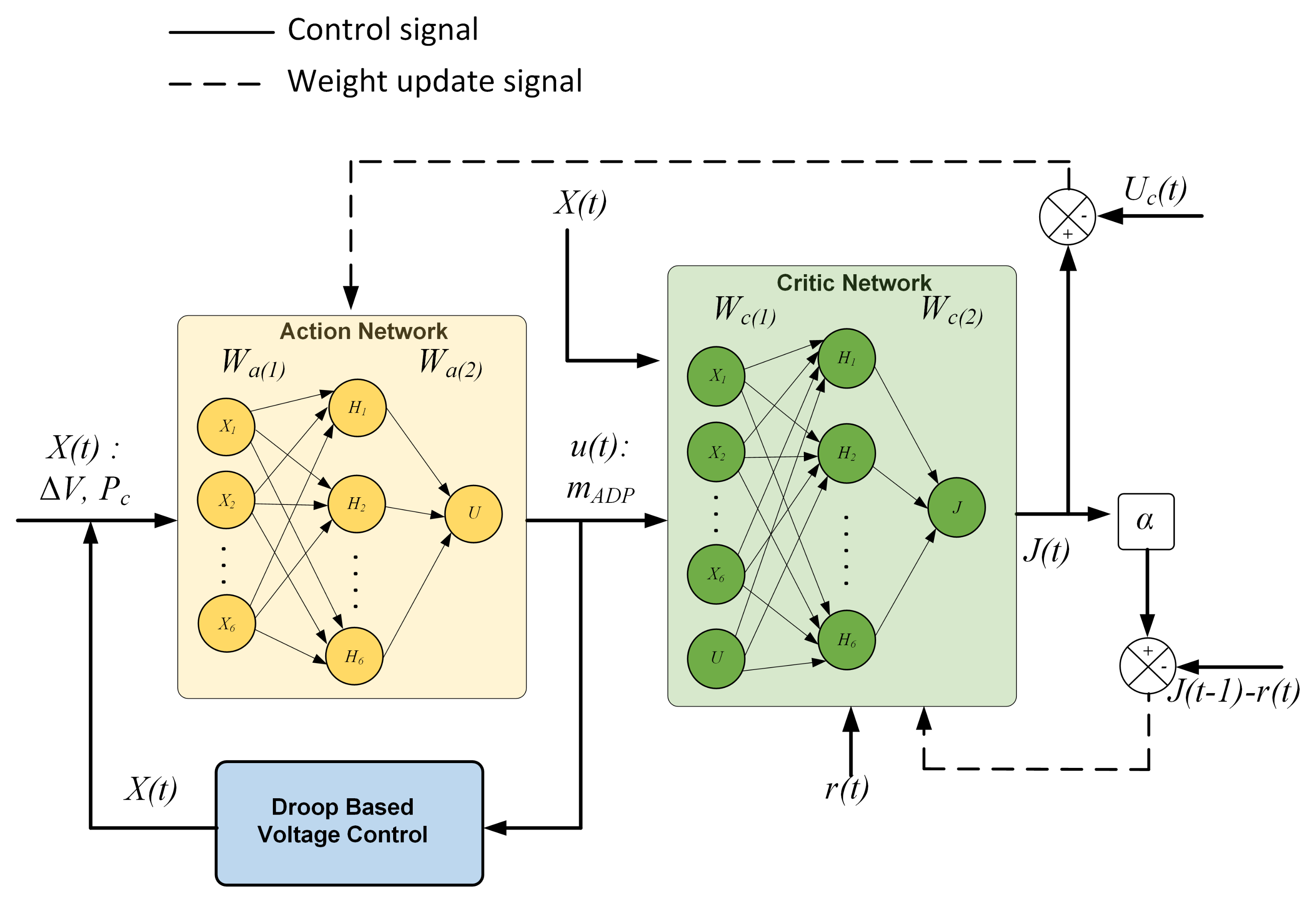
2.2. Proposed Adaptive Droop Control Design
3. Power Curtailment in LV Distribution Network
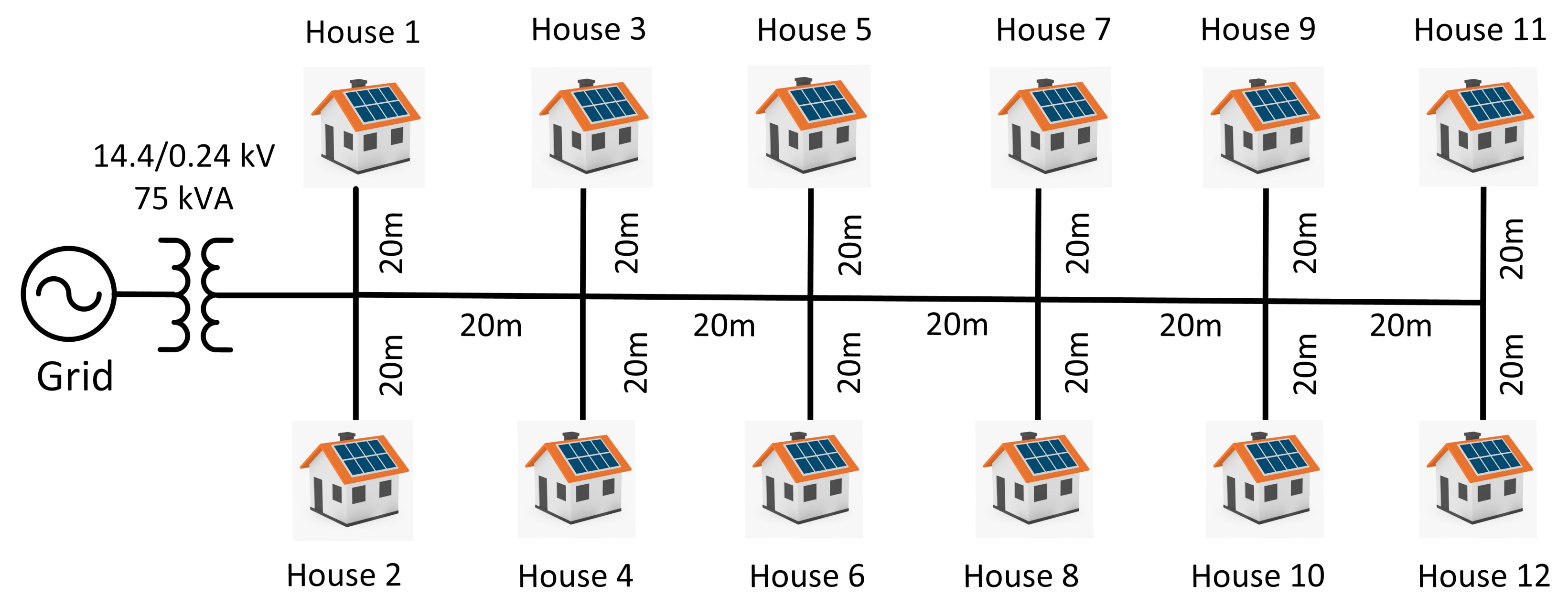
3.1. System Benchmark
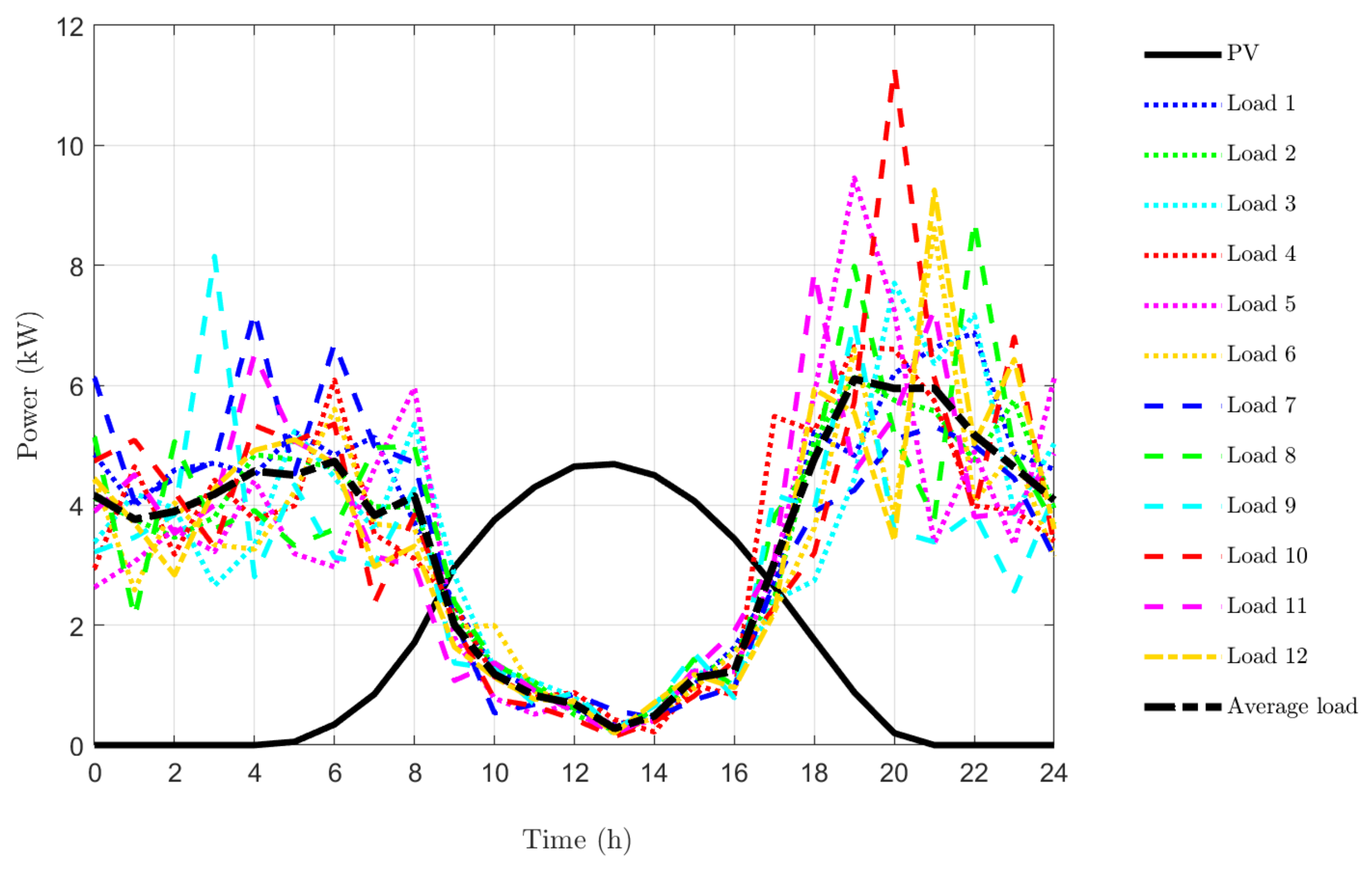
3.2. Solar Irradiance and Load Profile
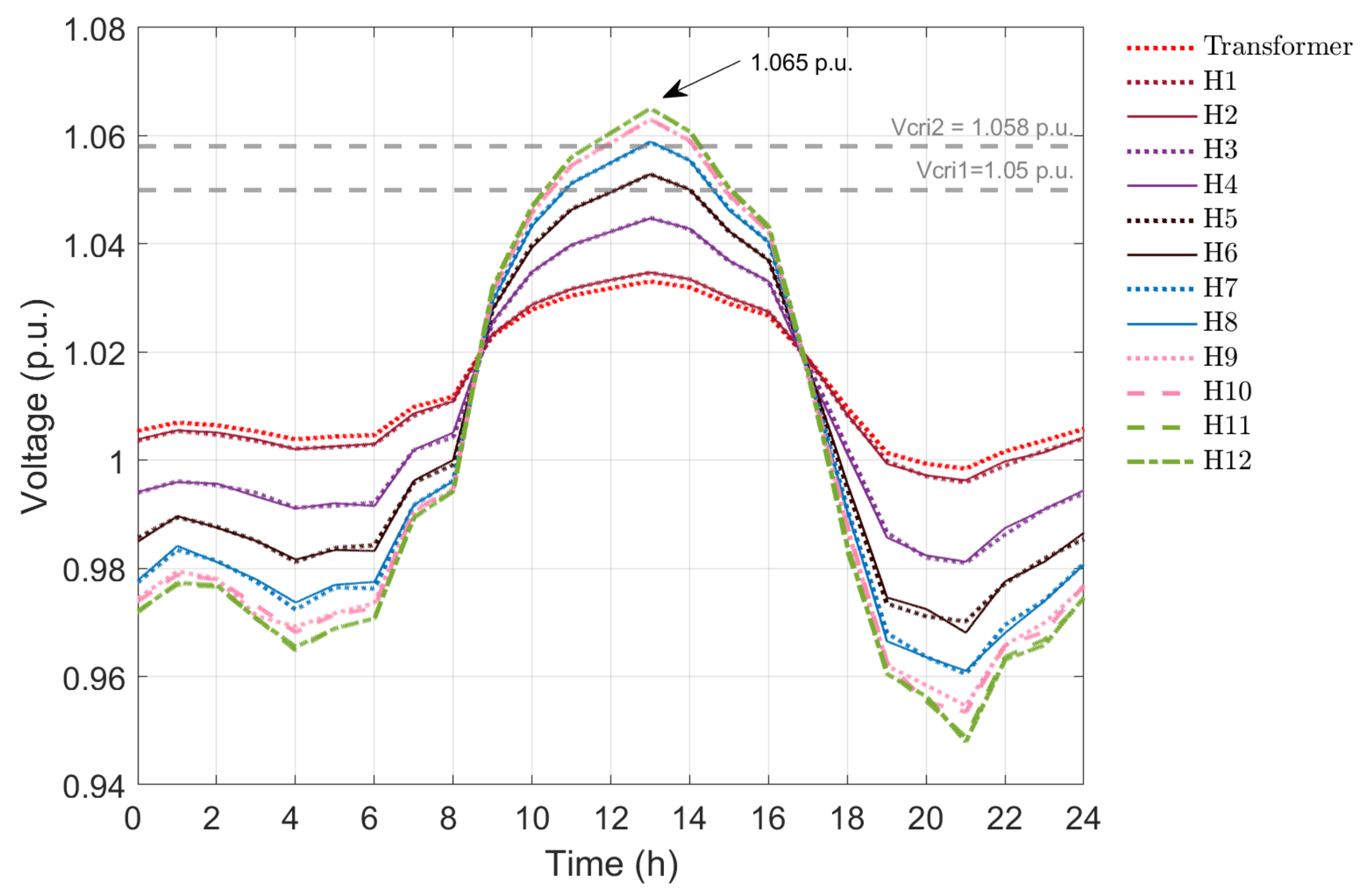
3.3. Base Case
4. Results
4.1. Different Droop Functions in Active Power Curtailment Method
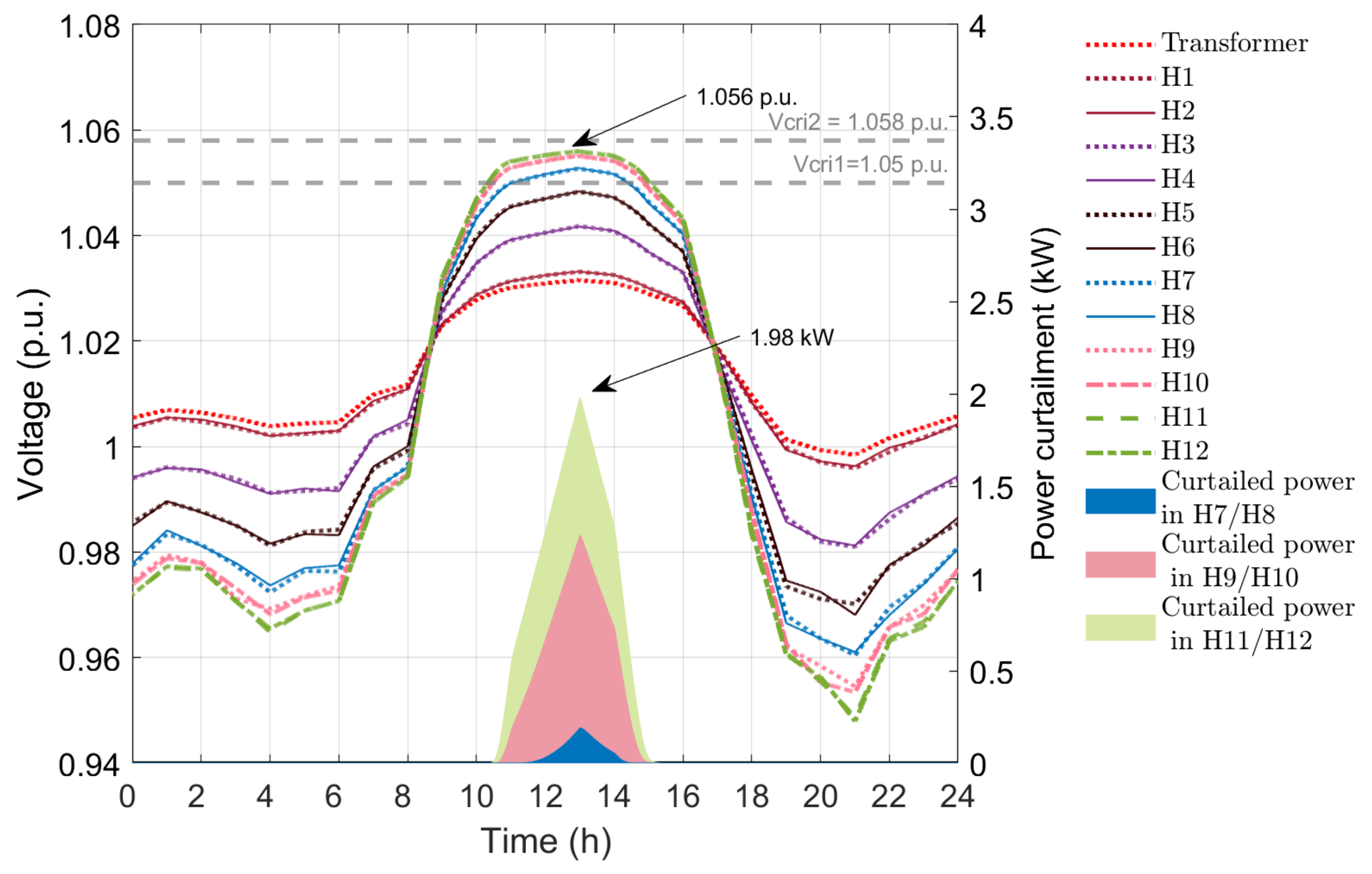
4.1.1. Linear Droop
4.1.2. Quadratic Droop
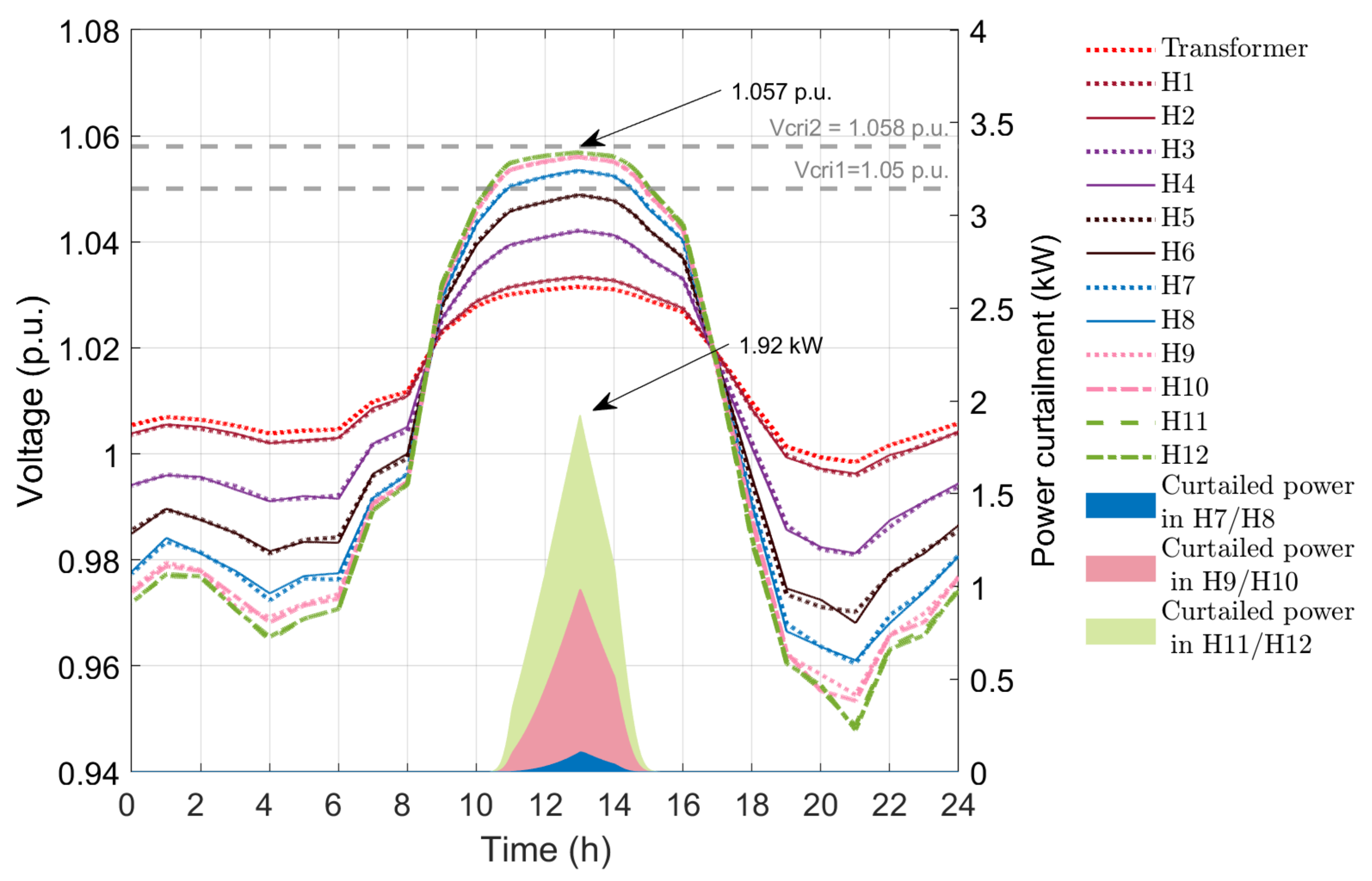
4.1.3. Exponential Droop
4.1.4. Discussion
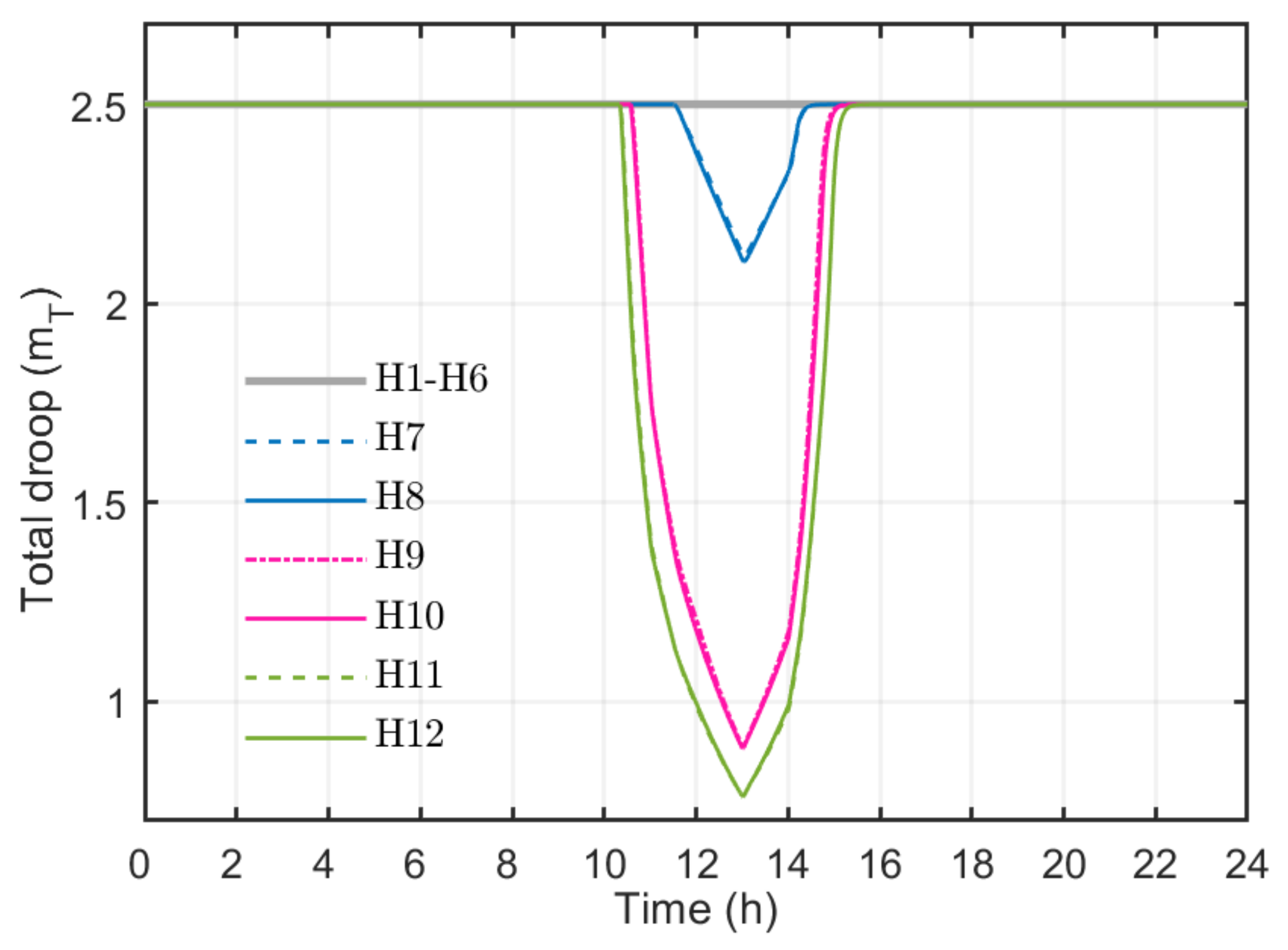
4.2. Proposed Supplementary Adaptive Droop Controller
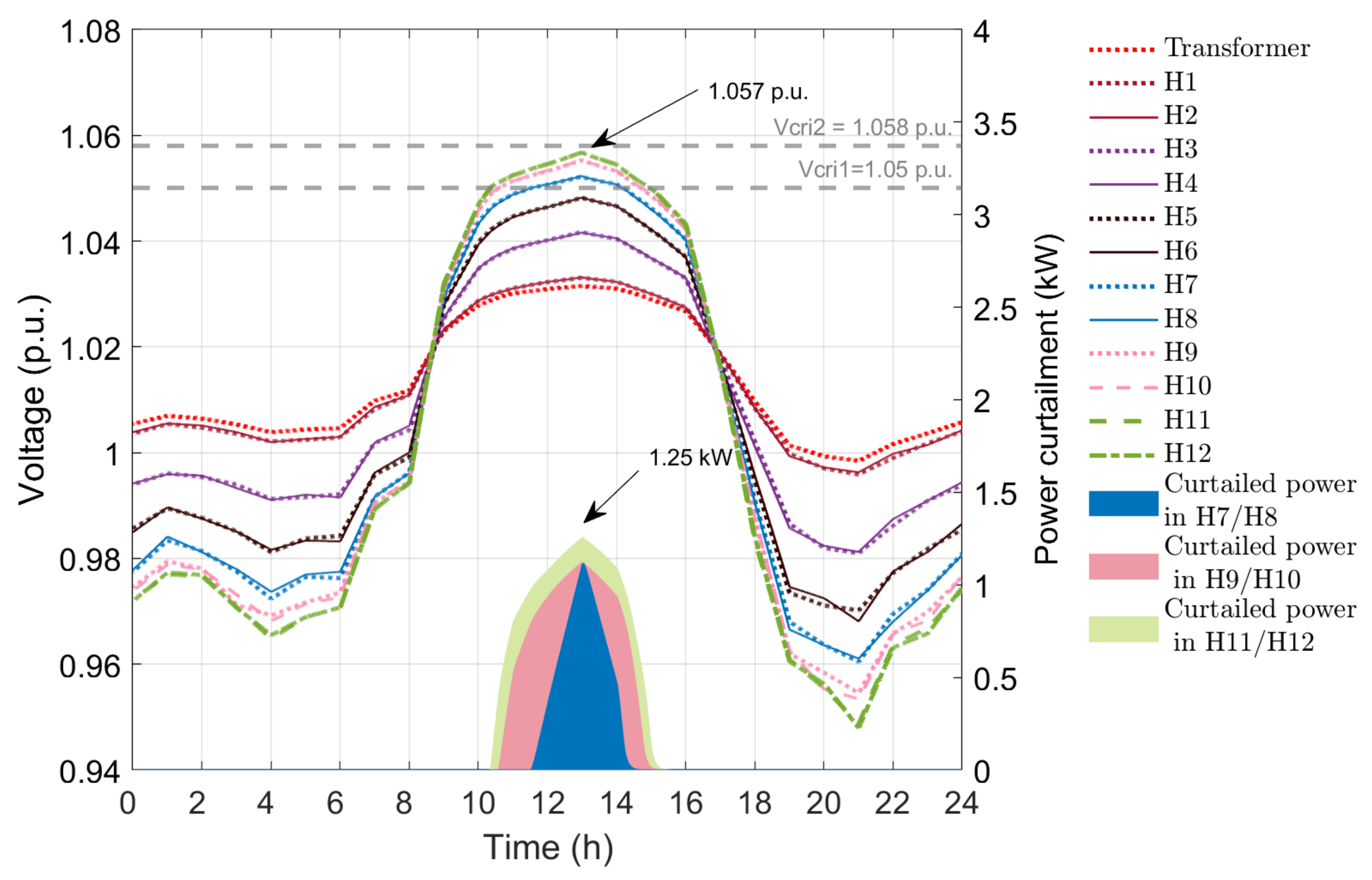
4.2.1. Linear Droop Using ADP
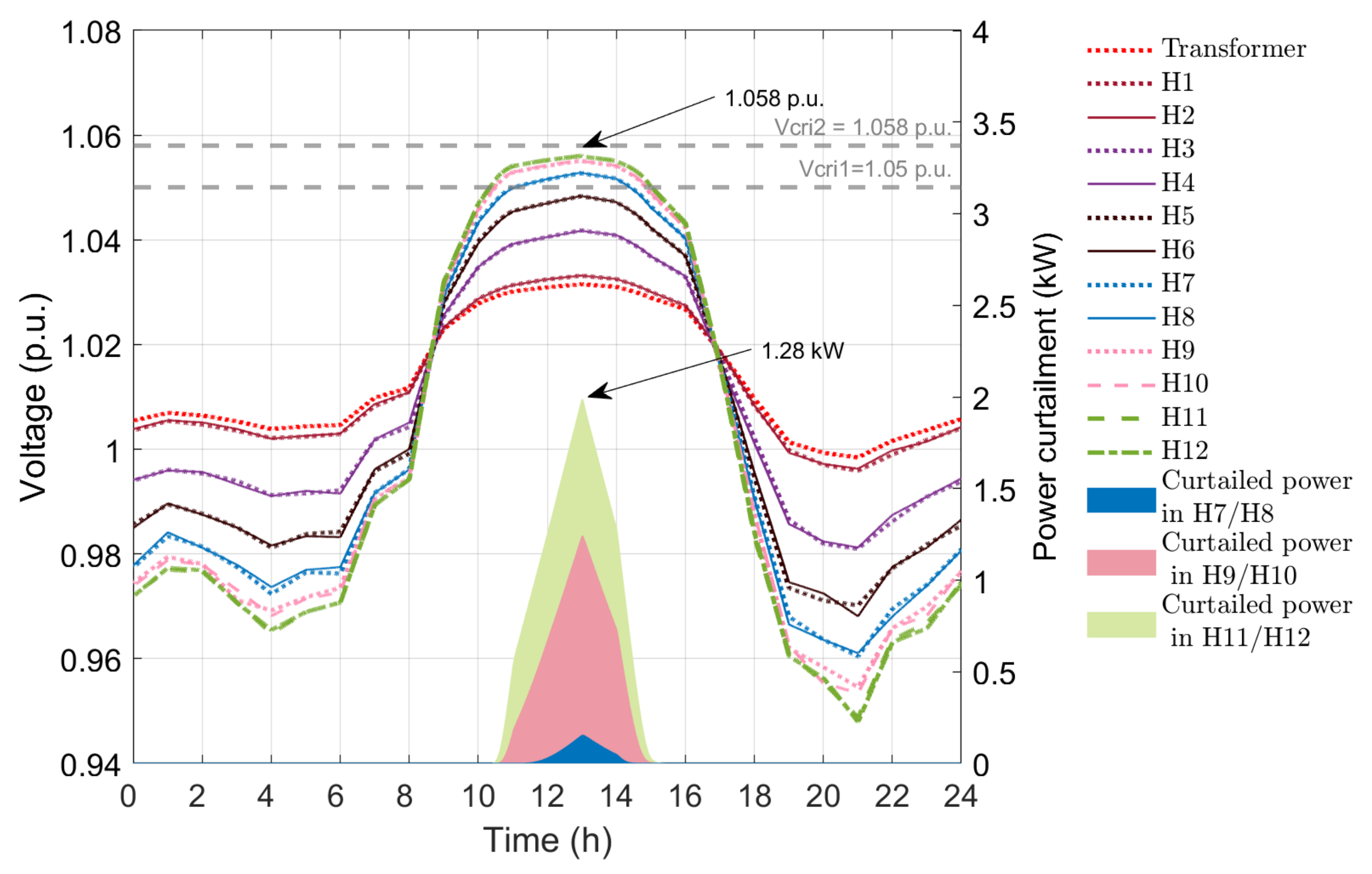
4.2.2. Quadratic Droop with ADP
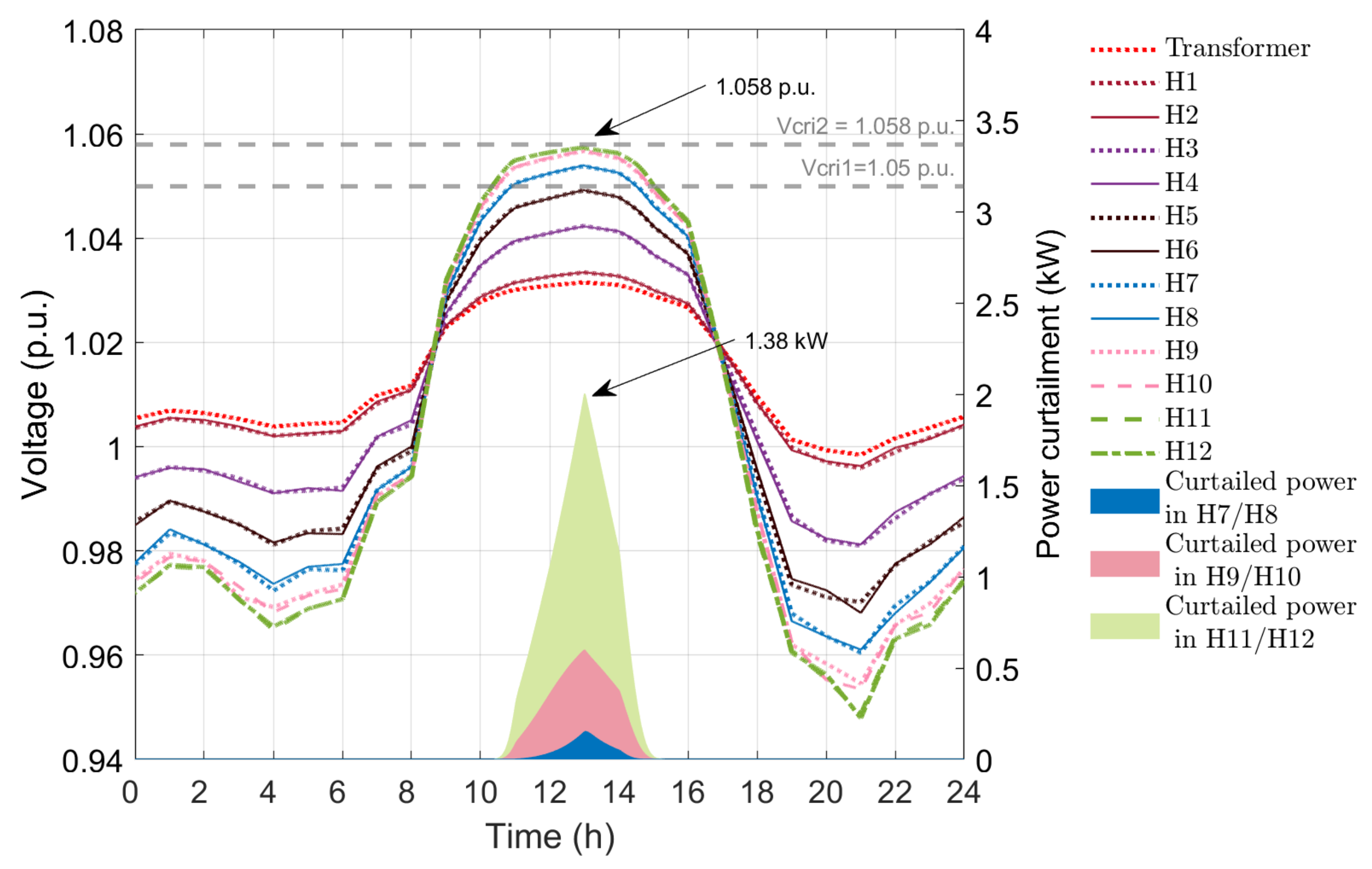
4.2.3. Exponential Droop with ADP
5. Comparisons of Performance
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| APC | Active Power Curtailment |
| ADP | Adaptive Dynamic Programming |
| ANSI | American National Standards Institute |
| ESS | Energy Storage System |
| LV | Low Voltage |
| POC | Point of Connection |
| PV | Photovoltaic |
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Transformer Parameter | Value (p.u.) |
|---|---|
| Primary winding resistance | 0.006 |
| Primary winding leakage inductance | 0.020 |
| Secondary winding resistance | 0.012 |
| Secondary winding leakage inductance | 0.025 |
| Magnetizing resistance | 500 |
| Magnetizing inductance | 500 |
| Line Parameter | Drop Line | Pole-Pole Line |
|---|---|---|
| Resistance (/km) | 0.549 | 0.346 |
| Inductance (mH/km) | 0.230 | 0.240 |
| Capacitance (F/km) | 0.055 | 0.075 |
References
- Zubo, R.; Mokryani, G.; Rajamani, H.S.; Aghaei, J.; Niknam, T.; Pillai, P. Operation and planning of distribution networks with integration of renewable distributed generators considering uncertainties: A review. Renew. Sustain. Energy Rev. 2017, 72, 1177–1198. [Google Scholar] [CrossRef] [Green Version]
- Tonkoski, R.; Turcotte, D.; EL-Fouly, T.H.M. Impact of High PV Penetration on Voltage Profiles in Residential Neighborhoods. IEEE Trans. Sustain. Energy 2012, 3, 518–527. [Google Scholar] [CrossRef]
- Dugan, R.C.; McGranaghan, M.F.; Beaty, H.W. Electrical Power Systems Quality; McGraw-Hill: New York, NY, USA, 1996. [Google Scholar]
- National Electrical Manufacturers Association. American National Standard for Electric Power Systems and Equipment–Voltage Ratings (60 Hertz); ANSI Standard C84.1; NEMA: Arlington, VA, USA, 2016. [Google Scholar]
- Poudel, B. Overvoltage Prevention in Low Voltage Rural Distribution Network with High Penetration of Wind Energy. Master’s Thesis, Department of Electrical Engineering and Computer Science, South Dakota State University, Brookings, SD, USA, 2014. [Google Scholar]
- IEEE. IEEE Standard for Interconnection and Interoperability of Distributed Energy Resources with Associated Electric Power Systems Interfaces. In IEEE Std 1547-2018 (Revision of IEEE Std 1547-2003); IEEE: Piscataway, NJ, USA, 2018; pp. 1–138. [Google Scholar]
- Kabiri, R.; Holmes, D.G.; McGrath, B.P.; Meegahapola, L.G. LV Grid Voltage Regulation Using Transformer Electronic Tap Changing, With PV Inverter Reactive Power Injection. IEEE J. Emerg. Sel. Top. Power Electron. 2015, 3, 1182–1192. [Google Scholar] [CrossRef]
- Luthander, R.; Lingfors, D.; Widén, J. Large-scale integration of photovoltaic power in a distribution grid using power curtailment and energy storage. Sol. Energy 2017, 155, 1319–1325. [Google Scholar] [CrossRef]
- Nousdilis, A.I.; Kryonidis, G.C.; Kontis, E.O.; Christoforidis, G.C.; Papagiannis, G.K. An Exponential Droop Control Strategy for Distributed Energy Storage Systems Integrated with Photovoltaics. IEEE Trans. Power Syst. 2020, 36, 3317–3328. [Google Scholar] [CrossRef]
- Jannesar, M.R.; Sedighi, A.; Savaghebi, M.; Guerrero, J.M. Optimal placement, sizing, and daily charge/discharge of battery energy storage in low voltage distribution network with high photovoltaic penetration. Appl. Energy 2018, 226, 957–966. [Google Scholar] [CrossRef] [Green Version]
- Ghasemi, M.A.; Parniani, M. Prevention of distribution network overvoltage by adaptive droop-based active and reactive power control of PV systems. Electric Power Syst. Res. 2016, 133, 313–327. [Google Scholar] [CrossRef]
- Juamperez, M.; Yang, G.; Kjær, S.B. Voltage regulation in LV grids by coordinated volt-var control strategies. J. Mod. Power Syst. Clean Energy 2014, 2, 319–328. [Google Scholar] [CrossRef] [Green Version]
- Mai, T.T.; Haque, A.N.M.; Vergara, P.P.; Nguyen, P.H.; Pemen, G. Adaptive coordination of sequential droop control for PV inverters to mitigate voltage rise in PV-Rich LV distribution networks. Electr. Power Syst. Res. 2021, 192, 106931. [Google Scholar] [CrossRef]
- Shi, Q.; Feng, W.; Zhang, Q.; Wang, X.; Li, F. Overvoltage Mitigation through Volt-VAR Control of Distributed PV Systems. In Proceedings of the 2020 IEEE/PES Transmission and Distribution Conference and Exposition (T&D), Chicago, IL, USA, 12–15 October 2020; pp. 1–5. [Google Scholar]
- Almeida, D.; Pasupuleti, J.; Ekanayake, J.; Karunarathne, E. Mitigation of overvoltage due to high penetration of solar photovoltaics using smart inverters volt/var control. Indones. J. Electr. Eng. Comput. Sci. 2020, 19, 1259–1266. [Google Scholar] [CrossRef]
- Safayet, A.; Fajri, P.; Husain, I. Reactive Power Management for Overvoltage Prevention at High PV Penetration in a Low-Voltage Distribution System. IEEE Trans. Ind. Appl. 2017, 53, 5786–5794. [Google Scholar] [CrossRef]
- Olivier, F.; Aristidou, P.; Ernst, D.; Cutsem, T.V. Active Management of Low-Voltage Networks for Mitigating Overvoltages Due to Photovoltaic Units. IEEE Trans. Smart Grid 2016, 7, 926–936. [Google Scholar] [CrossRef] [Green Version]
- Ghosh, S.; Rahman, S.; Pipattanasomporn, M. Distribution Voltage Regulation Through Active Power Curtailment With PV Inverters and Solar Generation Forecasts. IEEE Trans. Sustain. Energy 2017, 8, 13–22. [Google Scholar] [CrossRef]
- Mahat, R.; Duwadi, K.; dos Reis, F.B.; Fourney, R.; Tonkoski, R.; Hansen, T.M. Techno-Economic Analysis of PV Inverter Controllers for Preventing Overvoltage in LV Grids. In Proceedings of the 2020 International Symposium on Power Electronics, Electrical Drives, Automation and Motion (SPEEDAM), Sorrento, Italy, 24–26 June 2020; pp. 502–507. [Google Scholar]
- Duwadi, K.; Foutney, R.; Tonkoski, R.; Hansen, T.M. Sustainability Metrics for Inverter-based Voltage Regulation Methods in PV-rich Low Voltage Grids. In Proceedings of the 2019 IEEE International Conference on Electro Information Technology (EIT), Brookings, SD, USA, 20–22 May 2019; pp. 441–446. [Google Scholar]
- Tonkoski, R.; Lopes, L.A.C.; El-Fouly, T.H.M. Coordinated Active Power Curtailment of Grid Connected PV Inverters for Overvoltage Prevention. IEEE Trans. Sustain. Energy 2011, 2, 139–147. [Google Scholar] [CrossRef]
- Chalise, S.; Atia, H.R.; Poudel, B.; Tonkoski, R. Impact of Active Power Curtailment of Wind Turbines Connected to Residential Feeders for Overvoltage Prevention. IEEE Trans. Sustain. Energy 2016, 7, 471–479. [Google Scholar] [CrossRef]
- Wang, Y.; Zhang, P.; Li, W.; Xiao, W.; Abdollahi, A. Online Overvoltage Prevention Control of Photovoltaic Generators in Microgrids. IEEE Trans. Smart Grid 2012, 3, 2071–2078. [Google Scholar] [CrossRef]
- Alyami, S.; Wang, Y.; Wang, C.; Zhao, J.; Zhao, B. Adaptive Real Power Capping Method for Fair Overvoltage Regulation of Distribution Networks With High Penetration of PV Systems. IEEE Trans. Smart Grid 2014, 5, 2729–2738. [Google Scholar] [CrossRef]
- Sun, H.; Guo, Q.; Qi, J.; Ajjarapu, V.; Bravo, R.; Chow, J.; Li, Z.; Moghe, R.; Nasr-Azadani, E.; Tamrakar, U.; et al. Review of Challenges and Research Opportunities for Voltage Control in Smart Grids. IEEE Trans. Power Syst. 2019, 34, 2790–2801. [Google Scholar] [CrossRef] [Green Version]
- Singhal, A.; Ajjarapu, V.; Fuller, J.; Hansen, J. Real-time local volt/var control under external disturbances with high PV penetration. IEEE Trans. Smart Grid 2018, 10, 3849–3859. [Google Scholar] [CrossRef] [Green Version]
- Si, J.; Wang, Y.T. Online learning control by association and reinforcement. IEEE Trans. Neural Netw. 2001, 12, 264–276. [Google Scholar] [CrossRef]
- Shrestha, D.; Tamrakar, U.; Malla, N.; Ni, Z.; Tonkoski, R. Reduction of energy consumption of virtual synchronous machine using supplementary adaptive dynamic programming. In Proceedings of the 2016 IEEE International Conference on Electro Information Technology (EIT), Grand Forks, ND, USA, 19–21 May 2016; pp. 0690–0694. [Google Scholar]
- Malla, N.; Shrestha, D.; Ni, Z.; Tonkoski, R. Supplementary control for virtual synchronous machine based on adaptive dynamic programming. In Proceedings of the 2016 IEEE Congress on Evolutionary Computation (CEC), Vancouver, BC, Canada, 24–29 July 2016; pp. 1998–2005. [Google Scholar]
- Guo, W.; Liu, F.; Si, J.; He, D.; Harley, R.; Mei, S. Online Supplementary ADP Learning Controller Design and Application to Power System Frequency Control With Large-Scale Wind Energy Integration. IEEE Trans. Neural Netw. Learn. Syst. 2016, 27, 1748–1761. [Google Scholar] [CrossRef]
- Tang, Y.; He, H.; Ni, Z.; Wen, J.; Sui, X. Reactive power control of grid-connected wind farm based on adaptive dynamic programming. Neurocomputing 2014, 125, 125–133. [Google Scholar] [CrossRef]
- Ni, Z.; He, H.; Wen, J. Adaptive learning in Tracking Control Based on the Dual Critic Network Design. IEEE Trans. Neural Netw. Learn. Syst. 2013, 24, 913–928. [Google Scholar]
- Malla, N.; Tamrakar, U.; Shrestha, D.; Ni, Z.; Tonkoski, R. Online Learning Control for Harmonics Reduction based on Current Controlled Voltage Source Power Inverters. IEEE/CCA J. Autom. Sin. 2017, 4, 447–457. [Google Scholar] [CrossRef]
- Maharjan, M.; Tamrakar, U.; Malla, N.; dos Reis, F.B.; Ni, Z.; Hansen, T.M.; Tonkoski, R. Adaptive droop-based active power curtailment method for overvoltage prevention in low voltage distribution network. In Proceedings of the 2017 IEEE International Conference on Electro Information Technology (EIT), Lincoln, NE, USA, 14–17 May 2017; pp. 1–6. [Google Scholar]
- Maharjan, M. Voltage Regulation of Low Voltage Distribution Networks; South Dakota State University: Brookings, SD, USA, 2017. [Google Scholar]
- Tonkoski, R.; Lopes, L.A.C. Voltage Regulation in Radial Distribution Feeders with High Penetration of Photovoltaic. In Proceedings of the 2008 IEEE Energy 2030 Conference, Atlanta, GA, USA, 17–18 November 2008; p. 7. [Google Scholar]
- MATLAB Matlab User’s Guide; The Mathworks Inc.: Natick, MA, USA, 2015.
- Atia, H.R.; Shakya, A.; Tandukar, P.; Tamrakar, U.; Hansen, T.M.; Tonkoski, R. Efficiency analysis of AC coupled and DC coupled microgrids considering load profile variations. In Proceedings of the 2016 IEEE International Conference on Electro Information Technology (EIT), Grand Forks, ND, USA, 19–21 May 2016; pp. 0695–0699. [Google Scholar]
- dos Reis, F.B.; Tonkoski, R.; Hansen, T.M. Synthetic residential load models for smart city energy management simulations. IET Smart Grid 2020, 3, 342–354. [Google Scholar] [CrossRef]
- Hansen, T.M.; Chong, E.K.; Suryanarayanan, S.; Maciejewski, A.A.; Siegel, H.J. A partially observable markov decision process approach to residential home energy management. IEEE Trans. Smart Grid 2018, 9, 1271–1281. [Google Scholar] [CrossRef]














| Droop Function | Maximum Power Curtailment (kW) | Total Energy Curtailed (kWh) | ||
|---|---|---|---|---|
| H7/H8 | H9/H10 | H11/H12 | ||
| Linear | 0.44 | 1.66 | 2.17 | 22.72 |
| Quadratic | 0.17 | 1.20 | 1.95 | 15.27 |
| Exponential | 0.11 | 0.95 | 1.92 | 12.40 |
| Linear Droop | H1–H6 | H7 | H8 | H9 | H10 | H11 | H12 | Total (kWh) |
|---|---|---|---|---|---|---|---|---|
| APC | 0 | 0.48 | 0.54 | 4.18 | 4.36 | 6.59 | 6.59 | 22.72 |
| APC with ADP | 0 | 1.65 | 1.71 | 3.37 | 3.44 | 4.29 | 4.29 | 18.77 |
| Quadratic Droop | H1–H6 | H7 | H8 | H9 | H10 | H11 | H12 | Total (kWh) |
|---|---|---|---|---|---|---|---|---|
| APC | 0 | 0.22 | 0.23 | 2.49 | 2.63 | 4.87 | 4.81 | 15.27 |
| APC with ADP | 0 | 0.51 | 0.53 | 2.34 | 2.46 | 3.57 | 3.54 | 12.98 |
| Exponential Droop | H1–H6 | H7 | H8 | H9 | H10 | H11 | H12 | Total (kWh) |
|---|---|---|---|---|---|---|---|---|
| APC | 0 | 0.15 | 0.16 | 1.79 | 1.90 | 4.24 | 4.16 | 12.40 |
| APC with ADP | 0 | 0.24 | 0.26 | 1.81 | 1.92 | 3.33 | 3.27 | 10.86 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Maharjan, M.; Tamrakar, U.; Ni, Z.; Bhattarai, B.; Tonkoski, R. Overvoltage Prevention and Curtailment Reduction Using Adaptive Droop-Based Supplementary Control in Smart Inverters. Appl. Sci. 2021, 11, 7900. https://doi.org/10.3390/app11177900
Maharjan M, Tamrakar U, Ni Z, Bhattarai B, Tonkoski R. Overvoltage Prevention and Curtailment Reduction Using Adaptive Droop-Based Supplementary Control in Smart Inverters. Applied Sciences. 2021; 11(17):7900. https://doi.org/10.3390/app11177900
Chicago/Turabian StyleMaharjan, Manisha, Ujjwol Tamrakar, Zhen Ni, Bishnu Bhattarai, and Reinaldo Tonkoski. 2021. "Overvoltage Prevention and Curtailment Reduction Using Adaptive Droop-Based Supplementary Control in Smart Inverters" Applied Sciences 11, no. 17: 7900. https://doi.org/10.3390/app11177900