1. Introduction
Modern real-time embedded systems are demanding in terms of computing power and programmable performance; thus, the number of processors used in these applications is increasing [
1,
2,
3]. System-on-Chip (SoC) designs have multiple processing elements (PEs) on the same die for the sake of meeting the exponential growth in the recent processing requirements of embedded system applications. These processing components usually share the system memory and peripherals while execution, thus requiring synchronization to ensure system integrity [
4]. Tasks can be distributed to each processor in multiprocessor systems to minimize the overall execution time, since the processors are tightly coupled [
5]. Multiple processors make it easier to give quick responses and satisfy the requirements of real-time and functional complexity for complex real-time systems [
6]. The field of real-time embedded systems encompasses a wide variety of systems, from basic control loops on microcontrollers to complex integrated distributed systems. These systems are used in a variety of applications such as energy management [
7], autonomous vehicles [
8,
9], medical systems [
10], avionics [
11] and consumer electronics [
12]. Many of the latest multiprocessor systems are heterogeneous, such as a multiple digital signal processors (DSPs), advanced RISC machines (ARMs), general-purpose processors (GPPs) or microcontrollers, field-programmable gate arrays (FPGAs), application-specific integrated circuits (ASICs), etc. In general-purpose computing, heterogeneous multiprocessors are less common. The combinations of heterogeneous multiprocessors pose significant challenges when compared with the symmetric multiprocessor world [
13]. Accordingly, acquiring software from many types of processors and making them operate together becomes extremely challenging. The hardware design features of heterogeneous embedded multiprocessor systems have received a lot of attention in the last few years. Meanwhile, the challenge of creating efficient software for this kind of platform still has not been fully addressed yet [
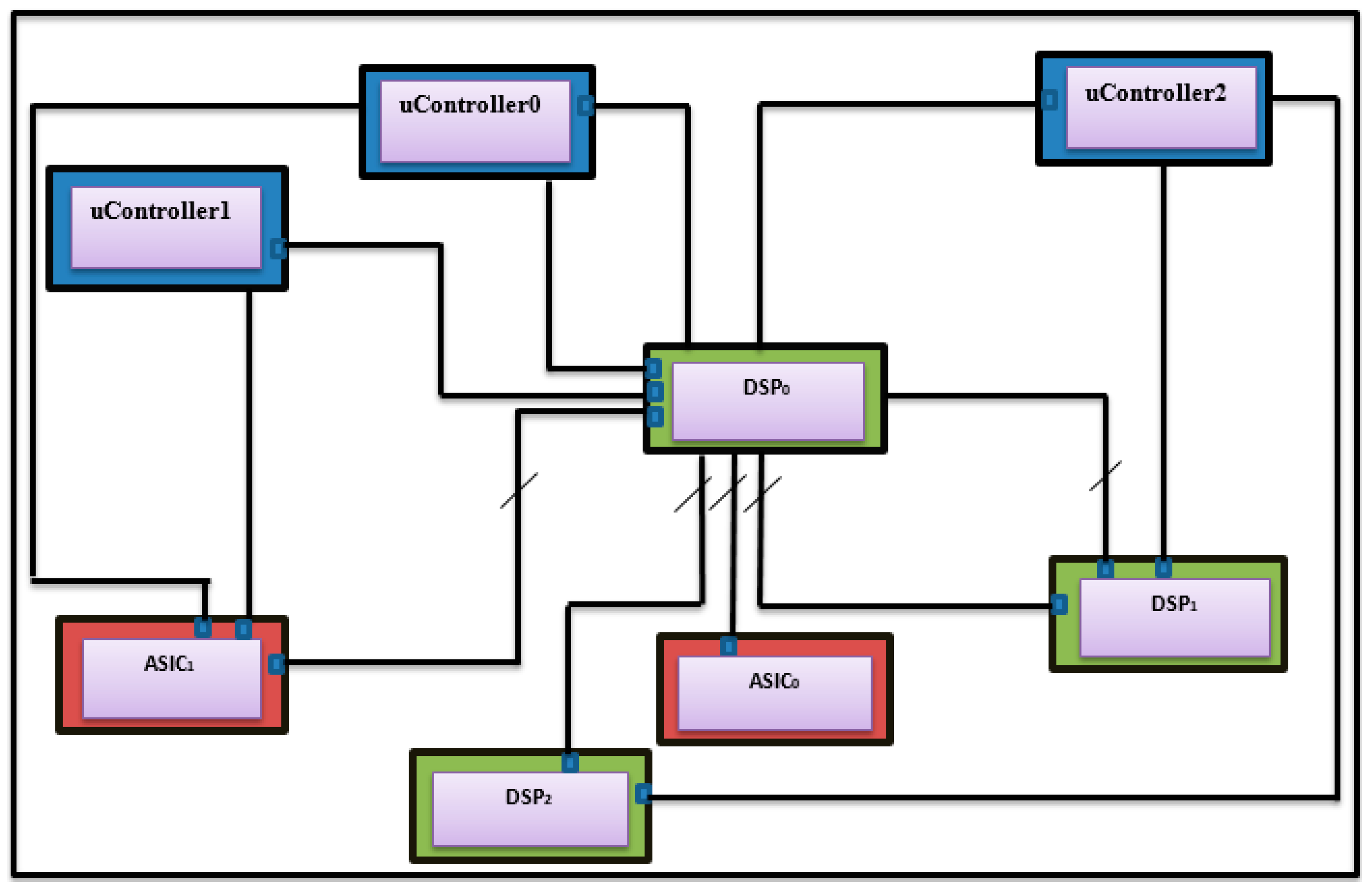
14]. With several PEs, a real-time embedded system connected via different physical interfaces (synchronous and asynchronous) using interprocessor communication is shown in
Figure 1. Real-time interprocessor communications and time synchronization are important in ensuring good performance for critical applications in multiprocessor-based embedded systems [
15]. Improving the communication efficacy among the processors is one of the key challenges of an embedded system implementing real-time processing applications. Normally, the main issues of an embedded system implementing a real- time processing application are the interprocessor communications and synchronization. Since a single processor is insufficient for real-time processing, therefore, a way is required for the processors to synchronize their communication. Processors must synchronize themselves when they collaborate with each other [
16]. Synchronization on a multiprocessor is expensive due to the hardware levels at which synchronization and communication must happen [
17]. The situation becomes even worse when the CPU used to interact with other processors or other hardware components [
18] is interrupted, which is common in today’s multiprocessor systems. Moreover, the resulting gap in the bandwidth of the interface among the memory and processors has become a critical hurdle for total system performance as the data rate demands have increased [
19]. The demand for increased bandwidth interfaces in computing devices has led to the adoption of high-speed interfaces identical to those used in communication devices [
20]. In today’s computing industry, featuring communication systems as well as data centers [
21], high-speed serial interfaces (HSSI) are prevalent [
22]. Therefore, the demand for availability, reliability, and high performance in real-time embedded systems has resulted in more complex computing systems. Developing systems of this complexity necessitates the use of sophisticated validation and verification approaches [
23]. The development time is reduced, and difficulties are blocked in the realm of real-time embedded systems if the errors are detected and fixed earlier in the product cycle. It is significantly important to understand and examine the behavior in all the possible situations, thus better achieving the overall system quality for complex systems [
24].
As the complication of real-time and embedded systems grows, the demand for developing the methodologies and tools that give productive ways for the efficient development of relevant embedded software is growing as well. Developers often devote a considerable portion of their time to testing and correcting errors [
25], which is aided by advanced software testing and debugging tools [
26]. However, testing such programs is typically more difficult than testing sequential applications, and it is made much more challenging by the heterogeneous parallelism in a multiprocessor system on chip (MPSoC). Simultaneous environments introduce new types of errors in the error taxonomy that do not exist in sequential programs, which is one reason for the increased complexity [
27]. Furthermore, due to their complexity, debugging and testing these multiprocessor systems during the design phase is particularly difficult and time-consuming, as the majority of the complexities are found in debugging real-time interprocessor communication, which is synchronous in terms of accuracy and timing. One of the biggest challenges in the creation of embedded system projects, according to [
28], is testing and debugging [
29]. Several tools have been proposed for the development of embedded software, with the validation activity accounting for more than 60% of the total development effort [
30].
Despite the availability of a wide range of testing and debugging techniques, there are still weaknesses in the testing and debugging process that may be addressed, most notably in comprise between time, cost, and test efficiency. As embedded systems have become more complex, specialized testing methodologies have become more recognized than general testing frameworks for embedded systems. In addition to errors in the program logic, timing and accuracy problems in interprocessor communication are possible. Interchanging among several interfaces might incur significant time delays through transitioning or processing a different interface when the processors employ a real-time operating system due to time constraints. Furthermore, emulating high-speed interfaces is difficult and uncontrolled in order to mimic real-time events. The developers have tested all the functionality of the PEs separately, but still, the multiprocessor-based real-time embedded system fails due to the high-speed serial (asynchronous as well as synchronous) interfaces. High-speed interfaces transport a large amount of data across multi PEs during interprocessor communication. Finding synchronization and timing errors is extremely difficult without observing the trace of System under Test’s (SuT’s) execution due to the high-speed interfaces. So, there is a lot of possibility for research in this field to look at ways to verify interprocessor communications in real-time settings.
The goal of this work tackles the complicated problem of testing and debugging high-speed serial interfaces while an application is running, which requires real-time testing and debugging. A variety of factors, i.e., the computational complexity of executing different algorithms, the kind of operating system that runs on a real-time system, etc. affect interprocessor communications. The research was driven by the experience of building a multi-PEs based real-time embedded system in which the most challenging part of the implementation was the testing and debugging of high-speed serial interfaces with several apparent and concealed factors affecting interprocessor communication. When high-speed processing is essential in real-time embedded systems, certain kinds of issues arise in numerous fields, i.e., ultrasound systems [
31], automobile electronic control unit applications [
32], software-defined radios [
33], radar applications [
34], etc. As the demand for the high data transfer rises, testing and debugging high-speed interfaces become much more complex [
35]. Particularly, testing the application with high-speed serial interfaces is the focus in this work. The proposed knowledge base technique is created based on synchronization errors encountered on single as well as multiple interfaces when communication between multi PEs occurs in a real-time embedded system. When an interface error is received on the real-time embedded system, we compare it with the knowledge base. To localize the error, we also capture the data through the multiple emulators at run time. This allows us to identify where the synchronization error is and which interface is causing this error. The proposed technique rapidly addresses errors while also examining and diagnosing the behavior of multiple connected serial interfaces with complex internal architectures. The results show that our presented technique is effective in discovering and fixing issues that would otherwise be difficult to find and fix.
The research contribution is to design and develop a knowledge base that aids in the testing of multiple high-speed serial interfaces in multi-processor-based real-time embedded systems, as well as to simulate, store and detect all possible synchronization-related errors that occur during PE communication.
The rest of the paper is structured as follows. The related work is discussed in
Section 2. The conceptual idea and the implementation of the approach are discussed in particular in
Section 3 and
Section 4, respectively. An experimental evaluation of our work is provided in
Section 5.
Section 6 and
Section 7 summarize and conclude this paper.
2. Related Work
Several techniques for testing and debugging high-speed serial interfaces have been explored in this section and are shown in
Table 1. It is becoming more difficult to develop fault-free electronic equipment as data rates and integration levels grow. As a result, post-fabrication validation currently consumes about 25% of the total design resources at Intel [
36]. In the target environment, real-time embedded system debugging and testing has traditionally become difficult and time-consuming due to the inherent absence of internal system visibility [
37]. Furthermore, as the need for increased bandwidth grows, high-speed serial interfaces (HSSI) are being pushed toward larger data rates [
38]. Post-silicon validation, testing, and debugging of HSSI has made it more crucial to maintain the design and device quality with the coinciding increase in the complexity of the design and decrease in the timing budget [
39]. It has also become a serious issue and has become much more difficult to address as a consequence of longer test times, jitter, noise, signal integrity issues, and the usage of expensive instruments [
40]. As the data rate grows for transferring data faster, it eventually becomes significant to test and verify these interfaces throughout the development [
41]. It is critical and typically takes the majority of the design time.
Testing and Debugging of High-Speed Interfaces
Various methods for testing as well as debugging embedded systems’ high-speed serial interfaces have been proposed by several studies. A solution to the issue of decreased General Purpose Input/Outputs (GPIO) pin availability during manufacturing tests and running complete structural content while embedded in a functioning system is to use the functional protocol of an existing HSIO port for testing proposed in [
42]. By exploiting the high-speed functional interfaces that are already present in a SoC, such as PCIe or USB, the approach effectively executes both scan tests and in-system tests. By delivering packetized test data to the DUT at speeds that are noticeably faster than those made possible using GPIOs, this technique shortens test times by utilizing the native protocol of these scaled high-speed interfaces. HSIO links validation uses the modified golden section direct search optimization approach published in [
43] for quick and accurate jitter tolerance (JTOL) testing. The algorithm performed admirably when compared to the USB3 Gen1, SATA, and PCIe standards. Using the suggested techniques, other standards based on the receiver JTOL test, including XAUI, can be effectively adapted using the proposed methods. The work in [
44] investigates and analyzes the causes of timing (jitter) noise in serial transmission lines. A complete method for estimating the frequency components of timing noise as well as simulating the behavior of timing noise sources is also presented. The focus of the research is on jitter reduction methods. The half-rate series-parallel pseudo random binary sequence (PRBS) generator in the proposed BIST system uses a specific pattern to self-synchronize the received data stream with the reference data at the bit error checker for HSSI. To test and validate the high-speed PCI-E interface for Opengear’s devices, the synchronous reconstruction approach is proposed in [
35]. To define the quality of communication interfaces, a Bit Error Rate Tester (BERT) technique is proposed in [
45]. The BER tester core in FPGAs and Special Additive White Gaussian Noise (AWGN) generating core used for BERT are introduced. It is more efficient to combine BERT and an AWGN on FPGAs in respect to volume, cost, and energy than current related speed stand-alone systems; it offers an advantage of significant speed over the software simulations. The spread spectrum, error-correcting codes, data recovery interfaces/native clock, and user-defined modulation are among the communication devices that can be tested and evaluated using the complete BERT technique. Two case studies are used to validate the proposed solution: an AWGN baseband transmission system is assessed by one of them, and a high-speed serial interface is evaluated by the other. BERT electronic test equipment is employed to ensure that the high-speed serial interface transceivers function properly. To enable bit error rate monitoring without the need for off-chip subsystems such as memory and the PRBS generator, a half-rate BIST system is presented in [
46].
The work in [
47] proposed a test and debug technique for the serial interface, i.e., JESD204B Rx PHY, allowing at-speed testing on 28 nm Silicon-On-Insulator (SOI) technology. Custom analog circuits are used for the primary BIST, while to debug BIST, conventional digital logic is used. The BIST circuitry is used to deliver a very low-cost testing mechanism with a 0.5% area overhead and a 2.5% current consumption overhead. To test the JESD Rx PHY manufacturing defects, a combination of ATPG patterns and BIST is used. The BIST focuses on at-speed transition defects as well as analog block defects in the 2.4 GHz digital domain. ATPG is implemented to overcome systematic jamming issues and defects in @60 MHz at-speed transitions. The second batch of serial pattern generators and data checkers is created on the digital boundaries to aid debugging. According to [
20], the data eye margin test has become a common design-for-test (DfT) based high–speed links test technique when used in conjunction with loopback configuration. The test methodologies and DfT circuitry for backing high-speed serial interfaces are summarized in this paper (e.g., SATA). This work also provides fundamental implementation descriptions and silicon experiences as well as manufacturing test techniques for devices that employ external loopback. In addition, they provided an overview of test pattern creation, acquisition, and control implementations. The work in [
48] explained how to test and classify HSIO interfaces using external measuring devices and ATE. The problems that the tester faced when working through high-speed devices were also mentioned. This work also included ATEs hardware testing-based solutions. The work in [
49] has been used to build a test harness intended for a DMA controller and high-speed synchronous serial interface. The suggested test harness is employed to stimulate the device under test’s various capacities as well as to assess its behavior. The test harness enables testers to analyze the behavior of peripherals integrated with the SoC. The work in [
50] demonstrated a subtle method for debugging, testing, and validating high-speed serial interfaces as well as conducting functional testing. With the external loopback approach, many of the present restrictions of ATE can be alleviated. Using a BERT for FPGA and novel jitter injection method, high-speed interfaces were assessed and tested without needing the DfT capabilities and ATE instruments; this approach also overcomes traditional ATE instrument limitations. Depending on the applications, the technique intends to use ATE instruments or conducts the testing of an external loopback except for an ATE. Electronic test equipment BERT is utilized to accelerate post-silicon validation.
According to the literature review, several studies have been conducted on the high-speed serial interfaces in multiprocessor-based embedded systems. However, the majority of these studies focus on functional testing and debugging; specialized electronic equipment for testing are employed by many of the studies or to test and debug high-speed serial interfaces through an external provider. Furthermore, there is currently a gap in the research on testing and debugging high-speed serial interfaces regarding synchronization-related issues during interprocessor communication. As a result, developing a knowledge base technique that identifies errors on single as well as multiple interfaces that can assist the developers in testing and debugging multiprocessor-based real-time embedded systems is the main objective of this study. No previous research has addressed the issues highlighted in this work to our highest knowledge.
Table 1.
A benchmark table was created to contrast our results with the literature. The table summarizes our research and highlights the contributions and limits of each study.
Table 1.
A benchmark table was created to contrast our results with the literature. The table summarizes our research and highlights the contributions and limits of each study.
| Sr No | Research Paper and Year | Contributions | Limitation |
|---|
| 1 | Pandey et al. (2022) [42] | Tested existing high-speed functional interfaces of a System on Chip (SoC), such as PCI-E or USB, using both scan and in-system testing. | Implementation uses a limited bandwidth for testing. |
| 2 | Wacher et al. (2021) [43] | Performed jitter tolerance testing for high-speed Input/Output (HSIO) links validation using the modified golden section direct search optimization approach. | External measuring device used. |
| 3 | Tsimpos (2020) [44] | Calculation of the jitter noise frequency components and the behavioral modeling of jitter noise sources in HSSI. | Focus on jitter tolerance testing of HSSI. |
| 4 | Gabauer (2019) [35] | Use synchronous reconstruction method implemented on an FPGA to test and validate the high-speed interface, i.e., PCI-E interface. | Test only PCI-E Interface. |
| 5 | Bodha et al. (2019) [46] | Half-rate built-in self-test (BIST) system for high-speed serial interface is used to enable bit error rate measurement. | Focus on manufacturing testing. |
| 6 | Piplani et al. (2017) [47] | To test and debug high-speed serial interface i.e., JESD204B Receiver Physical Layer (JESD204B Rx PHY) using BIST and Automatic Test Pattern Generator (ATPG) patterns. | Focus on manufacturing testing. |
| 7 | Moreira and Werkmann (2016) [48] | Use of automated test equipment (ATE) and external measuring devices to characterize and test high-speed I/O digital interfaces. | External measuring devices are used. |
| 8 | Arora and Jaliminche (2015) [49] | Proposed software test harness for direct memory access (DMA) controller) and high-speed synchronous serial interface. | Use test harness for identifying manufacturing faults. |
| 9 | Masood et al. (2022) | A knowledge-based technique is proposed that has been developed to aid in detecting and fixing synchronization-related errors on multiple high-speed serial interfaces in multi-PEs-based real-time embedded systems. The proposed technique helps to identify and fix the synchronization related errors that occur during interprocessor communication among multiple high-speed serial interfaces. |
3. Synchronization Errors
One of the most critical factors influencing the complexity and performance of the real-time embedded systems is synchronization [
2]. Several processing elements (PEs) are associated via various kinds of high-speed interfaces in an embedded system.
Testing and debugging these kinds of systems differ from testing and debugging non-real-time systems, making it a very challenging task. Furthermore, real-time application synchronization makes testing and debugging more complex. The implications of faults on synchronization must be addressed in critical real-time applications. Faults worsen the synchronization problem by generating worst-case scenarios such as message propagation delays and read errors.
Many circuit-level synchronization approaches have been developed, such as VLSI arrays or concurrent system models that use distributed clock lines or semaphores to provide the required synchrony. It can also occur at different levels, including logical clocks, communications, and computing processes. Preserving consistent distributed information, guaranteeing consistent scheduling, diagnostics, coordinating functional units, reconfiguration, and application-specific choices are all aspects of synchronization. The present literature contains a wide range of system models and synchronization approaches. Both software and hardware methods have been formulated to offer the various degrees of granularity required to coordinate system services [
51]. To develop new ways for detecting and locating synchronization errors in multi-PE embedded systems as well as improving interprocessor communication, embedded system testers and researchers are working consistently.
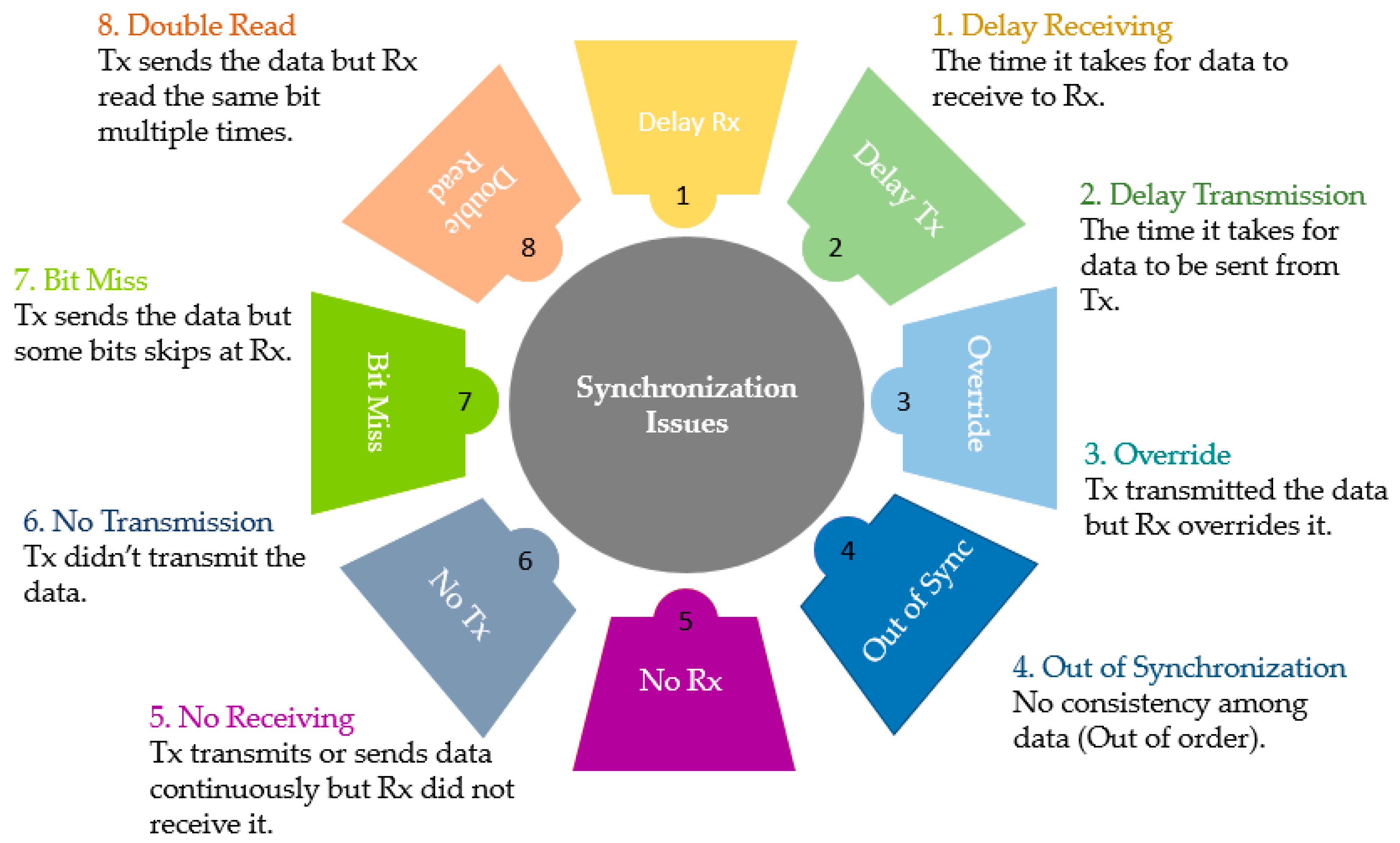
We noticed synchronization errors in embedded system real-time communication while making the embedded system, as illustrated in
Table 2 and further reported in [
52]. These are synchronization and timing errors rather than functional errors, and they are caused by high-speed synchronous serial interfaces.
Figure 2 depicts the synchronization errors that arise during interprocessor communication in detail.
4. Proposed Technique
We proposed a knowledge base technique that is utilized for testing high-speed serial interfaces in multiprocessor-based real-time embedded systems as well as finding and restraining synchronization-related issues in inter-processor communication. The proposed technique is catering to an embedded system having many PEs joined with multiple high-speed serial interfaces. The PEs have all been functionally tested and verified for correctness. Several synchronization issues occur when these PEs communicate with one another through these interfaces in multiprocessor-based real time embedded systems. These issues might occur due to inter-PEs communication rather than the functionality of a given PE. Designers cannot be accessible at all times to monitor and observe what is happening on these interfaces.
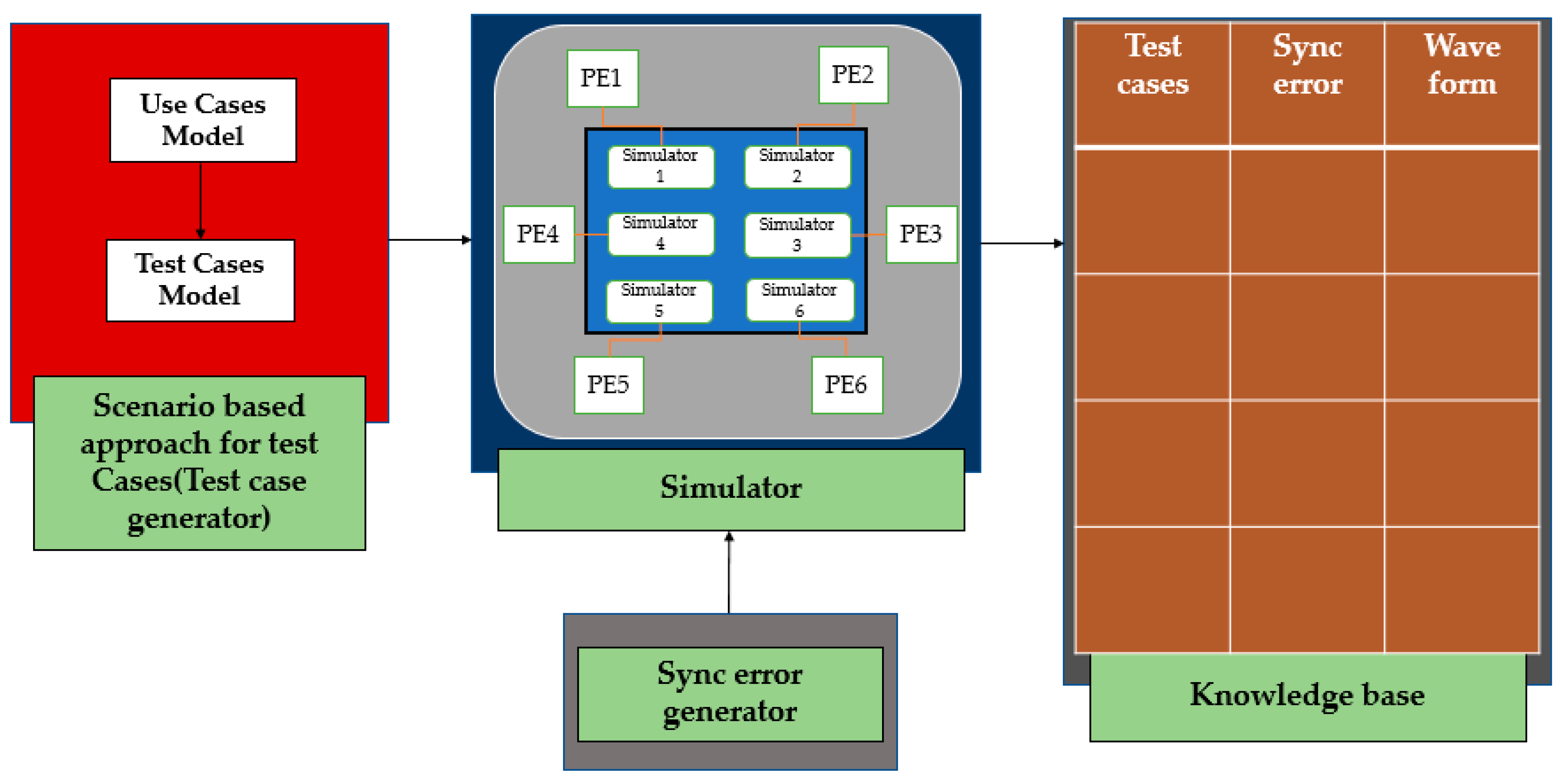
The proposed technique used scenario-based analysis for test case generation. Scenario analysis is a popular way of building test cases from use cases. Use cases are the descriptions of the scenarios for which communication’s impacts are examined. Each use case has a particular scenario. Additionally, use cases are employed as a direction for the simulation. First, use case scenarios are developed in which communications at various links occurred in a synchronization sink. At a few links, there were also synchronization issues. As a result, we were able to achieve all noticeable effects. Numerous synchronization errors were discovered in interprocessor communication. Test cases are generated using a test case generator to cover all scenarios across multiple interfaces to assess that PEs communication occurs both with and without synchronization errors using use cases in the proposed technique. The test cases are stored in a knowledge base in circumstances where there is a specific error. Numerous synchronization errors are induced in the interfaces, since these interfaces are prone to a variety of errors. The synchronization error generator will generate these errors. The simulators receive the test cases after that. In the proposed technique, across multiple PEs, the communication is simulated on multi simulators. Every simulator instance is associated with a different PE. These instances are used to develop to simulate interprocessor communication for testing and debugging the embedded system. The simulator simulates the outputs of each particular error depending on the particular test case and created synchronization errors. The simulated results are saved in the knowledge base. These errors in interprocessor communication are detected and simulated in Xilinx.
The knowledge base technique contains test cases, synchronization errors and the simulated waveform across these synchronization errors.
Figure 3 depicts the knowledge base creation steps. First, we created a knowledge base that includes every conceivable and specified combination of synchronization-related errors that might arise in high-speed serial interfaces, as shown in
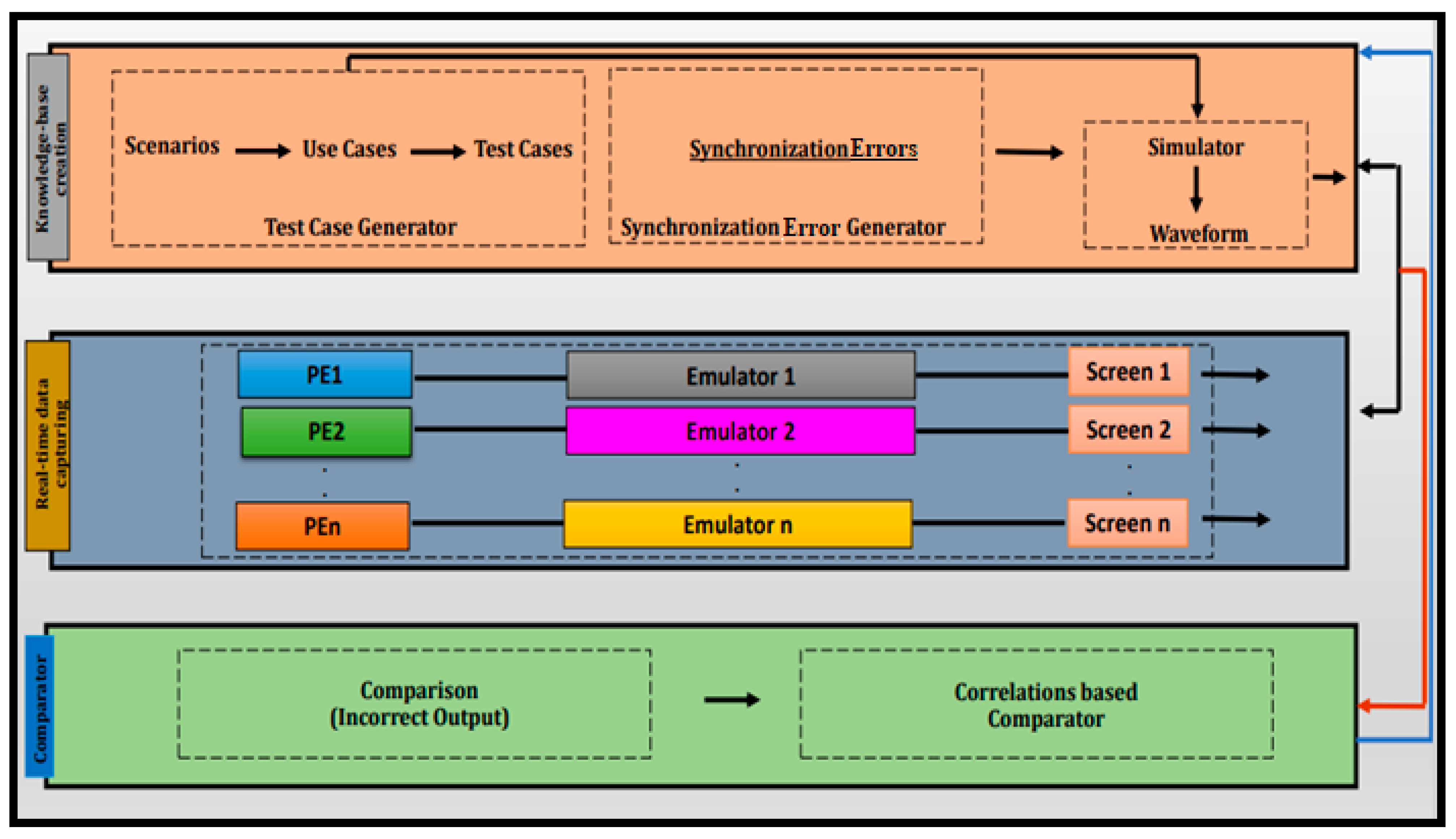
Figure 2. Then, the proposed technique was used for localizing the synchronization errors by capturing the real-time data across multi PEs interfaces in a multiprocessor-based real-time embedded system using multiple emulators. Then, we compared the actual result of the real-time embedded system with the result stored in the knowledge base to find the correlations between them. The steps for the detection and localization of the errors are shown in
Figure 4. Each emulator is connected with a different PE. So, if there are six PEs, it means that they connected with six different PCs using emulators.
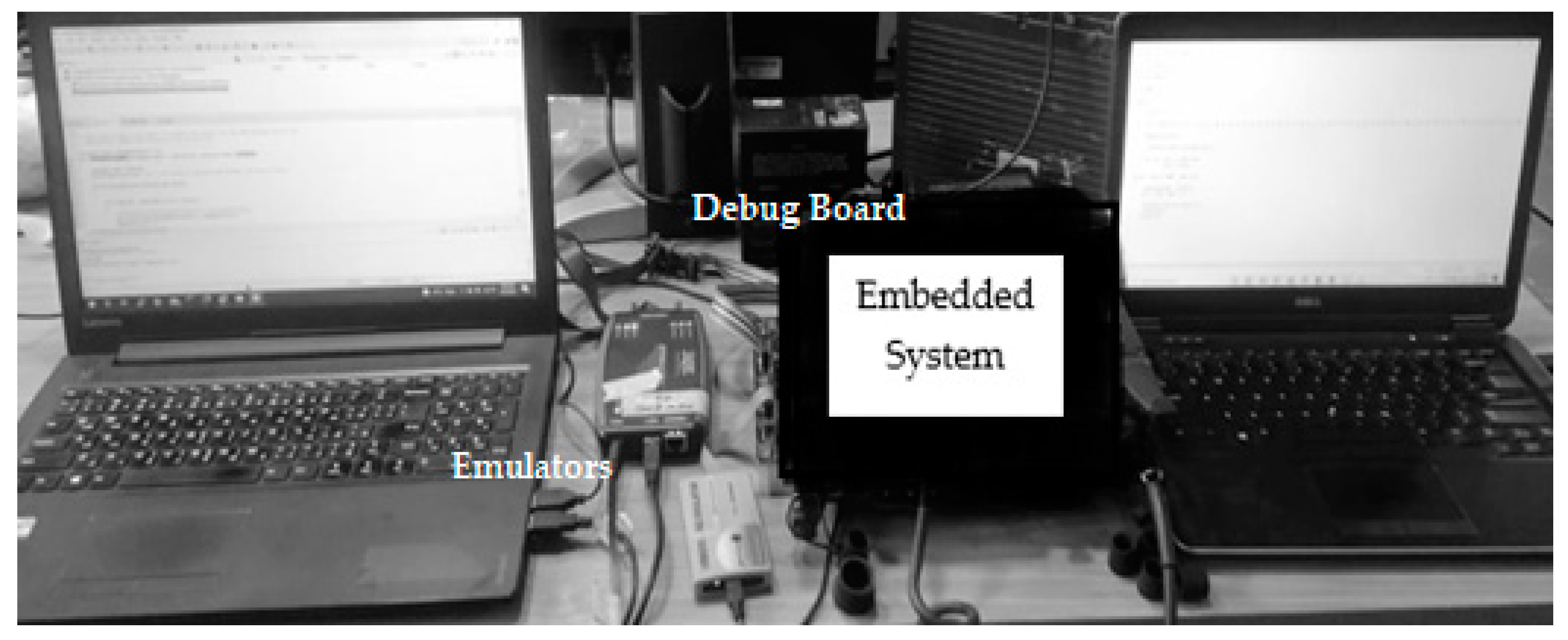
This way, we will have six screens that show what is happening inside the PEs using emulators. The environmental setup of the emulator is shown in
Figure 5. Emulators communicate with the PC over the universal serial bus (USB) and with processors over a joint test action group (JTAG). The emulator is used to find the outputs at each interface, as further reported in [
53]. The input to the system is the ramp signal. The ideal signal for testing the interprocessor communication with a high-speed serial interfaces is a ramp (rectifier in analogy to half-wave rectification).
The input to the system is the ramp signal. The ideal signal for testing the interprocessor communication with high-speed serial interfaces is a ramp (rectifier in analogy to half-wave rectification). Ramp signals contain values that provide visible signs of several errors that may happen during interprocessor communication as well as assist in understanding the dynamic system behavior via the velocity factor. The ramp function r (n) is a function that only occurs on the positive side and is zero on the negative side [
54]. It is denoted by r (n) and may be represented in equation form as shown below.
To test the multiple interfaces across multi PEs, we generated a ramp signal continuously and increased the ramp signal from 0 to 255 where the value of n in Equation (1) is 0 to 255. To produce all conceivable forms of the ramp, we reported in the article to observe how the shape of a ramp signal varies by inducing synchronization errors.
The ramp signal is generated continuously in these PEs and increased from 0 to 255. Once a ramp signal is given input to the interface, the ramp signal is generated as the output. Sometimes, intricacies are faced in the interfaces, due to which different waveforms are received as the output of the last processor. Some values have been missed or overlapped if the ramp signal is erroneous.
It is possible that after passing through six different interfaces, six different errors will occur, and it is also possible that the same error will occur on all six different interfaces. In consideration of the problem, we capture all the real-time data of every PE when the signal goes from one processor to another by using emulators, and their results are shown on different screens. We used a debug board in the multiprocessor embedded system environment where multi PEs are connected.
Figure 6 shows the emulator environment where two emulators are connected with two PEs.
The waveform of the signal of simulated synchronization errors that are already recorded in the knowledge base was compared to the incoming output signal of high-speed interfaces. Then, the system’s specific use case was compared with the closest correlation. In this way, the proposed technique has been validated. The outputs are also used to automatically narrow down and determine the individual interfaces that are creating errors.
5. Real-Time Embedded System under Test
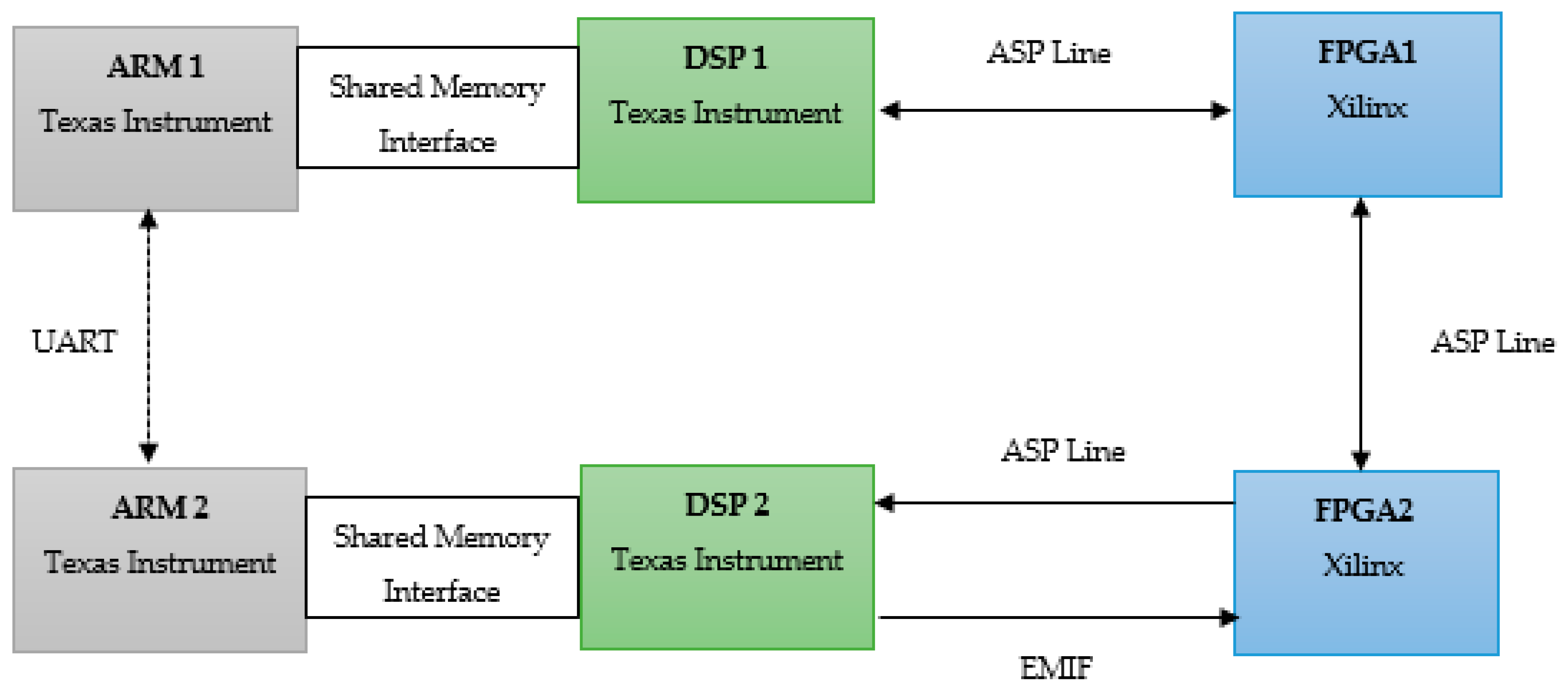
The system under test consists of six PEs, i.e., advanced RISC machines (ARMs), field programmable gate arrays (FPGAs), and digital signal processors (DSPs), as shown in
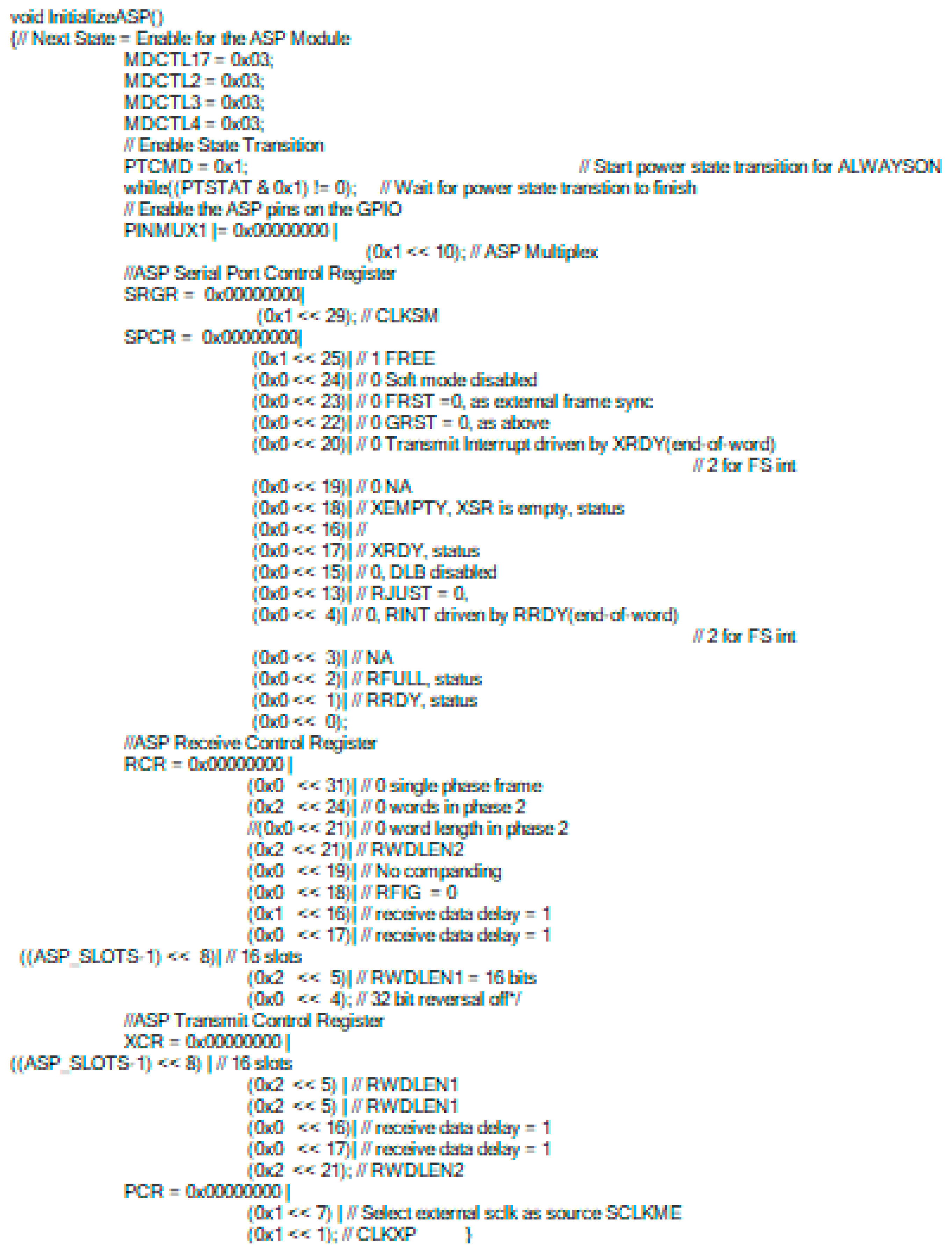
Figure 7. The PEs interact with each other with different types of high-speed serial interfaces. The ASP line is an audio serial port.
Figure 8 shows the ASP initialization code. It is used for audio streaming as well as data transmission because the SoC is used for video processing. The ARM interface operates at a speed of 4 Mbps, while the shared memory interface operates at 10 Mbps, the UART operates at 115,200 bps, and the EMIF operates at 20 Mbps.ARMs control all the signals. UART (universal asynchronous receiver-transmitter) is used only for the control path.
The functionality of each processing element is tested individually, but still, it fails when interprocessor communication occurs due to high-speed serial interfaces. High-speed serial interfaces act as conveyor belts in the system. Several synchronization-related errors have been identified due to high-speed serial interfaces while developing and testing the embedded system. In debugging mode, processing elements are working normally, but they send ramps instead of data. Once the system is fully loaded, numerous synchronization issues arise due to high-speed serial interfaces. Therefore, we run the system in debugging mode and send the ramps.
Initially, a knowledge base has created with simulated waveforms where we induced synchronization errors on multiple different high-speed serial interfaces. We have created thousands of combinations of these errors in the knowledge base and then perform actual testing by capturing the real-time data using emulators. We have used Spectrum Digital XDS560-V2 (Spectrum Digital emulator, Stafford, TX, USA), Blackhawk USB200 (EWA Technologies Blackhawk emulator, Cerritos, CA, USA), and E-Elements v2-1(E-Elements technology co ltd emulator, Taipei, Taiwan) for capturing real-time data across PEs. Spectrum Digital XDS560-V2 and Blackhawk USB200 emulators are used for capturing the data in ARM 1 and ARM2. They are also used for DSP1 and DSP2. E-Elements v2-1 emulators used for FPGA1 and FPGA2.
After acquiring the actual system ramps using emulators, we compare the actual system’s ramps to the stored simulated ramps of the knowledge base and compute the correlations between them. In this way, we can identify and localize the errors using the knowledge base technique. For example, the embedded system is running, and if we do not achieve the desired results, we attribute it to some type of synchronization error. A mode in the DSPs is enabled (debugging mode) where the DSPs perform their respective processing so they run in maximum load, but on the links, a ramp is sent. Every DSP receives a ramp from its connected PE and passes it forward at the time DSP is interrupted for transmission under actual load. The knowledge base created is then used to localize the error by matching the outputs of PE with the one stored in the knowledge base. Then, the comparator computes the correlations between them. Using the knowledge base technique, we would detect and locate the errors in this manner.
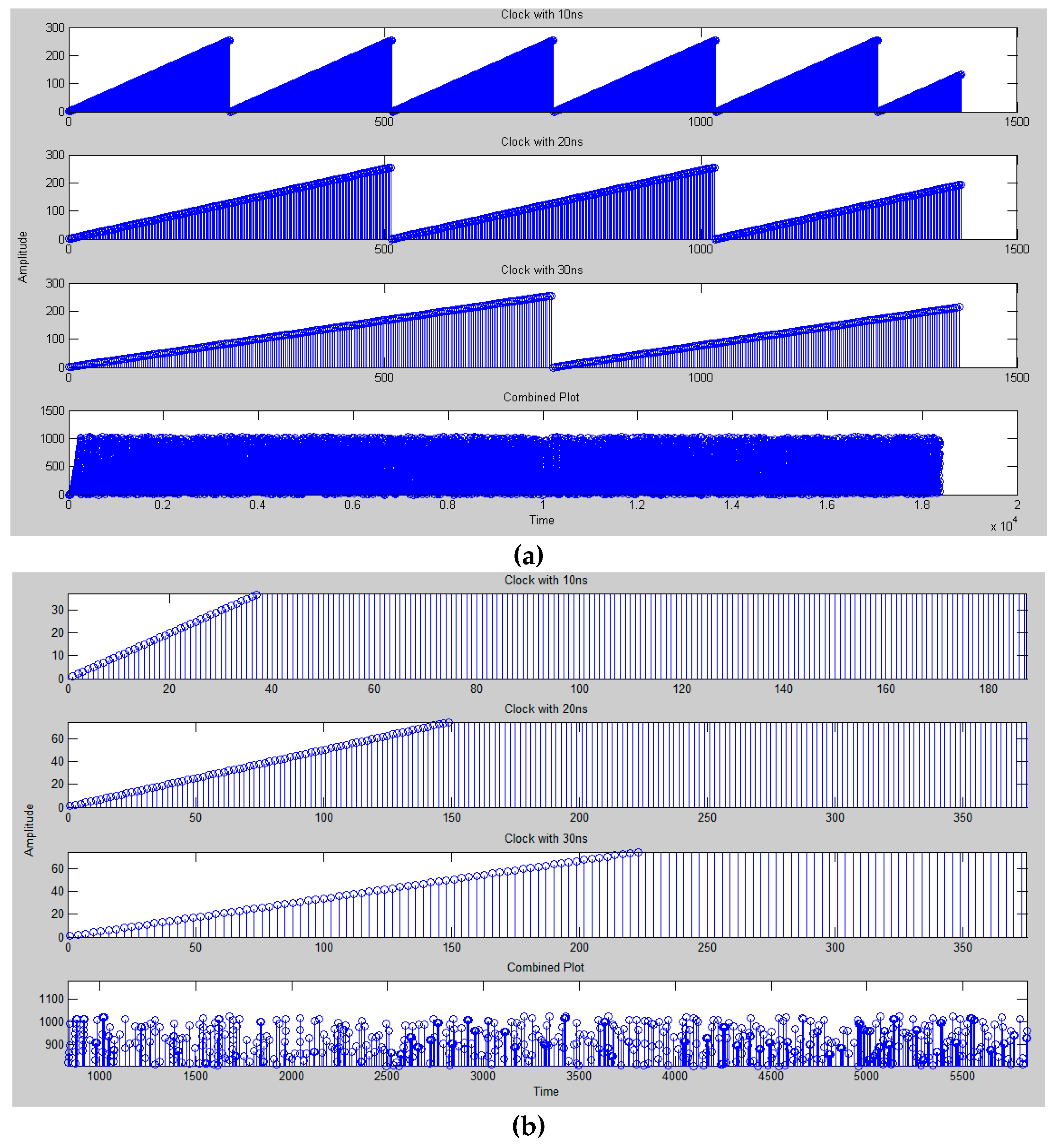
7. Results Analysis
The experimental results of the technique that are showing the benefits in terms of performance and scalability are shown in this section. The first experiment involves four PEs in which the ramp signal is given to the input of the PEs. All PEs are communicated with each using different clock rates where delays are induced in all three PEs, i.e., PE1, PE2, and PE3, as shown in
Figure 11.
PE 4 generates the cumulative output of all the PEs shown in
Figure 11a, which provides the simple view of the embedded system, and
Figure 11b provides the expended view of where delays are induced in all three PEs.
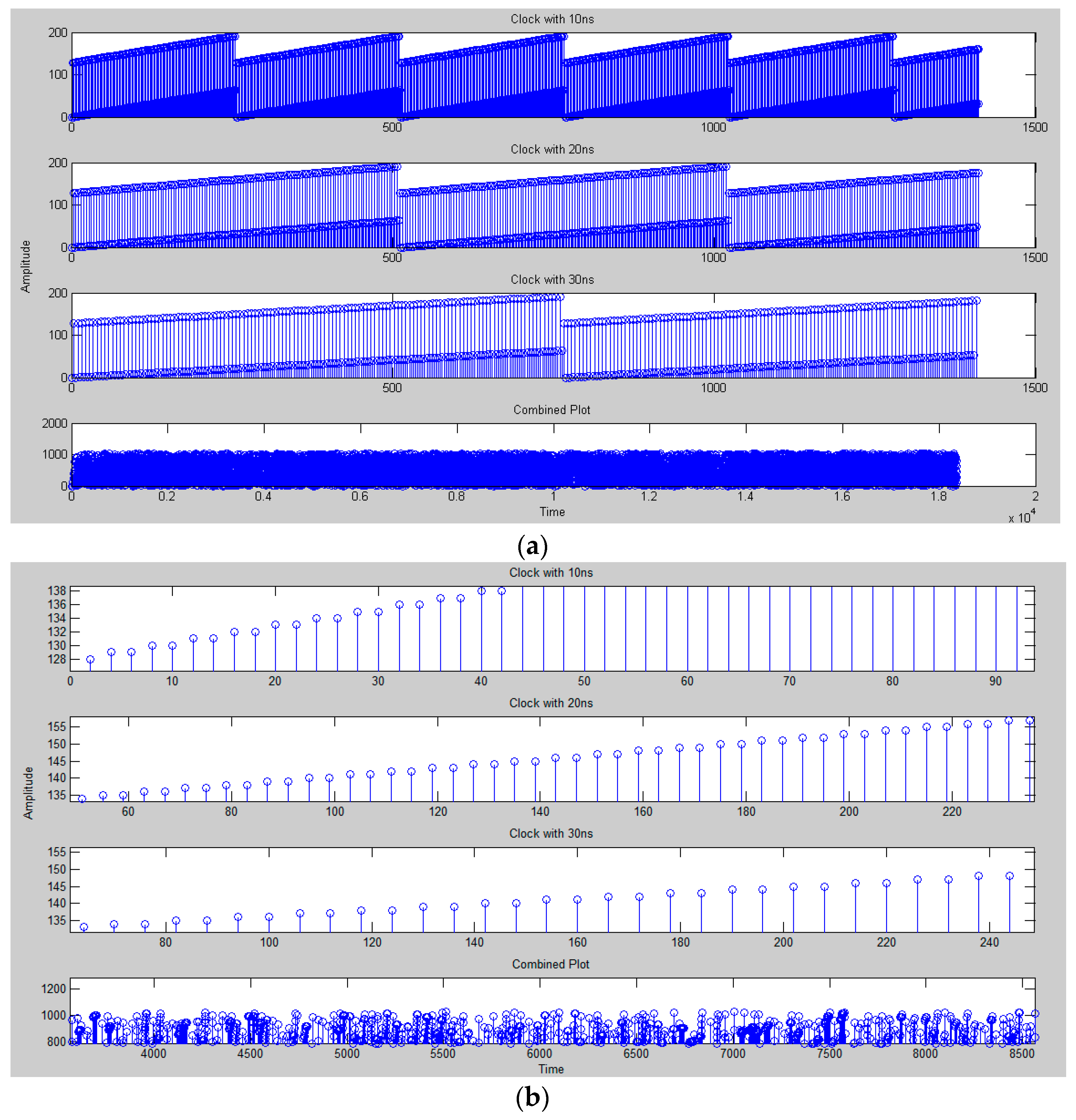
Two synchronization errors such as delay and bit miss errors induced on the PEs in the second experiment are shown in
Table 3. All PEs communicate with each other with different data rates.
Figure 12a provides a simple view of the embedded system where PE1, PE2, and PE3 contained two errors.
Figure 12b provides the expended view of the PEs of the embedded system where PE1 contained a delay error, PE2 and PE3 contained bit miss errors, and PE4 generated the cumulative output of all the PEs in the system.
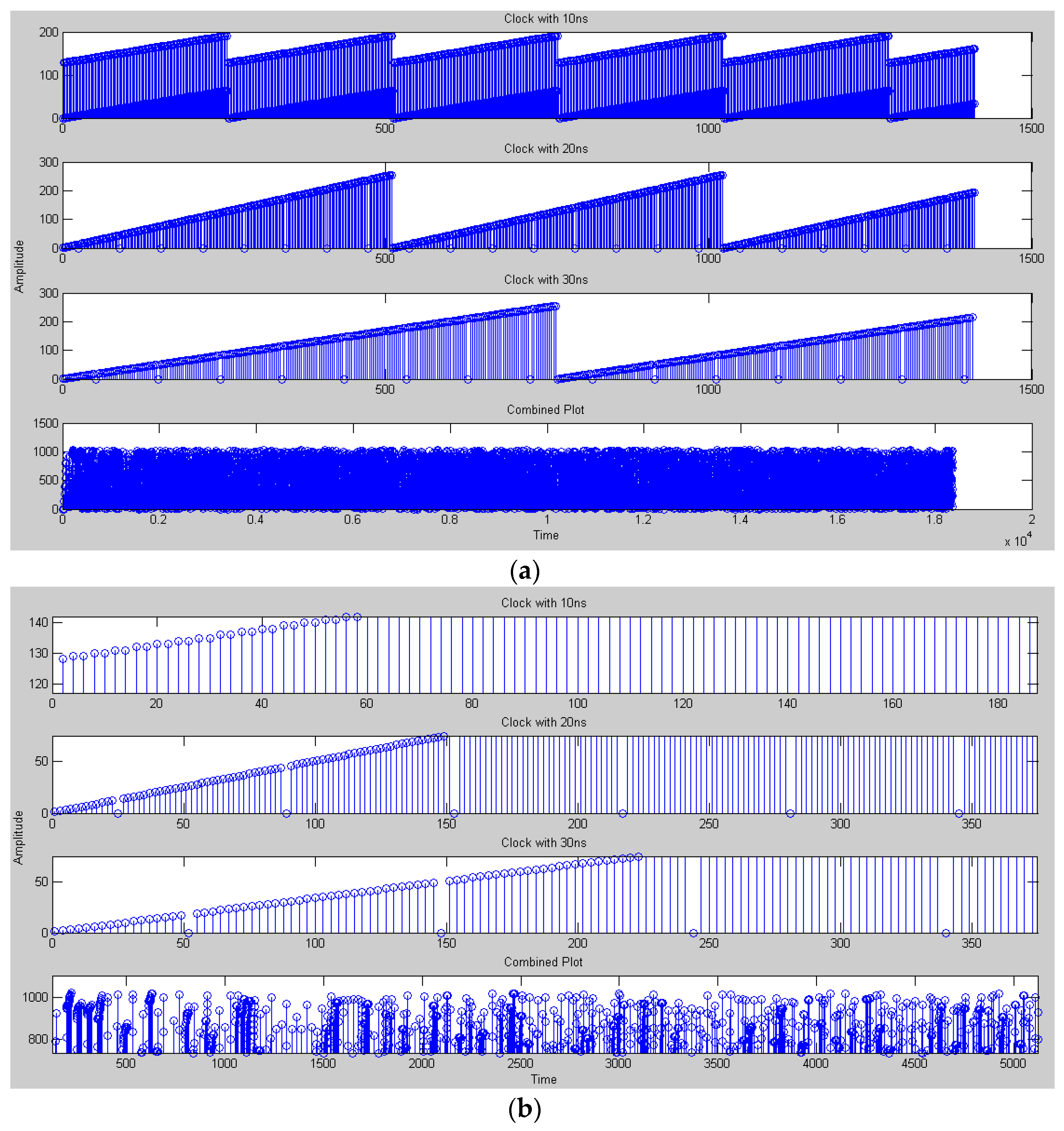
Thus, in the third experiment on three different PEs, three different synchronization errors are induced in the embedded system. Firstly, the delay was induced on PE1; then, a bit miss error was induced on PE2. Lastly, a double read error was induced on PE3.
Figure 13a provides a simple view of the embedded system where PE1, PE2, and PE3 contained three errors on three different interfaces.
Figure 13b provides the expended view of the PEs of the embedded system where PE1 contained a delay error, PE2 contained a bit miss error, PE3 contained a double read error, and PE 4 generated the cumulative output of all the PEs in the system.
Every possible error was simulated by ourselves and stored in the knowledge base. If a new error comes into the real-time system, our proposed framework will simulate that error and will store it on the knowledge base. Once a knowledge base is created, the next step is to capture the real-time data from different interfaces using emulators.
Every emulator is attached to a PE with a different PC in the proposed approach. Different emulators were used that connected with the interfaces of the PE in which the data in real time were captured.
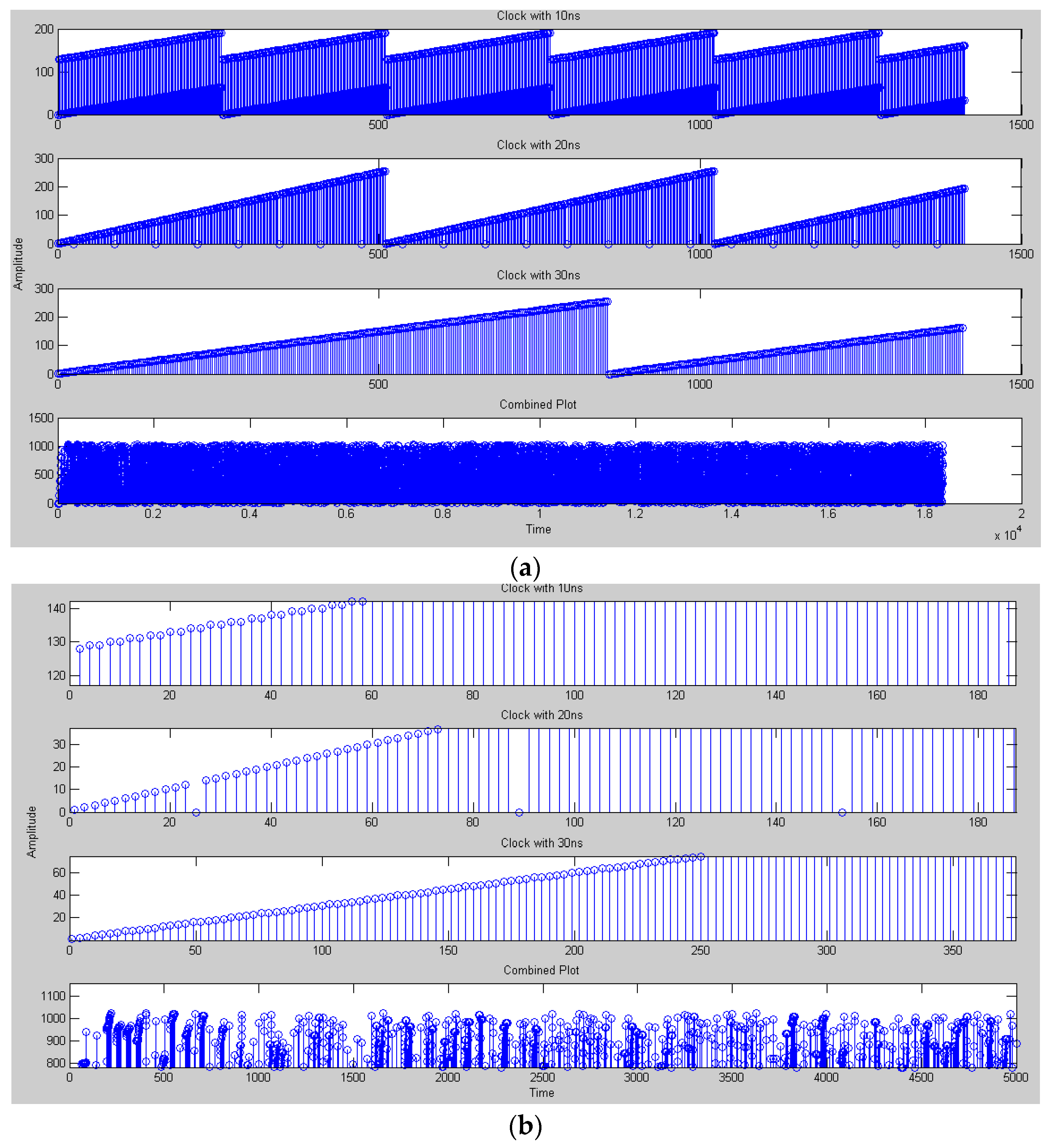
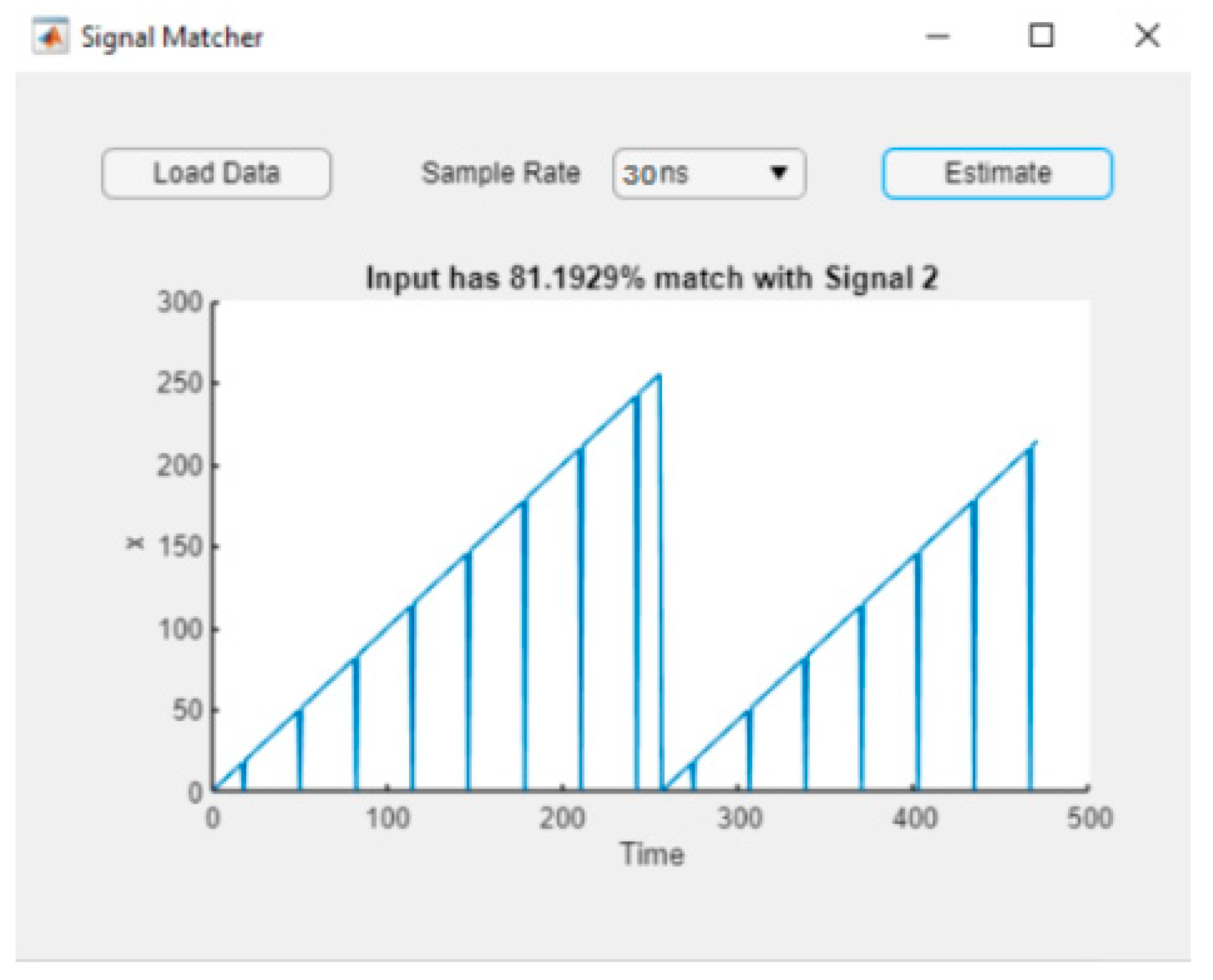
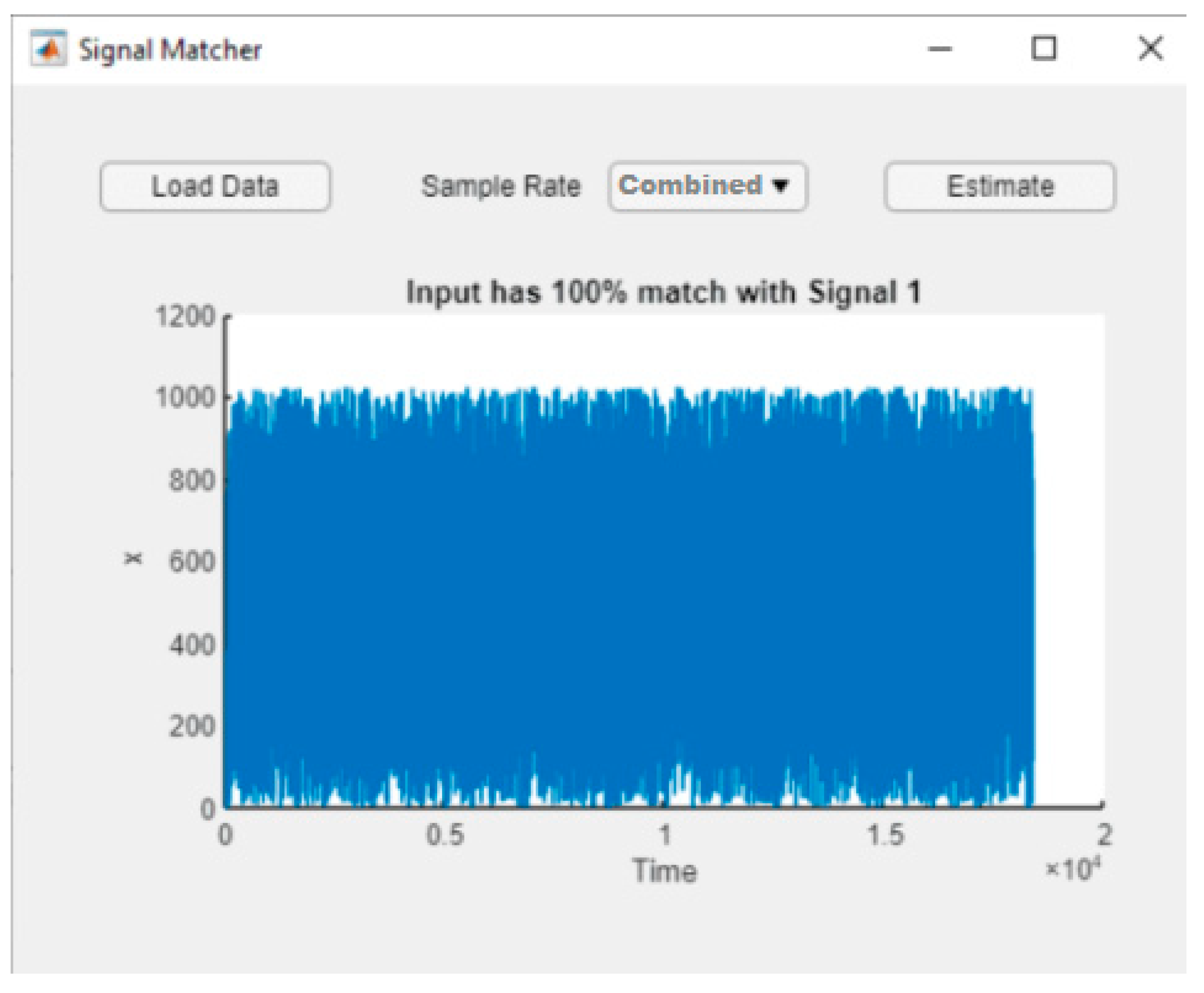
Input from one processor to the other is sent by a ramp signal. Using emulators, every PE’s real-time data are captured. The comparisons are being made with the already simulated synchronization waveforms that have been stored in the knowledge base. The outputs of the emulators are compared with the stored results in the knowledge base for possible matches using correlations shown in
Figure 14 and
Figure 15. This helps identify the specific PE that is malfunctioning. When the real-time data from multiple interfaces do not reflect the actual outcomes, then correlations between the actual results and the knowledge base’s stored results are examined. This allows us to identify where the synchronous error is and which interface is causing the error; then, we fix that error immediately.
8. Discussion
Numerous PEs in a real-time embedded system interacted using a variety of physical interfaces. The foundation of communication today is high-speed interfaces, which are essential elements of any electrical design. Embedded to high-performance systems, on-chip to longer distance communications employ a high-speed serial interface. The necessity for fast data processing has led to a steady increase in the data transmission speed of these interfaces. As the requirement for fast transfer rates has grown, it has become more complicated than ever to test, debug, and validate these interfaces throughout development. This can be accomplished either via the acquisition of specialist test equipment and software or by a third-party vendor. Testing is a systematic procedure for locating and reducing errors in computer software or a piece of electronic hardware so that it performs as intended. Several investigations have been made on high-speed serial interfaces in multiprocessor-based embedded systems in the literature; most of these studies were based on functional debugging and testing, and many of the studies used electronic equipment to test and debug high-speed serial interfaces. Moreover, testing and debugging approaches do functional testing and debugging, but the problem reported in this study is that the synchronization errors are caused due to interprocessor communication. These are not functionality-related errors of the PEs. All individual PEs are functionally debugged and tested. Furthermore, research into synchronization-related errors on high-speed serial interfaces during interprocessor communication is still lacking in the literature. Therefore, we present a knowledge-based technique for real-time testing of embedded systems’ high-speed serial interfaces. To detect and localize errors in real-time interprocessor communication, we proposed a technique that simulates communication across several PEs. We conducted research based on interprocessor communication for this aim and were able to uncover synchronization errors as a result. The proposed system aids in the detection of possible interprocessor communication synchronization errors.
Numerous experiments are carried out to prove the technique’s effectiveness by creating synchronization-related errors on interfaces. Synchronization and interprocessor communication are the most critical aspects that influence the performance of the embedded system. In this study, different kinds of synchronization errors are identified and induced on individual PEs. Then, they are induced cumulatively on several PEs in different experiments. The induced errors are simulated and stored on the knowledge base. Emulation is now most commonly used to investigate and troubleshoot the behavior of sophisticated devices with internal structures that are way too complex to be effectively described by computer simulation tools. From each PE, emulators are used to gathering real-time data. If the expected results do not reflect the actual results of PEs, a comparison with the knowledge base’s results is performed. Correlations between actual and simulated results are then calculated; i.e., the incoming waveforms are compared to the waveforms of simulated synchronization errors recorded in the knowledge base. In this way, different types of synchronization errors across single as well as multiple interfaces are detected and localized. Early detection and correction of these errors lower development time and block difficulties in the line. In the proposed technique, a knowledge base including all of the simulated waveforms of possible synchronization errors has already been built; thus, testing can be performed quickly and development time can be reduced once the test case fails. According to these findings, the technique is useful to test and debug high-speed serial interfaces in multiprocessor-based embedded systems. The work’s limitation is the need for more test cases, which may be developed by using various communication environments. Each new simulation environment, on the other hand, will have to be able to supplement current test cases that are continually updated to undertake more system testing and debugging.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}














