
A Survey on Intelligent-Reflecting-Surface-Assisted UAV Communications


1
School of Electronic Engineering, Soongsil University, Seoul 06978, Korea
2
Department of Information Communication Convergence Technology, Soongsil University, Seoul 06978, Korea
*
Author to whom correspondence should be addressed.
Energies 2022, 15(14), 5143; https://doi.org/10.3390/en15145143
Submission received: 20 June 2022
/
Revised: 11 July 2022
/
Accepted: 12 July 2022
/
Published: 15 July 2022
(This article belongs to the Section K: State-of-the-Art Energy Related Technologies)
Abstract
:Both the unmanned aerial vehicle (UAV) and intelligent reflecting surface (IRS) are attracting growing attention as enabling technologies for future wireless networks. In particular, IRS-assisted UAV communication, which incorporates IRSs into UAV communications, is emerging to overcome the limitations and problems of UAV communications and improve the system performance. This article aims to provide a comprehensive survey on IRS-assisted UAV communications. We first present six representative scenarios that integrate IRSs and UAVs according to the installation point of IRSs and the role of UAVs. Then, we introduce and discuss the technical features of the state-of-the-art relevant works on IRS-assisted UAV communications systems from the perspective of the main performance criteria, i.e., spectral efficiency, energy efficiency, security, etc. We also introduce machine learning algorithms adopted in the previous works. Finally, we highlight technical issues and research challenges that need to be addressed to realize IRS-assisted UAV communications systems.

1. Introduction
Commercialization of Fifth-Generation (5G) mobile communications has led to a tremendous increase in the number of users and Internet of Things (IoT) devices, which require next-generation communication technologies. Furthermore, Sixth-Generation (6G) communications are emerging to be commercialized by 2030. Various studies have been conducted on its vision and research and development issues. According to these studies, future 6G communications is expected to target more advanced network performance than 5G, with the advent of challenging applications, such as extended reality, industrial automation, and tactile Internet. Non-terrestrial networks (NTNs) are being considered as one of the key elements of revitalizing 5G communications, expanding related industries, and developing future 6G networks [1].
NTNs can provide wireless services in a cost-effective manner in areas where 5G terrestrial networks are not available (such as isolated/remote areas, aboard aircraft, or ships) and vulnerable areas (out-of-town or rural areas) because of the extensive service coverage and reduced physical attacks on space/air platforms. They also provide service continuity to IoT devices or passengers on mobile platforms (such as aircraft, ships, high-speed trains, and buses) and enable reliable service for future communications for railways, sea, and aviation. In addition, NTNs can extend the availability of 5G networks by providing efficient multicast and broadcast resources for data delivery to network edges (or user terminals). These benefits can be obtained by a standalone NTN or an integrated terrestrial and non-terrestrial network. Furthermore, the benefits are expected to have a significant impact on various domains, including transportation, public safety, media and entertainment, e-health, energy, agriculture, finance, and automobiles. Unmanned aerial vehicles (UAVs), a part of aerial communication platforms, are emerging as important entities in future wireless networks. UAV-enabled communication networks are expected to improve the spectral efficiency, extend the coverage, and increase the flexibility of wireless networks [2]. In addition, UAVs can be effectively used for data dissemination to diverse IoT devices and for emergency communications in disaster scenarios [3]. From the perspective of wireless communications, the UAV has unique characteristics, such as high degrees of freedom in positioning and trajectories in three-dimensional (3D) space, low deployment and maintenance costs, and the ability to establish clear line-of-sight (LoS) links with other nodes. In particular, the mobility of UAVs will provide new opportunities for adaptive communications in aerial networks. UAVs can flexibly adjust their placement/trace over time based on the location and local wireless environments. If an LoS link can be built by the careful selection of the hovering position or trajectory of the UAV, communication quality can be improved [4]. Fixed UAVs can also find the best location for coverage extension. If the mobility of UAVs can be fully utilized, it is easier to meet the quality of service (QoS) requirements of wireless networks by optimizing UAV trajectories dynamically, depending on user location and surroundings [5]. Therefore, many works have been conducted to improve the performance of wireless networks using UAVs. The role of UAVs in such networks can be classified into mobile relays [4,6], aerial base stations [5,7], and information distributors and collectors [2,8]. On the other hand, a UAV–UAV link is more likely to have a better channel condition than a UAV–ground link, due to higher LoS probability [6].
Owing to the high flexibility and low deployment cost, UAV-enabled communications provide promising solutions to a variety of problems [3,9]. For example, the world’s leading industrial companies, such as Facebook, Google, and Qualcomm, are investing in developing services that can provide high-speed Internet in the air through UAVs [2]. Furthermore, UAVs can be integrated with various technologies in wireless networks [10]. Recently, advanced technologies, such as non-orthogonal multiple access (NOMA), millimeter-wave (mmWave), and terahertz (THz), have been applied to UAV-enabled communications under various scenarios. The basic idea of the NOMA technique is to allocate non-orthogonal resources among the users at the cost of increased receiver complexity, which is required for separating the non-orthogonal signals [11,12,13]. We can support massive devices more over the UAV by the UAV-enabled communications scenarios adopting NOMA. More devices can be served by adopting NOMA in UAV-enabled communications systems [14]. Both the mmWave and THz bands provide a wide bandwidth to support a high data rate in UAV-enabled communications [15]. However, UAV systems typically have strict size, weight, and power constraints [6]. These constraints affect the flight time, durability, and communication performance. In particular, UAVs consume propulsion energy to support mobility, which is typically several times higher than the communication energy, in addition to transceiver power consumption. A UAV at high altitude typically forms LoS links to ground nodes; however, UAV–ground channels are occasionally blocked by trees and skyscrapers in urban areas, which may degrade the communication performance. Due to size and power limitations, UAVs have also faced limitations in adopting advanced technologies that can support high data rates and an ever-growing number of devices [9]. Those problems can be alleviated if wireless channels become more reliable and less power-consuming. This necessitates a new communication paradigm, that is controllable or reconfigurable wireless environments.
Mobile communications systems are usually designed and optimized in the transmitter and receiver, which constitutes the termination nodes of a communication link. The primary goal of the system design is to compensate for the wireless channel between the transmitter and receiver, on the premise that artificial control of the wireless channel is impossible. If we are able to control the wireless channel, however, we can expect a significant performance improvement in the communications system. Recently, numerous studies have been conducted to optimize the wireless channel, as well as the transmitter and receiver. Wireless environments created using this approach are called smart radio environments (SREs) or intelligent radio environments to emphasize the fundamental differences from historical designs and optimization criteria [16,17,18,19,20,21,22,23]. Intelligent reflecting surfaces (IRSs) [24], also known as reconfigurable metasurfaces [22], smart large intelligent surfaces [23], large intelligent surfaces [25,26,27], or reconfigurable intelligent surfaces [28], are accepted as a promising technology that realizes SREs. In this study, the term “IRS” will be used as a representative of these terminologies.
The IRS has recently attracted attention as a core technology for next-generation wireless communications [29,30], as it can control the wireless propagation environment. The IRS can be viewed as a continuous surface of reflective elements with successively induce phase shifts and individual reflection coefficients. The reflective elements can be controlled using mechanical operations, special materials (e.g., graphene), and electronic devices (e.g., positive–intrinsic–negative diodes) [31]. The capability of the IRS that reflects and controls incident signals enables shaping the wireless propagation environment. This contrasts with the traditional approach that mitigates the harmful effects of the wireless channel at the transmitter and receiver sides instead of changing it. The IRS uses passive elements and serves as an artificial two-dimensional metasurface. It does not require analog–digital converters and power amplifiers. From the perspective of electromagnetic theory, the IRS can control the amplitude and phase of the electromagnetic waves that collide with a planar array, thereby changing the direction and intensity of the reflective waves. Consequently, the IRS can perform anomalous reflection/diffraction, absorption, polarization manipulation, beam focusing, beam splitting, and multi-beam collimation. From the perspective of communication technology, space modulation, encoding, and multi-stream transmission can be realized by the IRS [16,17,18,19,20,21,22]. In particular, the IRS can generate additional signal paths with a desired direction, amplitude, and phase with low noise amplification. Accordingly, the IRS can convert non-LoS (NLoS) channels to LoS channels and alleviate strong interference channels. As a result, the use of the IRS is expected to support highly efficient (in terms of spectrum and energy), secure, reliable, and flexible designs for future wireless networks [27,32].
The use of the IRS will improve the performance of existing wireless communications systems by enabling a greater degree of freedom in the control of wireless channels. More specifically, the IRS can be used to increase coverage, increase the data rate, suppress interference, facilitate beamforming, and step up physical-layer security (PLS) in response to randomly fluctuating wireless channels in real-time. A real-time-adjustable IRS can be used to mitigate and eliminate the multipath and Doppler effects caused by a mobile transmitter/receiver [33]. IRS-enabled systems provide a more energy-efficient alternative than conventional multi-antenna amplification and delivery relay systems [34]. Actually, the operation of the IRS is similar to that of a half-duplex relay, in that it is based on a manual beamforming at an intermediate point of the channel [35,36,37]. Unlike active relays based on signal regeneration and amplification, however, the IRS is more energy-efficient and cost-efficient, because it operates passively without requiring radio frequency chains comprising amplifiers, filters, mixers, tuners, and detectors. Therefore, the IRS can primarily change the phase of the received signals, although it can also adjust the amplitude of the received signal at the cost of higher complexity.
Recently, there have been many studies on IRS technology. In [38], the authors investigated the use of IRSs for SREs, wherein key applications, advantages over existing technologies, hardware architectures, and signal models for IRS-enabled systems were presented. Reference [29] discussed the implementation issues of the IRS, highlighted future research direction of the IRS and its role in 6G communications, and classified research works related to the technology. In [22], the authors presented the potential needs and applications of machine learning (ML) to IRS tasks. The authors of [17] pointed out the main problems in the design and implementation of IRS-enabled communication systems.
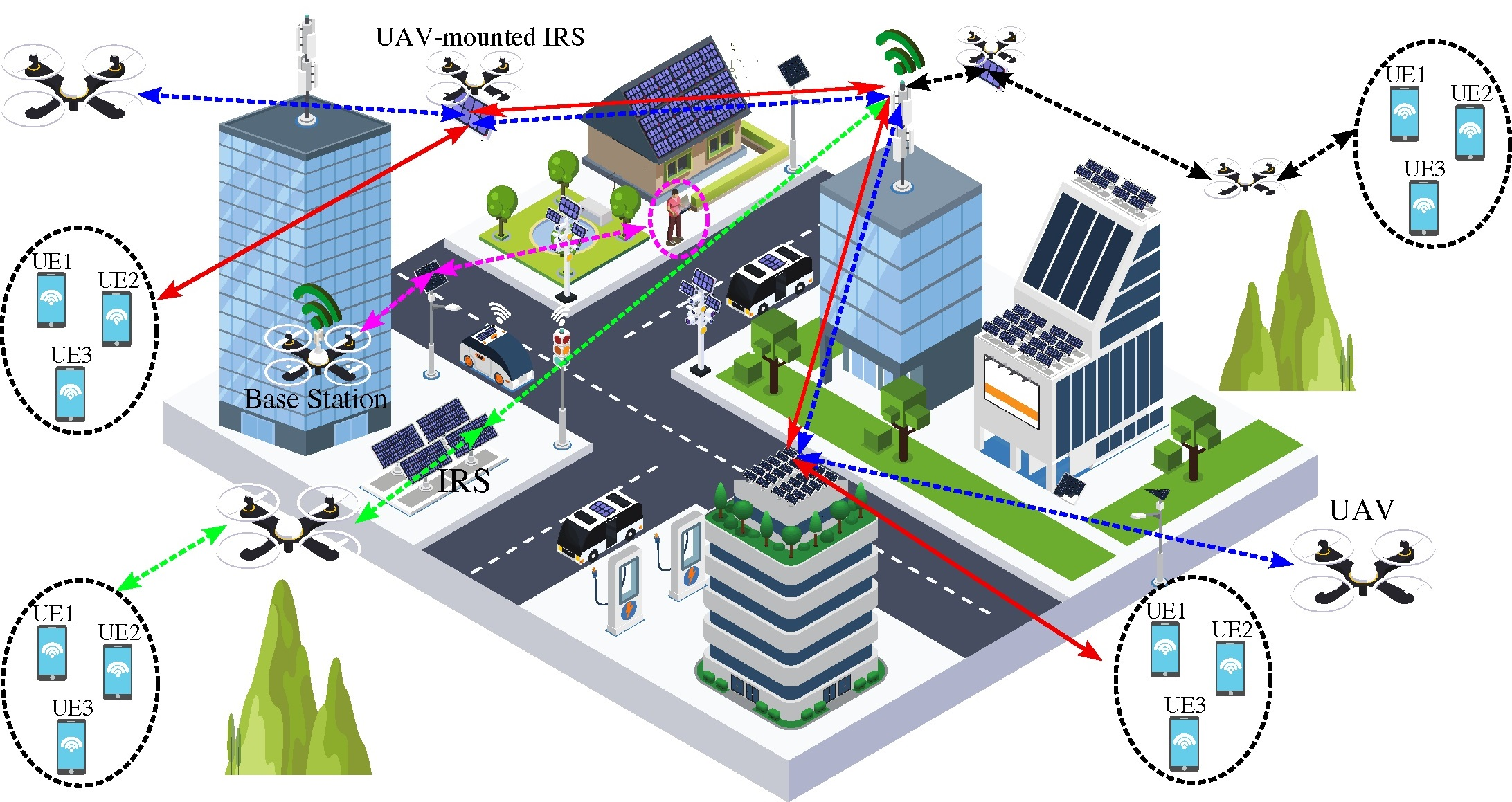
IRS-assisted UAV communications, which incorporate IRSs into UAV communications, is expected to overcome the aforementioned limitations and problems of UAV communications and further provide energy-efficient communications to IoT networks [39]. First of all, the easy installation of an IRS and a conformal geometry allow the IRS to be installed on the front of buildings. An IRS coated on a high-rise building is likely to establish an LoS link with a UAV and with ground users owing to its high altitude and shorter distance. Accordingly, the reflective LoS links created by the IRS help signals bypass propagation obstacles between the UAV and ground users. The IRS can also be installed on indoor walls or ceilings to serve users in blocked regions [40]. Another application can deploy an IRS on an aerial platform, i.e., UAVs, to help create bypassing LoS links between the ground base station (BS) and users. Figure 1 illustrates a terrestrial communications system with UAV-mounted IRSs, which is one of the application scenarios of IRS-enabled UAV communications. To provide a reliable power supply and stable control of the UAV-mounted IRSs, UAVs can be connected to other mobile platforms, such as ground BSs or vehicles with stable power supplies. The IRS on the UAV provides 360-degree panoramic reflective links toward the ground to the users and, thus, can support communications between the BS and users on the ground.
IRS-assisted UAV communications can generally increase the data rates of nearby users and expand network coverage, thereby reducing the the number of cellular BSs and enabling energy-efficient communications systems. More specifically, the benefits and the main design considerations of IRS-assisted UAV communications can be summarized as follows:
- In the case of link interrupt or performance degradation due to blockage of the LoS, it is possible to establish another LoS link bypassing the IRS. Therefore, the UAV-IRS systems can extend the coverage and improve the communication performance of users.
- When the IRS is mounted on a UAV, its position can be dynamically changed according to the movement of the UAV. Compared with the ground IRS on a fixed surface, the mobility of UAVs provides a degree of freedom in the IRS placement.
- When an IRS is mounted on a UAV, both the transmitter and receiver can establish an LoS link, thereby achieving full-angle reflection and extending the wireless coverage.
- The IRS-assisted UAV communications provides improved security, as well as coverage expansion. In particular, the UAV can create a hot zone by generating artificial noise to protect legitimate users from eavesdroppers and external jamming attackers [41].
- IRS-assisted communications can operate in the mmWave or THz band, thereby enabling extremely wideband services. mmWave and THz links are very vulnerable to path blocking and loss [42]. However, the detrimental effect can be effectively compensated for by the reconfigurability of the IRS and the mobility of the UAV.
- Optimization of the IRS-assisted UAV communications system enables energy efficiency management [43], for which various factors can be considered. The main factors for energy efficiency management include phase control of the IRS, the number of planar array components, and the trajectory and altitude of the UAV.
Both the UAV and IRS described above are accepted as key enablers for next-generation communications systems, and they can be effectively combined to realize various services with innovative spatial configurations and further improve the communication performance [43,44]. At the same time, there are still many issues arising from the integration and constraints to be overcome, and various studies are being performed. Technical surveys on the IRS and UAV can be found in [45,46], respectively. In this article, we aim to present a comprehensive survey of IRS-assisted UAV communications systems, including research trends, important issues, technical challenges, and promising applications in future wireless networks. The remainder of this article is organized as follows. Section 2 describes various scenarios of IRS-assisted UAV communications. In Section 3, we provide an overview of relevant studies from the perspective of several performance criteria. Section 4 discusses the optimization methodologies used for developing IRS-assisted UAV communications systems. Section 5 highlights some technical challenges to be investigated in the future. Finally, conclusions are drawn in Section 6.
2. Scenarios of IRS-Assisted UAV Communications
Research on IRS-assisted UAV communications systems is being conducted from various perspectives. References [10,16,18,31,40,47,48,49,50,51,52,53,54,55] described the implementation issues of IRS technology under various scenarios that integrate IRSs and UAVs to realize IRS-assisted UAV communications. In this section, we classify these scenarios into five representative ones according to the installation point of IRSs and the the role of UAVs. IRSs can be installed on the outer wall of a building on the ground to improve the performance of terrestrial and/or aerial communications. If no LoS link is secured in UAV communications, it is possible to build a bypassing LoS using the IRS. The IRS can also be mounted on a UAV, which allows the IRS to be intelligently and dynamically adjusted according to the movement of the UAV. This will also increase the probability of establishing an LoS link between the transmitter and receiver, thereby expanding wireless coverage. UAVs can perform various functions in communications systems. The UAV may serve as a moving BS or relay for supporting terrestrial and aerial communications. In multi-UAV environments, the UAV can also be a user that is served by a terrestrial or aerial BS.
Figure 2 illustrates the five representative scenarios of IRS-assisted UAV communications. The scenarios are first classified according to the installation location of the IRS, and then, each class is divided into specific scenarios according to the role of the UAV. Scenarios (a)–(c) correspond to the case where IRSs are installed on the outer walls of buildings on the ground, whereas Scenarios (d)–(e) correspond to the case where IRSs are mounted on UAVs. In Scenario (a), UAVs function as aerial BSs, which will be effective when terrestrial BSs are not available (e.g., disaster areas, remote areas, and shadowed areas). The IRS installed on the wall of a building can establish a reflective LoS link between the aerial BS and users on the ground. The control of the reflection at the IRS can be carried out with a very low power consumption through phase adjustment of the signals incident to the IRS [56]. In Scenarios (b) and (d), UAVs act as moving relays for supporting communications between a BS and users (ground users or other UAVs). Both the UAV with the IRS and the UAV without the IRS can serve as a relay in these scenarios, and the IRS either attached to the wall of a building or mounted on a UAV can be used to facilitate the relaying functionality. In particular, relaying with the UAV-mounted IRS does not incur any additional noise, and thus, it is energy efficient. Furthermore, due to the nature of reflective surfaces, the connected LoS links that pass through one or more reflectors are allowed to share the same frequency band, thereby improving the spectral efficiency [48]. In Scenarios (c) and (e), UAVs without IRSs are users served by a BS, and IRSs support communications between the BS and users. The IRS either attached to the wall of a building or mounted on a UAV helps communications between the BS and users. The UAV equipped with the IRS will be used to enhance various communication performance, such as signal amplification and coverage extension. The network configurations required for various scenarios are different, and various studies are in progress to optimize the system for each scenario. Furthermore, multiple scenarios can be combined together according to various applications of IRS-assisted UAV communications.
3. Overview of Previous Studies on IRS-Assisted UAV Communications
In this section, we provide an overview of previous studies relevant to IRS-aided UAV communications. Most of the works focused on the optimization of various parameters, such as UAV altitude and speed, IRS location, IRS phase shift, and beamforming weights, to achieve a certain goal. Primary performance criteria include spectral efficiency, energy efficiency, and security. We categorized the previous works according to the main performance criteria and provide technical features of each work in the following subsections.
3.1. Improvement of Spectral Efficiency
In this subsection, we describe the system models, specific technologies adopted in the system, and optimization algorithms proposed in previous studies for improving the performance related to the spectral efficiency. In particular, it is important to incorporate appropriate communication technologies, such as mmWave, THz, NOMA, and simultaneous wireless information and power transfer (SWIPT), into IRS-assisted communications systems to maximize the spectral efficiency. NOMA transmission is distinguished from conventional orthogonal multiple access in that devices can be allocated to the same time/frequency resources. The key feature of the NOMA technique is based on interference management to share the resources, which enables enhancing the spectral efficiency. SWIPT, which exploits the same radio signals to transfer both information and energy using time switching or power splitting of signals, can prolong UAVs’ battery lifetime and improve the spectral efficiency [57]. Table 1 briefly summarizes the main features of the previous works that will be introduced in this subsection. A scenario, in Figure 2, associated with each work is also indicated in the table.
The authors of [58,59] aimed to maximize the sum rate by applying the NOMA technique to IRS-assisted UAV communications systems. Numerical results verified the effect of IRS on the performance of UAV communications, as well as on the performance of NOMA algorithms. In [58], NOMA decoding scheduling was considered for different user groups to maximize the sum rate, and an interference elimination algorithm was proposed. Reference [59] adopted deep reinforcement learning (DRL) to optimize the UAV trajectory while avoiding environmental obstacles. Reference [60] attempted to maximize the data rate of strong users while ensuring a target rate of weak users by optimizing the IRS phase shift and horizontal position of the UAV in a multiple-input single-output NOMA system. References [56,61] aimed to improve the average rate of an IRS-assisted UAV system in an urban environment. Both the LoS and NLoS channel models were considered for each link. In particular, ref. [56] considered an NLoS channel between the UAV and a user, and [61] considered multiple channels between the UAV and users.
The authors of [62] attempted to maximize the average achievable rate in a SWIPT system, wherein the intrinsic tradeoff between the spectral efficiency and energy efficiency was treated by considering the power-splitting ratio. Reference [63] aimed to maximize the minimum of the average achievable rates of all user equipment (UE) in an IRS-assisted UAV system operating in the THz spectrum. To achieve the goal, the authors proposed the optimization of the UAV trajectory, IRS phase shift, power control, and sub-band allocation of the THz spectrum. The proposed algorithm was shown to reduce the energy consumption of the UAVs, as well as improve the minimum achievable rate. Orthogonal frequency division multiple access (OFDMA) technology was applied to the IRS-assisted UAV system in [64]. The proposed approach achieved the maximum sum rate by jointly optimizing the trajectory of the UAVs and resource allocation in the IRS. The results confirmed that the size of the IRS affects the UAV trajectories and the achievable rates of users in the network.
The authors of [65] proposed a method to minimize system throughput while satisfying the QoS of users. The system considered multi-antenna UAVs and ensured the energy requirements of energy-harvesting receivers. The IRS was used as a relay to help improve the communication performance. Reference [66] proposed a dual-UAV structure with a master UAV and a slave UAV to maximize the cumulative system throughput. Specifically, the slave UAV equipped with an IRS was adopted to strengthen the signals for the master UAV. The authors of [67] examined the channel capacity maximization and showed that the change in channel capacity due to phase error depends on the number of element antennas in the IRS.
3.2. Improvement of Energy Efficiency
Energy efficiency is a crucial factor for the implementation of all systems. For wireless communications systems, in particular, the energy efficiency exerts a significant effect on the system performance and device size. Therefore, the energy efficiency is accepted as one of the most fundamental and important performance criteria, together with the spectral efficiency. In this subsection, we introduce the research trends of the IRS-assisted UAV communications systems from the perspective of energy efficiency. Table 2 briefly summarizes the main features of the previous works relevant to the improvement of energy efficiency. Reference [68] investigated how to maximize the received power of the ground users using a single UAV and multiple IRSs. It was shown that the energy efficiency of such systems is highly dependent on the number of elements in the IRS. Reference [69] aimed to minimize UAV power consumption using a decaying deep Q-network (D-DQN), which was devised based on the deep Q-network (DQN) algorithm with the concept of a decaying learning rate. Furthermore, the proposed algorithm was used to compare the performance of orthogonal multiple access and NOMA systems.
The authors of [70] maximized the energy efficiency of a multicell uplink system with the help of an aerial BS, i.e., a UAV-mounted IRS. The proposed system was shown to significantly improve the energy efficiency compared to a conventional system with amplify-and-forward relays in UAVs, especially when the optimal transmit power and a large number of reflective elements were implemented. Similarly, Refs. [70,71,72] aimed to maximize the energy efficiency of the IRS-assisted UAV communications systems. The system proposed in [71] provides communication and computing services to the ground terminals by operating UAVs as mobile edge computing (MEC) servers in the air. However, UAVs should operate in an adverse environment where UAV-to-ground links are frequently blocked by ground obstacles, which may result in the long latency of tasks. To address this issue, it is essential to configure the IRS so that the propagation channels between the UAV and ground terminals are improved. As a result, Reference [71] showed that IRS-assisted UAVs have great potential for improving the performance of MEC, as well as pure wireless communications.
To improve the secrecy energy efficiency in an IRS-assisted UAV system with eavesdroppers, the authors of [72] argued for the need for the optimization of the IRS phase shift, UAV trajectory, user association, and transmit power. The authors of [73] considered a resource allocation strategy and the UAV trajectory and velocity in an alternating algorithm that was proposed to minimize the average total power consumption of the system. Reference [74] aimed to improve UAV connectivity and energy efficiency by maximizing the number of available devices during the activation period and verified the possibility of maximizing service performance with large-sized IRSs. An optimization approach that minimizes the weighted total energy consumption of vehicles with transmit power constraints and aerial road side units was proposed in [75]. Specifically, an IRS network was devised, and the efficiency of the optimized dual-IRS-enabled radio transmission was boosted by using time-slot scheduling and task allocation. Reference [76] aimed to minimize the transmit power of UAVs through UAV placement, IRS phase shift, user association, and IRS association adjustment. To reduce the total power consumption of all UAVs, a novel framework of visible-light-communication-enabled UAV multicell networks was proposed, leveraging widespread IRSs. The results showed that the proposed system efficiently reduces energy consumption as compared to a counterpart without IRSs.
The work in [77] presented a novel approach of heterogeneous networks (HetNets) supporting dual connectivity, by adopting multiple UAVs as manual relays with IRSs. The authors of [47] investigated how to improve the coverage and reliability of UAV communications systems using IRS-assisted UAVs. To model the statistical distribution of IRS-enabled ground-to-air links, an approximation method was developed for the probability density function of the instantaneous signal-to-noise ratio (SNR).
3.3. Improvement of Security
Security is an important issue of wireless communications systems due to the broadcasting nature of wireless signals. Although UAVs have many potentials, their capabilities raise concerns regarding system security at the same time. Previous studies showed that generating random radio channels enables UAVs to protect data transmission [78] and that with more IRS element antennas, a higher security can be achieved [79]. In this subsection, we introduce the research trends of the IRS-assisted UAV communications systems from the perspective of security. The secrecy rate, which is one of the most fundamental metrics to measure the security performance, is defined as the difference between the rate of the legitimate channel and the maximum rate of the eavesdropping channel [80]. Table 3 briefly summarizes the main features of the previous works relevant to the improvement of security.
In [81,82], the authors examined how to overcome obstacles through proper placement of UAV BSs and IRSs in the presence of authorized users and illegal eavesdroppers. The authors aimed to maximize the secrecy rate through the optimal placement and design of the beamforming weight matrix. The results were extended in [83] by additionally considering the power control of the UAV to maximize the average secrecy rate. Unlike other studies, Reference [81] analyzed the probability of LoS link generation depending on the existence of an IRS in UAV communication systems.
In [84], a secure transmission problem was investigated in an IRS-assisted UAV mmWave communications system. The authors utilized a deep deterministic policy gradient (DDPG) framework to maximize the sum secrecy rate of all legitimate users and proposed a novel and effective paired DRL algorithm. The author of [85] considered the joint and channel-state-information (CSI)-robust design of the UAV trajectory, IRS passive beamforming, and legitimate transmit power to maximize the average worst-case secrecy rate of the communications system. The authors showed that the use of IRS helps substantially improve the performance of the secrecy rate.
3.4. Improvement of Other Performance
In addition to the above-mentioned performance improvements, various aspects of the performance the the IRS-assisted UAV system can be improved, including reliability enhancement and latency reduction. This subsection introduces a few such works, and Table 4 briefly summarizes the main features of the works.
The studies in [40,86] considered scenarios where an IRS-assisted UAV system supports strict constraints of ultra-reliable low-latency communications (URLLC), which is one of the 5G use cases. URLLC requires high reliability when transmitting short data packets between devices [91]. To overcome the interference of dense networks, the authors of [86] proposed using the zero-forcing and time division multiple access methods, where each UAV can serve multiple users in its own cluster. The authors proposed and validated an optimization framework (in terms of UAV deployment), power allocation in the macro BS (MBS), phase shift in the IRS, and block length for URLLC [40]. To minimize decoding errors for short packets, the author considered manual beamforming, which optimizes the block length and UAV location. It was shown that the reliability improves as the number of IRS elements increases and that the location of the UAVs is important to achieve high reliability for short data packets. Reference [87] analyzed how signal gain varies according to the IRS tilt angle in the IRS-assisted UAV communications system. It was shown that the IRS gain is maximized when the tilt angle, IRS altitude, and distance from the BS are optimally selected. Reference [88] presented an algorithm for minimizing the weighted sum BER and the corresponding improvement in the signal accuracy in the IRS-assisted UAV system. In [89], the phase shift matrix of UAVs, transmission scheduling, and IRS elements were optimized to minimize the expected sum of the age of information (AoI). In this study, a novel relay system for remote IoT wireless networks was proposed by integrating UAVs and IRSs. Reference [90] investigated the symbol error rate (SER) and ergodic capacity in a system designed to maximize the SNR. The authors verified that the asymptotic SNR is within the region between the derived boundaries and approaches the boundaries as the number of reflective elements increases.
4. Optimization Algorithms Used for IRS-Assisted UAV Communications
Most of the previous works introduced in Section 3 involve optimization to maximize the gains from using UAVs and IRSs. In this section, we introduce methods used to optimize the IRS-assisted UAV communications systems. The approaches for optimization are largely divided into traditional optimization algorithms and ML algorithms. Both the traditional optimization and ML are sophisticated technologies that are used to analyze and draw meaningful inference from data. Basically, both methods are tools to solve complex problems using mathematics with data and computers. However, there are some differences between traditional optimization and ML. The traditional optimization approach leverages mathematical models and resorts to algorithms to find optimal or suboptimal solutions for given problems. ML fundamentally gives a complex and interconnected set of decisions, although the predictions resulting from ML can be used to guide specific decisions. Therefore, when establishing a model based on limited data, traditional optimization can provide the best solution and can easily be adapted to changes in the problem. The ML approach can be more efficient when prediction is needed for outcomes outside the data range [92]. When ML learns based on insufficient or inaccurate data, its performance should always be evaluated using the loss function due to the deterioration of prediction accuracy or overfitting [93].
4.1. Traditional Optimization Algorithms
It is important to optimize suitable parameters for UAVs and IRSs to improve the system performance. Previous studies showed that crucial factors for UAVs are placement, trajectory, and moving speed, and those for IRSs are the number of elements and phase shift. The detailed description of the various parameters and traditional optimization algorithms for IRS-assisted UAV communications systems can be found in [94].
4.2. ML Algorithms
ML is a promising technology that learns from huge data sets and plays an important role in automating systems and devices in response to external conditions. Both deep learning (DL) and reinforcement learning (RL) belong to ML, in that they learn autonomously and enable a computer to develop rules on its own to solve problems. In particular, DL is a hierarchical learning process that learns from vast amounts of raw data and applies the progressed learning to new data [95]. It learns an algorithm to find a specific pattern in raw data through an artificial neural network that mimics the neuron structure of the human brain. The pattern is narrowed by learning through successive cycles, and the prediction is improved in each cycle. On the other hand, RL continues to dynamically learn and coordinate the behavior for the best reward [96]. It receives feedback on the results of various state changes and learns to obtain the best reward. It always revises, transforms, and reinforces the algorithm through much learning until it gives the best result. DL based on complicated raw data tends to result in the wrong classification [97], whereas RL is not adequate when the data dimension is large and the environment is anomalous [98]. To make up for the weak points of DL and RL, deep reinforcement learning (DRL) was proposed by incorporating a deep neural network (DNN) into RL. Recently, various studies have been conducted to apply ML techniques to improve the performance of wireless communications systems with UAVs or IRSs. However, only a few studies considered IRS-assisted UAV communications systems. This subsection describes research works for solving complex optimization problems in IRS-assisted UAV communications systems from the viewpoint of the adopted ML techniques, which can be divided into DL with neural networks and RL.
The authors of [69] considered an integration of NOMA and IRS-assisted UAV communications systems. They aimed to minimize the power consumption of the system by optimizing the UAV movement, IRS phase shift, and power allocation for data transmission between UAVs and users. To achieve the goal, the authors developed and proposed ML algorithms based on a D-DQN. Unlike the conventional DQNs, which do not jointly solve the non-convex problem, the proposed D-DQN technique was found to optimize minor constraints, resulting in reduced power consumption. Reference [58] considered an uplink NOMA with IRSs for air-to-ground communications. The formulated problem was to maximize the network sum rate, while ensuring the combat safety of UAVs and satisfying minimum data rate requirements for both UAVs and ground users. The authors proposed sample-efficient DRL algorithms to simultaneously optimize the UAV trajectory IRS configuration and power control. In addition, they proposed a DRL algorithm robust to uncertainties to guarantee the worst-case performance. The two proposed DRL algorithms were shown to outperform the existing algorithms in terms of learning efficiency and robustness. In [65], the authors considered a UAV-mounted IRS system to support the strict constraints of URLLC. In this study, UAVs equipped with IRS panels serve as relays that reflect signals from MBSs to all users of the network. Due to the highly nonconvex and complex nature of the formulated optimization problem, they adopted a DNN to solve the optimal UAV deployment.
A UAV-based IoT network supporting an IRS was proposed in [66], wherein the throughput was aimed to be maximized by jointly optimizing the UAV trajectory and transmit power under battery capacity, same-side distance constraint, and other practical constraints. To solve the established optimization problem in an accurate and efficient manner, a modified multi-agent DRL (MADRL)-based algorithm called the pre-activation penalty multi-agent deep deterministic policy gradient was proposed. Reference [84] aimed to deliver robust and secure IRS-assisted UAV communications with incomplete CSI. In particular, UAV active beamforming, coefficients of IRS elements, and UAV trajectories were jointly optimized to maximize the sum secrecy rate of all legitimate users in the presence of multiple eavesdroppers. A deep deterministic policy gradient (DDPG) framework was adopted to solve the accurate CSI estimation problem. In [89], the authors considered a UAV-mounted IRS system with a single BS that communicates with various IoT devices on the ground. The authors focused on optimizing the UAV altitude and phase shift of the IRS to minimize the AoI, which indicates the latency of the state-update system and application. Because it is difficult to analyze the activation pattern of IoT devices, the authors devised a DRL-based proximal policy optimization (PPO) algorithm to understand the randomness of IoT devices’ behavior. In [77], the authors considered multiple UAV-mounted IRSs for a HetNet supported by dual connectivity. The authors developed a DQN-based distributed algorithm to optimize the trajectory and speed of UAVs, phase shift of IRS, subcarrier allocation, and active beamforming at BSs. The authors of [99] proposed a DL-based channel-tracking mechanism to track the time-varying channel. The proposed algorithm consists of two modules: channel pre-estimation and channel tracking. The pre-estimation was achieved by using a DNN with offline training on a pre-collected training dataset. The tracking module was designed using a stacked bidirectional long short-term memory that can track the CSI over a time-varying channel in a data-driven manner. The proposed channel-tracking algorithm was shown to provide fast convergence during the offline training phase. The author of [100] proposed a resource allocation model for the aerial IRS based on a cooperative DNN rather than a universal DNN. As the proposed collaborative and distributed learning framework makes decisions by considering the information on the entire environment, it provides better performance and reliability.
In summary, research on the application of ML techniques in IRS-assisted UAV communications systems is still in its early stage. Nevertheless, the previous works introduced above confirmed that ML is promising to optimize various parameters of the complex IRS-assisted UAV communications systems. Table 5 summarizes the main features of the previous studies based on ML for IRS-assisted UAV communication systems.
5. Research Challenges of IRS-Assisted UAV Communications
As introduced in the previous section, there have been many studies on IRS-assisted UAV communications systems, and the results confirmed the potential of the technique in future wireless communications. However, there are practical issues and research challenges that need to be addressed to realize and advance IRS-assisted UAV communications systems. This section presents some of them.
5.1. Channel Estimation
First of all, accurate CSI estimation is of paramount importance to realize performance gain with joint designs of UAVs and IRSs [18,22,30,42]. In general, the accuracy of the channel estimation can be improved at the cost of increased training overhead and power consumption, especially when the IRS is large [101]. Therefore, it is worth pursuing ways to improve the accuracy of channel estimation, while minimizing the training overhead and power consumption at the same time.
Wireless channels are affected by many factors, such as fading, scattering, and shadowing. In IRS-assisted UAV communications systems, various external parameters will also affect the channel because UAVs fly in the air [102]. Typically, the direct link between the UAV and the user, the number of elements in the IRS, the location of the IRS, and the material on the metasurface affect the effective wireless channel [22]. Furthermore, UAV mobility in real-world scenarios complicates channel modeling. Jittering, as well as the movement of UAVs can cause errors in location estimation and channel estimation [103]. Therefore, a thorough evaluation and study of the channel model should precede to identify and understand the effect of various factors in various application scenarios. Furthermore, studies on channel estimation algorithms robust to external factors will be necessary.
5.2. IRS Phase Shift
The computation of optimal phase shift is essential for IRSs, which are either attached on a fixed wall or mounted on a moving UAV. Since the IRS does not have computing capability, a separate computing node is required for computing the phase shift. This implies that data transfer between the IRS and the computing node is necessary [67]. The channel between the IRS and the computing node will experience fading and delay, especially when the IRS is mounted on a UAV [104,105]. Therefore, studies on countermeasures against the channel fading and delay are important to establish a stable link between the IRS and the computing node.
5.3. Reflection Efficiency
Securing the high reflection efficiency of IRSs is another important issue for practical implementation [106,107]. The location and orientation of the IRS are main factors that determine the reflection efficiency, and thus, they should be carefully designed [108]. On the other hand, to compensate for long-distance path loss, it is necessary to improve the reception performance by using large IRSs. However, the use of large IRSs will increase the cost and cause several difficulties, such as size and weight [109]. Therefore, it is necessary to study an appropriate tradeoff between the number of elements in the IRS and the reception performance.
5.4. UAV Energy Consumption
Energy consumption plays an important role in the design of the entire system. However, in most studies on IRS-assisted UAV communications systems, the battery capacity of UAVs was not considered. Even when it was considered, practical scenarios and constraints were not reflected. The authors of [110] pointed out that UAV implementation requires realistic assumptions, such as payload weight, velocity, weather conditions, and UAV temperature after a certain period of working [111]. It is required to establish practical energy models for UAVs. In addition, there is a need for efficient charging techniques, as well as efficient energy usage. In particular, wireless power transfer for UAV charging is a promising area under development [112]. Wireless charging can work in a contact or non-contact manner by attaching a separate charging unit to the UAV. A charging technology based on laser forming is also a promising research topic to secure flight time [113,114]. Hence, it is necessary to study various models of UAV energy consumption and charging technologies to ensure complete automation and flight time [115].
5.5. Security Vulnerabilities
UAVs can easily be detected by visual or radar scanning, which makes them susceptible to jamming attacks. Therefore, research on safe transmission technologies is required to enhance the security of the IRS-assisted UAV communications system [116]. As anti-jamming techniques, cooperative jamming, as well as conventional beamforming will be effective to degrade the quality of eavesdropping channels [117,118]. In addition, it is required to make the CSI estimation protected from and robust to the jamming attacks and reflect incomplete CSI on the eavesdropping channel in the design of the PLS system [119].
5.6. Environmental Factors
Most studies assumed stable UAV flight and a fixed user location. However, in practice, UAVs typically experience channel estimation errors and unstable transmissions, which should not be ignored because of inevitable jitters caused by airflow and vibration [120]. Consequently, the benefits from beamforming design cannot be fully utilized. Environmental factors, such as rain and wind, can change the speed and trajectory of UAVs, which may result in safety issues and performance degradation [121]. Research on these environmental factors remains a challenge.
6. Conclusions
The article provided an overview of the current status of advanced technologies for IRS-assisted UAV communications, which is important to realize NTNs for future wireless communications systems. We first identified several scenarios for which IRSs can be incorporated into UAV communications systems. The high degree of freedom in the system configuration makes the IRS-assisted UAV communications systems a promising solution to enable advanced services in future wireless systems. We then investigated recent advances in IRS-assisted UAV communications in terms of the design goal, such as spectral efficiency, energy efficiency, and security. Through the investigation, we confirmed the benefits and performance improvement resulting from the combination of the UAV and IRS, as compared to the advantages that each of the IRS and UAV can bring. It was also shown that optimization of various parameters, such as UAV altitude and speed, IRS location, IRS phase shift, and beamforming weights, is essential to maximize the gain. We also discussed optimization approaches adopted in the previous works, particularly focusing on ML algorithms. Because a wide variety of variables are usually involved in IRS-assisted UAV communications systems, it is important to optimize them to improve the system performance. As methodologies to solve the problems, traditional optimization and ML were introduced together. The ML algorithm, which was judged to be more suitable for solving complex problems, was especially elaborated. Although the previous studies showed great potential of IRS-assisted UAV communications, there are still many technical issues and research challenges. We highlighted channel estimation, IRS phase shift, reflection efficiency, UAV energy consumption, security vulnerabilities, and environmental factors as future research challenges. In particular, to realize performance gain with joint designs of UAVs and IRSs, it is of paramount importance to improve the accuracy of channel estimation, while minimizing training overhead and power consumption at the same time. The channel estimation should also be designed to be robust to external factors, such as UAV mobility and jittering.
Funding
This work was supported by the National Research Foundation of Korea (NRF) Grant funded by the Korean Government (Ministry of Science and ICT (MSIT)) under Grant 2019R1A2C1084834 and Grant 2017R1A5A1015596.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- You, X.; Wang, C.-X.; Huang, J.; Gao, X.; Zhang, Z.; Wang, M.; Huang, Y.; Zhang, C.; Jiang, Y.; Wang, J.; et al. Towards 6G wireless communication networks: Vision, enabling technologies, and new paradigm shifts. Sci. China Inf. Sci. 2021, 64, 110301. [Google Scholar] [CrossRef]
- Li, R.; Wei, Z.; Yang, L.; Kwan, N.; Derrick, W.; Yang, N.; Yuan, J.; An, J. Joint trajectory and resource allocation design for UAV communications systems. In Proceedings of the 2018 IEEE Globecom Workshops, Abu Dhabi, United Arab Emirates, 9–13 December 2018; pp. 1–6. [Google Scholar]
- Wong, V.W.; Schober, R.; Ng, D.; Wang, L.-C. Key Technologies for 5G Wireless Systems; Cambridge University: Cambridge, UK, 2017. [Google Scholar]
- Xiao, L.; Xu, Y.; Yang, D.; Zeng, Y. Secrecy energy efficiency maximization for UAV-enabled mobile relaying. IEEE Trans. Green Commun. Netw. 2020, 4, 180–193. [Google Scholar] [CrossRef] [Green Version]
- Mozaffari, M.; Saad, W.; Bennis, M.; Debbah, M. Unmanned aerial vehicle with underlaid device-to-device communications: Performance and tradeoffs. IEEE Trans. Wirel. Commun. 2016, 15, 3949–3963. [Google Scholar] [CrossRef]
- Zeng, Y.; Zhang, R.; Lim, T.J. Throughput maximization for UAV-enabled mobile relaying systems. IEEE Trans. Commun. 2016, 64, 4983–4996. [Google Scholar] [CrossRef]
- Sun, X.; Shen, C.; Ng, D.W.K.; Zhong, Z. Robust trajectory and resource allocation design for secure UAV-aided communications. In Proceedings of the 2019 IEEE International Conference on Communications (ICC), Shanghai, China, 20–24 May 2019; pp. 1–6. [Google Scholar]
- Zeng, Y.; Xu, X.; Zhang, R. Trajectory design for completion time minimization in UAV-enabled multicasting. IEEE Trans. Wirel. Commun. 2018, 17, 2233–2246. [Google Scholar] [CrossRef]
- Zeng, Y.; Zhang, R.; Lim, T.J. Wireless communications with unmanned aerial vehicles: Opportunities and challenges. IEEE Commun. Mag. 2016, 54, 36–42. [Google Scholar] [CrossRef] [Green Version]
- Nadeem, Q.-U.-A.; Kammoun, A.; Chaaban, A.; Debbah, M.; Alouini, M.-S. Asymptotic max-min SINR analysis of reconfigurable intelligent surface assisted MISO systems. IEEE Trans. Wirel. Commun. 2020, 19, 7748–7764. [Google Scholar] [CrossRef] [Green Version]
- Dai, L.; Wang, B.; Ding, Z.; Wang, Z.; Chen, S.; Hanzo, L. A survey of non-orthogonal multiple access for 5G. IEEE Commun. Surv. Tutor. 2018, 20, 2294–2323. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.; Qin, Z.; Cai, Y.; Gao, Y.; Li, G.Y.; Nallanathan, A. UAV communications based on non-orthogonal multiple access. IEEE Wirel. Commun. 2019, 26, 52–57. [Google Scholar] [CrossRef] [Green Version]
- Nguyen, H.V.; Kim, H.M.; Kang, G.-M.; Nguyen, K.-H.; Bui, V.-P.; Shin, O.-S. A Survey on non-orthogonal multiple access: From the perspective of spectral efficiency and energy efficiency. Energies 2020, 13, 4106. [Google Scholar] [CrossRef]
- Fu, M.; Zhou, Y.; Shi, Y. Intelligent reflecting surface for downlink non-orthogonal multiple access networks. In Proceedings of the 2019 IEEE Globecom Workshops, Waikoloa, HI, USA, 9–13 December 2019; pp. 1–6. [Google Scholar]
- Sultan, Q.; Kim, Y.-J.; Khan, M.-S.; Cho, Y.-S. Fast beam training technique for millimeter-wave cellular systems with an intelligent reflective surface. Sensors 2021, 21, 4936. [Google Scholar] [CrossRef] [PubMed]
- Renzo, M.D.; Zappone, A.; Debbah, M.; Alouini, M.-S.; Yuen, C.; Rosny, J.; Tretyakov, S. Smart radio environments empowered by reconfigurable intelligent surfaces: How it works, state of research, and road ahead. IEEE J. Select. Areas Commun. 2020, 38, 2450–2525. [Google Scholar] [CrossRef]
- Gong, S.; Lu, X.; Hoang, D.T.; Niyato, D.; Shu, L.; Kim, D.I.; Liang, Y.-C. Towards smart wireless communications via intelligent reflecting surfaces: A contemporary survey. IEEE Commun. Surv. Tutor. 2020, 22, 2283–2314. [Google Scholar] [CrossRef]
- Basar, E.; Renzo, M.D.; Rosny, J.D.; Debbah, M.; Alouini, M.-S.; Zhang, R. Wireless communications through reconfigurable intelligent surfaces. IEEE Access 2019, 7, 116753–116773. [Google Scholar] [CrossRef]
- Basar, E. Reconfigurable intelligent surface-based index modulation: A new beyond MIMO paradigm for 6G. IEEE Trans. Commun. 2020, 68, 3187–3196. [Google Scholar] [CrossRef] [Green Version]
- Björnson, E.; Özdogan, Ö.; Larsson, E.G. Reconfigurable intelligent surfaces: 3 myths and 2 critical questions. IEEE Commun. Mag. 2020, 58, 90–96. [Google Scholar] [CrossRef]
- Dajer, M.; Ma, Z.; Piazzi, L.; Prasad, N.; Qi, X.-F.; Sheen, B.; Yang, J.; Yue, G. Reconfigurable intelligent surface: Design the channel—A new opportunity for future wireless networks. Digit. Commun. Netw. 2020, 8, 87–104. [Google Scholar] [CrossRef]
- Gacanin, H.; Renzo, M.D. Wireless 2.0: Towards an intelligent radio environment empowered by reconfigurable metasurfaces and artificial intelligence. IEEE Veh. Technol. Mag. 2020, 15, 74–82. [Google Scholar] [CrossRef]
- Saad, W.; Bennis, M.; Chen, M. A vision of 6G wireless systems: Applications, trends, technologies, and open research problems. IEEE Netw. 2019, 34, 134–142. [Google Scholar] [CrossRef] [Green Version]
- Zhao, Y.; Zhao, J.; Zhai, W.; Sun, S.; Niyato, D.; Lam, K.-Y. A Survey of 6G Wireless Communications: Emerging Technologies; Springer: Cham, Switzerland, 2021. [Google Scholar]
- Strinati, E.C.; Barbarossa, S. 6G Networks: Beyond Shannon towards semantic and goal-oriented communications. Comput. Netw. 2021, 190, 107930. [Google Scholar] [CrossRef]
- Latva-aho, M.; Leppänen, K.; Clazzer, F.; Munari, A. Key Drivers and Research Challenges for 6G Ubiquitous Wireless Intelligence; University of Oulu: Oulu, Finland, 2019. [Google Scholar]
- Zhang, Z.; Xiao, Y.; Ma, Z.; Xiao, M.; Ding, Z.; Lei, X.; Karagiannidis, G.K.; Fan, P. 6G Wireless networks: Vision, requirements, architecture, and key technologies. IEEE Veh. Technol. Mag. 2019, 14, 28–41. [Google Scholar] [CrossRef]
- 6G The Next Hyper-Connected Experience for All; Samsung Research: Bengaluru, India, 2020.
- Zhao, J.; Liu, Y. A survey of intelligent reflecting surfaces (IRSs): Towards 6G wireless communication networks. arXiv 2019, arXiv:1907.04789v3. [Google Scholar]
- Zeng, M.; Li, X.; Li, G.; Hao, W.; Dobre, O.A. Sum rate maximization for IRS-assisted uplink NOMA. IEEE Commun. Lett. 2021, 25, 234–238. [Google Scholar] [CrossRef]
- Wu, Q.; Zhang, S.; Zheng, B.; You, C.; Zhang, R. Intelligent reflecting surface aided wireless communications: A tutorial. IEEE Trans. Commun. 2021, 5, 3313–3351. [Google Scholar] [CrossRef]
- Alwis, C.D.; Kalla, A.; Pham, Q.-V.; Kumar, P.; Dev, K.; Hwang, W.-J.; Liyanage, M. Survey on 6G frontiers: Trends, applications, requirements, technologies and future research. IEEE Open J. Commun. Soc. 2021, 2, 836–886. [Google Scholar] [CrossRef]
- Basar, E. Reconfigurable intelligent surfaces for doppler effect and multipath fading mitigation. Front. Commun. Netw. 2021, 2, 1–12. [Google Scholar] [CrossRef]
- Huang, C.; Zappone, A.; Alexandropoulos, G.C.; Debbah, M.; Yuen, C. Reconfigurable intelligent surfaces for energy efficiency in wireless communication. IEEE Trans. Wirel. Commun. 2019, 18, 4157–4170. [Google Scholar] [CrossRef] [Green Version]
- Björnson, E.; Özdogan, Ö.; Larsson, E.G. Intelligent reflecting surface versus decode-and-forward: How large surfaces are needed to beat relaying? IEEE Wirel. Commun. Lett. 2020, 9, 244–248. [Google Scholar] [CrossRef] [Green Version]
- Xu, D.; Yu, X.; Sun, Y.; Ng, D.W.K.; Schober, R. Resource allocation for secure IRS-assisted multiuser MISO Systems. In Proceedings of the 2019 IEEE Globecom Workshops, Waikoloa, HI, USA, 9–13 December 2019; pp. 1–6. [Google Scholar]
- Wu, Q.; Zhang, R. Intelligent reflecting surface enhanced wireless network via joint active and passive beamforming. IEEE Trans. Wirel. Commun. 2019, 18, 5394–5409. [Google Scholar] [CrossRef] [Green Version]
- Wu, Q.; Zhang, R. Towards smart and reconfigurable environment: Intelligent reflecting surface aided wireless network. IEEE Commun. Mag. 2020, 58, 106–112. [Google Scholar] [CrossRef] [Green Version]
- Zeng, Y.; Wu, Q.; Zhang, R. Accessing from the sky: A tutorial on UAV communications for 5G and beyond. Proc. IEEE. 2019, 107, 2327–2375. [Google Scholar] [CrossRef] [Green Version]
- Ranjha, A.; Kaddoum, G. URLLC facilitated by mobile UAV relay and RIS: A joint design of passive beamforming, blocklength, and UAV positioning. IEEE Internet Things J. 2021, 8, 4618–4627. [Google Scholar] [CrossRef]
- Sun, X.; Ng, D.W.K.; Ding, Z.; Xu, Y.; Zhong, Z. Physical layer security in UAV systems: Challenges and opportunities. IEEE Wirel. Commun. 2019, 26, 40–47. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Lu, H.; Sun, H. Channel estimation in IRS-enhanced mmWave system with super-resolution network. IEEE Commun. Lett. 2021, 25, 2599–2603. [Google Scholar] [CrossRef]
- Hu, S.; Rusek, F.; Edfors, O. Beyond massive MIMO: The potential of data transmission with large intelligent surfaces. IEEE Trans. Signal Process. 2018, 66, 2746–2758. [Google Scholar] [CrossRef] [Green Version]
- Lizhong, Z.; Tse, D.N.C. Diversity and multiplexing: A fundamental tradeoff in multiple-antenna channels. IEEE Trans. Inf. Theory 2003, 49, 1073–1096. [Google Scholar] [CrossRef] [Green Version]
- Alfattani, S.; Jaafar, W.; Hmamouche, Y.; Yanikomeroglu, H.; Yongaçoglu, A.; Đào, N.D.; Zhu, P. Aerial platforms with reconfigurable smart surfaces for 5G and beyond. IEEE Commun. Mag. 2021, 59, 96–102. [Google Scholar] [CrossRef]
- Wu, Q.; Xu, J.; Zeng, Y.; Ng, D.W.K.; Al-Dhahir, N.; Schober, R.; Swindlehurst, A.L. A Comprehensive overview on 5G-and-beyond networks with UAVs: From communications to sensing and intelligence. IEEE J. Select. Areas Commun. 2021, 39, 2912–2945. [Google Scholar] [CrossRef]
- Yang, L.; Meng, F.; Zhang, J.; Hasna, M.O.; Renzo, M.D. On the performance of RIS-assisted dual-hop UAV communications systems. IEEE Trans. Veh. Technol. 2020, 69, 10385–10390. [Google Scholar] [CrossRef]
- Zhang, Q.; Saad, W.; Bennis, M. Reflections in the sky: Millimeter wave communication with UAV-carried intelligent reflectors. In Proceedings of the 2019 IEEE Globecom Workshops, Waikoloa, HI, USA, 9–13 December 2019; pp. 1–6. [Google Scholar]
- Zhang, C.; Zhang, W.; Wang, W.; Yang, L.; Zhang, W. Research challenges and opportunities of UAV millimeter-wave communications. IEEE Wireless Commun. 2019, 26, 58–62. [Google Scholar] [CrossRef]
- Zhang, L.; Zhao, H.; Hou, S.; Zhao, Z.; Xu, H.; Wu, X.; Wu, Q.; Zhang, R. A survey on 5G millimeter wave communications for UAV-assisted wireless networks. IEEE Access 2019, 7, 117460–117504. [Google Scholar] [CrossRef]
- Feng, Z.; Ji, L.; Zhang, Q.; Li, W. Spectrum management for mmWave enabled UAV swarm networks: Challenges and opportunities. IEEE Commun. Mag. 2019, 57, 146–153. [Google Scholar] [CrossRef]
- Arun, V.; Balakrishnan, H. RFocus: Practical beamforming for small devices. arXiv 2019, arXiv:1905.05130. [Google Scholar]
- Liang, Y.-C.; Long, R.; Zhang, Q.; Chen, J.; Cheng, H.V.; Guo, H. Large intelligent surface/antennas (LISA): Making reflective radios smart. J. Commu. Inf. Netw. 2019, 4, 40–50. [Google Scholar] [CrossRef]
- Subrt, L.; Pechac, P. Intelligent walls as autonomous parts of smart indoor environments. IET Commun. 2012, 6, 1004–1010. [Google Scholar] [CrossRef]
- Tan, X.; Sun, Z.; Koutsonikolas, D.; Jornet, J.M. Enabling indoor mobile millimeter-wave networks based on smart reflect-arrays. In Proceedings of the 2018 IEEE Conference on Computer Communications (INFOCOM), Honolulu, HI, USA, 15–19 April 2018; pp. 270–278. [Google Scholar]
- Li, S.; Duo, B.; Yuan, X.; Liang, Y.; Renzo, M.D. Reconfigurable intelligent surface assisted UAV communication: Joint trajectory design and passive beamforming. IEEE Wirel. Commun. Lett. 2020, 9, 716–720. [Google Scholar] [CrossRef] [Green Version]
- Huang, J.; Xing, C.; Wang, C. Simultaneous wireless information and power transfer: Technologies, applications, and research challenges. IEEE Commun. Mag. 2017, 55, 26–32. [Google Scholar] [CrossRef]
- Zhao, J.; Yu, L.; Cai, K.; Zhu, Y.; Han, Z. RIS-aided ground-aerial NOMA communications: A distributionally robust DRL approach. IEEE J. Select. Areas Commun. 2022, 40, 1287–1301. [Google Scholar] [CrossRef]
- Mu, X.; Liu, Y.; Guo, L.; Lin, J.; Poor, H.V. Intelligent reflecting surface enhanced multi-UAV NOMA networks. IEEE J. Select. Areas Commun. 2022, 39, 3051–3066. [Google Scholar] [CrossRef]
- Jiao, S.; Fang, F.; Zhou, X.; Zhang, H. Joint beamforming and phase shift design in downlink UAV networks with IRS-assisted NOMA. J. Commu. Inf. Netw. 2020, 5, 138–149. [Google Scholar] [CrossRef]
- Li, J.; Liu, J. Sum rate maximization via reconfigurable intelligent surface in UAV communication: Phase shift and trajectory optimization. In Proceedings of the 2020 IEEE/CIC International Conference on Communications in China (ICCC), Virtual, 9–11 August 2020; pp. 124–129. [Google Scholar]
- Yu, K.; Yu, X.; Cai, J. UAVs assisted intelligent reflecting surfaces SWIPT system with statistical CSI. IEEE J. Select. Top. Signal Process. 2021, 15, 1095–1109. [Google Scholar] [CrossRef]
- Pan, Y.; Wang, K.; Pan, C.; Zhu, H.; Wang, J. UAV-assisted and intelligent reflecting surfaces-supported terahertz communications. IEEE Wirel. Commun. Lett. 2021, 10, 1256–1260. [Google Scholar] [CrossRef]
- Wei, Z.; Cai, Y.; Sun, Z.; Ng, D.W.K.; Yuan, J.; Zhou, M.; Sun, L. Sum-rate maximization for IRS-assisted UAV OFDMA communications systems. IEEE Trans. Wirel. Commun. 2021, 20, 2530–2550. [Google Scholar] [CrossRef]
- Wang, W.; Li, Y.; Xu, Q.; Peng, B.; Lu, M.; Lu, Q. Design of IRS-assisted UAV system for transmission line inspection. In Proceedings of the 2021 IEEE 21st International Conference on Communication Technology (ICCT), Tianjin, China, 13–16 October 2021; pp. 675–680. [Google Scholar]
- Xu, J.; Kang, X.; Zhang, R.; Liang, Y.-C. Joint power and trajectory optimization for IRS-aided master-auxiliary-UAV-powered IoT networks. In Proceedings of the 2021 IEEE Globecom Workshops, Madrid, Spain, 7–11 December 2021; pp. 1–6. [Google Scholar]
- Al-Jarrah, M.; Alsusa, E.; Al-Dweik, A.; So Daniel, K.C. Capacity analysis of IRS-based UAV communications with imperfect phase compensation. IEEE Wirel. Commun. Lett. 2021, 10, 1479–1483. [Google Scholar] [CrossRef]
- Ge, L.; Dong, P.; Zhang, H.; Wang, J.-B.; You, X. Joint beamforming and trajectory optimization for intelligent reflecting surfaces-assisted UAV communications. IEEE Access 2020, 8, 78702–78712. [Google Scholar] [CrossRef]
- Liu, X.; Liu, Y.; Chen, Y. Machine learning empowered trajectory and passive beamforming design in UAV-RIS wireless networks. IEEE J. Select. Areas Commun. 2021, 39, 2042–2055. [Google Scholar] [CrossRef]
- Mohamed, Z.; Aïssa, S. Resource allocation for energy-efficient cellular communications via aerial IRS. In Proceedings of the 2021 IEEE Wireless Communications and Networking Conference (WCNC), Nanjing, China, 29 March–1 April 2021; pp. 1–6. [Google Scholar]
- Mei, H.; Yang, K.; Shen, J.; Liu, Q. Joint trajectory-task-cache optimization with phase-shift design of RIS-assisted UAV for MEC. IEEE Wireless Commun. Lett. 2021, 10, 1586–1590. [Google Scholar] [CrossRef]
- Long, H.; Chen, M.; Yang, Z.; Li, Z.; Wang, B.; Yun, X.; Shikh-Bahaei, M. Joint trajectory and passive beamforming design for secure UAV networks with RIS. In Proceedings of the 2020 IEEE Globecom Workshops, Taipei, Taiwan, 7–11 December 2020; pp. 1–6. [Google Scholar]
- Cai, Y.; Wei, Z.; Hu, S.; Ng, D.W.K.; Yuan, J. Resource allocation for power-efficient IRS-assisted UAV communications. In Proceedings of the 2020 IEEE International Conference on Communications Workshops (ICC Workshops), Virtual, 7–11 June 2020; pp. 1–7. [Google Scholar]
- Al-Hilo, A.; Samir, M.; Elhattab, M.; Assi, C.; Sharafeddine, S. RIS-assisted UAV for timely data collection in IoT networks. arXiv 2021, arXiv:2103.17162. [Google Scholar]
- Michailidis, E.T.; Miridakis, N.I.; Michalas, A.; Skondras, E.; Vergados, D.J. Energy optimization in dual-RIS UAV-aided MEC-enabled internet of vehicles. Sensors 2021, 21, 4392. [Google Scholar] [CrossRef]
- Cang, Y.; Chen, M.; Yang, Z.; Chen, M.; Huang, C. Optimal resource allocation for multi-UAV assisted visible light communication. arXiv 2020, arXiv:2012.13200. [Google Scholar]
- Khalili, A.; Monfared, E.M.; Zargari, S.; Javan, M.R.; Yamchi, N.M.; Jorswieck, E.A. Resource management for transmit power minimization in UAV-assisted RIS HetNets supported by dual connectivity. IEEE Trans. Wirel. Commun. 2022, 21, 1806–1822. [Google Scholar] [CrossRef]
- Li, B.; Fei, Z.; Zhang, Y.; Guizani, M. Secure UAV communication networks over 5G. IEEE Wirel. Commun. 2019, 26, 114–120. [Google Scholar] [CrossRef]
- Nadeem, Q.-U.-A.; Kammoun, A.; Chaaban, A.; Debbah, M.; Alouini, M.-S. Intelligent reflecting surface assisted wireless communication: Modeling and channel estimation. arXiv 2019, arXiv:1906.02360. [Google Scholar]
- Poor, H.V.; Schaefer, R.F. Wireless physical layer security. PNAS 2016, 114, 19–26. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sun, G.; Tao, X.; Li, N.; Xu, J. Intelligent reflecting surface and UAV assisted secrecy communication in millimeter-Wave networks. IEEE Trans. Veh. Technol. 2021, 70, 11949–11961. [Google Scholar] [CrossRef]
- Fang, J.; Yang, Z.; Anjum, N.; Hu, Y.; Asgari, H.; Shikh-Bahaei, M. Secure intelligent reflecting surface assisted UAV communication networks. In Proceedings of the 2021 IEEE International Conference on Communications Workshops (ICC Workshops), Virtual, 14–23 June 2021; pp. 1–6. [Google Scholar]
- Fang, S.; Chen, G.; Li, Y. Joint optimization for secure intelligent reflecting surface assisted UAV networks. IEEE Wirel. Commun. Lett. 2021, 10, 276–280. [Google Scholar] [CrossRef]
- Guo, X.; Chen, Y.; Wang, Y. Learning-based robust and secure transmission for reconfigurable intelligent surface aided millimeter wave UAV communications. IEEE Wirel. Commun. Lett. 2021, 10, 1795–1799. [Google Scholar] [CrossRef]
- Li, S.; Duo, B.; Renzo, M.D.; Tao, M.; Yuan, X. Robust secure UAV communications with the aid of reconfigurable intelligent surfaces. IEEE Trans. Wirel. Commun. 2021, 20, 6402–6417. [Google Scholar] [CrossRef]
- Li, Y.; Yin, C.; Do-Duy, T.; Masaracchia, A.; Duong, T.Q. Aerial reconfigurable intelligent surface-enabled URLLC UAV systems. IEEE Access 2021, 9, 140248–140257. [Google Scholar] [CrossRef]
- Ma, D.; Ding, M.; Hassan, M. Enhancing cellular communications for UAVs via intelligent reflective surface. In Proceedings of the 2020 IEEE Wireless Communications and Networking Conference (WCNC), Virtual, 25–28 May 2020; pp. 1–6. [Google Scholar]
- Hua, M.; Yang, L.; Wu, Q.; Pan, C.; Li, C.; Swindlehurst, A.L. UAV-assisted intelligent reflecting surface symbiotic radio system. IEEE Trans. Wirel. Commun. 2021, 20, 5769–5785. [Google Scholar] [CrossRef]
- Samir, M.; Elhattab, M.; Assi, C.; Sharafeddine, S.; Ghrayeb, A. Optimizing age of information through aerial reconfigurable intelligent surfaces: A deep reinforcement learning approach. IEEE Trans. Veh. Technol. 2021, 70, 3978–3983. [Google Scholar] [CrossRef]
- Mahmoud, A.; Muhaidat, S.; Sofotasios, P.C.; Abualhaol, I.; Dobre, O.A.; Yanikomeroglu, H. Intelligent reflecting surfaces assisted UAV communications for IoT networks: Performance analysis. IEEE Trans. Green Commun. Netw. 2021, 5, 1029–1040. [Google Scholar] [CrossRef]
- Li, Z.; Uusitalo, M.A.; Shariatmadari, H.; Singh, B. 5G URLLC: Design challenges and system concepts. In Proceedings of the 2018 15th International Symposium on Wireless Communication Systems (ISWCS), Lisbon, Portugal, 28–31 August 2018; pp. 1–6. [Google Scholar]
- Sun, S.; Cao, Z.; Zhu, H.; Zhao, J. A survey of optimization methods from a machine learning perspective. IEEE Trans. Cybern. 2020, 50, 3668–3681. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bottou, L.; Curtis, F.E.; Nocedal, J. Optimization methods for large-scale machine learning. SIAM Rev. 2018, 60, 223–311. [Google Scholar] [CrossRef]
- Pogaku, A.C.; Do, D.-T.; Lee, B.M.; Nguyen, N.D. UAV-assisted RIS for future wireless communications: A Survey on optimization and performance analysis. IEEE Access 2022, 10, 16320–16336. [Google Scholar] [CrossRef]
- Goodfellow, I.; Bengio, Y.; Courville, A. Deep Learning; MIT Press: Cambridge, MA, USA, 2016. [Google Scholar]
- Sutton, R.S.; Barto, A.G. Introduction to Reinforcement Learning; MIT Press: Cambridge, MA, USA, 1998. [Google Scholar]
- Nguyen, A.; Yosinski, J.; Clune, J. Deep neural networks are easily fooled: High confidence predictions for unrecognizable images. In Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 7–12 June 2015; pp. 427–436. [Google Scholar]
- Woergoetter, F.; Porr, B. Reinforcement Learning. Scholarpedia 2008, 3, 1448. [Google Scholar] [CrossRef]
- Yu, J.; Liu, X.; Gao, Y.; Zhang, C.; Zhang, W. Deep learning for channel tracking in IRS-assisted UAV communications systems. IEEE Trans. Wirel. Commun. 2022; early access. [Google Scholar] [CrossRef]
- Chen, W.-T.; Huang, C.-S.; Wang, L.-C. Cooperative deep learning-based uplink distributed fair resource allocation for aerial reconfigurable intelligent surfaces wireless networks. In Proceedings of the 2021 30th Wireless and Optical Communications Conference (WOCC), Taipei, Taiwan, 7–8 October 2021; pp. 11–15. [Google Scholar]
- Jung, M.; Saad, W.; Jang, Y.; Kong, G.; Choi, S. Performance analysis of large intelligent surfaces (LISs): Asymptotic data rate and channel hardening effects. IEEE Trans. Wirel. Commun. 2020, 19, 2052–2065. [Google Scholar] [CrossRef] [Green Version]
- Khuwaja, A.A.; Chen, Y.; Zhao, N.; Alouini, M.-S.; Dobbins, P. A survey of channel modeling for UAV communications. IEEE Commun. Surv. Tutor. 2018, 20, 2804–2821. [Google Scholar] [CrossRef] [Green Version]
- Liu, L.; Zhang, S.; Zhang, R. CoMP in the sky: UAV placement and movement optimization for multi-user communications. IEEE Trans. Commun. 2019, 67, 5645–5658. [Google Scholar] [CrossRef] [Green Version]
- Alghamdi, R.; Alhadrami, R.; Alhothali, D.; Almorad, H.; Faisal, A.; Helal, S.; Shalabi, R.; Asfour, R.; Hammad, N.; Shams, A.; et al. Intelligent surfaces for 6G wireless networks: A survey of optimization and performance analysis techniques. IEEE Access 2020, 8, 202795–202818. [Google Scholar] [CrossRef]
- Basharat, S.; Hassan, S.A.; Pervaiz, H.; Mahmood, A.; Ding, Z.; Gidlund, M. Reconfigurable intelligent surfaces: Potentials, applications, and challenges for 6G wireless networks. IEEE Wirel. Commun. 2021, 28, 184–191. [Google Scholar] [CrossRef]
- Pang, X.; Sheng, M.; Zhao, N.; Tang, J.; Niyato, D.; Wong, K.-K. When UAV meets IRS: Expanding air-ground networks via passive reflection. IEEE Wirel. Commun. 2021, 28, 164–170. [Google Scholar] [CrossRef]
- You, C.; Kang, Z.; Zeng, Y.; Zhang, R. Enabling smart reflection in integrated air-ground wireless network: IRS meets UAV. IEEE Wirel. Commun. 2021, 28, 138–144. [Google Scholar] [CrossRef]
- Choi, J.; Cantos, L.; Choi, J.; Kim, Y.H. Sum rate optimization of IRS-aided uplink multiantenna NOMA with practical reflection. Sensors 2022, 22, 4449. [Google Scholar] [CrossRef] [PubMed]
- Wang, P.; Fang, J.; Dai, L.; Li, H. Joint transceiver and large intelligent surface design for massive MIMO mmWave systems. IEEE Trans. Wirel. Commun. 2020, 20, 1052–1064. [Google Scholar] [CrossRef]
- Thibbotuwawa, A.; Nielsen, P.; Zbigniew, B.; Bocewicz, G. Energy Consumption in Unmanned Aerial Vehicles: A Review of Energy Consumption Models and Their Relation to the UAV Routing; Springer: Cham, Switzerland, 2018. [Google Scholar]
- Thibbotuwawa, A.; Bocewicz, G.; Radzki, G.; Nielsen, P.; Banaszak, Z. UAV mission planning resistant to weather uncertainty. Sensors 2020, 20, 515. [Google Scholar] [CrossRef] [Green Version]
- Fu, S.; Tang, Y.; Wu, Y.; Zhang, N.; Gu, H.; Chen, C.; Liu, M. Energy-efficient UAV-enabled data collection via wireless charging: A reinforcement learning approach. IEEE Internet Things J. 2021, 8, 10209–10219. [Google Scholar] [CrossRef]
- Lahmeri, M.-A.; Kishk, M.A.; Alouini, M.-S. Charging techniques for UAV-assisted data collection: Is laser power beaming the answer? IEEE Commun. Mag. 2022, 60, 50–56. [Google Scholar] [CrossRef]
- Zhu, K.; Yang, J.; Zhang, Y.; Nie, J.; Lim, W.Y.B.; Zhang, H.; Xiong, Z. Aerial refueling: Scheduling wireless energy charging for UAV enabled data collection. IEEE Trans. Green Commun. Netw. 2022; early access. [Google Scholar] [CrossRef]
- Wang, Y.; Su, Z.; Zhang, N.; Li, R. Mobile wireless rechargeable UAV networks: Challenges and solutions. IEEE Commun. Mag. 2022, 60, 33–39. [Google Scholar] [CrossRef]
- Khan, W.U.; Lagunas, E.; Ali, Z.; Javed, M.A.; Ahmed, M.; Chatzinotas, S.; Ottersten, B.; Popovski, P. Opportunities for physical layer security in UAV communication enhanced with intelligent reflective surfaces. arXiv 2022, arXiv:2203.16907. [Google Scholar]
- Zhao, H.; Hao, J.; Guo, Y. Joint trajectory and beamforming design for IRS-assisted anti-jamming UAV communication. In Proceedings of the 2022 IEEE Wireless Communications and Networking Conference (WCNC), Austin, TX, USA, 10–13 April 2022; pp. 369–374. [Google Scholar]
- Li, Y.; Zhang, R.; Zhang, J.; Gao, S.; Yang, L. Cooperative jamming for secure UAV communications with partial eavesdropper information. IEEE Access 2019, 7, 94593–94603. [Google Scholar] [CrossRef]
- Hou, Z.; Chen, J.; Huang, Y.; Luo, Y.; Wang, X.; Gu, J.; Xu, Y.; Yao, K. Joint trajectory and passive beamforming optimization in IRS-UAV enhanced anti-jamming communication networks. China Commun. 2022, 19, 191–205. [Google Scholar] [CrossRef]
- Jia, H.; Zhong, J.; Janardhanan, M.N.; Chen, G. Ergodic capacity analysis for FSO communications with UAV-equipped IRS in the presence of pointing error. In Proceedings of the 2020 IEEE International Conference on Communication Technology (ICCT), Nanning, China, 28–31 October 2020; pp. 949–954. [Google Scholar]
- Malik, S.; Saxena, P.; Chung, Y.H. Performance analysis of a UAV-based IRS-assisted hybrid RF/FSO link with pointing and phase shift errors. J. Opt. Commun. Netw. 2022, 14, 303–315. [Google Scholar] [CrossRef]
Figure 1.
A terrestrial communications system with UAV-mounted IRSs.

Figure 2.
Five representative scenarios of IRS-assisted UAV communications.


{kind=link}
{kind=link}
{kind=link}
Table 1.
Summary of previous works relevant to improvement of spectral efficiency.
| Reference | Objective | Design Variables | Scenario |
|---|---|---|---|
| [58] | Maximize sum rate | UAV trajectory, IRS configuration, uploading power control | (c) |
| [59] | Maximize sum rate | 3D placement, transmit power of UAVs, decoding orders among users | (a) |
| [60] | Maximize the rate of the strong user while guaranteeing the target rate of the weak user | Transmit beamforming, IRS phase shift | (e) |
| [56] | Maximize the average sum rate | IRS passive beamforming, UAV trajectory | (a) |
| [61] | Maximize the average sum rate | UAV trajectory, IRS phase shift | (a) |
| [62] | Maximize the average achievable rate | Power splitting ratio, transmit beamforming, phase shift, UAV trajectory | (a) |
| [63] | Maximize the minimum average achievable rate of all users | UAV trajectory, IRS phase shift, power control, sub-band allocation | (a) |
| [64] | Maximize the sum rate | UAV trajectory, IRS scheduling, resource allocation | (a) |
| [65] | Maximize the minimum throughput of information decoding receivers | Hover position, beamforming vector of UAV, IRS phase shift, transmit power of UAV | (a) |
| [66] | Maximize the total throughput | Master UAV’s trajectory, master UAV’s transmit power | (e) |
| [67] | Maximize channel capacity | IRS phase shift | (e) |
Table 2.
Summary of previous works relevant to improvement of energy efficiency.
| Reference | Objective | Design Variables | Scenario |
|---|---|---|---|
| [68] | Maximize the received power at the ground users | UAV active beamforming, IRS passive beamforming, UAV trajectory | (a) |
| [69] | Minimize the energy consumption of UAV | Movement of UAV, IRS phase shift, power allocation policy | (a) |
| [70] | Maximize the energy efficiency | Transmit power of users, BS active beamforming, IRS passive beamforming | (d) + (e) |
| [71] | Maximize the energy efficiency | UAV trajectory, task offloading, cache with the phase shift, design of IRS | (a) |
| [72] | Maximize the secrecy energy efficiency | UAV trajectory, IRS phase shift, user allocation, transmit power control | (e) |
| [73] | Minimize the average total power consumption of the system | Resource allocation strategy, UAV trajectory, UAV velocity, IRS phase shift | (a) |
| [74] | Maximize the number of available devices | UAV trajectory, IRS phase shift, user allocation and transmit power | (a) |
| [75] | Minimize the weighted total energy consumption | Transmit power, time slot scheduling, task allocation | (c) |
| [76] | Minimize the energy consumption of the UAVs | UAV deployment, IRS phase shift, user association, IRS association | (a) |
| [77] | Minimize the total transmit power | UAV trajectory and velocity, IRS phase shift, subcarrier allocation | (d) + (e) |
| [47] | Improve the coverage and reliability of UAV communications | Outage probability, average bit error rate (BER), average capacity | (b) |
Table 3.
Summary of previous works relevant to improvement of security.
| Reference | Objective | Design Variables | Scenario |
|---|---|---|---|
| [81] | Maximize the secrecy rate | UAV-BS and IRS positions, UAV-BS and IRS beamforming | (a) |
| [82] | Maximize the secrecy rate | UAV location, IRS phase shift | (e) |
| [83] | Maximize the average secrecy rate | IRS phase shift, UAV trajectory, transmit power of UAV | (a) |
| [84] | Maximize the sum secrecy rate of all legitimate users | UAV trajectory, coefficients of the IRS elements, UAV active beamforming | (a) |
| [85] | Maximize the worst-case secrecy rate | UAV trajectory, IRS passive beamforming, transmit power of the legitimate transmitters | (a) |
Table 4.
Summary of previous works relevant to improvement of other performance.
| Reference | Objective | Design Variables | Scenario |
|---|---|---|---|
| [86] | Optimize resource allocation | UAV deployment, IRS phase shift, transmit block length, MBS power | (e) |
| [40] | Minimize the total decoding error rate | UAV position, block length | (a) + (b) |
| [87] | Maximize the signal gain | IRS location, IRS altitude, IRS to BS distance | (c) |
| [88] | Minimize the weighted sum BER | UAV trajectory, IRS phase shift, IRS scheduling (for fairness) | (a) |
| [89] | Minimizing the expected sum AoI | UAV altitude, scheduling, IRS phases shift | (d) |
| [90] | Extend the network coverage and improve the communication reliability, as well as spectral efficiency | Ergodic capacity, SER, average SNR | (e) |
Table 5.
Main features of the previous works based on ML.
| Reference | Objective | Concerned Variables | Machine Learning Technique |
|---|---|---|---|
| [65] | Minimum decoding error probability of the worst-case user and optimize the resource allocation | UAVs deployment | DNN |
| [99] | Improvement of channel estimation performance | UAV trajectory and speed, IRS phase shift, movement of users, propagation delay, time delay | DNN |
| [100] | Dynamic resource block allocation | UAV location, IRS phase shift, RB allocation | Cooperative DNN |
| [69] | Minimize the energy consumption of UAV | UAV trajectory, IRS phase shift, power allocation policy | D-DQN |
| [58] | Maximize the average sum-rate | UAV trajectory, IRS configuration, power control | DRL |
| [66] | Maximize the total throughput | UAV trajectory, transmit power control | MADRL |
| [84] | Maximize the sum secrecy rate of all legitimate users | UAV trajectory, UAV active beamforming, coefficients of the IRS elements | Twin-DDPG DRL |
| [89] | Minimizing the expected sum AoI | UAV altitude, IRS phase shift, communication patterns | DRL-based PPO |
| [77] | Minimize the total transmit power | UAV trajectory, UAV velocity, IRS phase shift, subcarrier allocation for MBS | Dueling deep Q-network |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Park, K.-W.; Kim, H.M.; Shin, O.-S. A Survey on Intelligent-Reflecting-Surface-Assisted UAV Communications. Energies 2022, 15, 5143. https://doi.org/10.3390/en15145143
AMA Style
Park K-W, Kim HM, Shin O-S. A Survey on Intelligent-Reflecting-Surface-Assisted UAV Communications. Energies. 2022; 15(14):5143. https://doi.org/10.3390/en15145143
Chicago/Turabian StylePark, Ki-Won, Hyeon Min Kim, and Oh-Soon Shin. 2022. "A Survey on Intelligent-Reflecting-Surface-Assisted UAV Communications" Energies 15, no. 14: 5143. https://doi.org/10.3390/en15145143
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.