
Compromise Multi-Criteria Selection of E-Scooters for the Vehicle Sharing System in Poland


1
Institute of Management, University of Szczecin, Aleja Papieża Jana Pawła II 22A, 70-453 Szczecin, Poland
2
Technical Secondary School of Economics in Szczecin, 70-236 Szczecin, Poland
*
Author to whom correspondence should be addressed.
Energies 2022, 15(14), 5048; https://doi.org/10.3390/en15145048
Submission received: 5 June 2022
/
Revised: 5 July 2022
/
Accepted: 6 July 2022
/
Published: 11 July 2022
(This article belongs to the Special Issue Sustainable Shared Mobility: Current Status and Future Prospects)
Abstract
:In Poland, there is a high ratio of private transport and unfavorable patterns of daily commuting. These patterns can be changed by introducing comfortable and eco-friendly vehicles, such as e-scooters and e-bikes. At the same time, the development of the e-micromobility-based vehicle sharing services market is developing. The aim of the article is to analyze selected e-scooters available on the Polish market and to identify the most useful vehicles from two opposing perspectives, i.e., the potential customer and owner of the vehicle sharing system. The PROSA GDSS (PROMETHEE for Sustainability Assessment—Group Decision Support System) method and the graphical representation of GAIA (Geometrical Analysis for Interactive Assistance) were used to search for a compromise and balance between the needs of the indicated stakeholders. The results of the methods used were compared with the results of the PROMETHEE GDSS method, which does not take into account the balance between the stakeholders and allows for a strong compensation of the assessments of decision makers. The conducted research allowed indicating the optimal e-scooter to meet the needs of both decision makers, and it is the JEEP 2xe Urban Camou. Both the sensitivity analysis and the solution obtained with the use of the PROMETHEE GDSS method confirmed that it is the optimal alternative, the least sensitive to changes in criteria weights and changes in the decision makers’ compensation coefficients.
1. Introduction
The development of the automotive industry significantly affects not only the comfort of travel for motorists, but also has a significant impact on the Earth. The amount of exhaust fumes emitted into the environment is constantly increasing. This is a huge problem in the further progress of civilization, having a destructive influence on the air, soil, and atmosphere. The Organization of the Petroleum Exporting Countries [1] estimates that the number of passenger cars will increase from nearly 870 million in 2009 to 1.76 billion in 2035. These data show how important it is to popularize alternative means of transportation. In the case of Poland, it is most important in the case of larger cities such as Warsaw, Poznań, Gdańsk, Szczecin, Katowice, Kraków, or Wrocław. These cities are particularly vulnerable to vehicle exhaust fumes and the associated environmental pollution. Due to the structure of the Polish energy mix, in the winter season the pollution is additionally combined with the burning of coal in order to heat houses and generate energy in coal-fired power plants. All these factors create smog which is harmful to both human health and the environment.
The reduction of greenhouse gas (GHG) emissions resulting from the combustion of crude oil and coal is the first major step in meeting the requirements imposed by the European Union (EU) to combat climate change. Continuous automotive progress and the related greater demand for crude oil and gas, until a few years ago, accounted for approx. 60% of total energy consumption and GHG emissions in transport [2].
Passenger transport requires decisive steps to meet the requirements imposed by the EU. In the light of the European Green Deal, the key task is to make Europe the first climate neutral continent [3]. The decarbonization of the transport sector is expected to contribute to the achievement of an 80% reduction in GHG emissions by 2050 [4]. EU countries impose restrictions on the movement of older, substandard means of transport in designated zones, e.g., in cities such as Berlin or Paris. In Poland, these standards are also beginning to take shape and are described in the Act on electromobility and alternative fuels [5]. This is important due to the fact that Poland has the second largest percentage of cars over 10 years of age (approx. 73%) in the EU [6]. This impacts significantly the number of exhaust gases emitted into the environment [7]. Older cars, which do not have a Diesel Particulate Filter, emit much more soot, i.e., solid particles, and if they enter the circulatory or respiratory system, they can cause cancer.
Another important factor determining the need to use alternative means of transport is the difficult access to raw materials necessary in the transport process, such as crude oil, its derivatives, and gas. So far, Russia has been the main supplier of both gas and crude oil to Poland. Due to the war in Ukraine and the sanctions imposed on Russia as a result of the war, the prices of oil and gas have increased significantly. The lack of independence in obtaining such important raw materials has caused unstable fuel prices throughout Europe, including in Poland.
The context mentioned above indicates the need to change the structure of means of transport used in urban traffic. A potential direction for such a change is the development of electro-micromobility (e-micromobility) and the use of e-scooters and e-bikes, implementing the idea of green cities [8]. Interest in such vehicles on the part of individual users has been growing dynamically in recent years [9]. There are also more and more rental companies of this type of vehicles in larger cities [10]. The advantage of using e-bikes and e-scooters is the relief of the vehicle user compared to a traditional bicycle or scooter. Thanks to the use of electric means of microtransport, you can cover a longer distance without losing your strength and park these vehicles practically anywhere (which is not possible in the case of cars) [11]. The use of e-vehicles additionally allows you to travel from several to several dozen kilometers on a single battery charge. E-bikes and e-scooters are also an ideal choice for people with health problems who want to gradually start playing sports [9,12]. The hybrid ability to ride these vehicles allows you to switch to assist mode in order to regain strength. Manufacturers of vehicles such as e-bikes and e-scooters are releasing newer and newer functionalities on the market, e.g., the ability to synchronize with a smartphone and share the distances covered with others. Using e-bikes and e-scooters to travel to and from work, users do not waste time waiting in traffic jams. In large, crowded cities, this is a particularly important advantage. In addition, people using e-bikes and e-scooters to travel to work do not waste energy to cover the distance, which would be the case with a traditional bicycle or scooter. Although the environmental benefits of using e-micromobility are debatable, there is a consensus among researchers that switching from cars and motorcycles to e-micromobility would result in an overall reduction in GHG emissions [13]. A natural way of introducing e-micromobility in cities are, in turn, sharing stations, which make vehicles available to users quickly and cheaply, while also providing other benefits, such as creating jobs, stimulating economic growth, etc. [14]. In the case of such sharing systems, it is important to respect the points of view of all stakeholders, i.e., both investors and users [15]. Due to the wide availability on the Polish market and frequent use by sharing stations in Poland [16], this study considers e-scooters as the primary means of e-microtransport in cities.
The aim of the article is to analyze selected e-scooters available on the Polish market and to recommend the most useful vehicles of this type. The practical contribution of the article is to consider e-scooters both from the perspective of the individual user as well as the owner of the vehicle sharing system (VSS). Each of these stakeholders has different preferences when choosing a vehicle (fleet of vehicles). It is important to find a compromise between the owner and the VSS customer so that each is satisfied with the vehicle they use. The multi-criteria decision aid (MCDA) method called PROMETHEE for Sustainability Assessment—Group Decision Support System (PROSA GDSS) was used to identify e-scooters taking into account the preferences of both stakeholders [17]. PROSA GDSS supports groups decisions by rewarding compromise solutions and punishing unbalanced solutions between stakeholders. The use of this method in the context of seeking a compromise between two contradictory perspectives (VSS customer and owner) is a methodological contribution of the article. The resulting compromise was visualized graphically using the PROSA Geometrical Analysis for Interactive Assistance (GAIA) plane. The article is divided into seven sections. Section 2 provides an overview of contemporary research related to micromobility and e-micromobility. Section 3 discusses the research procedure and the methods used. The research results are presented in Section 4 and the results are discussed in Section 5. Section 6 contains managerial and environmental implications, and the article’s conclusions are presented in Section 7.
2. Literature Review
In recent years, the interest in research on micromobility and e-micromobility has grown significantly. This is confirmed by the dynamically growing number of research papers on this subject [18,19]. MCDA methods are also used more and more often in such studies, both in the case of classic micromobility and e-micromobility. Tian et al. [20] developed a decision support framework for bike-sharing programs. The framework is based on the fuzzy BWM and MDM methods, which were used to weigh the criteria, and the MULTIMOORA method, with which preferences were aggregated. Karolemeas et al. [21] prepared an index based on the AHP method for the planning of bicycle routes in the existing road network. In turn, in the studies by Kurniadhini and Roychansyah [22], Kabak et al. [23], Eren and Katanalp [24], and Guler and Yomralioglu [25], the potential locations of the bike-sharing system stations were considered and assessed. In the aforementioned studies, the aggregation of multi-criteria preferences was carried out using various MCDA methods, which were, respectively: SMCA, MULTIMOORA, VIKOR, and TOPSIS. In each of these studies, the AHP method was used to obtain the criteria weights, and in the publication by Guler and Yomralioglu [25], the criteria were additionally weighed using the BWM and fuzzy AHP methods. The above-mentioned articles dealt with decision-making problems related to conventional bikes, while the following papers mainly related to e-micromobility. Fazio et al. [26] used the SMCA method to study the adjustment of the road network to the needs of e-scooters. Kalakoni et al. [27] developed an environment matching index for different types of micromobility based on the AHP method. Using the developed index, they adjusted the appropriate micromobility and e-micromobility vehicles for individual areas. Torkayesh and Deveci [28] proposed a TRUST-based location assessment framework for battery swapping stations for e-scooters. Tang and Yang [29] used the interval-valued Pythagorean fuzzy preference relation to choose a supplier of e-bikes recycling. Deveci et al. [30] dealt with the issue of safety assessment of e-scooters using the fuzzy LAAW and qROFS Einstein WASPAS methods. Bajec et al. [15] using a set of DAHP and DEA methods selected the supplier of the e-bike-sharing system. Wankmüller et al. [31] used the BWM method to identify criteria relevant to the selection of e-micromobility vehicles for mountain rescue. Finally, Sałabun et al. [32] using the COMET method chose e-bikes for sustainable urban transport. More detailed applications of MCDA methods in research on micromobility and e-micromobility are presented in Table 1.
When analyzing Table 1, it is easy to notice that there are few publications in which vehicles belonging to the e-micromobility category were assessed in a multi-criteria evaluation. Such issues appear only in the work of Sałabun et al. [32], where e-bikes were considered. The works of Wankmüller et al. [31] and Bajec et al. [15] are also partially similar to this topic. The first of these articles analyzed the potential criteria for selecting various e-micromobility solutions. In the second article, in the context of choosing the e-bike-sharing system supplier, there were also criteria that directly refer to the vehicles offered by the suppliers. Therefore, a research gap is visible in the topic of selecting e-scooters for the needs of individual users or VSSs. The second research gap is that few studies take into account the different perspectives represented by individual stakeholders. Only in the articles by Tian et al. [20], Tang and Yang [29], and Deveci et al. [30] was a group assessment approach used. Nevertheless, in each of these articles, the decision was the result of the views of field experts (entrepreneurs, academic professors, officials), and to the best of our knowledge, in the context of e-micromobility, no study has been conducted so far taking into account the contrary views of VSSs customers and owners.
3. Materials and Methods
3.1. Research Approach
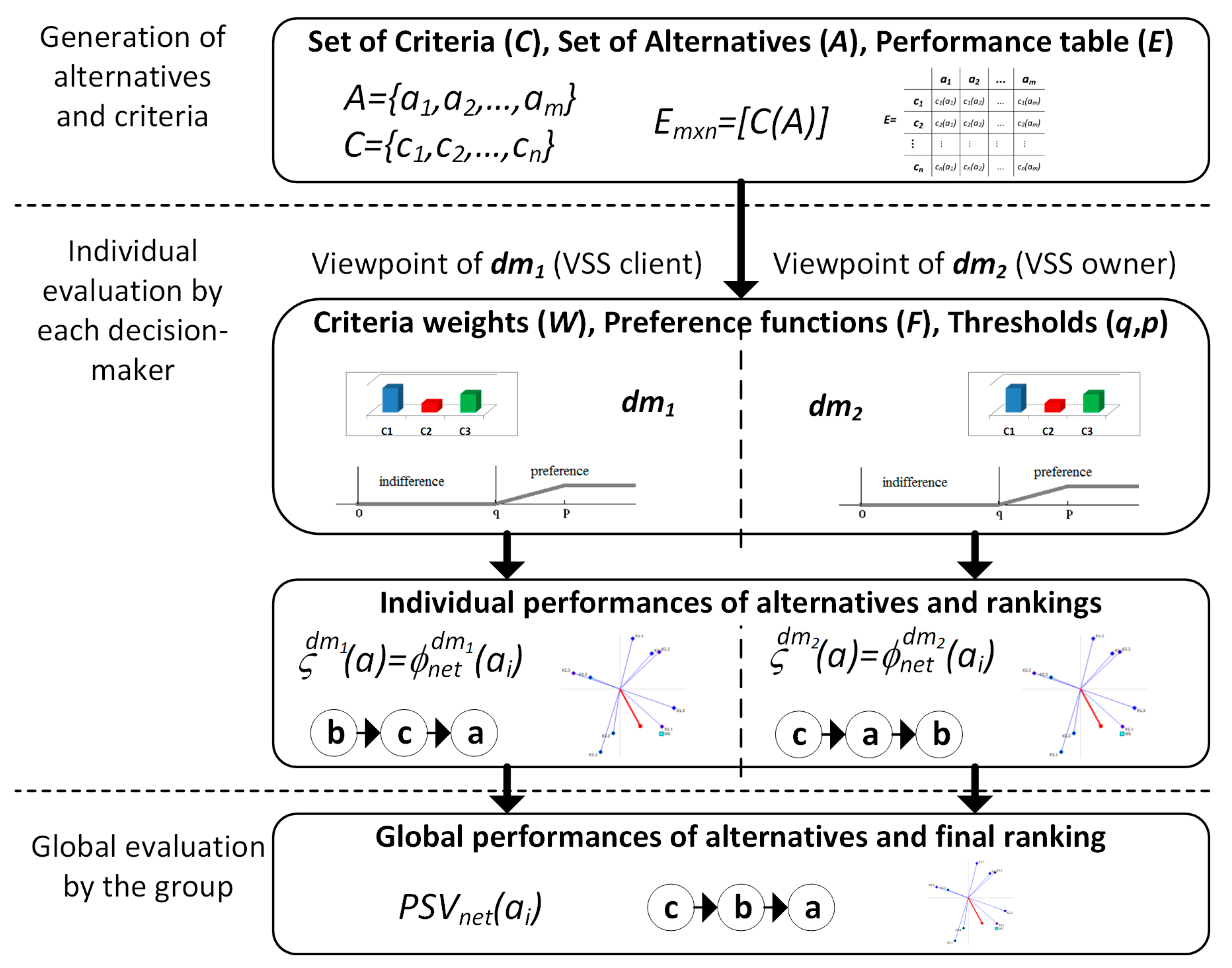
The research scheme was based on the PROSA GDSS method, consisting of three stages [17]:
- generation of alternatives and criteria,
- individual evaluation by each decision maker,
- global evaluation by the group.
In the first stage, a set of decision alternatives is defined, containing the acceptable alternatives (variants), from among which the alternative that best satisfies the decision makers is selected. This stage also specifies a set of criteria for evaluating alternatives . On the basis of the sets and , the performance table is built, containing the performance of alternatives based on criteria. This matrix is the basis for the assessment for each of the decision-makers (stakeholders, experts) belonging to the set .
The second stage is an individual assessment of the various alternatives by each of the decision makers. In this stage, you can use one of the methods belonging to the PROMETHEE / PROSA families. In the e-scooters study, the PROMETHEE II method was used due to the fact that it is computationally simple and, at the same time, sufficient to aggregate the criteria for the purposes of this study. The result of this stage are the values of obtained for each alternative, separately for individual decision makers.
In the third stage, the values are aggregated into a group assessment taking into account a compromise or balance between decision makers. An aggregation is made using the PROSA-C method, and the result are the values obtained for each of the alternatives considered. Both in the second and third stage, numerical studies can be supported by graphical analyses using the PROMETHEE GAIA method in the second stage and PROSA GAIA in the third stage. The diagram of the research procedure is presented in Figure 1.
3.2. PROMETHEE II Method
The second stage of the proposed research approach is based on the PROMETHEE II method [33,34] in the variant using the single criterion net flow. Four steps are performed in this stage.
- Step 1. Calculating the deviations based on pair-wise comparisons.
In this step, all alternatives from set are compared in pairs in terms of successive criteria and for each such comparison the deviation is determined, according to Formula (1):
where is the rating/performance of the alternative in terms of the criterion.
- Step 2. Applying the preference functions.
For each k-th criterion, preference functions are selected, allowing for the conversion of the deviation to the normalized preference value , according to Formula (2):
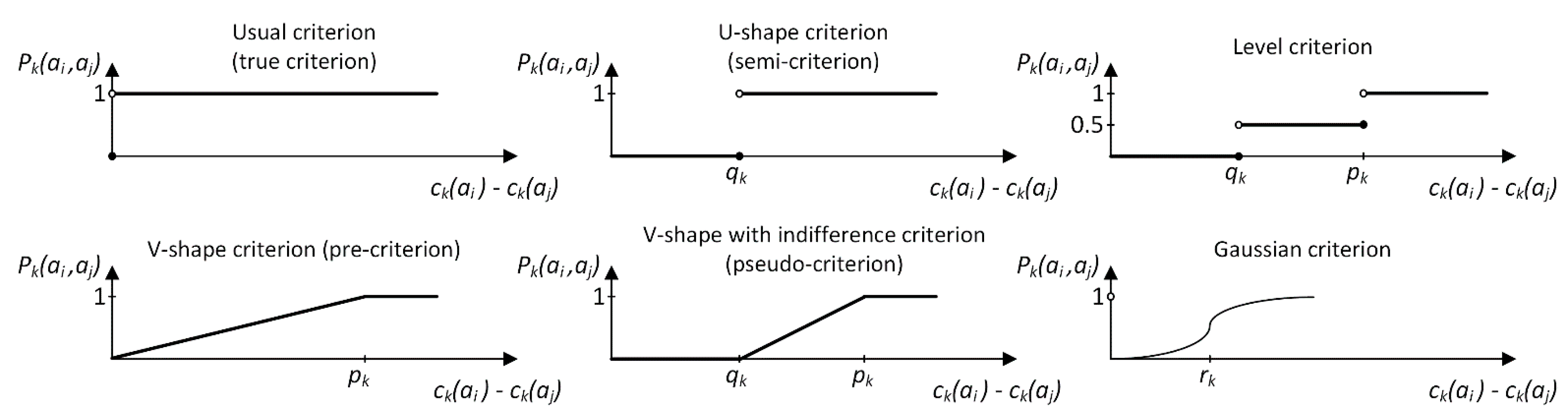
Six different preference functions as shown in Figure 2 can be used in this step.
These functions are described by Formulas (3)–(8), where the following thresholds are used in selected functions: —indifference, —preference, —Gaussian.
- Usual criterion (true criterion) (3):
- 2.
- U-shape criterion (semi-criterion) (4):
- 3.
- V-shape criterion (pre-criterion) (5):
- 4.
- Level criterion (6):
- 5.
- V-shape with indifference criterion (pseudo-criterion) (7):
- 6.
- Gaussian Criterion (8):
- Step 3. Calculating net outranking flows for individual criteria.
Based on the preference value , the net outranking flow of alternative over each other alternative for the k-th criterion is calculated, using Formula (9):
The values allow you to order the alternatives separately for each criterion.
- Step 4. Calculating the global net outranking flow.
The global net outranking flow for each of the alternatives is determined on the basis of Formula (10):
where is the weight of the k-th criterion. Weights are normalized (). The obtained values of are the final solution according to the PROMETHEE II method, and in the PROSA GDSS method they are the results obtained by each of the decision makers separately. Therefore, for each k-th decision-maker and for the i-th alternative, there is an assignment of .
3.3. PROSA-C Method for GDSS
The last, third stage is to use the PROSA-C method [35] in order to identify alternatives that represent the best compromise between decision makers. At this stage, the set of criteria is replaced by the sequence set . Each k-th sequence corresponds to the results of the evaluation of alternatives by the k-th decision-maker and is composed of the values determined in the second stage, i.e., . The performance table is built on the basis of the sets and . The PROSA-C method for GDSS consists of eight steps, with the initial four steps being based on the PROMETHEE II method.
- Step 1. Calculating deviations based on pair-wise comparisons.
The results obtained in the second stage by the individual alternatives are compared for each k-th decision maker. For each comparison, the deviation is determined, according to Formula (11):
- Step 2. Calculating the value of the preferences.
To transform the deviation into the normalized preference value , the V-shaped criterion is used (12):
The expression can only be true if the PROSA-C or PROSA-G method with the compensation factor was used in the second PROSA GDSS stage.
- Step 3. Calculating net outranking flows for individual criteria.
The net outranking flow of the alternative over each other alternative for the k-th decision maker is calculated, based on Formula (13):
- Step 4. Calculating the global net outranking flow.
For each alternative, a global net outranking flow is computed. The calculations are based on the individual outranking flows of each k-th decision-maker and its weight , according to Formula (14):
- Step 5. Analysis of the criteria compensation relationship.
Determining the values and allows investigating the compensation relations that exist between the alternatives.
- The balance relation (≈)—occurs when and means that the evaluation of the alternative ai by the k-th decision maker is balanced in relation to the other decision makers.
- The relation of being compensated (Cd)—occurs when and means that the low evaluation of the alternative ai by the k-th decision maker is compensated for by the remaining decision makers ().
- Compensation relation (Cs)—occurs when and means that the high evaluation of the alternative ai by the k-th decision maker compensates for the assessments of other decision makers ().
The occurrence of the Cd or Cs relation means that the evaluation of the alternative by the k-th decision maker is not balanced in relation to the other decision makers. The << and >> operators denote the contractual relations as “much less than” and “much greater than”, expressing a subjective view of a large difference between the compared values. The operator expresses the subjective view that the values on both sides of the operator can be considered “approximately equal”. The analysis of the compensation relation may be a hint regarding the expected values of the compensation factor . If the decision-maker wants to increase the influence of the balance on the obtained solution, then higher values can be assumed.
- Step 6. Calculating absolute deviations for decision makers’ assessments.
The value of the absolute deviation is determined separately for each decision maker and for each alternative, according to Formula (15):
where is the compensation factor for the k-th decision maker. In practice, is a specific weight, and is the weighted distance of the global net outranking flow from the net outranking flow obtained for the k-th decision maker .
- Step 7. Calculating individual PROSA values for decision makers’ evaluations.
Individual PROSA values are determined on the basis of Formula (16):
- Step 8. Calculating the global net PROSA values.
The net value of PROSA is determined using Formula (17):
3.4. GAIA Analysis
An important aspect related to the application of the PROMETHEE and PROSA methods is the GAIA analysis. Formally, it is a method of multi-criteria decision analysis, dealing with descriptive issues [36]. GAIA aims to provide a complete graphic representation of a decision problem, thanks to which it enables the analysis of the obtained solution and indication of directions for its possible improvement. Therefore, GAIA allows for grasping the decision problem and its solution from a descriptive perspective. It gives the decision maker a clear description of decision alternatives and their consequences [34,37].
In the PROSA GDSS method, the GAIA analysis can be used in stages two and three. In this study, in the second stage, it is based on the values of (PROMETHEE GAIA) and is used to analyze alternatives in terms of criteria. In the third stage, the GAIA analysis is based on the values of (PROSA-C GAIA), and the analysis concerns the assessments of decision makers. Both PROMETHEE GAIA and PROSA-C GAIA are based on the same procedure and differ only in the input data [38]. The GAIA method can be divided into six steps.
- Step 1. Construction of the performance matrix.
In the performance matrix with dimensions (for criteria) or (for decision makers), the alternative is represented by the row . Each row corresponds to a point in space (in the case of criteria) or (in the case of decision makers), so the row contains the coordinates of the point . The performance matrix for PROMETHEE GAIA is presented in expression (18), and for PROSA-C GAIA it is presented in expression (19):
- Step 2. Calculating the variance-covariance matrix and determining the GAIA plane.
The calculation of the variance-covariance matrix is intended to reduce the space () to a 2-dimensional plane. In this operation, Formula (20) is used:
where is the coefficient with a positive integer value, is the variance-covariance matrix, and is the transportation of the matrix. For matrix , the set of eigenvalues or is determined. The plane is marked by the eigenvectors , corresponding to the two largest eigenvalues from the set ( and ).
- Step 3. Finding coordinates of alternatives.
Each point represents the i-th alternative in the plane . The coordinates of these points are determined according to Formula (21):
- Step 4. Determining the coordinates of the criteria/decision makers’ vectors.
For criteria, each vector represents the k-th criterion on the plane. In turn, in the case of decision makers, each vector represents the views of the k-th decision maker. The tails of these vectors are at the origin of the coordinate system. The vector coordinates are determined according to Formulas (22) and (23):
where is the k-th row of the identity matrix with dimensions (for criteria) or (for decision makers).
- Step 5. Determining the direction of searching for a compromise solution.
The vector determining the compromise solution is calculated according to Formula (24):
where is the vector of the normalized weights of criteria () or decision makers ().
- Step 6. Calculating information loss.
Reducing the dimensionality of the space () to the plane causes that some information about alternatives and criteria or the views of decision makers is lost. The amount of information transferred to the 2-dimensional space is represented by the value calculated using Formula (25) or Formula (26), for criteria or decision makers, respectively:
The GAIA plane provides graphical information on alternatives and criteria or views of decision makers. If the criteria vectors (or decision makers vectors ) point in the same direction, it means that the criteria they represent (views of decision makers) similarly affect the global assessment of alternatives. While the opposite turns of vectors indicate a contradiction of preferences or views. On the other hand, the orthogonal arrangement of vectors means a lack of dependence. The length of a vector is the strength of the influence of a given criterion (decision maker) on the global assessment of alternatives. The further in the plane the point representing the i-th alternative is in the direction defined by the vector, the more the criterion (decision-maker) represented by the vector supports this alternative. The same principle applies to the vector representing a compromise solution.
4. Results
4.1. Collection of Alternatives and Criteria, Performance Table of Alternatives
The first stage of the study was to select decision alternatives and evaluation criteria. The considered alternatives were the most popular e-scooters in Poland. The vehicles for analysis were selected on the basis of information about the most frequently purchased e-scooters. This information was obtained from the three largest stores on the Polish market offering electronic products [39]. The ten most popular vehicles were selected from each store. As some vehicles were included in the top 10 in more than one store, the result was a list of 21 e-scooters that created a set of decision-making alternatives A. It is worth noting that the selection of vehicles takes into account the specificity of the Polish market, because e-scooters include three vehicles by Polish manufacturers (Motus and Skymaster).
The selection of criteria was based on literature sources. As the literature shows a shortage of research on the multi-criteria price of e-scooters, the criteria used in similar decision problems concerning e-bikes and e-micromobility in general were analyzed [15,31,32,40,41]. Moreover, publications on a similar problem of choosing an electric car [42,43,44,45,46]. As the criteria in the articles cited are not strictly aligned with the evaluation of e-scooters, only selected criteria were considered in this study. Table 2 contains the criteria selected for the evaluation of e-scooters along with references to the literature.
The analysis of Table 2 shows that not all criteria are based on the literature. In particular, Table 2 defines several criteria closely tailored to the evaluation of e-scooters and related to their specific characteristics. These are criteria for tire diameter, vehicle communication with the mobile application, cruise control, pedestrian mode, presence of a Kinetic Energy Recovery System (KERS) and Electric Anti-lock Braking System (e-ABS), used suspension and braking systems, as well as hill climbing ability and the number of gears (speed modes). Some of the criteria are binary, so they refer to whether a given system/feature is present in the vehicle. Binary criteria occur when, on the basis of information from vehicle manufacturers, it would be difficult to determine which vehicles have for a given system, one that is developed more or less than another. The selected criteria are described using a point scale—these are the criteria for which the quality can be differentiated on the basis of information provided by manufacturers. For example, the braking system can be based on fender, electric, drum, or disk brakes. Depending on the components used in the braking system, it was assigned an appropriate score. In the same way, the use of disk and drum brakes was rewarded, as each of these types of brakes has certain advantages. Disk brakes are more efficient and have more stopping power, but wear faster and require more maintenance than drum brakes. A point scale is also used for the protection rating, depending on the level of protection of the vehicle against solids and liquids. In the case of the price, the lowest amount was selected from among the prices in the three stores from which information on vehicle popularity was obtained. Temporary trade promotions were not taken into account, taking into account only base prices. The underlying criteria (e.g., price, battery charging time, etc.) are described in terms of natural values. Most of the criteria are stimulants, so they are profit criteria [47]. Destimulants, i.e., cost criteria are battery charging time, weight, and price. It should be clarified that the literature often uses the criterion of maximum speed, which, however, was abandoned in this study. The resignation from this criterion is a result of the legal provisions in force in Poland, limiting the maximum permissible speed of e-scooters to 20 km/h [48]. All vehicles under consideration reach this speed and are equipped with a lock that prevents them from reaching a higher speed. Therefore, the use of the maximum speed criterion in the current legal situation in Poland does not make sense. In this way, a list of 18 evaluation criteria constituting the set of C criteria was obtained and is shown in Table 2.
4.2. Models of Stakeholder Preferences
As noted in Section 3.1, the two stakeholders were, respectively:
- dm1—VSS customer, i.e., a potential e-scooter user,
- dm2—VSS owner, making e-scooters available to users.
Of course, the interests and views of these stakeholders are in conflict. The user who rents an e-scooter is primarily interested in safety and comfort when using the vehicle. Therefore, the criteria directly affecting the safety and comfort of driving are of great importance to users: the braking system (including brakes and e-ABS), suspension, or, to a lesser extent, the diameter of the tires. The braking system allows you to stay safe in sudden, unexpected situations while driving. In turn, the suspension system and the diameter of the tires affect the comfort of driving and negotiating unevenness as well as the ability to climb curbs. Equally important are criteria regarding the comfort of use, such as sufficient range, gradeability, number of gears, and cruise control. The range should be sufficient for the needs of a typical user. According to various studies published in the literature, shared e-scooters users cover about 2–4 km in one trip [70,71], and according to other studies, it may even be more than 8 km [72,73]. Taking into account that sometimes you still need to return (e.g., travel from home to work, and then home from work), it may even be over 16 km. It should also be taken into account that as the battery degrades or at lower temperatures, the range will decrease. The ability to climb steep slopes relieves users from having to push the e-scooter uphill when it has too little power to climb the hill. More gears and cruise control allow you to set the right speed and lock it, so that the user can focus on the road and any obstacles. Criteria such as vehicle weight and pedestrian mode are slightly less important. The weight of the vehicle is related to the ease of riding, e.g., in the pedestrian mode. Technical criteria such as battery capacity, engine power, load capacity (assuming that this will be a value greater than the weight of the potential user), the presence of KERS, or protection rating are much less important for the user. However, these criteria are to some (slightly) degree significant, as they are indirectly related to the gradeability, range and failure-free operation of the vehicle. Access to the e-scooter setup via the mobile app is of very little importance, as in the case of a rented e-scooter, only a few users will want to use this feature, and most often the feature will be blocked by the VSS owner. However, battery charging time and price are irrelevant to the VSS customer. The price is irrelevant as the cost of purchasing the vehicle is borne by the owner of the VSS, not the customer. Likewise, the owner of the VSS is responsible for recharging the battery and the customer will not charge it when the battery is depleted, but will simply take another vehicle.
On the other hand, for the VSS owner, the most important criteria are directly related to his actions regarding the handling of e-scooters. From this perspective, criteria such as battery capacity and charging time, KERS, as well as load capacity and protection rating are important. The greater the battery capacity, the less frequently the e-scooter needs to be delivered to the base station and charged. In turn, the longer the charging time, the longer the vehicle is out of use in VSS. For this reason, KERS is to some extent useful as it increases the time intervals between successive charges.
The load capacity should be large enough not to limit the possibility of using the vehicle to obese people, of whom there are, unfortunately, relatively many in Polish society. In turn, the protection rating is a very important criterion determining whether the vehicle must be additionally protected against unfavorable weather conditions. E-scooters are usually left outdoors and are exposed to, for example, rainfall. Therefore, an appropriate degree of protection against liquids ensures their stability of operation, regardless of rainfall. One of the most important criteria for a VSS owner is, of course, the price of the e-scooter. The criteria most important to users are also relatively important, as they are responsible for driving comfort and thus the loyalty and retention of VSS users. Engine power is much less important, which is reflected indirectly in other criteria, and a mobile app is a completely redundant function.
In addition to the weights of criteria, an important aspect of preference modeling is the selection of appropriate preference functions and associated thresholds. The use of a pre-criterion, pseudo-criterion or Gaussian criterion is recommended for quantitative criteria. However, for low grade or quality criteria, consider using a true criterion, semi-criterion, or level criterion [74]. In turn, the thresholds , and should be between the reliable values of the minimum and maximum of the k-th criterion [74,75]. Taking into account the cited guidelines, the usual preference function was used for the binary criteria and the two-fold number of gears criteria. The level criterion was used for the four-valued tire diameter and load capacity criteria and for the criteria expressed on the 4-point scales (brakes and protection rating). For the remaining criteria, the V-shaped preference functions (pre-criterion and pseudo-criterion) were used. The stakeholder preference models are presented in Table 4.
4.3. Results of E-Scooters Assessment Using the PROSA GDSS Method
Based on the models of stakeholder preferences and the table of alternative performance, individual stakeholder rankings and group rankings were generated. The value was adopted as the compensation factor for the results of the individual assessment in the group procedure. In turn, the weights of the stakeholders were set equal (). Table 5 presents the values of and ranks obtained in individual rankings, as well as the ranks and values of obtained in the GDSS procedure.
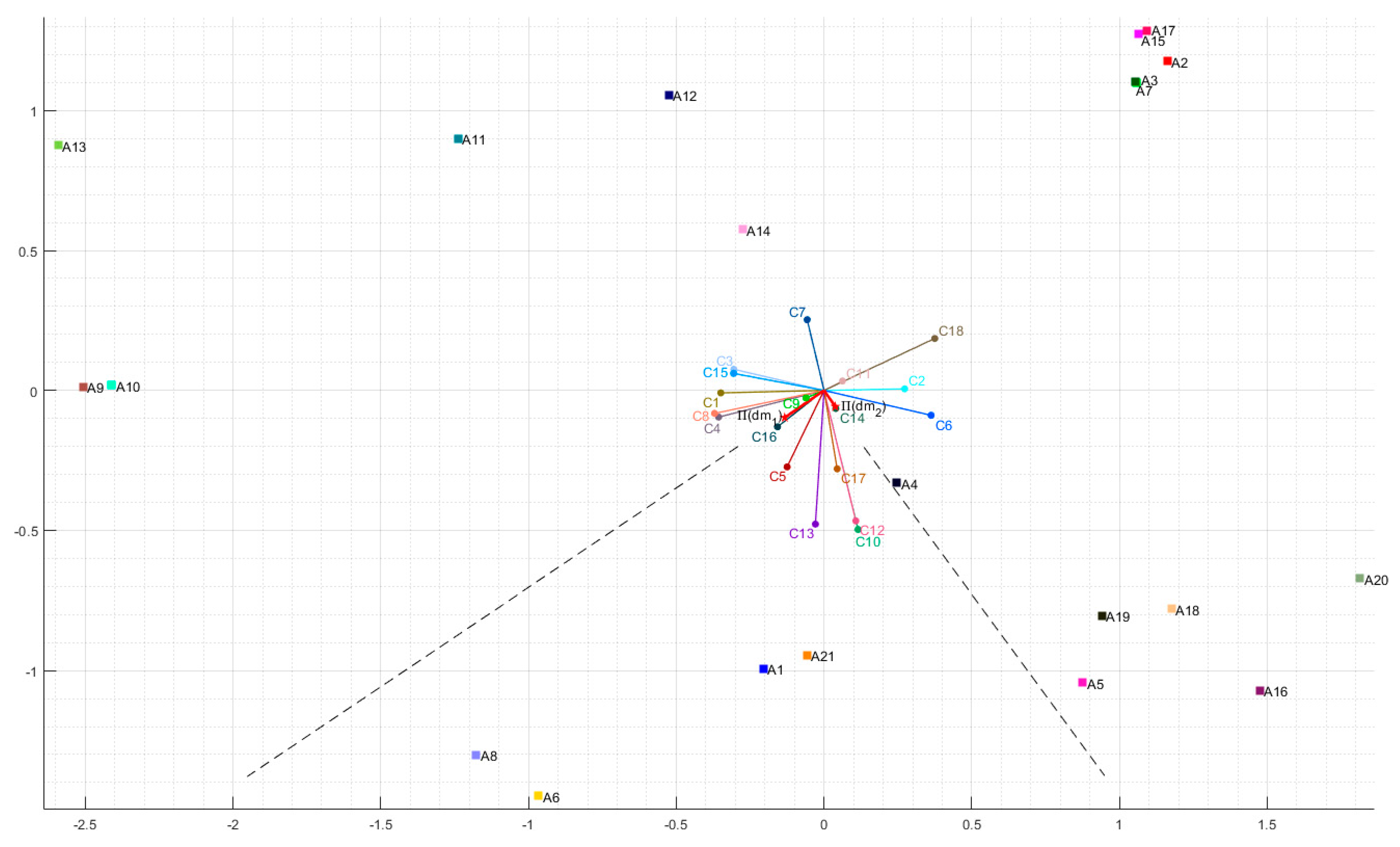
The analysis of individual rankings in Table 5 shows significant differences in the assessment of e-scooters based on the preferences of individual stakeholders. This is clearly visible on the example of the alternatives A7, A9, A13, A20, which depending on the stakeholder, occupy leading or final positions in the rankings. There is also a significant discrepancy in the case of alternatives A5, A10, A11, A14, A16, and A18, for which the difference between the ratings of the VSS owner and the VSS customer is at least eight positions. These differences are of course due to different stakeholder preferences. One can also observe alternatives that rank similarly or the same in both individual rankings. These are the alternatives A1, A3, A8, and A21. It is easy to notice that the alternatives A1, A8 and A21 occupy the leading positions in the group ranking. Moreover, the A3 and A21 alternatives in the GDSS procedure were ranked higher than it would result from their position in the individual rankings. This effect is directly related to the PROSA method, which rewards well-balanced alternatives and penalizes unbalanced ones. An example of an alternative which position has been significantly lowered in the group ranking due to a very large discrepancy in individual ranks is A7. The confirmation of most of the indicated observations can be found on the PROMETHEE GAIA plane generated for individual rankings. Due to the fact that both individual rankings are based on the same performance table, the GAIA plant with identically distributed criteria vectors and alternative points is obtained for each of the individual rankings. These solutions differ only in the vector which determines a compromise solution between the criteria. For this reason, both individual solutions are presented on the common PROMETHEE GAIA plant, shown in Figure 3.
When analyzing the GAIA plane, it should be noted that not all information was transferred from the to space. The value of , so only 65% of the information has been preserved in the two-dimensional space. Nevertheless, some valuable information can be obtained from the figure. On the GAIA plane, the support of criteria for alternatives is clearly visible. For example, criterion strongly supports the alternatives A9, A10, A13 (these vehicles have a very high battery capacity), and criterion supports the alternatives A2, A7, A15, A17, and A20 (these e-scooters have the lowest prices). In addition, it is possible to indicate the solutions most supported by individual stakeholders. The decision maker strongly supports the alternatives A6, A8, A9, A10, and A13 (the points representing these alternatives are most advanced in the direction indicated by the vector ). In turn, the decision-maker strongly supports, among others, alternatives A5, A18, A19, A20. On the GAIA plane, the dashed line marks the extension of the vectors and thus delineating the space of solutions strongly supported by both stakeholders. These solutions include A1, A6, A8 and A21, the four top group ranking alternatives. This analysis shows that the GAIA plane is a valuable carrier of descriptive information about the solution of the decision problem, even if only part of the information was transferred to the plane.
5. Discussion
5.1. Comparison of the Results of the PROSA GDSS and PROMETHEE GDSS Methods
As noted earlier, the PROSA method favors well-balanced (or sustainable) alternatives and penalizes unbalanced ones. In other words, it limits the compensation of factors (criteria, decision makers) in the decision problem. In particular, the PROSA GDSS method limits the compensation of decision makers’ assessments at the stage of aggregating individual assessments into group assessments. In this way, PROSA GDSS favors balanced alternatives, assessed at a similar level by all stakeholders.
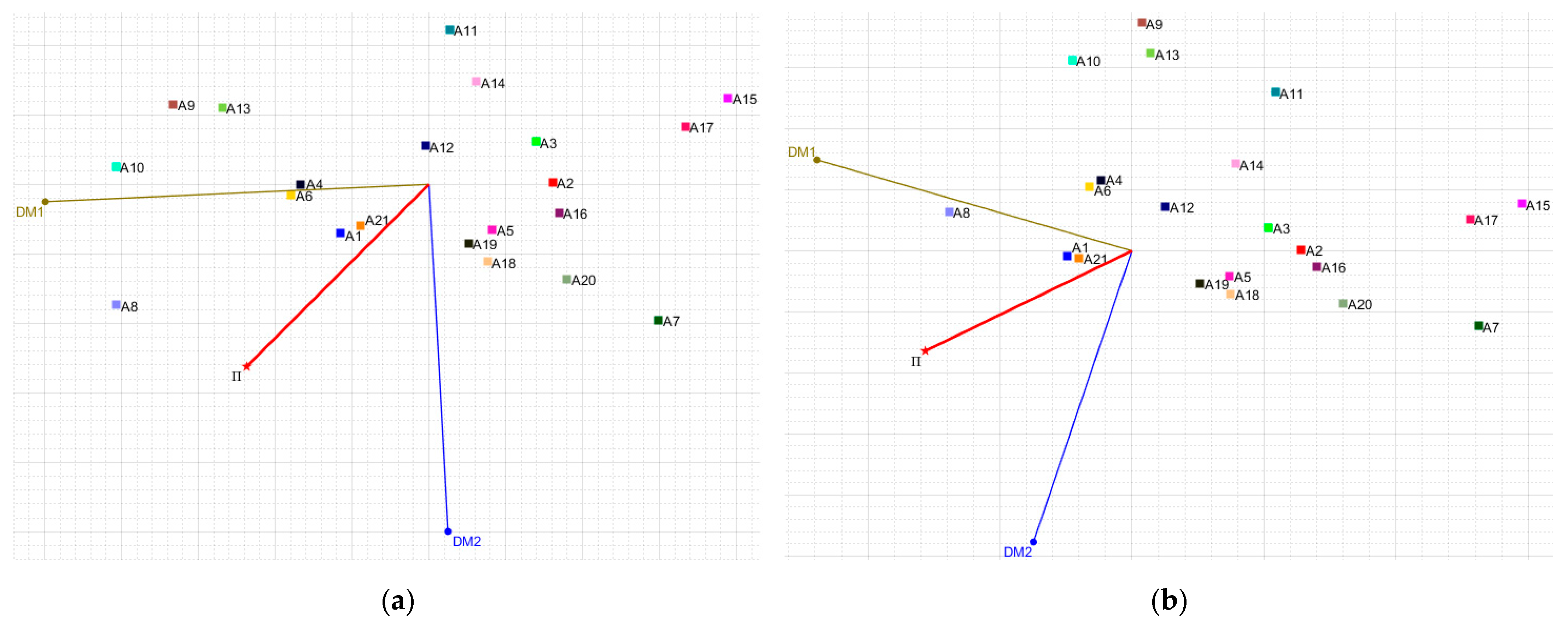
To analyze the impact of the balance-based approach on solving the decision problem, the results of the PROSA GDSS and PROMETHEE GDSS methods were compared. In accordance with the research procedure presented in Section 3.1, each of these methods was used separately at the stage of aggregating individual assessments into group assessment (PROMETHEE GDSS uses the PROMETHEE II procedure with V-shaped criterion and threshold at this stage). Table 6 presents the results of the PROMETHEE GDSS method and the results for the PROSA GDSS method, previously quoted in Table 5. On the other hand, Figure 4 contains the GAIA GDSS planes obtained using the PROMETHEE and PROSA methods (for both planes was obtained).
A comparison of the PROMETHEE GDSS and PROSA GDSS rankings indicates that taking into account the balance between decision makers and limiting compensation significantly changes the rankings of alternatives. Alternative A1, which was ranked second in the PROSA GDSS ranking, without balance (PROMETHEE GDSS ranking), was ranked fifth. In turn, alternative A21 fell from third to seventh, and A4 lost one position (from fifth to sixth). Of the top alternatives, the A8 and A6 retained their ranks. As for the other alternatives, which were penalized for the lack of balance in the PROMETHEE GDSS ranking included unbalanced alternatives, which were penalized for lack of balance in the PROSA GDSS ranking.
The differences in the rankings are clearly visible on the GAIA planes based on the PROMETHEE GDSS and PROSA GDSS methods (Figure 4). The vector determining the order of alternatives indicates that in the case of the PROMETHEE GDSS GAIA plane, the leading alternatives are: A8, A10, A9, A1, A6, etc., respectively. On the PROSA GDSS plane, the best alternatives are: A8, A1, A21, A6, A4, etc., respectively. On both GAIA planes, the vectors also correctly indicate the order of the other alternatives. Although the differences in the position of points representing alternatives on both planes of GAIA are small, the position of these points precisely describes the order of alternatives in the rankings and the support of individual alternatives by decision makers. Both GAIA planes indicate that the preferences of decision-makers are independent of each other (they are not supportive, but also not strongly conflicted), as shown by the orthogonal arrangement of the vectors and . These vectors, through their orthogonal arrangement, define the space of solutions constituting a compromise between the two decision-makers. In the case of PROMETHEE GDSS GAIA, this area includes the balanced alternatives A1, A8, A21, and the unbalanced alternative A6, while on the PROSA GDSS GAIA plane, this area covers only the balanced alternatives A1, A8, A21. This observation confirms that PROSA is able to capture the balance of decision alternatives. It should be noted that the area defined by the vectors and is very similar to the area marked in Figure by the extension of the vectors and , which confirms that capturing two individual rankings and their compromise solutions on the GAIA plane can provide relatively precise information about the group solution.
5.2. PROSA GDSS Sensitivity Analysis
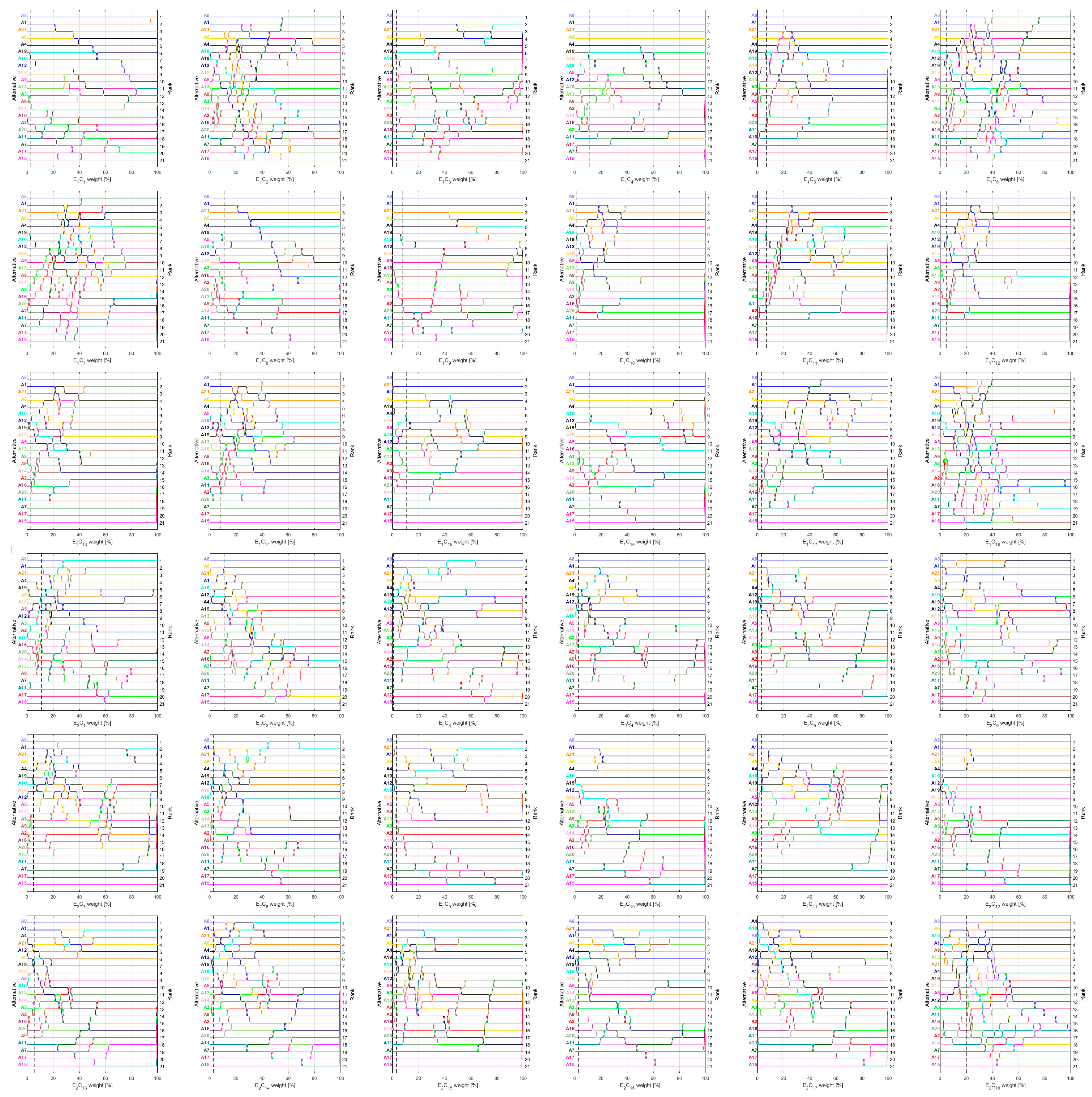
The sensitivity analysis of the PROSA GDSS ranking was considered from two perspectives. We analyzed how the solution of the decision problem changes with linear changes (1) of criteria weights and (2) of the compensation coefficient . In the first study, the weight of the selected criterion was linearly changed, proportionally increasing or decreasing the initial weights of the remaining criteria. Criterion weights given in Table 4 were used as initial values. Stability ranges of criterion weights were determined on the basis of the sensitivity analysis. Due to the large number of alternatives and the frequent reordering of further positions in the ranking, the stability ranges were derived from the top five alternatives. This makes it possible to determine the stability of the best alternatives without introducing information noise in a situation where changes occur in the last places in the ranking. The stability intervals for each criterion are presented in Table 7. The analysis presented in Table 7 shows that the stability intervals are much wider for the weights defined by the decision maker than for the weights of the decision maker’s criteria . This means that the leading alternatives are more sensitive to changes in the weights of the decision maker’s criteria , while in the case of weight changes by the decision maker , the solution is more stable. Table 7 is supplemented by Figure 5 that allows observing the ranking position with linear changes in the weights of individual criteria.
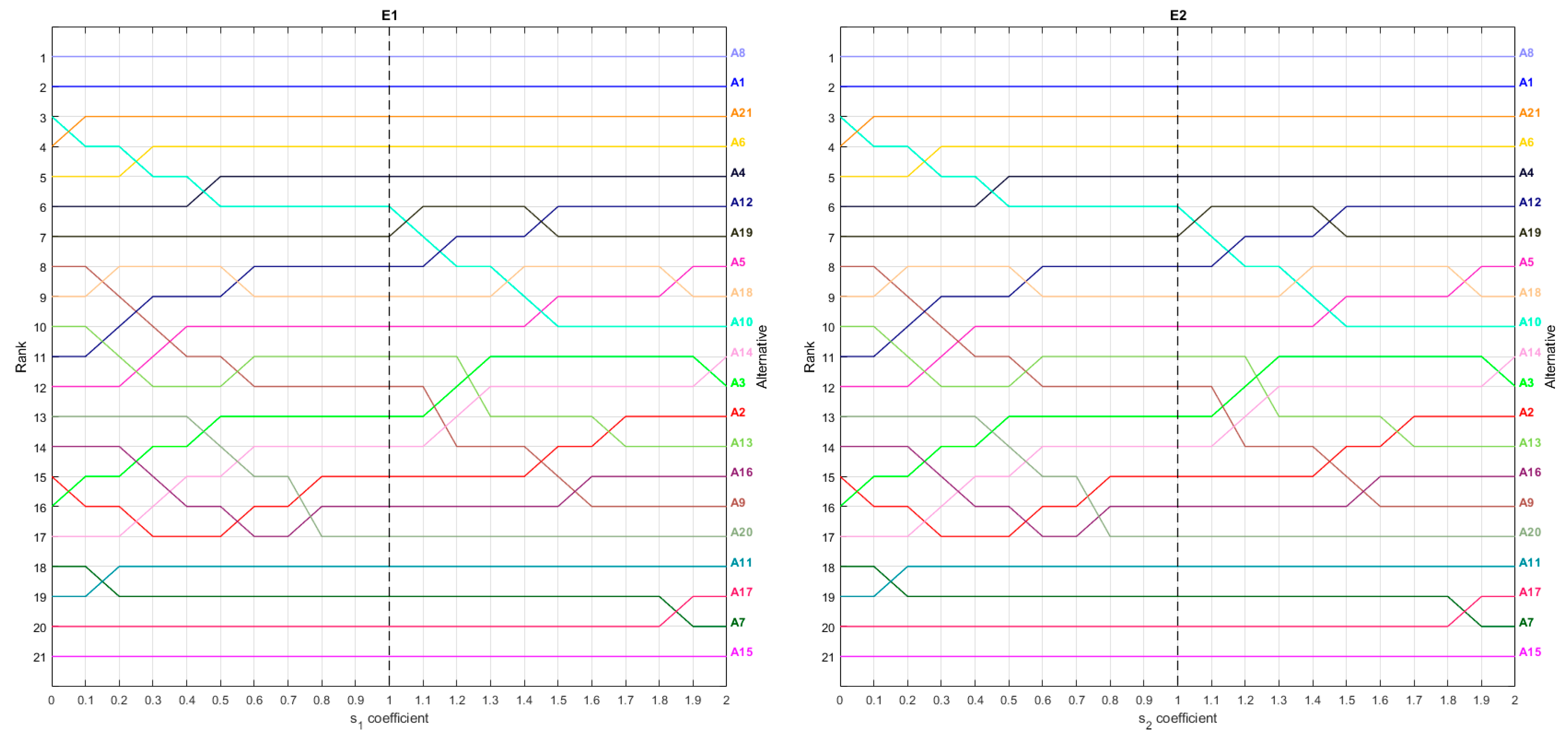
The second sensitivity study consisted of a linear change of the value of the compensation coefficient , separately for decision-makers and . For one of the decision makers, the value of was changed in the range [0, 1], while for the other stakeholder was left. It should be explained that in the case of two-decision makers with equal weights, the change of the coefficient for and gives the same solution. In other words, regardless of the decision-makers for which the coefficient is changed, the solution will change exactly the same. This is due to the specificity of the PROSA method, because in the case of two decision-makers with the same weights, the solution is simply an average. In turn, the distance of both solutions from the solution is the same (), which results from Formulas (14) and (15). This is confirmed by Figure 6 showing changes in the PROSA GDSS ranking depending on the linear change in the value of the coefficient separately for each of the stakeholders. In this figure, it can be seen that the top five positions in the ranking are stable. The order of the five best alternatives only changes when the value of for one of the stakeholders drops , and for the best three alternatives, when for one of the decision makers, bearing in mind that for the other stakeholder .
6. Managerial and Environmental Implications
The results of the research show that the best compromise between the needs of the VSS owner and the needs of potential users of such a service is the A8—JEEP 2xe Urban Camou. It occupies the leading positions in the individual rankings of both stakeholders, which means that it almost perfectly meets the needs of each of them. Choosing the next good e-scooter is not an obvious decision. If we take into account the need to balance the needs of stakeholders and rely on the methodology taking into account the balance (PROSA GDSS), then the second and third places in the ranking will be occupied by: A1—APRILIA eSR2 and A21—XIAOMI Mi Pro2 2022. However, if we apply the compensation methodology (PROMETHEE GDSS) and we will look for a solution that will be a resultant of the views of both decision makers, without taking into account the balance between them, then the second and third places in the ranking will be occupied by A10—Kaabo Mantis 10 ECO800 and A9—Kaabo Mantis 8. Other good vehicles identified by both methodologies are A6—DUCATI PRO-III 2022, A4—BLAUPUNKT ESC90X and the A1 and A21 vehicles already mentioned in the context of good balance, as well as the A10 previously indicated as a very good solution, although less balanced. All these vehicles largely meet the needs of both the entrepreneur and his customers.
Looking at the problem of choosing e-scooters for VSS in Poland from a broader perspective, one should notice the great potential of business activities related to the provision of this type of service. The introduction of comfortable and eco-friendly e-micromobility vehicles is an opportunity to reduce the unfavorable patterns of daily commuting observed in Poland and the extremely high ratio of private transport [76]. Based on the Recovery and Resilience Plan for Poland (the so-called national recovery plan), it should be noted that from the perspective of the next few years, legal regulations are planned in Poland, which will certainly contribute to an increase in the popularity of e-micromobility and e-mobility. Namely, in the Annex to the Recovery and Resilience Plan for Poland [77] one see that in 2025 in Poland, low-emission transport zones are to be introduced in cities with over 100,000 inhabitants and which exceed pollution standards. In addition, the same annex contains information about new taxes that will be imposed on internal combustion vehicles from 2024 and 2026. Together with the dynamically growing gasoline prices in Poland, these activities will certainly force some vehicle users to give up owning a car and buy their own e-micromobility vehicle or use the VSS.
The development of e-mobility has been supported in Poland for several years, but recently there are also programs promoting the development of e-micromobility. For example, the program of government subsidies for the purchase of electric vehicles (‘My electrician’) introduced in 2021 in Poland includes co-financing for the purchase of e-cars, but also electric mopeds, motorcycles, and all-terrain vehicles (quads). For vehicles in the L1-L7 categories, a subsidy in the amount of PLN 4000 is planned [78]. In addition, recently Gdynia was the first city in Poland to introduce co-financing for the purchase of e-bikes by residents. The maximum amount of funding is PLN 2500 (not more than 50% of the purchase price) [79].
The basic justification for the indicated trends is the need to reduce environmental pollution, because electric vehicles do not emit exhaust fumes. However, the environmental impact of electric vehicles depends on the country’s energy mix. Meanwhile, over 70% of the Polish energy mix is based on carbon [6], which makes the argument about environmental protection lose its sense. According to plans for the Polish energy policy, in the coming years, the Polish energy mix should change to renewable energy sources (mainly offshore wind farms and photovoltaics) and nuclear energy [80], but for now these are mainly plans. Therefore, even if the planned legal regulations and the incentive system were already in force and contributing to an increase in the popularity of electric vehicles in a short time, they can only bring positive environmental effects over a longer time span.
7. Conclusions
The aim of the article was to analyze selected e-scooters available on the Polish market and to identify vehicles of this type that are most useful from two slightly opposing perspectives—the owner of the VSS and a potential customer of such services. The solution to the given decision problem is of practical value in the presented research. On the other hand, the scientific contribution of the article included the use of the PROSA GDSS method to search for a compromise between the stakeholders of the decision-making process. The results of the PROSA GDSS method were compared with the results of the application of the PROMETHEE GDSS method, which does not take into account the balance between stakeholders, and allows for a strong compensation of decision makers’ assessments. Graphical representations of PROSA GDSS and PROMETHEE GDSS solutions on the GAIA plane were also compared. Additionally, an analysis of the sensitivity of the PROSA GDSS ranking, changes in criteria weights, and changes in compensation coefficients was performed. The basic PROSA GDSS solution identified the e-scooter A8—JEEP 2xe Urban Camou as the optimal choice. Both the sensitivity analysis and the solution obtained using the PROMETHEE GDSS method confirmed that it is the optimal alternative, the least sensitive to changes in criteria weights and changes in compensation factors. E-scooters are interesting vehicles, which took a few more places in the PROSA GDSS ranking, because they are vehicles well-balanced between the needs of users and entrepreneurs running VSS.
During the research work, no significant limitations were encountered that could significantly affect the obtained results. There was a problem with obtaining reliable data on individual vehicles, as not all e-scooters manufacturers and suppliers provide complete technical information about vehicles on their websites. Therefore, part of the information was obtained on the basis of an analysis of vehicle operating instructions or reviews of e-scooters posted on the Internet. As for methodological limitations, it should be noted that not all the obtained data were precise and reliable. Therefore, in several cases, an average was entered in the performance table based on information from various sources. Therefore, an interesting direction for further methodological work would be to develop the PROSA family of methods for fuzzy representations so that they could better capture the uncertainty of the data.
Author Contributions
Conceptualization, P.Z.; data curation, P.Z. and I.G.; investigation, P.Z.; methodology, P.Z.; resources, I.G.; supervision, P.Z.; visualization, P.Z.; writing—original draft, P.Z. and I.G.; writing—review & editing, P.Z. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the National Science Centre, Poland, grant number 2019/35/D/HS4/02466.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Data are contained within the article.
Conflicts of Interest
The authors declare no conflict of interest.
References
- OPEC. World Oil Outlook; OPEC: Vienna, Austria, 2012; ISBN 978-3-9502722-4-6. [Google Scholar]
- Intergovernmental Panel on Climate Change. Climate Change 2007: Mitigation of Climate Change; Cambridge University Press: Cambridge, UK, 2007; ISBN 978-0-511-54601-3. [Google Scholar]
- Ortega-Cabezas, P.-M.; Colmenar-Santos, A.; Borge-Diez, D.; Blanes-Peiró, J.-J. Can Eco-Routing, Eco-Driving and Eco-Charging Contribute to the European Green Deal? Case Study: The City of Alcalá de Henares (Madrid, Spain). Energy 2021, 228, 120532. [Google Scholar] [CrossRef]
- EMEP/EEA Air Pollutant Emission Inventory Guidebook 2019—European Environment Agency. Available online: https://www.eea.europa.eu//publications/emep-eea-guidebook-2019 (accessed on 26 March 2022).
- Nowelizacja Ustawy o Elektromobilności i Paliwach Alternatywnych z Podpisem Prezydenta RP—Ministerstwo Klimatu i Środowiska—Portal Gov.pl. Available online: https://www.gov.pl/web/klimat/nowelizacja-ustawy-o-elektromobilnosci-i-paliwach-alternatywnych-z-podpisem-prezydenta-rp (accessed on 17 March 2022).
- Lis, A.; Szymanowski, R. Greening Polish Transportation? Untangling the Nexus between Electric Mobility and a Carbon-Based Regime. Energy Res. Soc. Sci. 2022, 83, 102336. [Google Scholar] [CrossRef]
- Macaudière, P.; Rocher, L.; Naschke, W. Diesel Particulate Filters. MTZ Worldw. 2004, 65, 11–13. [Google Scholar] [CrossRef]
- Meijering, J.V.; Kern, K.; Tobi, H. Identifying the Methodological Characteristics of European Green City Rankings. Ecol. Indic. 2014, 43, 132–142. [Google Scholar] [CrossRef]
- Salmeron-Manzano, E.; Manzano-Agugliaro, F. The Electric Bicycle: Worldwide Research Trends. Energies 2018, 11, 1894. [Google Scholar] [CrossRef] [Green Version]
- Lin, H.-H.; Shen, C.-C.; Hsu, I.-C.; Wu, P.-Y. Can Electric Bicycles Enhance Leisure and Tourism Activities and City Happiness? Energies 2021, 14, 8144. [Google Scholar] [CrossRef]
- Sandoval, R.; Van Geffen, C.; Wilbur, M.; Hall, B.; Dubey, A.; Barbour, W.; Work, D.B. Data Driven Methods for Effective Micromobility Parking. Transp. Res. Interdiscip. Perspect. 2021, 10, 100368. [Google Scholar] [CrossRef]
- Shamshiripour, A.; Rahimi, E.; Shabanpour, R.; Mohammadian, A. (Kouros) How Is COVID-19 Reshaping Activity-Travel Behavior? Evidence from a Comprehensive Survey in Chicago. Transp. Res. Interdiscip. Perspect. 2020, 7, 100216. [Google Scholar] [CrossRef]
- Felipe-Falgas, P.; Madrid-Lopez, C.; Marquet, O. Assessing Environmental Performance of Micromobility Using LCA and Self-Reported Modal Change: The Case of Shared E-Bikes, E-Scooters, and E-Mopeds in Barcelona. Sustainability 2022, 14, 4139. [Google Scholar] [CrossRef]
- Storme, T.; Casier, C.; Azadi, H.; Witlox, F. Impact Assessments of New Mobility Services: A Critical Review. Sustainability 2021, 13, 3074. [Google Scholar] [CrossRef]
- Bajec, P.; Tuljak-Suban, D.; Zalokar, E. A Distance-Based AHP-DEA Super-Efficiency Approach for Selecting an Electric Bike Sharing System Provider: One Step Closer to Sustainability and a Win–Win Effect for All Target Groups. Sustainability 2021, 13, 549. [Google Scholar] [CrossRef]
- Hamerska, M.; Ziółko, M.; Stawiarski, P. Assessment of the Quality of Shared Micromobility Services on the Example of the Electric Scooter Market in Poland. IJQR 2022, 16, 19–34. [Google Scholar] [CrossRef]
- Ziemba, P. Multi-Criteria Group Assessment of E-Commerce Websites Based on the New PROSA GDSS Method–the Case of Poland. IEEE Access 2021, 9, 126595–126609. [Google Scholar] [CrossRef]
- Marques, D.L.; Coelho, M.C. A Literature Review of Emerging Research Needs for Micromobility—Integration through a Life Cycle Thinking Approach. Future Transp. 2022, 2, 135–164. [Google Scholar] [CrossRef]
- Boglietti, S.; Barabino, B.; Maternini, G. Survey on E-Powered Micro Personal Mobility Vehicles: Exploring Current Issues towards Future Developments. Sustainability 2021, 13, 3692. [Google Scholar] [CrossRef]
- Tian, Z.; Wang, J.; Wang, J.; Zhang, H. A Multi-Phase QFD-Based Hybrid Fuzzy MCDM Approach for Performance Evaluation: A Case of Smart Bike-Sharing Programs in Changsha. J. Clean. Prod. 2018, 171, 1068–1083. [Google Scholar] [CrossRef]
- Karolemeas, C.; Vassi, A.; Tsigdinos, S.; Bakogiannis, E. Measure the Ability of Cities to Be Biked via Weighted Parameters, Using GIS Tools. The Case Study of Zografou in Greece. Transp. Res. Procedia 2022, 62, 59–66. [Google Scholar] [CrossRef]
- Kurniadhini, F.; Roychansyah, M.S. The Suitability Level of Bike-Sharing Station in Yogyakarta Using SMCA Technique. IOP Conf. Ser. Earth Environ. Sci. 2020, 451, 012033. [Google Scholar] [CrossRef]
- Kabak, M.; Erbaş, M.; Çetinkaya, C.; Özceylan, E. A GIS-Based MCDM Approach for the Evaluation of Bike-Share Stations. J. Clean. Prod. 2018, 201, 49–60. [Google Scholar] [CrossRef]
- Eren, E.; Katanalp, B.Y. Fuzzy-Based GIS Approach with New MCDM Method for Bike-Sharing Station Site Selection According to Land-Use Types. Sustain. Cities Soc. 2022, 76, 103434. [Google Scholar] [CrossRef]
- Guler, D.; Yomralioglu, T. Bicycle Station and Lane Location Selection Using Open Source GIS Technology. In Open Source Geospatial Science for Urban Studies: The Value of Open Geospatial Data; Mobasheri, A., Ed.; Springer International Publishing: Cham, Switzerland, 2021; pp. 9–36. ISBN 978-3-030-58232-6. [Google Scholar]
- Fazio, M.; Giuffrida, N.; Le Pira, M.; Inturri, G.; Ignaccolo, M. Planning Suitable Transport Networks for E-Scooters to Foster Micromobility Spreading. Sustainability 2021, 13, 11422. [Google Scholar] [CrossRef]
- Psarrou Kalakoni, A.M.; Christoforou, Z.; Farhi, N. A Novel Methodology for Micromobility System Assessment Using Multi-Criteria Analysis. Case Stud. Transp. Policy 2022, 10, 976–992. [Google Scholar] [CrossRef]
- Torkayesh, A.E.; Deveci, M. A MulTi-NoRmalization MUlti-Distance ASsessmenT (TRUST) Approach for Locating a Battery Swapping Station for Electric Scooters. Sustain. Cities Soc. 2021, 74, 103243. [Google Scholar] [CrossRef]
- Tang, Y.; Yang, Y. Sustainable E-Bike Sharing Recycling Supplier Selection: An Interval-Valued Pythagorean Fuzzy MAGDM Method Based on Preference Information Technology. J. Clean. Prod. 2021, 287, 125530. [Google Scholar] [CrossRef]
- Deveci, M.; Gokasar, I.; Pamucar, D.; Coffman, D.; Papadonikolaki, E. Safe E-Scooter Operation Alternative Prioritization Using a q-Rung Orthopair Fuzzy Einstein Based WASPAS Approach. J. Clean. Prod. 2022, 347, 131239. [Google Scholar] [CrossRef]
- Wankmüller, C.; Kunovjanek, M.; Sposato, R.G.; Reiner, G. Selecting E-Mobility Transport Solutions for Mountain Rescue Operations. Energies 2020, 13, 6613. [Google Scholar] [CrossRef]
- Sałabun, W.; Palczewski, K.; Wątróbski, J. Multicriteria Approach to Sustainable Transport Evaluation under Incomplete Knowledge: Electric Bikes Case Study. Sustainability 2019, 11, 3314. [Google Scholar] [CrossRef] [Green Version]
- Ziemba, P.; Gago, I. Uncertainty of Preferences in the Assessment of Supply Chain Management Systems Using the PROMETHEE Method. Symmetry 2022, 14, 1043. [Google Scholar] [CrossRef]
- Brans, J.-P.; De Smet, Y. PROMETHEE Methods. In Multiple Criteria Decision Analysis: State of the Art Surveys; Greco, S., Ehrgott, M., Figueira, J.R., Eds.; International Series in Operations Research & Management Science; Springer: New York, NY, USA, 2016; pp. 187–219. ISBN 978-1-4939-3094-4. [Google Scholar]
- Ziemba, P. Multi-Criteria Stochastic Selection of Electric Vehicles for the Sustainable Development of Local Government and State Administration Units in Poland. Energies 2020, 13, 6299. [Google Scholar] [CrossRef]
- Ishizaka, A.; Nemery, P. General Introduction. In Multi-Criteria Decision Analysis: Methods and Software; Wiley: Chichester, UK, 2013; pp. 1–9. ISBN 978-1-118-64489-8. [Google Scholar]
- Mareschal, B.; Brans, J.-P. Geometrical Representations for MCDA. Eur. J. Oper. Res. 1988, 34, 69–77. [Google Scholar] [CrossRef]
- Ziemba, P. Towards Strong Sustainability Management—A Generalized PROSA Method. Sustainability 2019, 11, 1555. [Google Scholar] [CrossRef] [Green Version]
- Statista Poland: Most Popular Electronics Stores. 2021. Available online: https://www.statista.com/statistics/1242536/poland-most-popular-electronics-stores/ (accessed on 26 May 2022).
- Apostolou, G.; Reinders, A.; Geurs, K. An Overview of Existing Experiences with Solar-Powered E-Bikes. Energies 2018, 11, 2129. [Google Scholar] [CrossRef] [Green Version]
- Timmermans, J.-M.; Matheys, J.; Lataire, P.; Van Mierlo, J.; Cappelle, J. A Comparative Study of 12 Electrically Assisted Bicycles. World Electr. Veh. J. 2009, 3, 93–103. [Google Scholar] [CrossRef]
- Ziemba, P. Multi-Criteria Approach to Stochastic and Fuzzy Uncertainty in the Selection of Electric Vehicles with High Social Acceptance. Expert Syst. Appl. 2021, 173, 114686. [Google Scholar] [CrossRef]
- Ziemba, P. Selection of Electric Vehicles for the Needs of Sustainable Transport under Conditions of Uncertainty—A Comparative Study on Fuzzy MCDA Methods. Energies 2021, 14, 7786. [Google Scholar] [CrossRef]
- Biswas, T.K.; Das, M.C. Selection of Commercially Available Electric Vehicle Using Fuzzy AHP-MABAC. J. Inst. Eng. India Ser. C 2019, 100, 531–537. [Google Scholar] [CrossRef]
- Ecer, F. A Consolidated MCDM Framework for Performance Assessment of Battery Electric Vehicles Based on Ranking Strategies. Renew. Sustain. Energy Rev. 2021, 143, 110916. [Google Scholar] [CrossRef]
- Sonar, H.C.; Kulkarni, S.D. An Integrated AHP-MABAC Approach for Electric Vehicle Selection. Res. Transp. Bus. Manag. 2021, 41, 100665. [Google Scholar] [CrossRef]
- Piwowarski, M.; Borawski, M.; Nermend, K. The Problem of Non-Typical Objects in the Multidimensional Comparative Analysis of the Level of Renewable Energy Development. Energies 2021, 14, 5803. [Google Scholar] [CrossRef]
- Ustawa z Dnia 30 Marca 2021 r. o Zmianie Ustawy—Prawo o Ruchu Drogowym Oraz Niektórych Innych Ustaw. Available online: https://isap.sejm.gov.pl/isap.nsf/DocDetails.xsp?id=WDU20210000720 (accessed on 30 May 2022).
- Aprilia ESR2. Available online: https://www.apriliasmartmovement.it/en/product/aprilia-esr2/ (accessed on 30 May 2022).
- Blaupunkt ESC608. Available online: https://blaupunkt.com/cpl/produkt/esc608/ (accessed on 30 May 2022).
- Blaupunkt ESC808. Available online: https://blaupunkt.com/cpl/produkt/esc808/ (accessed on 30 May 2022).
- Blaupunkt ESC90X. Available online: https://blaupunkt.com/cpl/produkt/esc90x/ (accessed on 30 May 2022).
- Ducati PRO-I EVO. Available online: https://www.ducatiurbanemobility.com/electric-mobility/pro-i-evo/ (accessed on 30 May 2022).
- Ducati PRO-III. Available online: https://www.ducatiurbanemobility.com/electric-mobility/pro-iii/ (accessed on 30 May 2022).
- FIAT F500-F85P. Available online: https://4cv.pl/wp-content/uploads/2021/03/F500-F85_manual_EN_PL.pdf (accessed on 30 May 2022).
- Jeep 2xe Camou Electric Scooter Review. Available online: https://scooter.guide/jeep-2xe-camou-electric-scooter-review/ (accessed on 30 May 2022).
- Kaabo Mantis 8 PLUS Electric Scooter. Available online: https://kaaboeurope.com/products/kaabo-mantis-8-plus-electric-scooter (accessed on 30 May 2022).
- Kaabo Mantis 10 ECO 800 (Lite Plus) Electric Scooter. Available online: https://kaaboeurope.com/products/kaabo-mantis-10-lite-plus-electric-scooter (accessed on 30 May 2022).
- Kaabo Skywalker 8H ECO500. Available online: https://kaabostore.eu/product/skywalker-8h (accessed on 30 May 2022).
- Motus PRO 8.5 Lite 350W 35 km/h. Available online: https://motusxd.pl/hulajnogi-za-miasto/20-190-hulajnoga-elektryczna-motus-pro-85-lite-350w-35kmh-5901821995450.html (accessed on 30 May 2022).
- Motus PRO 10 sport 2021 2 × 1000 W 66 km/h. Available online: https://motusxd.pl/hulajnogi-za-miasto/28-553-hulajnoga-elektryczna-motus-pro-10-sport-2021-2x1000w-66kmh-5901821995474.html (accessed on 30 May 2022).
- Red Bull Racing RTEEN10-10. Available online: https://www.mediaexpert.pl/products/files/37/3735110/instrukcja-obslugi-RED-BULL-Racing-10-Pro.pdf (accessed on 30 May 2022).
- Red Bull Racing RTEEN85-75. Available online: https://www.mediaexpert.pl/products/files/37/3735102/instrukcja-obslugi-red-bull-rteen85-75.pdf (accessed on 30 May 2022).
- Segway T15D. Available online: https://pl-pl.segway.com/products/ninebot-kickscooter-air-t15e-powered-by-segway-1 (accessed on 30 May 2022).
- Skymaster Nexos. Available online: https://skymaster24.pl/sklep/hulajnogi/212--hulajnoga-elektryczna-skymaster-nexos.html (accessed on 30 May 2022).
- Mi Electric Scooter 1S. Available online: https://www.mi.com/global/mi-electric-scooter-1S/ (accessed on 30 May 2022).
- Mi Electric Scooter 3. Available online: https://www.mi.com/global/product/mi-electric-scooter-3/ (accessed on 30 May 2022).
- Mi Electric Scooter Essential. Available online: https://www.mi.com/global/mi-electric-scooter-essential/ (accessed on 30 May 2022).
- Mi Electric Scooter Pro 2. Available online: https://www.mi.com/global/mi-electric-scooter-Pro2/ (accessed on 30 May 2022).
- Wang, K.; Qian, X.; Fitch, D.T.; Lee, Y.; Malik, J.; Circella, G. What Travel Modes Do Shared E-Scooters Displace? A Review of Recent Research Findings. Transp. Rev. 2022, 102, 103134. [Google Scholar] [CrossRef]
- Yang, H.; Bao, Y.; Huo, J.; Hu, S.; Yang, L.; Sun, L. Impact of Road Features on Shared E-Scooter Trip Volume: A Study Based on Multiple Membership Multilevel Model. Travel Behav. Soc. 2022, 28, 204–213. [Google Scholar] [CrossRef]
- Cao, Z.; Zhang, X.; Chua, K.; Yu, H.; Zhao, J. E-Scooter Sharing to Serve Short-Distance Transit Trips: A Singapore Case. Transp. Res. Part A Policy Pract. 2021, 147, 177–196. [Google Scholar] [CrossRef]
- Chicco, A.; Diana, M. Understanding Micro-Mobility Usage Patterns: A Preliminary Comparison between Dockless Bike Sharing and e-Scooters in the City of Turin (Italy). Transp. Res. Procedia 2022, 62, 459–466. [Google Scholar] [CrossRef]
- Deshmukh, S.C. Preference Ranking Organization Method Of Enrichment Evaluation (Promethee). Int. J. Eng. Sci. Invent. 2013, 2, 28–34. [Google Scholar]
- Roy, B. The Outranking Approach and the Foundations of Electre Methods. Theory Decis. 1991, 31, 49–73. [Google Scholar] [CrossRef]
- Połom, M. E-Revolution in Post-Communist Country? A Critical Review of Electric Public Transport Development in Poland. Energy Res. Soc. Sci. 2021, 80, 102227. [Google Scholar] [CrossRef]
- European Commission. Annex to the Proposal for a Council Implementing Decision on the Approval of the Assessment of the Recovery and Resilience Plan for Poland; European Commission: Brussels, Belgium, 2022. [Google Scholar]
- Polishnews Surcharges for Electric Cars. My Electrician Program Start. Available online: https://polishnews.co.uk/surcharges-for-electric-cars-my-electrician-program-start/ (accessed on 10 July 2022).
- Bates, K. Subsidies for Electric Bikes in the First City in Poland! GAMINGDEPUTY 2022. Available online: https://www.gamingdeputy.com/subsidies-for-electric-bikes-in-the-first-city-in-poland/ (accessed on 10 July 2022).
- Kudełko, M. Modeling of Polish Energy Sector—Tool Specification and Results. Energy 2021, 215, 119149. [Google Scholar] [CrossRef]
Figure 1.
Diagram of the research procedure based on the PROSA GDSS method.

Figure 2.
Preference functions used in the PROMETHEE method.

Figure 3.
PROMETHEE GAIA plane obtained for individual stakeholder rankings.

Figure 4.
GAIA planes obtained for group rankings by aggregating individual rankings using the following methods: (a) PROMETHEE GDSS, (b) PROSA GDSS.
Figure 4.
GAIA planes obtained for group rankings by aggregating individual rankings using the following methods: (a) PROMETHEE GDSS, (b) PROSA GDSS.

Figure 5.
Changes in the PROSA GDSS ranking depending on changes in the weights of the criteria.

Figure 6.
Changes in the PROSA GDSS ranking depending on changes in the weighting of the criteria.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Applications of MCDA methods in decision problems related to microtransport.
| Aim of the Research | Subject of Research | Location | MCDA Methods | No of Criteria/Subcriteria | No of Alternatives | Comment | Ref. |
|---|---|---|---|---|---|---|---|
| Development of a smart performance evaluation framework BSPs | BSPs | Changsha, China | Fuzzy BWM (CW), Fuzzy MDM (CW), Fuzzy MULTIMOORA (PA) | 18 | 5 | 4 experts | [20] |
| Development of an index assessing the possibility of using a bicycle in the existing road network | Roads (road network) | Zografou, Greece | AHP | 3/10 | Infinity | [21] | |
| Identification of suitable locations for BSS stations | Potential locations of BSS stations in the GIS system | Yogyakarta, Indonesia | AHP (CW), SMCA (PA) | 3/13 | Infinity | [22] | |
| Location suitability analysis for BSS stations | Potential locations of BSS stations in the GIS system | Karsiyaka, Izmir, Turkey | AHP (CW), MULTIMOORA (PA) | 3/12 | 19 | [23] | |
| Determining the appropriate locations of BSS stations depending on the type of land development | Potential locations of BSS stations in the GIS system | Izmir, Turkey | AHP (CW), VIKOR (PA), Psychometric VIKOR (PA) | 9/21 | 42 (transportation related), 28 (recreational) | [24] | |
| Decision support in the selection of locations for BSS and BL stations | Potential locations of BSS and BL stations in the GIS system | Istanbul, Turkey | AHP (CW), Fuzzy AHP (CW), BWM (CW), TOPSIS (PA) | 9 | 39 (BSS station), 6 (BL) | 3 scenarios | [25] |
| Transport network suitability analysis for e-scooters | Roads (road network) | Catania, Italy | SMCA | 7 | Infinity | [26] | |
| Development of an index to assess the fit of the neighborhood for specific types of micromobility and selection of the micromobility system for a given area | Micromobility systems (station-based, free floating, privately owned: bikes, e-bikes, e-scooters) | Paris, France | AHP | 11/78 (index related), 8/12 (selection related) | 0 (index related), 7 (selection related) | [27] | |
| Development of a BSST location selection framework for e-scooters | Potential BSST locations | Istanbul, Turkey | TRUST | 10 | 4 | [28] | |
| Choosing sustainable e-bike-sharing recycling supplier | Recycling service providers | - | IVPFIDM | 8 | 4 | 3 experts | [29] |
| Development of a DSS to evaluate strategies leading to the safe use of e-scooters | Policies to develop e-scooters security | - | Fuzzy LAAW (CW), qROFS Einstein WASPAS (PA) | 14 | 3 | 5 experts | [30] |
| Choosing an e-BSS provider | Real and fictional e-BSS providers | Slovenia | DAHP (CW), DEA (PA) | 26 | 24 | [15] | |
| Selection of assessment attributes for e-micromobility transport solutions | E-microtransport evaluation criteria for mountain rescue | Austria / Italy | BWM (CW) | 22 | - | [31] | |
| Analysis of e-bikes in the context of sustainable transport in order to select the best vehicle | E-bikes | - | COMET | 8 | 64 | [32] |
BSP—Bike-Sharing Program, BSS—Bicycle/Bike-Sharing System, BL—Bicycle Lane, BSST—Battery Swapping Stations, DSS—Decision Support System, GIS—Geographic Information System, BWM- Best-Worst Method, MDM—Maximizing Deviation Method, MULTIMOORA—Multi-Objective Optimization by Ratio Analysis plus the Full Multiplicative Form, AHP—Analytic Hierarchy Process, SMCA—Spatial Multi-Criteria Analysis, VIKOR—Multicriteria Optimization and Compromise Solution (Visekriterijumska Optimizacija i Kompromisno Resenje), TOPSIS—Technique for Order of Preference by Similarity to Ideal Solution, TRUST—Multi-Normalization Multi-Distance Assessment, IVPFIDM—Interval-Valued Pythagorean Fuzzy Information Decision-Making Approach, DAHP—Distance-based AHP, DEA—Data Envelopment Analysis, LAAW—Logarithmic Additive Assessment of the Weight Coefficients, qROFS—q-Rung Orthopair Fuzzy Sets, WASPAS—Weighted Aggregated Sum Product Assessment, COMET—Characteristic Objects Method.
Table 2.
Criteria selected for the evaluation of e-scooters.
| No | Criterion | Unit | Direction | Reference |
|---|---|---|---|---|
| Battery capacity | Ampere hours [Ah] | Max | [31,32,40,41,42,43,45,46] | |
| Battery charging time | Hours [h] | Min | [15,32,41,42,43,45,46] | |
| Engine power | Watts [W] | Max | [32,40,42,43,45] | |
| Max gradient | Percent [%] | Max | [31] | |
| Number of gears | Units | Max | [32] | |
| Weight | Kilograms [kg] | Min | [31,32,40,41,45] | |
| Load capacity | Kilograms [kg] | Max | [42,43,45,46] | |
| Range | Kilometers [km] | Max | [15,31,32,40,41,42,43,44,45,46] | |
| Tires diameter | Inches [inch] | Max | ||
| Mobile app | True/False | Max | ||
| Cruise control | True/False | Max | ||
| Pedestrian mode | True/False | Max | ||
| KERS | True/False | Max | ||
| e-ABS | True/False | Max | ||
| Suspension | True/False | Max | [15] | |
| Brakes | Points | Max | ||
| Protection rating | Points | Max | [31] | |
| Price | Polish new zloty [PLN] | Min | [31,32,41,42,43,44,45,46] |
KERS—Kinetic Energy Recovery System, e-ABS—Electric Anti-lock Braking System.
Table 3.
Parameters and evaluations of e-scooters.
| Criterion | A1—APRILIA eSR2 | A2—BLAUPUNKT ESC608 | A3—BLAUPUNKT ESC808 | A4—BLAUPUNKT ESC90X | A5—DUCATI PRO-I EVO 2022 | A6—DUCATI PRO-III 2022 | A7—FIAT F500-F85P | A8—JEEP 2xe Urban Camou | A9—Kaabo Mantis 8 | A10—Kaabo Mantis 10 ECO800 | A11—Kaabo Sky-walker 8H ECO 500 | A12—Motus PRO 8.5 Lite | A13—Motus PRO 10 Sport 2021 | A14—Red Bull Racing RTEEN10-10 | A15—Red Bull Racing RTEEN85-75 | A16—Segway KickScooter AIR T15E | A17—SKYMASTER Nexos | A18—XIAOMI Mi 1S | A19—XIAOMI Mi 3 | A20—XIAOMI Mi Essential | A21—XIAOMI Mi Pro2 2022 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Popularity ranks | -/2/- | -/-/2 | -/8/- | -/-/9 | -/3/- | -/6/- | -/-/4 | -/4/- | 8/-/- | 6/-/- | 9/-/- | 4/-/5 | 2/7/10 | 5/5/- | 10/-/- | 7/-/- | -/-/7 | -/-/8 | 3/9/1 | -/1/3 | 1/10/6 |
| Battery capacity [Ah] | 8 | 6 | 5 | 10 | 7.8 | 13 | 7.5 | 9.6 | 18.2 | 18.2 | 13 | 10.4 | 18.2 | 10.4 | 7.5 | 4 | 6 | 7.65 | 7.65 | 5.1 | 12.4 |
| Battery charging time [h] | 5 | 5 | 2 | 6 | 4 | 9 | 4 | 5 | 8.5 | 8 | 7 | 8 | 9 | 8 | 5 | 4 | 5 | 5.5 | 5.5 | 3.5 | 8.5 |
| Engine power [W] | 350 | 250 | 350 | 350 | 350 | 350 | 350 | 500 | 1600 * | 800 | 500 | 350 | 2000 ** | 350 | 350 | 300 | 350 | 250 | 300 | 250 | 300 |
| Max gradient [%] | 23 | 15 | 18 | 15 | 15 | 20 | 15 | 26 | 30 | 30 | 20 | 20 | 30 | 15 | 10 | 15 | 10 | 14 | 16 | 10 | 20 |
| Number of gears | 3 | 3 | 3 | 4 | 4 | 4 | 3 | 4 | 4 | 4 | 3 | 3 | 3 | 3 | 3 | 4 | 3 | 3 | 3 | 3 | 3 |
| Weight [kg] | 16.5 | 15 | 13.5 | 14.5 | 12 | 17.5 | 14 | 19 | 26.5 | 26 | 18 | 17 | 29 | 17.3 | 14 | 10.5 | 14.2 | 12.5 | 13.2 | 12 | 14.2 |
| Load capacity [kg] | 100 | 120 | 120 | 120 | 100 | 100 | 140 | 100 | 120 | 120 | 100 | 120 | 150 | 100 | 120 | 100 | 120 | 100 | 100 | 100 | 100 |
| Range [km] | 25 | 20 | 20 | 40 | 25 | 50 | 20 | 45 | 56 | 54 | 45 | 35 | 65 | 35 | 20 | 15 | 25 | 30 | 30 | 20 | 45 |
| Tires diameter [inch] | 10 | 8.5 | 8.5 | 10 | 8.5 | 10 | 8.5 | 10 | 8 | 10 | 8 | 8.5 | 10 | 10 | 8.5 | 7.5 | 10 | 8.5 | 8.5 | 8.5 | 8.5 |
| Mobile app | 1 | 0 | 0 | 1 | 1 | 1 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 1 | 1 | 1 | 1 |
| Cruise control | 0 | 1 | 1 | 1 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 |
| Pedestrian mode | 1 | 0 | 0 | 1 | 1 | 1 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 1 | 0 | 1 | 1 | 1 | 1 |
| KERS | 1 | 0 | 0 | 0 | 1 | 1 | 0 | 1 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 1 | 1 | 1 | 1 |
| e-ABS | 0 | 1 | 1 | 1 | 0 | 0 | 0 | 0 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 1 | 1 | 1 |
| Front & rear suspension | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| Brakes [points] | 3 | 2 | 1 | 2 | 2 | 3 | 1 | 3 | 3 | 3 | 2 | 1 | 3 | 1 | 1 | 0 | 1 | 2 | 2 | 2 | 2 |
| Protection rating [points] | 3 | 0 | 0 | 0 | 2 | 3 | 3 | 3 | 0 | 0 | 0 | 1 | 1 | 0 | 0 | 3 | 0 | 2 | 2 | 2 | 2 |
| Price [PLN] | 4080 | 1600 | 2480 | 2790 | 2700 | 5500 | 1600 | 5200 | 7500 | 6000 | 4000 | 2700 | 7000 | 2500 | 2000 | 3060 | 1700 | 2060 | 2290 | 1750 | 2700 |
| Front (FB) and rear brake (RB) | FB–D RB–C | FB–E RB–C | RB–C,F | FB–E RB–C,F | FB–E RB–C | FB–C RB–C | RB–C | FB–C RB–C | FB–C RB–C | FB–C RB–C | FB–E RB–D | RB–D | FB–C RB–C | RB–C | RB–C | FB–E RB–F | RB–C,F | FB–E RB–C | FB–E RB–C | FB–E RB–C | FB–E RB–C |
| Protection rating | IPX4 | - | - | - | IP54 | IPX4 | IPX4 | IPX4 | - | - | - | IP44 | IP44 | - | - | IPX4 | - | IP54 | IP54 | IP54 | IP54 |
| Reference | [49] | [50] | [51] | [52] | [53] | [54] | [55] | [56] | [57] | [58] | [59] | [60] | [61] | [62] | [63] | [64] | [65] | [66] | [67] | [68] | [69] |
Brakes: 0—FB–E, RB–F; 1—RB–C,F; RB–C; RB–D; 2—FB–E, RB–C; FB–E, RB–D; FB–E, RB–C,F; 3—FB–C, RB–C; FB–D, RB–C; Protection rating: 0—No; 1—IP44; 2—IP54; 3—IPX4; Front (FB) and rear brake (RB): D—Drum, C—Disk, F—Fender; * 2 × 800 W; ** 2 × 1000 W.
Table 4.
Stakeholder preference models.
| No | Criterion | Unit | Preference Direction | Weight [%] | Preference Function | Thresholds | ||
|---|---|---|---|---|---|---|---|---|
| VSS Client (dm1) | VSS Client (dm2) | q | p | |||||
| Battery capacity | Ampere hours [Ah] | Max | 3 | 11 | pre | - | 6 | |
| Battery charging time | Hours [h] | Min | 0 | 11 | pre | - | 4 | |
| Engine power | Watts [W] | Max | 3 | 1 | pre | - | 200 | |
| Max gradient | Percent [%] | Max | 11 | 3 | pseudo | 2 | 6 | |
| Number of gears | Units | Max | 7 | 3 | usual | - | - | |
| Weight | Kilograms [kg] | Min | 5 | 2 | pre | - | 5 | |
| Load capacity | Kilograms [kg] | Max | 3 | 5 | level | 0 | 30 | |
| Range | Kilometers [km] | Max | 11 | 3 | pseudo | 2 | 15 | |
| Tires diameter | Inches [inch] | Max | 8 | 3 | level | 0 | 1.5 | |
| Mobile app | True / False | Max | 1 | 0 | usual | - | - | |
| Cruise control | True / False | Max | 7 | 3 | usual | - | - | |
| Pedestrian mode | True / False | Max | 5 | 2 | usual | - | - | |
| KERS | True / False | Max | 3 | 6 | usual | - | - | |
| e-ABS | True / False | Max | 8 | 3 | usual | - | - | |
| Suspension | True / False | Max | 11 | 3 | usual | - | - | |
| Brakes | Points | Max | 11 | 3 | level | 0 | 2 | |
| Protection rating | Points | Max | 3 | 18 | level | 0 | 2 | |
| Price | Polish new zloty [PLN] | Min | 0 | 20 | pseudo | 40 | 1000 | |
Table 5.
Assessments of alternatives aggregated in individual and PROSA GDSS group rankings.
| Alternative | VSS Client (dm1) (PROMETHEE II) | VSS Owner (dm2) (PROMETHEE II) | Group (PROSA GDSS) | |||
|---|---|---|---|---|---|---|
| Rank | Rank | Rank | ||||
| A1 | 0.1123 | 7 | 0.0609 | 7 | 0.0320 | 2 |
| A2 | −0.1534 | 16 | 0.0047 | 11 | −0.0805 | 15 |
| A3 | −0.1353 | 15 | −0.0516 | 14 | −0.0710 | 13 |
| A4 | 0.1596 | 6 | −0.0076 | 12 | −0.0040 | 5 |
| A5 | −0.0753 | 14 | 0.0661 | 6 | −0.0395 | 10 |
| A6 | 0.1712 | 5 | 0.0056 | 10 | 0.0029 | 4 |
| A7 | −0.2750 | 19 | 0.2003 | 1 | −0.1444 | 19 |
| A8 | 0.3952 | 1 | 0.1453 | 2 | 0.0763 | 1 |
| A9 | 0.3110 | 3 | −0.1255 | 19 | −0.0659 | 12 |
| A10 | 0.3861 | 2 | −0.0437 | 13 | −0.0229 | 6 |
| A11 | −0.0361 | 10 | −0.2110 | 21 | −0.1108 | 18 |
| A12 | 0.0019 | 9 | −0.0532 | 15 | −0.0279 | 8 |
| A13 | 0.2503 | 4 | −0.1181 | 18 | −0.0620 | 11 |
| A14 | −0.0662 | 12 | −0.1380 | 20 | −0.0724 | 14 |
| A15 | −0.3765 | 21 | −0.0996 | 17 | −0.1977 | 21 |
| A16 | −0.1590 | 17 | 0.0466 | 9 | −0.0835 | 16 |
| A17 | −0.3217 | 20 | −0.0634 | 16 | −0.1689 | 20 |
| A18 | −0.0674 | 13 | 0.1097 | 4 | −0.0354 | 9 |
| A19 | −0.0451 | 11 | 0.0828 | 5 | −0.0237 | 7 |
| A20 | −0.1642 | 18 | 0.1379 | 3 | −0.0862 | 17 |
| A21 | 0.0876 | 8 | 0.0518 | 8 | 0.0272 | 3 |
Table 6.
PROMETHEE GDSS and PROSA GDSS groups rankings.
| Alternative | A1 | A2 | A3 | A4 | A5 | A6 | A7 | A8 | A9 | A10 | A11 | A12 | A13 | A14 | A15 | A16 | A17 | A18 | A19 | A20 | A21 | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| PROMETHEE GDSS | 0.0454 | −0.039 | −0.0491 | 0.0399 | −0.0024 | 0.0464 | −0.0196 | 0.1419 | 0.0487 | 0.0899 | −0.0648 | −0.0134 | 0.0347 | −0.0536 | −0.125 | −0.0295 | −0.1011 | 0.0111 | 0.0099 | −0.0069 | 0.0366 | |
| Rank | 5 | 16 | 17 | 6 | 11 | 4 | 14 | 1 | 3 | 2 | 19 | 13 | 8 | 18 | 21 | 15 | 20 | 9 | 10 | 12 | 7 | |
| PROSA GDSS | 0.032 | −0.0805 | −0.071 | −0.004 | −0.0395 | 0.0029 | −0.1444 | 0.0763 | −0.0659 | −0.0229 | −0.1108 | −0.0279 | −0.062 | −0.0724 | −0.1977 | −0.0835 | −0.1689 | −0.0354 | −0.0237 | −0.0862 | 0.0272 | |
| Rank | 2 | 15 | 13 | 5 | 10 | 4 | 19 | 1 | 12 | 6 | 18 | 8 | 11 | 14 | 21 | 16 | 20 | 9 | 7 | 17 | 3 | |
Table 7.
Stability ranges and sensitivity for the top five positions in the PROSA GDSS ranking.
| Criteria | VSS Client (dm1)—Criteria Weights | VSS Owner (dm2)—Criteria Weights | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Stability Interval | Sensitivity | Nominal Weight | Stability Interval | Sensitivity | Nominal Weight | |||||
| Min | Max | Min-Nominal | Max-Nominal | Min | Max | Min-Nominal | Max-Nominal | |||
| 0 | 21 | - | 18 | 3 | 8 | 12 | 3 | 1 | 11 | |
| 0 | 11 | - | 11 | 0 | 11 | 12 | 0 | 1 | 11 | |
| 0 | 21 | - | 18 | 3 | 0 | 4 | - | 3 | 1 | |
| 0 | 50 | - | 39 | 11 | 1 | 5 | 2 | 2 | 3 | |
| 0 | 15 | - | 8 | 7 | 0 | 7 | - | 4 | 3 | |
| 0 | 12 | - | 7 | 5 | 0 | 4 | - | 2 | 2 | |
| 0 | 23 | - | 20 | 3 | 0 | 7 | - | 2 | 5 | |
| 0 | 21 | - | 10 | 11 | 0 | 7 | - | 4 | 3 | |
| 0 | 43 | - | 35 | 8 | 2 | 10 | 1 | 7 | 3 | |
| 0 | 7 | - | 6 | 1 | 0 | 15 | - | 15 | 0 | |
| 0 | 22 | - | 15 | 7 | 0 | 4 | - | 1 | 3 | |
| 0 | 11 | - | 6 | 5 | 0 | 18 | - | 16 | 2 | |
| 0 | 9 | - | 6 | 3 | 5 | 9 | 1 | 3 | 6 | |
| 0 | 13 | - | 5 | 8 | 0 | 3 | - | 0 | 3 | |
| 1 | 25 | 10 | 14 | 11 | 3 | 6 | 0 | 3 | 3 | |
| 0 | 58 | - | 47 | 11 | 1 | 11 | 2 | 8 | 3 | |
| 0 | 21 | - | 18 | 3 | 17 | 25 | 1 | 7 | 18 | |
| 0 | 9 | - | 9 | 0 | 17 | 21 | 3 | 1 | 20 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Ziemba, P.; Gago, I. Compromise Multi-Criteria Selection of E-Scooters for the Vehicle Sharing System in Poland. Energies 2022, 15, 5048. https://doi.org/10.3390/en15145048
AMA Style
Ziemba P, Gago I. Compromise Multi-Criteria Selection of E-Scooters for the Vehicle Sharing System in Poland. Energies. 2022; 15(14):5048. https://doi.org/10.3390/en15145048
Chicago/Turabian StyleZiemba, Paweł, and Izabela Gago. 2022. "Compromise Multi-Criteria Selection of E-Scooters for the Vehicle Sharing System in Poland" Energies 15, no. 14: 5048. https://doi.org/10.3390/en15145048
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.