
Optimized Torque Performance of a 7-Phase Outer-Rotor Surface-Mounted Permanent Magnet Synchronous Machine for In-Wheel E-Motorcycle Application


Abstract
:1. Introduction
2. System Equations Review
2.1. Multiphase PM-Machine Equations
2.2. Winding Types
- (i)
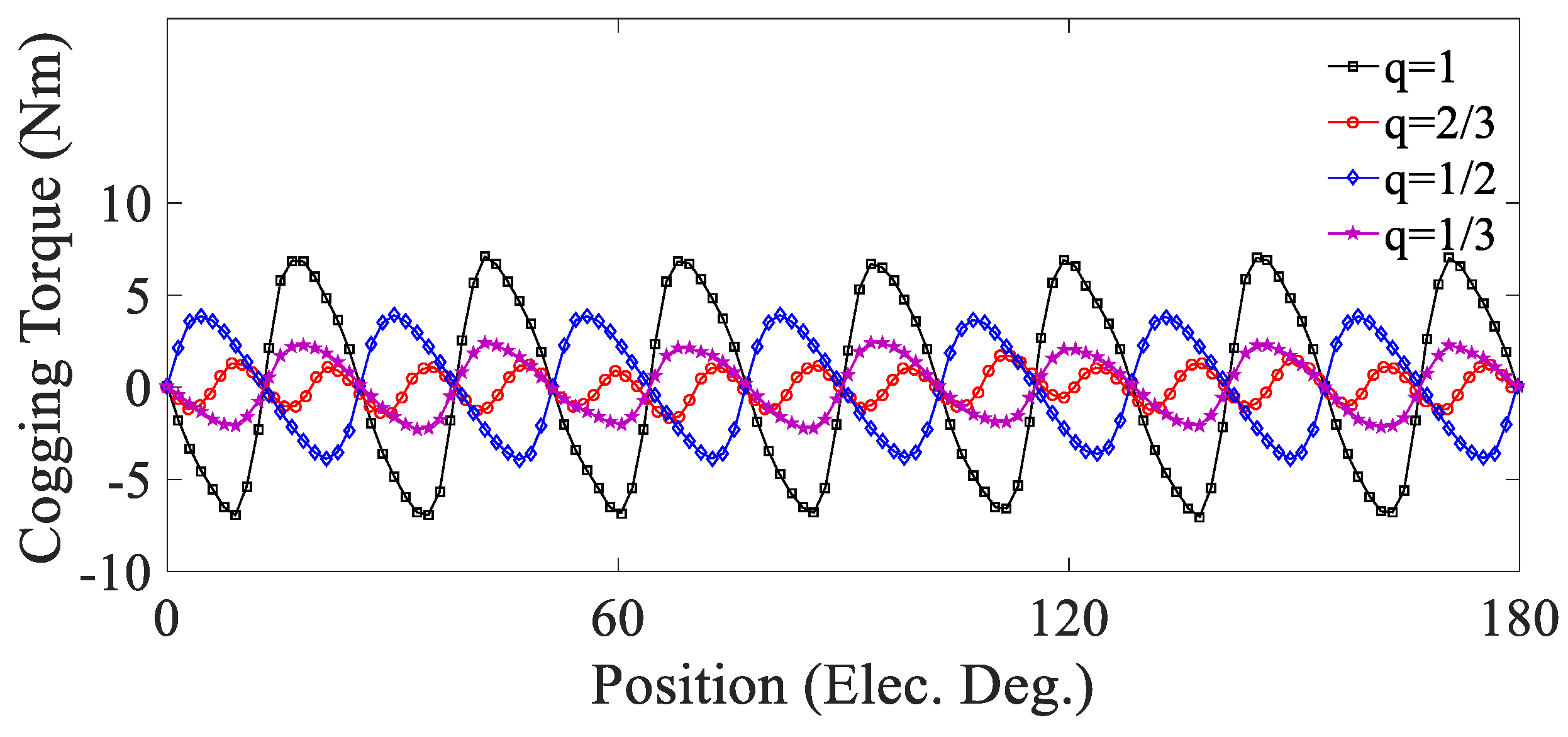
- q is an integer, distributed-winding type: conventionally used in electric machines, where greater value of q results in more sinusoidal magnetomotive force (MMF) wave produced.
- (ii)
- q is not an integer, concentrated-winding type: this type is mostly wounded in single or double layers, for which the comparison is given in Table 1.
3. Proposed Model
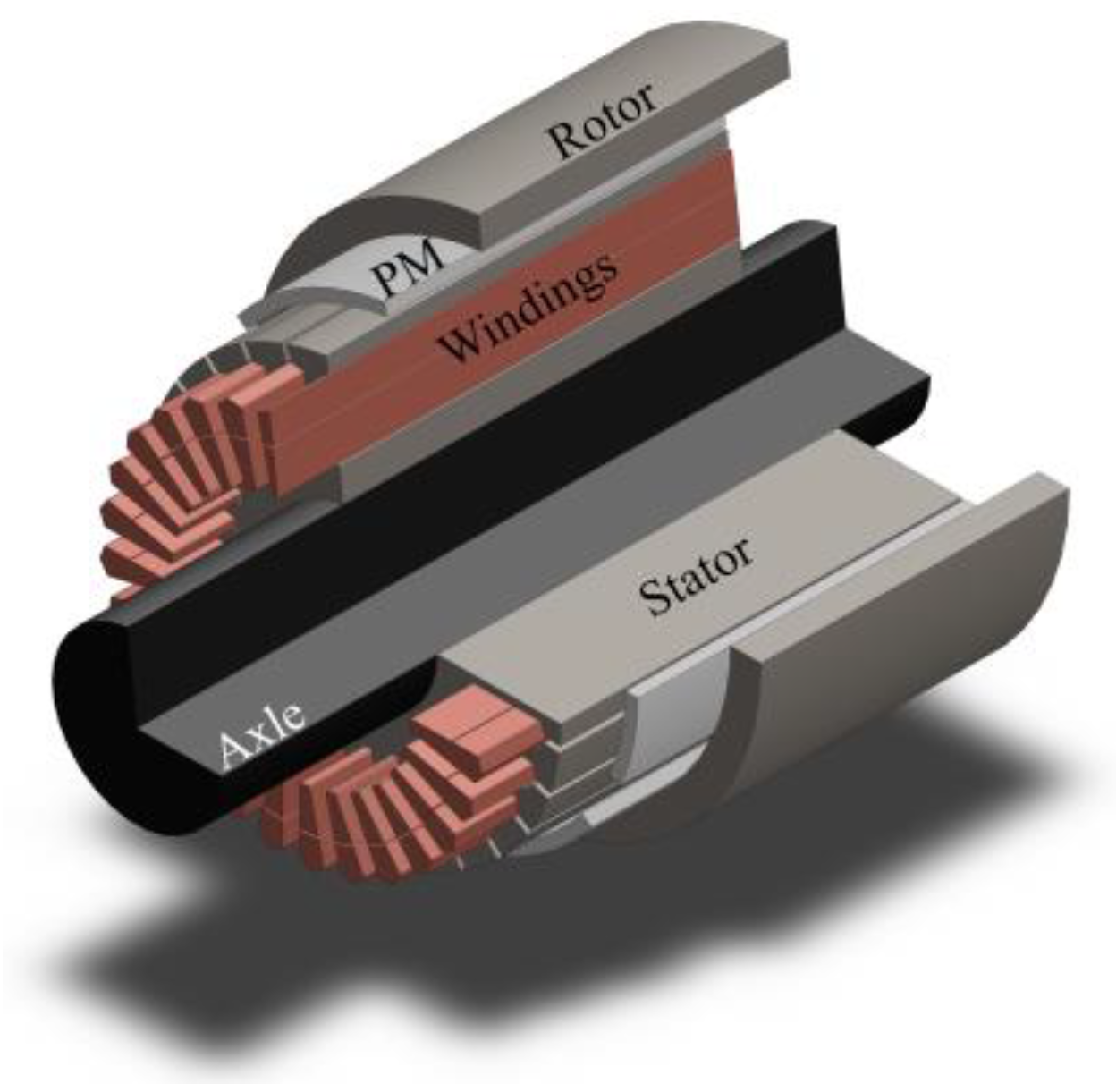
3.1. Configuration and Design Parameters
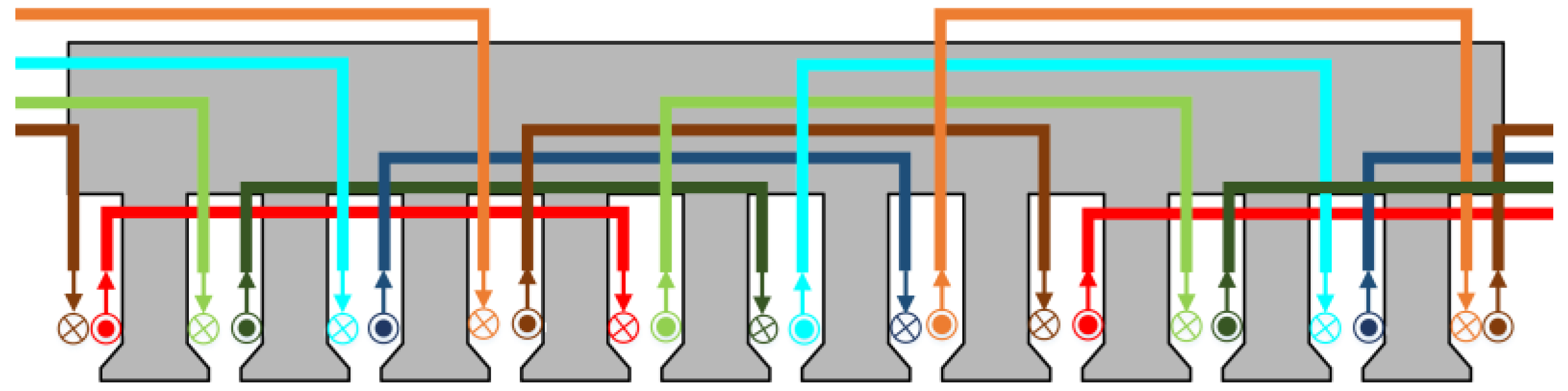
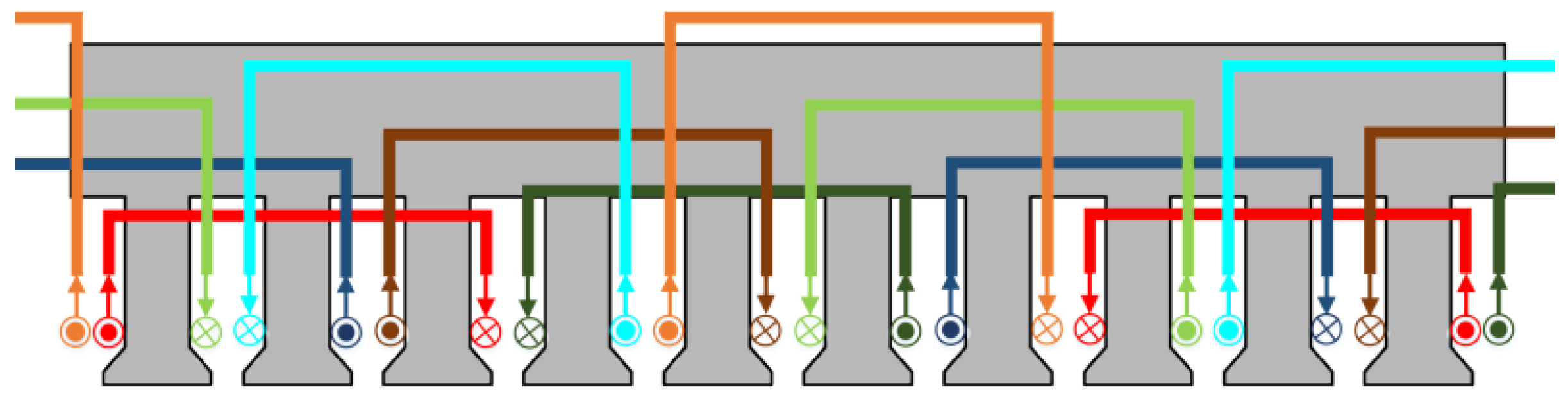
3.2. Winding Pattern
3.3. Variables and Objective Function
- ❖
- Initial Configurations
- ➢
- Objective Function:minimum torque pulsation, satisfying torque density and Back-EMF: determination through q selection
- ➢
- Constraints:initial design parameters in Table 2.
- ❖
- Candidate Model
- ➢
- Objective Function:minimize torque pulsation and maximize torque: for determination of the best-performing model through FE sensitivity analysis
- ➢
- Constraints:WPM = 4 mm, LSSD = 25 mm, WST = 5 mm, TCog ≤ 1 Nm, TRipple < 5%, Tavg ≥ 80 Nm
- ❖
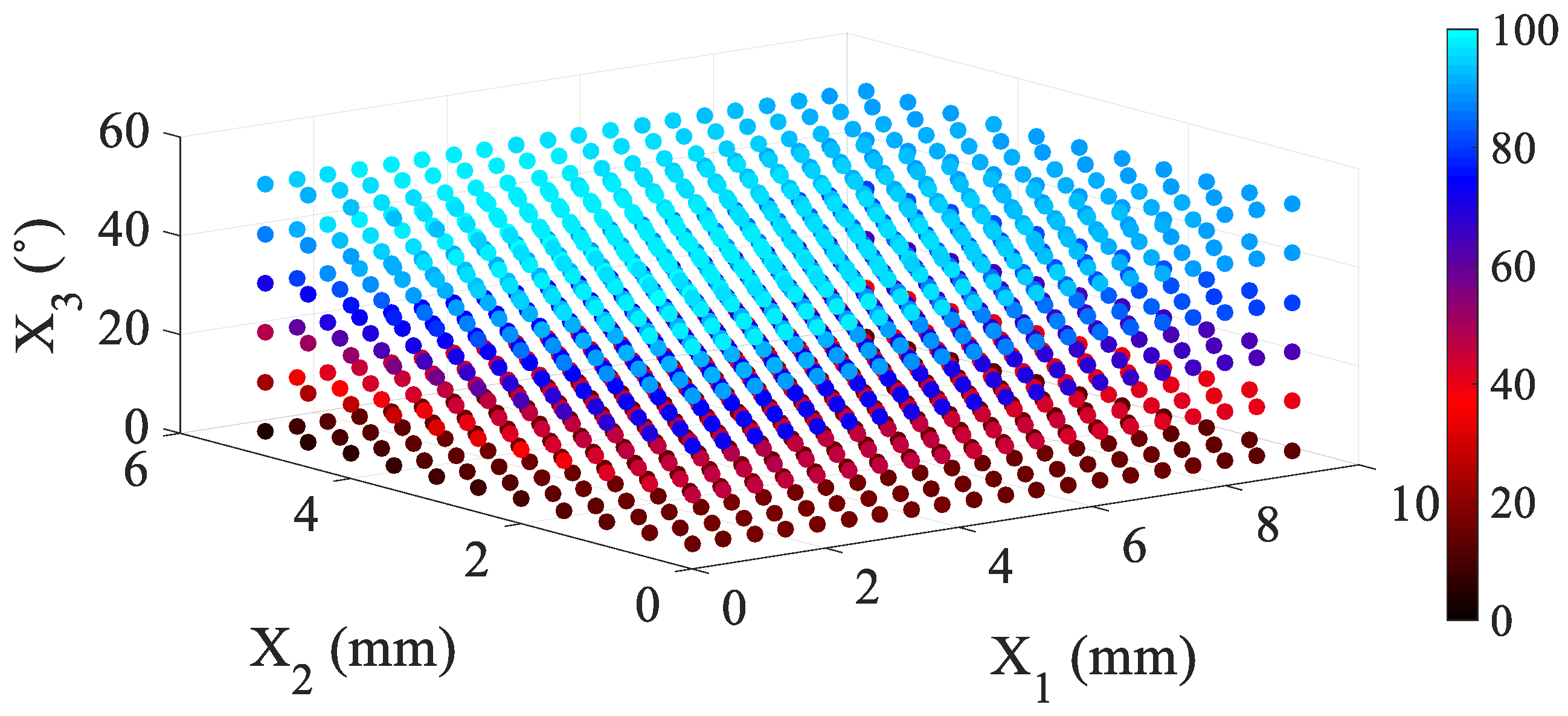
- PM Dimension and slot entrance design variables:0 mm ≤ X1 ≤ 9 mm, 0 mm ≤ X2 ≤ 5 mm, 5° ≤ X3 ≤ 55°
4. E-Magnetic Results
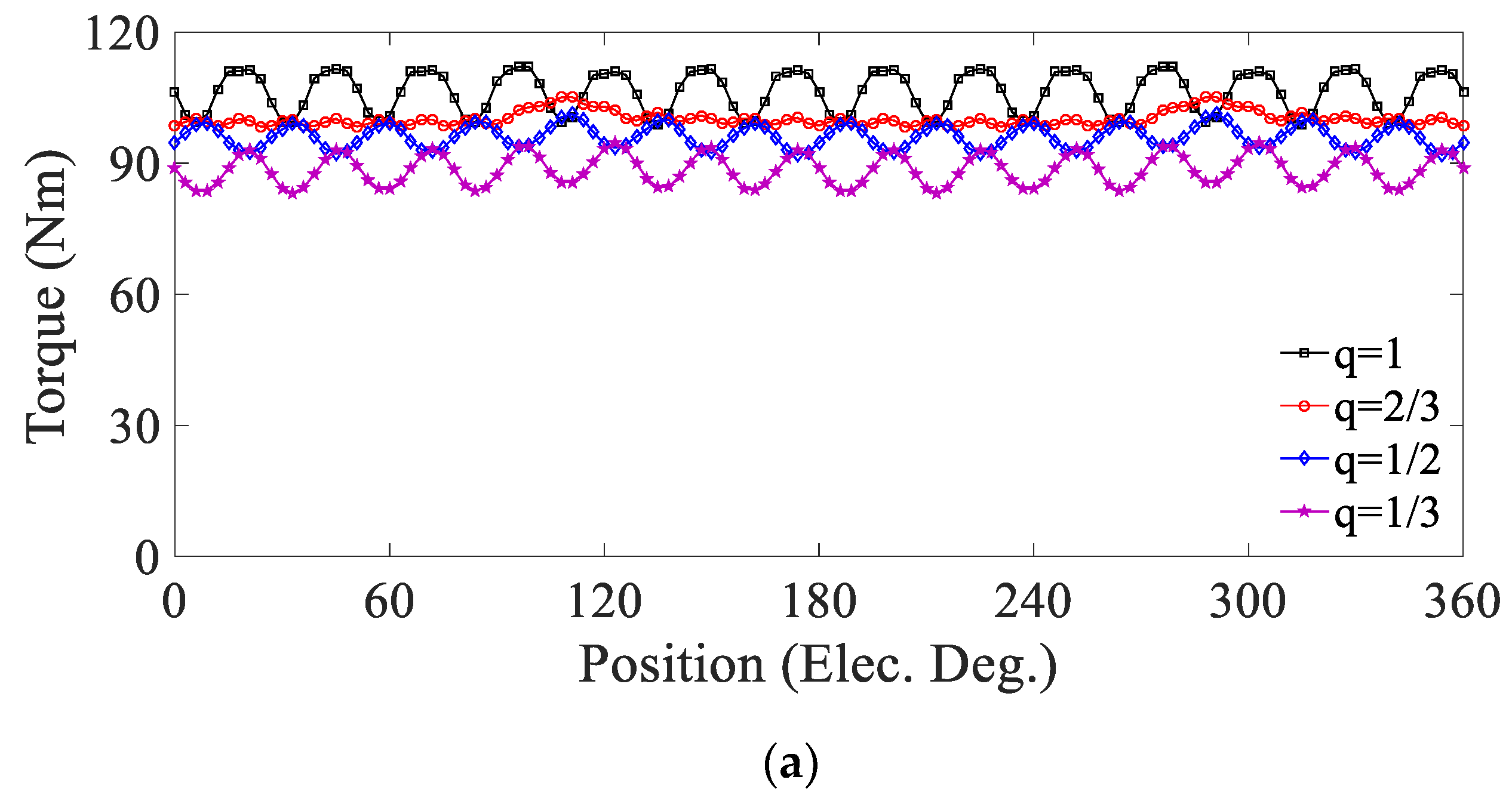
4.1. Analysis of the Initial Models
4.2. Sensitivity Analysis of the Candidate Model
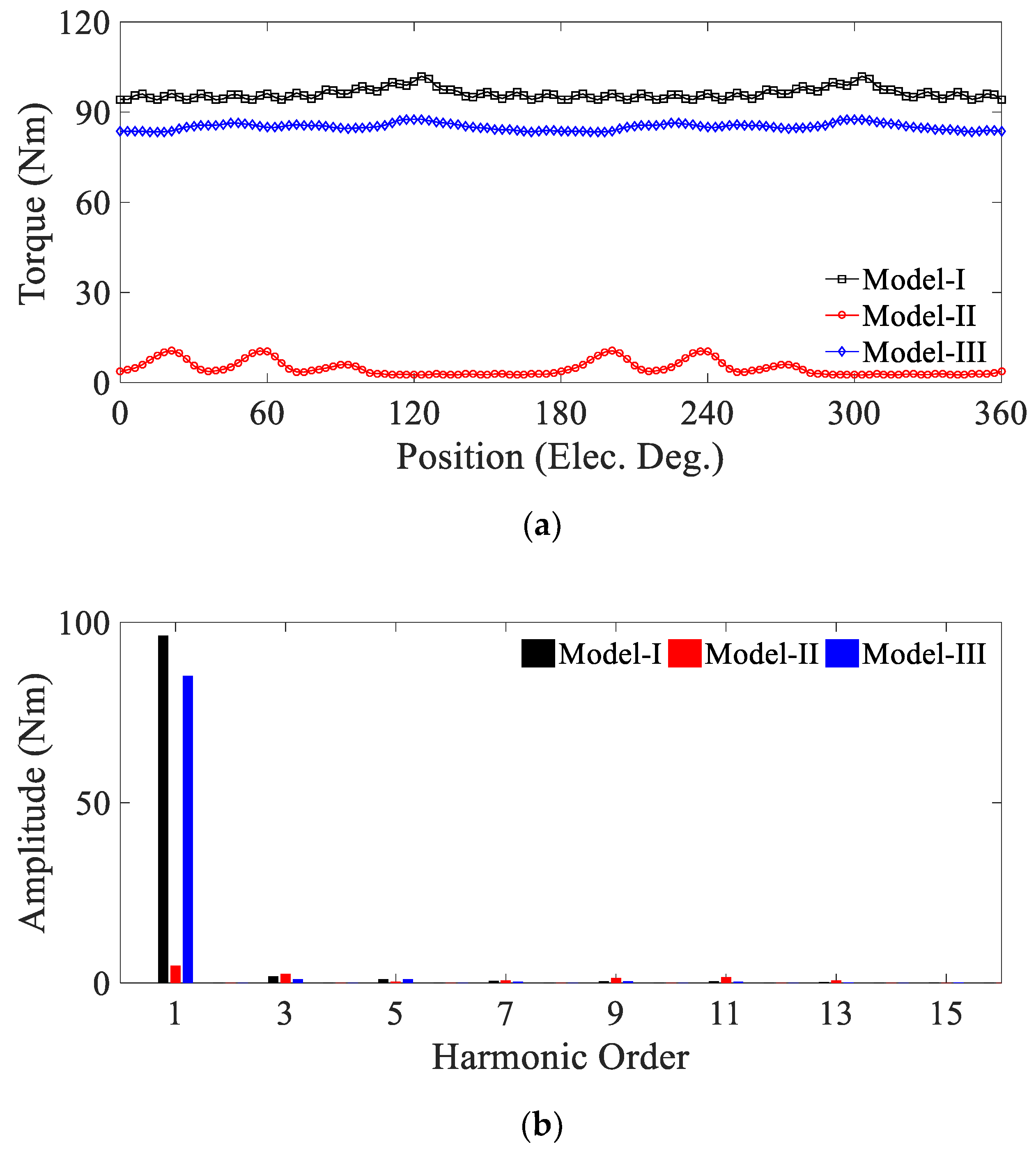
4.3. Analysis of the Optimized Models
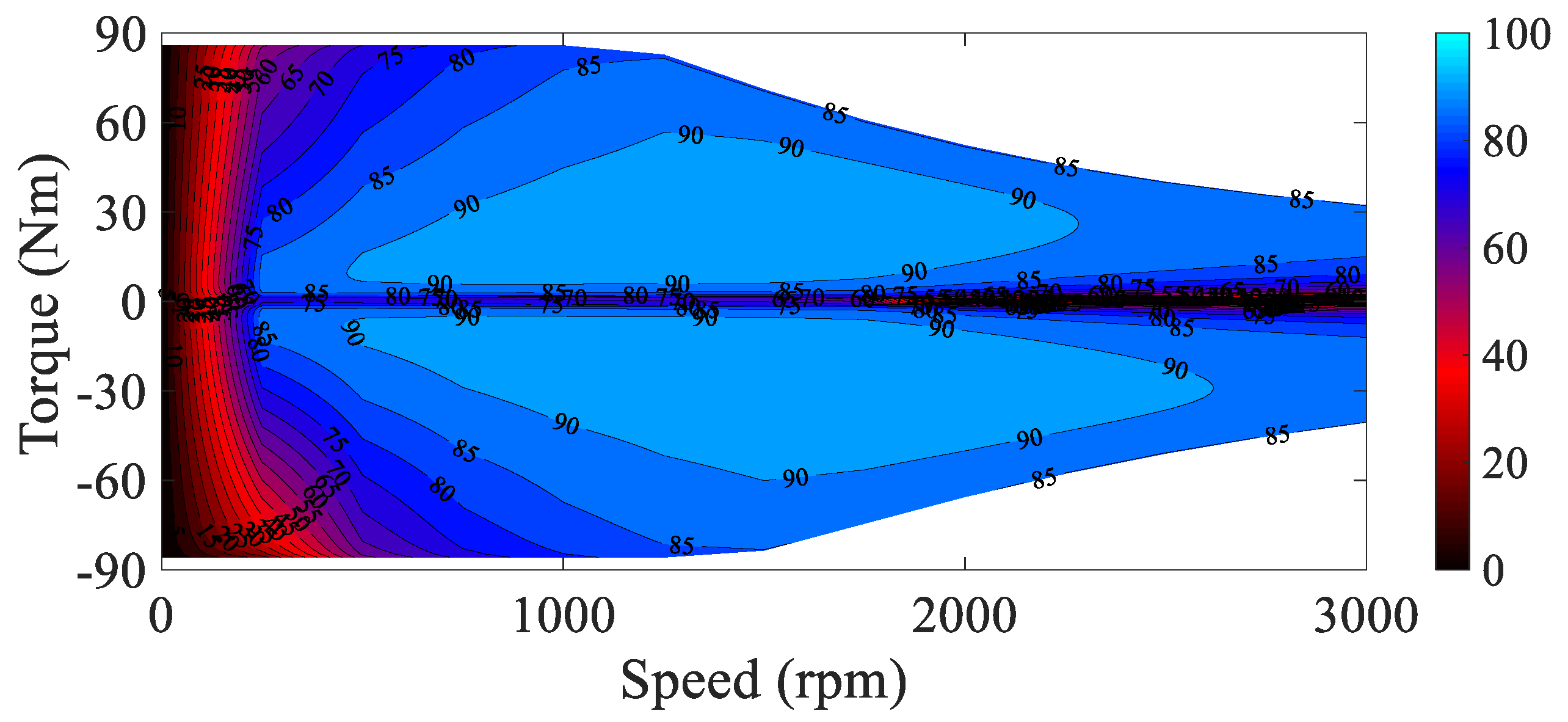
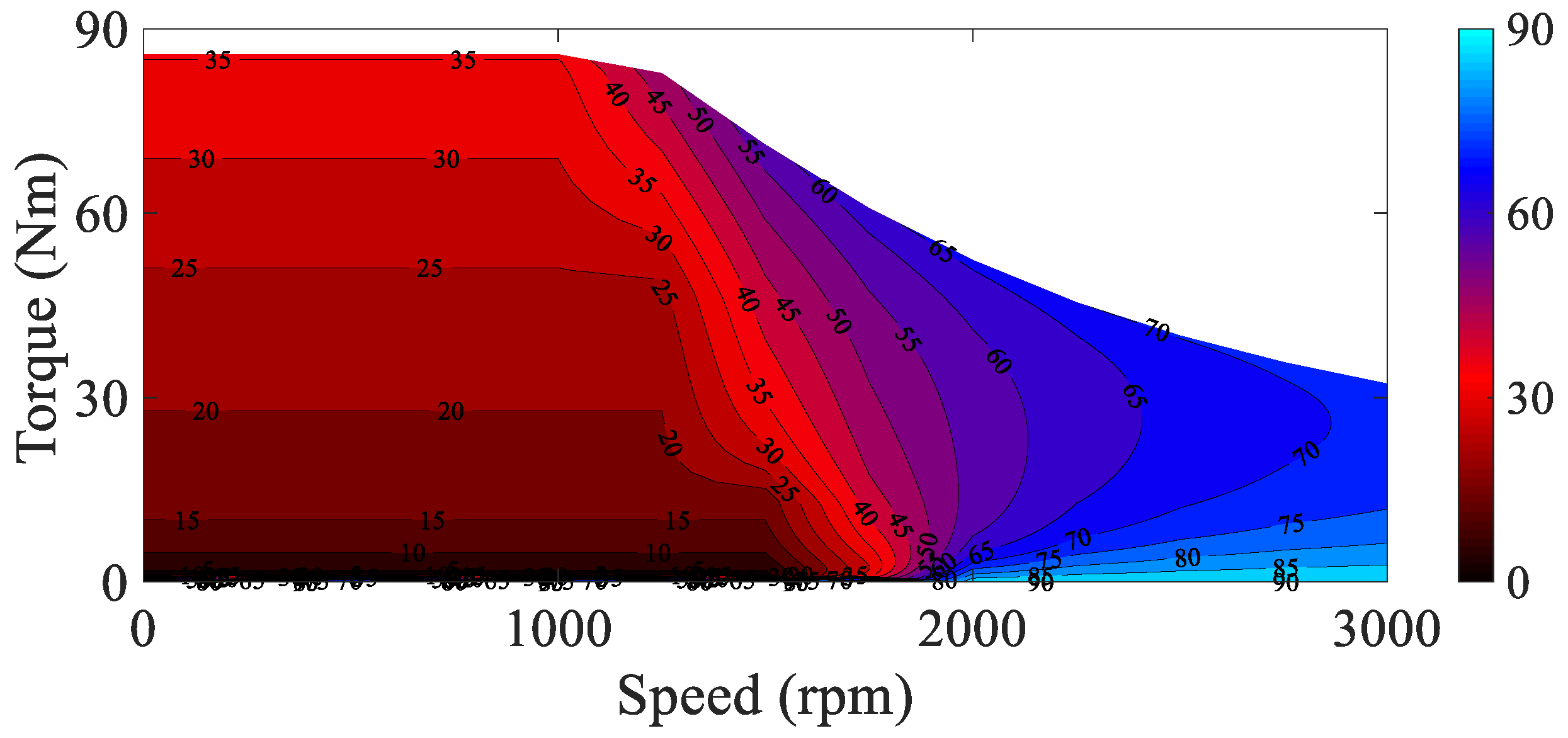
4.4. Efficiency and Power Factor Map
4.5. Artemis Drive-Cycle Analysis
- -
- Urban Cycle: 991 s of operation with an average speed of 17.7 km/h, displacement value of 4.9 km, and Max. speed of 57.3 km/h
- -
- Rural Road Cycle: 17.3 km rural road trip in 1080 s with an average speed equal to 57.5 km/h reaching its Max. at 111.1 km/h.
- -
- Motor Way130 Cycle: 96.9 km/h average speed (Max. 131.4 km/h) in 1066 s for 28.75 km motorway trip.
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A


References
- Zeraoulia, M.; Benbouzid, M.; Diallo, D. Electric Motor Drive Selection Issues for HEV Propulsion Systems: A Comparative Study. IEEE Trans. Veh. Technol. 2006, 55, 1756–1764. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Xue, Z.; Zhang, L.; Hua, W. A low-complexity three-vector-based model predictive torque control for SPMSM. IEEE Trans. Power Electron. 2021, 36, 13002–13012. [Google Scholar] [CrossRef]
- Marmaras, C.; Xydas, E.; Cipcigan, L. Simulation of electric vehicle driver behaviour in road transport and electric power networks. Transp. Res. Part C Emerg. Technol. 2017, 80, 239–256. [Google Scholar] [CrossRef]
- Ghorbani, H.R.; Moradian, M.R. Torque Pulsation Reduction in five-phase PMSyncRMs. J. Power Electron. 2021, 22, 128–137. [Google Scholar] [CrossRef]
- Moradian, M.R.; Soltani, J.; Najjar-Khodabakhsh, A.; Arab Markadeh, G.R. Adaptive Torque and Flux Control of Sensorless IPMSM Drive in the Stator Flux Field Oriented Reference Frame. IEEE Trans. Ind. Inform. 2019, 15, 205–212. [Google Scholar] [CrossRef]
- Jing, L.; Pan, Y.; Wang, T.; Qu, R.; Cheng, P.-T. Transient Analysis and Verification of a Magnetic Gear Integrated Permanent Magnet Brushless Machine with Halbach Arrays. IEEE J. Emerg. Sel. Top. Power Electron. 2022, 10, 1881–1890. [Google Scholar] [CrossRef]
- Jing, L.; Tang, W.; Wang, T.; Ben, T.; Qu, R. Performance Analysis of Magnetically Geared Permanent Magnet Brushless Motor for Hybrid Electric Vehicles. IEEE Trans. Transp. Electrif. 2022, 8, 2874–2883. [Google Scholar] [CrossRef]
- Wu, D.; Fei, W.; Luk, P.C.K.; Xia, B. Design considerations of outer-rotor permanent magnet synchronous machines for in-wheel electric vehicle applications using particle swarm optimization. In Proceedings of the 7th International Conference on Power Electronics, Machines and Drives (PEMD), Manchester, UK, 8–10 April 2014. [Google Scholar] [CrossRef]
- Gundogdu, T.; Zhu, Z.-Q.; Mipo, J.-C. Analysis of coil pitch in induction machines for electric vehicle applications. IET Electr. Power Appl. 2020, 14, 2525–2536. [Google Scholar] [CrossRef]
- Tumbek, M.; Kesler, S. Design and implementation of a low power outer-rotor line-start permanent magnet synchronous motor for ultra-light electric vehicles. Energies 2019, 12, 3174. [Google Scholar] [CrossRef]
- Raghuraman, B.; Gyllensten, T. Electric Machine Design Based on Drive Cycle Analysis. Master’s Thesis, Chalmers University of Technology, Gothenburg, Sweden, 2019. [Google Scholar]
- Ahn, J.-M.; Son, J.-C.; Lim, D.-K. Optimal design of outer-rotor surface mounted permanent magnet synchronous motor for cogging torque reduction using territory particle swarm optimization. J. Electr. Eng. Technol. 2021, 16, 429–436. [Google Scholar] [CrossRef]
- Fang, S.; Liu, H.; Wang, H.; Yang, H.; Lin, H. High power density PMSM with lightweight structure and high-performance soft magnetic alloy core. IEEE Trans. Appl. Supercond. 2019, 29, 0602805. [Google Scholar] [CrossRef]
- Ghorbani, H.R.; Majidi, B. Power Density Optimization Through Optimal Selection of PM properties in a PM-SyncRM Using FEM Analysis. In Proceedings of the 10th Annual International Power Electronics, Drive Systems and Technologies Conference (PEDSTC), Shiraz University, Shiraz, Fars, Iran, 12–14 February 2019. [Google Scholar] [CrossRef]
- Lee, T.-Y.; Seo, M.-K.; Kim, Y.-J.; Jung, S.-Y. Motor design and characteristics comparison of outer-rotor type BLDC motor and BLAC motor based on numerical analysis. IEEE Trans. ASupercond. 2016, 26, 5205506. [Google Scholar] [CrossRef]
- Zhao, J.; Zhao, S.; Yin, H.; Yang, X.; Cao, J.; Zeng, G. Design and optimization of an outer-rotor SPMSM with permanent magnets of revers step shape. In Proceedings of the 22nd International Conference on Electrical Machines and Systems (ICEMS), Harbin, China, 11–14 August 2019. [Google Scholar] [CrossRef]
- He, C.; Wu, T. Analysis and design of surface permanent magnet synchronous motor and generator. CES Trans. Electr. Mach. Sys. 2019, 3, 94–100. [Google Scholar] [CrossRef]
- Bonthu, S.S.R.; Tarek, M.T.; Choi, S. Optimal torque ripple reduction technique for outer rotor permanent magnet synchronous reluctance motors. IEEE Trans. Energy Convers. 2018, 33, 1184–1192. [Google Scholar] [CrossRef]
- Bonthu, S.S.R.; Choi, S.; Baek, J. Comparisons of three-phase and five-phase permanent magnet assisted synchronous reluctance motors. IET Electr. Power Appl. 2016, 10, 347–355. [Google Scholar] [CrossRef]
- Toliyat, H.; Waikar, S.P.; Lipo, T.A. Analysis and simulation of five-phase synchronous reluctance machines including third harmonic of airgap MMF. IEEE Trans. Ind. Appl. 1998, 34, 332–339. [Google Scholar] [CrossRef] [Green Version]
- Toliyat, H.; Xu, L.; Lipo, T.A. A five phase reluctance motor, with high specific torque. In Proceedings of the Conference Record of the IEEE Industry Applications Society Annual Meeting, Seattle, WA, USA, 7–12 October 1990. [Google Scholar] [CrossRef]
- Barrero, F.; Duran, J. Recent advances in the design, modelling and control of multiphase machines-Part 1. IEEE Trans. Ind. Electr. 2016, 63, 449–458. [Google Scholar] [CrossRef]
- Scuiller, F. Design of a 7-phase surface-mounted PM machine tooth-concentrated winding. In Proceedings of the XIII International Conference on Electrical Machines (ICEM), Alexandroupoli, Greece, 3–6 September 2018. [Google Scholar] [CrossRef]
- Zhang, H.; Zhao, B.; Gong, J.; Zu, Y.; Vu, D.-T.; Nguyen, N.-K.; Semail, E.; Moraes, T.-J. Torque optimization of a seven-phase Bi-harmonic PMSM in healthy and degraded mode. In Proceedings of the 22nd International Conference on Electrical Machines and Systems (ICEMS), Harbin, China, 11–14 August 2019. [Google Scholar] [CrossRef] [Green Version]
- Scuiller, F.; Becker, F.; Zahr, H.; Semail, E. Design of a Bi-harmonic 7-phase PM machine with tooth-concentrated winding. IEEE Trans. Energy Conv. 2020, 35, 1567–1576. [Google Scholar] [CrossRef] [Green Version]
- Ghorbani, H.; Moradian, M.; Benbouzid, M. On the Optimal Selection of Flux Barrier Reconfiguration for a Five-Phase Permanent Magnet Assisted Synchronous Reluctance Machine for Low-Torque Ripple Application. Electronics 2022, 11, 41. [Google Scholar] [CrossRef]
- Wang, J.; Qu, R.; Zhou, L. Dual-rotor multiphase permanent magnet machine with harmonic injection to enhance torque density. IEEE Trans. Appl. Supercond. 2012, 22, 5202204. [Google Scholar] [CrossRef]
- Jussila., H.; Salminen, P.; Niemela, M.; Pyrhonen, J. Guidelines for designing concentrated winding fractional slot permanent magnet machines. In Proceedings of the International Conference on Power Engineering, Energy and Electrical Drives, Setubal, Portugal, 12–14 April 2007. [Google Scholar] [CrossRef]
- Martinez, D. Design of a Permanent-Magnet Synchronous Machine with Non-Overlapping Concentrated Windings for the Shell Eco Marathon Urban Prototype. Master’s Thesis, Royal Institute of Technology (KTH), Stockholm, Sweden, 2012. [Google Scholar]
- Common Artemis Driving Cycles (CADC)-Emission Test Cycles. Available online: https://dieselnet.com/standards/cycles/artemis.php (accessed on 1 December 2018).


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Winding Layers | Single | Double |
|---|---|---|
| Fundamental winding factor (kw) | high | low |
| End Windings | long | short |
| Eddy Current | high | low |
| Over-load Torque Capability | high | low |
| Back-EMF Harmonics | high | low |
| Torque Ripple (TRipple) | high | low |
| Quantity | Sym. | Value | Unit |
|---|---|---|---|
| Num. Phases | m | 7 | --- |
| Rated Voltage | Vn | 120 | V |
| Rated Current | In | 70 | A |
| Rated Speed | nr | 1500 | rpm |
| Motor Length | LM | 100 | mm |
| Stator Outer Diameter | DSO | 135 | mm |
| Stator Slot Depth | LSSD | 25 | mm |
| Rotor Outer Diameter | DRO | 165 | mm |
| Rotor Back Iron | DRBI | 10 | mm |
| Axle Diameter | DA | 55 | mm |
| Num. Stator Slots | Ns | 42, 28, 21, 14 | --- |
| Num. Rotor Poles | Np | 6 | --- |
| Ratios of Ns/mNp | q | 1, ⅔, ½, ⅓ | --- |
| Air-gap Length | Lg | 1 | mm |
| Stator Tooth Width | WST | 5 | mm |
| Stator Slot Opening | LSO | 2 | mm |
| Stator Tooth Tip Depth | LTTD | 1 | mm |
| PM Length | LPM | 50 | ° |
| PM Thickness | WPM | 4 | mm |
| PM Type | --- | N42SH | --- |
| Steel Type | --- | M400-50A | --- |
| Parameter | Model-I | Model-II | Model-III |
|---|---|---|---|
| X1 (mm) | 2.5 | 0 | 0 |
| X2 (mm) | 3 | 5 | 4.5 |
| X3 (°) | 45 | 5 | 45 |
| TAvg (Nm) | 96.2 | 4.73 | 85.1 |
| TCog (Nm) | 8.5 | 0.018 | 0.26 |
| TRipple (%) | 7.8 | 8.53 | 1.7 |
| Eff. (%) | 88.5 | 22.94 | 86.75 |
| PF | 0.9 | 0.18 | 0.82 |
| B-EMF (V) | 114.7 | 8.2 | 67.2 |
| Vehicle Properties | Value |
|---|---|
| Mass (kg) | 80 |
| Rolling Resistance Coefficient | 0.005 |
| Air-Density (kg/m3) | 1.225 |
| Frontal Area (m2) | 1.5 |
| Drag Coefficient | 0.26 |
| Wheel Radius (m) | 0.3 |
| Mass Correction Factor | 1.04 |
| Motoring (M) Torque Ratio | 1 |
| Generating (G) Torque Ratio | 1 |
| Drive Cycle | Urban | Rural | M. Way | |
|---|---|---|---|---|
| Data | Value | Value | Value | Unit |
| Time | 991 | 1080 | 1066 | s |
| Distance | 4.9 | 17.3 | 28.75 | km |
| Avg. Speed | 17.7 | 57.5 | 96.9 | km/h |
| Max. Speed | 57.3 | 111.1 | 131.4 | km/h |
| Avg. Efficiency | 71.65 | 85.2 | 82.33 | % |
| Input Energy | 80.71 | 558.5 | 2291.3 | Wh |
| Output Energy | 13.53 | 11.4 | 7.54 | Wh |
| M. Energy | 60.19 | 478.3 | 1887.4 | Wh |
| G. Energy | 22.17 | 16.35 | 10.3 | Wh |
| Total Loss | 29.17 | 85.1 | 406.6 | Wh |
| Copper Loss | 24.48 | 66.4 | 369.9 | Wh |
| Iron Loss | 2.54 | 11.04 | 23.99 | Wh |
| Magnet Loss | 0 | 0 | 0.02 | Wh |
| Mechanical Loss | 2.15 | 7.64 | 12.7 | Wh |
| M. Operation | 77.8 | 91.2 | 94.5 | % |
| G. Operation | 22.2 | 8.8 | 5.53 | % |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ghorbani, H.; Moradian, M.; Benbouzid, M. Optimized Torque Performance of a 7-Phase Outer-Rotor Surface-Mounted Permanent Magnet Synchronous Machine for In-Wheel E-Motorcycle Application. Electronics 2022, 11, 3192. https://doi.org/10.3390/electronics11193192
Ghorbani H, Moradian M, Benbouzid M. Optimized Torque Performance of a 7-Phase Outer-Rotor Surface-Mounted Permanent Magnet Synchronous Machine for In-Wheel E-Motorcycle Application. Electronics. 2022; 11(19):3192. https://doi.org/10.3390/electronics11193192
Chicago/Turabian StyleGhorbani, Hamidreza, Mohammadreza Moradian, and Mohamed Benbouzid. 2022. "Optimized Torque Performance of a 7-Phase Outer-Rotor Surface-Mounted Permanent Magnet Synchronous Machine for In-Wheel E-Motorcycle Application" Electronics 11, no. 19: 3192. https://doi.org/10.3390/electronics11193192